Изобретение относится к точной механике и измерительной технике и может быть использовано в научных исследованиях и промышленности в оборудовании для прецизионного линейного перемещения объектов, для измерения линейных размеров объектов, в системах автоматического управления элементами устройств и инструментов, в технологическом оборудовании при изготовлении прецизионных элементов, а также для юстировки оптических приборов.
Наиболее близким аналогом к предлагаемому является устройство для линейных перемещений с нанометровой точностью в большом диапазоне возможных перемещений, включающее опорную (неподвижную) часть и подвижную часть с установленным на ней объектом перемещения, привод, перемещающий подвижную часть, источник монохроматического излучения, формирующий точечный источник монохроматического излучения на выходе одномодового световода, точечный источник совмещен с передним фокусом оптической системы, формирующей параллельный пучок света, далее за оптической системой последовательно по ходу лучей размещены установленные перпендикулярно оси оптической системы и параллельно друг другу две прозрачные пластины, при этом одна из пластин (первая по ходу пучка) установлена на неподвижной части и по ее периметру на стороне, обращенной ко второй пластине, под углом примерно 120° друг к другу расположены три участка с наклонными к плоскости пластины поверхностями (участки наклонной поверхности), выполненные с перепадом высот, изменяющимся по направлению от центра первой пластины к ее краю на величину, равную как минимум половине длины волны монохроматического излучения, а другая пластина (вторая пластина по ходу пучка) закреплена на объекте, установленном на подвижной части, на участки обращенных друг к другу рабочих поверхностей пластин нанесены высокоотражающие покрытия, причем на рабочей поверхности первой пластины покрытия нанесены на три участка наклонных поверхностей, с нерабочей поверхностью второй пластины в ее периферийной части соединены три актюатора, далее по ходу пучка за второй пластиной установлен фотоприемный модуль, включающий три линейных многоэлементных фотоприемника, оптически сопряженные с участками наклонной поверхности первой пластины, выходы фотоприемников подключены ко входам компьютера, а выходы компьютера подключены к приводу, соединенному с подвижной частью, и трем актюаторам в [патент РФ №2502952].
Недостатком известного устройства является то, что оно работоспособно только при небольших углах наклона между пластинами, возникающих при перемещении одной из них, например, из-за несовершенства подвижной части или вибрационного фона. В известном устройстве наклон одной пластины относительно другой контролируется по сигналам с трех линейных многоэлементных фотоприемников, расположенных напротив участков наклонных поверхностей. Изменение расстояния между перемещаемой и неподвижной пластинами напротив одного из линейных многоэлементных фотоприемников на половину длины волны зондирующего излучения приводит к смещению интерференционных полос на данном фотоприемнике на период. Таким образом, можно оценить диапазон изменения углов наклона пластины, которые еще могут быть обнаружены и компенсированы устройством, величиной λ/2d, где λ - длина волны зондирующего излучения, d - диаметр окружности, на которой расположены линейные многоэлементные фотоприемники. При использовании излучения He-Ne лазера с длиной волны λ=632.8 нм и d=40 мм получаем допустимый диапазон изменения углов наклона пластины примерно ±4⋅10-6 радиан. Таким образом, если происходят отклонения пластины на большие значения углов наклона, например, из-за несовершенства подвижной части или вибрационного фона, то данное устройство перестает обеспечивать линейное перемещение объекта с надлежащей точностью.
Задачей, на решение которой направлено настоящее изобретение, является создание устройства для прецизионного линейного перемещения, позволяющее достигнуть следующий технический результат: повышение точности перемещения объекта в большом диапазоне расстояний за счет компенсации отклонений пластины при ее перемещении даже при значительных углах наклона.
