Уровень техники.
Для компенсации емкостных токов замыкания на землю в сетях 6-35 кВ используются настраиваемые дугогасящие реакторы (ДГР), включаемые в контур нулевой последовательности (КНП) сети. Емкостные токи компенсируют индуктивным током ДГР, при равенстве которых возникает явление резонанса, когда полное сопротивление КНП на промышленной частоте становится чисто активным, а ток в месте замыкания на землю уменьшается до уровня суммарных активных потерь в ДГР и отходящих кабельных линиях.
Известен способ настройки компенсации емкостных токов по переходной характеристике КНП сети [1], выбранный в качестве первого прототипа. В данном способе для получения переходной характеристики в КНП сети подают импульс опорного тока через сигнальную обмотку ДГР, а для выделения свободной составляющей переходного процесса используется осциллограмма напряжения, снимаемая с трансформатора напряжения секции или с сигнальной обмотки ДГР. Свободная составляющая КНП сети выделяется как разностный сигнал двух фрагментов контрольной осциллограммы, зафиксированной до и после действия импульса опорного тока. Собственная частота контура определяется с учетом декремента затухания свободного колебательного процесса. Оценка расстройки производится сравнением промышленной частоты с частотой свободных колебаний КНП, после чего формируется регулирующее воздействие на индуктивность ДГР.
Недостатки способа - зависимость регулирующего воздействия от колебаний частоты промышленной сети, величины и фазы напряжения в контуре нулевой последовательности в момент подачи импульса опорного тока, малая амплитуда переходного процесса возмущения и, как следствие, высокая погрешность определения собственной частоты КНП. Способ не учитывает амплитуду и фазу собственных колебаний КНП в момент подачи импульса опорного тока, что приводит к недопустимо высокой погрешности измерений, когда интервал измерений меньше времени затухания вынужденных колебаний. Кроме того, способ не позволяет выполнять измерения существенных параметров КНП, таких как емкость сети и индуктивность дугогасящего реактора, без дополнительных действий оперативного персонала. Эти недостатки ограничивают область применения рассмотренного способа.
Наиболее близким к предлагаемому изобретению является способ реализации управления настройкой дугогасящего реактора [2], в котором собственная частота КНП также определяется по переходной характеристике сети. Способ, применяемый в устройстве, предполагает задержку оцифрованного сигнала на целое число N полупериодов промышленной частоты, поступающего с аналого-цифрового преобразователя, и возбуждение колебаний в контуре нулевой последовательности. Для выделения свободной составляющей производится суммирование или вычитание текущего и задержанного оцифрованных сигналов при нечетном или четном числе N соответственно. После определения собственной частоты колебаний КНП формируется управляющее воздействие на ДГР через блок сопряжения, который приближает собственную частоту КНП к частоте сети.
Недостаток прототипа - при подаче импульса опорного тока не учитываются колебания частоты промышленной сети, которые вносят погрешность в работу суимматор-вычитателя, малая амплитуда переходного процесса возмущения, не учитывается амплитуда и фаза собственных колебаний КНП в момент подачи импульса опорного тока, что в целом приводит к значительной погрешности определения собственной частоты КНП при малых уровнях полезного сигнала, а также в случаях, когда интервал измерений меньше времени затухания вынужденных колебаний. Учитывая, что автоматика управления ДГР, работающая по принципам [1] и [2] по своей сути являются системами автоматического управления (САУ) с замкнутой обратной связью (ОС), где высокая погрешность определения собственной частоты КНП приводит в лучшем случае к неоптимальным (излишним) управляющим воздействиям на привод ДГР, а в худшем - потерей устойчивости САУ. Способ, реализованный в прототипе [2], также как и способ [1], не предусматривают измерение существенных параметров КНП, таких как емкость сети и индуктивность дугогасящего реактора, без дополнительных действий оперативного персонала.
