Изобретение относится к области электротехники и может быть использовано для автоматической настройки компенсации емкостных токов замыкания на землю в электрических сетях с компенсированной нейтралью. Технический результат заключается в повышении точности настройки в условиях помех и низкого уровня полезного сигнала во всем диапазоне регулирования.
Известно, что свободная составляющая переходного процесса содержит полную информацию о параметрах электрической сети и используется для получения данных о собственной частоте колебаний, степени расстройки, емкости сети, добротности и других параметров контура нулевой последовательности (КНП) и применяется в устройствах настройки и компенсации емкостных токов замыкания на землю. Свободная составляющая, выделенная из переходного процесса, как правило, является источником данных для известных алгоритмов математической обработки сигналов во временной области. Способ выделения свободной составляющей в КНП электрической сети может применяться в устройствах, работающих в сетях с пониженной добротностью КНП, с параллельным включением нескольких реакторов, с комбинированным режимом заземления, где системы компенсации на основе других методов автоматической настройки и регулирования малоэффективны.
Уровень техники
Для компенсации емкостных токов замыкания на землю в сетях 6-35 кВ используются настраиваемые дугогасящие реакторы (ДГР), включаемые в контур нулевой последовательности сети. Емкостные токи компенсируют индуктивным током ДГР подключенным к сети через нейтралеобразующий трансформатор. При точной настройке ДГР ток в месте замыкания на землю приобретает чисто активный характер и уменьшается до уровня суммарных активных потерь в ДГР и отходящих кабельных линиях, что значительно снижает вероятность перехода ОЗЗ в междуфазные короткие замыкания с дальнейшим повреждением первичного оборудования.
Для получения информации о текущей расстройке КНП применяются способы на основе измерения амплитудно-фазовых характеристик, наложения контрольного тока отличного от частоты сети и переходной характеристики КНП. Известно, что переходная характеристика контура нулевой последовательности кроме расстройки содержит наиболее полную информацию о сети, включая такие параметры как, частота собственных колебаний, индуктивность реактора, суммарная емкость и добротность КНП. Для получения переходной характеристики в составе устройств измерения и компенсации емкостных токов ОЗЗ дополнительно используется блок наложения, который создает кратковременное возмущение в нейтрали промышленной сети, либо используются естественные возмущения, которые возникают вследствие коммутаций отходящих линий.
Известен способ настройки компенсации емкостных токов по переходной характеристики КНП сети [1], выбранный в качестве первого прототипа. В данном способе для получения свободной составляющей КНП сети используется осциллограмма напряжения, снимаемая с трансформатора напряжения секции или с сигнальной обмотки ДГР. Свободная составляющая КНП сети выделяется как разностный сигнал двух фрагментов контрольной осциллограммы, зафиксированной до и после действия импульса опорного тока. Оценка расстройки производится путем сравнения промышленной частоты с частотой свободных колебаний КНП, после чего формируется регулирующее воздействие на индуктивность ДГР.
Недостатки способа - зависимость регулирующего воздействия от колебаний частоты промышленной сети, величины и фазы напряжения в контуре нулевой последовательности в момент подачи импульса опорного тока, малая амплитуда переходного процесса возмущения, низкая помехоустойчивость и, как следствие, высокая погрешность определения собственной частоты КНП. Эти недостатки ограничивают область применения рассмотренного способа.
Наиболее близким к предлагаемому изобретению является способ выделения свободной составляющей в устройстве управления настройкой ДГР [2]. Способ, применяемый в устройстве, предполагает получение оцифрованного сигнала возмущения и его задержку на целое число N полупериодов промышленной частоты, где для выделения свободной составляющей производится суммирование или вычитание текущего и задержанного оцифрованных сигналов при нечетном или четном числе N соответственно. После определения собственной частоты колебаний КНП формируется управляющее воздействие на ДГР через блок сопряжения, который приближает собственную частоту КНП к частоте сети.
Недостаток прототипа - в соответствии с описанием [2] суммирование прямого и задержанного фрагментов входного сигнала (для нечетного N) приводит к удвоению постоянной составляющей, которая возникает вследствие несимметрии аналоговых цепей, не учитываются колебания частоты промышленной сети, которые вносят погрешность в работу сумматора-вычитателя, малая амплитуда переходного процесса возмущения, что в целом приводит к невозможности или значительной погрешности определения собственной частоты КНП при малых уровнях полезного сигнала.
Недостатки вышеуказанных прототипов вытекают из следующего: простое вычитание осциллограмм по способу [1] двух участков кривой контрольного сигнала приводит к появлению значительного сигнала ошибки или шума из-за неиспользования информации о периоде промышленной частоты. Способ, реализованный в устройстве [2], позволяет уменьшить погрешность получения свободной составляющей КНП, однако на практике ошибка остается существенной, так как частота сети постоянно меняется в ограниченных пределах или «плывет» по заранее неизвестному закону в зависимости от типа генерирующего оборудования и характере нагрузки потребителей.
