Способ многообзорного накопления сигнала в РЛС при обнаружении воздушных целей в импульсно-доплеровском (ИД) режиме относится к области радиолокации и, конкретно, к способам обнаружения движущихся целей. Способ может использоваться в наземных и авиационных РЛС обнаружения воздушных целей, осуществляющих последовательный обзор пространства, и работающих в режиме высокой частоты повторения импульсов [1, с. 178].
Известен способ некогерентного экстремального накопления-обнаружения сигнала в ИД РЛС [2]. Суть известного способа заключается в следующем.
Известный способ заключается в когерентно-доплеровской фильтрации сигналов в каждом элементе разрешения по дальности и радиальной скорости и формирование матрицы дальность - радиальная скорость, содержащей амплитуды сигналов. Гипотезу о присутствии цели в текущем обзоре для каждого канала радиальной скорости принимают в случае принятия хотя бы одной из частных гипотез. Частную гипотезу принимают, если достаточная статистика превышает пороговое значение. Достаточную статистику формируют путем суммирования модулей максимальных значений амплитуд сигнала из выборок канала радиальной скорости, полученных в смежных обзорах одного углового направления. Объем выборок ограничивают стробами дальности, которые формируют обратной экстраполяцией дальности, относительно элемента разрешения по дальности с максимальной амплитудой сигнала в текущем обзоре на основе оценок его дальности, радиальной скорости и ошибки ее измерения, периода обзора и принятой гипотезы движения цели. Для текущего обзора строб дальности совпадает со всем анализируемым интервалом дальностей. Частными гипотезами являются гипотезы о присутствии сигнала цели только в текущем обзоре, текущем и предыдущем обзоре, текущем и двух предыдущих обзорах и так далее, число проверяемых частных гипотез определяют равным порядку обнаружителя.
В известном способе производится одновременная (параллельная) проверка частных двухальтернативных гипотез о присутствии  или отсутствии
или отсутствии  сигнала цели в одном (H11, Н10), двух (Н21, Н20) и т.д. смежных, включая текущий, обзорах одного углового направления, что позволяет производить обнаружение как вновь появляющихся в анализируемой выборке сигналов, так и сигналов, присутствующих в выборках текущего и предыдущих обзоров. Гипотеза о присутствии цели в текущем обзоре принимается в случае принятия хотя бы одной из частных гипотез присутствия сигнала цели
сигнала цели в одном (H11, Н10), двух (Н21, Н20) и т.д. смежных, включая текущий, обзорах одного углового направления, что позволяет производить обнаружение как вновь появляющихся в анализируемой выборке сигналов, так и сигналов, присутствующих в выборках текущего и предыдущих обзоров. Гипотеза о присутствии цели в текущем обзоре принимается в случае принятия хотя бы одной из частных гипотез присутствия сигнала цели

В противоположном случае принимается гипотеза об отсутствии цели - Н0.
Недостатком известного способа, значительно снижающим его практическую применимость, является появление ложных отметок при наблюдении мощных сигналов целей, а так же при воздействии на приемник РЛС однократных импульсных помех.
Причиной недостатка известного способа является использование сигналов с большой амплитудой в течение всего времени многообзорного накопления и появление ложных отметок в нескольких последовательных обзорах из-за однократного появления сигнала с большой амплитудой, а также возникновения и ложного подтверждения нескольких гипотез, при появлении которых используется один и тот же сигнал с большой амплитудой.
В качестве наиболее близкого аналога выбран рассмотренный способ некогерентного экстремального накопления-обнаружения сигнала в ИД РЛС [2].
Техническим результатом изобретения является снижение числа ложных отметок при наблюдении мощных сигналов целей, а так же при воздействии на приемник РЛС однократных импульсных помех.
Технический результат достигается ограничением амплитуды сигналов, используемых при многообзорном накоплении.
