ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка является Международный патентной заявкой РСТ, претендующей на приоритет заявки на патент США №13/027003, содержание которой полностью включается в настоящую заявку.
УРОВЕНЬ ТЕХНИКИ
В хирургии хирургический шовный материал пропускается через ткани для закрытия ран или хирургических разрезов. Хирургический шовный материал удерживает вместе одну или большее количество тканей в течение определенного промежутка времени. Вследствие ограниченности и иногда отсутствия гибкости в месте операционного вмешательства, хирурги и другой медицинский персонал должны использовать специализированные инструменты для введения в рану хирургического шовного материала. Конкретнее, манипулирование хирургическим шовным материалом, такое как прокалывание ткани для последующего освобождения хирургического шовного материала и/или возврата хирургического шовного материала для завершения наложения шва, требует специализированных инструментов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В общем, в одном аспекте настоящее изобретение относится к устройству манипулирования хирургическим шовным материалом. Данное устройство манипулирования хирургическим шовным материалом включает корпус и ловушку. Ловушка функционально соединена с корпусом и приспособлена для (1) обеспечения выдвижения из корпуса, (2) поворачивания, после выдвижения из корпуса, независимо от корпуса, (3) захвата участка хирургического шовного материала проходящего через ткань при поворачивании, и (4) закрепления данного участка хирургического шовного материала.
В общем, в одном аспекте, настоящее изобретение относится к устройству манипулирования хирургическим шовным материалом. Данное устройство манипулирования хирургическим шовным материалом включает ловушку с приемным концом, который приспособлен для (1) поддержки ткани, (2) захвата участка хирургического шовного материала, прошедшего через ткань и приемный конец, (3) удаления поддержки ткани, (4) закрепления, при удалении поддержки ткани, данного участка хирургического шовного материала с использованием приемного конца, и (5) удаления, с использованием приемного конца, этого участка хирургического шовного материала.
В общем, в одном аспекте, настоящее изобретение относится к способу манипулирования хирургическим шовным материалом. Данный способ включает (1) вытягивание ловушки из корпуса устройства манипулирования хирургическим шовным материалом, (2) поворачивание ловушки независимо от корпуса устройства манипулирования хирургическим шовным материалом, (3) захват участка хирургического шовного материала ловушкой при поворачивании ловушки, и (4) закрепление данного участка хирургического шовного материала.
В общем, в одном аспекте, настоящее изобретение относится к способу манипулирования хирургическим шовным материалом. Данный способ включает (1) обеспечение поддержки ткани с использованием ловушки устройства манипулирования хирургическим шовным материалом, (2) захват участка хирургического шовного материала с использованием ловушки и без перемещения ловушки тогда, когда данный участок хирургического шовного материала проходит через ткань и освобождается иглой, (3) закрепление, при удалении поддержки ткани, этого участка хирургического шовного материала ловушкой, и (4) удаление из ткани ловушки с этим участком хирургического шовного материала.
Другие аспекты настоящего изобретения станут очевидными из следующего приводимого ниже описания и прилагаемой формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На Фиг.1A и 1B показан известный в данной области техники инструмент для наложения шва, приспособленный для удаления хирургического шовного материала.
На каждом из Фиг.2A и 2B показана блок-схема способа согласно одному или большему количеству вариантов реализации настоящего изобретения.
На Фиг.3A-3D показан инструмент для наложения шва с возможностью извлечения хирургического шовного материала согласно одному или большему количеству вариантов реализации настоящего изобретения.
На Фиг.4A-4D показано поворачивание ловушки согласно одному или большему количеству вариантов реализации настоящего изобретения.
На Фиг.5 показано втягивание ловушки согласно одному или большему количеству вариантов реализации настоящего изобретения.
На Фиг.6A-6D показано поворачивание ловушки согласно одному или большему количеству вариантов реализации настоящего изобретения.
На Фиг.7A-7D показано втягивание ловушки согласно одному или большему количеству вариантов реализации настоящего изобретения.
На Фиг.8 показан пример инструмента для наложения шва с возможностью извлечения хирургического шовного материала согласно одному или большему количеству вариантов реализации настоящего изобретения.
На Фиг.9A-10B показан пример извлечения хирургического шовного материала согласно одному или большему количеству вариантов реализации настоящего изобретения.
На Фиг.11A-11H показан пример извлечения хирургического шовного материала согласно одному или большему количеству вариантов реализации настоящего изобретения.
На Фиг.12A-12D показан пример извлечения хирургического шовного материала согласно одному или большему количеству вариантов реализации настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Теперь будут подробно описаны конкретные варианты реализации настоящего изобретения со ссылкой на сопроводительные рисунки. Похожие элементы на различных рисунках для согласованности обозначаются одинаковыми числовыми обозначениями.
В приводимом ниже подробном описании вариантов реализации настоящего изобретения различные конкретные детали приводятся с целью обеспечения более полного понимания настоящего изобретения. Однако специалистам в данной области должно быть понятно, что настоящее изобретение может быть реализовано на практике и без этих конкретных деталей. В других примерах подробно не описывались хорошо известные свойства, чтобы избежать ненужного усложнения данного описания.
В общем, варианты реализации настоящего изобретения описывают способ и устройство манипулирования хирургическим шовным материалом. Конкретнее, один или большее количество вариантов реализации настоящего изобретения обеспечивают выдвижение ловушки из корпуса устройства манипулирования хирургическим шовным материалом. После выдвижения ловушка поворачивается независимо от корпуса устройства манипулирования хирургическим шовным материалом для захвата участка хирургического шовного материала. Ловушка затем фиксирует данный участок хирургического шовного материала. Согласно одному или большему количеству вариантов реализации настоящего изобретения толкатель, расположенный в полости корпуса устройства манипулирования хирургическим шовным материалом, используется для управления ловушкой. Когда толкатель отводится, ловушка может также быть отведена. Толкатель может также поворачиваться независимо от корпуса устройства манипулирования хирургическим шовным материалом. Например, устройство манипулирования хирургическим шовным материалом само может не поворачиваться при повороте ловущки в случае управления с помощью толкателя, например, при выполнении захвата хирургического шовного материала. Как принято в настоящем описании, хирургический шовный материал может означать нить для наложения шва.
Согласно одному или большему количеству вариантов реализации настоящего изобретения манипуляция хирургическим шовным материалом может включать проталкивание хирургического шовного материала через ткань, перемещение хирургического шовного материала, сброс хирургического шовного материала (то есть, освобождение хирургического шовного материала, по меньшей мере, частичное, из иглы), извлечение хирургического шовного материала, удаление хирургического шовного материала и/или другое перемещение хирургического шовного материала. Как принято в настоящем описании, устройством манипулирования хирургическим шовным материалом может быть толкатель хирургического шовного материала, челнок для хирургического шовного материала, извлекатель хирургического шовного материала, и/или любое другое соответствующее устройство манипулирования хирургическим шовным материалом. Другими словами, устройство манипулирования хирургическим шовным материалом может настраиваться для манипулирования хирургическим шовным материалом и/или для челночного перемещения. Как принято в настоящем описании, хирургический шовный материал может быть постоянным (то есть, используемым для создания шва) или временным (например, для проходящего через ткань челнока, где конец челнока связан с постоянным хирургическим шовным материалом, используемым для создания шва).
Варианты реализации настоящего изобретения предназначены для поддержки создания одного или большего количества швов. В шве используется хирургический шовный материал для удержания на месте одного или большего количества материалов в течение некоторого периода времени. Шов образуется тогда, когда вводится хирургический шовный материал и проталкивается (то есть, проходит) через ткань. Ткань может включать, без ограничения, эпителиальную и другую слоеную покровную ткань (например, внешний слой кожи и ткань, окружающую такие внутренние органы, как печень), соединительную ткань (например, внутренний слой кожи, сухожилия, связки, хрящи, кости, жировая клетчатка), мышечную ткань и нервную ткань. Хирургический шовный материал может быть любым хирургическим шовным материалом, используемым в хирургии и других подобных процедурах. Например, хирургический шовный материал может находиться в диапазоне размеров от #11/0 согласно Фармакопее США (USP) до #7 USP. Далее, хирургический шовный материал может производиться из нескольких материалов, включая, без ограничения, шелк, кетгут, полигликолиевую кислоту, полимолочную кислоту, полидиоксанон, нейлон и полипропилен. Варианты реализации настоящего изобретения могут использоваться для манипулирования (например, проталкивания, захвата, закрепления, извлечения) хирургическим шовным материалом внутри тела (например, человека, животного) и/или вне тела (в случае поверхностной раны).
Используемый в настоящем описании термин дистальный означает наиболее удаленную точку. Также термин проксимальный означает самую близкую точку. Ракурс, исходя из которого здесь описываются удаленность и близость, соответствует оператору устройства, состоящего из одного или большего количества компонентов. Конкретнее, в вариантах реализации настоящего изобретения описывается устройство (например, извлекатель хирургического шовного материала, челнок для хирургического шовного материала), используемое в хирургических применениях для наложения шва на рану или другие отверстия в ткани. Дистальный конец при этом описывает конец данного устройства (или компонента данного устройства), самый близкий к ткани (то есть, самый удаленный от пользователя данного устройства). Аналогично, проксимальный конец описывает конец данного устройства (или компонента данного устройства), самый близкий к пользователю данного устройства (то есть, дальше всего удаленный от ткани). Кроме того, как принято в настоящем описании, пользователем может быть любое лицо, создающее швы в ткани, включая, без ограничения, хирургов, медсестер, технических специалистов или ветеринаров.
На Фиг.1A и 1B показано известное в данной отрасли техники устройство манипулирования хирургическим шовным материалом (например, извлекатель хирургического шовного материала). Как показано на Фиг.1A, такое устройство манипулирования хирургическим шовным материалом включает вал (102), заостренный конец (104), и прихват (106), образующий зазор (108) между частью вала (102) и нижней частью прихвата (106). Конец прихвата (106) может входить в паз (110) на валу (102), когда прихват (106) находится в закрытом состоянии. Прихват (106), показанный на Фиг.1A, находится в закрытом состоянии, которое может использоваться при введении устройства манипулирования хирургическим шовным материалом в область для манипулирования хирургическим шовным материалом. Материал, из которого выполнен вал (102), заостренный конец (104) (например, игла) и прихват (106), может быть одним и тем же, или включать один или большее количество различных материалов. Устройство манипулирования хирургическим шовным материалом может быть изготовлено для многократного или временного (например, однократного) применения.
На Фиг.1B показано устройство манипулирования хирургическим шовным материалом по Фиг.1A, в котором прихват (126) находится в открытом состоянии. Конкретнее, прихват (126) находится в открытом состоянии для закрепления хирургического шовного материала. Прихват (126) может открываться одним из ряда способов, включая освобождение защелки путем давления на шарнир, или некоторым другим соответствующим способом. Механизм, используемый для открытия прихвата, может располагаться в одном или более местах, включая, без ограничения, шарнир прихвата (126) на корпусе (122) и паз (130). Когда прихват (126) открыт, зазор (128) в сочетании с пазом (130) может использоваться для захвата хирургического шовного материала.
Устройство манипулирования хирургическим шовным материалом, как описано выше применительно к Фиг.1A и 1B, может конфигурироваться для осуществления манипуляции (например, проведения, выброса, извлечения) хирургическим шовным материалом и/или челноком для хирургического шовного материала. Примеры известных устройств манипулирования хирургическим шовным материалом включают, без ограничения, челноки для хирургического шовного материала компании ACCU-PASS®. (ACCU-PASS® является зарегистрированной торговой маркой компании Smith & Nephew, Inc. из Мемфиса, шт. Теннесси, США).
На каждом из Фиг.2A и 2B показана блок-схема способа манипулирования хирургическим шовным материалом согласно одному или большему количеству вариантов реализации настоящего изобретения. В то время как в этих блок-схемах представлены и последовательно описаны различные этапы, некоторые или все эти этапы могут выполняться в различном порядке, они могут комбинироваться или пропускаться, и некоторые или все эти этапы могут выполняться параллельно. Затем, в одном или большем количестве вариантов реализации настоящего изобретения, один или большее количество этапов, описанных ниже, могут пропускаться, повторяться и/или выполняться в другом порядке. Кроме того, при выполнении этих способов могут включаться дополнительные этапы, пропущенные на Фиг.2A и 2B. Таким образом, конкретный порядок этапов, показанный на Фиг.2A и 2B, не должен истолковываться как ограничивающий объем настоящего изобретения.
Со ссылкой на Фиг.2A описан один способ манипулирования хирургическим шовным материалом согласно одному или большему количеству вариантов реализации настоящего изобретения. На Этапе 202 хирургический шовный материал проходит через ткань с использованием иглы. Игла может быть частью устройства манипулирования хирургическим шовным материалом без возможности извлечения хирургического шовного материала или устройства манипулирования хирургическим шовным материалом с возможностью извлечения хирургического шовного материала. Устройство манипулирования хирургическим шовным материалом может быть любым устройством, способным выполнять прохождение (то есть, прокалывание) ткани и закрепление хирургического шовного материала так, как это выполняет устройство манипулирования хирургическим шовным материалом, которое вместе с хирургическим шовным материалом проходит за ткань. Устройство манипулирования хирургическим шовным материалом может включать проникающий компонент (то есть, иглу) на дистальном конце. Игла устройства манипулирования хирургическим шовным материалом может быть прямой или изогнутой. Поперечное сечение иглы может быть круглым, овальным или иметь любую другую соответствующую форму. Игла может иметь диаметр (или длину основных осей), который может быть таким малым, как 1 мм (или меньше), или таким большим, как 2,5 мм (или больше). Размер иглы может зависеть от размера (например, диаметра) хирургического шовного материала. Игла может быть длиной несколько дюймов, и ее проксимальный конец может быть прикреплен к корпусу, который может включать ручку.