Недостатки вышеуказанных прототипов вытекают из следующего: простое вычитание осциллограмм по способу [1] приводит к появлению разностного сигнала ошибки после операции вычитания двух участков кривой контрольного сигнала из-за неиспользования информации о периоде промышленной частоты. В отличие от способа настройки [1] способ, реализованный в устройстве [2], позволяет уменьшить погрешность вычисления собственной частоты колебаний КНП, однако на практике частота сети постоянно меняется в ограниченных пределах или «плывет» по заранее неизвестному закону в зависимости от типа генерирующего оборудования и характера нагрузки потребителей. Этот факт указывает на то, что длительность полупериода промышленной частоты, представленная в М тактах фиксированной частоты дискретизации, имеет в худшем случае погрешность, равную периоду дискретизации устройства Td, что приводит к появлению разностного сигнала ошибки после операции вычитания с четным числом N (или суммирования с нечетным N). Таким образом, при использовании элемента задержки реализованного как
в сумматоре-вычитателе устройства [2] возникает неустранимая методическая ошибка, пропорциональная периоду дискретизации, умноженному на N. Так, если использовать линию задержки на 20 полупериодов промышленной частоты 50 Гц и Td=1/9600, то погрешность совмещения прямого сигнала и задержанной копии составит Тош=20/9600=2,1 мс, что может повлечь некорректную работу автоматики. (2,1 мс ?)
Известно, что при подаче импульса опорного тока в КНП возникает возмущение пропорционально прикладываемой мощности к обмотке ДГР. Для получения максимально точного результата измерений полезный сигнал возмущения должен значительно превышать уровень помех, обусловленных наведенными напряжениями в кабеле и собственными шумами сети. Так как конструктивно сигнальная обмотка выполнена достаточно тонким проводом (1,5-2 мм), то увеличение мощности опорного тока, с одной стороны, повышает требования к источнику наложения опорного тока, а с другой - может привести к повреждению сигнальной обмотки. На практике однократная подача импульса в сигнальную обмотку не позволяет получить отклик достаточной амплитуды в канале измерения тока из-за того, что мощность импульса сравнима с мощностью потерь в ДГР, а также потерь в элементах разветвленной сети. При этом переходная характеристика напряжения, снятая с сигнальной обмотки или трансформатора напряжения секции, не позволяет определить все ключевые параметры КНП. Ситуацию значительно усугубляет параллельное включение нескольких ДГР, где для корректной работы автоматики мощность импульса опорного тока должна быть увеличена пропорционально количеству установленных ДГР в сети. Учитывая ограничения по току для сигнальных обмоток ДГР, на сегодня, данный вопрос технически остается не разрешенным.
Дополнительные параметры КНП, такие как текущая индуктивность реактора (индуктивный ток реактора) и текущая емкость сети (емкостной ток сети) представляют особый интерес для оперативного персонала электрических станций, так как должны постоянно фиксироваться в рабочих журналах. Автоматические методы измерений таких параметров не представлены в прототипах и на сегодняшний день не известны.
Техническим результатом предлагаемого изобретения является повышение точности настройки и достоверности результата измерения.
Указанная цель достигается тем, что способ настройки режима компенсации емкостных токов на землю в электрических сетях, заключающийся в том, что формируют опорный ток в контуре нулевой последовательности, контролируют напряжение нулевой последовательности, ток реактора, частоту промышленной сети, отличается тем, что для возбуждения затухающих колебаний в контуре нулевой последовательности применяют опорный ток в виде серии импульсов чередующейся полярности с периодом следования в серии, близким или равным периоду собственных колебаний контура, оцифровывают входные аналоговые значения напряжения несимметрии и тока реактора, используя расчетное значение частоты дискретизации Fd, свободную составляющую получают методом вычитания входного и задержанного на время Т сигнала с учетом изменений промышленной частоты на интервале Т, определяют собственную частоту колебаний контура нулевой последовательности, сравнивают с частотой промышленной сети, находят значение расстройки и при выходе ее значения за пределы, заданные уставками, воздействуют на изменение индуктивного тока ДГР. При этом значение частоты дискретизации Fd выбирают на каждом шаге из условия, что ее отношение к частоте промышленной сети должно соответствовать целому значению N, а для возбуждения затухающих колебаний в контуре нулевой последовательности применяют одну или несколько серий импульсов, следующих друг за другом с периодом Т. Одновременно с этим управление скоростью изменения индуктивного тока ДГР производят пропорционально величине расстройки компенсации.
