Изобретение касается устройства для бесконтактного измерения расстояния посредством ультразвука.
Известно устройство для измерения расстояния посредством ультразвука, содержащее электроакустический преобразователь, включающий передатчик для подачи сформированного в виде импульсов сигнала, и приемник для приема сигнала, отраженного от расположенного на подлежащем измерению расстоянии отражателя, и для преобразования эхо-сигнала в электрический сигнал, подаваемый на схему оценки данных, причем схема оценки данных содержит по меньшей мере один пороговый переключатель для сравнения электрического сигнала с изменяемым значением порога переключения, причем пороговый переключатель выполнен с возможностью подачи соответствующего сигнала при превышении порога переключения, микрокомпьютер, содержащий средства измерения времени для измерения времени между началом сформированного в виде импульсов сигнала возбуждения и моментом времени первого превышения порога переключения. Так как уровень отраженного сигнала зависит не только от уровня излученного сигнала, но и от качества отражателя, при оценке отраженного сигнала (эхо-сигнала) возникают проблемы.
Возможность использования эхо-сигнала для формирования метки времени заключается в сравнении эхо-сигнала в переключателе порогового значения с порогом переключения, так что на выходе переключателя порогового значения сигнал появляется в том случае, если отраженный сигнал (эхо-сигнал) превышает пороговое значение.
Установление уровня порога переключения должно осуществляться так, чтобы он, с одной стороны, был достаточно высок, чтобы ослаблять нежелательный посторонний отраженный сигнал, а с другой - даже при сильно поглощающем эхо-сигнал отражателе он должен превышать порог переключения, так как в противном случае невозможна никакая индикация.
В основу изобретения положена задача создать такое устройство для измерения расстояния посредством ультразвука, которое позволяло бы установить достаточно высокий порог переключения, при котором была бы возможна индикация.
Поставленная задача решается благодаря тому, что в устройстве по первому варианту его выполнения выход порогового переключателя через аналогово-цифровой преобразователь соединен с микрокомпьютером, а вход порогового переключателя, к которому приложен порог S переключения, соединен с микрокомпьютером, содержащим средства измерения времени для определения разностного промежутка Td между заданными превышениями пороговых значений эхо-сигналом S3 в зависимости от которого Td устанавливается порог переключения S.
Преимущество устройства согласно изобретению по первому варианту выполнения по сравнению с известными устройствами состоит в том, что или вообще не используется жесткий порог переключения, или используется порог переключения, уровень которого может изменяться в зависимости от обработанных эхо-сигналов или от предшествующих эхо-сигналов, или усиление эхо-сигнала может изменяться в зависимости от предшествующих отраженных сигналов.
Согласно второму варианту выполнения устройства поставленная задача решается благодаря тому, что оно содержит усилитель с изменяемым коэффициентом K усиления для подачи на него отраженного сигнала, через пороговый переключатель и аналого-цифровой преобразователь (АЦП), соединенный с микрокомпьютером, включающим средства измерения времени для определения разностного промежутка Td времени между заданными превышениями пороговых значений эхо-сигналом, в зависимости от которого устанавливается коэффициент K усиления, при этом порог переключения S порогового переключателя постоянный.
Согласно этому варианту выполнения изобретения уровень эхо-сигнала поддерживается примерно постоянным путем изменения интенсивности излученного сигнала в зависимости от ранее полученных отраженных сигналов и может сравниваться с жестким пороговым значением.
Согласно третьему варианту выполнения устройства по изобретению поставленная задача решается благодаря тому, что в нем указанный усилитель посредством порогового переключателя и АЦП соединен с микрокомпьютером, а также с дополнительной электроникой, состоящей из интегратора и запускающего его старт-стопного электронного блока, для усиления по силе подаваемого от передатчика сигнала, причем микрокомпьютер содержит средства измерения времени для определения разностного промежутка Td между заданными превышениями пороговых значений эхо-сигналом S3, в зависимости от которого изменяется сила подаваемого сигнала, причем порог S переключения порогового переключателя при этом постоянный.
Также предпочтительно, чтобы между электроакустическим преобразователем и пороговым переключателем были расположены соответственно выпрямитель и фильтр для выпрямления и фильтрации эхо-сигнала с возможностью получения модуляционной огибающей эхо-сигнала и подачи на пороговый переключатель, так чтобы разностный промежуток Td времени мог быть определен путем оценки модуляционной огибающей эхо-сигнала.