Длительность полупериода промышленной частоты, представленная в М тактах фиксированной частоты дискретизации, имеет погрешность равную периоду дискретизации устройства Td и без ее подстройки приводит к появлению разностного сигнала ошибки после операции вычитания с четным числом N (или суммирования с нечетным N). Величина ошибки будет зависеть от соотношения амплитуд комплексного сигнала 3U0 (снимаемого с «разомкнутого треугольника» измерительного трансформатора) и свободной составляющей КНП на входе алгоритма. Таким образом, при использовании элемента задержки, реализованного как
в сумматоре-вычитателе устройства [2] возникает неустранимая методическая ошибка, пропорциональная периоду дискретизации умноженному на N.
Известно, что при подаче импульса опорного тока в КНП возникает возмущение пропорционально прикладываемой мощности к обмотке ДГР. Для получения максимально точного результата измерений полезный сигнал возмущения должен значительно превышать уровень помех, обусловленных наведенными напряжениями в кабеле и собственными шумами сети. Так как конструктивно сигнальная обмотка выполнена достаточно тонким проводом (1,5-2 мм), то увеличение мощности опорного тока, с одной стороны, повышает требования к источнику наложения опорного тока, а с другой, может привести к повреждению сигнальной обмотки. На практике однократная подача импульса в сигнальную обмотку не позволяет получить отклик достаточной амплитуды в канале измерения тока из-за того, что мощность импульса сравнима с мощностью потерь в ДГР, а также потерях в элементах разветвленной сети. При этом переходная характеристика напряжения, снятая с сигнальной обмотки или трансформатора напряжения секции, не позволяет определить все ключевые параметры КНП. Ситуацию значительно усугубляет параллельное включение нескольких ДГР, где для корректной работы автоматики мощность импульса опорного тока должна быть увеличена пропорционально количеству установленных ДГР в сети. С другой стороны, наложение измерительных импульсов большой мощности может вызвать нестабильную работу оборудования РЗА или привести к возникновению "качаний" сети.
Техническим результатом предлагаемого изобретения является повышение точности настройки и достоверности результатов измерений во всем диапазоне регулирования ДГР.
Указанная цель достигается тем, что формируют опорный ток в контуре нулевой последовательности, контролируют напряжение нулевой последовательности, частоту промышленной сети, при этом способ отличается тем, что для выделения свободной составляющей обработка сигнала возмущения производится в несколько этапов в сумматоре-накопителе таким образом, что свободная составляющая комплексного сигнала возмущения складывается со своей задержанной копией в фазе, а сложение сигнала несимметрии со своей задержанной копией производится в противофазе, при этом время задержки Т должно быть равно целому количеству периодов N промышленной частоты. При этом суммирование противофазных сигналов эквивалентно вычитанию амплитуд, а вычитание двух противофазных сигналов эквивалентно сложению амплитуд.
Для возбуждения затухающих колебаний в контуре нулевой последовательности применяют несколько серий из одного или нескольких импульсов чередующейся полярности с периодом следования импульсов внутри серии близким или равным периоду собственных колебаний контура Тсв, с периодом следования серий, равным времени линии задержки Т. При этом входные аналоговые значения напряжения несимметрии оцифровывают, используя расчетное значение частоты дискретизации Fd, значение которой выбирают на каждом шаге из условия, что ее отношение к частоте промышленной сети должно соответствовать целому значению N.
Известно, что комплексный сигнал возмущения представляет собой сумму свободной составляющей КНП и сигнала помехи, который в ограниченном интервале времени представляет собой стационарный процесс. Суть способа заключается в том, что для получения свободной составляющей используется статистическая взаимосвязь между двумя и более сигналами возмущения, сдвинутыми во времени при условии колебательного характера отклика и стационарности процессов на заданном интервале времени. Известно, что корреляционная функция для двух и более одинаковых возмущений, разнесенных на время Т, будет иметь максимум на интервале τ=Т, где Т - интервал возмущений.
Одновременно с этим при колебательном характере отклика функция будет иметь минимумы при τ=T±2/Fc, где Fc - собственная частота контура. Таким образом, для выделения полезного сигнала (в данном случае свободной составляющей КНП) можно использовать корреляционный сумматор-накопитель, который будет накапливать синфазные компоненты сигнала и удалять противофазные. При этом операция вычитания сигнала из его задержанной копии эквивалентна сложению противофазных сигналов, что позволяет удалять шум, имеющий стационарный характер на каждой итерации работы корреляционного сумматора-накопителя. При сложении синфазных и противофазных компонент всегда возникает сигнал ошибки вследствие несоблюдения условия, когда частота дискретизации должна быть кратна частоте промышленной сети Fd=N*Tc, где Fd - частота дискретизации; Тс - период промышленной частоты. Однако, если сигнал ошибки периодичен на интервале Т и, следовательно, имеет стационарный характер, то его можно удалить на следующей итерации путем его вычитания из задержанной копии сигнала, в то время как полезный сигнал возмущения, поданный в противофазе относительно своей задержанной копии, после вычитания удвоится. Таким образом, уже на третьей итерации корреляционного сумматора-накопителя в результирующем сигнале можно полностью удалить противофазные компоненты с частотами, кратными частоте промышленной сети, что дает возможность обработки полезных сигналов на уровне единиц и десятков милливольт. Используя данный способ можно реализовать одно-, двух-, и т.д n-каскадные сумматоры. Следует заметить, что однокаскадный сумматор, например, используемый в [2], не обеспечивает полного подавления сигнала несимметрии, и требует точной синхронизации времени задержки Т с частотой сети. Двухкаскадный сумматор принципиально свободен от указанного недостатка, поэтому ниже будет рассмотрен один из вариантов его реализации.