Заявленный способ заключается в когерентно-доплеровской фильтрации сигналов в каждом элементе разрешения по дальности и радиальной скорости и формирование матрицы дальность - радиальная скорость, содержащей амплитуды сигналов. Сохранении (запоминании) матрицы дальность - радиальная скорость за несколько последних обзоров пространства. Гипотезу о присутствии цели в текущем обзоре для каждого канала радиальной скорости принимают в случае принятия хотя бы одной из частных гипотез. Каждую из частных гипотез которых принимают, если достаточная статистика превышает пороговое значение. Достаточную статистику формируют как сумму ограниченных по амплитуде модулей максимальных значений амплитуд сигнала из выборок канала радиальной скорости, полученных в смежных обзорах одного углового направления. Объем выборок ограничивают стробами дальности, которые формируют с учетом гипотезы о параметрах движения цели путем обратной экстраполяцией дальности, относительно элемента разрешения по дальности с максимальной амплитудой сигнала в текущем обзоре на основе оценок его дальности, радиальной скорости и ошибки ее измерения, периода обзора и принятой гипотезы движения цели. Для текущего обзора строб дальности совпадает со всем анализируемым интервалом дальностей. Частными гипотезами являются гипотезы о присутствии сигнала цели только в текущем обзоре, текущем и предыдущем обзоре, текущем и двух предыдущих обзорах и так далее, число проверяемых частных гипотез определяют равным порядку обнаружителя.
Заявленный способ заключатся в одновременной (параллельной) проверке частных двухальтернативных гипотез о присутствии или отсутствии  сигнала цели в одном (Н11 Н10), двух (Н21 Н20) и т.д. смежных, включая текущий, обзорах одного углового направления, что позволяет производить обнаружение как вновь появляющихся в анализируемой выборке сигналов, так и сигналов, присутствующих в выборках текущего и предыдущих обзоров. Гипотеза о присутствии цели в текущем обзоре принимается в случае принятия хотя бы одной из частных гипотез присутствия сигнала цели
сигнала цели в одном (Н11 Н10), двух (Н21 Н20) и т.д. смежных, включая текущий, обзорах одного углового направления, что позволяет производить обнаружение как вновь появляющихся в анализируемой выборке сигналов, так и сигналов, присутствующих в выборках текущего и предыдущих обзоров. Гипотеза о присутствии цели в текущем обзоре принимается в случае принятия хотя бы одной из частных гипотез присутствия сигнала цели

В противоположном случае принимается гипотеза об отсутствии цели - Н0.
Число одновременно рассматриваемых гипотез равно числу смежных обзоров, результаты которых обрабатываются совместно, называется порядком обнаружителя и обозначается М. Как и в способе выбранном в качестве прототипа, обнаруженные отметки характеризуются неоднозначно измеренной дальностью.
Реализация заявленного способа идентична для каждого углового направления и каждого канала радиальной скорости (доплеровского фильтра), в связи с чем рассматривается применительно к одному угловому направлению, определяемому угловыми размерами приемного луча РЛС, и одному каналу радиальной скорости (доплеровскому фильтру).
Заявленный способ требует совместной обработки М матриц дальность-радиальная скорость, полученных в результате корреляционно-фильтровой обработки эхо-сигнала, принятого с одного и того же углового направления в текущем и М-1 прошлых обзорах. Строки матрицы дальность - радиальная скорость соответствуют каналам радиальной скорости (доплеровским фильтрам), столбцы - каналам дальности (неоднозначно измеренной).
Достаточной статистикой, используемой для проверки гипотезы о присутствии сигнала цели только в текущем k-ом обзоре, являются ограниченные по амплитуде модули значений элементов матрицы дальность - радиальная скорость, полученной в текущем обзоре.