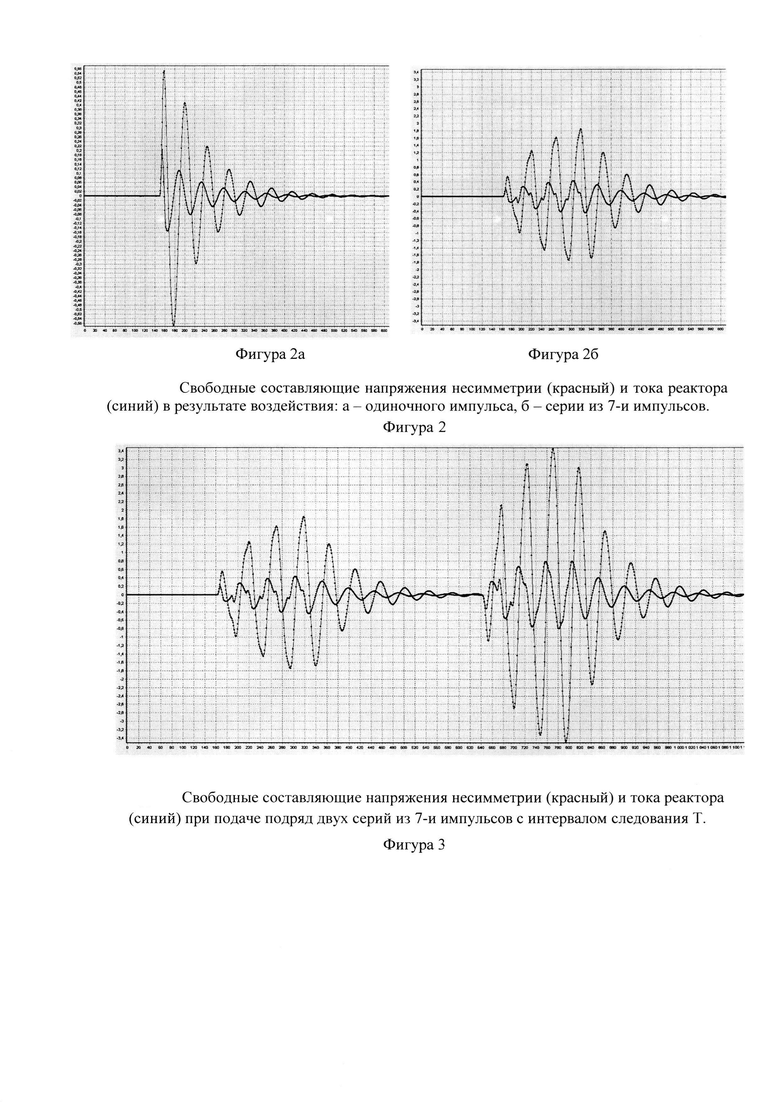
Суть способа настройки режима компенсации емкостных токов в электрических сетях заключается в том, что для получения разностных сигналов напряжения на нейтрали и тока реактора в сигнальную обмотку подается серия из нескольких импульсов разной полярности, частота следования которых внутри серии, близка или равна собственной частоте КНП сети. В своей основе способ использует эффект «накачки», когда накопление энергии в резонансном контуре происходит путем многократного внешнего воздействия с частотой, близкой или равной собственной частоте контура. При этом энергия очередного импульса, прикладываемая к контуру синфазно частоте собственных колебаний, будет увеличивать суммарную энергию контура до тех пор, пока энергия потерь в КНП не сравняется с энергией, получаемой КНП извне. На практике достаточно 5-8 импульсов для получения не зашумленных контрольных сигналов. В результате действия указанного эффекта, происходит усиление контрольных сигналов напряжения и тока реактора пропорционально добротности КНП. Так, на практике, при добротности контура Q=4,8 и использовании 7 импульсов в серии получен эффект усиления контрольных сигналов более чем в 3 раза (см. фиг. 2А и 2Б) по отношению к одиночному импульсу. Кроме того, при последовательном наложении 2-х взаимообратных серий импульсов с интервалом следования, равным времени задержки Т, на выходе фильтра можно получить дополнительное удвоение сигнала (см. фиг. 3).
