РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка основана и испрашивает приоритет предварительной заявки на изобретение № 61/547863, поданной в патентное ведомство США 17 октября 2011, а также приоритет Европейской патентной заявки 11185454.3, поданной 17 октября 2011, приоритет которых испрашивается настоящим и описание которых включено в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к технической области измерения уровня заполнения. В частности, настоящее изобретение относится к устройству измерения уровня заполнения для вычисления функциональной взаимосвязи между двумя треками для определения уровня заполнения, к способу вычисления такой функциональной взаимосвязи для определения уровня заполнения, элементу программы и читаемому компьютером носителю.
ТЕХНИЧЕСКИЕ ПРЕДПОСЫЛКИ
Настоящее изобретение относится к способу определения положения поверхности загруженного продукта при измерении уровней заполнения всех типов.
В датчиках уровня заполнения, работающих согласно FMCW (непрерывному излучению с частотной модуляцией) или способу на основе времени распространения импульса, электромагнитные или акустические волны излучаются в направлении поверхности загруженного продукта. Затем датчик записывает эхо-сигналы, отраженные от загруженного продукта, элементов конструкции резервуара и от самого резервуара, и выводит на их основании положение поверхности по меньшей мере одного из находящихся в резервуаре загруженных продуктов.
При применении акустических или оптических волн сигнал, сформированный устройством измерения уровня заполнения, распространяется в общем случае свободно в направлении измеряемой поверхности загруженного продукта. В приборах, которые для измерения поверхности загруженного продукта используют радиолокационные волны, учитывается как свободное распространение в направлении к измеряемой среде, так и распространение внутри волновода, который направляет радиолокационные волны от устройства измерения уровня заполнения к среде. В случае приборов, работающих по принципу направленных микроволн, высокочастотные сигналы направляются по волноводу к среде. На поверхности измеряемой среды или загруженного материала часть приходящего сигнала отражается и после соответствующего времени распространения вновь попадает в устройство измерения уровня заполнения, не отраженные составляющие сигнала проникают в среду и распространяются в ней в соответствии с физическими свойствами среды дальше в направлении дна резервуара. На дне резервуара и эти сигналы отражаются и после прохождения через среду и расположенную выше атмосферу вновь попадают в устройство измерения уровня заполнения.
Устройство измерения уровня заполнения принимает отраженные в различных местах сигналы и определяет на их основании расстояние до загруженного продукта.
Полученное расстояние до загруженного продукта предоставляется вовне. Предоставление может быть реализовано в аналоговой форме (4…20 мА интерфейс) или в цифровой форме (Feldbus - промышленная сеть).
Общим для всех способов является то, что применяемый для измерения сигнал на пути от устройства измерения уровня заполнения к поверхности загруженного продукта, как правило, находится в области влияния другой среды, которая далее обозначается покрывающей средой. Эта покрывающая среда находится между устройством измерения уровня заполнения и поверхностью измеряемой среды и в общем случае является жидкостью или газообразной атмосферой.
В преобладающем количестве случаев над измеряемой средой находится воздух. Так как распространение электромагнитных волн в воздухе лишь несущественно отличается от их распространения в вакууме, не требуется особой коррекции сигналов, которые отражаются от загруженного продукта, внутренних конструктивных элементов резервуара и самого резервуара через воздух назад к устройству измерения уровня заполнения.
Но в технологических резервуарах в химической промышленности в качестве покрывающей среды могут выступать различные типы химических газов и газовых смесей. В зависимости от физических свойств этих газов или газовых смесей, свойства распространения электромагнитных волн изменяются по сравнению с их распространением в вакууме или в воздухе.
Последующие варианты выполнения изобретения концентрируются на рассмотрении часто встречающегося случая применения единственной измеряемой среды или загруженного продукта в резервуаре. Представленные в последующем изложении взаимосвязи справедливы и для случая применения двух различных сред или загруженных продуктов в одном резервуаре. Положение поверхности загруженного продукта в связи с измерением разделяющего слоя может быть, в частности, также положением разделяющего слоя между двумя различными средами или загруженными продуктами, которое идентично положению поверхности загруженного продукта нижнего из обоих загруженных продуктов или сред в резервуаре для измерения разделяющего слоя.
Известны способы, при которых для определения уровня заполнения необходима точная классификация измеряемых эхо-сигналов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является обеспечить возможность альтернативного определения уровня заполнения.
В соответствии с первым аспектом настоящего изобретения предложено устройство измерения уровня заполнения, которое имеет блок регистрации кривых эхо-сигналов для регистрации нескольких, следующих друг за другом по времени кривых эхо-сигналов. Кроме того, устройство измерения уровня заполнения имеет блок оценки, который в каждой из зарегистрированных кривых эхо-сигналов может определить, соответственно, первый эхо-сигнал и (по меньшей мере) второй эхо-сигнал, оценивая кривые эхо-сигналов.
Первый эхо-сигнал при этом ассоциируется с любым первым треком, а второй эхо-сигнал - с любым вторым треком кривых эхо-сигналов. Понятием «трек» в данной заявке обозначается последовательность значений позиций, которые вычисляются на основании позиций соответствующих эхо-сигналов. Кроме того, блок оценки выполнен с возможностью вычисления функциональной взаимосвязи между позициями первого трека и позициями второго трека кривых эхо-сигналов.
Блок регистрации кривых эхо-сигналов служит, кроме того, для регистрации другой, следующей по времени кривой эхо-сигнала, после чего блок оценки определяет позицию первого эхо-сигнала другой кривой эхо-сигнала путем оценки другой кривой эхо-сигнала, причем первый эхо-сигнал ассоциирован с первым треком. Кроме того, блок оценки выполнен с возможностью последующего вычисления позиции второго трека к моменту времени, в который была записана дополнительная кривая эхо-сигнала, с применением позиции первого эхо-сигнала дополнительной кривой эхо-сигнала или позиции первого трека к моменту времени, в который была записана дополнительная кривая эхо-сигнала, а также первой функциональной взаимосвязи.
При этом следует учитывать, что трек не должен быть непосредственно составной частью кривой эхо-сигнала. Трек может также оцениваться в пределах отдельной функции и продолжаться. Формулировка, что трек принадлежит кривой эхо-сигнала, означает, что трек и кривая эхо-сигнала являются согласованными друг с другом. Это может означать, что эхо-сигнал, который был локализован на кривой эхо-сигнала, уже был ассоциирован с треком. Кроме того, это может означать, что если эхо-сигнал не может быть ассоциирован с кривой эхо-сигнала, позиция трека все же была актуализирована.
Актуализация различается в зависимости от используемого способа. Если эхо-сигнал другой кривой эхо-сигнала не ассоциируется с треком, то позиция трека первой кривой эхо-сигнала может применяться как новая позиция трека другой кривой эхо-сигнала. Кроме того, позиция трека другой кривой эхо-сигнала может вычисляться из предшествующей характеристики трека и временного интервала между первой и другой кривой эхо-сигнала. Кроме того, может быть, что трек, если с ним не ассоциирован эхо-сигнал другой кривой эхо-сигнала, принимает временную метку другой кривой эхо-сигнала (это может быть моментом выборки кривой эхо-сигнала). Также этот трек может обозначаться как трек другой кривой эхо-сигнала.
Иными словами, таким образом, соответствующие два трека могут сравниваться друг с другом, так что может вычисляться функциональная взаимосвязь между отдельными позициями одного трека и соответствующими позициями другого трека. Эта функциональная взаимосвязь между позициями обоих треков затем применяется, чтобы определить позицию второго трека из позиции первого трека.