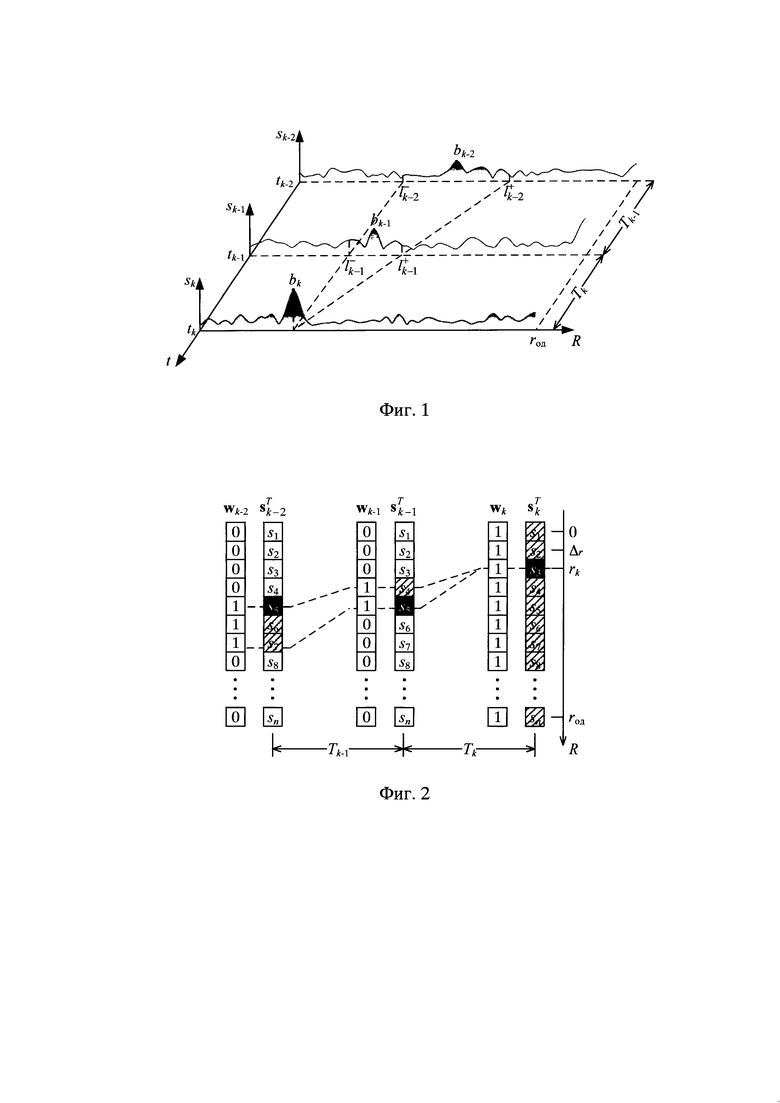
На фиг. 1 и 2 схематично приведен пример отбора значений сигнала для формирования достаточной статистики по трем смежным обзорам.
Достаточная статистика для проверки частной гипотезы о присутствии сигнала цели с текущего k-го до k-u-го обзоров включительно, для случая линейного суммирования [3, с. 165], формируется по формуле

где b'k - ограниченное по амплитуде значение сигнала bk

где  - порог ограничения амплитуды сигнала;
- порог ограничения амплитуды сигнала;
bk - максимальное значение сигнала из выборки

где sk - вектор-строка комплексных сигналов (одна из строк матрицы дальность-радиальная скорость) содержащая n элементов;
zk - бинарная диагональная матрица, определяемая стробирующей маской wk, задающая строб дальности

Объем выборки, задаваемый стробирующей маской для k-u-го обзора, равен числу ненулевых элементов wk-u

где wk-u,i - i-й элемент вектора-столбца wk-u.
Оценка неоднозначной дальности отметки rk, соответствующая центру элемента разрешения по дальности, в котором находится экстремум в текущем, k-ом обзоре

где Δr - разрешающая способность по дальности;
m - номер канала дальности с экстремумом.
Для текущего k-го обзора производится анализ всех элементов выборки, потому vk=n, a zk=I, где I - единичная матрица.
Принятие частной гипотезы о присутствии цели  производится при условии Zu>hu, где hu - пороговое значение. В противном случае принимается гипотеза
производится при условии Zu>hu, где hu - пороговое значение. В противном случае принимается гипотеза  .
