Родственные заявки
[0001] Настоящая заявка ссылается на приоритет предварительной заявки США №61/235027, зарегистрированной 21 января 2011 г., содержание которой во всей полноте включается в настоящую заявку путем ссылки.
Область изобретения
[0002] Варианты настоящего изобретения относятся к способам и системам управления горным комбайном, таким как горный комбайн непрерывного действия.
Сущность изобретения
[0003] Горный комбайн непрерывного действия обычно имеет прочный режущий барабан или головку, состоящую из множества секций. Однако между соседними секциями режущей головки образуется выемка. Выемка обусловлена ребром коробки привода режущей головки в месте проникновения приводного механизма для приведения в движение режущего барабана. Резцы на режущей головке обычно не могут дотянуться до горной породы, которая попадает в выемку и, следовательно, не могут разрушить породу, накапливающуюся в выемке. Породу, которая остается в выемке, часто называют целиком. Если разрезаемая порода является мягкой, целик обычно можно разрушить скалывателем, расположенным в выемке. Однако если порода твердая, разбить целик скалывателем очень трудно, и горный комбайн не может внедриться в породу так же эффективно.
[0004] Соответственно, варианты осуществления изобретения предлагают системы и способы управления горным комбайном. В одной системе изменяют скорости систем левой и правой тележек, включенных в состав горного комбайна непрерывного действия для совершения режущей головкой колебательных движений назад и вперед (например, влево и вправо) по мере внедрения в породу. Эти колебательные или «качательные» движения режущей головки помогают разрушить целик, накапливающийся в выемке, что увеличивает производительность горного комбайна, особенно при резании твердой породы. Кроме того, использование «качательного» движения может позволить использовать в горном комбайне различные виды режущих головок вместо режущих устройств типа «риппервейер» (ryperveyor), таких как режущие головки барабанного типа.
[0005] В одном варианте осуществления изобретения предлагается система управления горным комбайном. Система включает режущую головку, системы левой и правой тележек и контроллер режущей головки. Режущая головка содержит множество резцов и множество секций, образующих по меньшей мере одну выемку. Системы левой и правой тележек выполнены с возможностью перемещения горного комбайна, а контроллер режущей головки выполнен с возможностью изменения текущей скорости по меньшей мере одной из системы левой тележки и системы правой тележки для совершения режущей головкой колебательных движений назад и вперед для приведения множества резцов во взаимодействие с породой, накапливающейся внутри по меньшей мере одной выемки.
