Область техники, к которой относится изобретение
[01] Варианты осуществления, описанные в данном документе, относятся к системе разработки длинными забоями.
Раскрытие изобретения
[02] Разработка длинными забоями начинается с идентификации рудного пласта, подлежащего разработке, и “нарезки столбов” пласта на группы камер посредством выемки штреков по периметру каждой группы камер. Во время разработки пласта (например, выемки угля) выбранные целики руды можно оставлять не разработанными между смежными группами камер для содействия крепи вышележащих геологических пластов. Выемку руды в группе камер проводят посредством системы разработки длинными забоями, которая содержит такие компоненты, как автоматизированная электрогидравлическая крепь, очистной комбайн (т.e., очистной комбайн для длинного забоя), и забойный скребковый конвейер (“AFC”) параллельный плоскости рудного забоя. Когда очистной комбайн перемещается по ширине рудного забоя для удаления слоя или захватки руды, элементы крепи автоматически продвигаются вперед, чтобы нести кровлю новой вскрытой части пластов. Забойный скребковый конвейер (далее AFC) затем продвигается за элементами крепи к рудному забою на расстояние равное глубине рудного слоя, ранее удаленного очистным комбайном. Продвижение вперед AFC к рудному забою в таком режиме обеспечивает взаимодействие очистного комбайна с рудным забоем и продолжение выемки руды из рудного забоя.
[03] Можно вести мониторинг работы очистного комбайна чтобы предотвращать “потерю горизонта” системой разработки длинными забоями (т.е., обеспечивать некоторую информированность системы о том, что расположено впереди очистного комбайна). Выдерживание горизонта в системе разработки длинными забоями обеспечивает более эффективную выемку руды, благодаря максимизации выемки руды без ослабления крепи для вышележащих геологических пластов. Уход с горизонта в системе разработки длинными забоями может обуславливать ухудшение качества руды (например, когда другая руда, не уголь, извлекается вместе с углем), нарушение выравнивания забоя, или образование полости, нарушающей вышележащие пласты. В некоторых обстоятельствах уход с горизонта может обуславливать повреждение самой системы разработки длинными забоями (например, от столкновения козырька крепи с очистным комбайном).
[04] Обычно выдерживание горизонта в системе разработки длинными забоями предусматривает применение данных крепи, данных скребкового конвейера (“AFC”), данных положения очистного комбайна и других данных системы разработки длинными забоями для конструирования профиля горной разработки с задним обзором. Профиль горной разработки строится с задним обзором, основанным на данных датчика за прошедший период для определения условий рудника, которые имели место прежде (т.е., во время предыдущего цикла работы очистного комбайна на рудном забое). Например, построенный с задним обзором профиль горной разработки может характеризовать рештачный став системы горной разработки с применением измерений углового положения очистного комбайна (например, углов поперечного и продольного крена) и измерений поперечного положения очистного комбайна (например, положения по длине рудного забоя, определенного с применением датчиков откатки). Результатом получения профиля горной разработки с задним обзором является возможность оповещения оператора или системы разработки длинными забоями об условиях рудного забоя за прошедший период или прошлых потерях производительности в процессе горной разработки.
[05] Профиль горной разработки с передним обзором, с другой стороны, обеспечивает системе разработки длинными забоями управление с упреждением в готовности к условиям рудника или рудного забоя, в которых очистному комбайну вскоре предстоит работать. Например, система разработки длинными забоями может содержать одну или несколько видеокамер для захвата изображений или видеоинформации в руднике. Видеокамеры можно монтировать на очистном комбайне, крепи или другой конструкции системы разработки длинными забоями. Видеокамеры применяются для захвата изображений или видеоинформации в области впереди очистного комбайна в направлении движения очистного комбайна. Контроллер принимает сигналы с видеокамер и обрабатывает их, например, применяя методики распознавания контура и обработку изображений оптического потока. После обработки контроллером сигналов, последний может идентифицировать и оценивать конструкции перед очистным комбайном по пути впереди очистного комбайна. Например, контроллер может идентифицировать рештачный став и определять форму рештачного става, с которым очистному комбайну предстоит работать. Определенная форма рештачного става может быть включена в профиль горной разработки с передним обзором, который можно затем применять для управления системой разработки длинными забоями. Определенную форму рештачного става можно также сравнивать с ранее отображенной версией рештачного става или предыдущими данными датчика, связанными со рештачным ставом, при этом контроллер может определять изменения рештачного става по сравнению с предыдущими циклами работы очистного комбайна.
[06] Варианты осуществления, описанные в данном документе, обеспечивают систему разработки длинными забоями, которая содержит скребковый конвейер, очистной комбайн, первую видеокамеру, вторую видеокамеру и контроллер. Очистной комбайн выполнен с возможностью перемещения вдоль забойного скребкового конвейера в первом направлении или втором направлении. Очистной комбайн содержит кожух очистного комбайна, первый режущий барабан, выдвинутый в первом направлении от кожуха очистного комбайна, и второй режущий барабан, выдвинутый во втором направлении от кожуха очистного комбайна. Первая видеокамера выполнена с возможностью генерирования первого сигнала, связанного с первым направлением перемещения для очистного комбайна. Вторая видеокамера выполнена с возможностью генерирования второго сигнала, связанного с вторым направлением перемещения для очистного комбайна. Контроллер содержит постоянный машиночитаемый носитель и процессор. Контроллер также содержит выполняемые компьютером команды, сохраняемые в машиночитаемом носителе для управления работой промышленной машины, в процессе которого принимает первый сигнал с первой видеокамеры, принимает второй сигнал с второй видеокамеры, анализирует по меньшей мере один из первого сигнала и второго сигнала для идентификации одного или нескольких контуров конструкции системы разработки длинными забоями впереди очистного комбайна в любом из первого направления или второго направления, генерирует профиль горной разработки с передним обзором на основе одного или нескольких контуров, и управляет системой разработки длинными забоями на основе профиля горной разработки с передним обзором.
[07] Варианты осуществления, описанные в данном документе, также обеспечивают реализуемый посредством компьютера способ управления системой разработки длинными забоями. Система разработки длинными забоями содержит забойный скребковый конвейер, очистной комбайн, выполненный с возможностью перемещения вдоль забойного скребкового конвейера в первом направлении или втором направлении, первую видеокамеру, вторую видеокамеру и контроллер. Способ содержит прием первого сигнала с первой видеокамеры, прием второго сигнала с второй видеокамеры, анализ по меньшей мере одного из первого сигнала и второго сигнала для идентификации одного или нескольких контуров конструкции системы разработки длинными забоями впереди очистного комбайна либо в первом направлении перемещения очистного комбайна или втором направлении перемещения очистного комбайна, генерирование профиля горной разработки с передним обзором на основе одного или нескольких контуров, и управление системой разработки длинными забоями на основе профиля горной разработки с передним обзором.
[08] Варианты осуществления, описанные в данном документе, также обеспечивают контроллер для управления системой разработки длинными забоями. Контроллер содержит постоянный машиночитаемый носитель и процессор. Контроллер также содержит выполняемые компьютером команды, сохраняемые в машиночитаемом носителе для управления работой промышленной машины, в процессе которого принимает первый сигнал с первой видеокамеры, принимает второй сигнал с второй видеокамеры, анализирует по меньшей мере один из первого сигнала и второго сигнала для идентификации одного или нескольких контуров конструкции системы разработки длинными забоями впереди очистного комбайна либо в первом направлении перемещения очистного комбайна или во втором направлении перемещения очистного комбайна, генерирует профиль горной разработки с передним обзором на основе одного или нескольких контуров и управляет системой разработки длинными забоями на основе профиля горной разработки с передним обзором.