На Этапе 204 хирургический шовный материал освобождается из иглы. Согласно одному или большему количеству вариантов реализации настоящего изобретения хирургический шовный материал может освобождаться из иглы с использованием естественных усилий. Например, если игла проходит расстояние (например, один дюйм) после ткани и ловушки, то трение, создаваемое внутри корпуса элементами, принимающими хирургический шовный материал, может быть достаточным для освобождения хирургического шовного материала из иглы при отводе этой иглы. Хирургический шовный материал также может освобождаться из устройства манипулирования хирургическим шовным материалом с использованием определенного управления. Это управление может быть ручным (например, пользователь нажимает кнопку) или автоматическим (например, хирургический шовный материал освобождается после того, как устройство манипулирования хирургическим шовным материалом проходит пять миллиметров после ткани). Также это управление может располагаться на устройстве манипулирования хирургическим шовным материалом (например, на ручке устройства манипулирования хирургическим шовным материалом) или выполняться на удалении от устройства манипулирования хирургическим шовным материалом (например, дистанционное управление). Например, устройство манипулирования хирургическим шовным материалом может включать ловушку (например, крючок), удерживающую хирургический шовный материал во втянутом состоянии, когда устройство манипулирования хирургическим шовным материалом прокалывает и проходит через ткань. Ловушка затем может выдвигаться и/или поворачиваться для выброса (то есть, освобождения) хирургического шовного материала из устройства манипулирования хирургическим шовным материалом. Ловушка может освобождать весь хирургический шовный материал или его участок.
Дополнительно, на Этапе 205, если устройство манипулирования хирургическим шовным материалом представляет собой инструмент, отличающийся от зашивающего устройства, выполняется удаление устройства манипулирования хирургическим шовным материалом из ткани после освобождения из иглы хирургического шовного материала. Необязательный Этап 205 также может выполняться в случае, если хирургический шовный материал возвращается назад через различные ткани или ту же самую ткань, но находящуюся в области вблизи от точки ткани, через которую проходило устройство манипулирования хирургическим шовным материалом. Затем, на Этапе 206, устройство манипулирования хирургическим шовным материалом вводится в ткань. Согласно одному или большему количеству вариантов реализации настоящего изобретения устройство манипулирования хирургическим шовным материалом, используемое для пропускания хирургического шовного материала, отличается от устройства манипулирования хирургическим шовным материалом, используемого для извлечения хирургического шовного материала. Устройство манипулирования хирургическим шовным материалом может вводиться в ту же самую ткань в месте, расположенном вблизи от места введения хирургического шовного материала с использованием устройства манипулирования хирургическим шовным материалом на Этапе 202. В качестве альтернативы, устройство манипулирования хирургическим шовным материалом может вводиться в другую (например, соседнюю) ткань, отличающуюся от ткани, через которую проходил хирургический шовный материал с помощью устройства манипулирования хирургическим шовным материалом.
На Этапе 208 выполняется выдвижение ловушки устройства манипулирования хирургическим шовным материалом. Данный Этап 208 выполняется в том случае, если ловушка еще не выдвинута. Ловушка может выдвигаться из устройства манипулирования хирургическим шовным материалом с использованием определенного управления. Это управление может быть ручным (например, пользователь нажимает кнопку) или автоматическим (например, ловушка освобождается после того, как устройство манипулирования хирургическим шовным материалом перемещается на расстояние десять миллиметров дальше ткани). Также это управление может располагаться на устройстве манипулирования хирургическим шовным материалом (например, на ручке устройства манипулирования хирургическим шовным материалом) или выполняться на удалении от устройства манипулирования хирургическим шовным материалом (например, дистанционное управление).
Дополнительно на Этапе 210 выполняется поворачивание ловушки. Согласно одному или большему количеству вариантов реализации настоящего изобретения ловушка поворачивается для захвата хирургического шовного материала. Ловушка может поворачиваться основанием этой ловушки таким образом, что само устройство манипулирования хирургическим шовным материалом не поворачивается. Ловушка может также поворачиваться в осевом направлении путем ее вращения вдоль продольной и/или радиальной оси ловушки. Ловушка может также поворачиваться с использованием сочетания описанных здесь вращений и/или других вращений, известных в настоящей области техники. Ловушка может поворачиваться на один или больше полных оборотов, или на часть оборота. Ловушка может поворачиваться по часовой стрелке и против часовой стрелки. Ловушка может поворачиваться устройством манипулирования хирургическим шовным материалом с использованием определенного управления. Это управление может быть ручным (например, пользователь нажимает кнопку) или автоматическим (например, ловушка поворачивается в течение одной секунды после ее выдвижения из устройства манипулирования хирургическим шовным материалом). Также это управление может располагаться на устройстве манипулирования хирургическим шовным материалом (например, на ручке устройства манипулирования хирургическим шовным материалом) или выполняться на удалении от устройства манипулирования хирургическим шовным материалом (например, дистанционное управление).
На Этапе 212 выполняется захват хирургического шовного материала ловушкой. Если ловушка поворачивается, тогда при таком ее повороте может выполняться захват хирургического шовного материала. Захват хирургического шовного материала также может осуществляться одним из ряда других способов. Например, пользователь может позиционировать хирургический шовный материал внутри ловушки таким образом, чтобы он захватывался ловушкой. В качестве другого примера, устройство манипулирования хирургическим шовным материалом (или некоторой его частью) может перемещаться некоторым определенным образом для осуществления захвата данного хирургического шовного материала в ловушке.
Дополнительно, на Этапе 214, ловушка втягивается в устройство манипулирования хирургическим шовным материалом. Втягивание ловушки в устройство манипулирования хирургическим шовным материалом может быть частичным (например, тринадцать миллиметров при возможном последующем отводе) или полным (то есть, ловушка не может втянута более). Ловушка может втягиваться в устройство манипулирования хирургическим шовным материалом с использованием определенного управления. Это управление может быть ручным (например, пользователь нажимает кнопку) или автоматическим (например, ловушка втягивается после того, как она повернулась на один полный оборот). Также это управление может располагаться на устройстве манипулирования хирургическим шовным материалом (например, на ручке устройства манипулирования хирургическим шовным материалом) или выполняться на удалении от устройства манипулирования хирургическим шовным материалом (например, дистанционное управление). Согласно одному или большему количеству вариантов реализации настоящего изобретения хирургический шовный материал фиксируется ловушкой без втягивания ловушки в устройство манипулирования хирургическим шовным материалом.
На Этапе 216 выполняется определение того, закреплен ли хирургический шовный материал. Определение закрепления хирургического шовного материала может выполняться вручную (например, визуально пользователем, с использованием просмотрового устройства (например, эндоскопа при артроскопической хирургии)) или автоматически. Определение закрепления хирургического шовного материала может осуществляться автоматически с использованием одного или большего количества датчиков и/или других устройств, приспособленных для обеспечения такого определения. Например, датчик может приспосабливаться для обеспечения измерения величины усилия (например, давления), требуемого для втягивания ловушки. В таком случае, если используемое для втягивания ловушки усилие ниже порогового усилия, тогда датчик сигнализирует пользователю о незакрепленности хирургического шовного материала и о необходимости отвода и повторного поворота ловушки для закрепления хирургического шовного материала. В качестве альтернативы, когда используемое для втягивания ловушки усилие ниже порогового усилия, датчик может автоматически отводить и/или снова поворачивать ловушку для закрепления хирургического шовного материала. Если хирургический шовный материал не закрепляется, тогда процесс снова возвращается к Этапу 208. Если хирургический шовный материал закреплен, тогда процесс переходит к Этапу 218.
На Этапе 218 устройство манипулирования хирургическим шовным материалом с хирургическим шовным материалом извлекается из ткани. Устройство манипулирования хирургическим шовным материалом отводиться вручную (как например, пользователем) или автоматически (как например, с использованием автоматизированного процесса). Когда Этап 218 завершается, также завершается и данный процесс.
Со ссылкой на Фиг.2B описан другой способ манипулирования хирургическим шовным материалом согласно одному или большему количеству вариантов реализации настоящего изобретения. На Этапе 252 ткань закрепляется с использованием ловушки устройства манипулирования хирургическим шовным материалом. Ткань может закрепляться ловушкой одним из ряда способов. Например, ловушка может обеспечивать поддержку ткани путем ее фиксации на данной ткани, предоставления подпорки, на которой может располагаться ткань, обеспечения поддержки данной ткани с использованием некоторых других соответствующих способов закрепления ткани, или с использованием любого сочетания указанных способов. Согласно одному или большему количеству вариантов реализации настоящего изобретения ткань представляет собой мягкую ткань, которая может двигаться при прокалывании.
На Этапе 254 осуществляется выдвижение иглы для прокалывания ткани. Согласно одному или большему количеству вариантов реализации настоящего изобретения игла встроена в такое же устройство манипулирования хирургическим шовным материалом, как описанное выше устройство из Этапа 252. Игла может перемещаться независимо от устройства манипулирования хирургическим шовным материалом. Дистальный конец иглы может включать дальний конец, приспособленный для закрепления и/или освобождения хирургического шовного материала. Игла может выдвигаться с использованием определенного управления. Это управление может быть ручным (например, с нажатием на плунжер на ручке устройства манипулирования хирургическим шовным материалом) или автоматическим (например, игла выдвигается через три секунды после закрепления ткани ловушкой). Также это управление может располагаться на устройстве манипулирования хирургическим шовным материалом (например, на ручке устройства манипулирования хирургическим шовным материалом) или выполняться на удалении от устройства манипулирования хирургическим шовным материалом (например, дистанционное управление).
На Этапе 256 хирургический шовный материал проходит через ткань и ловушку с использованием иглы. Расстояние, которое хирургический шовный материал (то есть, дистальный конец иглы) проходит за ткань и ловушку, закрепляющую ткань, может изменяться. Более того, согласно одному или большему количеству вариантов реализации настоящего изобретения, устройство манипулирования хирургическим шовным материалом может быть сконфигурировано таким образом, чтобы игла после выхода из ткани проходила в основном вблизи ловушки.
На Этапе 258 хирургический шовный материал освобождается из иглы. Хирургический шовный материал может освобождаться из иглы с использованием естественных усилий. Например, если игла проходит расстояние (например, один дюйм) после ткани и ловушки, то создаваемое трение элементами внутри корпуса, принимающими хирургический шовный материал, может быть достаточным для освобождения хирургического шовного материала из иглы при отводе этой иглы. Хирургический шовный материал также может освобождаться из иглы с использованием определенного управления (например, освобождения стопорного зажима). Игла может освобождать весь хирургический шовный материал или его участок. Управление, при его наличии, используемое для освобождения хирургического шовного материала из иглы, может быть ручным (например, пользователь нажимает кнопку) или автоматическим (например, хирургический шовный материал освобождается после того, как устройство манипулирования хирургическим шовным материалом проходит пять миллиметров после ткани). Также это управление может располагаться на устройстве манипулирования хирургическим шовным материалом (например, на ручке устройства манипулирования хирургическим шовным материалом) или выполняться на удалении от устройства манипулирования хирургическим шовным материалом (например, дистанционное управление).
На Этапе 260 выполняется извлечение иглы из ткани. Согласно одному или большему количеству вариантов реализации настоящего изобретения, игла отводится в то время как ловушка устройства манипулирования хирургическим шовным материалом в основном остается на месте, обеспечивая поддержку ткани. Игла может извлекаться из ткани с использованием определенного управления. Это управление может быть ручным (например, нажатием плунжера на ручке устройства манипулирования хирургическим шовным материалом) или автоматическим (например, игла отводится после того, как она проходила через ткань в течение трех секунд). Также это управление может располагаться на устройстве манипулирования хирургическим шовным материалом (например, на ручке устройства манипулирования хирургическим шовным материалом) или выполняться на удалении от устройства манипулирования хирургическим шовным материалом (например, дистанционное управление).
На Этапе 262 хирургический шовный материал захватывается ловушкой. Согласно одному или большему количеству вариантов реализации настоящего изобретения ловушка захватывает хирургический шовный материал при отводе иглы назад. Ловушка может также выполнять захват хирургического шовного материала путем перемещения ловушки таким образом, чтобы она приобрела должную ориентацию для захвата хирургического шовного материала. Например, для обеспечения захвата хирургического шовного материала ловушка может перемещаться вверх по направлению к данному хирургическому шовному материалу.
На Этапе 264 выполняется определение того, закреплен ли хирургический шовный материал. Определение закрепления хирургического шовного материала может выполняться вручную (например, визуально пользователем, с использованием просмотрового устройства (например, эндоскопа при артроскопической хирургии)) или автоматически. Если хирургический шовный материал не закреплен, тогда процесс переходит к Этапу 266. Если хирургический шовный материал закреплен, тогда процесс переходит к Этапу 268.
На Этапе 266 осуществляется манипулирование ловушкой. Согласно одному или большему количеству вариантов реализации настоящего изобретения осуществляется манипулирование ловушкой для закрепления хирургического шовного материала в ловушке. После выполнения манипулирования ловушкой процесс снова возвращается к Этапу 264 для определения того, привело ли манипулирование ловушкой к закреплению хирургического шовного материала.
На Этапе 268 после закрепления хирургического шовного материала ловушкой осуществляется удаление ловушки с хирургическим шовным материалом. Ловушка может удаляться одним из ряда способов. Например, может удаляться все устройство манипулирования хирургическим шовным материалом, к которому неподвижно прикреплена ловушка. В качестве другого примера, ловушка (вместе с остальной частью устройства манипулирования хирургическим шовным материалом) может отводиться с использованием определенного управления. Это управление может быть ручным (например, с нажатием кнопки на ручке устройства манипулирования хирургическим шовным материалом) или автоматическим (например, ловушка втягивается через одну секунду после закрепления хирургического шовного материала). Также это управление может располагаться на устройстве манипулирования хирургическим шовным материалом (например, на ручке устройства манипулирования хирургическим шовным материалом) или выполняться на удалении от устройства манипулирования хирургическим шовным материалом (например, дистанционное управление). После удаления ловушки с хирургическим шовным материалом процесс завершается.
На Фиг.3A-3D показано устройство манипулирования хирургическим шовным материалом с возможностью извлечения этого хирургического шовного материала согласно одному или большему количеству вариантов реализации настоящего изобретения. На Фиг.3A показано поперечное сечение устройства манипулирования хирургическим шовным материалом с возможностью извлечения этого хирургического шовного материала, которое включает корпус (302) с полостью (314), используемой для помещения в нее толкателя (304), и иглу (306) с каналом (308), приспособленным для прохождения через него хирургического шовного материала (310). Ловушка (312) прикреплена к дальнему концу толкателя (304). Ниже приводится описание каждого из этих компонентов. Варианты реализации настоящего изобретения не ограничиваются конфигурацией, показанной на Фиг.3A и 3B и здесь обсуждаемой.
