ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изложенное ниже относится к подставке для субъекта обследования в системе формирования изображений, выполненной с возможностью расположения на ней объекта или субъекта обследования до, во время и/или после сканирования объекта или субъекта и описанной применительно к конкретному использованию в компьютерной томографии (КТ). Однако изложение ниже относится также и к подставке для субъекта обследования применительно к другим способам формирования изображений, включающим в себя, без ограничения указанным, магниторезонансную томографию (МРТ), позитронно-эмиссионную томографию (ПЭТ), однофотонную эмиссионную компьютерную томографию (ОФЭКТ), рентгеноскопию и/или другие способы формирования изображений.
УРОВЕНЬ ТЕХНИКИ
Сканер компьютерной томографии (КТ) включает в себя поворотный участок, поддерживаемый с возможностью поворота неподвижным участком. Поворотный участок поддерживает рентгеновскую трубку, испускающую излучение, которое пересекает зону обследования и сам объект или субъект обследования, и детекторную матрицу, которая детектирует излучение, пересекающее зону обследования, и генерирует проекционные данные, определяющие детектированное облучение. Подставка для субъекта обследования (далее - подставка) поддерживает объект или субъекта в зоне обследования до, во время и/или после сканирования и служит, например, для укладывания на нее объекта или субъекта, доставки объекта или субъекта и удаления объекта или субъекта в зону/из зоны обследования, и выгрузки объекта или субъекта. Восстанавливающее устройство восстанавливает проекционные данные и генерирует данные волюметрического изображения, определяющие участок объекта или субъекта в зоне обследования.
Подставка включает в себя основание, которое прикреплено к полу помещения для обследования и выполнено с возможностью перемещения под электронным управлением в вертикальном направлении по отношению к полу, и верхнюю столообразную часть (далее - стол), которая прикреплена к основанию и выполнена с возможностью перемещения под электронным управлением или вручную пользователем в горизонтальном направлении по отношению к основанию внутри и снаружи зоны обследования до, во время и/или после сканирования. Сканер также включает в себя схему, чтобы препятствовать или управляемым образом останавливать электронно-управляемое перемещение в вертикальном и горизонтальном направлениях соответственно основания и стола, например, в ответ на управляемое или неуправляемое отключение электропитания для предотвращения столкновения, смягчения обнаруженного столкновения, или в ответ на ошибку приводной системы подставки. Такая схема сконфигурирована таким образом, что остановка движущейся подставки соответствует определенным стандартам и является комфортной для пациента.
В качестве примера стандарт IEC 60601 версий 1 и 2 требует остановки электронно-управляемого движущегося стола через десять миллиметров (10 мм), а стандарт IEC 60601 версии 3 требует остановки электронно-управляемого движущегося стола через двадцать пять миллиметров (25 мм), в обоих случаях за время в пределах половины секунды (0,5 с) с момента отключения электропитания и при нагрузке в 135 килограмм (135 кг), с последующим нахождением стола в свободном состоянии. Стандартный стол выполнялся с возможностью перемещения со скоростью до двухсот миллиметров в секунду (200 мм/с) и с обеспечением соответствия упомянутым выше требованиям IEC за счет отключения электропитания, подаваемого на двигатель стола, и предоставления возможности столу двигаться по инерции до остановки.
К сожалению, такое торможение при высоких скоростях повышает общую стоимость системы из-за требования высокой пиковой мощности и может также вносить дискомфорт и/или риск для более легких пациентов, если тормозной ток определяется для более тяжелой нагрузки. Дополнительно при высоких скоростях, если столкновения в горизонтальном и вертикальном направлениях или неисправности приводной цепи не могут быть обнаружены вовремя, такое перемещение может привести к повреждению подставки и/или объектов, внешних по отношению к подставке. Кроме того, прикрепление к подставке приспособлений, относящихся к этой поставке, может изменить допустимое перемещение подставки по вертикали и/или горизонтали, что может привести к столкновениям при данной границе столкновений, которые в противном случае не должны происходить. Кроме того, традиционные системы формирования изображений могут обеспечивать менее чем желательные опоры и механизмы для прикрепления определенных приспособлений к подставке.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Аспекты настоящего изобретения относятся к упомянутым выше и другим предметам обсуждения.
Согласно одному аспекту способ включает в себя прием сигнала на запрещение перемещения подставки, указывающего по меньшей мере на одно из отключения электропитания системы формирования изображений, столкновения горизонтально перемещающегося стола системы формирования изображений, расцепления приводной системы горизонтального движения, выполненной с возможностью горизонтального перемещения стола, или столкновения вертикально перемещающейся подставки в системе формирования изображений, когда приводная система вертикального движения приводит подставку в движение по вертикали, и запрещение, в ответ на получение сигнала на запрещение перемещения подставки, по меньшей мере либо горизонтального перемещения стола, либо вертикального перемещения подставки.
Согласно другому аспекту система формирования изображений включает в себя источник излучения, испускающий излучение, которое пересекает зону обследования, детекторную матрицу, расположенную напротив источника излучения поперек зоны обследования, которая детектирует излучение, пересекающее зону обследования, и подставку, выполненную с возможностью укладывания на нее объекта или субъекта, подлежащего сканированию. Подставка включает в себя основание, выполненное с возможностью вертикального перемещения, и стол, выполненный с возможностью горизонтального перемещения, причем этот стол установлен на основании по скользящей посадке. Система дополнительно включает в себя компонент для запрещения по меньшей мере либо горизонтального, либо вертикального перемещения подставки в ответ на заданное событие в системе формирования изображений.
Согласно другому аспекту система формирования изображений включает в себя пульт оператора для управления системой формирования изображений, источник излучения, испускающий излучение, которое пересекает зону обследования, детекторную матрицу, расположенную напротив этого источника поперек зоны обследования, которая детектирует излучение, пересекающее зону обследования, и подставку, выполненную с возможностью укладывания на нее объекта или субъекта, подлежащего сканированию. Подставка включает в себя датчик, выполненный с возможностью обнаружения физического прикрепления к подставке приспособления для подставки и определения типа этого приспособления, при этом пульт оператора определяет границу столкновений для подставки, исходя из определенного типа приспособления, и использует определенную границу столкновений при осуществлении либо горизонтального, либо вертикального перемещения подставки.
Согласно другому аспекту система формирования изображений включает в себя подставку, выполненную с возможностью укладывания на нее объекта или субъекта, подлежащего сканированию. Подставка включает в себя основание, выполненное с возможностью вертикального перемещения, и стол, установленный по скользящей посадке на основании и выполненный с возможностью горизонтального перемещения. Этот стол является электрически непроводящим.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение может выполняться в форме различных компонентов и сочетаний компонентов и различных этапов и сочетаний этапов. Чертежи служат лишь в целях представления предпочтительных вариантов осуществления и не должны рассматриваться как ограничивающие изобретение.
Фиг.1 - схематическое представление системы формирования изображений в соединении с опциональным блоком обнаружения аварийной остановки (E-stop), устройством предотвращения горизонтального столкновения, блоком предотвращения вертикального столкновения, блоком обнаружения расцепления соединителя и подставкой.
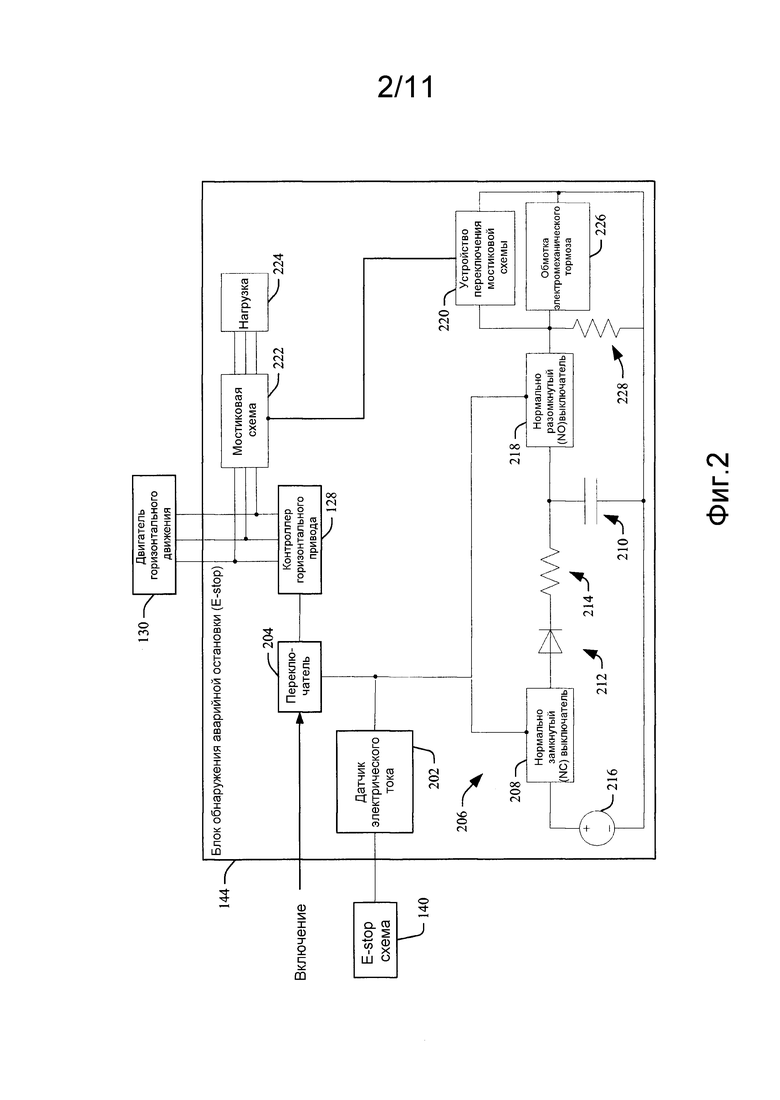
Фиг.2 - схематическое представление примера блока обнаружения аварийной остановки, которое может быть использовано в соединении с системой формирования изображений на фиг.1.