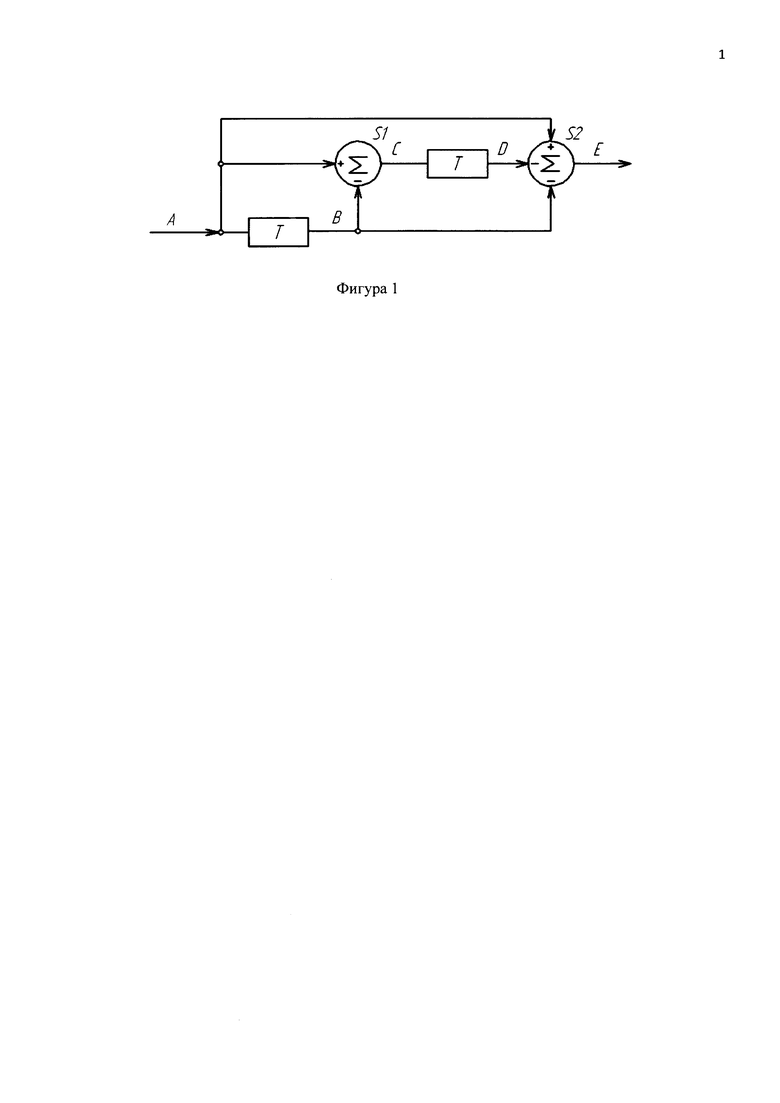
Для пояснения принципа действия способа на фигуре 1 приведена схема двухкаскадного сумматора-накопителя, использующего предлагаемый способ.
Сумматор-накопитель состоит из первой и второй линий задержек Т с временем задержки Т, равным периоду следования серии импульсов и кратным периоду промышленной частоты, первого сумматора S1, имеющего не инвертирующий и инвертирующий входы, второго сумматора S2, имеющего один не инвертирующий и два инвертирующих входа, соединенных между собой таким образом, что входной сигнал несимметрии поступает на вход первой линии задержки и соединенные вместе положительные входы сумматоров, выход первой линии задержки Т подключен к соединенным вместе отрицательным входам сумматоров, в то время как вторая линия задержки включена между выходом первого сумматора и дополнительным отрицательным входом второго сумматора. Сумматоры S1 и S2 имеют одинаковые по модулю коэффициенты передачи, равные К=1 для не инвертирующих входов и К=-1 для инвертирующих. Сумматор-накопитель, выполненный по данной схеме ,имеет коэффициент усиления сигнала свободной составляющей Ку=4 и двукратное вычитание сигнала несимметрии.