[09] При прочтении любых вариантов осуществления, описанных подробно, следует понимать, что варианты осуществления не ограничены в своем применении деталями конфигурации и устройством компонентов, изложенными в описании или показанными в прилагаемых чертежах. Варианты осуществления можно реализовать в других вариантах осуществления и применять на практике различными способами. Также понятно, что фразеология и терминология, применяемая в данном документе, служит для описания и не должна рассматриваться, как ограничивающая. Термины “включающий в себя,” “содержащий” или “имеющий” и их вариации в случае применения означают охват позиций, приведенных ниже в данном документе и их эквивалентов, а также дополнительных позиций. Термины “смонтированный”, “соединенный” “установленный” и “спаренный”, а также их вариации применяются в широком смысле и заключают в себе как прямой, так и непрямой монтаж, соединение, установку и спаривание.
[10] В дополнение, следует понимать, что варианты осуществления могут содержать агрегатное обеспечение, программное обеспечение, и электронные компоненты или модули, которые для рассмотрения можно иллюстрировать и описывать, как если большинство компонентов реализовано только в агрегатном обеспечении. Вместе с тем, специалисту в данной области техники на основе прочтения данного подробного описания понятно, что по меньшей мере в одном варианте осуществления, относящиеся к электронике аспекты можно реализовать в программном обеспечении (например, сохраненными на постоянном машиночитаемом средстве), исполняемом одним или несколькими блоками обработки данных, такими как микропроцессор и/или специализированные интегральные микросхемы (“ASIC”). При этом, следует отметить, что множество средств агрегатного обеспечения и программного обеспечения, а также множество отличающихся конструктивных компонентов можно использовать для реализации вариантов осуществления. Например, “серверы” и “вычислительные устройства”, описанные в спецификации, могут содержать один или несколько блоков обработки данных, один или несколько машиночитаемых модулей, один или несколько входных /выходных интерфейсов и различных соединений (например, системную шину) компонентов.
[11] Другие аспекты изобретения должны стать понятными из подробного описания и прилагаемых чертежей.
Краткое описание чертежей
[12] На фиг. 1 показана выемочная система вариантов осуществления, описанных в данном документе.
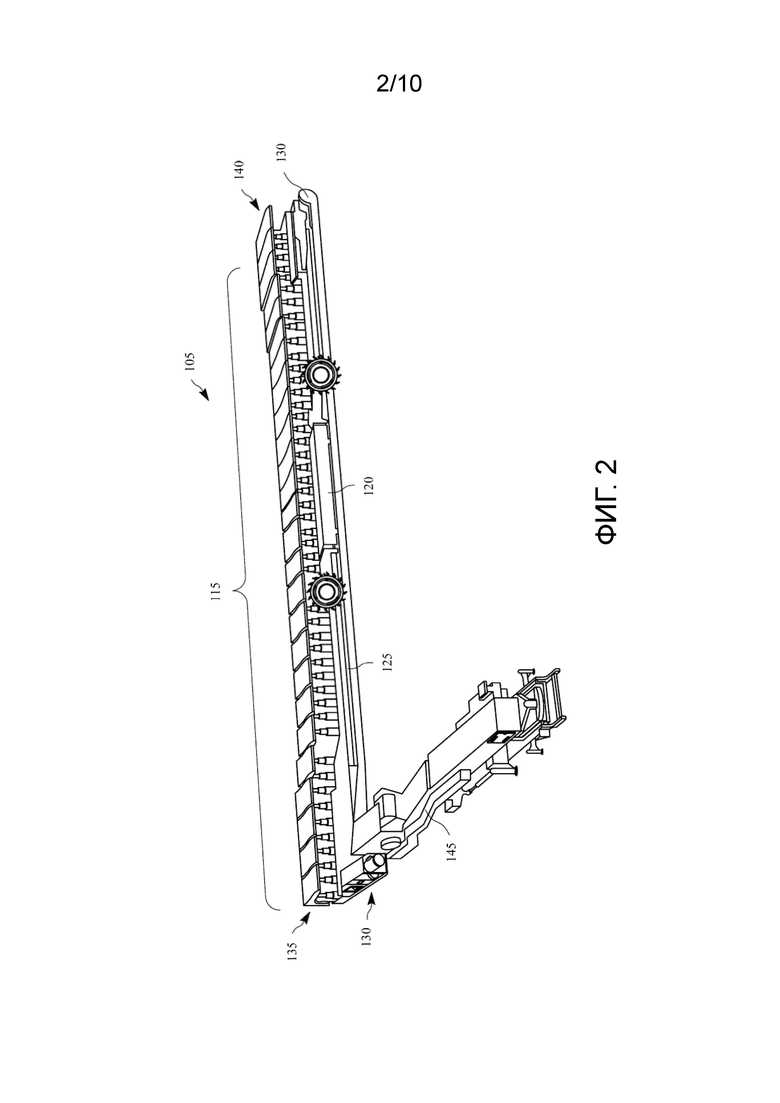
[13] На фиг. 2 и 3 показана система разработки длинными забоями выемочной системы фиг. 1 вариантов осуществления, описанных в данном документе.
[14] На фиг. 4A, 4B, и 4C показан очистной комбайн системы разработки длинными забоями фиг. 2 и 3 вариантов осуществления, описанных в данном документе.
[15] На фиг. 5 показана механизированная крепь системы разработки длинными забоями фиг. 2 и 3 вариантов осуществления, описанных в данном документе.
[16] На фиг. 6 показана видеокамера для применения в системе разработки длинными забоями фиг. 2 и 3 вариантов осуществления, описанных в данном документе.
[17] На фиг. 7 показана система мониторинга горной разработки вариантов осуществления, описанных в данном документе.
[18] На фиг. 8 показан контроллер для системы мониторинга горной разработки фиг. 7 вариантов осуществления, описанных в данном документе.
[19] На фиг. 9 показан способ управления системой разработки длинными забоями фиг. 2 и 3 вариантов осуществления, описанных в данном документе.
Описание предпочтительных вариантов осуществления изобретения
[20] Варианты осуществления, описанные в данном документе, относятся к управлению системой разработки длинными забоями на основе профиля горной разработки с передним обзором. Система разработки длинными забоями содержит множество элементов крепи, очистной комбайн и забойный скребковый конвейер (“AFC”). Одна или несколько видеокамер смонтированы на очистном комбайне, элементах крепи или на обоих, очистном комбайне и элементах крепи так, что одна или несколько видеокамер генерируют сигналы, относящиеся к области перед очистным комбайном (т.е., области впереди очистного комбайна в направлении его перемещения). Вместо опоры только на данные датчика прошедшего периода, относящиеся к перемещению очистного комбайна и управлению системой разработки длинными забоями на основе профиля с задним обзором горной разработки, контроллер применяет сигналы с одной или нескольких видеокамер для генерирования профиля горной разработки с передним обзором. Профиль горной разработки с передним обзором содержит один или несколько обнаруженных контуров конструкций, связанных с системой разработки длинными забоями. Один или несколько указанных контуров обнаруживают в сигналах изображения или видеосигналах, применяя методики распознавания контуров и обработки изображений оптического потока. На основе, например, формы обнаруженного контура и известных форм конструкций, связанных с системой разработки длинными забоями, контроллер способен идентифицировать конструкции впереди очистного комбайна. По обнаруженным контурам и структурам контроллер может затем идентифицировать, среди прочего, форму рештачного става или путь, которому должен следовать очистной комбайн при переходе AFC. Определенную форму рештачного става можно включать в состав профиля горной разработки с передним обзором и применять для управления системой разработки длинными забоями.