При выделении собственной частоты колебаний КНП используется способ адаптивной фильтрации, суть которого заключается в том, что период дискретизации аналоговых величин Td и величина задержки адаптивного фильтра Т, равная целому значению периодов промышленной частоты, зависят от текущей частоты промышленной сети. Так, при отсутствии возмущения и наличии напряжения смещения нейтрали с некоторой амплитудой и фазой разностный сигнал на выходе фильтра должен быть равен нулю, в противном случае должен расцениваться как сигнал помехи. При плавном уменьшении частоты сети период дискретизации Td получит положительное приращение, пропорциональное уменьшению частоты сети, устраняя тем самым нарастающий фазовый сдвиг прямого и задержанного сигналов. Аналогично, при увеличении частоты сети период дискретизации Td получит отрицательное приращение, устраняя нарастающий отрицательный фазовый сдвиг прямого и задержанного сигналов. Дополнительно заявляемый способ позволяет рассчитывать индуктивность реактора и емкость сети непосредственно в каждом цикле измерения собственной частоты КНП. Текущая индуктивность ДГР рассчитывается как отношение действующих значений напряжения на реакторе к току реактора за интервал времени, кратный периоду собственных колебаний и умноженному на круговую частоту собственных колебаний КНП.

где Lдгр - текущая индуктивность реактора;
3Uo - действующее напряжение КНП;
Iдгр - действующий ток ДГР;
ωc - круговая частота собственных колебаний.
Емкость сети находится по известной формуле исходя из равенства реактивных сопротивлений КНП на частоте резонанса  Отсюда емкость сети находится как
Отсюда емкость сети находится как 
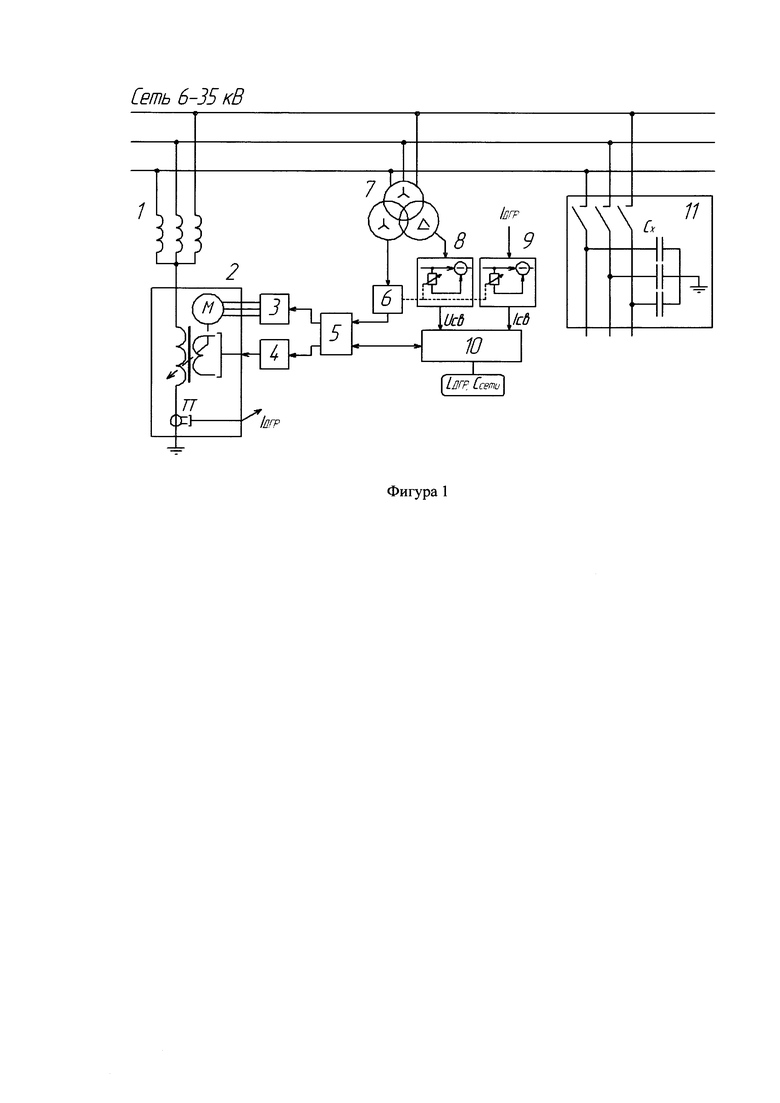
Для пояснения принципа действия способа на фиг. 1 приведена одна из возможных функциональных схем устройства, использующего предлагаемый способ. Схема содержит электрическую сеть с изолированной нейтралью напряжением 6-35 кВ с коммутируемыми электрическими линиями и их фазными емкостями 11, нейтралеобразующий трансформатор 1, дугогасящий реактор 2, с блоком управления привода 3, формирователь биполярных импульсов 4, который подключен к сигнальной обмотке ДГР, блок управления режимом компенсации 5, в котором по сигналу рассогласования формируется соответствующее управляющее воздействие на блок управления приводом 3 плунжера реактора 2, измеритель