Таким образом, определяется функциональная взаимосвязь между соответствующими двумя треками. При этом позиция одного трека к определенному моменту времени может быть идентичной с соответствующей позицией принадлежащего этому треку, например, последнего добавленного эхо-сигнала. Однако это только один вариант выполнения используемого алгоритма отслеживания (Tracking - Трекинг). Имеются другие способы, которые вычисляют положение трека, например, из взвешенного среднего нескольких отражений или из среднего между прогнозированием и измерениями (отслеживание посредством фильтра Калмана). В данном случае позиция последнего записанного эхо-сигнала не точно соответствует текущей позиции трека.
В случае позиции определенного на новой кривой эхо-сигнала первого эхо-сигнала речь может идти о позиции первого трека к этому моменту времени. В любом случае позиция первого трека может определяться не только на основе другой кривой эхо-сигнала (то есть вновь определенного первого эхо-сигнала), но и дополнительно с помощью других информационных данных, например путем применения фильтра.
Устройство измерения уровня заполнения работает согласно способу, основанному на времени распространения, в частности по способу FMCW (непрерывного излучения с частотной модуляцией) или способу на основе времени распространения импульса.
Передающий блок устройства измерения уровня заполнения посылает передаваемый сигнал, например, в форме передаваемого импульса или частотно-модулированной волны в направлении поверхности загруженного продукта. Этот передаваемый сигнал отражается от различных отражателей (в данном случае, например, от поверхности загруженного продукта, дна резервуара и стационарных дефектов в резервуаре), и отраженный переданный сигнал регистрируется блоком регистрации кривых эхо-сигналов в форме кривой эхо-сигналов, на которой может быть несколько отдельных эхо-сигналов (эхо-сигнал от поверхности загруженного продукта, эхо-сигнал от дна и один или несколько эхо-сигналов от дефектов, …).
Блок оценки устройства измерения уровня заполнения в данном случае может выполнять способ отслеживания (Tracking - Трекинг), который соответственно эхо-сигналы следующих по времени друг за другом кривых эхо-сигналов соотносит с определенной группой и представляет временную характеристику изменения позиций этих эхо-сигналов в форме трека.
Два любых трека (например, трек эхо-сигналов от дна резервуара и трек эхо-сигналов от поверхности загруженного продукта) могут быть функционально взаимосвязаны друг с другом, при этом временная характеристика изменения трека аппроксимируется математически описанной кривой и характеристика изменения другого трека также аппроксимируется математически описанной кривой. Эти оба математических описания или соответственно функции могут математически сравниваться друг с другом, в результате чего получается функциональная взаимосвязь между обоими треками. При этом речь идет о математической функции, которая представляет собой аппроксимацию. В простейшем случае речь идет об уравнении прямой. Но также речь может идти о более сложной функции в зависимости от того, как выглядят математические описания первого трека и второго трека.
Если регистрируется другая кривая эхо-сигнала, то может вычисляться ожидаемая позиция другого трека к моменту времени, в который была зарегистрирована другая кривая эхо-сигнала, при этом применяется функциональная взаимосвязь и позиция другого трека к этому моменту времени или соответственно позиция эхо-сигналов, относящихся к этому треку, к этому моменту времени.
Согласно другому аспекту изобретения функциональная взаимосвязь представляет собой линейную функциональную взаимосвязь, которая вычисляется из отдельных позиций трека.
Согласно другому аспекту изобретения блок оценки дополнительно выполнен так, чтобы определять позицию соответствующего третьего эхо-сигнала в каждой из зарегистрированных кривых эхо-сигналов путем оценки кривых эхо-сигналов, причем третьи эхо-сигналы ассоциируются с любым третьим треком. Затем может осуществляться вычисление второй функциональной взаимосвязи между позициями второго трека и позициями третьего трека кривых эхо-сигналов. Затем определяется позиция третьего трека другой кривой эхо-сигнала путем оценки другой кривой эхо-сигнала, причем третий эхо-сигнал принадлежит третьему треку. Вслед за этим осуществляется вычисление позиции второго трека другой кривой эхо-сигнала с применением позиции третьего эхо-сигнала другой кривой эхо-сигнала или позиции третьего трека, а также второй функциональной взаимосвязи.
Согласно другому аспекту изобретения блок оценки выполнен с возможностью усреднения вычисленных позиций вторых эхо-сигналов другой кривой эхо-сигнала.
Согласно другому аспекту изобретения блок оценки выполнен с возможностью усреднения вычисленных позиций второго трека другой кривой эхо-сигнала.
Согласно другому аспекту изобретения может выполняться контроль достоверности вычисленных позиций второго эхо-сигнала другой кривой эхо-сигнала. Это может осуществляться согласно классификации соответствующих треков.
Согласно другому аспекту изобретения блок оценки дополнительно выполнен с возможностью вычисления позиции второго трека другой кривой эхо-сигнала с применением функциональной взаимосвязи между всеми N(N-1)/2 парами N треков кривых эхо-сигналов, причем N - положительное целое число.
Согласно другому аспекту изобретения блок оценки дополнительно выполнен с возможностью вычисления позиции второго трека другой кривой эхо-сигнала с применением только функциональной взаимосвязи между N-1 парами N треков кривых эхо-сигналов, причем N-положительное целое число.
Согласно другому аспекту изобретения первые эхо-сигналы представляют собой многократные эхо-сигналы, которые вызваны многократными отражениями.
Согласно другому аспекту изобретения первые эхо-сигналы представляют собой многократные эхо-сигналы от поверхности загруженного продукта, а вторые эхо-сигналы - однократные эхо-сигналы от поверхности загруженного продукта, то есть собственно эхо-сигналы уровня заполнения.
Многократный эхо-сигнал представляет собой эхо-сигнал, который вызван многократным отражением переданного сигнала в том же самом месте отражения (например, от поверхности загруженного продукта, поверхности раздела между двумя средами загруженного продукта, конструктивных элементов резервуара или дна резервуара). Эхо-сигнал от дна представляет собой эхо-сигнал, вызванный отражением переданного сигнала от дна резервуара с загруженным продуктом. Кроме того, многократный эхо-сигнал может представлять собой отраженный сигнал, который, прежде чем он был принят, по меньшей мере однократно был отражен от покрывающей поверхности.
Согласно другому аспекту изобретения предложен способ для определения уровня заполнения, при котором регистрируется несколько следующих во времени друг за другом кривых эхо-сигналов. Затем определяются, соответственно, первый эхо-сигнал и второй эхо-сигнал на каждой из зарегистрированных кривых эхо-сигналов путем оценки кривых эхо-сигналов, причем первые эхо-сигналы ассоциируются с любым первым треком и вторые эхо-сигналы ассоциируются с любым вторым треком кривых эхо-сигналов. Затем осуществляется вычисление первой функциональной взаимосвязи между позициями первого трека и позициями второго трека кривых эхо-сигналов. Кроме того, (перед или после) регистрируется другая, следующая по времени кривая эхо-сигнала, затем определяется позиция первого эхо-сигнала другой кривой эхо-сигнала путем оценки другой кривой эхо-сигнала, причем первый эхо-сигнал относится к первому треку. Затем следует вычисление позиции второго трека другой кривой эхо-сигнала с применением позиции первого эхо-сигнала другой кривой эхо-сигнала или позиции первого трека, а также первой функциональной взаимосвязи.
Согласно другому аспекту изобретения предложен элемент программы, который при выполнении на процессоре устройства измерения уровня заполнения предписывает устройству измерения уровня заполнения выполнять этапы способа, описанные выше и далее.