[21] На фиг. 1 показана выемочная система 100. Выемочная система 100 содержит систему 105 разработки длинными забоями и систему 110 мониторинга горной разработки. Выемочная система 100 выполнена с возможностью извлечения руды или продукции (например, угля) из горной выработки в эффективном режиме. Система 105 разработки длинными забоями физически извлекает руду из горной выработки. Система 110 мониторинга горной разработки осуществляет мониторинг работы системы 105 разработки длинными забоями для обеспечения сохранения эффективной выемки руды.
[22] На фиг. 2 показана система 105 разработки длинными забоями, содержащая элементы 115 крепи и очистной комбайн 120. Элементы 115 крепи соединены между собой параллельно рудному забою (см. фиг. 5) электрическими и гидравлическими соединениями. Элементы 115 крепи защищают очистной комбайн 120 от вышележащих геологических пластов. Число элементов 115 крепи, применяемых в системе 105 разработки длинными забоями, зависит от ширины разрабатываемого рудного забоя, поскольку элементы 115 крепи служат для защиты от пластов по всей ширине рудного забоя. Очистной комбайн 120 продвигается вдоль линии рудного забоя посредством AFC 125, имеющего выделенную зубчатую рейку для перемещения очистного комбайна 120 параллельно рудному забою между самим забоем и элементами 115 крепи. AFC 125 также содержит конвейер параллельный зубчатой рейке для очистного комбайна, вырубленная руда падает на конвейер для транспортировки от забоя. Конвейер и зубчатую рейку AFC 125 приводят в действие привода 130 AFC, расположенные на основном штреке 135 и хвостовом штреке 140, находящихся на дальних концах AFC 125. Привода 130 обеспечивают AFC 125 непрерывную транспортировку руды к основному штреку 135 (слева на фиг. 2). Привода 130 AFC также обеспечивают перемещение очистного комбайна 120 в двух направлениях вдоль зубчатой рейки AFC 125 и поперек рудного забоя. В некоторых вариантах осуществления, в зависимости от конкретной конфигурации горной выработки, конфигурация системы 105 разработки длинными забоями может отличаться от описанной выше. Например, основной штрек 135 может располагаться на правом дальнем конце AFC 125, и хвостовой штрек 140 может располагаться на левом дальнем конце AFC 125. Система 105 разработки длинными забоями также содержит консольный перегружатель (“BSL”) 145, расположенный перпендикулярно AFC 125 в основном штреке 135.
[23] На фиг. 3 показана в изометрии система 105 разработки длинными забоями и расширенный вид консольного перегружателя (далее BSL) 145. Когда извлеченная руда, транспортируемая AFC 125, достигает основного штрека 135, ее направляют с поворотом в 90° на BSL 145. В некоторых случаях BSL 145 стыкуется с AFC 125 под тупым углом (например, не прямым углом). BSL 145 затем готовит и грузит руду на конвейер основного штрека (не показано), который транспортирует руду на поверхность. Руду готовят к погрузке посредством дробилки или грохота 150, который дробит руду для улучшения погрузки на конвейер основного штрека. Аналогично конвейеру AFC 125, конвейер BSL 145 приводится в действие приводом 155 BSL.
[24] На фиг. 4A, 4B и 4C показан очистной комбайн 120. Очистной комбайн 120 содержит удлиненный центральный кожух 200, в котором находятся органы управления для очистного комбайна 120. Подкладные башмаки 205 и отделяющие башмаки 210 (фиг. 4B) проходят под кожухом 200. Полозы-башмаки 205 несут очистной комбайн 120 на забойной стороне AFC 125 (т.e., стороне ближайшей к рудному забою), и останавливающие башмаки 210 несут очистной комбайн 120 на завальной стороне AFC 125. Конкретно, останавливающие башмаки 210 и звездочки откатки зацепляют зубчатую рейку AFC 125 для обеспечения перемещения очистного комбайна 120 вдоль AFC 125 и рудного забоя. Вбок от кожуха 200 выступают правый и левый поворотные редукторы 215 и 220, соответственно, которые поднимаются и опускаются гидравлическими цилиндрами, прикрепленными к поворотным редукторам 215, 220 и кожуху 200. На дальнем конце правого поворотного редуктора 215 (относительно кожуха 200) расположен правый режущий барабан 225, и на дальний конце левого поворотного редуктора 220 расположен левый режущий барабан 230. Каждый режущий барабан 225, 230 приводится в действие электрическим двигателем 235, 240 через зубчатую передачу в поворотном редукторе 215, 220. Каждый из режущих барабанов 225, 230 имеет множество породоразрушающих элементов 245 (например, резцов), которые абрадируют рудный забой, при вращении режущих барабанов 225, 230, при этом срезая руду. Породоразрушающие элементы 245 также снабжены распыляющими соплами, которые распыляют текучую среду во время разработки для диспергирования токсичных и/или горючих газов, которые выделяются на площадке разработки, подавляют пыль и улучшают охлаждение. На фиг. 4B показан вид сбоку очистного комбайна 120, содержащего режущие барабаны 225, 230, поворотные редукторы 215, 220, останавливающие башмаки 210 и кожух 200. На фиг. 4B также показан левый откатной двигатель 250 и правый откатной двигатель 255.
[25] Очистной комбайн 120 также содержит различные датчики, например, для обеспечения автоматического управления очистным комбайном 120. Например, очистной комбайн 120 содержит инклинометр 260 левого поворотного редуктора, инклинометр 265 правого поворотного редуктора, датчики 270 левой откаточной лебедки, датчики 275 правой откаточной лебедки и датчик 280 угла продольного и поперечного крена. На фиг. 4C показаны приблизительные местоположения различных датчиков. Понятно, что датчики можно установить в других местах на очистном комбайне 120. Инклинометры 260, 265 обеспечивают информацию, касающуюся угла наклона поворотных редукторов 215, 220. Положение поворотного редуктора можно также измерять посредством линейных измерительных преобразователей, смонтированных между каждым поворотным редуктором 215, 220 и кожухом 200. Датчики 270, 275 откатных лебедок обеспечивают информацию, касающуюся положения очистного комбайна 120 по длине AFC 125, а также скорости и направления перемещения очистного комбайна 120. Датчик 280 угла продольного и поперечного крена обеспечивает информацию, касающуюся углового смещения кожуха 200. Как показано на фиг. 4C, продольный крен очистного комбайна 120 относится к углу наклона к рудному забою и от него, а поперечный крен очистного комбайна 120 относится к угловому смещению между правой стороной очистного комбайна 120 и левой стороной очистного комбайна 120, как ясно показано осями на фиг. 4C. Оба, продольный крен и поперечный крен очистного комбайна 120 можно измерять в градусах. Положительный продольный крен относится к наклону очистного комбайна 120 от рудного забоя (т.е., забойная сторона очистного комбайна 120 выше завальной стороны очистного комбайна 120), а отрицательный продольный крен относится к наклону очистного комбайна 120 к рудному забою (т.е., забойная сторона очистного комбайна 120 ниже завальной стороны очистного комбайна 120). Положительный поперечный крен относится к наклону очистного комбайна 120, при котором правая сторона очистного комбайна 120 выше левой стороны очистного комбайна 120, а отрицательный поперечный крен относится к наклону очистного комбайна 120, при котором правая сторона ниже левой стороны очистного комбайна 120. Датчики обеспечивают информацию для определения относительного положения очистного комбайна 120, правого режущего барабана 225, и левого режущего барабана 230.