[0006] В другом варианте осуществления изобретения предлагается выполняемый на компьютере способ управления горным комбайном, в котором комбайн имеет режущую головку, включающую множество резцов и по меньшей мере одну выемку, системы левой и правой тележек, выполненных с возможностью передвижения горного комбайна, и контроллер режущей головки. Способ включает: (а) установку с помощью контроллера режущей головки корректировочной переменной; (b) корректировку с помощью контроллера режущей головки текущей скорости по меньшей мере одной из системы левой тележки и системы правой тележки, на основе корректировочного параметра; (с) изменение с помощью контроллера режущей головки корректировочного параметра; и (d) повторение шагов (b)-(с) для совершения режущей головкой колебательных движений назад и вперед для приведения множества резцов во взаимодействие с породой, накапливающейся внутри по меньшей мере одной выемки.
[0007] В еще одном варианте осуществления изобретения предлагается машиночитаемый носитель с закодированным множеством выполняемых процессором команд для управления горным комбайном, при этом горный комбайн имеет режущую головку, включающую множество резцов и по меньшей мере одну выемку, а также системы левой и правой тележек, выполненные с возможностью передвижения горного комбайна. Команды включают: (а) установку корректировочного параметра; (b) корректировку текущей скорости по меньшей мере одной из системы левой тележки и системы правой тележки, на основе корректировочного параметра; (с) изменение корректировочного параметра; и (d) повторение шагов (b)-(с) для совершения режущей головкой колебательных движений назад и вперед для приведения множества резцов во взаимодействие с породой, накапливающейся внутри по меньшей мере одной выемки.
[0008] Другие аспекты изобретения станут очевидными при рассмотрении подробного описания и сопроводительных чертежей.
Краткое описание чертежей
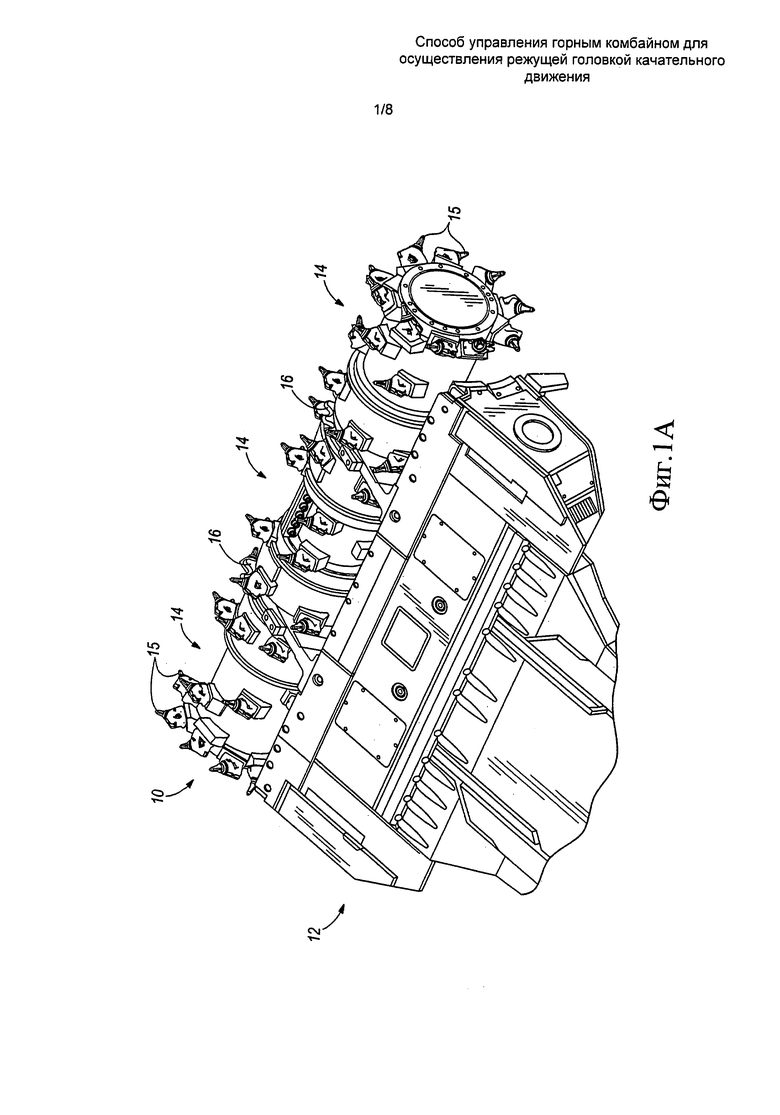
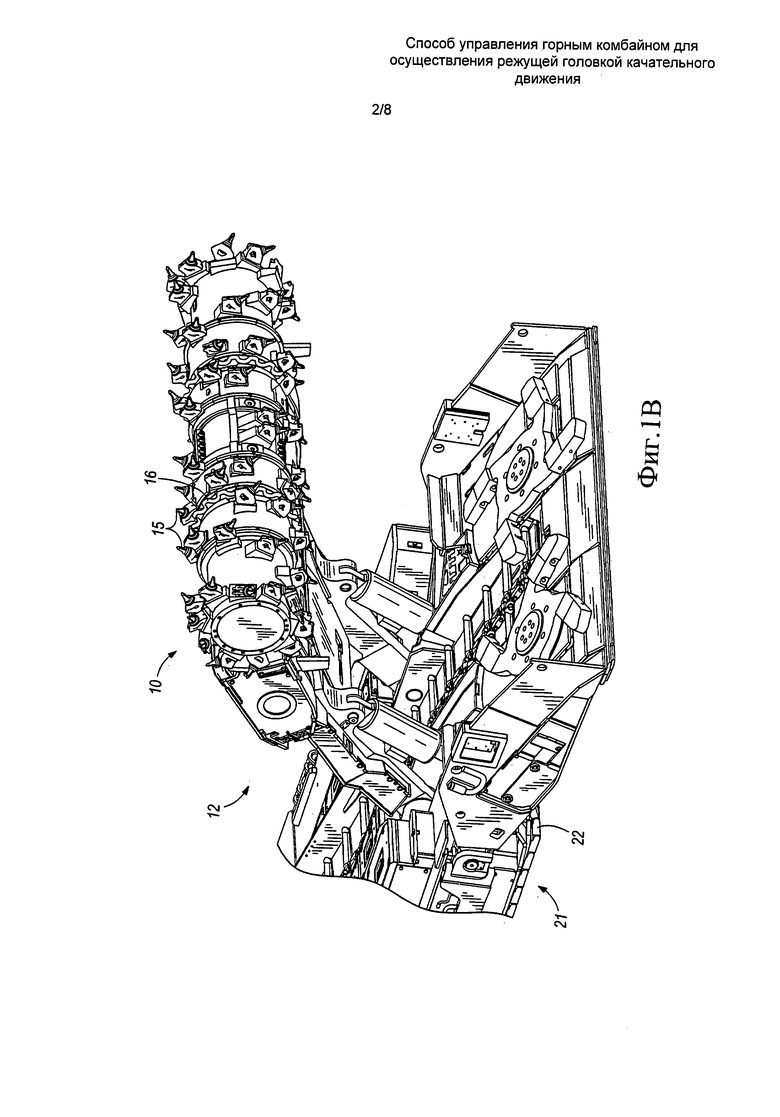
[0009] На фиг.1А и 1В приведены перспективные изображения режущей головки горного комбайна непрерывного действия, имеющего скалыватели целика, в соответствии с одним вариантом осуществления изобретения.
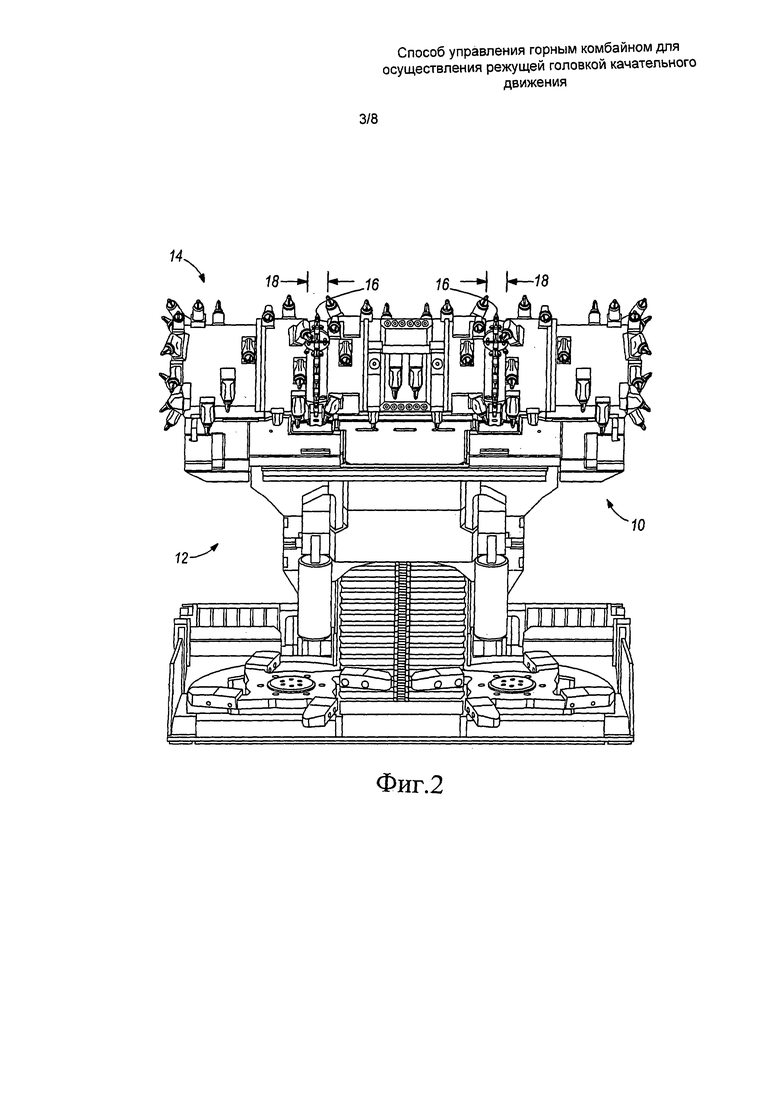
[0010] На фиг.2 представлен вид спереди режущей головки, изображенной на фиг.1А и 1В.