Согласно другому аспекту настоящего изобретения предложен читаемый компьютером носитель, на котором сохранен элемент программы, который, при выполнении на процессоре устройства измерения уровня заполнения, предписывает устройству измерения уровня заполнения выполнять этапы способа, описанные выше и далее.
Ниже описываются примеры осуществления изобретения со ссылкой на чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - радиолокационное устройство измерения уровня заполнения согласно примеру выполнения изобретения.
Фиг. 2 - кривые эхо-сигналов.
Фиг. 3 - блок-схема обработки сигналов согласно примеру выполнения изобретения.
Фиг. 4 - схематичное представление взаимосвязи позиций треков согласно примеру выполнения изобретения.
Фиг. 5 - характеристика двух треков.
Фиг. 6 - схематичное представление взаимосвязи позиций двух треков согласно примеру выполнения изобретения.
Фиг. 7 - способ сокращения комбинаторики при определении уровня заполнения согласно примеру выполнения изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Чертежи являются схематичными и приведены не в масштабе. Одинаковые ссылочные позиции, использующиеся на различных чертежах, относятся к одинаковым или подобным элементам. Однако одинаковые или подобные элементы могут быть обозначены различными ссылочными позициями.
При измерении уровня заполнения могут использоваться различные способы, согласно которым может быть определено положение поверхности загруженного продукта в резервуаре.
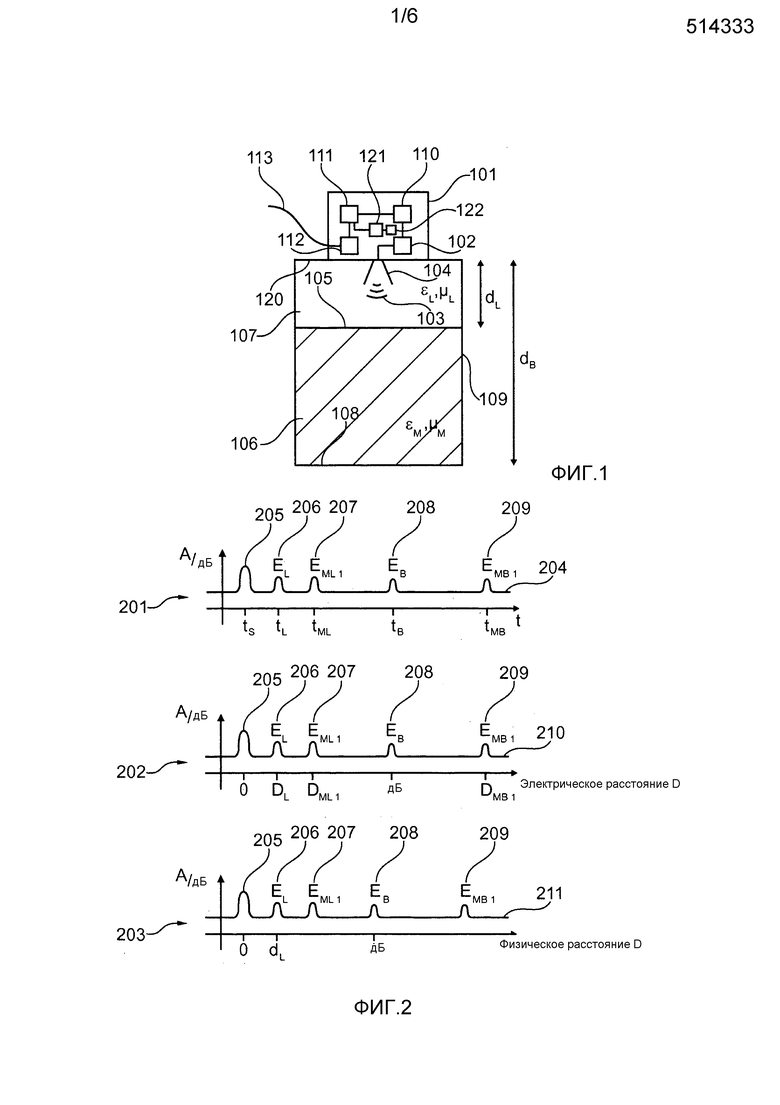
На фиг. 1 показано устройство для измерения уровня заполнения. Резервуар 109 заполнен жидкостью 106 до высоты заполнения dB-dL. Пространство 107 над жидкостью заполнено, например, воздухом. В данном примере жидкость покрыта воздухом в качестве покрывающей среды.
Устройство 101 измерения уровня заполнения вырабатывает с помощью высокочастотного блока 102 электромагнитный импульс 103 и подает его на соответствующую антенну 104, после чего этот импульс приближенно со скоростью света распространяется в направлении измеряемой поверхности 105 загруженного продукта. Точная скорость в пределах покрывающей среды выводится посредством:
Причем с0 обозначает скорость света в вакууме, εL - диэлектрическую проницаемость покрывающей среды и µL - магнитную проницаемость покрывающей среды.
Поверхность 105 загруженного продукта отражает часть получаемой энергии сигнала, после чего отраженная составляющая сигнала распространяется назад к устройству 101 измерения уровня заполнения. Неотраженная составляющая сигнала проникает в жидкость 106 и распространяется в ней с сильно сниженной скоростью в направлении дна резервуара. Скорость сМ электромагнитной волны 103 внутри жидкости 106 определяется свойствами материала жидкости 106:
Причем с0 обозначает скорость света в вакууме, εM - диэлектрическую проницаемость жидкости и µM - магнитную проницаемость жидкости.
На дне 108 резервуара 109 оставшаяся составляющая сигнала также отражается и спустя соответствующее время распространения вновь достигает устройства 101 измерения уровня заполнения. В устройстве измерения уровня заполнения поступающие сигналы с помощью высокочастотного блока 102 предварительно обрабатываются и, например, преобразуются в более низкочастотный диапазон промежуточных частот. С помощью аналого-цифрового преобразователя 110 аналоговые кривые эхо-сигналов, которые были предоставлены высокочастотным блоком 102, оцифровываются и предоставляются в блок 111 оценки.
Вышеуказанные компоненты, которые используются для предоставления оцифрованной кривой эхо-сигнала, а именно, в частности, высокочастотный блок 102 и аналого-цифровой преобразователь 110, могут, например, определять устройство регистрации кривых эхо-сигналов.
Блок 111 оценки анализирует оцифрованную кривую эхо-сигнала и определяет на основе содержащихся в ней эхо-сигналов, согласно известному способу, тот эхо-сигнал, который сформирован отражением от поверхности 105 загруженного продукта. К тому же, блок 111 оценки, который в данном примере может служить в качестве блока измерения, определяет точное электрическое расстояние до этого эхо-сигнала. Кроме того, определенное электрическое расстояние до эхо-сигнала может корректироваться таким образом, чтобы компенсировать воздействия покрывающей среды 107 на распространение электромагнитных волн. Вычисленное таким образом скомпенсированное расстояние до загруженного продукта передается в блок 112 вывода, который в соответствии с заданиями пользователя дополнительно обрабатывает определенное значение, например, посредством линеаризации, коррекции смещения, пересчета на высоту заполнения dB-dL. Обработанное измеренное значение предоставляется на внешний коммуникационный интерфейс 113. При этом могут применяться все обычные интерфейсы, такие как 4..29 мА токовые интерфейсы, стандарты промышленных сетей, такие как HART, Profibus, FF, или компьютерные интерфейсы, такие как RS232, RS485, USB, Ethernet или FireWire.
Процессор 121 управляет блоком 111 оценки и может сам быть частью блока оценки. Кроме того, предусмотрен элемент памяти (читаемый компьютером носитель 122), на котором сохранен элемент программы для управления процессором.