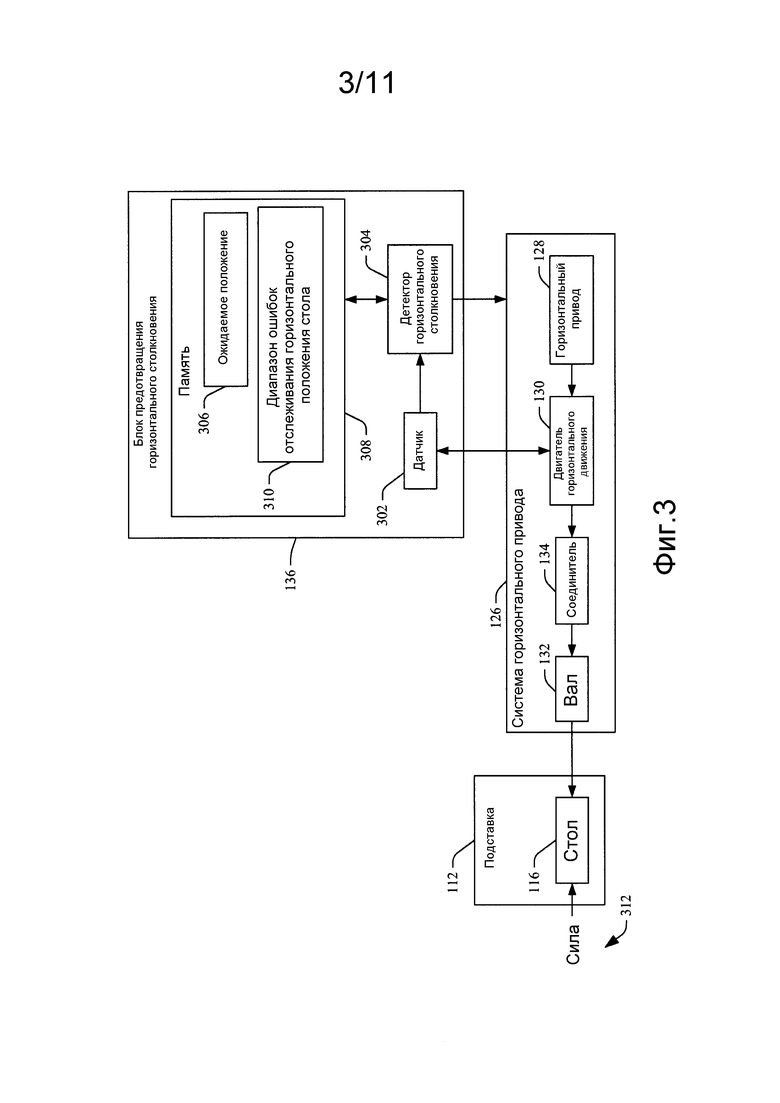
Фиг.3 - схематическое представление примера устройства предотвращения горизонтального столкновения, которое может быть использовано в соединении с системой формирования изображений на фиг.1.
Фиг.4 - схематическое представление примера блока предотвращения вертикального столкновения, которое может быть использовано в соединении с системой формирования изображений на фиг.1.
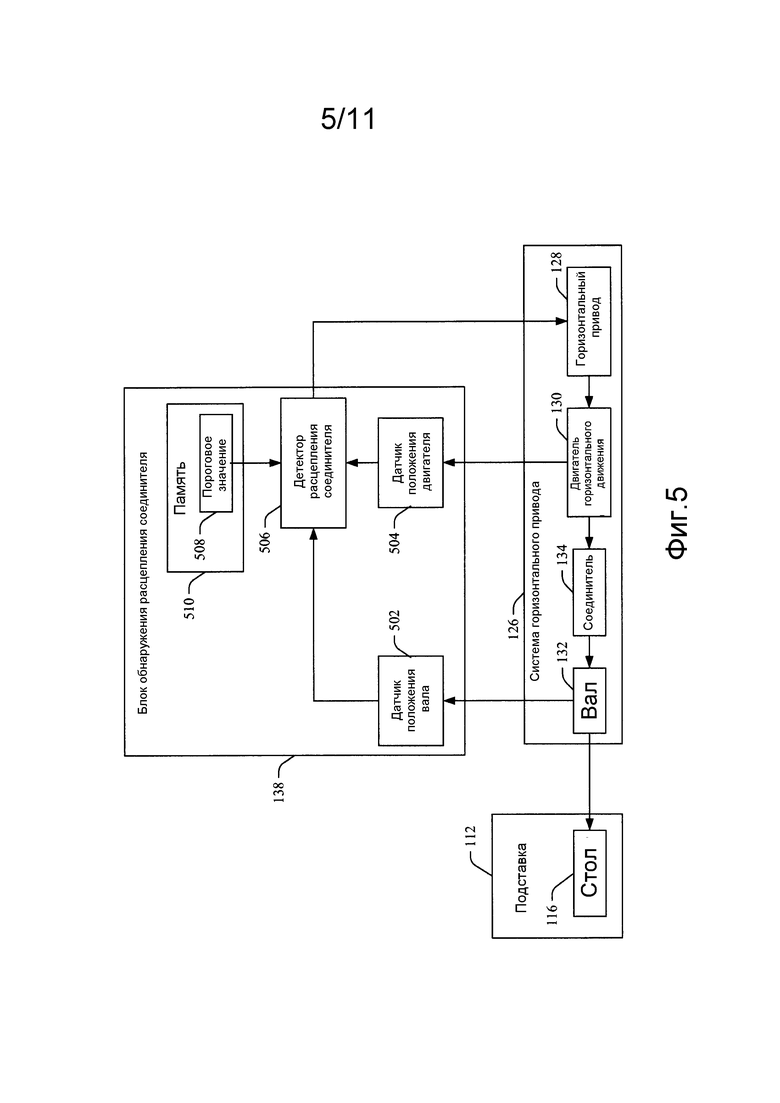
Фиг.5 - схематическое представление примера блока обнаружения расцепления соединителя, имеющего множество датчиков положения, которое может быть использовано в соединении с системой формирования изображений на фиг.1.
Фиг.6 - схематическое представление примера блока обнаружения расцепления соединителя, имеющего датчик тока, которое может быть использовано в соединении с системой формирования изображений на фиг.1.
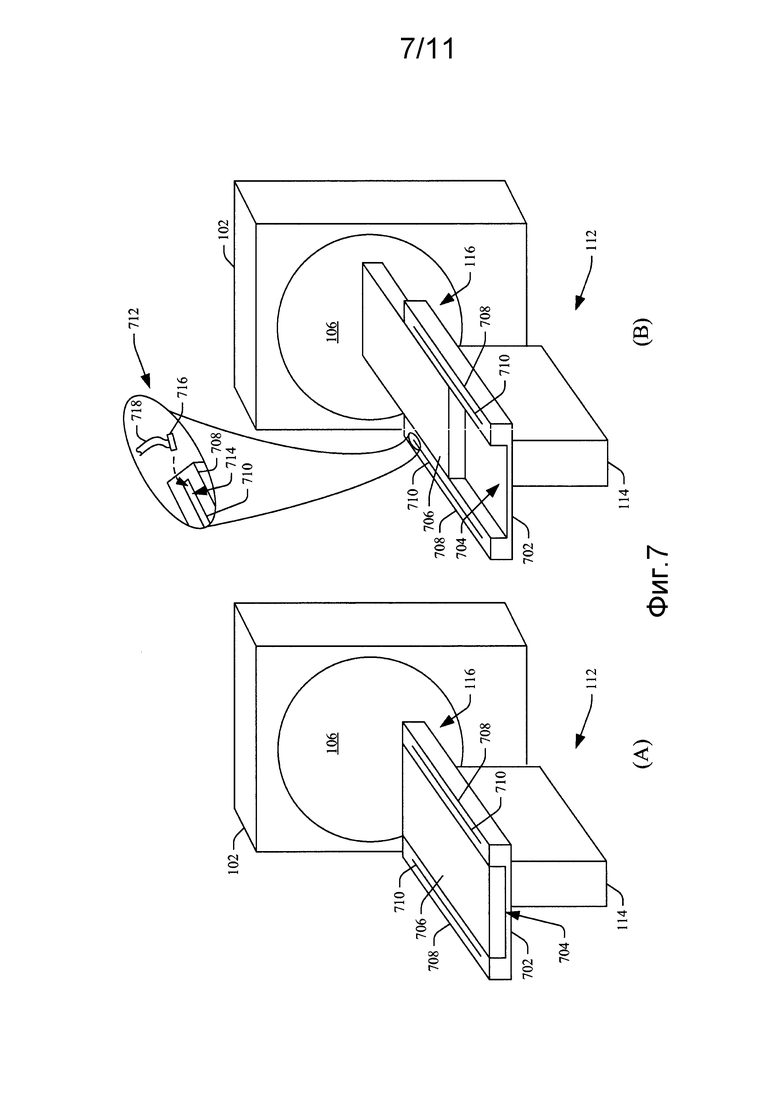
Фиг.7 - схематическое представление примера подставки, которая может быть использована в соединении с системой формирования изображений на фиг.1.