Разностный промежуток Td времени устанавливается преимущественно в зависимости от числа превышений порога переключения эхо-сигнала S3.
Поданный сигнал S1 предпочтительно передается только в течение длительности одного вентильного импульса, а длина Tт этого вентильного импульса находится в зависимости от ранее зарегистрированного эхо-сигнала S3, причем выбор длины вентильного импульса осуществляется посредством микрокомпьютера.
При этом подаются два вентильных импульса предпочтительно и поданный сигнал S1 передается только в течение длительности вентильного импульса, причем интервал между вентильными импульсами определяется посредством микрокомпьютера в зависимости от ранее принятого эхо-сигнала S3.
Кроме того, интервал между двумя вентильными импульсами определяется в микрокомпьютере путем моделирования, причем электроакустический преобразователь представляет собой независимую от времени линейную систему.
Выходной сигнал электроакустического преобразователя сформирован из входного сигнала путем свертки входного сигнала с функцией Грина независимой от времени линейной системы.
Как следует из изложенного, вентильное время не может быть сколь угодно коротким, выходной сигнал электроакустического преобразователя, т.е. излученный сигнал, не может ослабляться сколь угодно. Путем установления двух коротких промежутков вентильного времени, расстояние между которыми выбирается надлежащим образом, можно получить особенно сильное ослабление выходного сигнала, если осуществленное во втором вентильном промежутке времени возбуждение по меньшей мере частично компенсирует осуществленное в течение первого вентильного промежутка времени, т.е. можно добиться расширения диапазона в направлении уменьшения излученного сигнала.
На фиг. 1,a показана схематически компоновка измерительной аппаратуры, первый вариант; на фиг. 1,b - то же, второй вариант; на фиг. 1,c - дополнение к схеме, приведенной на фиг. 1,a; на фиг. 1,d - пример выполнения измерительной системы; на фиг. 2 - временная характеристика излученного сигнала, а также принятого отраженного сигнала, включая порог переключения; на фиг. 3 - характеристика отраженного сигнала (эхо-сигнала) по времени T с важными для оценки отрезками времени; на фиг. 4 - пример выполнения устройства регулирования; на фиг. 5 и 6 - осциллограммы для оценки с помощью колебательной мембраны; на фиг. 7 - электроакустический преобразователь; на фиг. 8 - 10 излученные сигналы, посылаемые электроакустическим преобразователем при различных импульсных возбуждениях, как измеренные, так и рассчитанные.
На фиг. 1,a - d позицией обозначены электроакустический преобразователь 10, в котором формируются излучаемые сигналы S1, которые попадают на отражатель 11, отражаются оттуда и вновь попадают в преобразователь 10 в виде отраженного сигнала эхо-сигнала S3.
В электроакустическом преобразователе 10 отраженные сигналы преобразуются в электрические сигналы, которые в последующей схеме 12 оценки данных оцениваются для определения расстояния a между электроакустическим преобразователем 10 и отражателем 11. В зависимости от способа оценки конструкция схемы 12 оценки данных может быть различной. На фиг.1,a в качестве существенного конструктивного элемента предусмотрен пороговый переключатель 13, к неинвертируемому входу (+) которого подается отраженный сигнал, в то время как на его инвертируемый вход (-) подается изменяемая пороговая величина и образует переменный порог переключения. Выход порогового переключателя 13 через АЦП 17 соединен с микрокомпьютером 14, который по линии 15 может воздействовать на пороговую величину S, поданную на инвертируемый вход порогового переключателя 13.
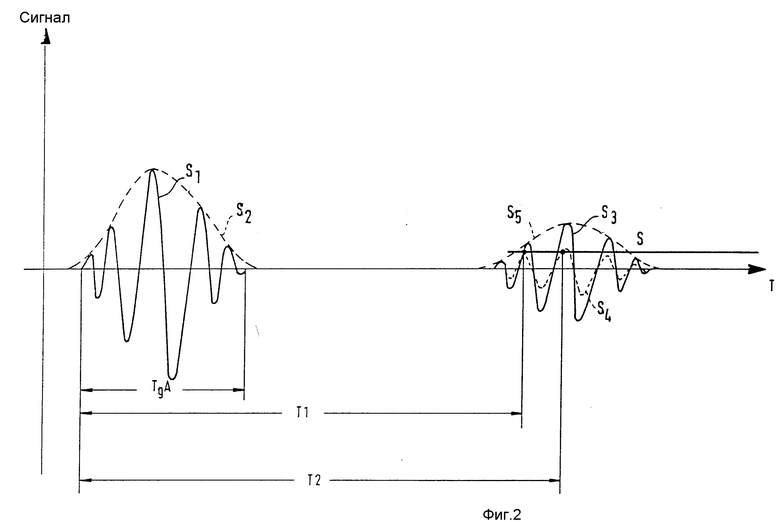
На графиках излученного сигнала S1 и отраженного сигнала (эхо-сигнала) в зависимости от времени T (фиг. 2) можно видеть, что излученный сигнал S1 состоит из пакета импульсов с несколькими максимумами и минимумами, причем распределение импульсов имеет колоколообразную модуляционную огибающую S2.