На фиг. 2 еще раз наглядно показаны важные этапы, которые применяются в рамках обработки эхо-сигналов в блоке 111 оценки для компенсации влияния различных сред.
На участке кривой 201 сначала показана кривая 204 эхо-сигнала, зарегистрированная на протяжении периода времени аналого-цифровым преобразователем 110. Кривая эхо-сигнала содержит прежде всего отраженную в пределах антенны составляющую переданного импульса 205. Спустя короткое время к моменту времени tL регистрируется первый эхо-сигнал, который вызван отражением составляющих сигнала от граничной поверхности 105 или поверхности 105 среды 106 в резервуаре. Другой эхо-сигнал 207 возникает как первый многократный эхо-сигнал 206 от загруженного продукта и регистрируется к моменту времени tML. Составляющие сигнала, проникающие в среду 106, отражаются после прохождения через загруженный продукт 106 от дна 108 резервуара и формируют дополнительный эхо-сигнал 208 в пределах кривой 204 эхо-сигнала. Этот эхо-сигнал 208 от дна регистрируется в момент времени tB. Кроме того, к моменту времени tMB может регистрироваться многократный эхо-сигнал 209 от дна.
На первом этапе обработки зависимая от времени кривая 201 преобразуется в зависимую от расстояния кривую 202. Во время этого преобразования исходят из того, что зарегистрированная кривая образована исключительно посредством распространения в вакууме. Ордината представления 201 пересчитывается посредством перемножения на скорость света в вакууме, на ось расстояния. К тому же, посредством пересчета смещения достигается то, что вызванный антенной эхо-сигнал 205 получает значение расстояния 0 м. Кроме того, значения расстояния умножаются на коэффициент 0,5, чтобы исключить двойной путь к поверхности загруженного продукта и обратно.
На втором представлении 202 показана кривая эхо-сигнала как функция электрического расстояния D. Электрическое расстояние соответствует половине расстояния, которое проходит электромагнитная волна в вакууме за определенное время. Электрическое расстояние не учитывает влияний среды, которые могут привести к замедлению распространения электромагнитных волн. Участок кривой 202 представляет собой нескомпенсированную, но связанную с местоположением кривую эхо-сигнала.
В настоящем описании электрические расстояния обозначены прописными буквами D, в то время как физические расстояния, которые непосредственно могут измеряться в резервуаре, обозначаются строчными буквами d.
Кроме того, возможно полностью компенсировать кривую 210 эхо-сигнала. На третьем представлении 203 показана полностью скомпенсированная кривая 211 эхо-сигнала. Чтобы получить представление эхо-сигнала по физическому расстоянию, в данном случае должно учитываться влияние покрывающей среды 107 в области между точками 0 и DL (участок кривой 202). Электрические данные расстояния по абсциссе должны между 0 и DL пересчитываться в физические данные расстояния согласно следующему соотношению:
Так как εLuft и µLuft при достаточной аппроксимации соответствуют значению 1, для этого участка в данном примере не должна осуществляется корректировка. Электрические данные расстояния по абсциссе больше или равные DL должны, однако, пересчитываться в физические данные расстояния согласно следующему соотношению:
На третьем представлении 203 показана, наконец, скорректированная характеристика. Как расстояние до эхо-сигнала 206 от поверхности 105 загруженного продукта, так и расстояние до эхо-сигнала 208, сформированного от дна 108 резервуара, совпадают с расстояниями, измеряемыми на резервуаре 109. Расстояние до многократного эхо-сигнала 207 от поверхности загруженного продукта не может непосредственно измеряться на резервуаре, так как вышеописанная компенсация справедлива только для непосредственных отражений. То же самое справедливо для многократного эхо-сигнала 209 отражения от дна 108 резервуара.
В данном случае следует сослаться на то, что преобразование на участке кривой 202, то есть определение электрических расстояний или позиции различных эхо-сигналов, в рамках обработки сигнала в устройстве измерения уровня заполнения выполняется, например, для всех эхо-сигналов. Преобразование кривой эхо-сигнала в скомпенсированную кривую эхо-сигнала в общем случае не выполняется, однако достаточна коррекция отдельного значения расстояния или позиции эхо-сигнала.
Проблемы в вышеописанном устройстве измерения уровня заполнения могут возникнуть в том отношении, что принимаются не только отраженные составляющие сигнала от поверхности загруженного продукта, но и возникают нежелательные отражения, которые возникают в результате так называемых дефектов в резервуаре. Дефект в резервуаре может, например, вызываться конструктивными элементами или самой геометрией резервуара. Наряду с дефектами на полезный сигнал могут, к тому же, накладываться так называемые многократные отражения таким образом, что как идентификация полезных сигналов от поверхности загруженного продукта, так и точное измерение полезных сигналов сильно ухудшаются.
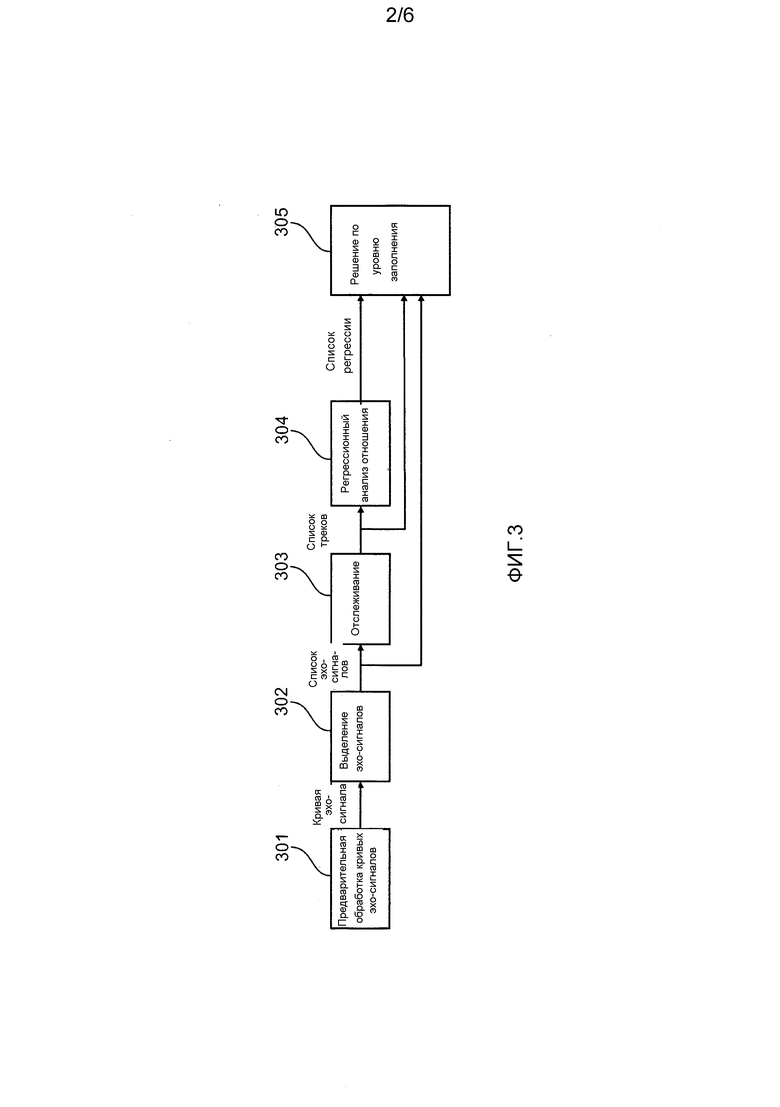
Возможный вариант выполнения устройства 111 оценки устройства измерения уровня заполнения детально представлен на блок-схеме на фиг. 3. Кривая эхо-сигнала может сначала подвергаться предварительной обработке 301. Посредством целенаправленной цифровой обработки сигналов, например посредством цифровой фильтрации с помощью способа выделения 302 эхо-сигнала, можно более простым образом определять значимые составляющие сигнала на кривой эхо-сигнала.