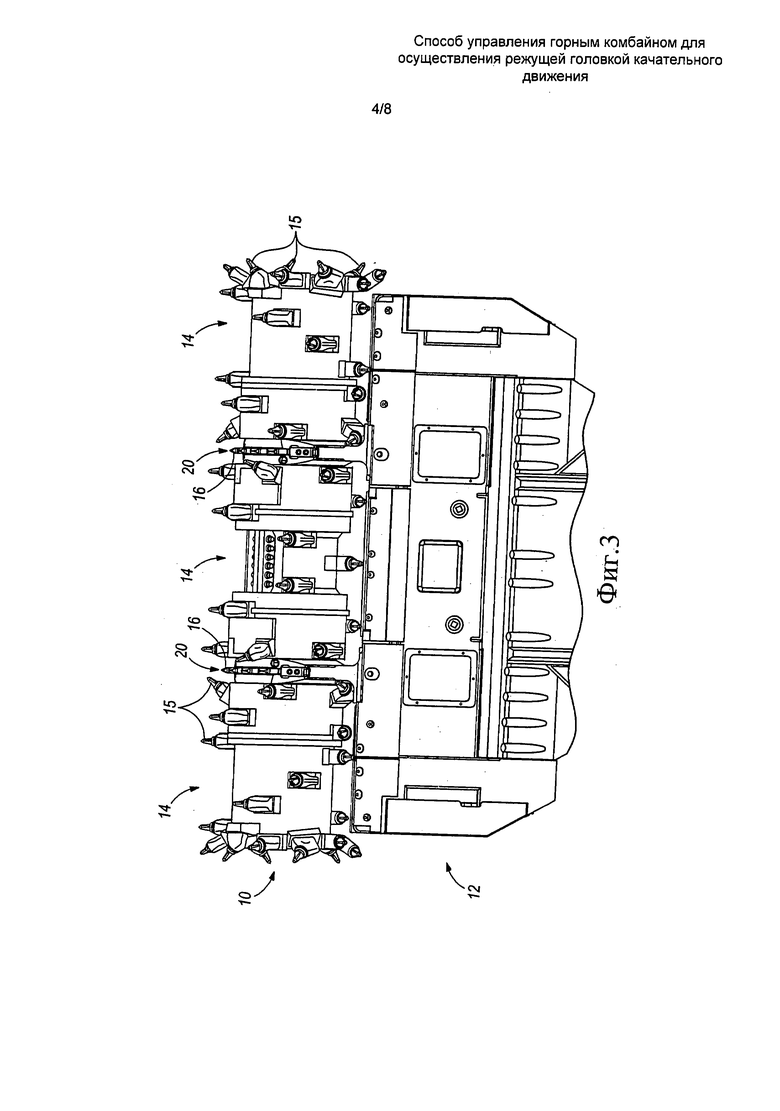
[0011] На фиг.3 представлен вид сверху режущей головки, изображенной на фиг.1А и 1В, в действии, когда целик в выемках между секциями режущей головки не разрезан.
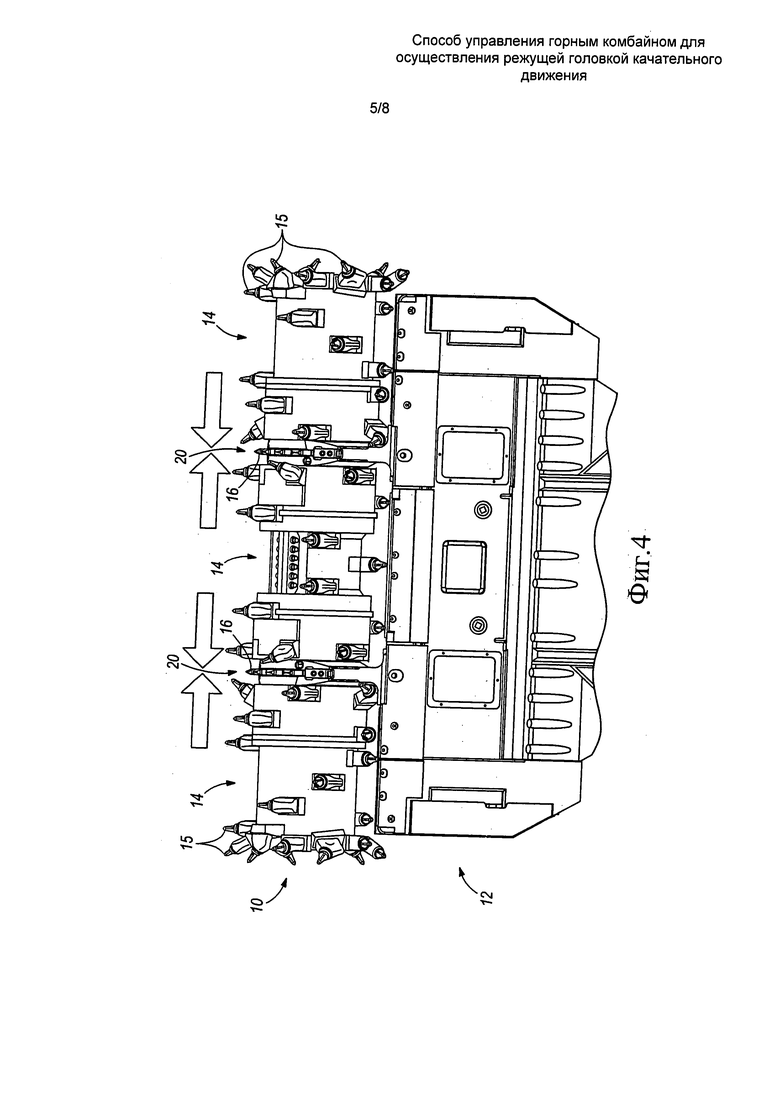
[0012] На фиг.4 представлен вид сверху режущей головки, изображенной на фиг.1А и 1В, в действии, когда скорость систем левой и правой тележек изменяют для резания целика, оставшегося в выемках.