.
Для k-u-го обзора стробирующая маска wk-u определяется следующим образом.
Рассчитывается строб дальности  в котором сигнал цели находился и обзоров назад с вероятностью близкой 1 в случае принятой модели движения цели. Нижняя и верхняя границы строба дальности
в котором сигнал цели находился и обзоров назад с вероятностью близкой 1 в случае принятой модели движения цели. Нижняя и верхняя границы строба дальности
где υk - оценка радиальной скорости цели, соответствующая центру анализируемого канала (фильтра) доплеровской частоты;
 - ошибка измерения радиальной скорости цели, задаваемая шириной фильтра доплеровской частоты
- ошибка измерения радиальной скорости цели, задаваемая шириной фильтра доплеровской частоты  и длиной волны λ;
и длиной волны λ;
Tk-i - время между текущим k-ым и k-i-ым обзорами анализируемого углового направления (период обзора).
Производится расчет нижнего  и верхнего
и верхнего  индексов элементов, определяющих wk-u.
индексов элементов, определяющих wk-u.
Если размер строба дальности  рассчитанный по (9), не меньше интервала однозначного измерения дальности год, определяемого частотой повторения импульсов РЛС,
рассчитанный по (9), не меньше интервала однозначного измерения дальности год, определяемого частотой повторения импульсов РЛС,  тогда
тогда 
В противном случае, вследствие неоднозначного измерения дальности возможно  и (или)
и (или)  , тогда
, тогда
где mod(a, b) - функция расчета остатка от деления a на b;
floor - функция округления до меньшего целого;
ceil - функция округления до большего целого.
Элементы стробирующей маска wk-u

Принцип формирования и применения стробирующих масок приведен на фиг. 2.
Решение по частным гипотезам принимается из условий

Пороговые значения hu,  используемые для принятия решения по достаточной статистике Zu, задаются по критерию обеспечения заданной вероятности ложной тревоги F в элементе разрешения, и определяются из уравнений
используемые для принятия решения по достаточной статистике Zu, задаются по критерию обеспечения заданной вероятности ложной тревоги F в элементе разрешения, и определяются из уравнений
при 
где ƒ0(s) - плотность вероятности ограниченного по амплитуде модуля амплитуды шума на входе обнаружителя.
 - характеристическая функция усеченного справа по α распределения случайной величины.
- характеристическая функция усеченного справа по α распределения случайной величины.
Характеристическая функция распределения максимального значения случайной величины на выборке объемом n

где ƒext(x, n) - плотность вероятности распределения максимального значения случайной величины [4, с. 99] на выборке объемом n.
Порог ограничения амплитуды сигнала  выбирается равным порогу, обеспечивающему заданный уровень ложных тревог F по критерию Неймана-Пирсона для обнаружителя без многообзорного накопления сигнала.
выбирается равным порогу, обеспечивающему заданный уровень ложных тревог F по критерию Неймана-Пирсона для обнаружителя без многообзорного накопления сигнала.
Изобретение иллюстрируется следующими чертежами:
Фиг. 1 - принцип обратной экстраполяции строба дальности.
На Фиг. 1 приведены три реализации модуля сигнала на выходе одного и того же доплеровского фильтра для одного положения диаграммы направленности антенны РЛС, полученные в трех последовательных обзорах.
Фиг. 2 - принцип применения стробирующих масок и формирования достаточной статистики.
На фиг. 2 приведены три выборки сигнала одного канала радиальной скорости, полученные в трех смежных обзорах одного углового направления. Части выборок, используемые для формирования достаточной статистики, выделены наклонной штриховкой, элементы содержащие экстремумы - сплошной заливкой.