частоты сети 6, подключенный к измерительному трансформатору напряжения 7. Измерительный трансформатор напряжения 7 имеет вторичные обмотки типа «разомкнутый треугольник» и «звезда». Свободные составляющие переходных процессов каналов напряжения 3U0 и тока Iдгр выделяется в адаптивных фильтрах 8 и 9, выходные сигналы которых поступают на параметрический вычислитель 10, где вычисляются основные параметры КНП: собственная частота сети, добротность сети, декремент затухания, индуктивность реактора и емкость сети.
Устройство работает следующим образом. В нормальном режиме работы сети, когда отсутствуют какие-либо возмущающие факторы сигналы на выходах адаптивных фильтров 8 и 9 отсутствуют, при этом измеритель частоты сети 6 отслеживает изменения частоты промышленной частоты, корректирует время задержки адаптивных фильтров и частоту дискретизации, уменьшая, таким образом, сигналы ошибки фильтров. В соответствии с алгоритмом блок управления режимом компенсации 5 через формирователь импульсов 4 подает серию коротких импульсов тока разной полярности в сигнальную обмотку ДГР и одновременно с этим запускает параметрический вычислитель 10. При этом период следования импульсов внутри серии выбирается равным периоду собственных колебаний КНП. Количество импульсов в серии выбирается исходя из добротности сети и может быть от 1-3 для сетей с высокой добротностью до 10-и в сетях с низкой добротностью. При первом включении устройства, когда собственная частота контура не известна, используется одиночный импульс опорного тока, при этом определяется только собственная частота КНП, далее все последующие воздействия на сигнальную обмотку выполняются сериями импульсов с последующим уточнением собственной частоты и расчетом всех параметров КНП сети. Блок управления режимом компенсации 5 сравнивает частоту свободных колебаний КНП с промышленной частотой и по результатам сравнения формирует управляющее воздействие через блок управления приводом 3, который увеличивает или уменьшает индуктивность реактора 2. Выходной величиной параметрического вычислителя является текущая величина коэффициента расстройки КНП сети, добротность контура, коэффициент затухания, индуктивность реактора и емкость сети. Расстройка контура нулевой последовательности вычисляется по формуле
где f0 - собственная частота контура; fc - частота промышленной сети.
