Настоящее изобретение относится к устройствам для манипулирования объектами с использованием акустического силового поля в канале, а конкретнее в микроканале.
Уровень техники
С помощью акустофореза возможны манипулирование частицами и их сортировка посредством воздействия акустическими силами. Традиционная технология, известная из предшествующего уровня техники, состоит в создании по меньшей мере одного узла акустического давления в заданном положении вдоль какого-либо размера канала (длины, ширины или толщины) с обеспечением режима резонанса для акустической волны.
Настоящее изобретение позволяет не учитывать требование к положению узла давления, предъявляемое в связи с необходимостью обеспечения режима резонанса.
В документе WO 2006/095117 описано устройство жидкостной сепарации, в котором может генерироваться акустическое силовое поле.
В документах WO 98/17373 и WO 02/072234 описаны способы сепарации частиц посредством воздействия акустическим силовым полем, позволяющие формировать в канале стоячую волну.
В публикации Дрона (Dron) В публикации «Parametric study of acoustic focusing of particles in a micro-channel in the perspective to improve micro-PIV measurements» (Параметрическое исследование акустической фокусировки частиц в целях усовершенствования микроPIV-измерений) (Microfluid Nano-fluid (2009) 7:857-867) высказана целесообразность акустической фокусировки посредством формирования стоячей волны в канале в целях усовершенствования микроPIV-измерений.
В документе WO 2009/071733 описана фокусировка частиц по ширине микроканала благодаря использованию акустического преобразователя, работающего на частотах, соответствующих резонансным частотам указанного микроканала.
В документе WO 2006/032703 описан способ сепарации частиц посредством переключения («switch») приложенной частоты с одной резонансной частоты канала на другую.
В публикации Глинна-Джонса (Glynne-Jones) с соавторами «Mode-switching: А new technique for electronically varying the agglomeration position in an acoustic particle manipulator» (Переключение режимов: Новая методика электронного изменения положения агломерации в акустическом манипуляторе частиц) (Ultrasonics 50 (2010) 68-75) рассматривается возможность смещения высоты акустической фокусировки на части высоты канала посредством быстрого переключения рабочей частоты с одной резонансной частоты указанного канала на другую.
В публикации Свеннебринга (Svennebring) с соавторами «Selective Bioparticle Retention and Characterization in a Chip-Integrated Confocal Ultrasonic Cavity» (Избирательное удержание и определение параметров биочастиц во встроенной в чип конфокальной ультраакустической полости) (J. Biotech. Bioeng, 103, 323-328 (2009)) рассматривается возможность манипулирования клетками благодаря работе на одной из резонансных частот полости.
В публикации Петерссона (Petersson) с соавторами «Separation of lipids from blood utilizing ultrasonic standing waves in microfluidic channels» (Сепарация липидов из крови с использованием ультраакустических стоячих волн в микрожидкостных каналах) (Analyst, 2004, 129, 938-943) описана сепарация липидов из крови посредством формирования стоячей акустической волны.
В публикации Липкенса (Lipkens) с соавторами «The Effect of Frequency Sweeping and Fluid Flow on Particles Trajectories in Ultrasonic Standing Waves» (Влияние качания частоты и потока жидкости на траектории частиц в ультраакустических стоячих волнах) (IEEE Sensors Journal, Vol. 8, No. 6, Juin 2008, 667-677) описано модулирование эффекта, создаваемого при изменении рабочей частоты преобразователя, генерирующего акустическое силовое поле по длине макроканала.
Использование многочисленных известных на сегодняшний день методов акустофореза сильно ограничивается положением узлов давления, которое определяется необходимостью соблюдения режима резонанса.
В случае с отрицательным коэффициентом контрастности акустического сопротивления (пузырьки, липиды, липосомы) происходит миграция частиц в сторону пучности давления.
Известно также, что в документе WO 2004/030800 описано использование устройства, способствующего интенсификации явлений перемешивания в канале, но совершенно не говорится о каком-либо сходном явлении, которое можно было бы наблюдать при акустической фокусировке.
Кроме того, может оказаться, что известные методики не будут пригодными для достаточно эффективной фокусировки в канале значительного количества объектов, и в частности, слоев объектов.
Таким образом, существует потребность в разработке устройства, которое обеспечивало бы возможность фокусировки объектов по всему размеру канала, а не только в отдельных его местах, соответствующих узлам или пучностям давления, создаваемым при работе на резонансной частоте канала.
Желательно также иметь устройство, обеспечивающее возможность фокусировки в канале больших количеств объектов, и в частности, слоев объектов.
Имеется также потребность в разработке устройства, которое обеспечивало бы возможность изменения положения фокусировки объектов в зависимости от какой-либо характеристики и/или положения этих объектов в канале.