Выделенные эхо-сигналы могут сохраняться для дальнейшей обработки, например, в форме списка. Однако также возможны и другие варианты доступа к данным, чем сохранение в списке. Функциональный блок «слежение» 303 (Tracking - Трекинг) ассоциирует эхо-сигнал кривой эхо-сигнала к моменту времени ti с эхо-сигналом последующей кривой эхо-сигнала к моменту времени ti+1, причем эхо-сигналы прошли те же физические места отражения и те же отрезки пути.
Способы слежения (Tracking - Трекинга) уже известны в уровне техники и специалисту. Более подробная информация раскрывается, например, в WO 2009/037000 А2. Способ согласно примеру выполнения изобретения на блок-схеме обозначен названием «регрессионный анализ отношения» 304. Ключевой аспект изобретения заключается в том, чтобы позиции двух треков, то есть позиции двух различных физических мест отражения или двух отражений, которые прошли различные отрезки пути, соотнести друг с другом и на этом основании получить параметры линейной взаимосвязи. Каждый трек состоит из последовательности значений, которые определяются из эхо-сигналов кривой эхо-сигнала. Так как в устройствах измерения уровня заполнения должно измеряться расстояние до загруженного продукта, наряду с понятием «положение» также применяется понятие «расстояние».
В примере выполнения согласно фиг. 3 списки эхо-сигналов, треков и регрессии передаются на функциональный блок «решение по уровню заполнения» (305). Этот функциональный блок определяет, в числе прочего, тот эхо-сигнал, который возникает из-за непосредственного отражения от поверхности загруженного продукта и классифицирует его как эхо-сигнал уровня заполнения.
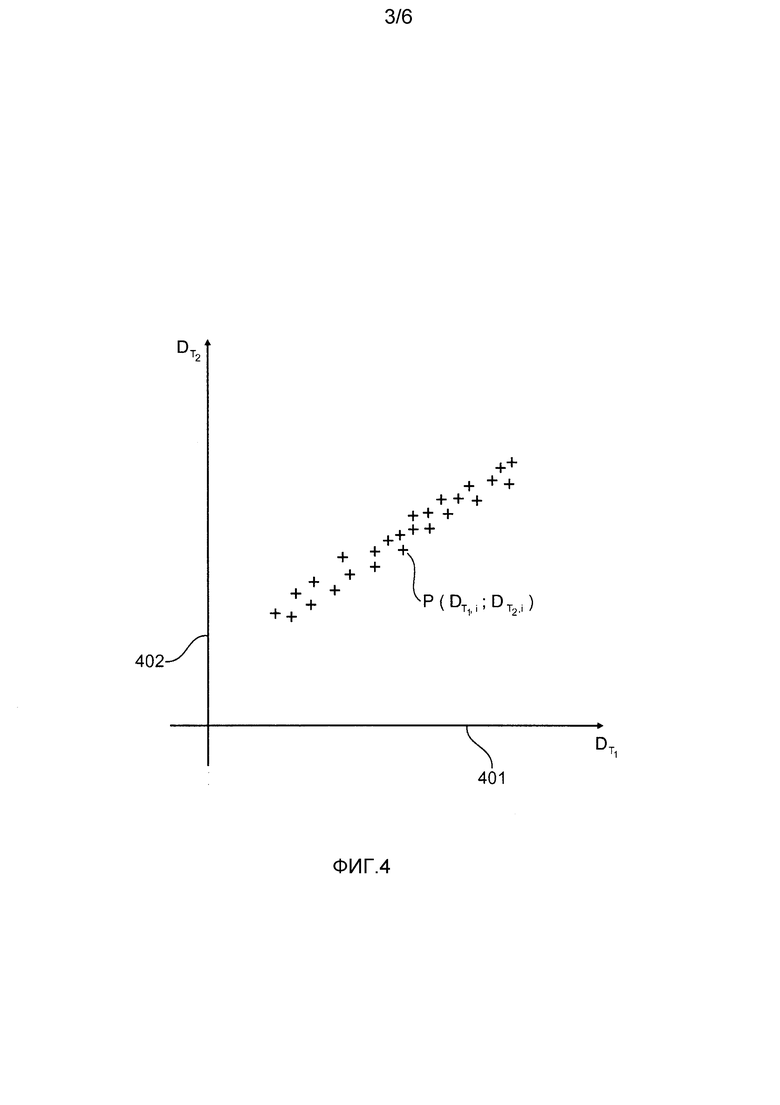
На фиг. 4 более детально пояснена ситуация соотношения между двумя треками. В системе координат показано облако точек, которое формируется из пар расстояний отдельных значений позиций двух треков. Например, треки обозначены как трек Т1 и трек T2. Тем не менее, любые другие возможные комбинации могут быть использованы для двух разных треков.
Каждая пара расстояний отмечена крестом. Ось абсцисс (х-ось 401) отображает расстояние D трека T1, ось ординат (y-ось 402) отображает расстояние D трека T2. Это расположение не является обязательным. Так, ось абсцисс и ось ординат могут также быть взаимозаменяемыми. Также единица измерения масштабирования оси не существенна для настоящего изобретения. Так, электрическое расстояние D взято в данном случае лишь для примера. Возможно также временное масштабирование позиции в соответствии с кривой 204 эхо-сигнала. Пара расстояний на фиг. 4 отдельно обозначена для большей точности. Пара расстояний 
С помощью показанной на фиг. 4 взаимосвязи позиций обоих треков поясняется, что позиции трека Т1 и трека Т2 могут быть соотнесены. Это означает, что трек Т1 и трек Т2 находятся в функциональной взаимосвязи. Уравнение прямой, которое описывает облако точек, служит для этого в качестве основы. Математически эта взаимосвязь описывается следующим образом:



а0 и а1 - параметры прямой, которые описывают линейную взаимосвязь между позицией трека Т1 и трека Т2;
ek - ошибка взаимосвязи для измерения в момент времени k.