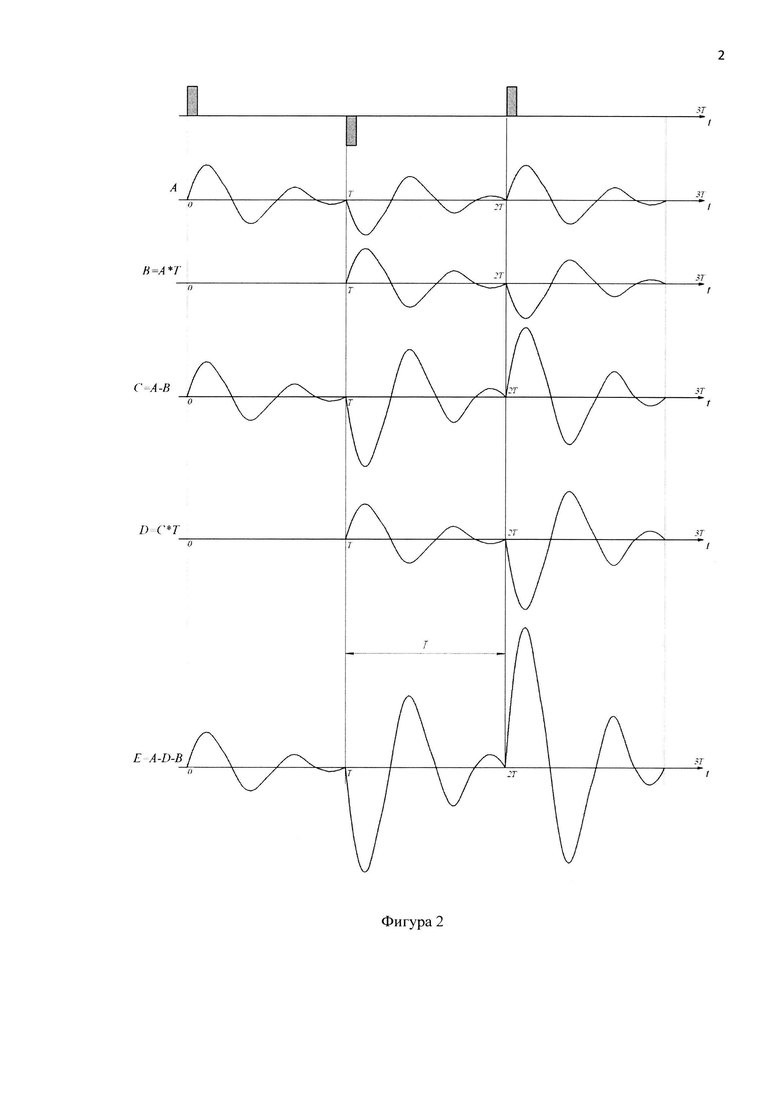
Как видно на фигуре 2, зондирующий сигнал тока наложения подается в КНП в виде 3-х одиночных импульсов переменной полярности. Соответствующее напряжение возмущения А с выхода трансформатора напряжения секции подается на вход сумматора-накопителя и, как видно из осциллограммы, трижды меняет свою фазу относительно начала интервала Т. Так как сигнал В появляется на выходе линии задержки через время Т в той же полярности, то его вычитание из инверсного сигнала А приводит к сложению амплитуд на выходе С. Следует отметить, что сигнал несимметрии (не показан на чертежах) всегда присутствует на всех интервалах времени Т без изменения фазы и в идеальных условиях после вычитания из своей задержанной копии сигнал помехи на выходе С становится близким к нулю уже на первом интервале. На втором интервале сигнал в точке С будет равен С=-2*А. Сигнал D отстает от сигнала С на интервал задержки Т. На третьем интервале на входе сумматора имеем сигнал А в прямой полярности, сигнал В=-А и сигнал D=-2*А. Следует отметить, что на практике из-за не идеальности параметров линии задержки на первом и третьем интервалах после вычитания сигналов всегда появляется сигнал ошибки, однако в выходном сигнале Е эти компоненты будут отсутствовать, так как будут просуммированы в S2 с разными знаками. Это обстоятельство позволяет уменьшить требования к точности измерения частоты сети с целью коррекции параметра линии задержки Т, допуская тем самым наличие сигнала ошибки на промежуточных этапах работы сумматора-накопителя.