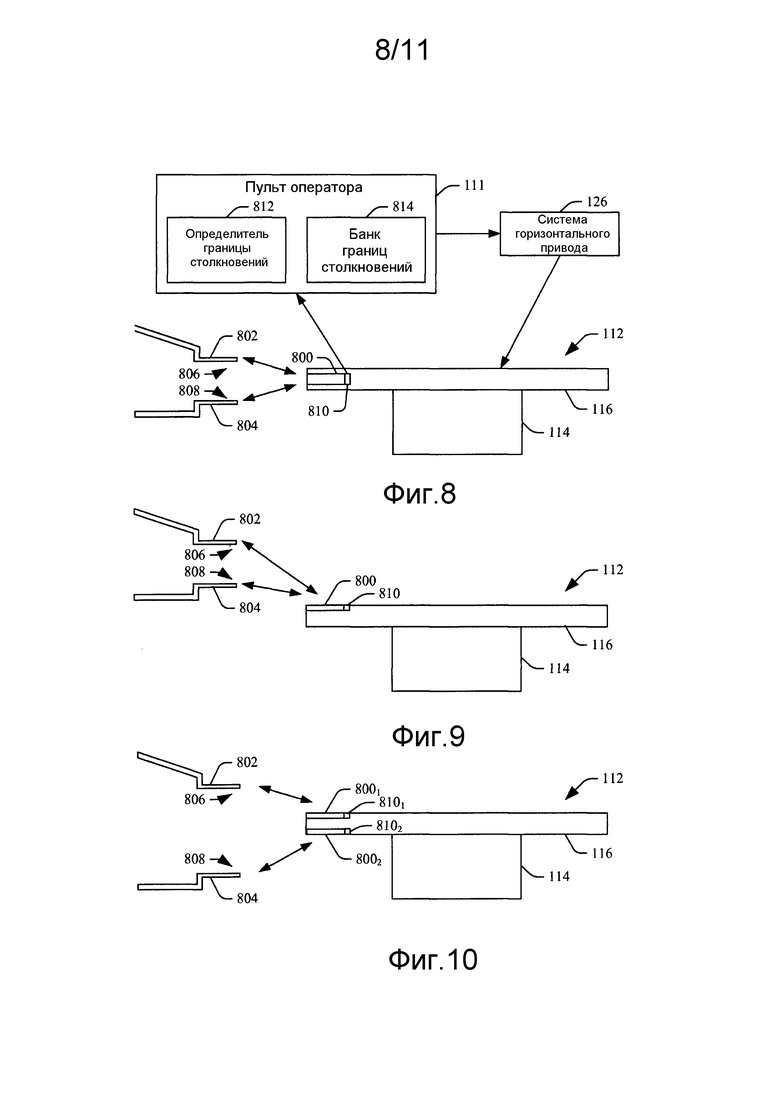
Фиг.8, 9 и 10 - схематическое представление примера подставки, которая может быть использована в соединении с системой формирования изображений на фиг.1.
Фиг.11 - представление способа остановки движения стола в ответ на управляемое или неуправляемое отключение электропитания.
Фиг.12 - представление способа смягчения горизонтальных столкновений стола подставки.
Фиг.13 - представление способа смягчения вертикальных столкновений подставки.
Фиг.14 - представление способа обнаружения расцепления системы горизонтального привода за счет использования множества датчиков и отключения или прекращения приведения в движение стола в ответ на это.
Фиг.15 - представление способа обнаружения расцепления системы горизонтального привода за счет использования одного датчика и отключения или прекращения приведения в движение стола в ответ на это.
Фиг.16 - представление способа обнаружения физического прикрепления и/или снятия приспособлений с подставки и определения подходящей границы столкновений на основе этого.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На фиг.1 схематично представлена система 100 формирования изображений, такая как сканер для компьютерной томографии (КТ). Система 100 формирования изображений включает в себя неподвижный гентри 102 и поворотный гентри 104, который поддерживается с возможностью поворота неподвижным гентри 102. Поворотный гентри 104 поворачивается вокруг зоны 106 обследования относительно продольной или Z-оси.
Источник 108 излучения, такой как рентгеновская трубка, поддерживается и поворачивается поворотным гентри 104 вокруг зоны 106 обследования. Источник 108 излучения испускает излучение, которое коллимируется коллиматором источника, образуя в общем случае веерообразный, клинообразный, конусообразный или имеющий другую форму луч излучения, который пересекает зону 106 обследования. Воспринимающая излучение детекторная матрица 110 включает в себя одномерную или двухмерную матрицу пиксельных детекторов, которые соответственно детектируют излучение, пересекающее зону 106 обследования, и генерируют электрический сигнал, определяющий детектированное излучение.
Восстанавливающее устройство 109 восстанавливает сигнал, генерируемый детекторной матрицей 110, и генерирует данные волюметрического изображения, определяющие зону 106 обследования. Компьютерная система общего назначения служит в качестве пульта 111 оператора и включает в себя выходное устройство, такое как дисплей, входное устройство, такое как клавиатура, мышь и т.п., один или более процессоров и машиночитаемый носитель данных. Пульт 111 позволяет оператору управлять работой системы 100, например, выбирать протокол сканирования, инициировать сканирование и т.п.
Подставка 112, такая как кушетка пациента, служит опорой для объекта или субъекта в зоне 106 обследования. Подставка 112 включает в себя основание 114 и стол 116. Основание 114 прикреплено к опорам на полу в помещении для обследования и выполнено с возможностью перемещения по вертикали вниз и вверх для укладывания и выгрузки пациента, и для расположения пациента на удобной высоте для сканирования, основываясь, например, на подлежащей сканированию области, изоцентре поля обзора при сканировании и/или других факторах. Система 118 вертикального привода включает в себя контроллер 120 вертикального привода, который приводит в действие двигатель 122 вертикального движения, приводящий в действие механизм, который поднимает и опускает основание 114.
Блок 124 предотвращения вертикального столкновения может избирательно останавливать управляемое перемещение по вертикали подставки 112. Как будет описано более подробно ниже, в одном примере это включает в себя обнаружение ситуации, когда подставка 112 сталкивается с внешним объектом во время перемещения по вертикали, и отключение или остановку в ответ на это контроллера 120 вертикального привода от дальнейшего приведения в действие двигателя 122 вертикального движения. Заметим, что использование термина "вертикальный" применительно к приводной системе 118, контроллеру 120, двигателю 122 и блоку 124 предотвращения столкновения относится к вертикальному (вверх и вниз) перемещению, а не к какой-либо специальной ориентации компонентов.
Стол 116 подвижно прикреплен к основанию 114 и выполнен с возможностью горизонтального перемещения внутри и снаружи зоны 106 обследования до, во время и после сканирования с целью укладывания на него пациента, сканирования пациента и выгрузки пациента. Система 126 горизонтального привода включает в себя контроллер 128 горизонтального привода, который приводит в действие двигатель 130 горизонтального движения, подсоединенный к концу удлиненного вала 132 через соединитель 134, при этом второй конец вала 132 подсоединен к столу 116 через хомутовую перемычку или т.п. В общем случае контроллер 128 горизонтального привода приводит в действие двигатель 130, который поворачивает соединитель 134 и, следовательно, вал 132, который, в свою очередь, перемещает стол 116 по горизонтали.
Как описано более подробно ниже, стол 116 может включать в себя или быть связанным с различными признаками, такими как быть электрически непроводящим, быть заземленным, быть изолированным, быть выполненным с возможностью размещения на нем электрически непроводящих устройств, на которые укладывается пациент, включая сюда стационарную и/или съемную дополнительную подставку для пациента, включающую в себя механизм для присоединения, закрепления, удаления, определения и т.п. одной или более принадлежностей, таких как подголовники, подножки и т.п. и/или для присоединения и/или удаления одного или более приспособлений, определяющих границы столкновений, выдающих рекомендации по границам столкновений, смягчающих столкновения, и т.п. автоматически и/или в ответ на подтверждение оператора.
Блок 136 предотвращения горизонтального столкновения может избирательно останавливать перемещение по горизонтали подставки 112. Как описано более подробно ниже, в одном случае это включает в себя обнаружение ситуации, когда подставка 112 сталкивается с внешним объектом во время горизонтального перемещения, и отключение или прекращение приведения в действие двигателя 130 горизонтального движения в ответ на это. Блок 138 обнаружения расцепления соединителя может также избирательно останавливать приведение в действие двигателя 130 горизонтального движения. Как описано более подробно ниже, в одном примере это включает в себя обнаружение расцепления между соединителем 134 и по меньшей мере либо двигателем 130, либо валом 132, и отключение или прекращение приведения в действие двигателя 130 горизонтального движения в ответ на это. Заметим, что использование термина "горизонтальный" применительно к приводной системе 126, контроллеру 128, двигателю 130 и блоку 136 предотвращения столкновения относится к горизонтальному (вперед и назад по оси z) перемещению, а не к какой-либо специальной ориентации компонентов.
Схема 140 аварийной остановки (E-stop) включает в себя электрическую схему, которая обнаруживает неуправляемое и/или управляемое пользователем отключение электропитания от одного или более компонентов системы 100. В рассматриваемом варианте реализации E-stop схема 140 является выделенной нормально замкнутой (или разомкнутой) цепью электрического тока, связывающей между собой различные выключатели аварийной остановки системы 100. Один такой выключатель 142 показан расположенным на неподвижном гентри 102. Другие выключатели могут располагаться внутри или снаружи зоны обследования, на пульте 111 оператора и в других местах. Размыкание выключателя 142 прерывает протекание электрического тока в E-stop схеме 140. При нормально замкнутой цепи электрический ток будет протекать в E-stop схеме 140, когда подается электропитание и ни один E-stop выключатель не находится в разомкнутом состоянии. Протекание тока прекращается в ответ на электрическое размыкание E-stop схемы, например, за счет приведения в действие выключателя 142.