[26] На фиг. 5 показана система 105 разработки длинными забоями на виде вдоль линии рудного забоя 300. Крепь 115 показана защищающей очистной комбайн 120 от вышележащих пластов перекрывающим козырьком 305 крепи 115. Козырек 305 вертикально смещается (т.е., перемещается к пластам и от них) гидравлическими стойками 310, 315. Левая и правая гидравлические стойки 310, 315 содержат текучую среду под давлением для несения козырька 305. Козырек 305 оказывает воздействие направленными вверх силами в некотором диапазоне на геологические пласты, благодаря приложению давления отличающейся величины в гидравлических стойках 310, 315. На забойном конце козырька 305 смонтирован дефлектор или подпорка 320, показанная в положении с упором в забой на фиг. 5. Подпорку 320 можно также полностью выдвинуть гидроцилиндром 325 подпорки. Прикрепленный к базе 335 гидроцилиндр 330 продвижения вперед обеспечивает продвижение крепи 115 к рудному забою 300, когда слои руды срезаются, для создания крепи новых вскрытых пластов. Гидроцилиндр 330 продвижения вперед также обеспечивает проталкивание AFC 125 крепью 115 к рудному забою 300.
[27] Как показано на фиг. 4B, 4C и 5, система 105 разработки длинными забоями может также содержать одну или несколько видеокамер для визуального мониторинга системы 105 разработки длинными забоями. Например, показанный на фиг. 4B и 4C очистной комбайн 120 содержит первую видеокамеру 400 и вторую видеокамеру 405. Первая видеокамера 400 направлена на левую сторону очистного комбайна 120 и на левый режущий барабан 230. При этом, первая видеокамера 400 направлена на рудный забой 300, связанный с системой 105 разработки длинными забоями слева от очистного комбайна 120. Вторая видеокамера 405 направлена на правую сторону очистного комбайна 120 и на правый режущий барабан 225. При этом, вторая видеокамера 405 направлена на рудный забой 300, связанный с системой 105 разработки длинными забоями справа от очистного комбайна 120. В отличие от других датчиков, связанных с системой 105 разработки длинными забоями (например, инклинометров 260, 265, датчиков 270, 275 откатных лебедок, датчика 280 угла продольного и поперечного крена и т.д.), которые обеспечивают информацию, относящуюся к текущему и/или предыдущему состоянию очистного комбайна 120, видеокамеры 400, 405 дают информацию обзора вперед. В некоторых вариантах осуществления видеокамеры 400, 405 применяются в комбинации с инклинометром 260 левого поворотного редуктора, инклинометром 265 правого поворотного редуктора, датчиками 270 левой откаточной лебедки, датчиками 275 правой откаточной лебедки, и датчиком 280 угла продольного и поперечного крена для анализа обеих, данных пройденного пути, относящихся к очистному комбайну 120 и рудному забою 300 и данных переднего обзора.
[28] Видеокамеры 400, 405 обеспечивают информацию, относящуюся к горизонту очистного комбайна 120 и рештачному ставу AFC 125. Рештачный став AFC 125 представляет плоскость пола AFC 125 и соответствует пути, по которому следует очистной комбайн, 120 когда пересекает AFC 125. Соответственно, вместо реагирования на состояние или форму рештачного става, видеокамеры 400, 405 обеспечивают упреждающий подход компенсации для состояния или формы рештачного става.
[29] Дополнительно или альтернативно, одну или несколько видеокамер можно установить на такую крепь, как крепь 115 фиг. 5. На фиг. 5 крепь 115 показана содержащей видеокамеру 410 и видеокамеру 415. Каждую видеокамеру 410, 415 можно ориентировать так, что видеокамера направлена на рудный забой 300 и/или на рештачный став. Видеокамеры 410, 415 показаны с обоими обозначениями, точкой и крестом, указывающими, что по отношению к плоскости фиг. 5, видеокамеры 410, 415 можно направить внутрь фиг. 5 (т.е., для обзора правой стороны очистного комбайна 120 и рештачного става) или направить наружу фиг. 5 (т.е., для обзора левой стороны очистного комбайна 120 и рештачного става). В вариантах осуществления, которые содержат видеокамеры 410, 415, смонтированные на крепи 115, можно смонтировать дополнительные видеокамеры на дополнительных элементах крепи (например, через регулярные интервалы) так, что можно вести мониторинг всего рештачного става, вне зависимости от положения очистного комбайна 120. Видеокамеры 400, 405 на очистном комбайне 120 и видеокамеры 410, 415 на крепи 115 можно применять раздельно или в комбинации друг с другом в системе 105 разработки длинными забоями. В результате, система 105 разработки длинными забоями может с упреждением управлять очистным комбайном 120 и/или элементами 115 крепи на основе состояния или формы рештачного става впереди очистного комбайна 120 при перемещении очистного комбайна по рудному забою 300.
[30] На фиг. 6 показана с увеличением одна из видеокамер 400, 405, 410, 415. Как показано на фиг. 6, каждая из видеокамер 400, 405, 410, 415 может содержать корпус 420 видеокамеры, окно или линзу 425 и датчик 430 видеокамеры. Корпус 420 видеокамеры служит для защиты датчика 430 видеокамеры от грязи, отходов и повреждения от окружающей среды горной разработки. В некоторых вариантах осуществления корпус 420 видеокамеры имеет взрывобезопасное (“XP”) и/или искробезопасное (“IS”) исполнение. Линза 425 также обеспечивает защиту датчика 430 видеокамеры. Вместе с тем, поскольку линза 425 является прозрачной, то линза 425 может покрываться грязью или отходами, ограничивающими видимость для датчика 430 видеокамеры. В некоторых вариантах осуществления, например, на очистном комбайне 120 можно применять приспособления для направление воздушного потока поверх линзы 425 одной или нескольких видеокамер 400, 405, 410, 415. Воздушный поток поверх линзы 425 служит для отделения и удаления грязи или отходов, скапливающихся на линзе 425. Дополнительно или альтернативно, можно применять водяную помпу или гидромонитор для набрызгивания воды на линзу 425 для очистки линзы 425 от грязи или отходов.
[31] Датчик 430 видеокамер 400, 405, 410, и 415 может представлять собой датчик видимого света, датчик инфракрасного света, и т.д. В некоторых вариантах осуществления датчик 430 видеокамеры способен обнаруживать оба, видимый свет и инфракрасный свет, или датчик 430 видеокамеры содержит многочисленные датчики, при этом один датчик способен обнаруживать видимый свет, и второй датчик способен обнаруживать инфракрасный свет. В некоторых вариантах осуществления одна или несколько видеокамер 400, 405, 410, 415 содержит оптический датчик для измерения количества света в окрестности одной или нескольких видеокамер 400, 405, 410, 415. Если оптический датчик обнаруживает адекватное количество света (например, равное или большее пороговой мощности излучения) в окрестности одной или нескольких видеокамер 400, 405, 410, 415, одна или несколько видеокамер 400, 405, 410, 415 проводят измерения, применяя датчик видимого света. Если оптический датчик обнаруживает неадекватное количество света (например, ниже пороговой мощности излучения) в окрестности одной или нескольких видеокамер 400, 405, 410, 415, одна или несколько видеокамер 400, 405, 410, 415 проводят измерения, применяя датчик инфракрасного света или датчик видимого света в комбинации с датчиком инфракрасного света. В некоторых вариантах осуществления инфракрасное изображение можно накладывать на изображение в видимом свете для создания улучшенного изображения.
[32] На фиг. 7 показана система 500 мониторинга горной разработки, которую можно применять для обнаружения проблем, возникающих в подземной системе управлении разработкой длинным забоем или контроллере 505, и реагирования на указанные проблемы. Контроллер 505, например, расположен на месте разработки, содержит различные компоненты и управляет очистным комбайном 120. В некоторых вариантах осуществления контроллер 505 также содержит различные компоненты и органы управления элементами 115 крепи, AFC 125 и т.п. Контроллер 505 поддерживает связь с подземным компьютером или интерфейсом 510 пользователя и компьютером на поверхности или сервером 520 через сетевой коммутатор 515, оба из которых можно расположить на месте разработки. Компьютер 520 на поверхности, кроме того, поддерживает связь с компьютером 530 дистанционного мониторинга по сети 525. Компьютер 530 дистанционного мониторинга можно выполнить с возможностью обработки данных, принимаемых с компьютера 520 на поверхности и/или через сетевой коммутатор 515 с контроллера 505.