Высокая точность измерений и настройки в данном способе достигается за счет:
- увеличения амплитуды полезного сигнала посредством синфазного способа подачи импульсов «накачки» в контур сети;
- уменьшения погрешности измерений путем коррекции частоты дискретизации и времени задержки Т в зависимости от текущей частоты сети, что обеспечивает стационарность процесса измерений не зависимо от амплитуды и фазы напряжения несимметрии в КНП.
Дополнительно, способ настройки обеспечивает вычисление индуктивности реактора и емкости сети в каждом цикле измерения, что позволяет расширить область применения способа настройки режима компенсации емкостных токов в электрических сетях, например, в качестве способа измерения и мониторинга параметров распределительных электрических сетей.
Проведенные испытания доказали работоспособность заявляемого способа, а также достижение заявляемого результата: повышение точности настройки и достоверности результата измерения.
Литература
1. Патент на изобретение №2475915. Способ настройки компенсации емкостных токов замыкания на землю в электрических сетях. Ильин В.Ф., Петров М.И., Соловьев И.В. Опубликовано в Бюл. №5 20.02.2013 г.
2. Патент на полезную модель №147273. Устройство управления настройкой дугогасящего реактора. Березкин Е.Д., Марченко Г.Н. Опубликовано в Бюл. №30 27.10.2014 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ выделения свободной составляющей в контуре нулевой последовательности электрической сети и устройство автоматической настройки дугогасящего реактора на его основе | 2015 |
|
RU2621670C1 |
| Устройство наложения контрольного тока | 2015 |
|
RU2606373C1 |
| Способ измерения эквивалентной емкости сети и устройство для его осуществления | 2016 |
|
RU2667313C2 |
| СПОСОБ НАСТРОЙКИ КОМПЕНСАЦИИ ЕМКОСТНЫХ ТОКОВ ЗАМЫКАНИЯ НА ЗЕМЛЮ В ЭЛЕКТРИЧЕСКИХ СЕТЯХ | 2006 |
|
RU2321132C1 |
| СПОСОБ НАСТРОЙКИ КОМПЕНСАЦИИ ЕМКОСТНЫХ ТОКОВ ЗАМЫКАНИЯ НА ЗЕМЛЮ В ЭЛЕКТРИЧЕСКИХ СЕТЯХ | 2006 |
|
RU2475915C2 |
| СПОСОБ НАСТРОЙКИ КОМПЕНСАЦИИ ЕМКОСТНЫХ ТОКОВ ЗАМЫКАНИЯ НА ЗЕМЛЮ (ВАРИАНТЫ) | 2009 |
|
RU2402132C1 |
| Способ и устройство измерения емкостного тока электрической сети с плавнорегулируемым дугогасящим реактором | 2019 |
|
RU2723898C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ НАСТРОЙКИ ДУГОГАСЯЩЕГО РЕАКТОРА | 2009 |
|
RU2404501C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ЕМКОСТНЫХ ТОКОВ С СИММЕТРИРОВАНИЕМ ФАЗНЫХ НАПРЯЖЕНИЙ СЕТИ | 2018 |
|
RU2719632C1 |
| Способ настройки компенсации емкостных токов замыкания на землю в электрических сетях | 2016 |
|
RU2644582C1 |