Технический результат достигается тем, что в устройстве для линейного перемещения объекта с нанометровой точностью в большом диапазоне возможных перемещений, включающем опорную (неподвижную) часть и подвижную часть с установленным на ней объектом, привод, перемещающий подвижную часть, источник монохроматического излучения, формирующий точечный источник излучения, совмещенный с передним фокусом оптической системы, формирующей параллельный пучок света с оптической осью, параллельной направлению перемещения, за оптической системой последовательно по ходу лучей установлены перпендикулярно оси пучка и параллельно друг другу две прозрачные пластины с высокоотражающими покрытиями на рабочих поверхностях, обращенных друг к другу, одна из пластин закреплена на объекте, установленном на подвижной части, а другая пластина установлена на неподвижной части, в периферийной части пластины, закрепленной на объекте, с ее нерабочей поверхностью соединены три актюатора, за пластинами по ходу пучка расположен фотоприемный модуль, сигналы с которого поступают на вход компьютера, сигналы с выхода компьютера поступают на привод, соединенный с подвижной частью, и актюаторы, соединенные с пластиной, закрепленной на объекте, устройство дополнительно содержит объектив, в качестве фотоприемного модуля используется двумерный матричный фотоприемник, на объекте перемещения укреплена пластина, первая по ходу пучка, рабочая поверхность по крайней мере одной из пластин выполнена в виде криволинейной поверхности с перепадом высот, монотонно изменяющимся от центра пластины к ее краю и составляющим не менее половины длины волны зондирующего излучения.
Технический результат достигается также тем, что криволинейной выполнена рабочая поверхность пластины, первой по ходу пучка.
Технический результат достигается также тем, что криволинейная рабочая поверхность первой по ходу пучка пластины представляет собой сегмент сферической поверхности.
Технический результат достигается также тем, что точечный источник монохроматического излучения формируется источником монохроматического излучения, излучение которого введено в одномодовый световод, на выходе этого световода.
Технический результат достигается также тем, что в качестве актюатора используют пьезоэлектрический актюатор.
Сущность предлагаемого устройства для линейного перемещения объекта с нанометровой точностью в большом диапазоне возможных перемещений поясняется фиг. 1-2.
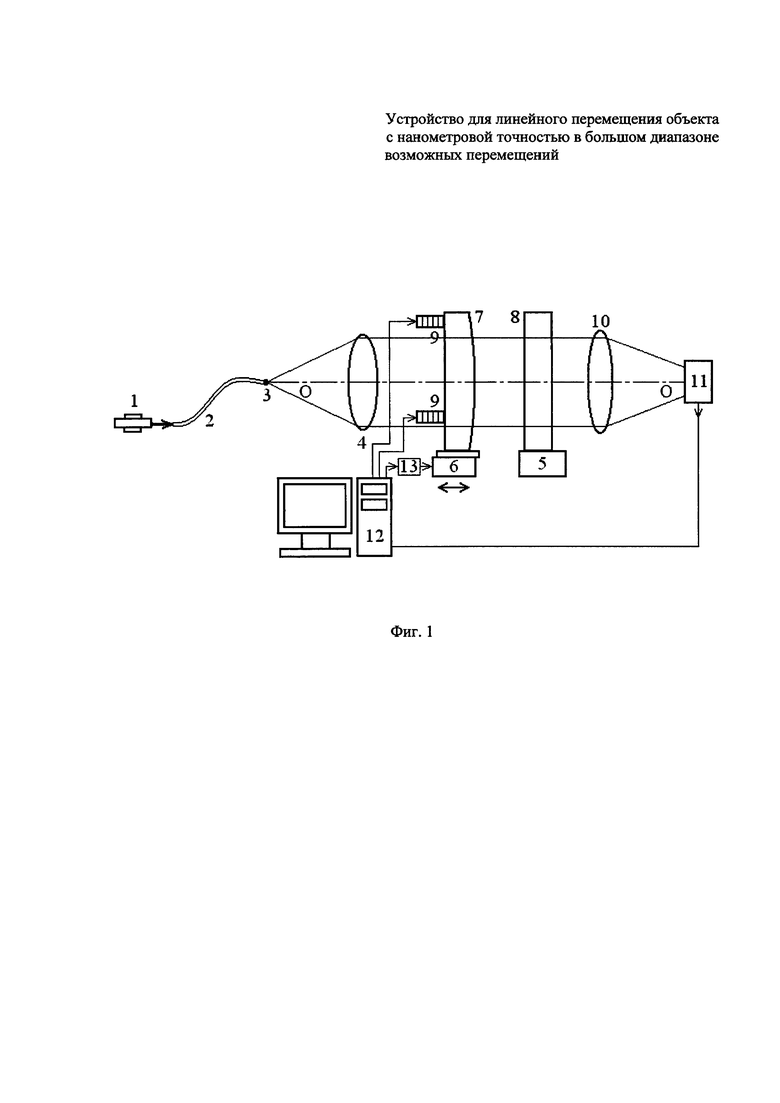
На фиг. 1 приведена принципиальная схема устройства, где 1 - источник монохроматического излучения, 2 - одномодовый световод, 3 - передний фокус оптической системы, 4 - оптическая система, формирующая параллельный пучок света, 5 - опорная (неподвижная) часть, 6 - подвижная часть, 7 - пластина, закрепленная на перемещаемом объекте, установленном на подвижной части 6, 8 - пластина, установленная на неподвижной части 5, 9 - актюаторы, 10 - объектив, 11 - матричный фотоприемник, 12 - компьютер, 13 - привод.