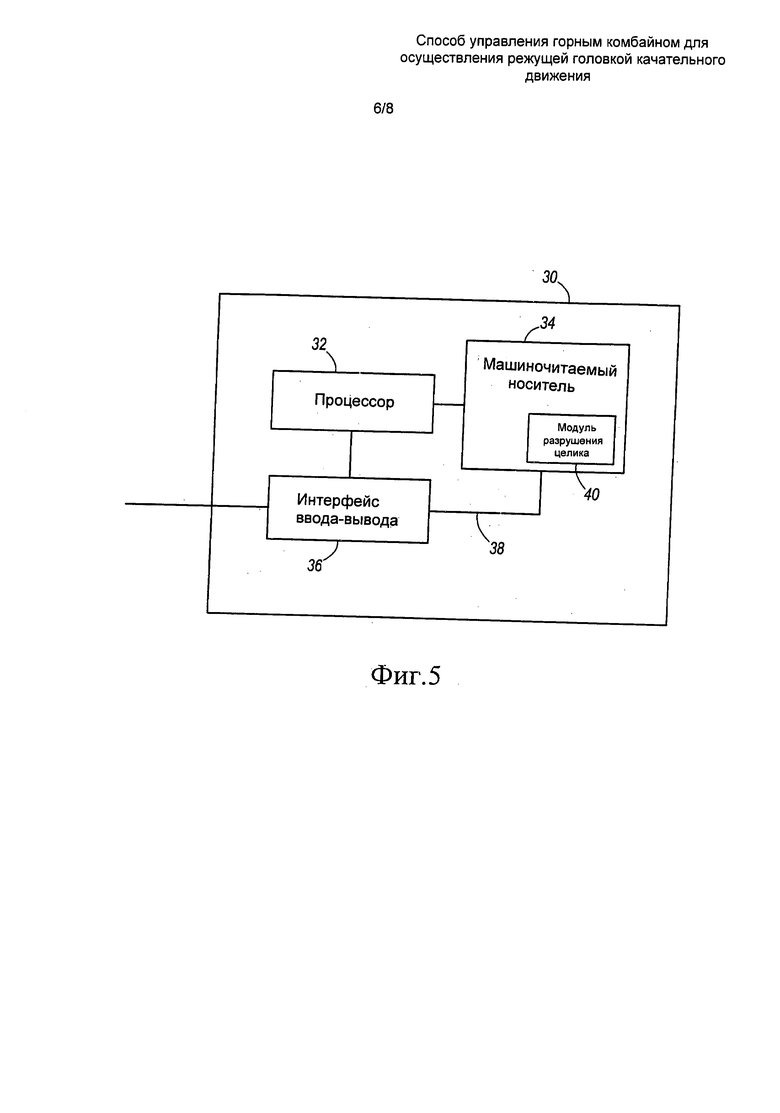
[0013] Фиг.5 схематически показывает контроллер режущей головки, изображенной на фиг.1А и 1В.
[0014] На фиг.6 приведена блок-схема, иллюстрирующая способ, выполняемый контроллером режущей головки, изображенной на фиг.5, для изменения скорости систем левой и правой тележек.
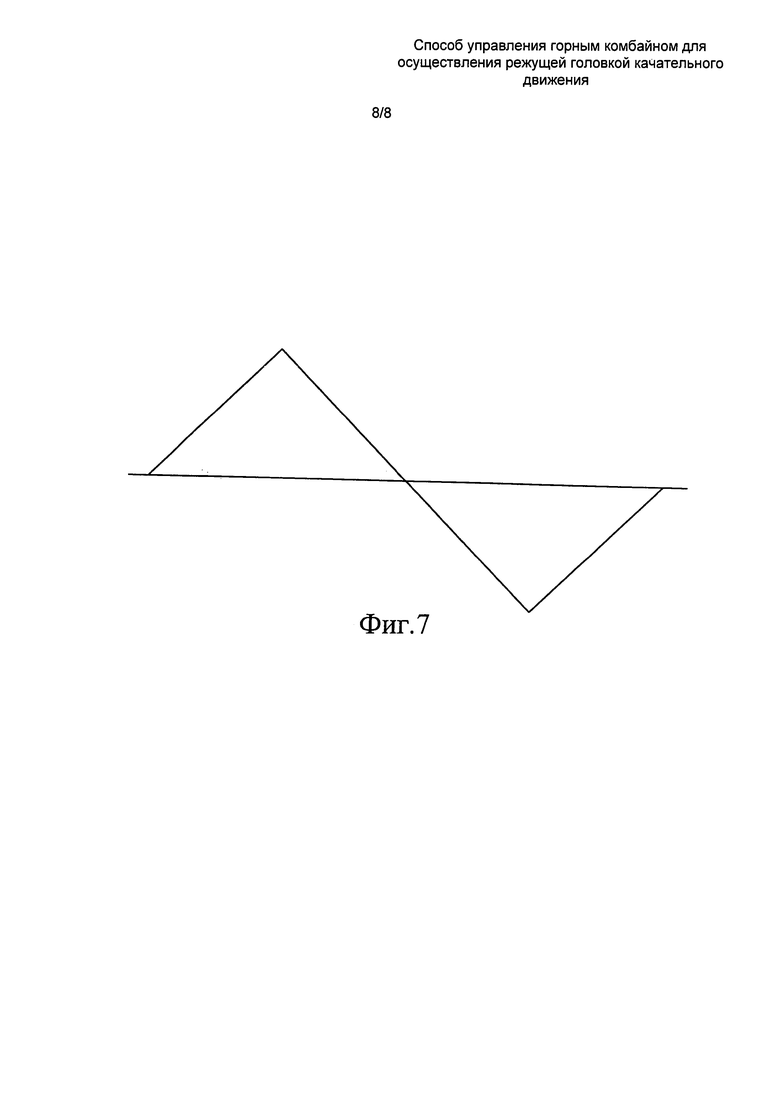
[0015] На фиг.7 показана форма сигнала в соответствии с одним вариантом осуществления изобретения.
Подробное описание изобретения
[0016] Прежде чем какие-либо варианты осуществления изобретения будут подробно описаны, следует понимать, что изобретение не ограничивается в применении деталями конструкции и компоновкой элементов, представленными в последующем описании или проиллюстрированными на последующих чертежах. Изобретение может иметь различные варианты осуществления и может быть использовано на практике или выполнено различными путями. Кроме того, следует также понимать, что фразеология и терминология, используемые в настоящей заявке, приводятся только для цели описания и не должны рассматриваться как ограничивающие. Использование терминов «включающий», «содержащий» и «имеющий», а также их варианты означают включение элементов, указанных после термина, а также их эквивалентов и других элементов. Если иное не определено и не ограничено, термины «скомпонованный», «соединенный», «опирающийся» или «связанный», а также их варианты используются широко и подразумевают как прямо, так и косвенно компоновки, соединения, опоры и связи.