Если электроакустический преобразователь 10 излучает сигнал S1, то этот сигнал по истечении времени T1 отражается от отражателя 11, который находится на некотором расстоянии a, и превращается в эхо-сигнал S3, форма и модуляционная кривая которого в значительной степени соответствуют форме и модуляционной огибающей сигнала S1, однако ослаблены по уровню.
В зависимости от типа отражателя 11, а также расстояния между электроакустическим преобразователем и отражателем принятый отраженный сигнал (эхо-сигнал) S3 имеет большую амплитуду или при плохом отражении меньшую амплитуду. На фиг. 2 отраженный сигнал S4 с меньшей амплитудой вновь имеет колоколообразную форму. На основании этого временного промежутка между излученным сигналом и отраженным сигналом можно определить расстояние между электроакустическим преобразователем 10 и отражателем 11, если знать скорость распространения ультразвука, однако необходимо это расстояние определить однозначно, с учетом различных уровней отраженных сигналов.
Для установления времени T1 между излученным сигналом S1 и отраженным сигналом отраженный сигнал подается в пороговый переключатель 13, который имеет порог переключения S и всегда тогда, когда отраженный сигнал превышает порог переключения, выдает выходной сигнал, который в АЦП 17 преобразуется в цифровые величины и оценивается в микрокомпьютере.
Промежуток времени между началом излученного сигнала S1 и первым превышением порога переключения отраженным сигналом S3 (эхо-сигналом) измеряется в микрокомпьютере и затем используется для определения расстояния между электроакустическим преобразователем 10 и отражателем 11, причем можно видеть (фиг. 2), что это время при высоком уровне отраженного сигнала S3 равно T1, а при более низком уровне отраженного сигнала и том же пороге S переключения равно T2, так как в этом случае даже вторая положительная полуволна отраженного сигнала еще не может превысить порог S переключения, и только третья положительная волна превышает порог S переключения.
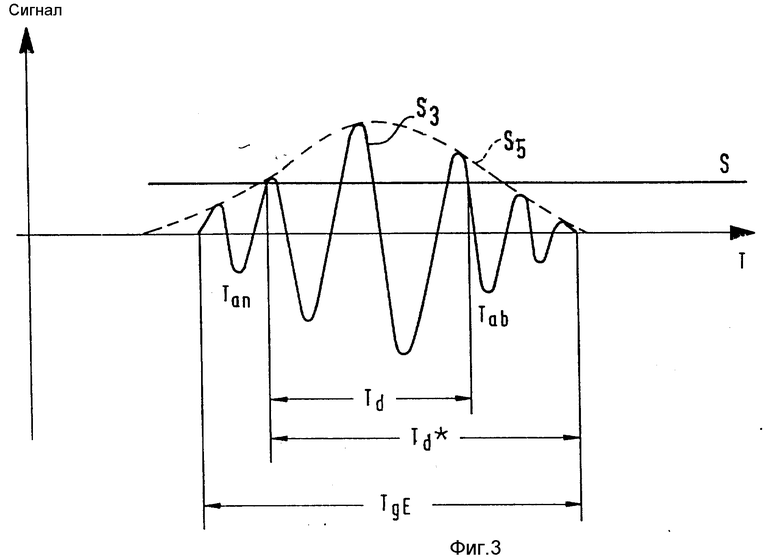
Чтобы промежутки T1 и T2 времени не привели к ошибочному измерению, порог переключения изменяется в зависимости от предшествующего отраженного сигнала (фиг. 1). Возможность, как эти изменения могут быть реализованы, поясняется фиг. 3, где приведена диаграмма отраженного сигнала в зависимости от времени T, кроме того, показан порог переключения S. Первое превышение порога переключения S сигналом S3 обозначена символом Tan, последнее превышение - символом Tab. Разность между Tan и Tab обозначена символом Td и разность между исчезновением сигнала S3 и временем Tan обозначена как промежуток T
Разность Td промежутков Tab и Tan времени может служить критерием относительного положения порога переключения к мгновенной величине отраженного сигнала. При более низком уровне отраженного сигнала только средний, т.е. наибольший максимум, превысил бы порог переключения. В этом случае передний фронт максимума определял бы Tan и задний Tab. Следствием этого был бы значительно более короткий промежуток Td времени, чем в примере на фиг. 3.