Согласно одному или большему количеству вариантов реализации настоящего изобретения хирургический шовный материал (310) удерживается на месте в канале (308) иглы (306) толкателем (304), когда данный толкатель (304) перемещается по направлению к дистальному концу и контактирует с хирургическим шовным материалом (310). Хирургический шовный материал (310) может также удерживаться на месте в канале (308) иглы (306) с использованием одного или большего количества других средств, которые не включают использование толкателя (304). Например, хирургический шовный материал (310) может удерживаться на месте трением, когда размер канала (308) слегка превышает размер хирургического шовного материала (310), или когда через иглу (306) проходит дополнительный хирургический шовный материал (310) таким образом, что когда игла (306) проходит через ткань, оба конца хирургического шовного материала (310) проходят иглу (306) и движутся по направлению к ближнему концу устройства манипулирования хирургическим шовным материалом. В качестве другого примера, устройство манипулирования хирургическим шовным материалом может включать убираемый паз (например, стопорный зажим), встроенный в корпус (302) на дистальном конце, выдвигающийся в канал (308) для удержания хирургического шовного материала (310) на одном месте в канале (308). Хирургический шовный материал (310) может удерживаться на одном месте перед тем и в то время как устройство манипулирования хирургическим шовным материалом вводится в ткань и проходит через нее в начале наложения шва. Кроме освобождения из канала (308) в игле (306), хирургический шовный материал (310) может также быть внешним для устройства манипулирования хирургическим шовным материалом в некоторых вариантах реализации настоящего изобретения.
Согласно одному или большему количеству вариантов реализации настоящего изобретения игла (306) используется для проникновения в ткань. Игла может быть любой длины и/или формы, и может быть изготовлена из любого материала, предназначенного для проникновения в ткань, и подобного материала таким образом, чтобы хирургический шовный материал (310) мог через нее вводиться. Примеры формы иглы (306) включают прямую, 1/4 окружности, 3/8 окружности, 1/2 окружности, 5/8 окружности, составную кривую, полуизогнутую (также известную как лыжа), и полуизогнутую на обоих концах прямого сегмента (также известную как каноэ), но не ограничиваются этими формами. Иглу (306) также можно классифицировать на основе геометрии ее острия. Примеры классификаций иглы (306) включают коническую, режущую, обратную режущую, коническую режущую, с тупым острием и лопаточным острием, но не ограничиваются этим. Далее, согласно одному или большему количеству вариантов реализации настоящего изобретения, диаметр иглы (306) (также как по меньшей мере и части корпуса (302), проникающей в ткань, и другого подобного материала) приблизительно такой же или слегка превышает диаметр хирургического шовного материала (310).
Согласно одному или большему количеству вариантов реализации настоящего изобретения толкатель (304) может перемещаться по направлению к дистальному концу и/или проксиальному концу устройства манипулирования хирургическим шовным материалом вручную (например, путем подачи и/или втягивания части толкателя (304), выступающей за проксиальный конец корпуса (302)), с использованием механического управления, пневматического управления, или с использованием другого способа. Управление, используемое для контролирования положения толкателя (304) внутри полости (314) корпуса (302), может располагаться на проксиальном конце корпуса (302) (как на ручке), осуществляться с использованием устройства дистанционного управления, или с использованием некоторых других соответствующих средств управления. Согласно одному или большему количеству вариантов реализации настоящего изобретения толкатель (304), так же как полость (314) корпуса (302), в которой толкатель (304) постоянно находится, имеет круглую форму. В таком случае толкатель (304) может перемещаться внутри полости (314) корпуса (302) продольно и/или вращательно. Полость (314) может профилироваться таким образом, чтобы позволять толкателю (304) перемещаться внутри полости (314) с целью удержания хирургического шовного материала (310) на месте, и/или для манипулирования ловушкой (312) с целью захвата хирургического шовного материала (310).
Согласно одному или большему количеству вариантов реализации настоящего изобретения, когда толкатель (304) расположен у дистального конца корпуса (302) устройства манипулирования хирургическим шовным материалом, ловушка (312) проходит через канал (308) в игле (306) таким образом, что остаток ловушки (312) (то есть, часть ловушки (312), используемая для захвата хирургического шовного материала) располагается вне данного устройства манипулирования хирургическим шовным материалом. Основание ловушки (312) может быть прикреплено к концу толкателя (304) на дистальном конце. В таком случае основание ловушки (312) может быть прикреплено к любой части конца толкателя (304), включая часть, смещенную от центра, находящуюся в конце толкателя (304). Ловушка (312) может иметь одну из ряда форм, включая, например, замкнутую петлю и крючок, но не ограничиваться ими.
Ловушка (312) может быть выполнена из одного или большего числа различных материалов, обладающих одним или большим количеством различных свойств. Например, ловушка (312) может быть выполнена из нитинола, гибкого металла, пластика и/или из другого подходящего материала. Ловушка (312) может иметь одинаковую или переменную толщину по длине ловушки (312). Далее, различные части ловушки (312) могут выполняться из различного материала. Например, основание ловушки (312), прикрепленное к концу толкателя (304), может быть выполнено из нейлона, в то время остальная часть ловушки (312) может быть выполнена из гибкого металла. Ловушка (312) может иметь соответствующий размер такой, чтобы ловушка (312) и хирургический шовный материал (310) могли в то же самое время соответствовать каналу (308).
Согласно одному или большему количеству вариантов реализации настоящего изобретения, корпус (302), толкатель (304), и игла (306) могут быть выполнены из одного или большего числа различных материалов, обладающих одним или большим количеством различных свойств. Например, корпус (312) может быть выполнен из нержавеющей стали, толкатель (304) может быть выполнен из пластика, и игла (306) может быть выполнена из титана. Корпус (302) может иметь изменяющиеся контуры и/или характеристики по своей длине. Например, по направлению к проксимальному концу корпуса (302) ручка может быть оконтурена, и/или выполнена, или покрыта материалом (например, резиной) для улучшения охвата и способствования ручному управлению с использованием устройства манипулирования хирургическим шовным материалом с возможностью извлечения этого хирургического шовного материала. Корпус (302) может также включать одно или большее количество устройств управления (например, кнопка, ручка) для осуществления функций манипулирования хирургическим шовным материалом.
На Фиг.3B показан вариант использования устройства манипулирования хирургическим шовным материалом с возможностью извлечения этого хирургического шовного материала так, как описывалось выше применительно к Фиг.3A. Конкретнее, когда устройство манипулирования хирургическим шовным материалом с возможностью извлечения этого хирургического шовного материала вводится в ткань, хирургический шовный материал (330) может удерживаться путем отвода, а не полного введения толкателя (324) в полость (334) корпуса (322). Другими словами, вместо использования усилия толкателя (324) к хирургическому шовному материалу (330) в канале (328) для удержания этого хирургического шовного материала (330) на месте, как описано выше применительно к Фиг.3A, хирургический шовный материал (330) может удерживаться на месте путем отвода толкателя (324) в полости (334) до положения, в котором ловушка (332), прикрепленная к концу толкателя (324), будет находиться в полностью выдвинутом состоянии. Следовательно, усилие ловушки (332), извлекающее хирургический шовный материал (330) по направлению к полости (334) (то есть, по направлению к проксимальному концу), может удерживать хирургический шовный материал (330) на месте в канале (328) иглы (326). Когда хирургический шовный материал (330) должен быть освобожден для извлечения и завершения наложения шва, толкатель (324) перемещается по направлению к дистальному концу таким образом, чтобы ловушка (332) ослабилась и больше не прикладывала усилие к хирургическому шовному материалу (330). Хирургический шовный материал (330) может быть удален из канала (328) одним из ряда способов. Например, устройство манипулирования хирургическим шовным материалом может передвигаться, в то время как хирургический шовный материал (330) будет находиться в неподвижном состоянии. Вследствие этого хирургический шовный материал (330) может выходить из канала (328).
На Фиг.3C показан вид устройства манипулирования хирургическим шовным материалом с возможностью извлечения этого хирургического шовного материала по Фиг.3A и 3B согласно одному или большему количеству вариантов реализации настоящего изобретения. В этом случае хирургический шовный материал (не показан) освобождается из канала (348) в корпусе (342) иглы. Здесь ловушка (352) размещается с использованием толкателя (344) для выполнения захвата хирургического шовного материала с целью его извлечения. На Фиг.4A-4D, описанных ниже, показано, как ловушка может использоваться для захвата хирургического шовного материала с целью его извлечения согласно одному или большему количеству вариантов реализации настоящего изобретения.
На Фиг.3D показан один или большее количество вариантов реализации настоящего изобретения, в которых устройство манипулирования хирургическим шовным материалом (372) содержит расположенную на дистальном конце пустотелую иглу с тупым концом (376). Тупой конец (376) в устройстве манипулирования хирургическим шовным материалом (372) может быть разрезным (например, уплощенной трубчатой формы, как показано на Фиг.3D), или иметь некоторую другую форму с острым проникающим в ткань дистальным концом. Ловушка (374) на этом Фиг.3D выдвигается из тупого конца (376), а не из располагающегося сбоку отверстия иглы, как уже описывалось выше применительно к Фиг.3A-3C. Ловушка (374) может выдвигаться из тупого конца (376) устройства манипулирования хирургическим шовным материалом (372) при захвате хирургического шовного материала (не показано). После осуществления захвата хирургического шовного материала ловушка (374) может быть выровнена (например, чтобы войти в отверстие на тупом конце (376)) и быть втянутой в устройство манипулирования хирургическим шовным материалом (374). Ловушкой (374) можно управлять (например, извлекать, выдвигать, поворачивать) с использованием толкателя (не показан) или другого способа управления.
Представленный на Фиг.4A-4D толкатель (не показан), к концу которого прикреплена ловушка (например, 402, 412, 422, 432), поворачивается таким образом, что ловушка (например, 402, 412, 422, 432) поворачивается вокруг корпуса (например, 404, 414, 424, 434) устройства манипулирования хирургическим шовным материалом с возможностью извлечения этого хирургического шовного материала. Ловушка (например, 404, 414, 424, 434) может поворачиваться на основании ловушки (например, 404, 414, 424, 434) так, как показано на Фиг.4A-4D. Ловушка (например, 404, 414, 424, 434) может также поворачиваться с использованием одного или более других типов вращения, как уже описывалось выше применительно к Фиг.2A. Размер ловушки (например, 402, 412, 422, 432) может уменьшаться путем отвода толкателя по направлению к проксимальному концу устройства манипулирования хирургическим шовным материалом. Наоборот, размер ловушки (например, 402, 412, 422, 432) может увеличиваться вытягиванием толкателя по направлению к дистальному концу. Далее, образуемый ловушкой (например, 402, 412, 422, 432) угол к устройству манипулирования хирургическим шовным материалом (в данном примере примерно 30°) может контролироваться для улучшения захвата хирургического шовного материала. Например, для уменьшения этого угла из ткани и хирургического шовного материала может быть извлечено все устройство манипулирования хирургическим шовным материалом. Наоборот, все устройство манипулирования хирургическим шовным материалом может выдвигаться по направлению к ткани и хирургическому шовному материалу для увеличения данного угла. Образуемый ловушкой (например, 402, 412, 422, 432) угол к устройству манипулирования хирургическим шовным материалом может также контролироваться с использованием ряда других способов, включая, использование рычага, прикрепленного к концу толкателя и основанию ловушки, а также приспособленной для проталкивания и/или вытягивания ловушки. Поворот ловушки (например, 402, 412, 422, 432) может быть остановлен вручную (например, переключением выключателя, прекращающего ручное выполнение операции поворота ловушки) или после появления некоторого события (например, истечения времени, захвата хирургического шовного материала).
На Фиг.5 показан хирургический шовный материал (502), который захвачен и закреплен ловушкой (504) согласно одному или большему количеству вариантов реализации настоящего изобретения. В этом случае толкатель (506) отводится по направлению к проксимальному концу устройства манипулирования хирургическим шовным материалом до точки, в которой ловушка (504) находится в натянутом состоянии. Хирургический шовный материал (502) прижимается ловушкой (504) к корпусу (508). Таким образом, когда толкатель (506) остается в таком же положении (то есть, когда ловушка находится в натянутом состоянии), устройство манипулирования хирургическим шовным материалом может извлекаться вместе с хирургическим шовным материалом (502). Толкатель (506) может оставаться на месте с использованием механизма блокировки (не показан). Например, ручка (не показана) устройства манипулирования хирургическим шовным материалом может включать кнопку, блокирующую толкатель (506) на месте.
На Фиг.6A-6D показано устройство манипулирования хирургическим шовным материалом с возможностью извлечения этого хирургического шовного материала согласно одному или большему количеству вариантов реализации настоящего изобретения. В этом случае ловушка (например, 602, 612, 622, 632) представляет собой крючок. Крючок может быть выполнен из тонкой проволоки, пластика, некоторых других подходящих материалов или любого их сочетания. Форма и размер ловушки (например, 602, 612, 622, 632) могут быть различными. В этом случае форма ловушки (например, 602, 612, 622, 632) включает дугу 180° на дистальном конце, а также изгиб ловушки поблизости от дуги 180°, где продольное расстояние, покрываемое изгибом, равно диаметру дуги 180°. Другими словами, конец дуги 180° перед изгибом находится на одной линии с основанием ловушки. Согласно одному или большему количеству вариантов реализации настоящего изобретения диаметр дуги 180° слегка превышает диаметр хирургического шовного материала (не показан).
Согласно одному или большему количеству вариантов реализации настоящего изобретения ловушка (например, 602, 612, 622, 632) выдвигается из щелевого паза (например, 604, 614, 624, 634) и убирается в него. Как описано выше, размер и конфигурация щелевого паза (например, 604, 14, 624, 634) может определяться таким образом, чтобы вмещать ловушку (например, 602, 612, 622, 632) только тогда, когда ловушка определенным образом ориентирована. Согласно одному или большему количеству вариантов реализации настоящего изобретения щелевой паз (например, 604, 614, 624, 634) выступает из корпуса на дистальном конце или возле дистального конца устройства манипулирования хирургическим шовным материалом. Толкатель может быть приспособлен, когда он полностью выдвинут внутри устройства манипулирования хирургическим шовным материалом, для выдвижения ловушки (например, 602, 612, 622, 632) через щелевой паз (например, 604, 614, 624, 634) корпуса с целью манипулирования ловушкой (например, 602, 612, 622, 632) для захвата хирургического шовного материала.