[0017] Кроме того, следует понимать, что варианты осуществления изобретения могут включать аппаратное обеспечение, программное обеспечение, а также электронные компоненты и модули, которые для целей описания могут быть показаны и описаны таким образом, как будто большая часть компонентов выполнены исключительно в виде аппаратных средств. Однако специалисту, прочитавшему настоящее подробное описание, следует понимать, что по меньшей мере в одном варианте осуществления изобретения электронные аспекты изобретения могут быть выполнены в виде программного обеспечения (например, сохранены на не изменяемом во времени машиночитаемом носителе). В таком случае следует заметить, что для осуществления настоящего изобретения может быть использовано множество различных аппаратных и программных устройств, а также множество различных структурных компонентов. Кроме того, как описано в последующих параграфах, конкретные механические конструкции, проиллюстрированные на чертежах, представлены только в качестве примеров вариантов осуществления изобретения и возможны другие варианты механических конструкций.
[0018] На фиг.1А и 1В представлен режущий барабан или головка 10 горного комбайна 12 непрерывного действия в соответствии с одним вариантом осуществления изобретения. Как показано на фиг.1А, режущая головка 10 содержит множество секций 14, и каждая секция 14 содержит множество резцов 15. Между соседними секциями 14 находится скалыватель целика («СЦ») 16. Каждый скалыватель 16 целика располагается в границах выемки 18, сформированной между секциями 14 режущей головки (см. фиг.2). Выемка 18 формируется ребром коробки привода режущей головки в месте проникновения приводного механизма для приведения в движение режущей головки 10. Как описано выше, резцы 15 не могут разрезать породу, попадающую в выемки 18, и оставшаяся в выемках 18 порода часто называется целиком. Например, как показано на фиг.3, порода в целике (представленная треугольниками 20), попадающая в выемки 18, находится вне зоны действия резцов 15 на режущей головке 10. Следовательно, целик 20 накапливается в выемках 18 и не может быть разрезан резцами 15. Если целик содержит мягкую породу, скалыватель 16 целика, расположенный в каждой выемке 18, может разрушить целик. Однако если целик состоит из более твердой породы, могут возникнуть трудности с разрушением целика с помощью скалывателя 16 целика, что ухудшит производительность горного комбайна.
[0019] Как описано более подробно ниже со ссылкой на фиг.6, когда скалыватель 16 целика не может эффективно разрушить целик, накапливающийся в выемках 18, режущая головка 10 может совершать колебательные движения назад и вперед (например, слева направо) при внедрении в породу. Эти колебательные или «качательные» движения позволяют резцам 15 входить в контакт с целиком 20 в выемках 18. Для выполнения такого колебательного движения скорости левой и правой тележек режущей головки 10 могут быть изменены в течение заданного периода времени для перемещения режущей головки 10 влево и вправо по мере продвижения тележек горного комбайна 12 в прямом направлении.
[0020] В частности, горный комбайн 12 непрерывного действия имеет системы тележек, включающие гусеничные цепи, с каждой стороны комбайна 12, которые могут независимо управляться для приведения в движение с одной скоростью или с разными скоростями. Например, как показано на фиг.1 В, горный комбайн 12 может иметь систему правой тележки 21, включающую правую гусеничную цепь 22. Комбайн 12 может содержать соответствующую систему левой тележки, включающую левую гусеничную цепь с противоположной стороны горного комбайна 12. Когда установлены одинаковые скорости, системы тележек перемещают режущую головку 10 в прямом направлении. В то же время каждая система тележки может перемещать режущую головку 10 влево или вправо в зависимости от того, возрастает или уменьшается скорость системы тележки. Например, если скорость системы правой тележки уменьшена до величины, когда она становится меньше скорости системы левой тележки, тогда левая система тележки движется быстрее, что заставляет режущую головку 10 перемещаться вправо. Подобным образом если скорость системы левой тележки уменьшается до величины, когда она становится меньше скорости системы правой тележки, тогда правая система тележки движется быстрее, что заставляет режущую головку 10 перемещаться влево. Изменяя скорости левой и правой тележек при продвижении горного комбайна 12 в породе, создается колебательное или «качательное» движение режущей головки 10, что помогает разбивать целик, оставшийся в выемках. В частности, использование «качательного» движения позволяет воздействовать на целик 20 с обеих сторон (как показано стрелками на фиг.4), что помогает разрушить целик 20 резцами 15 с левой стороны и с правой стороны от целика 20, а не прямо с помощью скалывателя 16 целика. В других вариантах скорости конкретных барабанов или секций режущей головки 10 тоже могут быть изменены для совершения режущей головкой 10 колебательных движений назад и вперед.
[0021] Следует также понимать, что режущая головка 10 может управляться контроллером режущей головки. Контроллер режущей головки может содержать электрические компоненты, механические компоненты, компоненты программного обеспечения или их комбинации, которые управляют работой режущей головки 10. На фиг.5 схематически изображен контроллер 30 режущей головки в соответствии с одним вариантом осуществления изобретения. Следует понимать, что на фиг.5 показан только один пример компонентов контроллера 30 режущей головки и что возможны другие конфигурации. Как показано на фиг.5, контроллер 30 содержит процессор 32, машиночитаемый носитель 34 и интерфейс 36 ввода-вывода. Процессор 32, машиночитаемый носитель 34 и интерфейс 36 ввода-вывода соединены одним или более соединениями 38, таким как системная шина. Следует понимать, что хотя на фиг.5 показаны только один процессор 32, один модуль машиночитаемого носителя 34 и один интерфейс 36 ввода-вывода, контроллер 30 может содержать множество процессоров 32, модулей машиночитаемого носителя 34 и интерфейсов 36 ввода-вывода. Следует также понимать, что контроллер 30 режущей головки может быть объединен с другими контроллерами. Например, контроллер 30 режущей головки может быть частью общего контроллера горного комбайна 12.
[0022] Процессор 32 извлекает и выполняет команды, хранящиеся на машиночитаемом носителе 34. Процессор 32 может также сохранять данные на машиночитаемом носителе 34. Машиночитаемый носитель 34 может представлять собой не изменяемый во времени машиночитаемый носитель и может представлять собой энергозависимую память, энергонезависимую память или их комбинацию. В некоторых вариантах машиночитаемый носитель 34 содержит дисковод или другие виды запоминающих устройств большой емкости.