На фиг. 2 обозначены:
 - выборка, являющаяся транспонированной вектор-строкой, содержащая n комплексных сигналов в элементах дальности одного канала радиальной скорости;
- выборка, являющаяся транспонированной вектор-строкой, содержащая n комплексных сигналов в элементах дальности одного канала радиальной скорости;
s1, s2,…,sn - комплексные значения сигнала в элементах разрешения;
wk - стробирующая маска;
R - ось дальности;
 - интервал однозначного измерения дальности ИД РЛС;
- интервал однозначного измерения дальности ИД РЛС;
rk - номер элемента выборки, полученной в текущем обзоре и имеющий максимальное значение;
Δr - размер элемента разрешения по дальности;
Tk - период обзора.
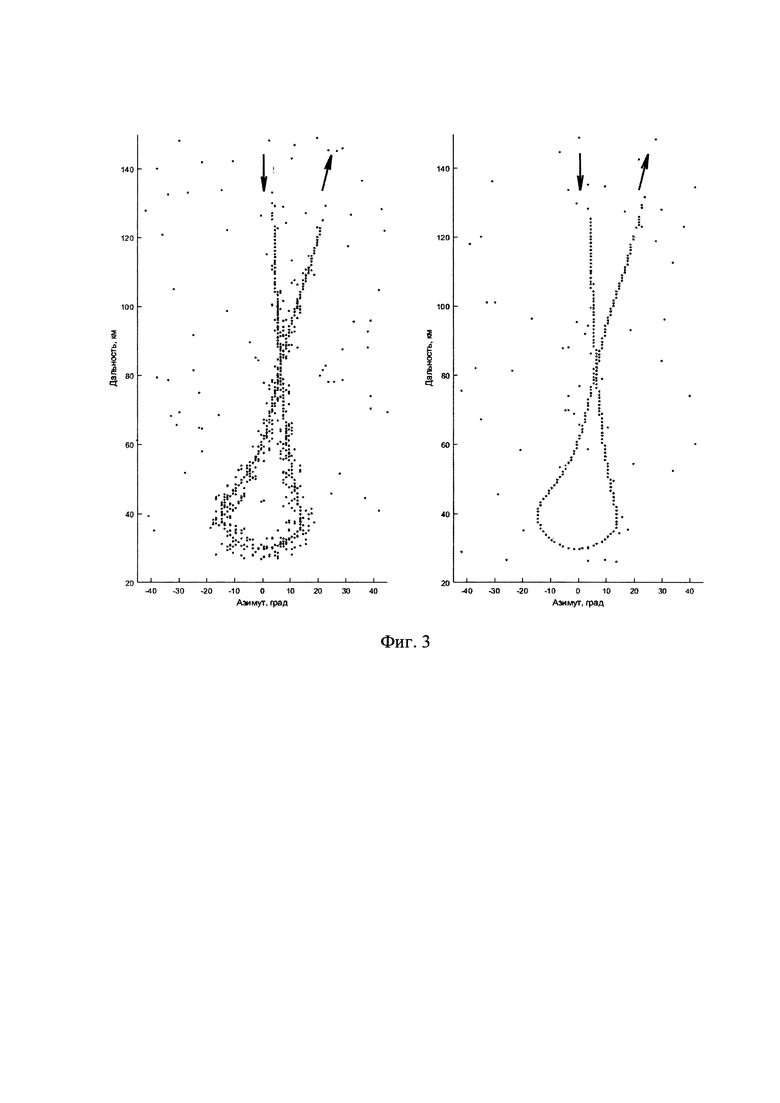
Фиг. 3 - пример устранения ложных отметок при наблюдении мощного сигнала цели. Слева - при накоплении сигнала известным способом выбранным в качестве аналога, справа - предлагаемым способом.
На фиг. 3 в системе координат азимут - наклонная дальность приведены результаты обнаружения движущейся воздушной цели при использовании многообзорного накопления за 4 обзора в течение 260 обзоров. Точками обозначены истинные и ложные отметки, стрелками -направление движения цели.