Блок 144 обнаружения аварийной остановки (E-stop) может избирательно останавливать приведение в действие двигателя 130 горизонтального движения. Как описано более подробно ниже, в одном случае это включает в себя мониторинг E-stop схемы 140 с целью обнаружения прерывания потока электрического тока в E-stop схеме и отключение или остановку контроллера 128 горизонтального привода от приведения в действие двигателя 130 горизонтального движения, и/или устранение регенерированного двигателем тока из обмотки двигателя 130 горизонтального движения в ответ на это и, опционально, расположение стола в свободном состоянии после того, как стол остановится, и/или по истечении заданного времени.
На фиг.2 представлен неограничивающий пример блока 144 обнаружения аварийной остановки вместе с одним участком E-stop схемы 140 и системой 126 горизонтального привода. В этом примере двигатель 130 горизонтального движения является трехфазным серводвигателем переменного тока с постоянными магнитами. В других вариантах реализации могут быть использованы другие двигатели, такие как бесколлекторный двигатель постоянного тока, коллекторный двигатель постоянного тока с постоянными магнитами и/или другой двигатель. Кроме того, должно быть понятно, что описываемый ниже вариант реализации блока 144 обнаружения аварийной остановки представлен в целях пояснения и не является ограничивающим и что другие варианты реализации также подразумеваются здесь.
Блок 144 обнаружения аварийной остановки включает в себя датчик 202 электрического тока, который обнаруживает поток электрического тока в E-stop схеме и изменение при этом электрического состояния. В рассматриваемом варианте реализации датчик 202 электрического тока включает в себя датчик на эффекте Холла, который преобразует ток, протекающий по замкнутой E-stop схеме, в сигнал с высоким потенциалом (E-Stop-Ok), а отсутствие тока - в сигнал с низким потенциалом (E-Stop-Not-Ok).
Например, сигнал от датчика 202 электрического тока подается на переключатель 204, который включает контроллер 128 горизонтального привода на приведение в действие двигателя 130 горизонтального движения, когда переключатель 204 принимает как сигнал(ы) включения, так и E-Stop-Ok сигнал. Если не принят либо сигнал включения, либо E-Stop-Ok сигнал (или принят сигнал E-stop-Not-Ok), контроллер 128 горизонтального привода отключается от приведения в действие двигателя 130 горизонтального движения. В одном случае это включает в себя отключение выхода контроллера 128 горизонтального привода, так что он электрически отсоединяется от двигателя 130 горизонтального движения, например, в течение одного цикла приводного периода выборки или на время в диапазоне от половины миллисекунды (0,5 мс) до десяти миллисекунд (10 мс), от трех четвертей миллисекунды (0,75 мс) до семи миллисекунд (7 мс), от одной миллисекунды (1 мс) до четырех миллисекунд (4 мс) и/или в другом диапазоне, например, в зависимости от продолжительности приводного цикла.
Сигнал от датчика 202 электрического тока подается также на схему 206 замыкания обмотки двигателя, которая замыкает и размыкает нормально замкнутый (NC) выключатель (например, MOSFET - полевой транзистор со структурой металл-окисел-полупроводник в этом примере) 208 и размыкает и замыкает нормально разомкнутый (NO) выключатель (MOSFET) 218, чтобы выключить нормально разомкнутый выключатель 218.
Когда NC выключатель 208 замкнут, а NO выключатель 218 разомкнут, устройство с накоплением заряда, такое как конденсатор 210, заряжается от источника 216 постоянного тока или от другого источника электропитания. Как показано, конденсатор 210 может заряжаться через диод 212 и зарядный резистор 214. Однако здесь также предполагаются и другие варианты реализации. При нахождении выключателей в таких состояниях электрический ток не течет через NO выключатель 218 в переключающее устройство 220 (например, IGBT - биполярный транзистор с изолированным затвором, SSR - твердотельное реле и т.п.) мостиковой схемы, и поэтому нормально разомкнутая мостиковая схема 222 (трехфазная в рассматриваемом примере), выполненная с возможностью электрического соединения обмотки двигателя 130 горизонтального движения с резистивной нагрузкой 224 (например, резистором), не замыкается или не активизируется. Мостиковая схема 222, будучи разомкнутой, выполнена с возможностью разрешения контроллеру 128 горизонтального привода приводить в действие двигатель 130 горизонтального движения, когда переключатель 204 принимает как сигнал включения, так и E-Stop-Ok сигнал.
Когда NC выключатель 208 разомкнут, а NO выключатель 218 замкнут, устройство 210 с накоплением заряда больше не заряжается. Вместо этого заряд устройства 210 с накоплением заряда подает напряжение на NO выключатель 218, и электрический ток течет в переключающее устройство 220 мостиковой схемы, которое замыкается и позволяет мостиковой схеме 220 электрически подсоединять обмотки двигателя к резистивной нагрузке 224 (например, резистору). Как и в предыдущем случае, переключатель 204 также размыкается в ответ на E-stop-Not-Ok сигнал и контроллер 128 горизонтального привода не приводит в действие двигатель 130 горизонтального движения. Однако регенерированный ток от обмотки двигателя 130 горизонтального движения будет протекать через мостиковую схему 222 к резистивной нагрузке 224 непосредственно или же через один или более компонентов, таких как выпрямитель, чтобы отвести регенерированный электрический ток посредством рассеяния в виде тепла, что замедляет и останавливает двигатель 130 горизонтального движения. При использовании внешнего вспомогательного электромагнитного тормоза (не показан) конденсатор 210 также используется для подачи напряжения на обмотку 226 электрического тормоза для вспомогательного торможения с целью дальнейшего торможения двигателя 130 горизонтального движения. Разрядный резистор 228 облегчает разрядку зарядного конденсатора 210. Когда конденсатор 210 полностью разрядится, мостиковая схема 222 снова размыкается и внешний тормоз (если он используется) снимается, двигатель 130 переходит в свободное состояние, в котором стол может легко передвигаться уполномоченным персоналом, например, нажатием или оттягиванием стола 116.
Должно быть понятно, что сказанное выше применимо к управляемым изменениям состояния E-stop схемы 140, например, когда оператор системы физически воздействует на E-stop выключатель 142, например, нажимая, оттягивая или активируя выключатель 142, так или иначе приводя выключатель 142 в действие, и к неуправляемым аварийным остановкам, например, во время неуправляемого пропадания или отключения электропитания. При этом блок 144 обнаружения аварийной остановки обеспечивает пассивную, безопасную схему в различных ситуациях потери электропитания.
В рассматриваемом варианте реализации NC и NO выключатели 208 и 218 являются слаботочными переключающими устройствами зарядки и разрядки, а мостиковая схема 222 используется для сильных токов рекуперативного торможения двигателя. Когда уровень тока рекуперативного торможения двигателя понижается, мостиковая схема 222 может альтернативно быть слаботочным устройством, таким как MOSFET или т.п. Кроме того, когда двигатель 130 горизонтального движения является коллекторным двигателем постоянного тока с постоянным магнитами, однофазное переключающее мостиковое устройство или другой мостик можно использовать вместо трехфазного мостикового устройства 222.
Должно быть понятно, что использование выделенной E-stop схемы 140 сокращает время, затрачиваемое на отключение контроллера 128 горизонтального привода и шунтирование двигателя 130 горизонтального перемещения, по сравнению с невыделенной схемой аварийной остановки, которая обнаруживает аварийные ситуации. Кроме того, все MOSFET, SSR и IGBT устройства являются полупроводниковыми устройствами, которые могут включаться и выключаться за наносекунды или микросекунды, так что быстрота реакции рекуперативного торможения является по существу гарантированной.
В общем случае величины конденсатора 210, тормозного резистора 214, тормозной обмотки 226, зарядного резистора 214 и разрядного резистора 228 являются такими, чтобы перемещение по горизонтали останавливалось в пределах заданного расстояния (например, от 1 до 50 мм, скажем через 50 мм, 25 мм, 10 мм, 7 мм, 1 мм, и т.п.) и/или в течение заданного времени (например, от 1 до 10 мс, скажем, через 5, 4, 3, 2 или 1 мс). Ниже представлен в качестве примера подход к определению различных параметров компонентов, таких как электрические и механические параметры двигателя и тормоза в зависимости от массы пациента, скорости, дистанции торможения и/или других критериев. В одном случае может рассматриваться компромисс между пиковым уровнем замедления и динамическим торможением двигателя, которое влияет на безопасность пациента, и комфортностью стола.
В этом примере параметры определяются по уравнению 1.
УРАВНЕНИЕ 1:
где Ke - коэффициент противо-ЭДС двигателя Y, Kf - крутящий момент или постоянная линейно изменяющийся силы двигателя Y, R - общее сопротивление, определяемое сопротивлением двигателя и сопротивлением тормозного резистора, М - сила инерции механической системы и двигателя, 

Из уравнения 1 дистанция торможения стола при чистом динамическом торможении может быть определена из уравнения 2.
УРАВНЕНИЕ 2:

где 

УРАВНЕНИЕ 3:

где 

Из приведенных выше уравнений следует, что более высокие начальная скорость и противо-ЭДС двигателя и постоянная крутящего момента будут создавать более высокое начальное пиковое замедление, что резко скажется на ощущении комфортности пациентом, а более высокие сила инерции и сопротивление обеспечат меньшее начальное замедление. Из приведенных выше уравнений также следует, что уровень замедления линейно уменьшается до нуля, когда скорость приближается к нулю. Если уровень начального пикового замедления при динамическом торможении слишком высок для того, чтобы достижение заданной дистанции торможения при заданной начальной скорости движения стола было комфортным для пациента, может быть использован внешний вспомогательный тормоз, чтобы сделать замедление более плавным, что приведет в результате к более плавному замедлению в течение всего процесса торможения.