При еще более низком уровне отраженного сигнала порог переключения вообще больше не достигается или не превышается, в этом случае разностный промежуток Td времени больше не может быть определен.
При увеличенном уровне отраженного сигнала разностный промежуток Td времени возрастает почти до общей длительности Tg отраженного сигнала, так как в этом случае уже первый и еще последний максимумы могут превышать порог переключения. Очевидно, что разностный промежуток Td времени представляет собой критерий, который позволяет надлежащим образом приводить в соответствие порог переключения с регистрируемым отраженным сигналом, причем для случая, когда Td не может быть определен, необходимо принимать отдельную меру.
Преобразование разностного промежутка Td времени в пригодный для обработки сигнал, например постоянное напряжение, осуществляется с помощью микрокомпьютера 14 и позволяет особенно простому смещению порога S переключения, причем регулирование или смещение порога переключения предусмотрено таким, чтобы следствие смещения порога переключения промежуток Td времени оставался примерно постоянным. Тогда и метка Tan времени также становится независимой от величины отраженного сигнала S3, детектируются даже слабые отраженные сигналы, и метка времени всегда появляется в том же самом месте серии волн сигнала S3.
Для воздействия порога переключения вместо разностного промежутка Td времени может использоваться также разностный промежуток T
Наряду с воздействием порога переключения с помощью образованного из разностного промежутка Td времени или разностного промежутка T
В схеме 12 на фиг. 1,b между электроакустическим преобразователем 10 и пороговым переключателем 13 дополнительно расположен регулируемый усилитель 18, коэффициент усиления которого может изменяться микропроцессором 14 по линии 19, причем изменение коэффициента усиления осуществляется в зависимости от ранее определенного разностного промежутка Td или T
Возможность использования разностного промежутка Td или T
Так как мембрана совершает переходные колебания, то во время этих колебаний отраженный сигнал приниматься не может. Отраженный сигнал смещает измерительный сигнал в соответствии с промежутком времени T1. Мембрана, работающая теперь как приемник, колеблется до тех пор, пока остается перейденной заданная пороговая величина, а измерительный сигнал остается смещенным. Временем, в течение которого измерительный сигнал остается смещенным, является время Td. Регулирование времени Td, т.е. поддержание постоянства, происходит теперь вследствие воздействия интенсивности передачи.
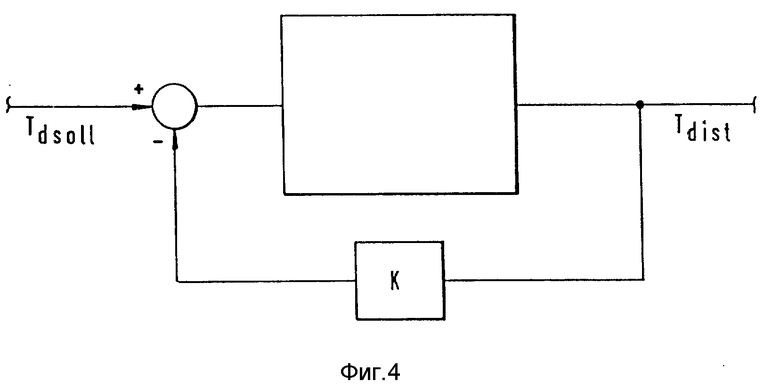
На фиг. 4 приведены три варианта выполнения устройства регулирования, когда метка Tan времени делается независимой от уровня отраженного сигнала. При этом задается заданное время Tdsoll, измеряется фактическое время Tdist и сравнивается с заданным временем Tdsoll. В зависимости от результата сравнения увеличивается или уменьшается коэффициент K усиления усилителя 18, изменяется пороговая величина порогового переключателя 13 или уровень передаваемого импульса.
Для определения разностного промежутка Td времени могут быть использованы следующие возможности.