Устройство автоматической настройки ДГР
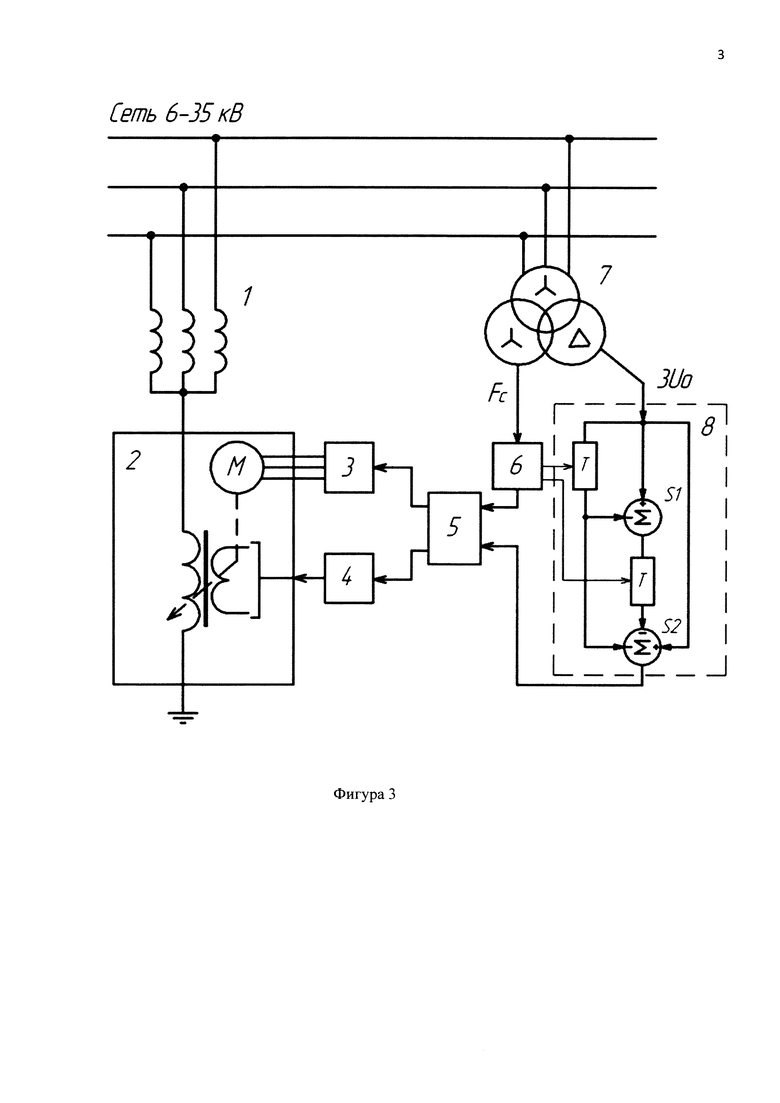
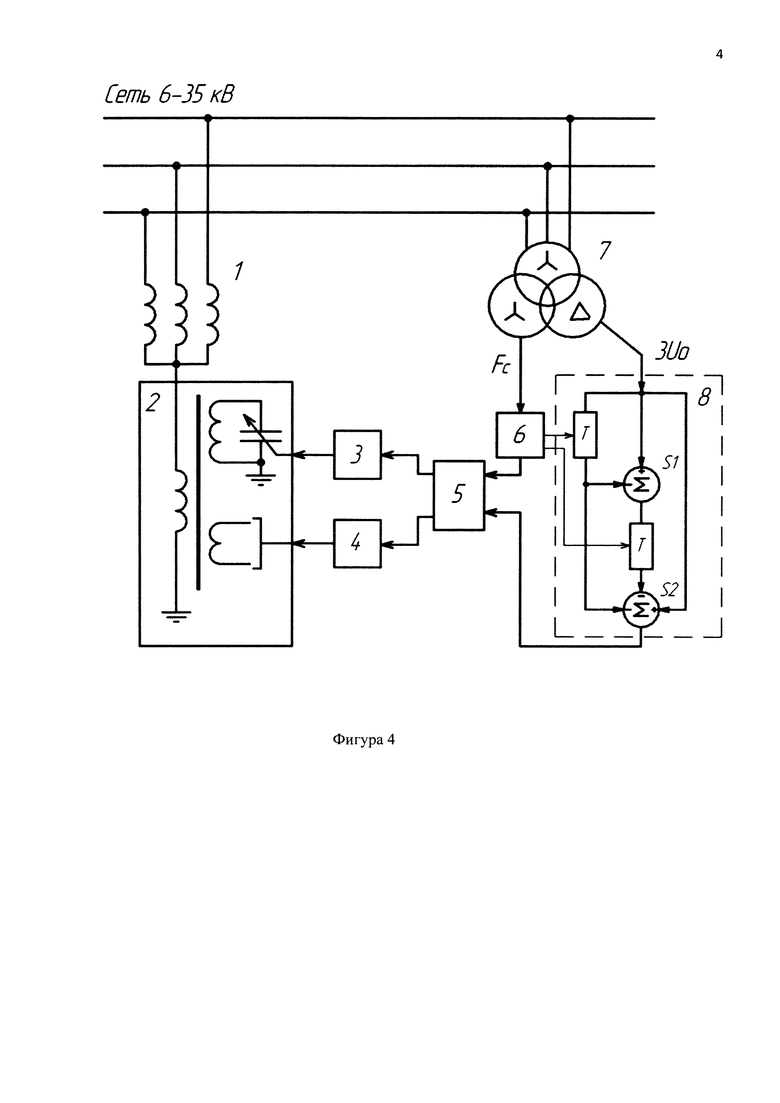
На основе данного способа реализовано устройство для автоматического управления плунжерным (или статическим) ДГР, см. фигуру 3(4). Схема содержит электрическую сеть с компенсированной нейтралью напряжением 6-35 кВ с коммутируемыми электрическими линиями и их фазными емкостями, нейтралеобразующий трансформатор 1, дугогасящий реактор 2 с приводом М, с подключенным к нему блоком управления приводом (секциями конденсаторов) 3, формирователь импульсов 4, подключенный к сигнальной обмотке дугогасящего реактора и блоку управления режимом компенсации 5, измеритель частоты сети 6, который подключен к обмотке «звезда» измерительного трансформатора напряжения 7, сумматор-накопитель 8, подключенный своим входом к обмотке «разомкнутый треугольник» трансформатора 7. При этом выход измерителя частоты подключен к первому входу блока 5, а выход сумматора накопителя ко второму входу блока 5. Кроме того, измеритель частоты сети 6 имеет два дополнительных выхода для управления параметрами линий задержек Т сумматора накопителя 8.