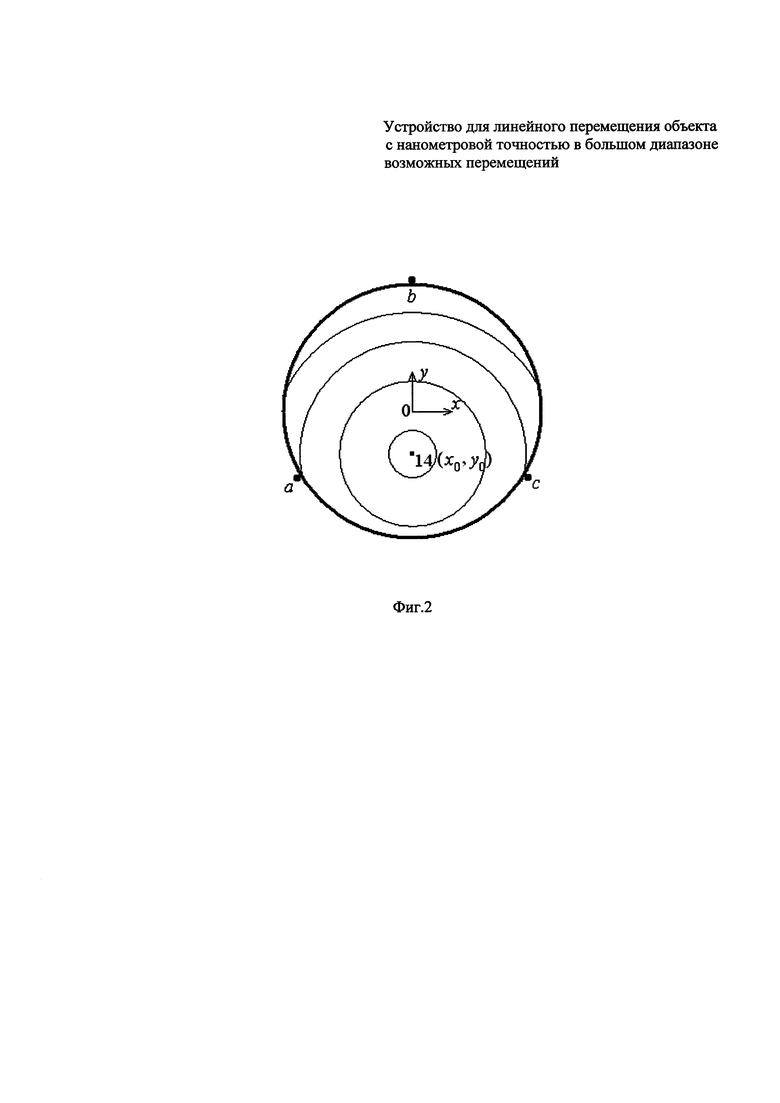
На фиг. 2 показаны концентрические интерференционные кольца, регистрируемые матричным фотоприемником 11, где а, b, с - положение актюаторов 9.