[33] Каждый из компонентов в системе 500 мониторинга горной разработки может иметь двустороннюю связь. Каналы связи между любыми двумя компонентами системы 500 мониторинга горной разработки могут быть проводными (например, по кабелям Ethernet), беспроводными (например, через WiFi®, сотовыми по протоколам Bluetooth®) или их комбинацией. Хотя только подземная система разработки длинными забоями и один сетевой коммутатор показаны на фиг. 7, дополнительные горные машины, как подземные, так и наземные (и альтернативные разработке длинными забоями) могут соединяться c компьютером 520 на поверхности через сетевой коммутатор 515. Аналогично, дополнительные сетевые коммутаторы или соединения можно включать в состав для обеспечения альтернативных каналов связи между контроллером 505 и компьютером 520 на поверхности.
[34] Система 500 мониторинга горной разработки и контроллер 505 показаны на фиг. 8 и описаны более подробно ниже. Контроллер 505 электрически и/или средством связи соединен с разнообразными модулями или компонентами системы 105 разработки длинными забоями. Например, контроллер 505 соединен с подземным компьютером или интерфейсом 510 пользователя, сетевым коммутатором 515, компьютером на поверхности или сервером 520 (через сетевой коммутатор 515), сетью 525 (через сетевой коммутатор 515), модулем 535 электропитания (например, модулем электропитания переменного тока, потребляющим переменный ток из сети), одним или несколькими датчиками 540, относящимися к системе 105 разработки длинными забоями, базой 545 данных (например, для сохранения изображений или видеоинформации, относящихся к системе 105 разработки длинными забоями, профилям компонентов и т.д.), первой видеокамерой 550 и второй видеокамерой 555. Хотя только первая видеокамера 550 и вторая видеокамера 555 показаны для системы 500 мониторинга горной разработки, можно включать в состав дополнительные видеокамеры. Например, система мониторинга может содержать каждую из видеокамер 400, 405, 410, и 415. В некоторых вариантах осуществления больше четырех видеокамеры включены в состав в системе 500 мониторинга горной разработки, и число видеокамер, включенных в состав в системе 500 мониторинга горной разработки, варьируется на основе размера рудного забоя 300.
[35] Контроллер 505 содержит комбинации агрегатного обеспечения и программного обеспечение, служащие, кроме прочего, для управления работой системы 105 разработки длинными забоями, поддержания связи с компьютером 520 на поверхности или сетью 525, обнаружения рештачного става системы 105 разработки длинными забоями, генерирования профиля горной разработки с передним обзором и т.д. В некоторых вариантах осуществления контроллер 505 содержит множество электрических и электронных компонентов, которые обеспечивают питание, управление работой и защиту компонентам и модулям в контроллере 505 и/или системе 105 разработки длинными забоями. Например, контроллер 505 содержит, помимо прочего, блок 560 обработки данных (например, микропроцессор, микроконтроллер, или другое подходящее программируемое устройство), запоминающее устройство 565, блоки 570 ввода и блоки 575 вывода. Блок 560 обработки данных содержит, помимо прочего, блок 580 управления, арифметическое логическое устройство (“ALU”) 585 и множество регистрирующих устройств 590 (показаны, как группа регистрирующее устройств на фиг. 8) и реализован с применением известной компьютерной архитектуры (например, модифицированной гарвардской архитектуры, фон-неймановской архитектуры и т.д.). Блок 560 обработки данных, запоминающее устройство 565, блоки 570 ввода и блоки 575 вывода, а также различные модули, соединяющиеся с контроллером 505, соединяются посредством одной или нескольких управляющих шин и/или информационными шинами (например, обычной шиной 595). Управляющие и/или информационные шины показаны на фиг. 8 для иллюстрации. Применение одной или нескольких управляющих и/или информационных шин, служащих для соединения между собой и поддержания связи между различными модулями и компонентами, известно специалисту в данной области техники, применительно к изобретению, описанному в данном документе.
[36] Запоминающее устройство 565 является постоянным машиночитаемым носителем и содержит, например, область сохранения программ и область сохранения данных. Область сохранения программ и область сохранения данных могут содержать комбинации запоминающих устройств отличающихся типов, таких как ROM, RAM (например, DRAM, SDRAM, и т.д.), EEPROM, флэш ПЗУ, накопитель на жестком диске, карта памяти SD или других подходящих магнитных, оптических, физических или электронных запоминающих устройств. Блок 560 обработки данных соединяется с запоминающим устройством 565 и исполняет команды программного обеспечения, которое сохраняется в RAM запоминающего устройства 565 (например, во время исполнения), ROM запоминающего устройства 565 (например, в общем на постоянном основе) или других постоянных машиночитаемых носителей, таких как другие запоминающие устройства или диски. Программное обеспечение в составе системы 105 разработки длинными забоями может сохраняться в запоминающем устройстве 565 контроллера 505. Программное обеспечение содержит, например, встроенное программное обеспечение, одну или несколько прикладных программ, программные данные, фильтры, масштабные линейки, один или несколько программных модулей, программное обеспечение обработки изображения оптического потока, алгоритм обнаружения контура (например, одновременной локализации и картографирования, “SLAM”) и других исполняемых программ. Контроллер 505 выполнен с возможностью извлечения из запоминающего устройства 565 и исполнения, помимо прочего, команд, относящихся к способам управления и способам, описанным в данном документе. В других конструкциях контроллер 505 содержит дополнительные компоненты, меньше компонентов или отличающиеся компоненты. В некоторых вариантах осуществления программное обеспечение, включенное в состав для реализации системы 105 разработки длинными забоями, можно сохранять в запоминающем устройстве компьютера 520 на поверхности или компьютера 530 дистанционного мониторинга. В таких вариантах осуществления компьютер 520 на поверхности или компьютер 530 дистанционного мониторинга выполнен с возможностью извлечения из запоминающего устройства и исполнения команд, относящихся к способам управления и способам, описанным в данном документе (например, программное обеспечение обработки изображения оптического потока, алгоритм обнаружения контуров и т.д.).
[37] Датчики 540 включают в себя инклинометр 260 левого поворотного редуктора, инклинометр 265 правого поворотного редуктора, датчики 270 левой откаточной лебедки, датчики правой откаточной лебедки 275 и датчик 280 угла продольного и поперечного крена, описанные выше показанные на фиг. 4C. Данные датчики 540 могут применяться контроллером 505 в режиме обзора вперед для характеризации текущего и/или прошедшего состояния очистного комбайна 120 или рештачного става, связанных с системой 105 разработки длинными забоями. Такая система разработки длинными забоями с обзором вперед описана в Патенте США 9,726,017, выданном 8 августа 2017 г. под названием “HORIZON MONITORING FOR LONGWALL SYSTEM”, содержание которого полностью включено в данном документе в виде ссылки. Вместе с тем, контроллер 505 может также применять видеокамеры 550 и 555 в режиме с передним обзором для характеризации будущего состояния рештачного става, связанного с системой 105 разработки длинными забоями, с которым очистному комбайну 120 предстоит работать.