Параметр а1 функции является безразмерным, в то время как а0 имеет ту же единицу измерения, что и 


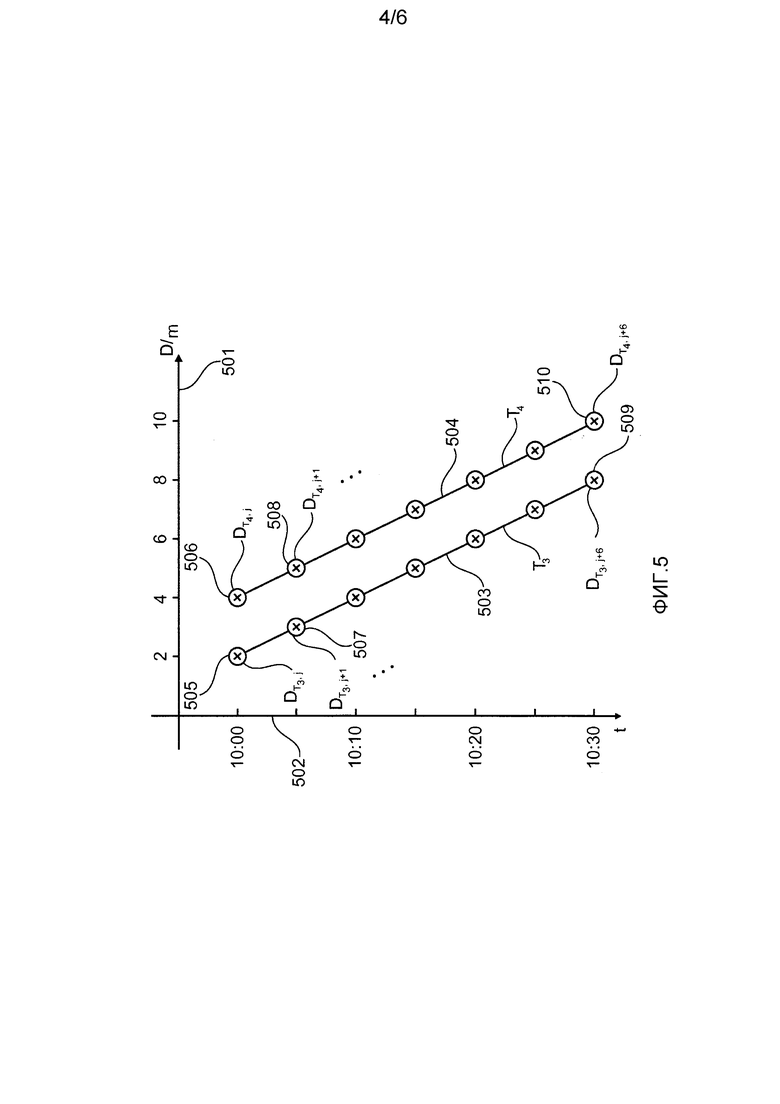
На фиг. 5 показан пример характеристики двух треков (Т3 503 и Т4 504) за период времени. х-ось 501 обозначает расстояние в метрах, а y-ось 502 обозначает время измерения t. Опорные точки 505, 507, 509, … и 506, 508, 510, … треков 503, 504, которые получаются из позиций эхо-сигналов кривых эхо-сигналов в соответствующий момент j времени, отмечены «х».
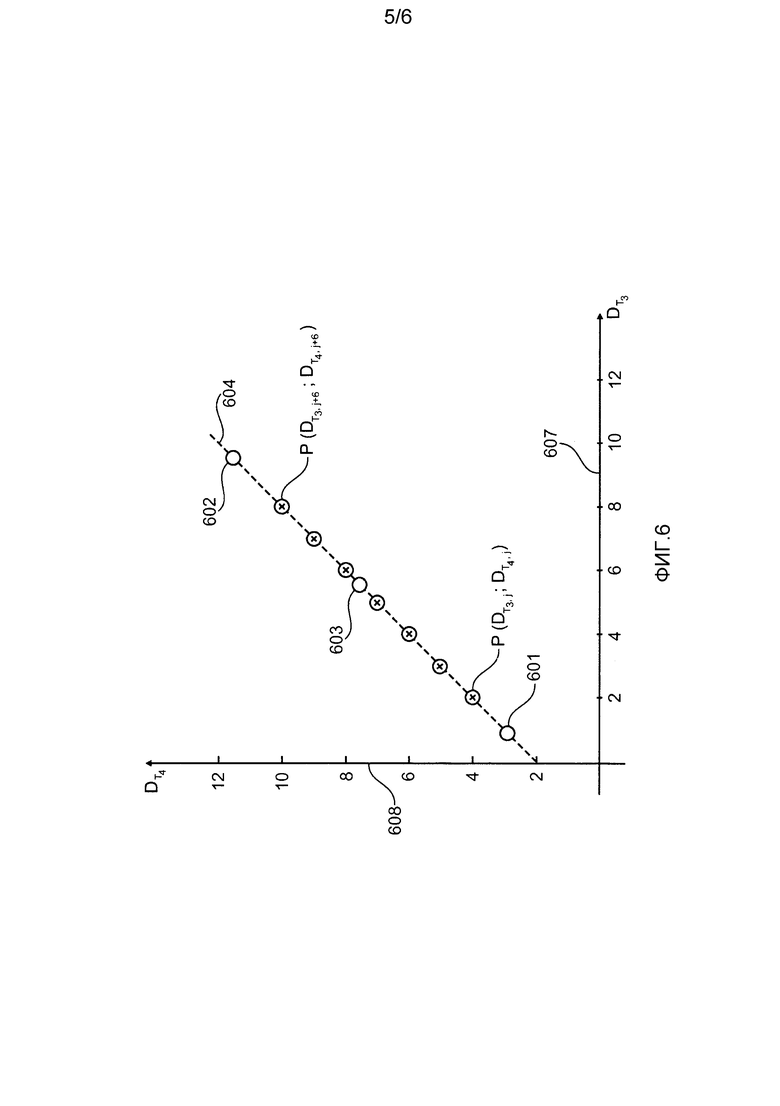
Если перенести опорные точки с фиг. 5 на диаграмму, на которой, как и на фиг. 4, показано соотношение между обоими треками, то получим диаграмму, показанную на фиг. 6. На х-оси 607 на данном чертеже отображены позиции трека Т3, на y-оси 608 в данном случае отображены позиции трека Т4. Кроме того, линейная взаимосвязь 604 между обоими треками показана в виде пунктирной линии. В данном случае показано, что в дополнение к опорным точкам на фиг. 6, также могут быть получены дальнейшие выводы о взаимосвязи между двумя треками. Как для позиций 603, которые находятся между опорными точками, так и для позиций 602 и 601, которые находятся рядом с опорными точками, может применяться взаимосвязь. Это также означает, что, когда позиция одного трека известна, может быть выведена позиция другого трека. Этот вывод является обратимым. В примере согласно фиг. 6 это означает, что позиция трека Т4 может быть выведена из позиции трека Т3, и наоборот. Кроме того, не только может быть сделан вывод, но также оценка позиции трека может быть представлена, если определение позиции трека в связи с неблагоприятными соотношениями сигналов не было бы возможным.
Определение параметров а0 и а1
Параметры а0 и а1 могут самостоятельно определяться функциональным блоком «регрессионный анализ отношения» 304. В связи с ошибкой в базовой модели предпочтительна так называемая оценка параметров, чтобы минимизировать ошибку определения параметров. Сама оценка может быть произведена различными способами. Возможно применение общих способов оценки параметров, таких как оценка методом наименьших квадратов. Оценка методом наименьших квадратов подробно описана в литературе, например, в источниках: Kiencke, Eger “Messtechnik - Systemtheorie für Elektrotechniker”, ISBN 3-540-24310-0, или Bronstein, Semendjajew, Musiol, Mühling, “Taschenbuch der Mathematik”, ISBN 3-8171-2006-0 («Измерительная техника: теория систем для электротехников»). Также возможно определение компенсационных или регрессионных прямых согласно Lothar Popula “Mathematik für Ingenieure und Wissenschaftler Band 3”, ISBN 3-528-24937-4 («Математика для инженеров и ученых, том 3»). Оценка может быть выполнена, например, следующим образом:




Для того чтобы пары позиций сохранять в памяти не постоянно, эти способы могут быть реализованы рекурсивно. Оценка может быть сначала подверженной ошибкам, но улучшается с увеличением числа пар значений. Конечно, необходимо сначала определить параметры, прежде чем может быть получен вывод текущей позиции трека на основе позиции другого трека.