Пороговая частота системы динамического торможения определяется как 

На фиг.3 схематично представлен пример блока 136 предотвращения горизонтального столкновения в соединении с системой 126 горизонтального привода и подставкой 112. В общем случае горизонтальный привод 128 запрограммирован на приведение в действие двигателя 130 горизонтального движения с соответствующим электрическим током или крутящим моментом, чтобы достичь запланированного перемещения стола 116 при сканировании, включая сюда ускорение и замедление для преодоления силы трения приводной цепи и нагрузки, создаваемой пациентом.
Рассматриваемый блок 136 предотвращения горизонтального столкновения включает в себя датчик 302, выполненный с возможностью считывания положения двигателя. Подходящий датчик включает в себя, не ограничиваясь этим, угловой кодер, который может быть прикреплен к валу двигателя и преобразует вращательное движение вала двигателя в линейное положение стола 116. Детектор 304 горизонтального столкновения сравнивает считанное положение стола 116 с ожидаемым положением 306 стола из памяти 308 (например, локального или удаленного запоминающего устройства) и генерирует разностный сигнал, определяющий разность между ожидаемым положением 308 и считанным положением. Блок 136 предотвращения горизонтального столкновения сравнивает разностный сигнал с диапазоном 310 ошибок отслеживания горизонтального положения стола из памяти 308. Блок 136 предотвращения горизонтального столкновения, в ответ на разностный сигнал, выходящий за пределы диапазона 310, посылает сигнал управления в систему 126 горизонтального привода, которая отключает или останавливает горизонтальный привод 128 от приведения в действие двигателя 130 горизонтального движения, останавливая тем самым активное перемещение стола 116.
В одном случае диапазон 310 ошибок отслеживания горизонтального положения стола является заданной фиксированной величиной, которая не зависит от скорости движения стола. В другом случае диапазон 310 ошибок отслеживания горизонтального положения стола является переменным в том отношении, что ширина диапазона ошибок положения зависит от скорости движения стола. В этом случае переменный диапазон 310 ошибок отслеживания горизонтального положения стола может быть представлен как математическая функция или алгоритм, в котором детектор 304 горизонтального столкновения динамически вычисляет диапазон 310 ошибок отслеживания горизонтального положения стола в ответ на прием сигнала (например, от пульта оператора или от другого источника), указывающего скорость стола 116 при сканировании, которая может быть определена на основе протокола формирования изображений, выбранного для сканирования, или другим образом. В другом примере переменный диапазон 310 ошибок отслеживания горизонтального положения стола введен в просмотровую таблицу (LUT), в которой совместно рассматриваются или отображаются значения диапазона ошибок отслеживания и скорость движения стола. Ожидаемое положение 306 стола может быть определено исходя из выбранного протокола сканирования или другим образом.
Типовой сценарий, который может привести в результате к разностному сигналу, выходящему за пределы диапазона 310, происходит тогда, когда внешняя сила 312 прикладывается к столу 116 и сдерживает или замедляет движение стола. Такая ситуация может возникать, когда внешний объект, такой как участок тела человека, оборудования и т.п., встает на пути движения стола и препятствует движению. В такой ситуации этот объект прикладывает силу к движущемуся столу 116, стол 116 замедляет движение или останавливается, датчик 302 обнаруживает ошибку положения, которая накапливается с течением времени, и, когда разностный сигнал выходит за пределы диапазона 310 ошибок отслеживания, детектор 304 горизонтального столкновения посылает сигнал, который отключает или останавливает горизонтальный привод 128 от приведения в действие двигателя 130 горизонтального движения. Если никакой такой объект не преграждает путь или если объект удален с пути до того, как положение достигнет диапазона 310 ошибок положения, детектор 304 горизонтальных столкновений не будет препятствовать горизонтальному приводу 128 приводить в действие двигатель 130 горизонтального движения.
На фиг.4 схематично представлен пример блока 136 предотвращения вертикального столкновения в соединении с системой 118 вертикального привода и подставкой 112. В общем случае вертикальный привод запрограммирован на приведение в действие двигателя 122 вертикального движения, чтобы опускать и поднимать основание 114 и, следовательно, стол 116 для укладывания и выгрузки пациента.
Блок 136 предотвращения вертикального столкновения включает в себя по меньшей мере один выключатель 402, прикрепленный к столу 116 и/или основанию 114 между столом 116 и/или основанием 114 и полом, к которому прикреплена подставка 112, например, на внешних крышках подставки 112. Подходящие выключатели включают в себя нормально разомкнутые или нормально замкнутые выключатели, которые изменяют состояние или переходят в замкнутое или разомкнутое состояние в ответ на приложение внешней силы. Такое обнаружение может быть достигнуто через физический контакт, например, когда один или более выключателей включают в себя выключатели с контактной лентой или фиксирующей пружиной или через другой механизм, например, оптическим, магнитным способом и т.п.
Детектор 404 вертикальных столкновений обнаруживает, когда один или более выключателей 404 срабатывают и изменяют состояние от нормального рабочего состояния к переключенному состоянию, и генерирует и передает сигнал управления, который заставляет вертикальный привод 120 отключить или остановить приведение в действие двигателя 122 вертикального движения и, следовательно, перемещение основания 114 и стола 116 в вертикальном направлении. Детектор 404 вертикального столкновения не генерирует этот сигнал или не генерирует сигнал, который заставляет вертикальный привод 120 прекращать приведение в действие двигателя 122 вертикального движения в том случае, если выключатель остается в нормальном рабочем состоянии.
Типовой сценарий может включать в себя электронно-управляемое опускание основания 114 и, следовательно, стола 116, когда внешний объект, такой как стул или другой объект, расположен между столом и полом, и один или более выключателей 142, прикрепленных к столу 116, физически контактируют со стулом, что вызывает внешнюю противодействующую силу 406. В этом случае детектор 404 вертикального столкновения обнаруживает изменение состояния одного или более выключателей 402 и генерирует и посылает сигнал управления в вертикальный привод 120, чтобы остановить вертикальный привод, управляющий двигателем 122 вертикального движения, и, следовательно, предотвратить столкновение стола 116 со стулом.
Применительно к фиг.3 и 4 электрический ток, скорость и/или другой параметр могут дополнительно или альтернативно использоваться, чтобы обнаружить столкновение.
На фиг.5 схематически представлен пример блока 138 обнаружения расцепления соединителя горизонтального привода вместе с системой 126 горизонтального привода и подставкой 112. Как было сказано выше, контроллер 128 горизонтального привода приводит в действие двигатель 130 горизонтального движения (который связан с валом 132 через соединитель 134), который вращает вал 132, чтобы перемещать стол 116.
Рассматриваемый блок 138 обнаружения расцепления соединителя горизонтального привода включает в себя по меньшей мере датчик 502 положения вала и датчик 504 положения двигателя. Датчик 502 положения вала определяет горизонтальное положение стола по положению вала 132 и генерирует на основе этого первый сигнал положения стола, а датчик 504 положения двигателя определяет горизонтальное положение стола по положению двигателя 130 горизонтального движения и генерирует на основе этого второй сигнал положения стола. В рассматриваемом варианте реализации датчики 502 и 504 включают в себя угловые кодеры, которые преобразуют вращательное движение вала и двигателя в линейное положение. В общем случае использование угловых кодеров может снизить общую стоимость системы по сравнению с конфигурацией с линейными кодерами и исключить необходимость в редукторе или ременном приводе.
Детектор 506 расцепления соединителя определяет разностный сигнал, указывающий разность положений между положениями, считываемыми датчиками 502 и 504. Детектор 506 расцепления соединителя сравнивает разностный сигнал с заданным пороговым значением 508 разности положений из памяти 510. Детектор 506 расцепления соединителя, в ответ на совпадение и/или превышение разностным сигналом заданного порогового значения разности положений, передает сигнал в горизонтальный привод 128, который, в ответ на это, отключает или перестает приводить в действие двигатель 130 горизонтального движения. В противном случае детектор 506 расцепления соединителя не передает этот сигнал.
Типовой сценарий может включать в себя ситуацию, в которой соединение между валом 132 и соединителем 134 и/или двигателем 130 горизонтального движения и соединителем 134 оказывается расцепленным, так что двигатель 130 больше не обеспечивает вращение или правильное вращение вала 132 и, следовательно, перемещение стола 116 в соответствии с профилем перемещения во время сканирования. В этом случае разностный сигнал будет возрастать с течением времени, и горизонтальный привод 128 в ответ на прием разностного сигнала, указывающего на то, что разностный сигнал совпадает или превышает заданное пороговое значение 508 разности положений, останавливает приведение в действие двигателя 130 горизонтального движения.
На фиг.6 схематично представлен другой пример блока 138 обнаружения расцепления соединителя горизонтального привода в сочетании с системой 126 горизонтального привода и подставкой 112. В рассматриваемом примере шаг винта вала 132 является таким, что сила обратного хода стола 116 относительно мала и инерция двигателя 130 относительно мала. Вследствие этого общая инерция системы, даже при отсутствии на столе 116 нагрузки, создаваемой пациентом, больше, чем общая инерция двигателя 130 и вала 132 по отдельности. Эта разность инерций приводит в результате к измеримой разности электрических токов двигателя между электрическим током, который течет, когда соединитель 134 прикреплен к двигателю 130 и валу 132, и электрическим током, который течет, когда соединитель 134 отсоединен по меньшей мере либо от двигателя 130, либо от вала 132.