1. В микропроцессоре 14 подсчитывается количество превышений порога переключения отраженным сигналом S3 (эхо-сигналом), в зависимости от этого количества микропроцессор соответствующим образом воздействует на триггерный порог или изменяет усиление усилителя 18. При этом при большем числе превышений порога переключения, которое свидетельствует о высоком уровне отраженного сигнала, или повышается порог S переключения или уменьшается коэффициент K усиления усилителя 18. Обе меры способствуют тому, что появляется надлежащее число превышений, например три, независимо от фактического уровня отраженного сигнала S3.
Возможность определения времени Td или получения независимого от времени Td сигнала заключается в том, что отраженный сигнал выпрямляется и фильтруется так, что получается модуляционная огибающая отраженного сигнала. С этой целью отраженный сигнал направляется через выпрямитель 21 и фильтр 22, например полосовой фильтр, от электроакустического преобразователя 10 к пороговому каскаду 13 или к регулируемому усилителю 18 (фиг. 1,c).
Если, кроме того, с помощью порога переключения через старт-стопный электронный блок 24 запускается интегратор 23, который при превышении этого порога переключения вновь останавливается, в качестве интегрированного сигнала получается постоянное напряжение, которое пропорционально времени, в течение которого был включен интегратор 23. Это постоянное напряжение может использоваться для воздействия усиления усилителя 18 (фиг. 1,d).
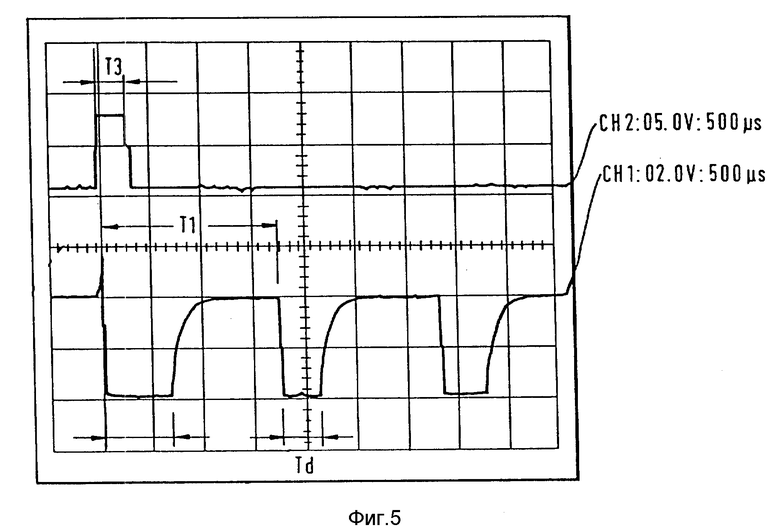
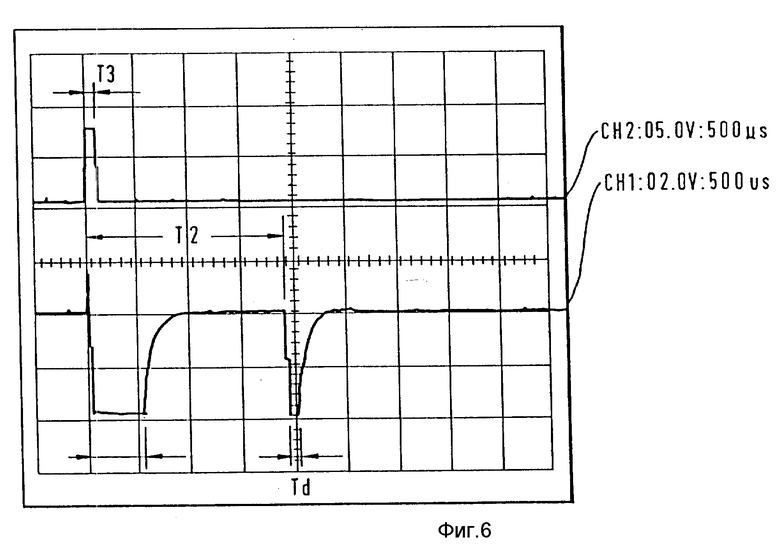
При показанном на фиг. 5 распределении сигнала время передачи выбирается настолько большим, что принимаются даже вторичные отраженные сигналы. На фиг. 6 приведен пример, когда время передачи было сокращено путем изменения заданной величины. В этом случае устанавливается более короткое время Td, так что второй отраженный сигнал больше не превышает этот порог. Измеренное при этом время T2 прохождения импульса в соответствии с фиг. 6 больше, чем время T1 прохождения импульса с пороговой величиной в соответствии с фиг. 5.