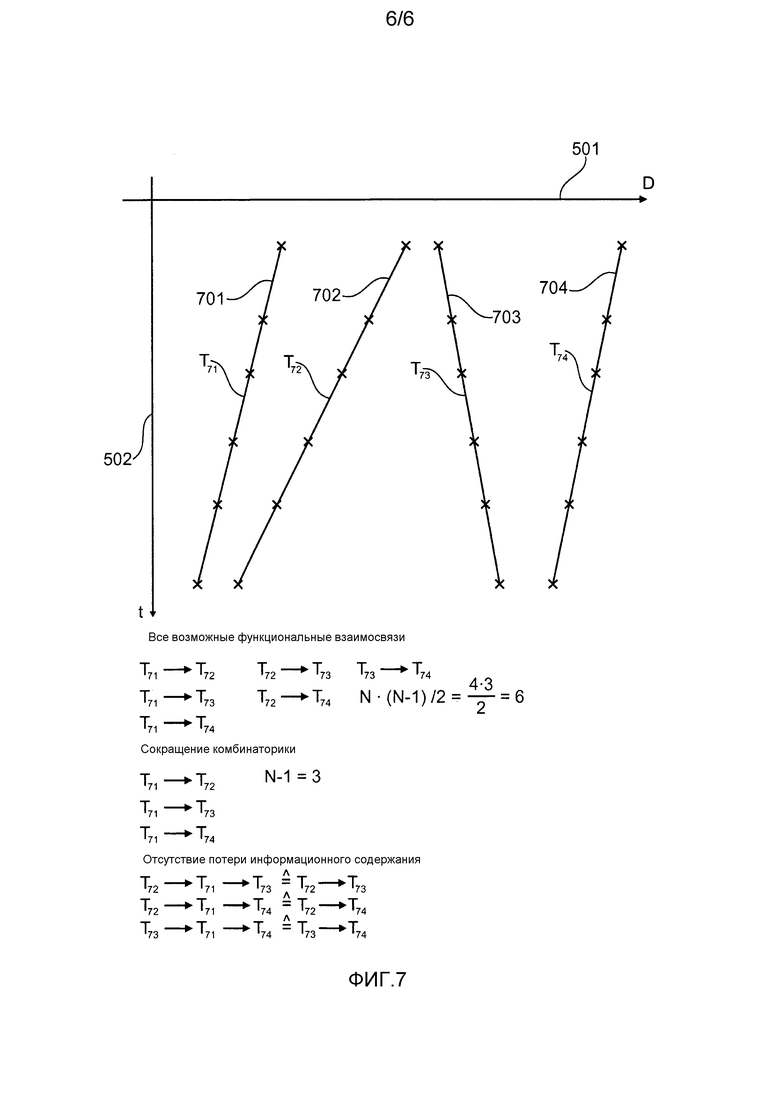
Описанное изобретение может быть предпочтительно модифицировано. На кривой эхо-сигнала часто показано большое количество эхо-сигналов, что влечет за собой множество треков. В описанном способе в общем случае все треки соотносят между собой. Это означает, что из каждого отдельного трека непосредственно можно вывести местоположение каждого другого трека. Число А устанавливаемых функциональных взаимосвязей может быть вычислено в зависимости от числа N треков по формуле
A=N·(N-1)/2.
При четырех отслеживаемых треках затем необходимо создать, вычислить, поддерживать и сохранить шесть взаимосвязей. Расширение изобретения обеспечивается за счет целевого сокращения комбинаторики. На фиг. 7 показано полное перечисление в случае четырех различных треков. Функциональные взаимосвязи показаны стрелкой. Направление стрелки является лишь примерным, так как взаимосвязь также является обратимой. Если, например, известна взаимосвязь Т71→T72, то также может быть вычислена взаимосвязь Т72→T71 путем формирования обратной функции. Кроме того, на фиг. 7 показана возможность сокращения комбинаторики без снижения информационного содержания изобретения. К примеру, сокращение выполнялось на основе трека T71. Взаимосвязи между Т72 и T73, Т72 и T74 или Т73 и T74 могут быть вычислены из взаимосвязей между Т71 и T72, Т71 и T73 или Т71 и T74. Тогда необходимо только сохранение и расширение
А=N-1
(на фиг. 7 тогда три) функциональных взаимосвязей. Сокращение предусматривает, что нужно выбрать один трек в качестве отправной точки сокращения. Этот трек можно также обозначить как промежуточный трек. В примере согласно фиг. 7 это трек Т71. Разумеется, мог быть также выбран и другой трек в качестве промежуточного трека. То, что информационное содержание не теряется, показано с помощью цепочки вычислений согласно фиг. 7. Например, взаимосвязь между Т72→T73 можно определить из обеих взаимосвязей Т71→T72 и Т71→T73. Для этого должна быть образована обратная функция Т71←T72 из Т71→T72. Затем может быть создана расширенная взаимосвязь Т72→T71→T73, и местоположение трека Т73 может быть определено из трека T72, причем не требуется перед этим оценивать параметры функционального выражения для взаимосвязи Т72→T73. В данном случае преимущества заключается в быстродействии, так как оценка параметров требует большого объема вычислений. К тому же, экономится объем памяти.
Ключевым аспектом расширения является, таким образом, то, что комбинаторика может быть сокращена, если при вычислении позиции трека ТА из позиции трека ТВ всегда производится вычисление через промежуточный трек ТС.
Ключевой аспект описанного способа заключается в оценке параметра целевой функции, которая затем описывает взаимосвязь позиции между двумя треками. Если параметры целевой функции во время работы устройства измерения уровня заполнения были достаточно хорошо определены, то из позиции одного трека можно вывести позицию другого трека. Так как параметры зависят от места измерения (места встраивания, штуцера, фланца, дна резервуара, крышки резервуара, заполняемого продукта, элементов конструкции в резервуаре), параметризация не может осуществляться на заводе.
Дополнительно следует отметить, что термины «включает в себя» и «имеет» не исключают и других элементов и этапов и единственное число означает также множественное число. Кроме того, следует отметить, что признаки или этапы, которые описаны выше со ссылками на приведенные выше примеры выполнения, могут быть применены в комбинации с другими признаками или этапами других вышеописанных примеров выполнения. Ссылочные позиции в пунктах формулы изобретения не следует рассматривать в качестве ограничения.