Блок 138 обнаружения расцепления соединителя включает в себя датчик 602 электрического тока, который обнаруживает электрический ток, текущий через двигатель 130 горизонтального движения. Детектор 506 расцепления соединителя сравнивает обнаруженный электрический ток с разностным пороговым значением 504 электрического тока, хранимым в памяти 510. Детектор 506 расцепления соединителя, в ответ на совпадение или превышение обнаруженным электрическим током порогового значения 504 электрического тока, генерирует и передает сигнал, который заставляет горизонтальный привод 128 в ответ на него отключать или останавливать приведение в действие двигателя 130 горизонтального движения. Смещение среднего тока двигателя свыше заданного диапазона времени может быть использовано для снижения возможных эффектов токовых шумов двигателя и настройки контура управления. В противном случае детектор 506 расцепления соединителя не генерирует и не передает сигнал или генерирует сигнал, указывающий, что считанный электрический ток удовлетворяет заданному пороговому значению 604 электрического тока.
На фиг.7(А) и 7(В) соответственно показаны виды в перспективе подставки 112 со столом 116 в сдвинутом положении, в котором стол 116 не находится внутри зоны 106 обследования, и в раздвинутом положении, в котором стол 116 находится внутри зоны 106 обследования.
В рассматриваемом варианте реализации стол 116 включает в себя лоток 702, неподвижно закрепленный на основании 114, и полость 704, по которой скользит каретка 706 для субъекта обследования (далее - каретка). Каретка 706 прикреплена к валу 132 (фиг.1) системы 126 (фиг.1) горизонтального привода, и каретка 706 перемещается вперед и назад в полости 704, вдвигаясь и выдвигаясь из зоны 106 обследования системой 126 (фиг.1) горизонтального привода, как описано здесь.
В рассматриваемом варианте реализации каретка 706 является электрически непроводящей. В одном случае это достигается за счет использования внешней электрически непроводящей поверхности (например, стекловолоконного слоя, покрытия и т.п.), окружающей или ограничивающей электрически проводящую в отличие от нее или электрически непроводящую сердцевину (не показана) по меньшей мере с одной стороны каретки 706, на которой располагается пациент во время сканирования. В другом случае каретка 706 выполнена из электрически непроводящего материала. Еще в одном случае электрически непроводящее приспособление, такое как мягкая прокладка, настил и т.п., может быть расположено между кареткой 706 и пациентом на столе 116, так что пациент будет находиться только на электрически непроводящем приспособлении.
Должно быть понятно, что электрически непроводящая поверхность, каретка 706 и/или приспособление позволяют использовать дефибриллятор или же другое высоковольтное или вырабатывающее заряд устройство применительно к пациенту, лежащему на столе 116, например, без риска поражения током докторов или медицинских сестер, или другого персонала, которому приходится соприкасаться со столом пациента. В другом варианте реализации каретка 706 является приспособлением на основе углерода, которое может быть электрически проводящим. В этом варианте реализации каретка 706 может быть электрически заземлена или электрически изолирована. Дополнительно или альтернативно может быть использовано электрически непроводящее приспособление.
Описанное выше может пригодиться в различных ситуациях, таких как травматические ситуации. В качестве неограничивающего примера, если пациент был доставлен на стол 116 для сканирования и сердце пациента перестало биться, дефибриллятор на прикроватной тележке или установленный на столе 116 может быть использован для восстановления ритма сердца пациента без риска поражения током персонала в помещении для обследования, который может находиться в состоянии физического контакта со столом 116. В конфигурациях, в которых стол 116 не включает в себя электрически непроводящую поверхность, пациент должен быть перемещен со стола 116 на другую опорную поверхность, чтобы снизить риск электрического удара из-за электрически проводящей поверхности стола 116.
Показанный лоток 702 включает в себя борта 708 на каждой стороне полости 704, которые могут быть использованы в качестве дополнительной опоры для поддержки пациента, например, в качестве опор для рук пациента, лежащего на каретке 706. В этом варианте реализации борта 708 физически являются составной частью лотка 702. В другом случае борта 708 являются частью ограждения, прикрепленного к подставке 112. Еще в одном случае борта 708 являются частью приспособлений, которые могут подсоединяться и отсоединяться от подставки 112 оператором системы или другим персоналом до и/или после каждого сканирования. В другом варианте реализации борта 708 отсутствуют.
Показанные борта 708 включают в себя по меньшей мере один механизм 710 для установки приспособлений. В рассматриваемом примере каждый из бортов 708 включает в себя механизм 710 для установки приспособлений. По меньшей мере один механизм 710 для установки приспособлений может быть использован для съемной установки приспособления, которое облегчает сканирование и/или поддержание пациента на каретке и/или в нужном положении на каретке 706. В качестве неограничивающего примера позицией 712 обозначен участок механизма 710 для установки приспособления, имеющий прорезь 714, продолжающуюся вдоль длинной оси подставки 112. Прорезь 714 выполнена с возможностью вставления в нее соединителя 716, прикрепленного к концу приспособления, такого как приспособление 718 для удержания пациента.
В рассматриваемом варианте реализации соединитель 716 является прямоугольным элементом, который вдвигается в прорезь 714; для этого элемент 716 поворачивается таким образом, что его длинная ось выравнивается с длинной осью подставки 112. Затем элемент 716 поворачивается, чтобы закрепить элемент 716 в прорези 714 и тем самым прикрепить приспособление 718 для удержания пациента к подставке 112. Внутри прорези 714 элемент 716 может скользить вдоль длинной оси, что позволяет динамически и избирательно располагать приспособление 718 для удержания пациента вдоль длинной оси. Для того чтобы удалить приспособление 718 для удержания пациента, элемент 716 поворачивается таким образом, чтобы его длинная ось выравнивалась с длинной осью подставки 112, и элемент 716 извлекается из прорези 714.
Показанные механизм 710 для установки приспособлений и приспособление 718 представлены в целях пояснения и не являются ограничивающими. В другом варианте реализации механизм 710 для установки приспособлений и/или приспособление 718 могут быть другими. Например, приспособление 718 может быть любым известным приспособлением, используемым с системой формирования изображений, и/или другим приспособлением, а механизм 710 для установки приспособлений будет зависеть от типа приспособления и способа прикрепления приспособления к подставке 112. В качестве одного неограничивающего примера альтернативный механизм 710 для установки приспособлений может включать в себя крепежную деталь в виде крюка или петли.
На фиг.8, 9 и 10 показаны дополнительный или альтернативный механизм 800 для установки приспособлений на подставке и различные приспособления, такие как удлинитель 802 для ног, подголовник 804 и/или другие приспособления.
Согласно фиг.8 приспособления 802 и 804 включают в себя концы 806 и 808, выполненные с возможностью сочленения с установочным механизмом 800. Любой или оба конца 806 и 808 или установочный механизм 800 включают в себя датчик, такой как электрический, магнитный, механический (например, выключатель) и/или другой датчик. В рассматриваемом варианте реализации датчик 810 показан в соединении с установочным механизмом 800. Датчик 810 обнаруживает физическое соединение между концом 806 или 808 и установочным механизмом 800. В ответ на это датчик 810 посылает сигнал в пульт 111 оператора, указывающий на то, что приспособление прикреплено к подставке 112.
В рассматриваемом варианте реализации приспособления 802 и 804 включают в себя механизм, который однозначно определяет приспособление. Например, приспособление 802 может включать в себя механизм, который однозначно определяет его как подголовник или конкретный подголовник, а приспособление 804 может включать в себя механизм, который однозначно определяет его как подножку или конкретную подножку. В одном случае этот механизм является физической структурой, такой как форма, ярлык, выемка, и т.п. В этом случае датчик 810 выполнен с возможностью считывания физической структуры и генерации сигнала, указывающего на то, что физическая структура считана. В другом случае датчик 810 считывает данные из памяти, штриховой код и т.п. и передает данные или генерирует сигнал, определяющий эти данные.
В рассматриваемом варианте реализации пульт 111 оператора включает в себя определитель 812 границы столкновений и банк 814 границ столкновений, содержащий одну или более границ столкновений. В общем случае граница столкновений определяет допустимое сочетание перемещений по вертикали и горизонтали основания 114 и стола 116, с тем чтобы смягчить столкновение стола 116 и находящегося на нем пациента с неподвижным и/или поворотным гентри 102 и 104 и/или другой структурой. Определитель 812 границы столкновений определяет подходящую границу столкновений из банка 814 на основе сигнала от датчика 810 и извещает систему 126 горизонтального привода о границе столкновений, подлежащей использованию при сканировании. Когда начальная граница столкновений выбирается на основе выбранного протокола сканирования, этот сигнал может быть использован для замены начальной границы той границей, которая определена определителем 812 границы столкновений. Замена может быть автоматической или потребуется вмешательство оператора для подтверждения замены. Когда приспособление удаляется, пульт 111 оператора может продолжать использовать определенную границу столкновений, выбрать другую границу столкновений для использования, использовать границу столкновений по умолчанию, и т.п.
На фиг.8 установочный механизм 800 и датчик 810 показаны расположенными внутри стола 116, а приспособления 802 и 804 вставляются в стол 116 с передней стороны стола. На фиг.9 установочный механизм 800 и датчик 810 расположены на верхней поверхности стола 116, а приспособление 802 прикрепляется к столу 116 со стороны верхней поверхности. Альтернативно установочный механизм 800 и датчик 810 могут располагаться на нижней поверхности стола 116, где приспособление 802 прикрепляется к столу 116 со стороны нижней поверхности. На фиг.10 показан пример, в котором установочный механизм 800 включает в себя первый и второй установочные субмеханизмы 8001 и 8002, один из которых расположен на верхней поверхности, а другой - на нижней поверхности, и каждый из них имеет соответствующий датчик 8101 или 8102.