Устройство работает следующим образом. В нормальном режиме работы сети, когда отсутствуют какие-либо возмущающие факторы, сигнал на выходе сумматора накопителя отсутствует, при этом измеритель частоты сети 6 отслеживает изменения частоты промышленной частоты, корректирует параметр Т линий задержки и частоту дискретизации, уменьшая таким образом сигнал ошибки сумматора накопителя. В соответствии с алгоритмом блок управления режимом компенсации 5 через формирователь импульсов 4 подает серию импульсов тока разной полярности в сигнальную обмотку ДГР и по завершению серии запускает цикл вычисления собственной частоты КНП. Количество импульсов в серии выбирается исходя из добротности сети и может быть от 1-3 для сетей с высокой добротностью и до 7 в сетях с низкой добротностью. При наличии информации о собственной частоте сети период следования импульсов внутри серии выбирается близким или равным периоду свободных колебаний КНП. При первом включении устройства, когда собственная частота контура не известна, используются серия из одного импульса соответствующей полярности, при этом определяется только собственная частота КНП, последующие воздействия на сигнальную обмотку выполняются сериями из нескольких импульсов с последующим уточнением собственной частоты и расчетом основных параметров КНП. Блок управления режимом компенсации 5 сравнивает частоту свободных колебаний КНП с промышленной частотой и по результатам сравнения формирует управляющее воздействие через блок управления приводом (секциями конденсаторов) 3, который перемещая плунжер (изменяя емкость секции конденсаторов) увеличивает или уменьшает индуктивный (емкостной) ток реактора 2. Выходными величинами блока управления режимом компенсации 5 являются текущая величина коэффициента расстройки КНП сети, добротность контура, коэффициент затухания. При этом расстройка контура нулевой последовательности вычисляется по формуле
 ,
,
где fo - собственная частота контура; ƒс - частота промышленной сети.
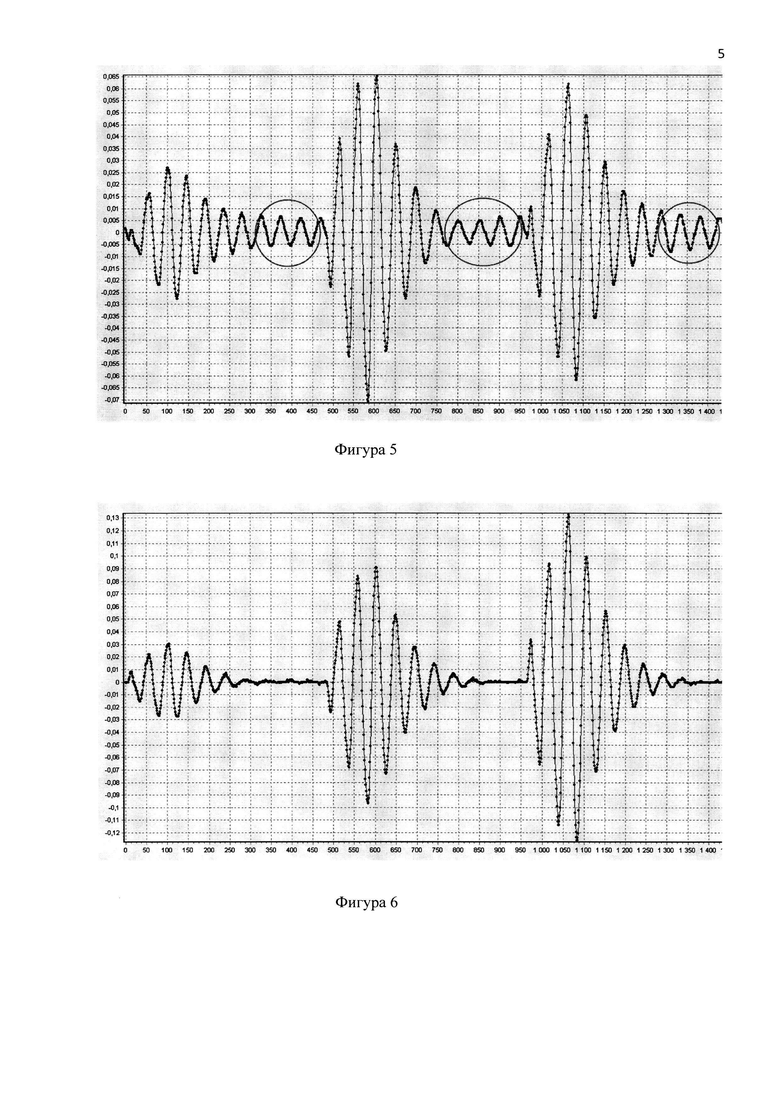
Экспериментальные осциллограммы работы устройства приведены на фигурах 5 и 6.