Как и в случае с ловушкой, описанной выше применительно к Фиг.3A-5, ловушка (например, 602, 612, 622, 632) согласно Фиг.6A-6D может поворачиваться независимо от движения устройства манипулирования хирургическим шовным материалом. В этом случае ловушка (например, 602, 612, 622, 632) поворачивается на относительно постоянный угол относительно оси, перпендикулярной к устройству манипулирования хирургическим шовным материалом и выходящей из основания ловушки (например, 602, 612, 622, 632). Такой угол может изменяться путем перемещения ловушки (например, 602, 612, 622, 632) на периферии или по центральной линии щелевого паза (например, 604, 614, 624, 634). Согласно одному или большему количеству вариантов реализации настоящего изобретения естественное состояние ловушки (например, 602, 612, 622, 632) - изогнутое. В таком случае отвод ловушки (например, 602, 612, 622, 632) может уменьшать величину изгиба данной ловушки (например, 602, 612, 622, 632). Ловушка (например, 602, 612, 622, 632) может поворачиваться на основе выполнения ручной команды (например, пользователь поворачивает рукоятку на ручке устройства манипулирования хирургическим шовным материалом), механической команды (например, включение выключателя на устройстве дистанционного управления), использования некоторых других подходящих способов или любого их сочетания. Поворот ловушки (например, 602, 612, 622, 632) может быть остановлен вручную (например, переключением выключателя, прекращающего ручное выполнение операции поворота ловушки) или после появления некоторого события (например, истечения времени, захвата хирургического шовного материала).
Как показано на Фиг.7A-7D согласно одному или большему количеству вариантов реализации настоящего изобретения, когда ловушка (например, 702, 712, 722, 732) представляет собой крючок или имеет другую форму с полугибкой структурой, в которой могут отличаться ширина и высота, может использоваться щелевой паз (например, 704, 714, 724, 734) с такими же (или немного большими) шириной и высотой. Щелевой паз (например, 704, 714, 724, 734) может служить местом для ловушки (например, 702, 712, 722, 732) в случае, когда устройство манипулирования хирургическим шовным материалом обеспечивает прохождение хирургического шовного материала (не показан) через ткань (не показана). Щелевой паз (например, 704, 714, 724, 734) может быть сконфигурирован для включения острого конца (например, 706, 716, 726, 736), используемого для прокалывания ткани и облегчения прохождения устройства манипулирования хирургическим шовным материалом через ткань. Как описано выше, щелевой паз (например, 704, 714, 724, 734), когда он не расположен возле конца иглы, может не иметь острого конца (например, 706, 716, 726, 736). В таком случае щелевой паз (например, 704, 714, 724, 734) может располагаться на любой внешней поверхности устройства манипулирования хирургическим шовным материалом.
Как показано на Фиг.7A, ловушка (например, 702, 712, 722, 732) может полностью втянута в щелевой паз (например, 704, 714, 724, 734), если ловушка (например, 702, 712, 722, 732) не закрепляет хирургический шовный материал. При упрятывании ловушки (например, 702, 712, 722, 732) во время прохождения хирургического шовного материала через ткань, последняя может меньше травмироваться, так как устройство манипулирования хирургическим шовным материалом имеет относительно меньший профиль. Согласно одному или большему количеству вариантов реализации настоящего изобретения, после того, как устройство манипулирования хирургическим шовным материалом пропускает этот хирургический шовный материал (не показан) через ткань (не показана), ловушка (например, 702, 712, 722, 732) выдвигается из щелевого паза (например, 704, 714, 724, 734) так, как показано на Фиг.7B. Когда ловушка (например, 702, 712, 722, 732) выдвинута, то ловушку (например, 702, 712, 722, 732) можно поворачивать так, как описано выше применительно к Фиг.6A-6D, для облегчения захвата хирургического шовного материала.
Далее, когда хирургический шовный материал захвачен ловушкой (например, 702, 712, 722, 732), ловушка (например, 702, 712, 722, 732) может убираться в щелевой паз (например, 704, 714, 724, 734) так, как показано на Фиг.7C и 7D. Из-за размеров щелевого паза (например, 704, 714, 724, 734) отвод ловушки (например, 702, 712, 722, 732) в щелевой паз (например, 704, 714, 724, 734) может происходить только в случае, если ловушка (например, 702, 712, 722, 732) должным образом ориентирована относительно щелевого паза (например, 704, 714, 724, 734). Далее, как показано на Фиг.7D, когда ловушка (например, 702, 712, 722, 732) отводится в щелевой паз (например, 704, 714, 724, 734), ловушка (например, 702, 712, 722, 732) может слегка выступать за пределы щелевого паза (например, 704, 714, 724, 734). Ловушка (например, 702, 712, 722, 732) может выступать, так как хирургический шовный материал (не показан) при закреплении ловушкой (например, 702, 712, 722, 732) может заклиниваться между стенками щелевого паза (например, 704, 714, 724, 734) и ловушкой (например, 702, 712, 722, 732), предотвращая полный отвод ловушки (например, 702, 712, 722, 732). Другими словами, при закреплении хирургического шовного материала ловушкой (например, 702, 712, 722, 732) ловушка (например, 702, 712, 722, 732) может в основном отводиться так, как показано на Фиг.7D, а не полностью втягиваться.
На Фиг.8 показано устройство манипулирования хирургическим шовным материалом с возможностью извлечения этого хирургического шовного материала согласно одному или большему количеству вариантов реализации настоящего изобретения. Устройство манипулирования хирургическим шовным материалом на Фиг.8 включает иглу (802), которая может быть изогнута на дистальном конце (804), наконечник (806) с проникающим острием, а также средства удержания и освобождения хирургического шовного материала (не показаны) после прохождения данного хирургического шовного материала. В этом случае к средствам проведения хирургического шовного материала относится паз (808) в наконечнике (806), достаточно большой для обеспечения прохождения хирургического шовного материала. Наконечник (806) может включать механизм (например, ролики, втягиваемый и гибкий толкатель в канале внутри иглы (802), стопорный зажим с механическим приводом внутри паза (808)), позволяющий пользователю осуществлять закрепление и/или освобождение хирургического шовного материала.
Устройство манипулирования хирургическим шовным материалом может также включать извлекатель хирургического шовного материала (810). Согласно одному или большему количеству вариантов реализации настоящего изобретения ловушка (812), расположенная на дистальном конце извлекателя хирургического шовного материала (810), приспособлена для закрепления ткани в дополнение к извлечению хирургического шовного материала. Ловушка (812) извлекателя хирургического шовного материала (810) может закреплять ткань путем зажима данной ткани, предоставления подпорки, на которой может располагаться ткань, обеспечения поддержки данной ткани с использованием некоторых других соответствующих способов закрепления ткани, или с использованием любого сочетания указанных способов. Согласно одному или большему количеству вариантов реализации настоящего изобретения ловушка (812) извлекателя хирургического шовного материала (810) может закреплять ткань таким образом, что игла (802) может прокалывать ткань без смещения данной ткани при проникновении иглы (802).
Как показано на Фиг.8, извлекатель хирургического шовного материала (810) представляет собой два параллельных стержня, а ловушка (812) извлекателя хирургического шовного материала (810) представляет собой полукруглую петлю, соединяющую два стержня и изогнутую на некоторый угол, примерно перпендикулярный игле (802), когда данная игла (802) заканчивает прохождение через ткань. В этом случае ловушка (812) изогнута относительно двух параллельных стержней извлекателя хирургического шовного материала (810) таким образом, что образованный между ловушкой (812) и иглой (802) угол, когда данная игла (802) перекрывает ловушку (812), равен примерно 110°, и таким образом облегчается прохождение ткани. В общем, варианты реализации настоящего изобретения могут конфигурироваться так, что угол между ловушкой (812) и иглой (802) может изменяться. Например, ловушка (812) и/или игла (812) могут регулироваться для изменения угла между ловушкой (812) и иглой (812). Угол между ловушкой (812) и иглой (812) может находиться в диапазоне от немного больше 0° до 180°.
В соответствии с конфигурацией, показанной на Фиг.8, ловушка (812) извлекателя хирургического шовного материала (810) приспосабливается для закрепления верхней и/или нижней стороны ткани при проникновении в данную ткань иглы (802). Далее, ловушка (812) извлекателя хирургического шовного материала (810) может быть сконфигурирована для захвата и/или закрепления хирургического шовного материала. Например, ловушка (812) может быть сформирована конической так, что хирургический шовный материал будет заклиниваться в ловушке (812). В качестве другого примера, ловушка (812) может включать механизм фиксации, позволяющий хирургическому шовному материалу проходить по направлению к петле ловушки (812) и оставаться закрепленным до освобождения механизма фиксации пользователем или автоматически (например, когда устройство манипулирования хирургическим шовным материалом удаляется на определенное расстояние от ткани).
Игла (802) может быть прикреплена проксимальным концом к корпусу (не показан) и/или ручке (не показана) устройства манипулирования хирургическим шовным материалом. Согласно одному или большему количеству вариантов реализации настоящего изобретения игла (802) может выдвигаться и убираться относительно извлекателя хирургического шовного материала (810). Другими словами, когда извлекатель хирургического шовного материала (810) удерживается на месте за тканью, игла (802) с хирургическим шовным материалом может выдвигаться на дистальном конце для проникания в ткань. Далее, игла (802) может выдвигаться за ловушку (812) извлекателя хирургического шовного материала (810). Конкретнее, по мере того, как дистальный конец (например, (806), (808)) иглы (802) перемещается за ловушку (812) извлекателя хирургического шовного материала (810), дистальный конец (например, (806), (808)) иглы (802) (включая хирургический шовный материал) проходит между двумя стержнями и над полукруглой петлей, соединяющей два стержня ловушки (812) извлекателя хирургического шовного материала (810). Когда игла (802) достаточно продвинулась через ткань, хирургический шовный материал может быть освобожден (как описано выше), и игла (802) может отводиться через ткань без некоторого или всего хирургического шовного материала. В качестве альтернативы, хирургический шовный материал может проходить за ловушку (812), но не освобождаться. Игла тогда может извлекаться из ткани вслед за извлекателем хирургического шовного материала (810). Извлекатель хирургического шовного материала (810), когда он отводится, может захватывать и закреплять хирургический шовный материал, свернутый за ловушкой (812). Согласно одному или большему количеству вариантов реализации настоящего изобретения хирургический шовный материал захватывается ловушкой (812) тогда, когда он освобождается из иглы (802).
В продолжение описания Фиг.8: когда хирургический шовный материал освобождается из иглы (802), то извлекатель хирургического шовного материала (810) может извлекать данный хирургический шовный материал. Согласно одному или большему количеству вариантов реализации настоящего изобретения извлекатель хирургического шовного материала (810) может не извлекать хирургический шовный материал до тех пор, пока игла (802) не выведена из ткани. Хирургический шовный материал может извлекаться с использованием извлекателя хирургического шовного материала (810) и применением ручного и/или автоматического процесса. Ручной процесс извлечения хирургического шовного материала может включать действия пользователя. Например, пользователь может вручную извлекать хирургический шовный материал путем отвода иглы (802), подъема устройства манипулирования хирургическим шовным материалом (и, следовательно, извлекателя хирургического шовного материала (810)) вверх и из ткани таким образом, чтобы хирургический шовный материал захватывался и закреплялся ловушкой (812) извлекателя хирургического шовного материала (810), и удаления устройства манипулирования хирургическим шовным материалом (и, таким образом, хирургического шовного материала). Некоторые или все операции данного процесса могут также выполняться автоматически с использованием одного или большего количества органов управления.
Согласно одному или большему количеству вариантов реализации настоящего изобретения игла (802) и извлекатель хирургического шовного материала (810) (или их части) устройства манипулирования хирургическим шовным материалом могут поворачиваться независимо. Игла (802) и извлекатель хирургического шовного материала (810) (или их части) также могут поворачиваться совместно. Далее, игла (802) и/или извлекатель хирургического шовного материала (810) (или их части) могут снабжаться ключами, как описано выше, для содействия ориентации иглы (802) и/или извлекателя хирургического шовного материала (810) (или их части) при выдвижении и/или отводе иглы (802) и/или извлекателя хирургического шовного материала (810) (или их части).
В приводимом ниже описании (вместе с Фиг.2A-8) представлен ряд примеров согласно одному или большему количеству вариантов реализации настоящего изобретения. Эти примеры предназначены только для пояснения и они не должны ограничивать объем настоящего изобретения. Используемая на Фиг.2A-8 терминология может использоваться в данных примерах без последующей ссылки на Фиг.2A-8.
Пример 1
Рассмотрим следующий пример, показанный на Фиг.9A-10B, который описывает использование одного устройства манипулирования хирургическим шовным материалом для прохождения хирургического шовного материала и извлечения хирургического шовного материала в соответствии с одним или большим количеством описанных выше вариантов реализации настоящего изобретения, в частности так, как описано выше применительно к Фиг.2A и Фиг.6A-7D. В данном примере, как показано на Фиг.9A, рассмотрен сценарий, согласно которому хирургический шовный материал (902) прикрепляется к игле (904) устройства манипулирования хирургическим шовным материалом ловушкой (906). Здесь игла (904) имеет сквозное острие (910) на дистальном конце для проникновения в ткань. Проксимальный конец иглы (904) соединен с корпусом (912) устройства манипулирования хирургическим шовным материалом. Ловушка (908) в данном примере представляет собой крючок и отводится в канал (не показан), проходящий внутри длины иглы (904) через охватывающий корпус (908) и расположенный со стороны иглы (904) ниже дистального конца, чтобы закрепить хирургический шовный материал (902). Охватывающий корпус (908) может быть сконфигурирован для разрешения ловушке (906) слегка, если сколько-нибудь, выступать за пределы стенок иглы (904), когда ловушка (906) полностью втянута.
Ловушка (906) и/или охватывающий корпус (908) со стороне иглы (904) могут быть сконфигурированы одним из ряда способов для расположения ловушки (906) заподлицо или почти заподлицо с внешней стороной иглы (904), когда ловушка (906) полностью втянута. Пример того, как ловушка (906) и охватывающий корпус (908) могут быть сконфигурированы согласно одному или большему количеству вариантов реализации настоящего изобретения, показан на Фиг.10A и 10B. Конкретнее, на Фиг.10A ловушка (1014) сконфигурирована как крючок (1004) на дистальном конце и включает ключ (1002), располагающийся вблизи крючка (1004). Ключ (1002) может быть частью ловушки (1014) и создаваться изгибом ловушки на каждой стороне ключа (1002). Ключ (1002) может быть любой длины. Например, как показано на Фиг.10A, длина ключа (1002) может быть примерно равна длине отверстия (1016) канала (1008) в боковой стороне иглы (1012). В другом примере длина ключа (1002) может быть меньше длины отверстия (1016) канала (1008) в боковой стороне иглы (1012). Ключ (1002) может использоваться для закрепления ловушки (1014), когда ловушка (1014) находится во втянутом положении. Ключ (1002) может также использоваться для того, чтобы ловушка (1014) была правильно сориентирована (например, чтобы отверстие в крючке (1004) на дальнем конце ловушки (1014) выходило на охватывающий корпус (1006) иглы (1012)) при втягивании ловушки.