[38] Видеокамеры 550, 555 захватывают изображения или видеоинформацию областей вблизи очистного комбайна 120 или элементов 115 крепи. В вариантах осуществления, где видеокамеры 550, 555 смонтированы на очистном комбайне 120, контроллер 505 определяет направление движения очистного комбайна 120. Контроллер 505 выполнен с возможностью анализа на основе направления движения очистного комбайна 120 изображений или видеоинформации, захваченных одной из видеокамер 550, 555. В некоторых вариантах осуществления на основе направления движения очистного комбайна 120, контроллер 505 избирательно включает одну из видеокамер 550, 555 и выключает другую видеокамеру, при этом контроллер 505 принимает изображения или видеосигналы с одной из видеокамер 550, 555. В других вариантах осуществления контроллер 505 принимает сигналы изображения или видеосигналы с каждой из видеокамер 550, 555 и может игнорировать сигналы, принятые с одной из видеокамер 550, 555, обращенных назад от текущего направления перемещения очистного комбайна 120. Игнорирование сигналов с одной из видеокамер 550, 555 содержит, например, удаление сигналов, исключение обработки сигналов, не выполнение обнаружения контуров или обработки изображения оптического потока с применением сигналов, или исключение управления системой 105 разработки длинными забоями на основе сигналов. Поскольку очистной комбайн 120 перемещается только в одном направлении единовременно, только одна из видеокамер 550, 555 направленная вперед или обзора вперед требуется для оценки предстоящего рештачного става, с которым очистному комбайну 120 предстоит работать, и генерирования профиля горной разработки с передним обзором.
[39] В вариантах осуществления, где видеокамеры 550, 555 смонтированы на крепи 115, контроллер 505 может определять положение и направление движения очистного комбайна 120 на основе изображений или видеоинформации, принятых с многочисленных видеокамер. В других вариантах осуществления контроллер 505 определяет положение и направление движения очистного комбайна 120 на основе данных других датчиков, связанных с очистным комбайном 120. Например, в вариантах осуществления, где видеокамеры 550, 555 смонтированы на крепи 115, множество видеокамер 550, 555 включено в состав системы 105 разработки длинными забоями для обеспечения возможности захвата всей длины AFC 125. Изображения или видеоинформация с каждой видеокамеры в составе в системы 105 разработки длинными забоями можно оценивать для определения положения и направления движения очистного комбайна 120 вдоль AFC 125. В некоторых вариантах осуществления можно применять алгоритм обработки изображения для обнаружения положения очистного комбайна 120 по одному или нескольким изображениям или одному или нескольким видеопотокам с видеокамер 550, 555. Например, контроллер 505 содержит выполняемые компьютером команды для обнаружения контуров и обработки изображения оптического потока в одном или нескольких изображениях или видеопотоках. В некоторых вариантах осуществления контроллер 505 выполнен с возможностью реализации методики обнаружения SLAM (например, для обнаружения отличий между прогнозируемой формой очистного комбайна и обнаруженной формой очистного комбайна). В других вариантах осуществления посредством контроллера 505 можно реализовать другие методики распознавания контура, такие как с экономным детектором контура или другим способом обнаружения контуров первого порядка, способом обнаружения контуров второго порядка (например, отличающихся методик), конгруэнтности фаз, фазового растягивающего преобразования и т.д. Контроллер 505 применяет обработку изображения оптического потока, например, для вычисления движения пикселей от одного изображения или рамы изображения к следующему изображению или раме изображения. Пиксельные изменения от изображения или рамы изображения обеспечивают контроллеру отслеживание движения компонентов системы 105 разработки длинными забоями. Контроллер 505 может быть выполнен с возможностью реализации одной или нескольких методик обработки изображения оптического потока, таких как способ фазовой корреляция, способ на блочной основе, дифференциальный способ (например, способ Хорн-Шанка, способ Бакстон-Бакстона, способ Блэк-Джепстона и т.д.), или способы дискретной оптимизации.
[40] Методика анализа изображения или видеоинформации реализуемая посредством контроллера 505 разрабатывается на заказ или специально для системы разработки длинными забоями, такой как система 105. В результате, контроллер 505 способен реализовать методику анализа изображения или видеоинформации для идентификации частных признаков системы 105 разработки длинными забоями. Как описано выше, в некоторых вариантах осуществления контроллер 505 выполнен с возможностью обнаруживать очистной комбайн 120 в дополнение к обнаружению рештачного става. Например, кожух 200 имеет унифицированную форму, даже когда поворотные редукторы 215, 220 являются шарнирно-сочлененными. Контроллер 505 принимает сигналы изображения или видеосигналы с видеокамер 550, 555, обнаруживает контуры в захваченном сигналах изображения или видеосигналах и сравнивает обнаруженные формы контуров с известной геометрией или конструкцией кожуха 200. В некоторых вариантах осуществления в запоминающем устройстве 565 или базе 545 данных сохраняется одна или несколько моделей внешнего вида кожуха 200 (или любого другого компонента системы 105 разработки длинными забоями) для сравнения с обнаруженными контурами. В результате, контроллер 505 выполняют с возможностью обнаруживать один или множество объектов в системе 105 разработки длинными забоями для идентификации местоположения объектов или обнаружения формы рештачного става. Контроллер 505 может также обнаруживать характер изменений одного или множества объектов от изображения к изображению, применяя обработку изображения оптического потока.
[41] В вариантах осуществления, где видеокамеры 550, 555 обращены на рудный забой 300, видеокамеры 550, 555, нацеленные в направлении движения очистного комбайна 120 (т.е., видеокамеры переднего обзора) генерируют сигналы, принимаемые контроллером 505. Контроллер обрабатывает и анализирует сигналы с видеокамер 550, 555 как описано выше, выполняя обнаружение контуров для идентификации компонентов или элементов системы 105 разработки длинными забоями. Например, контроллер 505 можно выполнить с возможностью идентификации индивидуальных сегментов (например, состыкованных снабженных гребнями сегментов) AFC 125 или верхнего контура лотков, препятствующих рассыпанию. AFC 125 следует рештачному ставу горной разработки, когда рештачный став поднимается и опускается (т.е., в вертикальном направлении Z, см. фиг. 5) или стремится к элементам 115 крепи или от них (т.е., в горизонтальном направлении Y [см. фиг. 5]).
[42] Контроллер 505 выполнен с возможностью определения формы рештачного става, с которым очистной комбайн 120 должен вскоре работать, из комбинации нескольких сегментов AFC 125. Дополнительно или альтернативно, контроллер 505 выполнен с возможностью идентификации козырька 305 каждого элемента крепи 115. Аналогично сегментам AFC 125, элементы крепи могут следовать рештачному ставу рудного забоя 300. Идентифицируя границы козырька 305 и объединяя несколько козырьков вместе, контроллер 505 способен определять форму рештачного става, с которой очистной комбайн 120 вскоре должен работать. Сегменты AFC 125 и козырька 305 крепи 115 представлены, как иллюстративные примеры элементов, которые контроллер 505 может использовать для идентификации рештачного става рудного забоя 300 впереди очистного комбайна 120. В некоторых вариантах осуществления дополнительные или отличающиеся элементы системы 105 разработки длинными забоями можно применять отдельно или в комбинации для обнаружения рештачного става, когда элементы следуют рештачному ставу и, например, их можно успешно идентифицировать на отрезке длины рудного забоя 300. В некоторых вариантах осуществления определенную форму рештачного става можно также сравнивать с ранее изображенной версией рештачного става, при этом контроллер 505 может определять изменения в рештачном ставе в сравнении с предыдущими циклами работы очистного комбайна.
[43] Когда очистной комбайн 120 достигает конца AFC 125, очистным комбайном 120 управляют для перемещения в противоположном направлении вдоль AFC 125. В результате, в вариантах осуществления, где видеокамеры 550, 555 смонтированы на очистном комбайне 120, контроллер 505 может переключаться между видеокамерами 550, 555, чтобы снова обрабатывать и анализировать изображения или видеосигналы с одной из видеокамер 550, 555, нацеленной в направлении движения очистного комбайна 120.