Устройство содержит источник монохроматического излучения 1, одномодовый световод 2, вход которого совмещен с выходом источника монохроматического излучения 1, а выход совмещен с передним фокусом 3 оптической системы 4, формирующей параллельный пучок света, неподвижную часть 5, подвижную часть 6. Далее за оптической системой 4 перпендикулярно оптической оси пучка и параллельно друг другу размещаются две прозрачные пластины 7 и 8 с высокоотражающими покрытиями на обращенных друг к другу рабочих поверхностях. Пластины 7 и 8 образуют интерферометр Фабри-Перо. Рабочая поверхность пластины 7 выполнена в виде криволинейной поверхности, например сферической формы, с перепадом высот, монотонно изменяющимся от центра пластины к ее краю и составляющим не менее половины длины волны зондирующего излучения, рабочая поверхность другой пластины плоская. К пластине 7 на стороне, противоположной к стороне, обращенной ко второй пластине 8, прикреплены три актюатора 9. За второй пластиной 8 перпендикулярно оптической оси установлены объектив 10 и матричный фотоприемник 11. Выходы компьютера 12 подключены к трем актюаторам 9, закрепленным на пластине 7, и к приводу 13, соединенному с подвижной частью 6.
Предлагаемое устройство работает следующим образом.
Источник монохроматического излучения 1 (например, лазер) создает на выходе одномодового световода 2 точечный источник 3 монохроматического излучения, совпадающий с передним фокусом 3 оптической системы 4, формирующей параллельный пучок света. Это излучение преобразуется оптической системой 4 в параллельный пучок необходимой апертуры, размер которой должен быть не менее размера пластин 7 и 8. Этот пучок подается на установленные перпендикулярно оси пучка и параллельно друг другу пластины 7 и 8, представляющие собой интерферометр Фабри-Перо. После прохождения пластин пучок попадает в объектив 10, апертура которого соответствует апертуре пучка. Объектив 10 формирует на матричном фотоприемнике 11 распределение интенсивности зондирующего излучения на рабочей поверхности пластины 8. Изображения, регистрируемые матричным фотоприемником 11, поступают в компьютер 12, где выполняется их обработка.
При строго плоскопараллельных рабочих поверхностях пластин 7 и 8 на матричном фотоприемнике 11 сформировалась бы интерферограмма со строго одинаковой по всей апертуре интенсивностью. Однако криволинейная форма рабочей поверхности пластины 7 создает дополнительные разности хода лучей, в результате чего на матричном фотоприемнике 11 формируется интерференционная картина в виде концентрических колец. Координаты центра данных концентрических колец определяются наклоном центральной области рабочей поверхности пластины 7 относительно рабочей поверхности пластины 8. В случае отсутствия наклона центр концентрических колец располагается на оси пучка.
Появление наклона у пластины 7 приводит к смещению центра концентрических колец, например, так, как это показано на фиг. 2. На фиг. 2 использованы следующие обозначения: 14 - центр концентрических колец, имеющий координаты (x0, y0), точки а, b и с показывают положения актюаторов, начало координат Оху находится на оптической оси. Компьютер 12 определяет координаты х0, y0 и генерирует соответствующие сигналы на актюаторы 9. В частном случае, когда угол между каждой парой актюаторов составляет 120°, сигналы, генерируемые компьютером 12, определяются следующими выражениями:
Sa=k(-x0cos30°-y0cos60°),
Sb=ky0,
Sc=k(x0cos30°-y0cos60°),
где Si - сигнал (напряжение) на актюаторе номер i (i=a, b, c), k - константа, которая определяется экспериментально. Константа к выбирается таким образом, чтобы подача напряжений Sa, Sb и Sc на актюаторы приводила к смещению точки (х0, y0) в начало координат.
Линейное перемещение пластины 7, расположенной на подвижной части 6, вдоль оптической оси приводит к изменению расстояния между пластинами 7 и 8. При этом изменение расстояния между пластинами 7 и 8 на половину длины волны монохроматического излучения источника 1 вызовет смещение интерференционной картины на матричном фотоприемнике 11 на один период (радиусы концентрических колец увеличатся или уменьшатся в зависимости от увеличения или уменьшения расстояния между пластинами 7 и 8 и выпуклости или вогнутости рабочей поверхности пластины 7). Положение центра концентрических интерференционных колец на оптической оси при изменении положения пластины 7 соответствует параллельному положению пластин 7 и 8 относительно друг друга и, следовательно, параллельному перемещению пластины 7 вдоль оптической оси.