Поперечное сечение ключа показано на Фиг.10B. Конкретнее, показано, что игла (1030) закрывает канал (1032), который в свою очередь закрывает большую часть ловушки. Ключ (1034) ловушки, расположенный возле отверстия канала (1032) на боковой стороне иглы (1030), отделяет ближнюю к ключу (1034) часть ловушки внутри канала (1032), и дальнюю к ключу (1034) часть ловушки вне канала (1032) и иглу (1030). Когда ловушка отводится внутрь канала (1032) по направлению к проксимальному концу иглы, ключ (1034) способствует закреплению ловушки во втянутом (отведенном) положении. Как видно на Фиг.10B, часть крючка (1036) может слегка выступать из наружного края иглы (1030). Согласно одному или большему количеству вариантов реализации настоящего изобретения ключ предотвращает вращательное перемещение ловушки, позволяя в то же время выполнять переходы (например, выдвижение, отвод) ловушки.
В продолжение описание Фиг.10A: игла (1012) дополнительно сконфигурирована с включением охватывающего корпуса (1006). Конкретнее, охватывающий корпус (1006) может иметь форму, соответствующую крючку (1004) ловушки (1014), так что когда ловушка (1014) полностью отведена (втянута), крючок (1004) располагается внутри охватывающего корпуса (1006) таким образом, что лишь маленькая часть выступает или ни одна часть крючка (1004) не выступает за периметр иглы (1012). Согласно одному или большему количеству вариантов реализации настоящего изобретения, чем ближе ключ располагается к крючку (1004), тем более эффективно данный ключ (1004) работает в отношении правильного ориентирования (например, обеспечения расположения крючка (1004) внутри охватывающего корпуса (1006)) крючка (1004) тогда, когда крючок (1004) отведен. Согласно одному или большему количеству вариантов реализации настоящего изобретения охватывающий корпус (1006) может ограничивать величину отвода крючка (1004) так, чтобы хирургический шовный материал захватывался между крючком (1004) и иглой (1012), и мог скользить с минимальным трением.
Для продолжения описания Примера 1, на Фиг.9B показано устройство манипулирования хирургическим шовным материалом после его проникновения в ткань (920). Проникающее острие (910) иглы (904) используется для прокалывания ткани (920) и создания отверстия, через которое может проходить остальная часть иглы (904). Далее, хирургический шовный материал (902) остается закрепленным, когда игла (904) проходит через ткань (920), так как ловушка (906) остается отведенной. Следовательно, хирургический шовный материал будет проходить через ткань вместе с иглой (904) и ловушкой (906).
На Фиг.9C, ловушка (906) выдвинута из охватывающего корпуса (908) и иглы (904). Ловушка (906) может выдвигаться с использованием определенного управления (ручного или автоматического) устройством. Затем ловушка (906) может поворачиваться во время выдвижения ловушки (906) и/или после выдвижения ловушки (906). Ловушка (906) может поворачиваться на один или больше полных оборотов или на часть оборота. Ловушка (906) может поворачиваться по часовой стрелке или против часовой стрелки. Пользователь может управлять одним или более вращательным перемещением ловушки (906), и/или данные вращательные перемещения могут происходить автоматически после начала выдвижения ловушки (906). После выдвижения ловушки (906) хирургический шовный материал (902) освобождается от ловушки (906).
На Фиг.9D, ловушка (906) отводится без хирургического шовного материала (902). Когда ловушка (906) отводится, устройство манипулирования хирургическим шовным материалом удаляется путем отвода назад через ткань (920). Когда устройство манипулирования хирургическим шовным материалом удаляется из ткани (920), хирургический шовный материал (902) остается продетым через ткань (920).
На Фиг.9E устройство манипулирования хирургическим шовным материалом переводится в другое место. Конкретнее, игла (904) может проникать в ткань (920) в месте по соседству с местом в ткани (920), где произошло предыдущее в нее проникновение. В качестве альтернативы, игла (904) может проникать в различные ткани (не показаны), расположенные рядом с данной тканью (920). В качестве другой альтернативы, игла (904) может располагаться в таком месте, что не сможет проникнуть ни в какую ткань (например, ткань (920)), но которое будет находиться вблизи от хирургического шовного материала (902), ожидающего извлечения. Когда игла (904) проникает в ткань (например, ткань (920)) или располагается вблизи от ткани (920), ловушка (906) может оставаться отведенной. Согласно одному или большему количеству вариантов реализации настоящего изобретения игла (904) выдвигается до такой точки, чтобы ловушка (906), когда она выдвинута, могла извлекать хирургический шовный материал (902).
На Фиг.9F ловушка (906) выдвинута из охватывающего корпуса (908) и иглы (904). В этом случае ловушка (906) выдвинута и поворачивается для захвата хирургического шовного материала (902). Когда хирургический шовный материал (902) захвачен ловушкой (906), ловушка (906) отводится. Когда ловушка (906) отводится в охватывающий корпус (908), хирургический шовный материал (902) закрепляется. В качестве альтернативы, ловушка (906) может оставаться выдвинутой (как показано на Фиг.9F) относительно охватывающего корпуса (908).
На Фиг.9G после закрепления хирургического шовного материала (902) удаляется игла (904). В одном или большем количестве вариантов реализации настоящего изобретения при удалении иглы (904) накладывается шов хирургическим шовным материалом (902). Затем может быть отведено все устройство манипулирования хирургическим шовным материалом с извлечением хирургического шовного материала (902) вместе с устройством манипулирования хирургическим шовным материалом. Когда устройство манипулирования хирургическим шовным материалом удаляется, ловушка (906) может оставаться выдвинутой, как показано на Фиг.9G. В качестве альтернативы, ловушка (906) может отводиться при удалении устройства манипулирования хирургическим шовным материалом.
Пример 2
Рассмотрим следующий пример, показанный на Фиг.11A-11H, в котором описывается извлечение хирургического шовного материала с использованием устройства манипулирования хирургическим шовным материалом в соответствии с одним или большим количеством описанных выше вариантов реализации настоящего изобретения, в частности так, как было описано выше применительно к Фиг.2A и Фиг.6A-7D. В данном примере рассмотрим сценарий, в котором хирургический шовный материал (1102) вводится в ткань (1104) так, как показано на Фиг.11A. Хирургический шовный материал (1102) извлекается для образования шва. Для извлечения хирургического шовного материала (1102) согласно одному или большему количеству вариантов реализации настоящего изобретения используется устройство извлечения хирургического шовного материала (1106). Как показано на Фиг.11B, игла (1110) устройства извлечения хирургического шовного материала (1106) вводится в ткань (1104) в области, расположенной вблизи от желаемого расположения шва.
Когда игла (1110) устройства извлечения хирургического шовного материала (1106) достаточно далеко проходит через ткань (1104), ловушка (1108) выдвигается из устройства извлечения хирургического шовного материала (1106) так, как показано на Фиг.11C. В данном примере, ловушка (1108) выступает возле проксимального конца, но не иглы, а устройства извлечения хирургического шовного материала (1106). При этом ловушка (1108), используемая в данном примере, имеет форму крючка. В данном примере для ловушки (1108) может использоваться щелевое отверстие (не показано).
Когда ловушка (1108) выдвигается из устройства извлечения хирургического шовного материала (1106), ловушка (1108) поворачивается с целью захвата хирургического шовного материала (1102) так, как показано на Фиг.11D-11F. В данном примере ловушка (1108) поворачивается по часовой стрелке, если смотреть со стороны пользователя. Другими словами, ловушка (1108) проталкивается в направлении открывания крючка таким образом, что крючок может захватить хирургический шовный материал (1102).
Когда поворот ловушки (1108) приводит к захвату хирургического шовного материала (1102), ловушка (1108) отводится в устройство извлечения хирургического шовного материала (1106) так, как показано на Фиг.11G. Когда ловушка (1108) отводится, она перемещает хирургический шовный материал (1102) по направлению к устройству извлечения хирургического шовного материала (1106). Когда ловушка (1108) полностью отведена, хирургический шовный материал (1102) закрепляется устройством извлечения хирургического шовного материала (1106).
Как показано на Фиг.11H, устройство извлечения хирургического шовного материала (1106) вместе с хирургическим шовным материалом (1102) затем отводится через ткань (1104). Когда устройство извлечения хирургического шовного материала (1106) полностью удаляется из ткани (1104), завершается наложение шва.
Пример 3
Рассмотрим следующий пример, показанный на Фиг.12A-12D, в котором описывается извлечение хирургического шовного материала с использованием устройства манипулирования хирургическим шовным материалом в соответствии с одним или большим количеством описанных выше вариантов реализации настоящего изобретения, в частности так, как было описано выше применительно к Фиг.2B и 8. Рассмотрим сценарий, в котором выполняется шов с использованием хирургического шовного материала (1212), проходящего через ткань (1206), требующую поддержки для ее удержания на месте. Первоначально, на Фиг.12A, ткань (1206) удерживается с использованием ловушки (1210), расположенной на дистальном конце извлекателя хирургического шовного материала (1208). Конкретнее, дистальный конец располагается за пройденной тканью (1206). Для целей данного примера компоненты устройства манипулирования хирургическим шовным материалом конфигурируются так, как описано выше со ссылкой на Фиг.8.
Когда ткань (1206) удерживается с использованием ловушки (1210) извлекателя хирургического шовного материала (1208), игла (1204) используется для пропускания хирургического шовного материала (1212) через ткань (1206) так, как показано на Фиг.12B. В данном примере игла (1204) продвигается через ткань (1206), в то время как извлекатель хирургического шовного материала (1208) и корпус (1202) остаются по существу в неподвижном положении относительно ткани (1206). Ткань (1206) удерживается на месте ловушкой (1210) извлекателя хирургического шовного материала (1208), когда игла (1204) вместе с хирургическим шовным материалом (1212) проникает внутрь и проходит через ткань (1206). В данном примере дистальный конец иглы (1204) перемещается за ловушку (1210) извлекателя хирургического шовного материала (1208). Затем, когда дистальный конец иглы (1204) выходит за ловушку (1210) извлекателя хирургического шовного материала (1208), дистальный конец иглы (включая хирургический шовный материал (1212)) проходит между двумя стержнями и над полукруглой петлей, соединяющей две ветви ловушки (1210) извлекателя хирургического шовного материала (1208). Когда игла (1204) (а также хирургический шовный материал (1212), подвергаемый манипуляции иглой (1204)) проходит достаточно далеко за ткань (1206), хирургический шовный материал (1212) освобождается из иглы (1204).
После освобождения из иглы (1204) хирургического шовного материала (1212) игла (1204) отводится назад через ткань (1206) так, как показано на Фиг.12C. Аналогично выдвижению иглы (1204), как описано выше применительно к Фиг.12B, корпус (1202) и извлекатель хирургического шовного материала (1208) могут оставаться по существу в неподвижном положении относительно ткани (1206) в то время как игла (1204) выводится из ткани (1206) и убирается в корпус (1202).
Когда игла (1204) достаточно отводится (например, полностью убирается в корпус (1202), полностью выводится из ткани (1206)), извлекатель хирургического шовного материала (1208), с использованием ловушки (1210) захватывает и закрепляет хирургический шовный материал (1212) так, как показано на Фиг.12D. Хирургический шовный материал (1212) может быть захвачен в ловушку (1210) одним из ряда способов. В данном примере ловушка (1210) поднимается для вывода из ткани (1206), и при этом также захватывает хирургический шовный материал (1212) между двумя стержнями и полукруглой петлей, соединяющей два стержня в ловушке (1210). Ловушка (1210) может подниматься при подъеме и/или наклоне корпуса (1202). Когда хирургический шовный материал (1212) закрепляется в ловушке (1210), происходит удаление всего устройства.
Один или большее количество вариантов реализации настоящего изобретения предназначены для манипулирования хирургическим шовным материалом. Конкретнее, варианты реализации настоящего изобретения позволяют пользователю более эффективно проталкивать и/или извлекать хирургический шовный материал для создания одного или большего количества швов в ткани. Создание аккуратных швов в ткани может быть процессом с большими затратами времени из-за размера используемых инструментов (например, хирургического шовного материала, иглы, устройства извлечения хирургического шовного материала), и/или из-за малой величины рабочей области для создания швов в ткани. Варианты реализации настоящего изобретения могут уменьшить расходуемое пользователем время и повысить точность швов, создаваемых пользователем.
В вариантах реализации настоящего изобретения пользователем может быть хирург, медсестра, технический специалист, врач, ветеринар или любой аналогичный профессионал, создающий швы в тканях для закрывания раны. Варианты реализации настоящего изобретения могут позволять пользователю обеспечивать удержание ткани от миграции и перемещении при ее прокалывании для пропускания хирургического шовного материала. В вариантах реализации настоящего изобретения может также устраняться необходимость использования отдельного устройства для извлечения хирургического шовного материала после того, как данный хирургический шовный материал проходит через ткань. В вариантах реализации настоящего изобретения может также устраняться необходимость использования отдельного вспомогательного вещества (например, кости) для обеспечения стабильности мягкой ткани при ее прокалывании. В вариантах реализации настоящего изобретения может также автоматически захватываться хирургический шовный материал после того, как данный хирургический шовный материал проходит через ткань.
Кроме того, варианты реализации настоящего изобретения могут позволять хирургическому шовному материалу проходить через ткань с использованием устройства манипулирования хирургическим шовным материалом минимального диаметра (1,0 мм или меньше). В настоящее время используются инструменты диаметром примерно 2,5 мм для манипулирования прохождением хирургического шовного материала через ткань. Варианты реализации настоящего изобретения также обеспечивают преимущество включения в единый инструмент устройства толкателя хирургического шовного материала и извлекателя хирургического шовного материала. Варианты реализации настоящего изобретения также обеспечивают преимущество использования убираемой ловушки, приспособленной для захвата и удержания хирургического шовного материала при его извлечении. Поворачивание ловушки в одном или большем количестве направлений вращения позволяет в вариантах реализации настоящего изобретения более легко и эффективно осуществлять захват и закрепление хирургического шовного материала для его извлечения.