[0023] Интерфейс 36 ввода-вывода получает информацию извне контроллера 30 и выдает информацию за границы контроллера 30. Например, интерфейс 36 ввода-вывода может передавать сигналы, данные, команды и запросы механическому и электрическому оборудованию, расположенному за границами контроллера 30, который управляет режущей головкой 10 или другими компонентами горного комбайна 12 или контролирует их.
[0024] Команды, хранящиеся на машиночитаемом носителе 34, могут содержать различные компоненты или модули, выполненные с возможностью осуществления определенных функций при их выполнении процессором 32. Например, машиночитаемый носитель 34 может содержать модуль 40 разрушения целика, как показано на фиг.5. Модуль 40 разрушения целика может быть выполнен процессором 32 для изменения скоростей левой и правой тележек режущей головки 10 при продвижении горного комбайна 12 в прямом направлении. Как описано выше, изменение скоростей тележек заставляет режущую головку 10 колебаться назад и вперед при внедрении в прямом направлении в породу. Такое колебательное или «качательное» движение помогает разрушать целик 20, накапливающийся в выемках 18. Как описано ниже со ссылкой на фиг.6, для определения степени колебательного движения режущей головки - 10 может быть использован параметр амплитуды, который определяет насколько изменяется скорость левой и/или правой тележки. Также для определения периода «качательного» движения может использоваться параметр периода, который определяет сколько времени занимает один «качательный» цикл.
[0025] На фиг.6 представлена блок-схема, иллюстрирующая способ, реализуемый контроллером 30 при выполнении модуля 40 разрушения целика в соответствии с одним вариантом осуществления изобретения. Как показано на фиг.6, способ начинается с определения того, выдал ли оператор горного комбайна 12 команду на тележку (шаг 50). Если оператор выдал команду на тележку, способ определяет, установлено ли значение параметра амплитуды больше нуля (шаг 52). Первоначально, когда происходит загрузка или выполнение модуля 40 разрушения целика, параметр амплитуды может быть установлен на 0, а параметр периода может быть установлен на 1 секунду. Если разрушение целика становится проблематичным и оператор желает запустить «качательную» функцию, он может установить параметр амплитуды в ненулевое положение с помощью графического дисплея (например, на комбайне 12 или на станции или приборе дистанционного управления для комбайна 12).
[0026] Затем оператор может установить параметр амплитуды на значение, соответствующее желаемой степени «качания». Подобным образом оператор может также установить и параметр периода. В некоторых вариантах осуществления изобретения параметр амплитуды может быть установлен в промежутке от 0 до 30 и может быть установлен в процентах от максимальной скорости резания горного комбайна 12. Значения одного или обоих параметров может быть также установлено автоматически модулем 40 на основе работы горного комбайна 12 или различных датчиков, определяющих различные параметры целика. Например, модуль 40 разрушения целика может автоматически определить примерный параметр амплитуды и/или периода и может отобразить на дисплее оператора примерный параметр (примерные параметры) для проверки или ручного управления.
[0027] Если параметр амплитуды имеет значение больше нуля, способ определяет, движутся ли системы тележек горного комбайна 12 в прямом направлении (шаг 54). Если системы тележек движутся вперед, то комбайн 12 внедряется в прямом направлении в породу и следует включить «качательную» функцию для разрушения материала целика, накапливающегося в выемках 18. Таким образом, в некоторых вариантах осуществления изобретения способ генерирует сигнал (шаг 56), такой как сигнал треугольной формы, изображенный на фиг.7. Как описано ниже, сигнал используется для изменения скорости системы левой и системы правой тележек в течение заданного периода времени для перемещения режущей головки 10 влево и вправо (например, «качание» режущей головки 10) для разрушения целика. Модуль 40 генерирует сигнал на основе значений параметра амплитуды и параметра периода (то есть, как установлено оператором или модулем 40). Например, сигнал имеет период и текущую амплитуду при различных интервалах времени в течение периода сигнала. Максимальная амплитуда сигнала треугольной формы может быть примерно равна значению параметра амплитуды, а период сигнала треугольной формы может быть примерно равен значению параметра периода (данные 60).
[0028] В случае, если оператор не выдал команду на тележку (шаг 50), как показано на фиг.6, параметр амплитуды не превышает ноль (шаг 52) или системы тележек не двигаются в прямом направлении (шаг 54), комбайн 12 не работает в условиях, когда материл целика, накапливающийся в выемках 18, представляет проблему. Следовательно, в данной ситуации корректировочная переменная, которая используется модулем 40 для изменения скоростей тележек, как описано ниже, устанавливается на ноль (шаг 58) и сигнал треугольной формы не генерируется.
[0029] После того как сигнал сгенерирован, он используется для изменения скоростей левой и правой тележек режущей головки 10 в течение заданного периода времени. Например, период сигнала устанавливает заданный период времени, в течение которого скорости тележек изменяются (то есть, времени, в течение которого выполняется «качательное» движение), и корректировочную переменную устанавливают на текущую амплитуду сигнала в каждом интервале времени в течение периода сигнала. Следовательно, первоначально, после того, как сигнал сгенерирован, корректировочную переменную устанавливают на амплитуду сигнала в первоначальный интервал времени (например, начало сигнала). Затем в каждый интервал времени в течение периода сигнала значение корректировочной переменной переустанавливают на амплитуду сигнала в данный интервал времени.
[0030] В каждый интервал времени корректировочная переменная затем прибавляется к текущей скорости левой или правой тележки или вычитается из скорости левой или правой тележки для увеличения или уменьшения текущей скорости левой или правой тележки в соответствии с текущей амплитудой сигнала. Когда это выполняется в течение периода сигнала, режущая головка 10 совершает движения назад и вперед в виде «качательного» движения, что приводит резцы 15 во взаимодействие с целиком 20. Поскольку резцы 15 воздействуют на целик 20 слева и справа при осуществлении «качательного» движения, целик 20 разрезается и разрушается, что позволяет горному комбайну 12 эффективно продвигаться вперед.
[0031] Например, как показано на фиг.6, после того, как сигнал треугольной формы сгенерирован (шаг 56) или настройка скалывателя целика установлена на ноль (шаг 58), способ определяет, имеет ли корректировочная переменная значение больше нуля (шаг 62). Как описано выше, если нет необходимости проводить разрушение целика, корректировочная переменная устанавливается на ноль (шаг 58), но, если необходимо производить разрушение целика, корректировочная переменная устанавливается на амплитуду сигнала в текущий интервал времени. Таким образом, если корректировочная переменная имеет значение больше нуля, модуль 40 производит вычитание величины корректировочной переменной из текущей скорости левой тележки для уменьшения ее скорости в соответствии с величиной корректировочной переменной (шаг 64).