Изобретение относится к технической области измерения уровня заполнения. В частности, настоящее изобретение относится к устройству измерения уровня заполнения, к способу определения и читаемому компьютером носителю. Так, способ определения уровня заполнения содержит этапы, при которых: регистрируют несколько следующих во времени друг за другом кривых эхо-сигналов; определяют соответственно первый эхо-сигнал и второй эхо-сигнал в каждой из зарегистрированных кривых эхо-сигналов путем оценки кривых эхо-сигналов, причем первые эхо-сигналы ассоциируются с любым первым треком и вторые эхо-сигналы ассоциируются с любым вторым треком; вычисляют первую функциональную взаимосвязь между позициями первого трека и позициями второго трека кривых эхо-сигналов; регистрируют другую кривую эхо-сигнала; определяют позицию первого эхо-сигнала другой кривой эхо-сигнала путем оценки другой кривой эхо-сигнала, причем первый эхо-сигнал принадлежит первому треку; вычисляют позицию второго трека к моменту времени другой кривой эхо-сигнала с применением позиции первого эхо-сигнала другой кривой эхо-сигнала или позиции первого трека к моменту времени другой кривой эхо-сигнала и первой функциональной взаимосвязи. Задачей изобретения является обеспечить возможность альтернативного определения уровня заполнения. 3 н. и 8 з.п. ф-лы, 7 ил.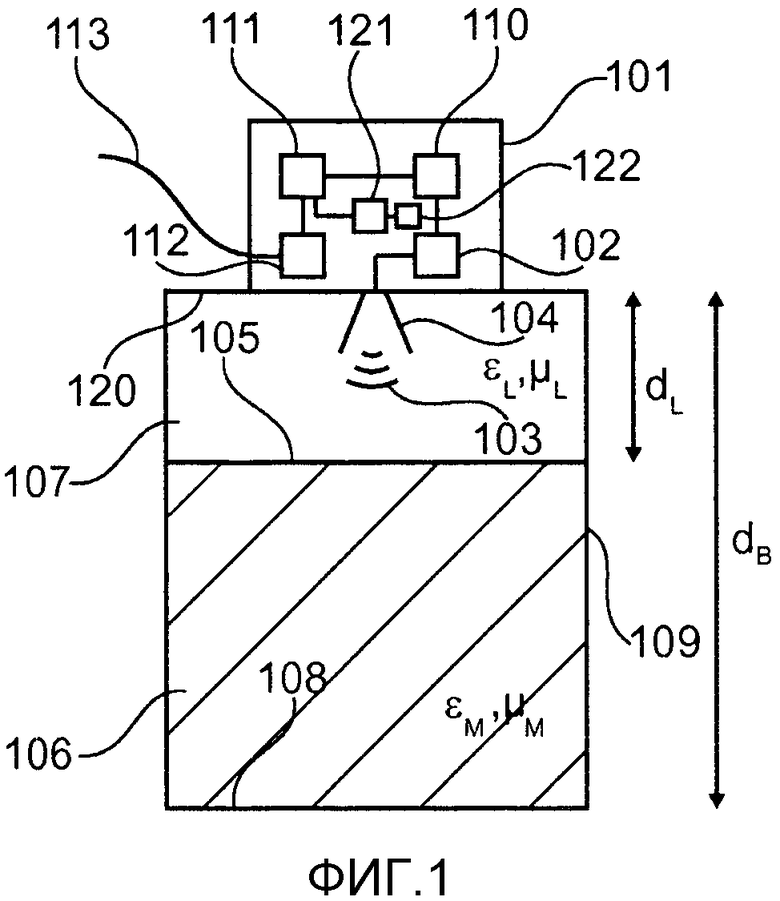
1. Устройство (101) измерения уровня заполнения, содержащее:
блок (104, 102, 110) регистрации кривых эхо-сигналов для регистрации нескольких, следующих друг за другом по времени кривых эхо-сигналов;
блок (111) оценки, выполненный с возможностью:
определения в каждой из зарегистрированных кривых эхо-сигналов, соответственно, первого эхо-сигнала и второго эхо-сигнала посредством оценивания кривых эхо-сигналов, причем первые эхо-сигналы ассоциируются с любым первым треком, а вторые эхо-сигналы - с любым вторым треком;
вычисления функциональной взаимосвязи между позициями первого трека и позициями второго трека кривых эхо-сигналов;
причем блок (104, 102, 110) регистрации кривых эхо-сигналов выполнен с возможностью регистрации другой кривой эхо-сигнала;
причем блок (111) оценки дополнительно выполнен с возможностью:
определения позиции первого эхо-сигнала другой кривой эхо-сигнала путем оценки другой кривой эхо-сигнала, причем первый эхо-сигнал принадлежит первому треку;
вычисления позиции второго трека к моменту времени другой кривой эхо-сигнала с применением позиции первого эхо-сигнала другой кривой эхо-сигнала или позиции первого трека к моменту времени другой кривой эхо-сигнала и первой функциональной взаимосвязи.
2. Устройство измерения уровня заполнения по п. 1,
причем функциональная взаимосвязь представляет собой линейную взаимосвязь.
3. Устройство измерения уровня заполнения по любому из пп. 1, 2, причем блок (111) оценки дополнительно выполнен с возможностью:
определения позиций соответствующего третьего эхо-сигнала в каждой из зарегистрированных кривых эхо-сигналов путем оценки кривых эхо-сигналов, причем третьи эхо-сигналы ассоциируются с любым третьим треком;
вычисления второй функциональной взаимосвязи между позициями второго трека и позициями третьего трека кривой эхо-сигнала;
определения позиции третьего трека другой кривой эхо-сигнала путем оценки другой кривой эхо-сигнала, причем третий эхо-сигнал принадлежит третьему треку;
вычисления позиции второго трека к моменту времени другой кривой эхо-сигнала с применением позиции третьего эхо-сигнала другой кривой эхо-сигнала или позиции третьего трека к моменту времени другой кривой эхо-сигнала и второй функциональной взаимосвязи.
4. Устройство измерения уровня заполнения по п. 3, причем блок (111) оценки дополнительно выполнен с возможностью:
усреднения вычисленных позиций второго трека к моменту времени другой кривой эхо-сигнала.
5. Устройство измерения уровня заполнения по п. 1, причем блок (111) оценки дополнительно выполнен с возможностью:
выполнения контроля достоверности вычисленной позиции второго трека к моменту времени другой кривой эхо-сигнала.
6. Устройство измерения уровня заполнения по п. 1, причем блок (111) оценки дополнительно выполнен с возможностью:
вычисления позиции второго трека к моменту времени другой кривой эхо-сигнала с применением функциональной взаимосвязи между всеми N(N-1)/2 парами N треков кривых эхо-сигналов, причем N - положительное целое число.
7. Устройство измерения уровня заполнения по п. 1, причем блок (111) оценки дополнительно выполнен с возможностью:
вычисления позиции второго трека к моменту времени другой кривой эхо-сигнала с применением только функциональных взаимосвязей между N-1 парами N треков кривых эхо-сигналов, причем N - положительное целое число.
8. Устройство измерения уровня заполнения по п. 1,
причем первые эхо-сигналы представляют собой многократные эхо-сигналы, которые вызваны многократными отражениями.
9. Устройство измерения уровня заполнения по п. 1,
причем первые эхо-сигналы представляют собой многократные эхо-сигналы от поверхности загруженного продукта; и
вторые эхо-сигналы представляют собой однократные эхо-сигналы от поверхности загруженного продукта.
10. Способ определения уровня заполнения, причем способ содержит следующие этапы:
регистрируют несколько следующих во времени друг за другом кривых эхо-сигналов;
определяют, соответственно, первый эхо-сигнал и второй эхо-сигнал в каждой из зарегистрированных кривых эхо-сигналов путем оценки кривых эхо-сигналов, причем первые эхо-сигналы ассоциируются с любым первым треком и вторые эхо-сигналы ассоциируются с любым вторым треком;
вычисляют первую функциональную взаимосвязь между позициями первого трека и позициями второго трека кривых эхо-сигналов;
регистрируют другую кривую эхо-сигнала;
определяют позицию первого эхо-сигнала другой кривой эхо-сигнала путем оценки другой кривой эхо-сигнала, причем первый эхо-сигнал принадлежит первому треку;
вычисляют позицию второго трека к моменту времени другой кривой эхо-сигнала с применением позиции первого эхо-сигнала другой кривой эхо-сигнала или позиции первого трека к моменту времени другой кривой эхо-сигнала и первой функциональной взаимосвязи.
11. Считываемый компьютером носитель (122), на котором сохранен программный элемент, который при исполнении на процессоре (121) устройства (101) измерения уровня заполнения предписывает устройству измерения уровня заполнения выполнять этапы способа по п. 10.
| УСТРОЙСТВО ДЛЯ ГЕОЭЛЕКТРОРАЗВЕДКИ | 2008 |
|
RU2366983C1 |
| Способ сбраживания осадка сточных вод | 1979 |
|
SU882956A1 |
| Способ измерения уровня | 1981 |
|
SU972237A1 |
| ДВЕРНОЙ ДЕМПФЕР (ВАРИАНТЫ) И СНАБЖЕННЫЙ ИМ ЭЛЕКТРОННЫЙ БЫТОВОЙ ПРИБОР | 2005 |
|
RU2309235C2 |