Хотя настоящее изобретение было описано с привязкой к ограниченному количеству вариантов его реализации, специалисты в данной области техники, получившие выгоду от настоящего описания, должны понимать, что могут быть предложены и другие варианты реализации, не отклоняющиеся от раскрытого здесь объема настоящего изобретения. Таким образом, объем настоящего изобретения должен ограничиваться только прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ КРЕПЛЕНИЯ МЯГКОЙ ТКАНИ К КОСТИ | 2005 |
|
RU2416371C2 |
| ИМПЛАНТИРУЕМЫЕ СЛОИ И СПОСОБЫ МОДИФИКАЦИИ ФОРМЫ ИМПЛАНТИРУЕМЫХ СЛОЕВ ДЛЯ ПРИМЕНЕНИЯ С ХИРУРГИЧЕСКИМ СШИВАЮЩИМ ИНСТРУМЕНТОМ | 2015 |
|
RU2689766C2 |
| МЕХАНИЗМЫ РЕГУЛИРОВКИ МОЩНОСТИ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ И АККУМУЛЯТОРОВ | 2011 |
|
RU2573584C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ СО СХЕМОЙ УПРАВЛЕНИЯ ПИТАНИЕМ | 2011 |
|
RU2586310C2 |
| ЭЛЕКТРОХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2019 |
|
RU2779032C1 |
| ФИКСАТОР ТКАНЕВОГО ТРАНСПЛАНТАТА | 2011 |
|
RU2577812C2 |
| САМОУДЕРЖИВАЮЩИЕСЯ ШОВНЫЕ МАТЕРИАЛЫ, ВЫДЕЛЯЮЩИЕ ЛЕКАРСТВЕННЫЕ СРЕДСТВА, И ОТНОСЯЩИЕСЯ К НИМ МЕТОДЫ | 2011 |
|
RU2608237C2 |
| КОНЦЕВОЙ ЭФФЕКТОР ДЛЯ СШИВАНИЯ ТКАНИ | 2015 |
|
RU2682478C2 |
| САМОУДЕРЖИВАЮЩИЕСЯ ШОВНЫЕ МАТЕРИАЛЫ ДЛЯ НЕОТЛОЖНОЙ ПОМОЩИ И УПАКОВКИ ДЛЯ НИХ | 2011 |