[0032] В случае, если корректировочная переменная не превышает ноль (шаг 62), способ определяет, имеет ли корректировочная переменная значение меньше ноля (шаг 66). Если значение корректировочной переменной меньше ноля, модуль 40 прибавляет отрицательное значение корректировочной переменной к текущей скорости правой тележки для уменьшения ее скорости в соответствии с величиной корректировочной переменной (шаг 68). Таким образом, если корректировочная переменная была установлена в ноль (шаг 58), не производится никакой корректировки текущей скорости левой или правой тележки с помощью модуля 40 разрушения целика. Однако если корректировочная переменная установлена в ненулевое значение, скорость либо левой, либо правой тележки корректируется на основе корректировочной переменной для того, чтобы скорость одной из тележек оказалась больше скорости другой тележки, что приводит к движению режущей головки 10 либо влево, либо вправо. Следует понимать, что вычитание значения корректировочной переменной для одной тележки эквивалентно прибавлению значения корректировочной переменной для другой тележки. Например, на шаге 68 значение корректировочной переменной может быть либо прибавленным к текущей скорости правой тележки, либо быть вычтенным из текущей скорости левой тележки для достижения того же результата (то есть режущая головка 10 движется вправо). Однако в некоторых вариантах осуществления изобретения может оказаться более эффективным и/или безопасным уменьшать скорость тележки, а не увеличивать ее.
[0033] После того как скорость левой или правой тележки изменится на основании корректировочной переменной, значение этой переменной может быть скорректировано или переустановлено на амплитуду сигнала в следующий или последующий интервал времени в течение периода сигнала. Эта процедура может повторяться для периода сигнала, что принуждает режущую головку 10 совершать колебательные движения назад и вперед для приведения резцов 15 во взаимодействие с целиком, накапливающимся в выемке 18. После приложения всего сигнала модуль 40 может повторить способ, изображенный на фиг.6, и может быть сгенерирован новый сигнал. Либо сигнал, первоначально сгенерированный модулем 40, может быть использован повторно или обработан повторно один или более раз.
[0034] Как упоминалось выше, изменение скорости левой и правой тележек приводит к совершению режущей головкой колебательного движения назад и вперед. Такое «качательное» движение режущей головки помогает разрушить целик, накапливающийся в выемках 18, что повышает производительность горного комбайна 12, особенно при резании твердой породы. Кроме того, «качательное» движение может позволить комбайну 12 использовать различные типы режущих головок вместо резцов типа «риппервейер», таких как режущие головки барабанного типа.
[0035] Также следует понимать, что генерирование сигнала является только одним методом для изменения или чередования скоростей систем тележек. Например, скорости тележек могут быть изменены на основе постоянной величины, которая может быть применена для какого-либо заданного периода времени для каждой из систем тележек. Например, первоначально скорость правой тележки может быть уменьшена на желаемую величину в течение заданного периода времени (что перемещает режущую головку 10 влево), а затем скорость левой тележки может быть уменьшена на желаемую величину в течение заданного периода времени (что перемещает режущую головку 10 вправо). Процесс может быть повторен столько раз, сколько необходимо для эффективного разрушения целика, накапливающегося в выемках 18. В другом варианте скорости каждой системы тележек могут быть скорректированы с использованием различных величин (например, установленных автоматически или ручным образом) и/или скорость каждой системы тележек может быть скорректирована для какого-либо другого периода времени. Такое неровное колебательное движение может создать неровное «качание», когда режущая головка 10 может перемещаться в одном направлении (то есть влево или вправо) больше, чем в другом направлении, что может вызвать перемещение горного комбайна 12 либо влево или вправо в течение продолжительного периода времени. Кроме того, в некоторых вариантах оператор может использовать кнопку или переключатель на дисплее для ручного увеличения или уменьшения одной из скоростей тележек на заданную величину столько времени, сколько оператор удерживает кнопку или переключатель или задействует их.
[0036] Различные особенности и преимущества изобретения излагаются в последующих пунктах формулы изобретения.

Изобретение относится к системе и способу управления горным комбайном, таким как горный комбайн непрерывного действия, а также к машиночитаемому носителю, содержащему команды для управления горным комбайном. Система содержит режущую головку, систему левой тележки, систему правой тележки и котроллер режущей головки. Режущая головка содержит множество резцов и множество секций, формирующих по меньшей мере одну выемку. Системы левой и правой тележек выполнены с возможностью перемещения комбайна, а контроллер режущей головки выполнен с возможностью установки корректировочной переменной, корректировки скорости по меньшей мере одной из системы левой тележки и системы правой тележки на основе корректировочной переменной, изменения корректировочной переменной и повторения для совершения режущей головкой колебательных движений назад и вперед для приведения множества резцов во взаимодействие с породой, накапливающейся внутри по меньшей мере одной выемки. 3 н. и 22 з.п. ф-лы, 7 ил.
1. Система управления горным комбайном, включающая:
режущую головку, которая содержит множество резцов и множество секций, образующих по меньшей мере одну выемку;
системы левой и правой тележек, выполненные с возможностью перемещения горного комбайна; и
контроллер режущей головки, выполненный с возможностью:
(a) установки корректировочной переменной;
(b) корректировки скорости по меньшей мере одной из системы левой тележки и системы правой тележки на основе корректировочной переменной;
(c) изменения корректировочной переменной; и
(d) повторения (b)-(c) для совершения режущей головкой колебательных движений назад и вперед для приведения множества резцов во взаимодействие с породой, накапливающейся внутри по меньшей мере одной выемки.
2. Система по п. 1, в которой контроллер режущей головки также выполнен с возможностью приема значения параметра амплитуды от оператора.
3. Система по п. 2, в которой контроллер режущей головки выполнен с возможностью изменения скорости по меньшей мере одной из системы левой тележки и системы правой тележки для совершения колебательных движений назад и вперед на основе значения параметра амплитуды.
4. Система по п. 1, в которой контроллер режущей головки выполнен с возможностью изменения скорости по меньшей мере одной из системы левой тележки и системы правой тележки посредством генерирования сигнала, имеющего период и текущую амплитуду в каждом из множества интервалов времени в течение периода сигнала.