На фиг.10 в одном случае, как показано, приспособление 802 установлено наверху стола через первый установочный субмеханизм 8001, а приспособление 804 установлено на нижней поверхности стола через второй установочный субмеханизм 8002. В другом варианте реализации одно или более приспособлений могут устанавливаться через любой из первого и второго установочных субмеханизмов 8001 и 8002. Используя установку спереди, сверху и/или снизу, как описано здесь, в добавление или в отличие от обычных подходов, можно обеспечить возможность быстрого монтажа и демонтажа приспособлений на стол и со стола 116 по существу в любом месте доступного для сканирования диапазона, требуя или не требуя от пациента изменения положения на столе 116. Это может сберечь время и улучшить в целом и/или создать более комфортные условия для пациента при добавлении и удалении приспособлений.
На фиг.11-16 представлены различные способы в соответствии с вышесказанным. Должно быть понятно, что порядок действий в описанных здесь способах не является ограничивающим. Поэтому здесь предполагаются и другие порядки. Кроме того, одно или более дополнительных действий могут быть опущены и/или одно или более дополнительных действий могут быть добавлены.
На фиг.11 представлен способ остановки движущегося стола в ответ на управляемое или неуправляемое отключение электропитания.
На этапе 1102 осуществляется мониторинг выделенной схемы аварийной остановки в системе формирования изображений. Неограничивающий пример такой схемы аварийной остановки описан в связи с E-stop схемой 140.
На этапе 1104, в ответ на обнаружение срабатывания схемы аварийной остановки, контроллер, приводящий в действие двигатель, который обеспечивает горизонтальное перемещение стола подставки в системе формирования изображений, отключается от приведения в действие двигателя.
На этапе 1106, далее в ответ на обнаружение срабатывания схемы аварийной остановки, обмотка двигателя, приводящего в движение стол, замыкается на нагрузку для устранения регенерированного электрического тока двигателя.
На этапе 1108, опционально, когда стол останавливается, стол устанавливается в свободное состояние.
Вышеизложенное обеспечивает возможность прекращения движения стола в соответствии с разными техническим требованиями. В качестве неограничивающего примера в одном случае это позволяет останавливать стол 116 в пределах 10 или 25 миллиметров и за полсекунды от момента срабатывания схемы аварийной остановки при массе пациента от 100 до 1000 кг (например, 135 кг, 450 кг, 500 кг и т.д.) и движении стола 116 при 800 мм/с2 или ниже (например, 450 мм/с2).
Опционально может быть использован физический тормоз двигателя, чтобы облегчить остановку движущегося стола. В этом случае тормоз может быть снят сразу же после того, как стол остановится, чтобы стол смог оказаться в свободном состоянии.
На фиг.12 представлен способ для смягчения горизонтального столкновения стола.
На этапе 1202 считывается положение стола через приводной двигатель стола.
На этапе 1204 получается ожидаемое положение стола.
На этапе 1206 получается заданный диапазон ошибок положения.
На этапе 1208 определяется разность между считанным и ожидаемым положениями стола.
На этапе 1210 эта разность сравнивается с диапазоном ошибок.
На этапе 1212, если разность соответствует (например, совпадает и/или превышает) диапазону ошибок, контроллер горизонтального привода, приводящий в действие двигатель, обеспечивающий перемещение стола, отключается от приведения в действие двигателя.
В противном случае контроллер продолжает приводить в действие двигатель, чтобы перемещать стол в соответствии с запланированным профилем движения.
На фиг.13 представлен способ смягчения вертикального столкновения подставки.
На этапе 1302 осуществляется мониторинг одного или более датчиков, которые расположены межу столом и полом, к которому прикреплено основание подставки.
На этапе 1304 принимается сигнал, генерируемый по меньшей мере одним из датчиков в ответ на физический контакт датчика с объектом, расположенным между столом и полом.
На этапе 1306, в ответ на этот сигнал, контроллер, приводящий в действие двигатель, обеспечивающий перемещение основания, отключается от приведения в действие двигателя.
На фиг.14 представлен способ обнаружения отключения горизонтального привода и прекращения перемещения стола в ответ на это за счет использования множества датчиков.
На этапе 1402 считывается первое положение стола, когда вал связан с двигателем через соединитель.
На этапе 1404 считывается второе положение стола, когда двигатель связан с валом через соединитель.
На этапе 1406 получается заданное пороговое значение ошибки положения.
На этапе 1408 определяется разность между первым и вторым положениями.
На этапе 1410 эта разность сравнивается с заданным пороговым значением.
На этапе 1412, если разность удовлетворяет заданному пороговому значению, контроллер горизонтального привода, приводящий в действие двигатель, обеспечивающий перемещение стола, отключается от приведения в действие двигателя.
В противном случае контроллер продолжает приводить в действие двигатель, чтобы перемещать стол в соответствии с запланированным профилем движения.
На фиг.15 представлен способ обнаружения отключения горизонтального привода и прекращения перемещения стола в ответ на это за счет использования одного датчика.
На этапе 1502 считывается электрический ток, текущий через двигатель, приводящий в движение стол.
На этапе 1504 получается заданное пороговое значение электрического тока.
На этапе 1506 считанный электрический ток сравнивается с пороговым значением.
На этапе 1508, если считанное значение тока соответствует заданному пороговому значению, контроллер горизонтального привода, приводящий в действие двигатель, обеспечивающий перемещение стола, отключается от приведения в действие двигателя.
В противном случае контроллер продолжает приводить в действие двигатель, чтобы перемещать стол в соответствии с заданным профилем движения.
На фиг.16 представлен способ обнаружения и/или определения прикрепления и/или удаления приспособления с подставки и/или определения границы столкновений для подставки на основе этого.
На этапе 1602 прикрепление приспособления к подставке определяется датчиком на подставке.
На этапе 1604 определяется тип прикрепленного к подставке приспособления.
На этапе 1606 определяется подходящая граница столкновений подставки на основе определенного типа прикрепленного к подставке приспособления. Как здесь описано, подходящая граница столкновений является такой, чтобы можно было исключить столкновение между приспособлением и системой.
На этапе 1608 определенная граница столкновений подставки используется для определения диапазонов перемещения по горизонтали и вертикали при движении подставки.
Хотя вышесказанное описано в контексте КТ системы, следует понимать, что это применимо также к другим видам формирования изображений, таким как МРТ, ПЭТ, рентгеноскопия, ультразвуковое исследование и т.п.
Должно быть понятно, что система 100 может быть выполнена таким образом, чтобы включать в себя один или более блоков 144 обнаружения аварийной остановки (E-stop), блоков 124 предотвращения вертикального столкновения, блоков 136 предотвращения горизонтального столкновения, блоков 138 обнаружения расцепления соединителя и/или других предотвращающих, запрещающих, отключающих и т.п. устройств. Кроме того, одно или более устройств могут быть частями одного и того же компонента, распределяться по компонентам и/или разноситься в разные компоненты, и поэтому использование термина "компонент" относится к одному или ко всем вышеупомянутым сочетаниям.
Изобретение описано здесь со ссылкой на различные варианты реализации. Модификации и изменения могут быть созданы другими лицами на основе представленного здесь описания. Подразумевается, что изобретение должно истолковываться как включающее в себя все такие модификации и изменения в той мере, в какой они входят в объем прилагаемых пунктов формулы изобретения или их эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВАЯ СИСТЕМА ДЛЯ ОКАЗАНИЯ ТЕХНИЧЕСКОЙ ПОМОЩИ НА ДОРОГЕ | 2014 |
|
RU2646765C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С УПРАВЛЕНИЕМ ДВИГАТЕЛЕМ НА ОСНОВЕ КОМПОНЕНТА ПРИВОДНОЙ СИСТЕМЫ | 2016 |
|
RU2732986C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2013 |
|
RU2598874C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С УПРАВЛЕНИЕМ ДВИГАТЕЛЕМ НА ОСНОВАНИИ ЭЛЕКТРИЧЕСКОГО ПАРАМЕТРА, СВЯЗАННОГО С ТОКОМ ДВИГАТЕЛЯ | 2016 |
|
RU2731410C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С УПРАВЛЕНИЕМ ДВИГАТЕЛЕМ НА ОСНОВАНИИ ПОКАЗАНИЙ ТЕМПЕРАТУРЫ | 2016 |
|
RU2714880C2 |
| АВТОНОМНЫЙ ПЫЛЕСОС | 2012 |
|
RU2586197C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С УПРАВЛЕНИЕМ ДВИГАТЕЛЕМ НА ОСНОВЕ ТОКОВОГО ЗЕРКАЛА | 2016 |
|
RU2727594C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С УПРАВЛЕНИЕМ ДВИГАТЕЛЕМ НА ОСНОВАНИИ ТОКА, ИЗМЕРЕННОГО ДАЛЬШЕ ПО ЦЕПИ | 2016 |
|
RU2731308C2 |
| БЕСПРОВОДНОЙ ЭЛЕКТРОПРИБОР | 2010 |
|
RU2523231C2 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ПОДЪЕМНОГО УСТРОЙСТВА И ПОДЪЕМНАЯ СИСТЕМА | 2007 |
|
RU2429185C2 |






Способ включает в себя прием сигнала, запрещающего перемещение подставки для субъекта обследования, указывающего по меньшей мере на одно из отключения электропитания системы формирования изображений, столкновения горизонтально перемещающегося стола системы формирования изображений, расцепления приводной системы горизонтального движения, выполненной с возможностью перемещения стола по горизонтали, или столкновения вертикально перемещающейся подставки в системе формирования изображений, когда приводная система вертикального движения осуществляет перемещение подставки по вертикали, и запрещение, в ответ на прием запрещающего перемещение подставки сигнала, по меньшей мере одного из горизонтального перемещения стола или вертикального перемещения подставки. 2 н. и 13 з.п. ф-лы, 16 ил. 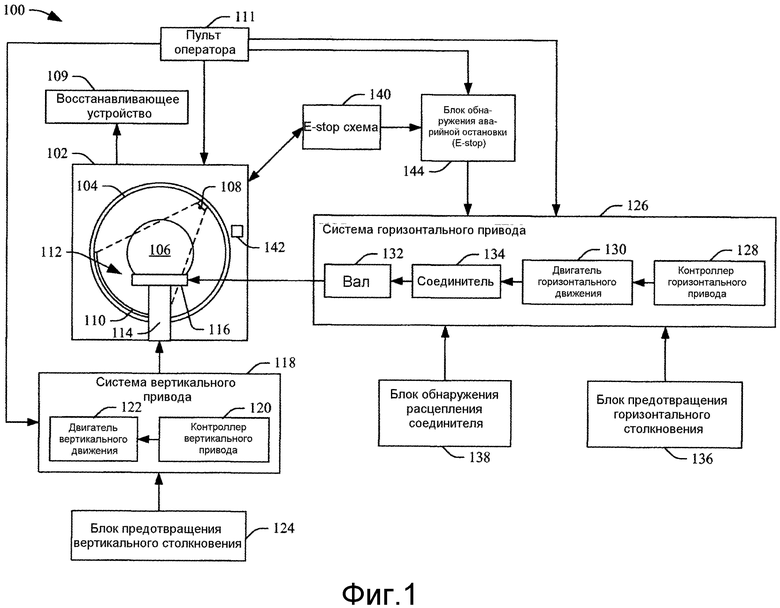
1. Способ управления перемещением подставки, применяемый в системе формирования изображений, содержащий этапы, на которых:
принимают запрещающий перемещение подставки сигнал, указывающий на по меньшей мере одно из отключения электропитания системы формирования изображений, столкновения горизонтально перемещающегося стола системы формирования изображений, расцепления приводной системы движения по горизонтали, выполненной с возможностью горизонтального перемещения стола, или столкновения вертикально перемещающейся подставки системы формирования изображений, причем приводная система движения по вертикали осуществляет вертикальное перемещение подставки; и
запрещают в ответ на прием запрещающего перемещение подставки сигнала по меньшей мере одно из горизонтального перемещения стола и вертикального перемещения подставки посредством отключения по меньшей мере одного из контроллера приводной системы движения по горизонтали и контроллера приводной системы движения по вертикали.