Использование: в области электротехники. Технический результат - повышение точности настройки дугогасящих реакторов (ДГР), достоверности результата измерений и расширение области применения. Согласно способу для формирования возмущений в контуре нулевой последовательности (КНП) используют серию импульсов чередующейся полярности с периодом следования в серии, близким или равным периоду собственных колебаний контура. Оцифровывают входные аналоговые значения напряжения несимметрии и тока реактора, используя расчетное значение частоты дискретизации Fd, свободную составляющую получают методом вычитания входного и задержанного на время Т сигнала с учетом изменений промышленной частоты на интервале Т. Определяют собственную частоту колебаний контура нулевой последовательности, сравнивают с частотой промышленной сети, находят значение расстройки и при выходе ее значения за пределы, заданные уставками, воздействуют на изменение индуктивного тока ДГР. 3 з.п. ф-лы, 4 ил.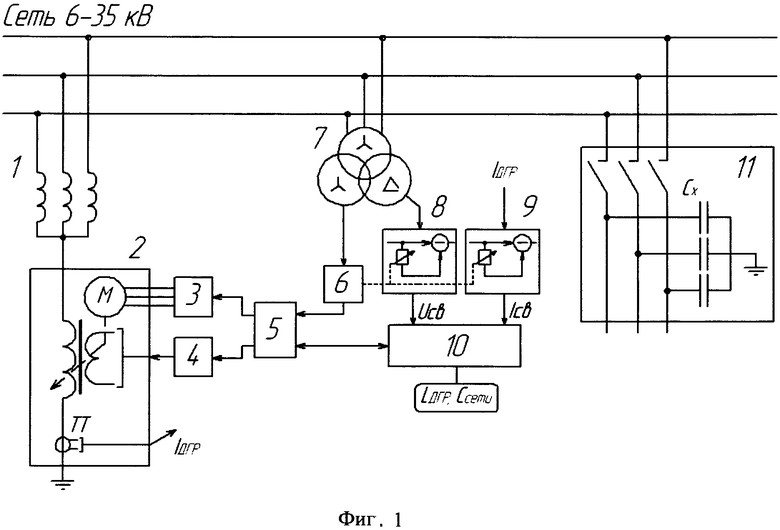
1. Способ настройки режима компенсации емкостных токов на землю в электрических сетях, заключающийся в том, что формируют опорный ток в контуре нулевой последовательности, контролируют напряжение нулевой последовательности, ток реактора, частоту промышленной сети, отличающийся тем, что для возбуждения затухающих колебаний в контуре нулевой последовательности применяют опорный ток в виде серии импульсов чередующейся полярности с периодом следования в серии, близким или равным периоду собственных колебаний контура, оцифровывают входные аналоговые значения напряжения несимметрии и тока реактора, используя расчетное значение частоты дискретизации Fd, свободную составляющую получают методом вычитания входного и задержанного на время Т сигнала с учетом изменений промышленной частоты на интервале Т, определяют собственную частоту колебаний контура нулевой последовательности, сравнивают с частотой промышленной сети, находят значение расстройки и при выходе ее значения за пределы, заданные уставками, воздействуют на изменение индуктивного тока дугогасящего реактора (ДГР).
2. Способ настройки по п. 1, отличающийся тем, что значение частоты дискретизации Fd выбирают на каждом шаге из условия, что ее отношение к частоте промышленной сети должно соответствовать целому значению N.
3. Способ настройки по п. 1, отличающийся тем, что для возбуждения затухающих колебаний в контуре нулевой последовательности применяют одну или несколько серий импульсов, следующих друг за другом с периодом Т.
4. Способ настройки по п. 1, отличающийся тем, что управление скоростью изменения индуктивного тока ДГР производят пропорционально величине расстройки компенсации.
| Внутренний центратор для сварки поворотных стыков труб | 1961 |
|
SU147273A1 |
| СПОСОБ НАСТРОЙКИ КОМПЕНСАЦИИ ЕМКОСТНЫХ ТОКОВ ЗАМЫКАНИЯ НА ЗЕМЛЮ В ЭЛЕКТРИЧЕСКИХ СЕТЯХ | 2006 |
|
RU2475915C2 |
| WO 200708263A1, 26.07.2007 | |||
| Многодекадное пересчетное устройство | 1972 |
|
SU446951A1 |