В другом примере выполнения устройства по изобретению, который относится к возможности изменения излученного сигнала S1 в зависимости от предшествующего отраженного сигнала S3, в электроакустическом преобразователе 10 сигнал осциллятора передается дальше только для определенных промежутков времени. При этом осциллятор постоянно колеблется, дальнейшая передача сигнала осциллятора возможна с помощью вентильного импульса, причем дальнейшая передача осуществляется только в течение длительности вентильного импульса. Длительность Tт этого вентильного импульса является решающей для длительности Tga излученного сигнала S1, однако она является решающей также для амплитуды излученного сигнала S1. При этом с увеличением длительности вентильного импульса возрастает амплитуда выше определенной длительности вентильного импульса, амплитуда однако остается постоянной, следовательно, благодаря увеличению вентильного времени она больше повышаться не может.
Минимальная амплитуда получается благодаря тому, что вентильный импульс выбирается очень коротким, так что от осциллятора к мембране подается только очень короткий импульс. Так как вентильный импульс не может быть установлен сколь угодно коротким, излученный электроакустическим преобразователем сигнал не может изменяться сколь угодно в направлении минимальной интенсивности, так что в целом излученный сигнал может изменяться только в пределах определенного диапазона.
Увеличение переменного диапазона в направлении еще более малых интенсивностей излучаемого сигнала в этом примере выполнения устройства по изобретению реализуется благодаря тому, что управление электроакустическим преобразователем осуществляется двумя отдельными вентильными импульсами, причем промежуток между этими вентильными импульсами выбирается таким, чтобы второй импульс действовал ослабляюще в отношении первого импульса.
Если оценка отраженного сигнала показывает, что необходим излученный сигнал, амплитуда которого вследствие укорочения вентильного импульса не может больше уменьшаться, дальнейшего уменьшения амплитуды можно добиться путем подачи второго короткого вентильного импульса. Оценка отраженных сигналов и определение импульсов осуществляется в микрокомпьютере 14.
Для пояснения взаимосвязей необходимо отметить следующее. Если электроакустический преобразователь рассматривается как независимая от времени линейная система (LT1-система), то ее временная характеристика может быть охарактеризована с помощью управляющего импульса Ue ( τ ) в качестве входной функции и отраженного сигнала Ua ( τ ), который соответствует сигналу S3, в качестве выходной функции появляющийся отраженный сигнал получается при свертке входной функции с функцией Грина G(T) независимой от времени линейной системы, т.е.
Ua(T) = Ue(T-τ)×G(τ)d, ,
Если короткие вентильные импульсы в приближенном виде понимаются как δ -функция, то это известным образом становится ответом системы на короткий входной импульс для функции Грина. Для двух следующих один за другим импульсов сигнал свертки прибавляется к сумме, в которой две функции Грина смещены по времени, которые относятся соответственно к δ -импульсу. В зависимости от выбора интервала между вентильными импульсами появляется усиление или ослабление импульса передачи.
Поэтому с помощью надлежащего интервала для уменьшения интенсивности передачи достигается ослабление, надлежащие интервалы могут быть определены экспериментально или арифметически, причем вычисления выполняются, например, в микрокомпьютере 14.
В лабораторных испытаниях были проведены как измерения, так и моделирование. При этом были получены хорошие соответствия между моделированием и измерением, тем самым было доказано, что система в хорошем приближении может рассматриваться как независимая от времени линейная система (LT1-система).