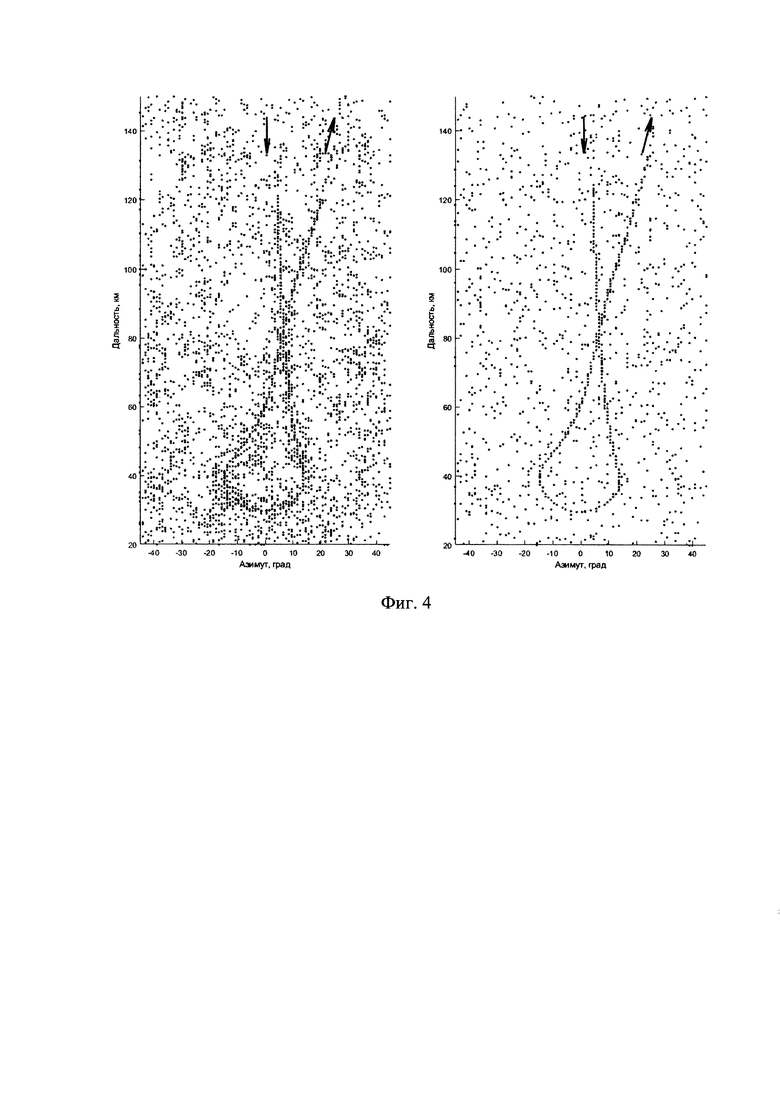
Фиг. 4 - пример устранения ложных отметок при наблюдении мощного сигнала цели в условиях воздействия на приемник РЛС импульсных помех с интенсивностью 5 импульсов за один обзор. Слева - при накоплении сигнала известным способом выбранным в качестве аналога, справа -предлагаемым способом.
Используемые на фиг. 4 условные обозначения аналогичны фиг. 3.
Фиг. 5 - Кривые обнаружения (зависимости вероятности правильного обнаружения D от ОСШ, при фиксированной вероятности ложной тревоги F) не флюктуирующего по амплитуде сигнала при F=5⋅10-6 при оценке трех гипотез (М=3).
На фиг. 3 обозначены:
КО - кривая обнаружения для классического способа обнаружения;
«1 из 3» - кривые обнаружения для предлагаемого способа при присутствии сигнала цели только в текущем обзоре;
«1 и 2 из 3» - кривые обнаружения для предлагаемого способа при присутствии сигнала цели только в текущем и прошлом обзорах;
«1, 2 и 3 из 3» - кривые обнаружения для предлагаемого способа при присутствии сигнала цели в трех последних обзорах;
{vk, vk-1, vk-2} - объемы выборок, задаваемые стробирующими масками для k-го, k-1-го и k-2 обзоров соответственно.