2. Способ по п. 1, в котором запрещающий перемещение сигнал является сигналом аварийной остановки от схемы аварийной остановки системы формирования изображений, указывающим на отключение электропитания, и который дополнительно содержит:
отключение, в ответ на прием запрещающего перемещение сигнала, контроллера приводной системы движения по горизонтали от приведения в действие двигателя приводной системы движения по горизонтали, приводящего в движение стол, причем этот контроллер выполнен с возможностью приведения в действие двигателя для перемещения стола в соответствии с профилем движения стола подставки; и
устранение, в ответ на прием запрещающего перемещение сигнала, регенерированного электрического тока из двигателя.
3. Способ по п. 2, в котором устранение регенерированного электрического тока из двигателя содержит электрическое замыкание обмотки двигателя на резистивную нагрузку.
4. Способ по п. 3, дополнительно содержащий:
активацию, в ответ на прием запрещающего перемещение сигнала, тормоза двигателя; и
снятие тормоза после того, как стол остановится, и тем самым перевод стола в свободное состояние, в котором стол может свободно перемещаться при прикладывании к столу внешней силы.
5. Способ по любому из пп. 2-4, в котором стол перемещается со скоростью от двухсот миллиметров в секунду до одной тысячи миллиметров в секунду и, в ответ на прием сигнала, движущийся стол останавливается после прохождения им расстояния в пределах двадцати пяти миллиметров за время в пределах половины секунды с момента отключения электропитания при нагрузке стола от ста килограмм до пятисот килограмм.
6. Способ по любому из пп. 2-4, в котором стол перемещается со скоростью от двухсот миллиметров в секунду до одной тысячи миллиметров в секунду и, в ответ на прием сигнала, движущийся стол останавливается после прохождения им расстояния в пределах десяти миллиметров за время в пределах половины секунды с момента отключения электропитания при нагрузке стола от ста килограмм до пятисот килограмм.
7. Способ по п. 1, дополнительно содержащий:
прием первого сигнала, указывающего горизонтальное положение стола в данный момент времени, причем первый сигнал воспринимается через датчик приводной системы движения по горизонтали;
прием второго сигнала, указывающего ожидаемое положение стола в данный момент времени, причем ожидаемое положение стола получается из профиля горизонтального движения подставки;
определение разностного сигнала положения, указывающего разность между первым и вторым сигналами;
получение заданного диапазона ошибок положения;
сравнение разностного сигнала с диапазоном ошибок; и
отключение, в ответ на разностный сигнал, выходящий за пределы диапазона ошибок, контроллера приводной системы движения по горизонтали от приведения в действие двигателя, позволяя тем самым движущемуся столу двигаться по инерции до остановки.
8. Способ по п. 1, дополнительно содержащий:
прием сигнала вертикального столкновения, указывающего на то, что датчик, прикрепленный к подставке между столом и полом, к которому прикреплена подставка, вошел в физический контакт с объектом, расположенным между столом и полом; и
отключение, в ответ на сигнал вертикального столкновения, выходящий за пределы диапазона ошибок, контроллера приводной системы движения по вертикали от приведения в действие двигателя и тем самым прекращение вертикального перемещения подставки.
9. Способ по п. 1, в котором система горизонтального привода включает в себя контроллер, который приводит в действие двигатель, прикрепленный к первому концу ведущего вала через соединитель, а второй конец ведущего вала подсоединен к столу, и который дополнительно содержит:
прием первого сигнала, указывающего горизонтальное положение стола в данный момент времени, причем этот первый сигнал воспринимается первым датчиком, считывающим положение у вала;
прием второго сигнала, указывающего горизонтальное положение стола в данный момент времени, причем этот второй сигнал воспринимается вторым датчиком, считывающим положение у двигателя;
определение разностного сигнала положения, указывающего разность между первым и вторым сигналами;
получение заданного порогового значения ошибки положения;
сравнение разностного сигнала положения с заданным пороговым значением ошибки положения; и
отключение, в ответ на соответствие или превышение разностным сигналом положения заданного порогового значения ошибки положения, контроллера приводной системы движения по горизонтали от приведения в действие двигателя, позволяя тем самым движущемуся столу двигаться по инерции до остановки.
10. Способ по п. 1, в котором система горизонтального привода включает в себя контроллер, который приводит в действие двигатель, подсоединенный к первому концу вала через соединитель, а другой конец вала подсоединен к столу, и который дополнительно содержит:
прием первого сигнала, указывающего электрический ток двигателя стола;
получение заданного порогового значения электрического тока;
сравнение первого сигнала с заданным пороговым значением электрического тока; и
отключение, в ответ на соответствие или превышение первым сигналом порогового значения электрического тока, контроллера приводной системы горизонтального движения от приведения в действие двигателя, вызывая тем самым движение по инерции до остановки движущегося стола.
11. Способ по п. 1, дополнительно содержащий
обнаружение физического прикрепления приспособления для подставки к подставке посредством датчика на подставке;
определение типа приспособления для подставки;
выполнение действия, основанного на определенном типе подставки.
12. Способ по п. 11, дополнительно содержащий:
определение границы столкновений подставки из множества границ столкновений подставки, основываясь на определенном типе подставки, причем каждая из множества границ столкновений определяет разные горизонтальное и вертикальное перемещения подставки; и
поддержание перемещения подставки в пределах определенной границы столкновений, когда подставка перемещается по горизонтали и/или вертикали, посредством закрепленного на подставке приспособления.
13. Способ по любому из пп. 1-4, в котором стол включает в себя электрически непроводящую поверхность или электрически заземлен, или электрически изолирован.
14. Способ по любому из пп. 1-4, в котором стол включает в себя по меньшей мере один механизм для установки приспособления для прикрепления удерживающего пациента приспособления к подставке таким образом, чтобы удерживающее пациента приспособление закреплялось на подставке и имело возможность передвижения вдоль длинной оси подставки.
15. Система формирования изображений, содержащая:
источник излучения (108), испускающий излучение, которое пересекает зону обследования;
детекторную матрицу (110), расположенную напротив источника излучения поперек зоны обследования, которая детектирует излучение, пересекающее зону обследования;
подставку (112), выполненную с возможностью расположения на ней объекта или субъекта, подлежащего сканированию, причем эта подставка включает в себя:
основание (114), выполненное с возможностью вертикального перемещения;
стол (116), выполненный с возможностью горизонтального перемещения, причем этот стол установлен по скользящей посадке на основании; и
компонент (144, 136, 124, 138), выполненный с возможностью запрещения по меньшей мере одного из горизонтального и вертикального перемещений подставки в ответ на заданное событие в системе формирования изображений, причем такое событие включает в себя одно или более из отключения электропитания системы формирования изображений, столкновения стола, расцепления приводной системы движения по горизонтали, выполненной с возможностью горизонтального перемещения стола, или столкновения вертикально перемещающейся подставки в системе формирования изображений, причем приводная система движения по вертикали осуществляет вертикальное перемещение подставки, посредством отключения по меньшей мере одного из контроллера приводной системы движения по горизонтали и контроллера приводной системы движения по вертикали.
| US 20090285364 A1, 19.11.2009 | |||
| US 20050129181 A1, 16.06.2005 | |||
| US 4131802 A1, 26.12.1978 | |||
| . |