Описание чертежей
На фигуре 1 показана функциональная схема сумматора-накопителя, где S1 и S2 аналоговые сумматоры, Т - линия задержки. А - входной сигнал возмущения, В, С, D внутренние сигналы схемы, Е - выходной сигнал свободной составляющей.
На фигуре 2 показаны осциллограммы сигналов в характерных точках А, В, С, D, Е сумматора-накопителя, Т - параметр линии задержки. А - входной сигнал возмущения, В, С, D внутренние сигналы схемы, Е - выходной сигнал свободной составляющей.
На фигуре 3 показана функциональная схема устройства автоматической настройки плунжерного ДГР с механическим приводом М. Выделение свободной составляющей на фиг. 3 происходит в сумматоре накопителе 8. На фигуре 4 показана функциональная схема устройства автоматической настройки для статического ДГР. Выделение свободной составляющей на фиг.4 также происходит в сумматоре накопителе 8. Для фигур 3, 4 Fc - сигнал синхронизации, 3Uo - сигнал несимметрии, снимаемые соответственно с обмоток «звезда» и «разомкнутый треугольник» измерительного трансформатора 7.
На фигурах 5 и 6 показана осциллограммы выходных сигналов на выходе первого сумматора S1 (фигура 5) и на выходе второго сумматора S2 (фигура 6). На обеих фигурах шкала по оси Y представлена в вольтах, сигнал несимметрии, оставшийся после первого вычитания (фигура 5), выделен эллипсом. Как видно на фигуре 6, сигнал несимметрии на выходе устройства пренебрежимо мал.
Высокая точность измерений и настройки в данном способе достигается за счет:
- увеличения амплитуды полезного сигнала посредством синфазного способа подачи импульсов «накачки» в контуре нулевой последовательности сети;
- увеличения амплитуды полезного сигнала в несколько раз посредством статистического накопления полезного сигнала после серии возмущений в сумматоре-накопителе;
- уменьшения сигнала несимметрии за счет 2-кратного вычитания в сумматоре накопителе;
- уменьшения погрешности измерений путем коррекции частоты дискретизации и времени задержки Т в зависимости от текущей частоты сети, что обеспечивает стационарность процесса измерений.
Проведенные испытания доказали работоспособность заявляемого способа, а также достижение заявляемого результата: повышение точности настройки и достоверности результата измерения.
Литература
1. Патент на изобретение №2475915. Способ настройки компенсации емкостных токов замыкания на землю в электрических сетях. Ильин В.Ф., Петров М.И., Соловьев И.В. Опубликовано в Бюл. №5 20.02.2013 г.