Фиг. 6 - Кривые обнаружения флюктуирующего по амплитуде сигнала при F=10-6 при оценке трех гипотез (М=3).
Обозначения на фиг. 4 соответствуют обозначениям на фиг. 2.
Заявленный способ включает:
Выделение из матрицы дальность - радиальная скорость, полученной в результате зондирования текущего, k-го углового направления, и содержащей комплексные значения сигнала, строк, соответствующих каналам радиальной скорости.
Для каждой строки текущего обзора sk, состоящей из n элементов, соответствующих каналам дальности, при wk=I по (6) производится расчет zk.
Расчет по (9) М-1 стробов дальности  , в которых сигнал цели с высокой вероятностью находился u обзоров назад.
, в которых сигнал цели с высокой вероятностью находился u обзоров назад.
Расчет по (4) значений b'k элементов выборок, ограниченных стробами дальности текущего и прошлых обзоров, включая: оценку неоднозначной дальности отметки rk по (8); расчет нижнего  и верхнего
и верхнего  индексов по (10); определение стробирующей маски wk-u по (11) и zk-u по (6).
индексов по (10); определение стробирующей маски wk-u по (11) и zk-u по (6).
Расчет достаточной статистики Zu по (3-5).
Расчет пороговых значений hu,  по (13).
по (13).
Принятие решения по частным гипотезам путем сравнения достаточных статистик Zu с соответствующими пороговыми по (12).
Принятие решения о присутствии или отсутствии цели в строке sk матрицы дальность - радиальная скорость по (2).
Эффективность предлагаемого способа, в части дальности обнаружения целей, аналогична эффективности способа, выбранного в качестве наиболее близкого аналога.
Заявленный технический результат подтвержден результатами, полученными методом имитационного компьютерного моделирования системы обнаружения, реализующей предложенный способ.
Моделирование выполнено при следующих исходных данных
Обнаружение движущейся воздушной цели 2-координатной РЛС в азимутальном секторе 90° в диапазоне наклонных дальностей от 20 до 150 км. Время накопления обнаруженных отметок - 260 циклов обзора. Порядок обнаружителя - 4. Число элементов разрешения по азимуту - 90, по дальности - 500. Темп обзора - 6 с. Скорость цели - от 10 до 500 м/с. Вероятность ложной тревоги - 2⋅10-3. Отношение сигнал/шум для цели на дальности 100 км - 5,5 дБ.
Результаты моделирования известного и предлагаемого способов для случая наблюдения цели, скорость которой составляет 200 м/с, приведены на фиг. 3 и 4. Приведенные результаты моделирования демонстрируют достижение заявленного технического результата, заключающего в снижении числа ложных отметок при наблюдении мощных сигналов целей, а так же при воздействии на приемник РЛС однократных импульсных помех.
Литература
1. Справочник по радиолокации под ред. М.И. Сколника. Пер. с англ. Под общей ред. B.C. Вербы. Книга 2. М.: Техносфера, 2014.
2. Пат. 2694809 Российская Федерация, МПК G01S 3/02. Способ некогерентного экстремального накопления-обнаружения сигнала в импульсно-доплеровской РЛС / Колбаско И.В. - №2019101558, заявл. 21.01.19, опубл. 17.07.19, Бюл. №20.
3. Теоретические основы радиолокации. Под ред. Ширмана Я.Д. - М.: «Советское радио», 1970.
4. Гумбель Э. Статистика экстремальных значений. Перевод с англ., М.: Мир, 1965. с.