Число концентрических колец, прошедших через каждую освещаемую точку матричного фотоприемника 11, соответствует числу целых значений полуволн, укладываемых на промежутке между пластинами 7 и 8, а точные значения радиусов колец характеризуют дробную часть числа полуволн, укладывающихся в промежутке между пластинами 7 и 8.
Компьютер 12 решает следующите задачи:
- формирование команды управления приводом 13, соединенным с подвижной частью 6 устройства, на перемещение объекта на заданное расстояние с заданной скоростью;
- определение наклона пластины 7 относительно пластины 8 путем нахождения центра концентрических интерференционных колец на матричном фотоприемнике 11;
- счет числа концентрических интерференционных колец, проходящих при перемещении объекта через каждую освещаемую точку матричного фотоприемника 11;
- определение дробной части порядка интерференции;
- суммирование числа интерференционных колец с дробной частью порядка интерференции и определение в каждый момент времени точного положения пластины 7 относительно пластины 8.
Путем сравнения реального и требуемого положений пластины 7 и определения ее наклона компьютер 12 вырабатывает команды на актюаторы 9 для управления положением и наклоном пластины 7.
Использование одномодового световода 2 на выходе источника монохроматического излучения 1 позволяет сформировать источник излучения 3 с линейными размерами менее 10 мкм. Благодаря этому телесный угол источника излучения (отношение линейного размера сформированного источника излучения 3 к фокусному расстоянию оптической системы 4) составляет ничтожно малую величину (порядка 10-5). В результате контраст интерференционной картины остается достаточным даже, например, при растоянии между пластинами 7 и 8, равном 1 м. Таким образом, величина перемещения объекта ограничена только возможностями перемещения подвижной части устройства 6.
В предлагаемом устройстве наклон пластины определяется по двумерной интерференционной картине, в этом случае наклон пластины может быть определен до того момента, пока эта интерференционная картина разрешается матричным фотоприемником 11. Интерференционная картина может быть разрешена матричным фотоприемником, если период интерференционной картины соответствует на приемнике размеру не менее двух пикселей. Период интерференционной картины соответствует изменению расстояния между пластинами 7 и 8 на половину длины волны. Таким образом, максимально допустимые углы наклона пластины составляют величину
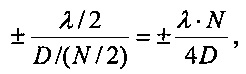
где D - диаметр участка пластины, изображение которого помещается на матричном фотоприемнике, N - число пикселей матричного фотоприемника вдоль одной координаты. При λ=632.8 нм, D=40 мм и N=1000 получаем максимально возможные для компенсации углы наклона перемещаемой пластины примерно ±4⋅10-3 радиан, что в 1000 раз больше допустимых углов наклона перемещаемой пластины у известного аналога (патент РФ №2502952).
Типичные значения чувствительности данного устройства линейного перемещения определяются следующими оценками. При перемещении пластины 7 относительно пластины 8 на половину длины волны (около 0,3 мкм при использовании излучения He-Ne лазера) смещение интерференционной картины осуществляется на полный период. Пусть матричный фотоприемник 11 имеет разрешение 1000×1000 пикселей, а перепад высот между центром и краем рабочей поверхности пластины 7 составляет 1 мкм, что приведет к появлению на фотоприемнике трех концентрических колец. В этом случае средняя разница диаметров соседних колец на матричном фотоприемнике составляет приблизительно 300 пикселей. При точности определения диаметров колец в 1 пиксель получаем чувствительность определения положения пластины 7 на уровне 1/300 от половины длины волны, или 1 нм.
Увеличение динамического диапазона с сохранением абсолютной точности достигается двумя факторами: во-первых, возможностью регистрации целого числа полуволн, укладывающихся в контролируемом промежутке, и дробного числа полуволн; во-вторых, использованием в качестве когерентного источника излучения, стабилизированного по частоте лазера. Например, стабильность частоты серийно выпускаемого стабилизированного по частоте лазера ЛГН-302 составляет Δν/ν=10-9. При использовании такого лазера ошибка в определении положений объекта, вызванная неточностью квантового эталона, не будет превышать одного нанометра при значениях промежутков между пластинами 7 и 8 до 1 метра включительно.