|
RU2580479C2 |
| ИМПЛАНТИРУЕМЫЕ СЛОИ, СОДЕРЖАЩИЕ СПРЕССОВАННЫЙ УЧАСТОК | 2015 |
|
RU2703827C2 |
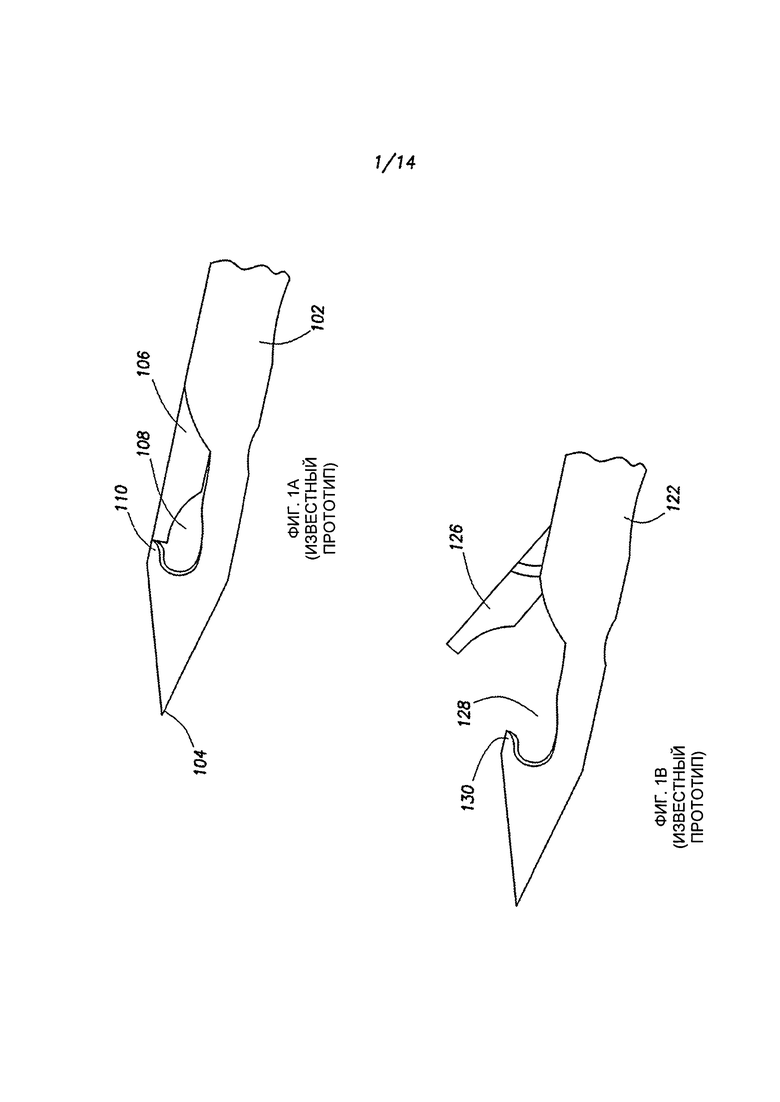
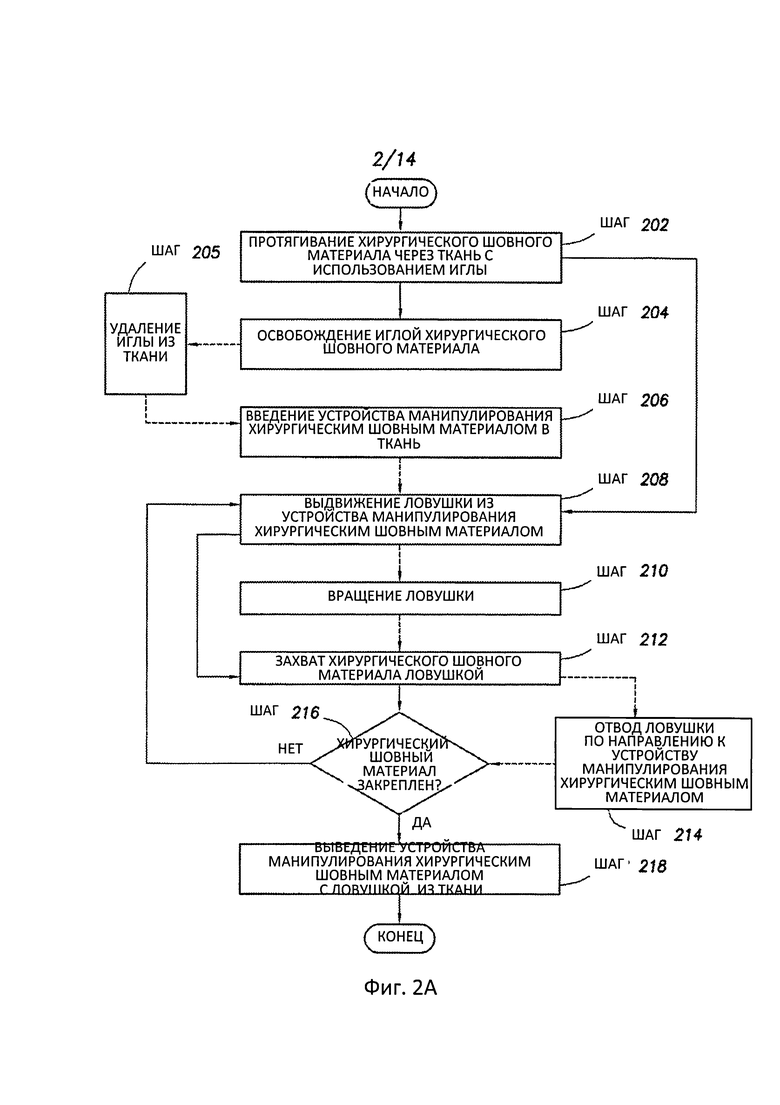
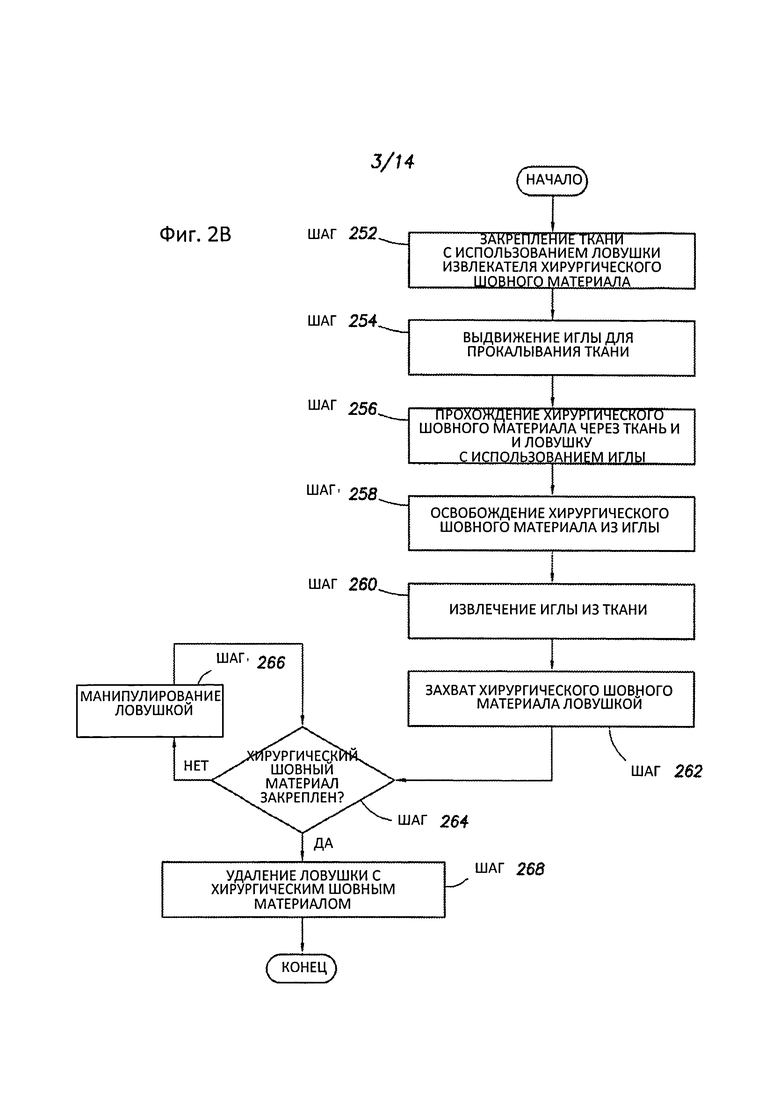
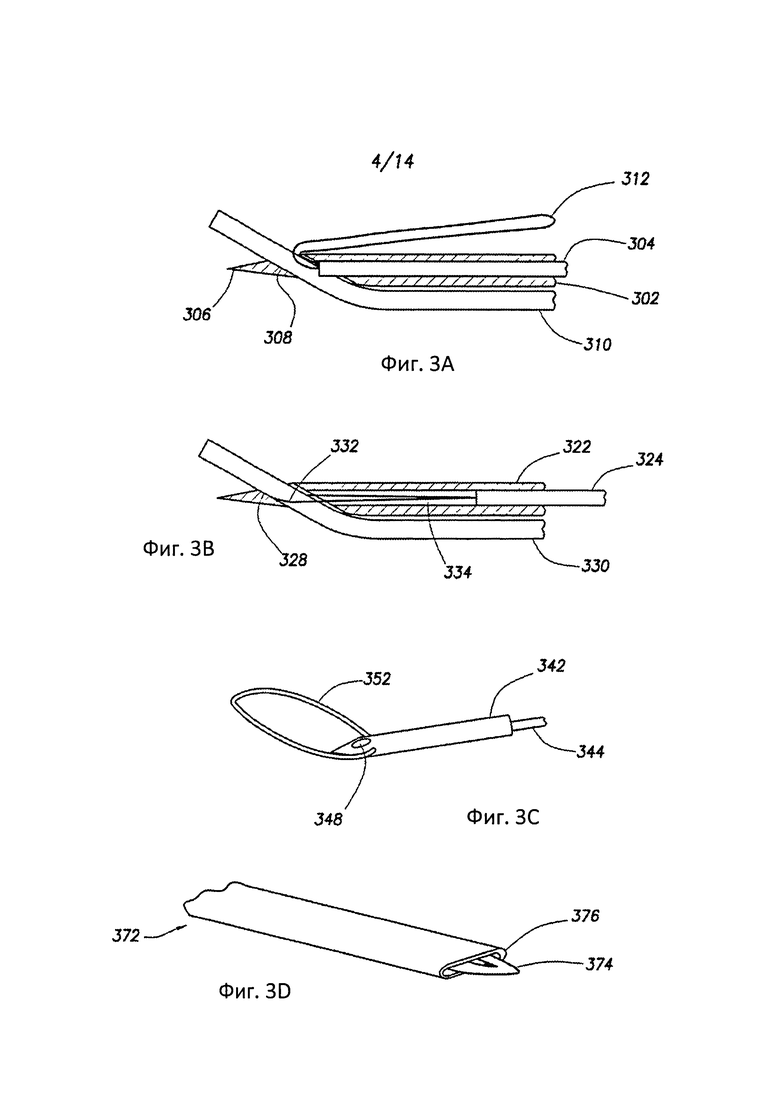
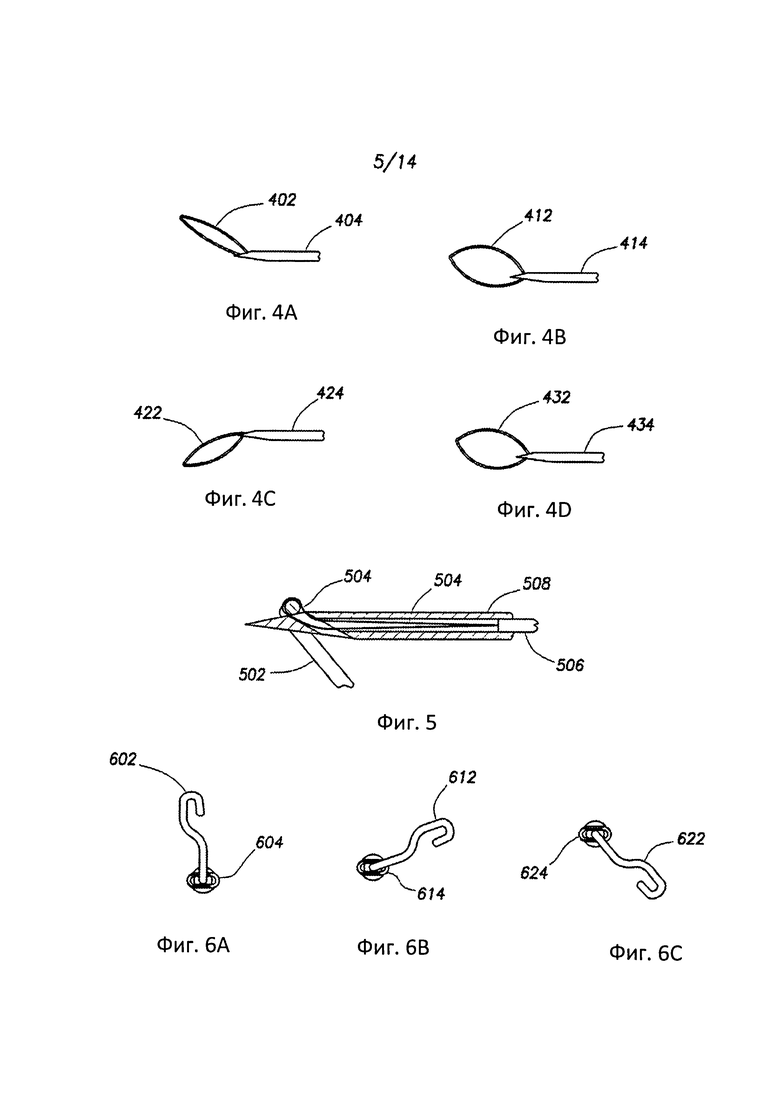
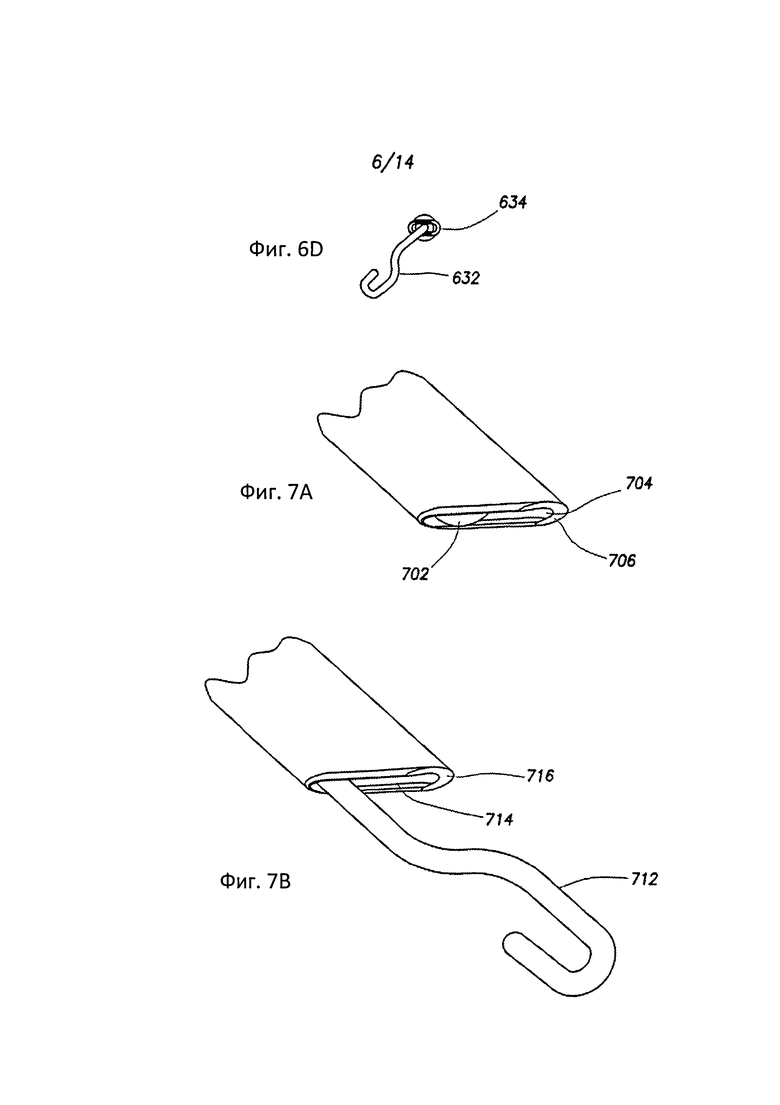
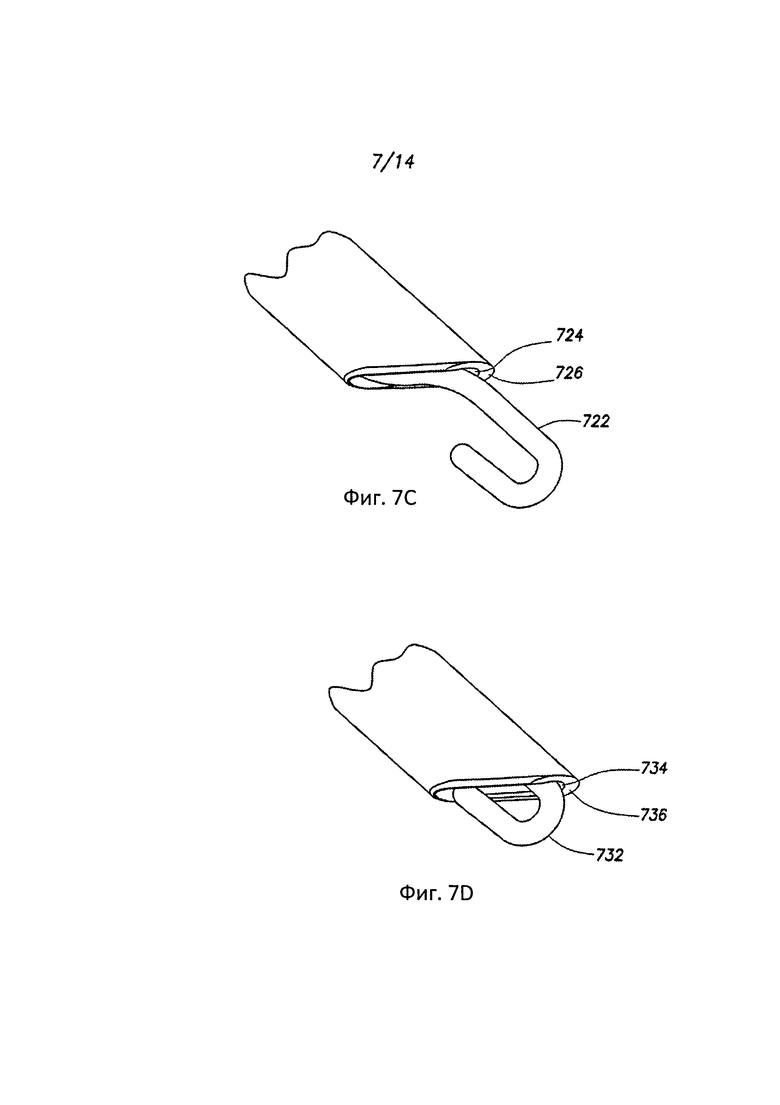
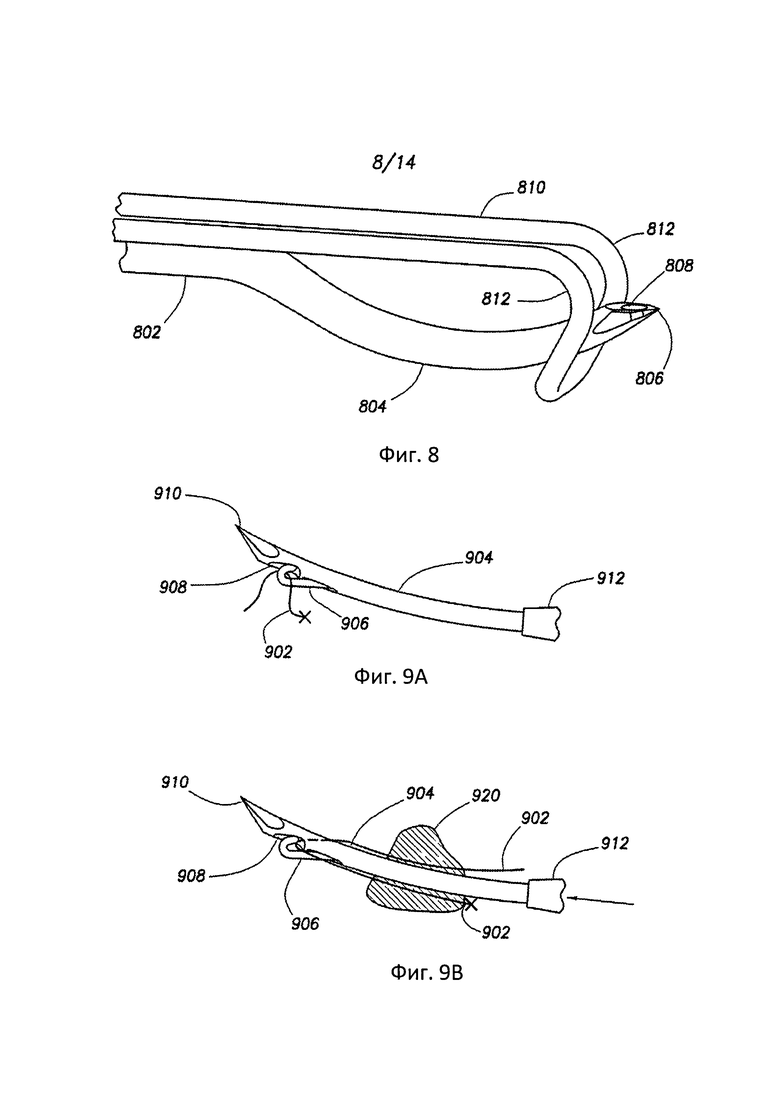
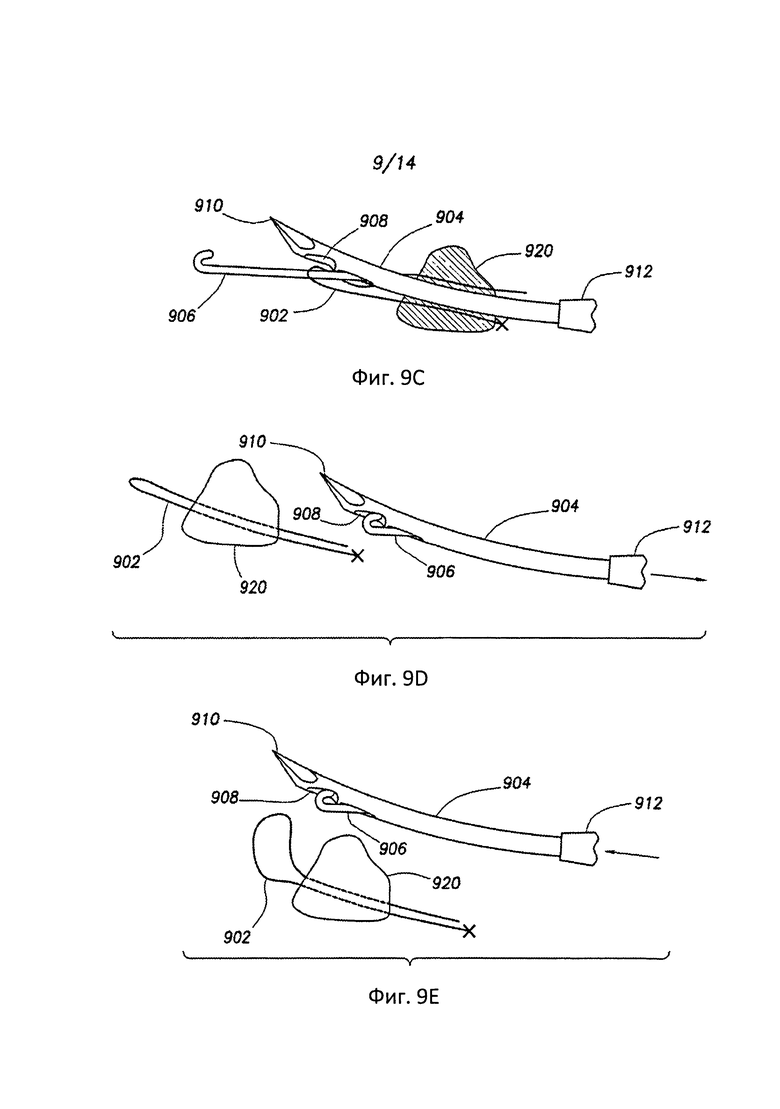
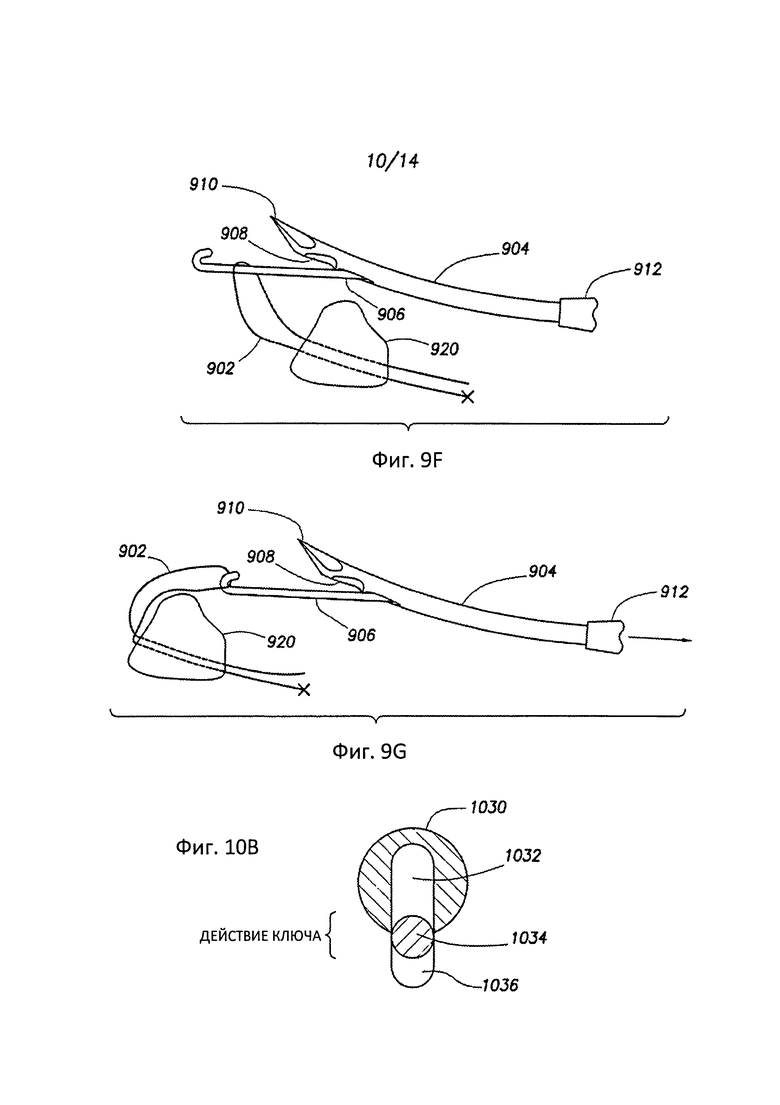
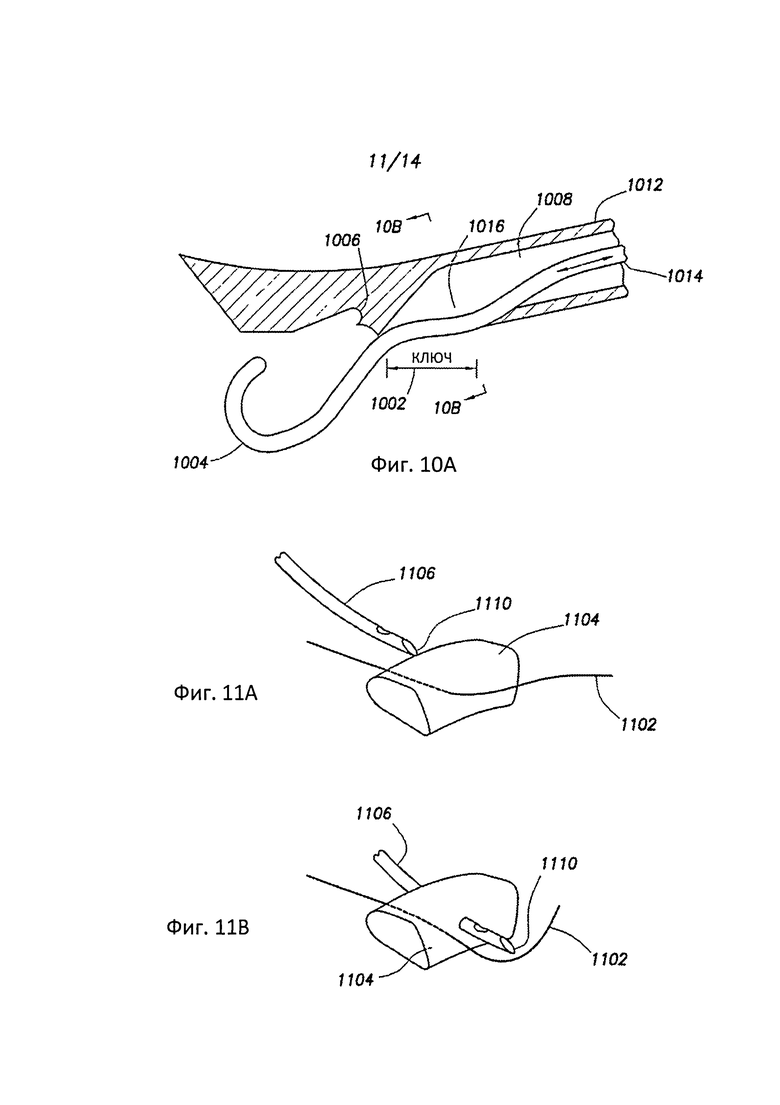
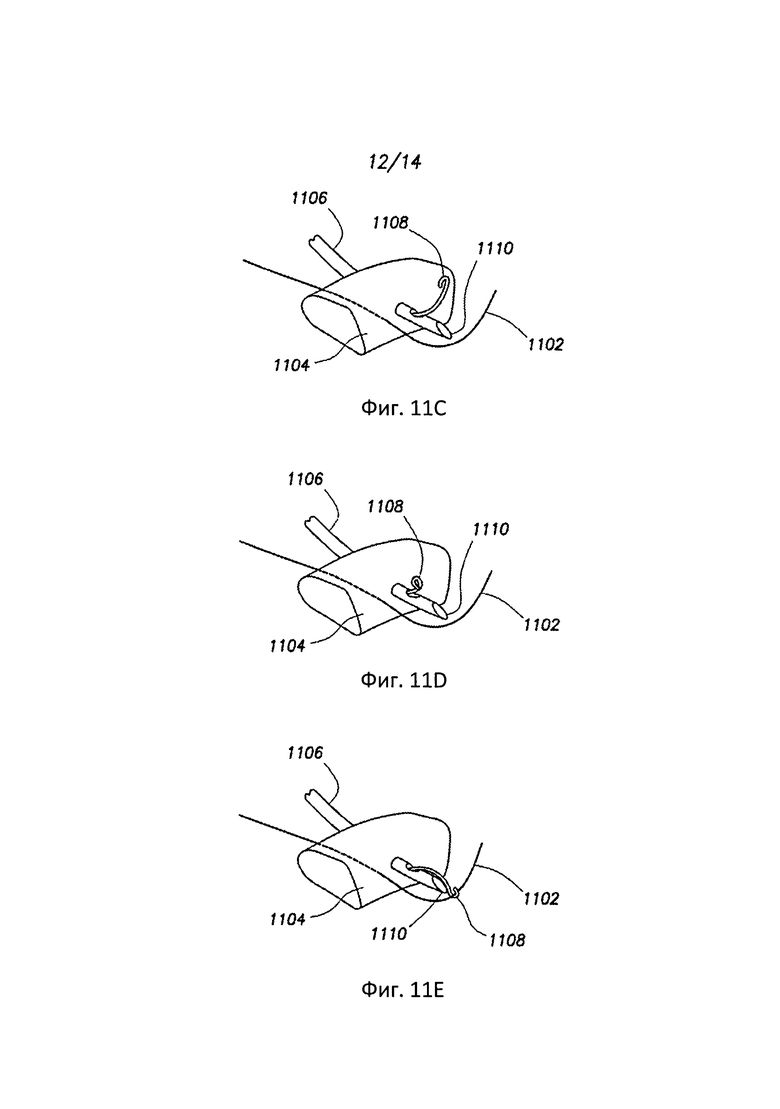
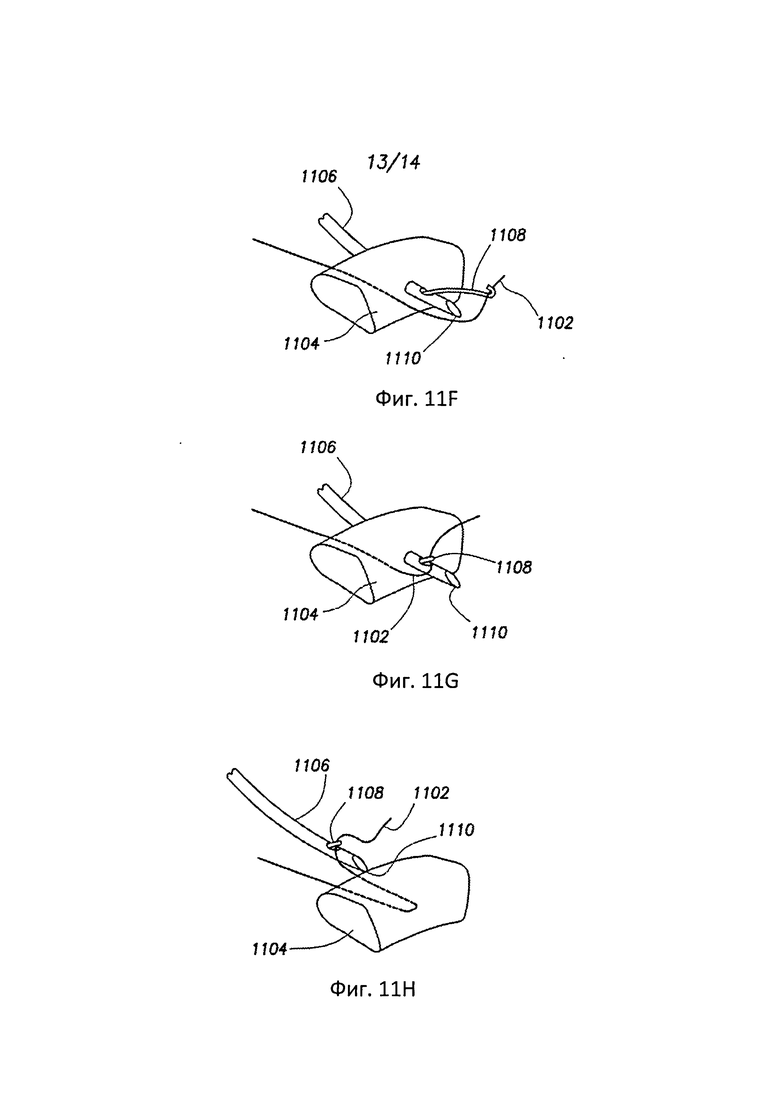
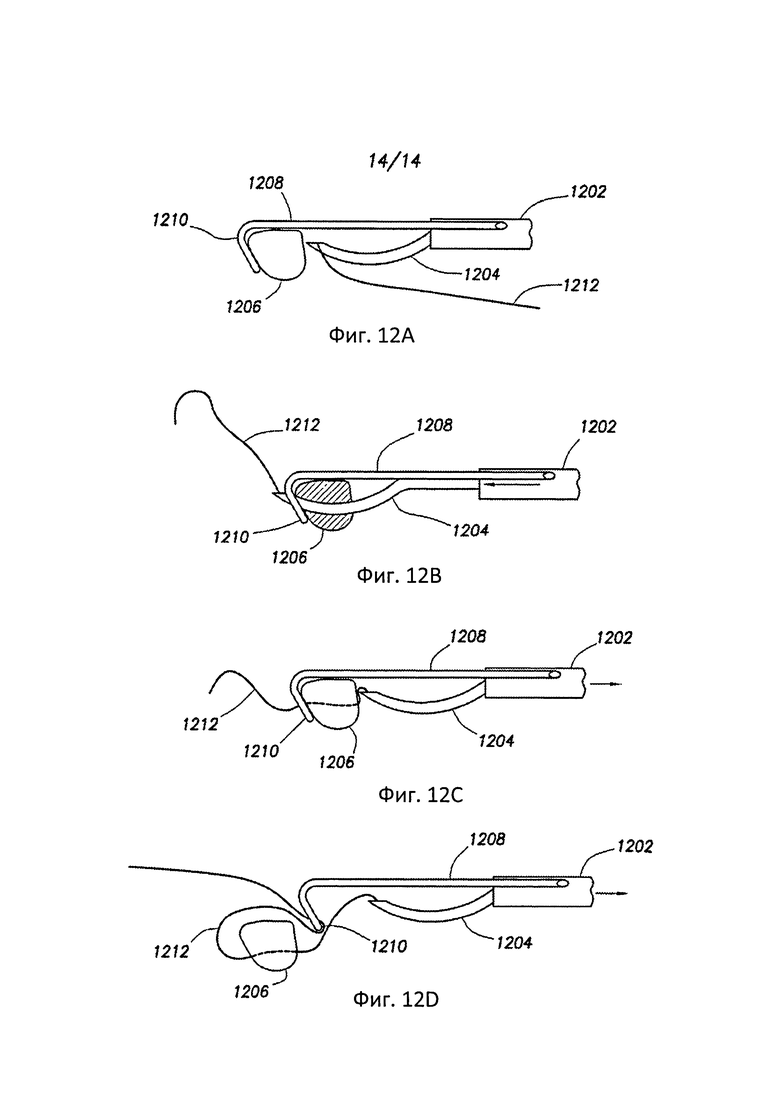
Изобретение относится к медицине и может быть использовано для наложения хирургических швов. Способ манипулирования хирургическим шовным материалом осуществляют устройством, которое включает корпус и ловушку. Ловушка функционально соединена с корпусом и приспособлена для выдвижения из штампованного корпуса, и, после выдвижения из корпуса, поворачивается независимо от корпуса и поддерживает ткань. Ловушка приспособлена для захвата и закрепления участка хирургического шовного материала, проходящего через ткань при поворачивании. 4 з.п. ф-лы, 12 ил.
1. Способ манипулирования хирургическим шовным материалом, включающий:
обеспечение поддержки ткани с использованием ловушки устройства манипулирования хирургическим шовным материалом;
захват участка хирургического шовного материала с использованием указанной ловушки и без перемещения ловушки тогда, когда данный участок хирургического шовного материала проходит через ткань и освобождается иглой;
закрепление, при удалении поддержки ткани, этого участка хирургического шовного материала ловушкой; и
удаление из ткани ловушки с этим участком хирургического шовного материала.
2. Способ по п. 1, в котором ловушка и игла являются частью устройства.
3. Способ по п. 1, в котором ловушка содержит два параллельных стержня, соединенных полукруглой петлей, и изогнута на некоторый угол так, что она перпендикулярна игле, проходящей через ткань.
4. Способ по п. 3, в котором часть хирургического шовного материала проходит между полукруглой петлей и двумя параллельными стержнями ловушки.
5. Способ по п. 4, в котором часть хирургического шовного материала, прошедшего через ткань, расположена внутри иглы.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| US 5772672 A, 30.06.1998 | |||
| Устройство А.Л.Косаковского для наложения швов | 1987 |
|
SU1443873A1 |
| Устройство для наложения шва | 1984 |
|
SU1331495A1 |