Способ многообзорного накопления сигнала в РЛС при обнаружении воздушных целей в импульсно-доплеровском режиме относится к области радиолокации и, конкретно, к способам обнаружения движущихся целей. Способ может использоваться в наземных РЛС обнаружения воздушных целей, осуществляющих последовательный обзор заданного сектора пространства и работающих в режиме высокой частоты повторения импульсов. Техническим результатом изобретения является снижение числа ложных отметок при наблюдении мощных сигналов целей, а так же при воздействии на приемник РЛС однократных импульсных помех. Способ включает когерентно-доплеровскую фильтрацию сигналов в каждом элементе разрешения по дальности и радиальной скорости и формирование матрицы дальность - радиальная скорость, содержащей амплитуды сигналов, за несколько последних обзоров пространства, формирование достаточной статистики как функции от максимальных значений сигнала за несколько последовательных обзоров пространства с учетом гипотезы о параметрах движения цели, проверку частных гипотез о присутствии цели в текущем обзоре для каждого канала радиальной скорости сравнением достаточной статистики с пороговым значением. Достаточную статистику формируют как сумму ограниченных по амплитуде модулей максимальных значений амплитуд сигнала из выборок канала радиальной скорости, полученных в смежных обзорах одного углового направления. 4 ил.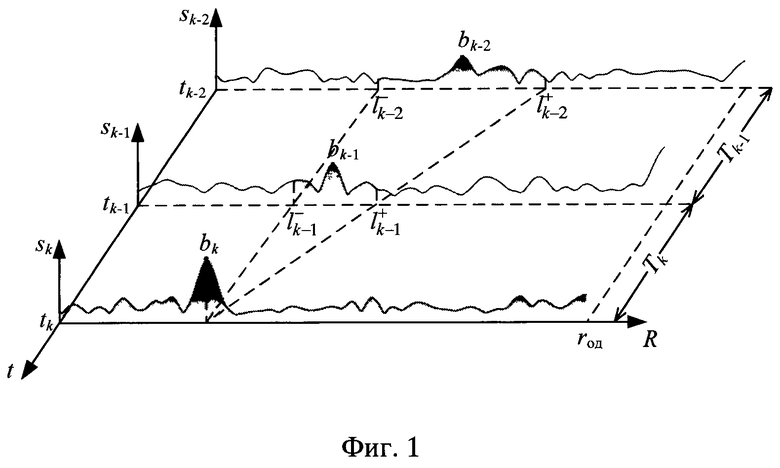
Способ многообзорного накопления сигнала в РЛС при обнаружении воздушных целей в импульсно-доплеровском режиме, предусматривающий когерентно-доплеровскую фильтрацию сигналов в каждом элементе разрешения по дальности и радиальной скорости и формирование матрицы дальность - радиальная скорость, содержащей амплитуды сигналов, сохранение матрицы дальность - радиальная скорость за несколько последних обзоров пространства, формирование достаточной статистики как функции от максимальных значений сигнала за несколько последовательных обзоров пространства с учетом гипотезы о параметрах движения цели, проверку частных гипотез о присутствии цели в текущем обзоре для каждого канала радиальной скорости сравнением достаточной статистики с пороговым значением, отличающийся тем, что достаточную статистику формируют как сумму ограниченных по амплитуде модулей максимальных значений амплитуд сигнала из выборок канала радиальной скорости, полученных в смежных обзорах одного углового направления.
| СПОСОБ НЕКОГЕРЕНТНОГО ЭКСТРЕМАЛЬНОГО НАКОПЛЕНИЯ-ОБНАРУЖЕНИЯ СИГНАЛА В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС | 2019 |
|
RU2694809C1 |
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ МАНЕВРИРУЮЩЕЙ ЦЕЛИ | 2004 |
|
RU2282873C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2007 |
|
RU2348053C1 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2017 |
|
RU2646857C1 |
| CN 109001708 A, 14.12.2018 | |||
| CN 107942324 A, 20.04.2018 | |||
| WO 2019119223 A1, 27.06.2019 | |||
| Катализатор для дегидратации циклогексанола | 1975 |
|
SU535957A1 |
| НЕУЙМИН А.С., ЖУК С.Я | |||
| Обнаружение цели в импульсно-доплеровской РЛС на основе многообзорного накопления сигналов / Вiсник | |||