Оценим чувствительность устройства для линейного перемещения к наклонам пластины 7. Пусть световой диаметр пластин 7 и 8 равен 40 мм, перепад высот между центром и краем рабочей поверхности пластины 7 составляет 1 мкм, и матричный фотоприемник 11 имеет разрешение 1000×1000 пикселей. В этом случае смещение центра концентрических интерференционных колец на матричном фотоприемнике 11 на 1 пиксель соответствует наклону пластины 7 на угол 10-7 рад. Данная величина является оценкой чувствительности устройства линейного перемещения к наклонам пластины 7.
Максимальная скорость контролируемого перемещения подвижной части устройства 6 и, соответственно, пластины 7 определяется быстродействием (числом кадров в секунду) матричного фотоприемника 11. Для корректного подсчета числа концентрических интерференционных колец, проходящих при перемещении пластины 7 через каждую освещаемую точку матричного фотоприемника 11, требуется, чтобы за время получения одного кадра интерференционная картина в виде концентрических колец сдвигалась не более чем на полпериода. При использовании излучения He-Ne лазера с длиной волны 0,6328 мкм такое изменение интерференционной картины соответствует смещению пластины 7 на 0,1582 мкм. Пусть матричный фотоприемник обладает быстродействием 500 кадров/с. Тогда максимальная скорость устройства линейного перемещения составляет 0,1582×500≈79 мкм/с.
Таким образом, предлагаемое устройство для линейного перемещения обеспечивает перемещение подвижной части с пластиной в диапазоне вплоть до 1 м при максимальных углах отклонения пластины более 10-3 рад с линейной точностью до 1 нм и точностью сохранения углов наклона до 10-7 рад, при этом достигается максимальная скорость линейного перемещения более 50 мкм/с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ С НАНОМЕТРОВОЙ ТОЧНОСТЬЮ В БОЛЬШОМ ДИАПАЗОНЕ ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ | 2012 |
|
RU2502952C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПОЛОЖЕНИЯ ОБЪЕКТА НАНО- И СУБНАНОМЕТРОВОЙ ТОЧНОСТИ | 2012 |
|
RU2502951C1 |
| Интерферометр для измерения перемещений | 1980 |
|
SU934212A1 |
| СПОСОБ УДАЛЕННОГО КОНТРОЛЯ ФОРМЫ ПОВЕРХНОСТИ И ТОЛЩИНЫ ПОКРЫТИЙ, ПОЛУЧАЕМЫХ В ПРОЦЕССЕ МАГНЕТРОННОГО ВАКУУМНОГО НАПЫЛЕНИЯ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2549211C1 |
| Устройство для измерения перемещений объекта | 1987 |
|
SU1499113A1 |
| Интерференционное устройство для измерения перемещений | 1982 |
|
SU1054677A1 |
| ИНТЕРФЕРОМЕТР ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2146354C1 |
| Интерферометр для измерения перемещений объекта | 1981 |
|
SU983450A1 |
| Двухлучевой интерферометр для измерения перемещений объектов | 1981 |
|
SU1000746A1 |
| Устройство для измерения параметров перемещения объекта | 1985 |
|
SU1260685A1 |
Изобретение относится к точной механике и измерительной технике и может быть использовано в оборудовании для прецизионного линейного перемещения объектов. Заявленное устройство для линейного перемещения объекта с нанометровой точностью в большом диапазоне возможных перемещений включает опорную (неподвижную) часть и подвижную часть с установленным на ней объектом, привод, перемещающий подвижную часть Кроме того, заявленное устройство содержит источник монохроматического излучения, формирующий точечный источник излучения, совмещенный с передним фокусом оптической системы, формирующей параллельный пучок света с оптической осью, параллельной направлению перемещения. За оптической системой последовательно по ходу лучей установлены перпендикулярно оси пучка и параллельно друг другу две прозрачные пластины с высокоотражающими покрытиями на рабочих