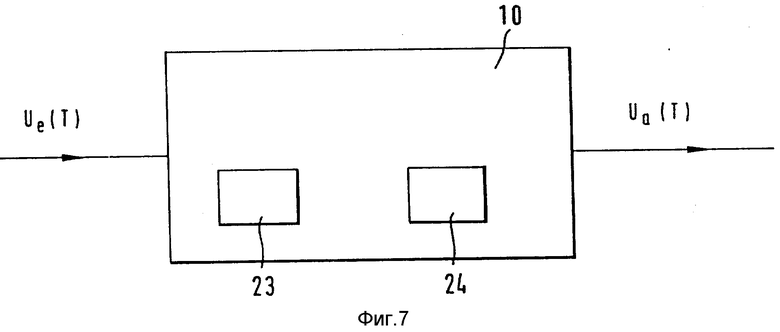
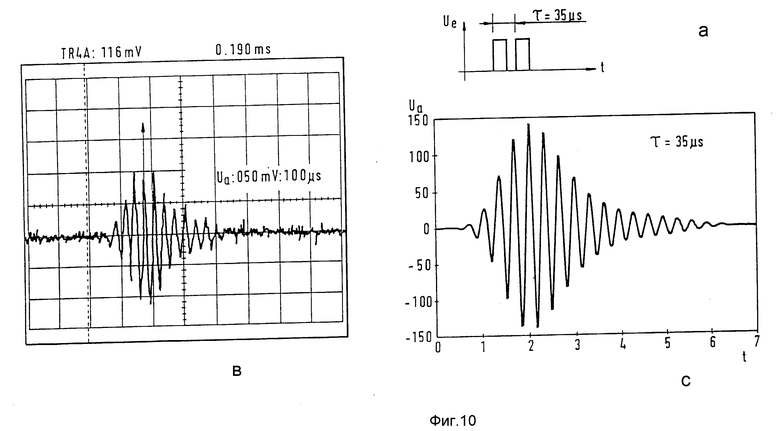
На фиг. 7 схематически представлен электроакустический преобразователь, к которому подается входной импульс Ue ( τ ), длительность которого равна T3 и интервал которого, (можно позаимствовать из фиг. 8) соответствует T4. При этом на выходе преобразователя появляется выходное напряжение Ua(T).
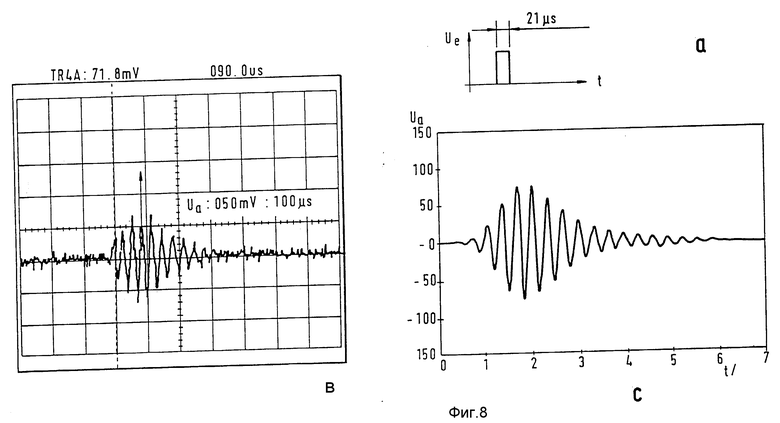
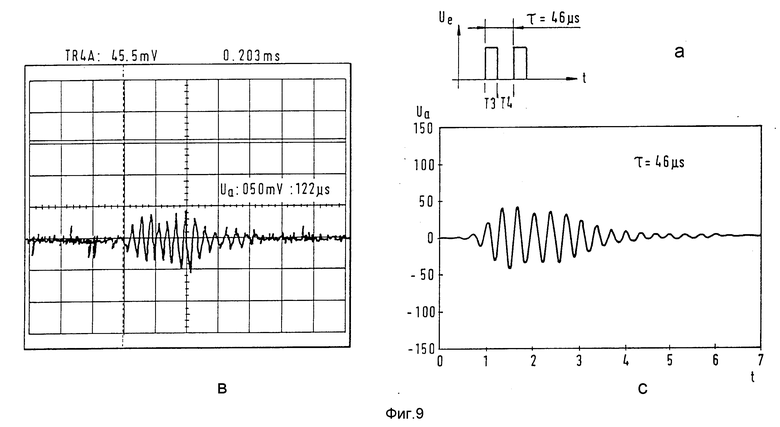
Характеристика сигнала, который появляется после возбуждения с помощью вентильных импульсов (фиг. 8-10) показана для трех вариантов, где фиг. 8,a, 9, a и 10,a - вентильные импульсы; на 8,b, 9,b и 10,b - измеренные сигналы; на фиг. 8,c, 9,c и 10,c - вычисленные сигналы.
При возбуждении с помощью одного единственного вентильного импульса по возможности короткой длительности в соответствии с фиг. 8,a получается представленное на фиг. 8,b распределение интенсивности. Это распределение примерно соответствует показанной на фиг. 8,c, определенной арифметически функции Грина независимой от времени линейной системы.
С помощью показанного на фиг. 10,a распределения импульсов получается повышение интенсивности, которое может быть определено как экспериментально, так и арифметически (фиг. 10,b,c).