[44] На фиг. 9 показан способ 600 управления системой 105 разработки длинными забоями. Способ 600 начинается с работы системы 105 разработки длинными забоями и контроллера 505, генерирующих один или несколько управляющих сигналов для очистного комбайна 120 системы 105 разработки длинными забоями (этап 605). Управляющие сигналы включают в себя, например, сигналы, относящиеся к очистному комбайну 120, перемещающемуся вдоль AFC 125. Когда контроллер 505 управляет очистным комбайном 120, контроллер 505 принимает сигналы с множества датчиков (этап 610). Сигналы с датчиков включают в себя сигналы, помимо прочего, с инклинометра 260 левого поворотного редуктора, инклинометра 265 правого поворотного редуктора, датчиков 270 левой откаточной лебедки, датчиков правой откаточной лебедки 275 и датчика 280 угла продольного и поперечного крена. Контроллер 505 выполнен с возможностью применения данных принятых сигналов для управления работой очистного комбайна 120 и/или генерирования профиля горной разработки, связанного с системой 105 разработки длинными забоями. Профиль горной разработки, генерируемый посредством контроллера 505, может содержать профиль рештачного става, профиль резания кровли, профиль резания пола, профиль продольного крена, вертикальный профиль или т.п. Такие профили, генерируемые посредством контроллера 505, соответствуют данным датчика за прошедший период, которые были приняты контроллером 505 и скомпилированы в требуемый профиль (профили). Вместе с тем, данные профили основаны на заднем обзоре поскольку представляют прошлую работу очистного комбайна 120 (например, профиль для предыдущего цикла работы очистного комбайна 120, перемещавшегося вдоль AFC 125).
[45] Контроллер 505 также выполнен с возможностью управления работой системы 105 разработки длинными забоями в режиме переднего обзора. Контроллер 505 принимает одно или несколько изображений или видеосигналов с видеокамер 550, 555 (этап 615). Контроллер анализирует сигналы изображения или видеосигналы с видеокамер 550, 555 как описано выше для обнаружения, например, контура одного или нескольких компонентов системы 105 разработки длинными забоями (например, элементов 115 крепи, очистного комбайна 120, AFC 125 и т.д.) (этап 620). На основе анализа сигналов изображения или видеосигналов с видеокамер 550, 555 контроллер 505 генерирует профиль горной разработки по переднего обзора (этап 625). Профиль горной разработки переднего обзора содержит, например, визуальное представление рештачного става. Визуальное представление можно выводить на дисплей (например, на подземном компьютере 510 или компьютере 530 дистанционного мониторинга) или можно оставлять в форме данных для обработки и управления посредством контроллера 505. В некоторых вариантах осуществления профиль горной разработки переднего обзора может также включают в себя профиль резания кровли переднего обзора, профиль резания пола переднего обзора, профиль продольного крена переднего обзора, вертикальный профиль переднего обзора, и т.д. Профили переднего обзора различных типов можно включать в генерируемый профиль горной разработки переднего обзора, можно генерировать способом, описанным выше, посредством обнаружения контура различных компонентов системы 105 разработки длинными забоями. Например, профиль резания кровли можно генерировать на основе обнаруженных контуров элементов 115 крепи, и профиль рештачного става можно генерировать на основе обнаруженного контура AFC 125. Профиль горной разработки переднего обзора, генерируемый посредством контроллера 505, может также содержать вычисленные или оцененные параметры системы 105 разработки длинными забоями. Например, параметры системы разработки длинными забоями, которые можно определить из профиля переднего обзора содержат параметр ступени пола, параметр выемки, параметр продольного крена, параметр изменения поперечного крена и т.д. для участка рудного забоя 300 с которым очистному комбайну 120 предстоит работать. Данные и другие параметры, связанные с системой разработки длинными забоями, описанный в патенте США 9,726,017, содержание которого полностью включено в данный документ в виде ссылки.
[46] В отличие от систем разработки длинными забоями заднего обзора, система разработки длинными забоями переднего обзора, где применяют видеокамеры 550, 555 способна с упреждением управлять системой 105 разработки длинными забоями на основе предстоящей комбайну 120 работы (т.е., не только на основе работы уже выполненной очистным комбайном). Например, профиль горной разработки переднего обзора может содержать параметр ступени пола, относящийся к будущим изменениям отметки рештачного става. Системы разработки длинными забоями, в которых информация передается обзора вперед, могут только реагировать на данные изменения, предупреждая оператора, что изменение отметки уже произошло и, например, меньше руды было извлечено, чем требовалось. Профиль переднего обзора можно применять для генерирования одного или несколько управляющих сигналов (этап 630) для управления работой системы 105 разработки длинными забоями (этап 635).
[47] Управляющие сигналы содержат управляющие сигналы для элементов 115 крепи, очистного комбайна 120, AFC 125 и т.д. Например, профиль горной разработки переднего обзора применяется контроллером 505 для управления высотой или продвижением вперед элементов 115 крепи впереди очистного комбайна 120. Профиль горной разработки переднего обзора можно также применять для управления правым поворотным редуктором 215, правым режущим барабаном 225, левым поворотным редуктором 220 и левым режущим барабаном 230 для более эффективного удаления руды из рудного забоя 300. Профиль горной разработки переднего обзора можно также применять для управления AFC 125 (например, скорости вращения привода 130 AFC) для более эффективного удаления руды из горной разработки (например, на основе прогнозируемого объема извлекаемой руды). Управление элементами 115 крепи, очистным комбайном 120 и AFC 125 на основе профиля горной разработки переднего обзора является примером управления для системы 105 разработки длинными забоями. Вместе с тем, другими компонентами системы 105 разработки длинными забоями также можно управлять на основе профиля горной разработки переднего обзора (например, BSL 145, дробилкой или грохотом 150, и т.д.). Кроме того, этапы способа 600 показаны в являющемся примером порядке. Вместе с тем, различные этапы показанного способа 600 можно удалять из способа 600 или выполнять в порядке, отличающемся от частного порядка, показанного на фиг. 9. Например, способ 600 можно модифицировать так, чтобы сигналы с датчиков 540 и сигналы с видеокамер 550, 555 принимать и обрабатывать контроллером 505 перед управлением очистным комбайном 120 для перемещения вдоль AFC 125.
[48] Таким образом, варианты осуществления, описанные в данном документе, предлагают, помимо прочего, системы и способы управления системой разработки длинными забоями на основе профиля горной разработки переднего обзора. Различные признаки и преимущества изобретения изложены в следующей формуле изобретения.









Изобретение относится к горному делу и может быть использовано для разработки длинными забоями рудного пласта. Техническим результатом является обеспечение выдерживания горизонта в системе разработки длинными забоями с возможностью эффективной выемки руды. В частности, предложена система разработки длинными забоями, содержащая: скребковый конвейер; очистной комбайн, выполненный с возможностью перемещения вдоль забойного скребкового конвейера в первом направлении или втором направлении. Причем очистной комбайн содержит кожух очистного комбайна, первый режущий барабан, проходящий в первом направлении от кожуха очистного комбайна, и второй режущий барабан, проходящий во втором направлении от кожуха очистного комбайна. Кроме того, система содержит первую камеру, выполненную с возможностью генерирования первого сигнала, связанного с первым направлением перемещения для очистного комбайна, и вторую камеру, выполненную с возможностью генерирования второго сигнала, связанного с вторым направлением перемещения для очистного комбайна, и контроллер, содержащий постоянный машиночитаемый носитель и процессор. Причем контроллер содержит выполняемые компьютером команды, сохраняемые в машиночитаемом носителе, для управления работой системы разработки длинными забоями с возможностью приема первого сигнала с первой камеры, приема второго сигнала со второй камеры, анализа указанных сигналов для идентификации контуров конструкции системы разработки длинными забоями впереди очистного комбайна в любом из направлений, генерирования профиля горной разработки переднего обзора на основе одного или нескольких контуров и управления системой разработки длинными забоями на основе профиля горной разработки переднего обзора. 3 н. и 19 з.п. ф-лы, 11 ил.