5. Система по п. 4, в которой контроллер режущей головки выполнен с возможностью изменения скорости по меньшей мере одной из системы левой тележки и системы правой тележки посредством приложения текущей амплитуды в каждом из множества интервалов времени к скорости по меньшей мере одной из системы левой тележки и системы правой тележки в течение периода сигнала.
6. Система по п. 5, в которой контроллер режущей головки выполнен с возможностью приложения текущей амплитуды в каждом из множества интервалов времени к скорости по меньшей мере одной из системы левой тележки и системы правой тележки в течение периода сигнала для уменьшения скорости системы левой тележки в соответствии с текущей амплитудой сигнала.
7. Система по п. 6, в которой контроллер режущей головки выполнен с возможностью уменьшения скорости системы левой тележки в соответствии с текущей амплитудой сигнала, когда текущая амплитуда больше нуля.
8. Система по п. 5, в которой контроллер режущей головки выполнен с возможностью приложения текущей амплитуды в каждом из множества интервалов времени к скорости по меньшей мере одной из системы левой тележки и системы правой тележки, в течение периода сигнала для уменьшения скорости системы правой тележки в соответствии с текущей амплитудой сигнала.
9. Система по п. 8, в которой контроллер режущей головки выполнен с возможностью уменьшения скорости системы правой тележки в соответствии с текущей амплитудой сигнала, когда текущая амплитуда сигнала меньше нуля.
10. Компьютерный способ для управления горным комбайном, имеющим режущую головку, которая содержит множество резцов и по меньшей мере одну выемку, системы левой и правой тележек, выполненные с возможностью перемещения горного комбайна, и контроллер режущей головки, способ включает:
(a) установку с помощью контроллера режущей головки корректировочной переменной;
(b) корректировку с помощью контроллера режущей головки скорости по меньшей мере одной из системы левой тележки и системы правой тележки на основе корректировочной переменной;
(c) изменение с помощью контроллера режущей головки корректировочной переменной; и
(d) повторение (b)-(c) для совершения режущей головкой колебательных движений назад и вперед для приведения множества резцов во взаимодействие с породой, накапливающейся внутри по меньшей мере одной выемки.
11. Способ по п. 10, также включающий прием контроллером режущей головки значения параметра амплитуды от оператора.
12. Способ по п. 11, в котором установка корректировочной переменной и изменение корректировочной переменной включает установку корректировочной переменной на основе значения параметра амплитуды и корректировку корректировочной переменной на основе значения параметра амплитуды.
13. Способ по п. 10, в котором установка корректировочной переменной включает генерирование сигнала, имеющего период и текущую амплитуду для каждого из множества интервалов времени в течение периода сигнала.
14. Способ по п. 13, в котором установка корректировочной переменной включает установку корректировочной переменной на текущую амплитуду сигнала.
15. Способ по п. 14, в котором корректировка текущей скорости по меньшей мере одной из системы левой тележки и системы правой тележки включает уменьшение скорости системы левой тележки в соответствии с корректировочной переменной.
16. Способ по п. 15, в котором уменьшение скорости системы левой тележки в соответствии с корректировочной переменной включает уменьшение скорости системы левой тележки в соответствии с корректировочной переменной, когда текущая амплитуда сигнала больше нуля.
17. Способ по п. 14, в котором корректировка текущей скорости по меньшей мере одной из системы левой тележки и системы правой тележки включает уменьшение скорости системы правой системы тележки в соответствии с корректировочной переменной.
18. Способ по п. 17, в котором уменьшение скорости системы правой тележки в соответствии с корректировочной переменной включает уменьшение скорости системы правой системы тележки в соответствии с корректировочной переменной, когда текущая амплитуда сигнала меньше нуля.
19. Способ по п. 17, в котором изменение корректировочной переменной включает установку корректировочной переменной на текущую амплитуду сигнала в последующем интервале времени.
20. Машиночитаемый носитель с закодированным множеством выполняемых процессором команд для управления горным комбайном, имеющим режущую головку, которая содержит множество резцов и по меньшей мере одну выемку, а также системы левой и правой тележек, выполненные с возможностью перемещения горного комбайна, при этом указанные команды включают:
(a) установку корректировочной переменной;
(b) корректировку скорости по меньшей мере одной из системы левой тележки и системы правой тележки на основе корректировочной переменной;
(c) изменение корректировочной переменной; и
(d) повторение шагов (b)-(c) для совершения режущей головкой колебательных движений назад и вперед для приведения множества резцов во взаимодействие с породой, накапливающейся внутри по меньшей мере одной выемки.
21. Машиночитаемый носитель по п. 20, также содержащий команды для приема значения параметра амплитуды от оператора.
22. Машиночитаемый носитель по п. 21, в котором команды для установки корректировочной переменной включают команды для генерирования сигнала на основе параметра амплитуды, причем сигнал имеет период и текущую амплитуду для каждого из множества интервалов времени в течение периода сигнала.
23. Машиночитаемый носитель по п. 22, в котором команды для установки корректировочной переменной включают команды для установки корректировочной переменной на текущую амплитуду сигнала для текущего интервала времени.
24. Машиночитаемый носитель по п. 23, в котором команды для корректировки скорости по меньшей мере одной из системы левой тележки и системы правой тележки включают команды для уменьшения скорости по меньшей мере одной из системы левой тележки и системы правой тележки в соответствии с корректировочной переменной.
25. Машиночитаемый носитель по п. 24, в котором команды для изменения корректировочной переменной включают команды для установки корректировочной переменной на текущую амплитуду сигнала в последующем интервале времени.
| 0 |
|
SU255159A1 | |
| ПРОХОДЧЕСКИЙ АГРЕГАТ | 2001 |
|
RU2209979C2 |
| CN 101050703 A, 10.10.2007 | |||
| US 2002113484 А1, 22.08.2002 | |||
| Оптико-электронное устройство для измерения дробной части интерференционной полосы | 1980 |
|
SU977944A1 |
| СПОСОБ МНОГООБЗОРНОГО НАКОПЛЕНИЯ СИГНАЛА В РЛС ПРИ ОБНАРУЖЕНИИ ВОЗДУШНЫХ ЦЕЛЕЙ В ИМПУЛЬСНО-ДОПЛЕРОВСКОМ РЕЖИМЕ | 2019 |
|
RU2730182C1 |
| СРЕДСТВО И СПОСОБ ПОВЫШЕНИЯ КАЧЕСТВА ЖИЗНИ МЛЕКОПИТАЮЩИХ | 2019 |
|
RU2752140C2 |