Распределение импульсов или выбор вентильных промежутков времени в соответствии с фиг. 9,a дает ослабление интенсивности, соответствующие графики распределения представлены на фиг. 9,b,c.
Если рассматривают максимальную амплитуду в зависимости от интервала T4 между вентильными импульсами, получается периодическая смена усиления и ослабления. При надлежащем выборе интервала T4 можно представить другой диапазон воздействия сигналов, причем в соответствии с изобретением главным образом используется диапазон ослабления, так как диапазон усиления может быть получен также путем увеличения промежутка вентильного времени.
Изобретение относится к устройству для измерения расстояния с помощью ультразвука. Устройство содержит ультразвуковое передающее устройство, и приемное устройство преобразующее принятый сигнал в электрический, а также пороговый переключатель, связанный через аналого-цифровой преобразователь с микрокомпьютером, который измеряет временной интервал между излученным и принятым сигналами и интервал между заданными превышениями пороговых значений эхо-сигналом. В зависимости от интервала между заданными превышениями устанавливают порог порогового переключателя. В других вариантах выполнения устройства вводится усилитель с изменяемым коэффициентом усиления, который своим выходом подключается к пороговому переключателю, а регулировка коэффициента усиления осуществляется микрокомпьютером непосредственно или путем воздействия на старт-стопный электронный блок, подключенный к усилителю. 3 с. и 6 з.п. ф-лы, 10 ил.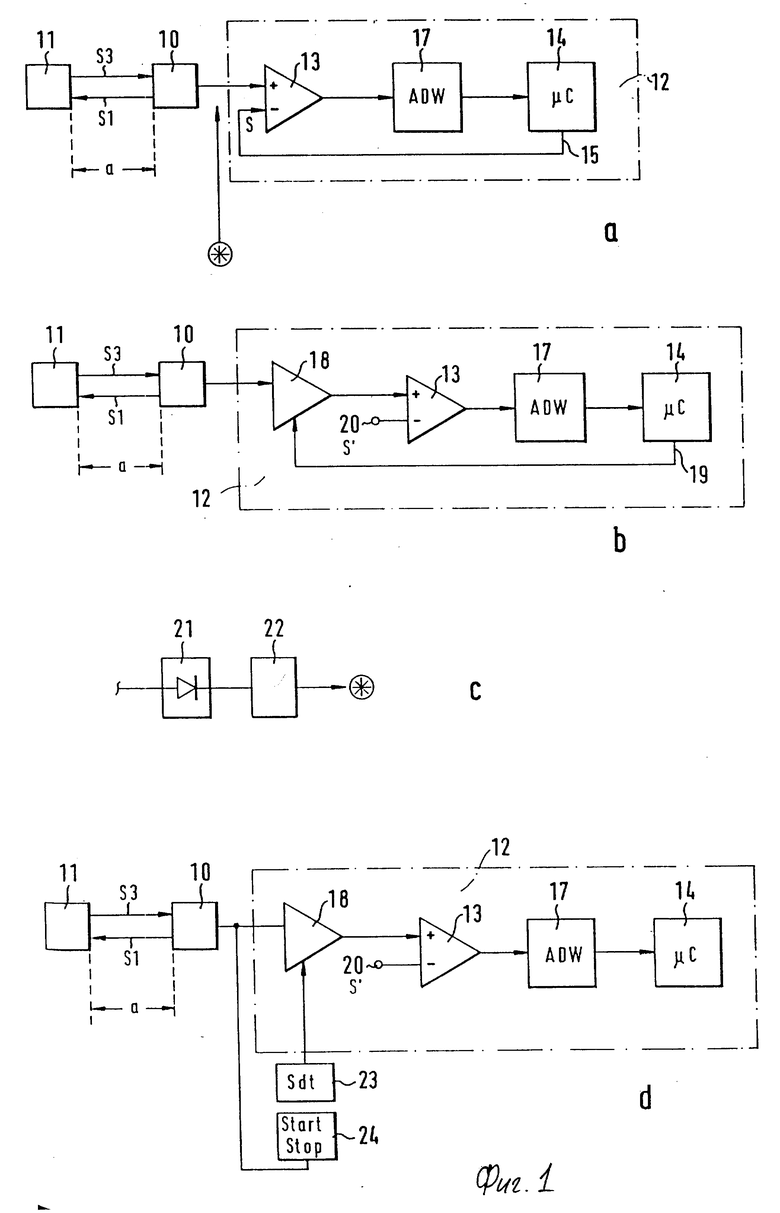
| US, патент, 4975889, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