2. Патент на полезную модель №147273. Устройство управления настройкой дугогасящего реактора. Березкин Е.Д., Марченко Г.Н. Опубликовано в Бюл. №30 27.10.2014 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ настройки режима компенсации емкостных токов в электрических сетях | 2015 |
|
RU2606952C1 |
| Устройство наложения контрольного тока | 2015 |
|
RU2606373C1 |
| Способ измерения эквивалентной емкости сети и устройство для его осуществления | 2016 |
|
RU2667313C2 |
| СПОСОБ НАСТРОЙКИ КОМПЕНСАЦИИ ЕМКОСТНЫХ ТОКОВ ЗАМЫКАНИЯ НА ЗЕМЛЮ (ВАРИАНТЫ) | 2009 |
|
RU2402132C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ НАСТРОЙКИ ДУГОГАСЯЩЕГО РЕАКТОРА | 2009 |
|
RU2404501C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ЕМКОСТНЫХ ТОКОВ С СИММЕТРИРОВАНИЕМ ФАЗНЫХ НАПРЯЖЕНИЙ СЕТИ | 2018 |
|
RU2719632C1 |
| Способ и устройство измерения емкостного тока электрической сети с плавнорегулируемым дугогасящим реактором | 2019 |
|
RU2723898C1 |
| СПОСОБ НАСТРОЙКИ КОМПЕНСАЦИИ ЕМКОСТНЫХ ТОКОВ ЗАМЫКАНИЯ НА ЗЕМЛЮ В ЭЛЕКТРИЧЕСКИХ СЕТЯХ | 2006 |
|
RU2475915C2 |
| СПОСОБ НАСТРОЙКИ КОМПЕНСАЦИИ ЕМКОСТНЫХ ТОКОВ ЗАМЫКАНИЯ НА ЗЕМЛЮ В ЭЛЕКТРИЧЕСКИХ СЕТЯХ | 2006 |
|
RU2321132C1 |
| СПОСОБ СИММЕТРИРОВАНИЯ ФАЗНЫХ НАПРЯЖЕНИЙ СЕТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2686480C2 |
Изобретение относится к области электротехники и может быть использовано в составе устройств автоматической настройки статических и плунжерных дугогасящих реакторов (ДГР) в электрических сетях с изолированной и компенсированной нейтралью, а также в сетях с комбинированным режимом заземления и в устройствах для работы в сетях с пониженной добротностью и параллельным соединением нескольких ДГР. Технический результат изобретения заключается в повышении точности настройки и достоверности результатов измерений во всем диапазоне регулирования ДГР. В способе выделения свободной составляющей в контуре нулевой последовательности электрической сети и устройстве автоматической настройки дугогасящего реактора на его основе для возбуждения затухающих колебаний в контуре нулевой последовательности (КНП) применяют серии импульсов чередующейся полярности, оцифровывают входные аналоговые значения сигналов возмущения, используя расчетное значение частоты дискретизации Fd, выделение свободной составляющей производят по специальному алгоритму в сумматоре-накопителе, определяют значение расстройки и при выходе ее значения за пределы, заданные уставками, воздействуют на изменение индуктивного или емкостного тока ДГР. 2 н. и 2 з.п. ф-лы, 6 ил.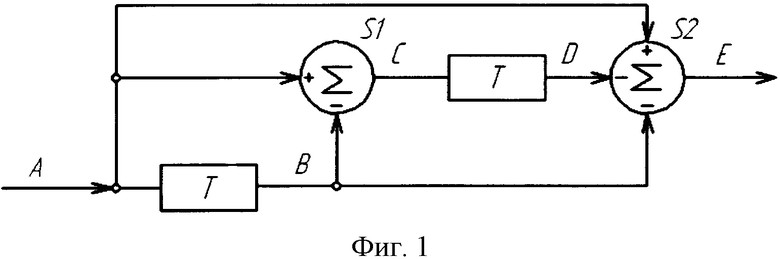
1. Способ выделения свободной составляющей в КНП электрической сети, заключающийся в том, что формируют опорный ток возмущения в КНП, контролируют напряжение нулевой последовательности, частоту промышленной сети, отличающийся тем, что выделение свободной составляющей производится в несколько этапов в сумматоре-накопителе таким образом, что свободная составляющая комплексного сигнала возмущения складывается со своей задержанной копией в фазе, а сложение сигнала несимметрии со своей задержанной копией производится в противофазе, при этом время задержки Т должно быть равно целому количеству периодов N промышленной частоты.
2. Способ выделения свободной составляющей по п. 1, отличающийся тем, что для возбуждения затухающих колебаний в контуре нулевой последовательности формируют опорный ток в виде серии импульсов чередующейся полярности с периодом следования серий, равным параметру линии задержки Т.
3. Устройство автоматической настройки дугогасящего реактора, содержащее формирователь знакопеременных импульсов, блок управления дугогасящим реактором, блок управления режимом компенсации, измеритель частоты сети, отличающееся тем, что содержит сумматор-накопитель, состоящий из двух сумматоров и двух регулируемых линий задержки, соединенных между собой таким образом, что входной сигнал несимметрии поступает на вход первой линии задержки и соединенные вместе положительные входы сумматоров, выход первой линии задержки подключен к соединенным вместе отрицательным входам сумматоров, в то время как вторая линия задержки включена между выходом первого сумматора и дополнительным отрицательным входом второго сумматора.
4. Устройство автоматической настройки дугогасящего реактора по п. 3, отличающееся тем, что измеритель частоты сети подключен своими выходами к регулируемым линиям задержки для управления параметром Т.
| СПОСОБ НАСТРОЙКИ КОМПЕНСАЦИИ ЕМКОСТНЫХ ТОКОВ ЗАМЫКАНИЯ НА ЗЕМЛЮ В ЭЛЕКТРИЧЕСКИХ СЕТЯХ | 2006 |
|
RU2475915C2 |
| Внутренний центратор для сварки поворотных стыков труб | 1961 |
|
SU147273A1 |
| РОТОРНАЯ МАШИНА | 1997 |
|
RU2115807C1 |
| JP 4830705 B2, 07.12.2011 | |||
| Устройство для ввода информации | 1974 |
|
SU499565A1 |
| US 5986860 A1, 16.11.1999 | |||
| WO 1997030501 A1, 21.08.1997. | |||