поверхностях, обращенных друг к другу, одна из пластин закреплена на объекте, установленном на подвижной части, а другая пластина установлена на неподвижной части, в периферийной части пластины, закрепленной на объекте, с ее нерабочей поверхностью соединены три актюатора. за пластинами по ходу пучка расположен фотоприемный модуль, сигналы с которого поступают на вход компьютера, сигналы с выхода компьютера поступают на привод, соединенный с подвижной частью, и актюаторы, соединенные с пластиной, закрепленной на объекте, устройство дополнительно содержит объектив, в качестве фотоприемного модуля используется двумерный матричный фотоприемник, на объекте перемещения укреплена пластина, первая по ходу пучка, рабочая поверхность по крайней мере одной из пластин выполнена в виде криволинейной поверхности с перепадом высот, монотонно изменяющимся от центра пластины к ее краю и составляющим не менее половины длины волны зондирующего излучения. Технический результат - повышение точности перемещения объекта в большом диапазоне расстояний. 4 з.п. ф-лы, 2 ил.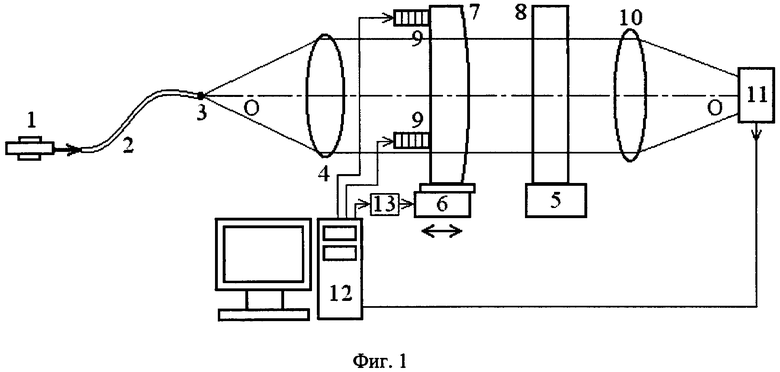
1. Устройство для линейного перемещения объекта с нанометровой точностью в большом диапазоне возможных перемещений, включающее опорную (неподвижную) часть и подвижную часть с установленным на ней объектом, привод, перемещающий подвижную часть, источник монохроматического излучения, формирующий точечный источник излучения, совмещенный с передним фокусом оптической системы, формирующей параллельный пучок света с оптической осью, параллельной направлению перемещения, за оптической системой последовательно по ходу лучей установлены перпендикулярно оси пучка и параллельно друг другу две прозрачные пластины с высокоотражающими покрытиями на рабочих поверхностях, обращенных друг к другу, одна из пластин жестко закреплена на объекте, установленном на подвижной части, а другая пластина установлена на неподвижной части, с нерабочей поверхностью пластины, закрепленной на объекте, в ее периферийной части соединены три актюатора, за пластинами по ходу пучка расположен фотоприемный модуль, сигналы с которого поступают на вход компьютера, сигналы с выхода компьютера поступают на привод, соединенный с подвижной частью, и актюаторы, соединенные с пластиной, закрепленной на объекте, отличающееся тем, что устройство дополнительно содержит объектив, в качестве фотоприемного модуля используется двумерный матричный фотоприемник, на объекте перемещения укреплена пластина, первая по ходу пучка, рабочая поверхность по крайней мере одной из пластин выполнена в виде криволинейной поверхности с перепадом высот, монотонно изменяющимся от центра пластины к ее краю и составляющим не менее половины длины волны зондирующего излучения.
2. Устройство по п. 1, отличающееся тем, что криволинейной выполнена рабочая поверхность пластины, первой по ходу пучка.
3. Устройство по п. 1, отличающееся тем, что криволинейная рабочая поверхность первой по ходу пучка пластины представляет собой сегмент сферической поверхности.
4. Устройство по п. 1, отличающееся тем, что точечный источник монохроматического излучения формируется источником монохроматического излучения, излучение которого введено в одномодовый световод, на выходе этого световода.
5. Устройство по п. 1, отличающееся тем, что в качестве актюатора используют пьезоэлектрический актюатор.
| УСТРОЙСТВО ДЛЯ ПРЕЦИЗИОННОГО ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2007 |
|
RU2348952C2 |
| Устройство для измерения линейных перемещений объектов | 1982 |
|
SU1037070A1 |
| Устройство для измерения перемещений | 1984 |
|
SU1215004A1 |
| US 20110170108 A1, 14.07.2011. | |||