1. Система разработки длинными забоями, содержащая:
скребковый конвейер;
очистной комбайн, выполненный с возможностью перемещения вдоль забойного скребкового конвейера в первом направлении или втором направлении, причем очистной комбайн содержит кожух очистного комбайна, первый режущий барабан, проходящий в первом направлении от кожуха очистного комбайна, и второй режущий барабан, проходящий во втором направлении от кожуха очистного комбайна;
первую камеру, выполненную с возможностью генерирования первого сигнала, связанного с первым направлением перемещения для очистного комбайна;
вторую камеру, выполненную с возможностью генерирования второго сигнала, связанного со вторым направлением перемещения для очистного комбайна; и
контроллер, содержащий постоянный машиночитаемый носитель и процессор, причем контроллер содержит выполняемые компьютером команды, сохраняемые в машиночитаемом носителе, для управления работой системы разработки длинными забоями для:
приема первого сигнала с первой камеры,
приема второго сигнала со второй камеры,
анализа по меньшей мере одного из первого сигнала и второго сигнала для идентификации одного или нескольких контуров конструкции системы разработки длинными забоями впереди очистного комбайна в любом из первого направления или второго направления,
генерирования профиля горной разработки переднего обзора на основе одного или нескольких контуров и
управления системой разработки длинными забоями на основе профиля горной разработки переднего обзора.
2. Система разработки длинными забоями по п. 1, в которой первая камера и вторая камера смонтированы на кожухе очистного комбайна.
3. Система разработки длинными забоями по п. 1, в которой конструкция системы разработки длинными забоями впереди очистного комбайна является забойным скребковым конвейером.
4. Система разработки длинными забоями по п. 3, в которой один или несколько контуров представляют собой рештачный став очистного комбайна.
5. Система разработки длинными забоями по п. 1, в которой выполняемые компьютером команды, сохраняемые в машиночитаемом носителе для управления системой разработки длинными забоями на основе профиля горной разработки переднего обзора, содержат выполняемые компьютером команды для управления одним из первого режущего барабана и второго режущего барабана.
6. Система разработки длинными забоями по п. 1, в которой выполняемые компьютером команды, сохраняемые в машиночитаемом носителе для управления системой разработки длинными забоями на основе профиля горной разработки переднего обзора, содержат выполняемые компьютером команды для управления забойным скребковым конвейером.
7. Система разработки длинными забоями по п. 1, в которой контроллер дополнительно содержит выполняемые компьютером команды, сохраняемые в машиночитаемом носителе для управления работой системы разработки длинными забоями для:
исполнения алгоритма одновременной локализации и картографирования (”SLAM”) для идентификации одного или нескольких контуров конструкции системы разработки длинными забоями.
8. Система разработки длинными забоями по п. 1, в которой первая камера выполнена с возможностью обнаружения и видимого света, и инфракрасного света и вторая камера выполнена с возможностью обнаружения и видимого света, и инфракрасного света.
9. Система разработки длинными забоями по п. 1, в которой первая камера установлена на крепи системы разработки длинными забоями, выполненной с возможностью защиты очистного комбайна от вышележащих геологических пластов.
10. Реализуемый посредством компьютера способ управления системой разработки длинными забоями, которая содержит забойный скребковый конвейер, очистной комбайн, выполненный с возможностью перемещения вдоль забойного скребкового конвейера в первом направлении или втором направлении, первую камеру, вторую камеру и контроллер, причем способ содержит этапы, на которых:
принимают первый сигнал с первой камеры;
принимают второй сигнал со второй камеры;
анализируют по меньшей мере один из первого сигнала и второго сигнала для идентификации одного или нескольких контуров конструкции системы разработки длинными забоями впереди очистного комбайна в первом направлении перемещения очистного комбайна или во втором направлении перемещения очистного комбайна;
генерируют профиль горной разработки переднего обзора на основе одного или нескольких контуров и
управляют системой разработки длинными забоями на основе профиля горной разработки переднего обзора.
11. Способ по п. 10, в котором конструкцией системы разработки длинными забоями впереди очистного комбайна является забойный скребковый конвейер.
12. Способ по п. 10, в котором один или несколько контуров представляют собой рештачный став очистного комбайна.
13. Способ по п. 10, в котором управление системой разработки длинными забоями на основе профиля горной разработки переднего обзора включает в себя управление одним из первого режущего барабана и второго режущего барабана.
14. Способ по п. 13, в котором управление одним из первого режущего барабана и второго режущего барабана включает в себя подъем или опускание одного из первого режущего барабана и второго режущего барабана.
15. Способ по п. 10, в котором управление системой разработки длинными забоями на основе профиля горной разработки переднего обзора включает в себя управление забойным скребковым конвейером.
16. Способ по п. 10, дополнительно включающий в себя:
исполнение алгоритма одновременной локализации и картографирования (”SLAM”) для идентификации одного или нескольких контуров конструкции системы разработки длинными забоями.
17. Контроллер для управления системой разработки длинными забоями, содержащий постоянный машиночитаемый носитель и процессор, причем контроллер содержит выполняемые компьютером команды, сохраняемые в машиночитаемом носителе для управления работой промышленной машины системы разработки длинными забоями для:
приема первого сигнала с первой камеры;
приема второго сигнала со второй камеры;
анализа по меньшей мере одного из первого сигнала и второго сигнала для идентификации одного или нескольких контуров конструкций системы разработки длинными забоями впереди очистного комбайна в первом направлении перемещения очистного комбайна или втором направлении перемещения очистного комбайна;
генерирования профиля горной разработки переднего обзора на основе одного или нескольких контуров и
управления системой разработки длинными забоями на основе профиля горной разработки переднего обзора.
18. Контроллер по п. 17, в котором конструкция системы разработки длинными забоями впереди очистного комбайна является забойным скребковым конвейером.
19. Контроллер по п. 17, в котором один или несколько контуров представляют собой рештачный став очистного комбайна.
20. Контроллер по п. 17, в котором выполняемые компьютером команды, сохраняемые в машиночитаемом носителе для управления системой разработки длинными забоями на основе профиля горной разработки переднего обзора, содержат выполняемые компьютером команды для управления одним из первого режущего барабана и второго режущего барабана.
21. Контроллер по п. 17, в котором выполняемые компьютером команды, сохраняемые в машиночитаемом носителе для управления системой разработки длинными забоями на основе профиля горной разработки переднего обзора, содержат выполняемые компьютером команды для управления забойным скребковым конвейером.
22. Контроллер по п. 17, дополнительно содержащий выполняемые компьютером команды, сохраняемые в машиночитаемом носителе для управления работой системы разработки длинными забоями для:
исполнения алгоритма одновременной локализации и картографирования (”SLAM”) для идентификации одного или нескольких контуров конструкции системы разработки длинными забоями.
| CN 107100658 A, 29.08.2017 | |||
| US 2009212216 A1, 27.08.2009 | |||
| US 2012319453 A1, 20.12.2012 | |||
| SU 1559803 A1, 20.04.2000 | |||
| Способ управления очистным комплексом | 1988 |
|
SU1523661A1 |
| Способ изготовления делительных ремешков для кардочесальных аппаратов | 1955 |
|
SU102681A1 |
| СПОСОБ ПРОИЗВОДСТВА КОМПОТА ИЗ АЛЫЧИ | 2010 |
|
RU2420120C1 |
| US 2016061031 A1, 03.03.2016. | |||