Требуется также получить устройство, обеспечивающее возможность надежного измерения нормы, и/или ориентации, и/или направления вектора скорости находящихся в канале объектов.
Цель настоящего изобретения состоит в полном или частичном удовлетворении перечисленных выше потребностей.
Раскрытие изобретения
В соответствии с первым аспектом изобретения, его предметом является устройство, предназначенное для манипулирования объектами, находящимися в канале внутри текучей среды, конкретнее жидкости, содержащее:
- канал, идущий по продольной оси, причем канал имеет поперечное сечение с шириной, измеряемой вдоль первой поперечной оси, и толщиной, измеряемой вдоль второй поперечной оси, перпендикулярной к первой, при этом ширина больше толщины или равна ей и канал имеет располагающиеся вдоль второй поперечной оси первую и вторую стенки,
- генератор акустических волн, генерирующий акустические волны по меньшей мере от одной из указанных стенок,
причем указанный генератор акустических волн работает на частоте f, отличной от резонансной частоты f0 канала вдоль второй поперечной оси.
Под «продольно осью канала» следует понимать линию, соединяющую ансамбль барицентров поперечных сечений канала. Продольная ось канала может быть прямолинейной или криволинейной и может лежать в плоскости, которая может быть плоскостью симметрии для некоторых или даже всех поперечных сечений канала.
Толщина е канала соответствует измеренному вдоль второй поперечной оси расстоянию между первой и второй стенками.
Выражение «f0 является резонансной частотой канала вдоль второй поперечной оси» следует понимать так, что величина f0 такова, что толщина e канала, измеренная в зоне данного положения вдоль продольной оси канала, удовлетворяет уравнению 

Заявители экспериментально доказали возможность изменения положения акустической фокусировки на значительной части канала. Этот эффект был получен путем генерации акустической волны в толще указанного канала и изменения рабочей частоты генератора акустических волн в пределах между разными частотами, каждая из которых отлична от резонансной частоты указанного канала вдоль его второй поперечной оси.
Не претендуя на какое-либо разъяснение или теоретическое обоснование, заявители полагают, что благодаря генерации акустического силового поля по толщине, а не по ширине, как в документе WO 2009/071733, можно добиться ограничения эффекта акустического течения («acoustic streaming»).
Соответственно, настоящее изобретение позволяет не ограничиваться лишь дискретными перемещениями для положений фокусировки и представляет собой, таким образом, серьезную инновацию в технике манипулирования объектами в канале посредством использования акустического силового поля.
Целесообразно, чтобы по меньшей мере один слой объектов формировался посредством акустической фокусировки.
Целесообразно также, чтобы по меньшей мере один экстремум акустического давления формировался в текучей среде генерируемыми акустическими волнами.
Слой объектов фокусируется предпочтительно в зоне экстремума акустического давления (акустического узла или пучности), формирующегося в текучей среде генерируемыми акустическими волнами. Может быть сформирована, например, целая группа отдельных слоев объектов, причем каждый из этих слоев располагается в зоне отдельного экстремума акустического давления.
Сформированный слой объектов может иметь удлиненную форму по продольной оси канала, будучи, например, овальным или прямоугольным при наблюдении в направлении, перпендикулярном к плоскости сглаживания слоя. В соответствии с одним из вариантов, сформированный слой объектов может при наблюдении в направлении, перпендикулярном к плоскости его сглаживания, иметь круглую или квадратную форму.
Генератор акустических волн
Генератор акустических волн может работать, например, на частоте меньшей или равной 10 МГц, а точнее - в пределах от 0,5 до 10 МГц.
Благодаря использованию генератора акустических волн в указанных частотных диапазонах становится возможным манипулирование живыми клетками без их повреждения.
Генератор акустических волн работает предпочтительно на частоте f, отличной от f0 и находящейся в пределах от 0,75f0 до 1,25f0, а точнее - от 0,75f0 до 0,95f0 или от 1,05f0 до 1,25f0.
Благодаря использованию генератора акустических волн в указанных частотных диапазонах становится возможным создание акустической силы, которая будет достаточно большой для обеспечения приемлемой фокусировки частиц.
В качестве генератора акустических волн используется предпочтительно широкополосный генератор акустических волн.
Можно разместить множество генераторов акустических волн вдоль канала с генерацией при этом акустических волн по меньшей мере от одной из первой и второй стенок, причем указанные генераторы акустических волн могут располагаться конкретно с одной и той же стороны от канала.
Использование множества генераторов акустических волн является преимуществом в том случае, когда текучая среда циркулирует с высокой скоростью или когда необходимо генерировать слои частиц больших размеров. В первом случае, чем выше скорость текучей среды, тем меньше время пролета под генераторами. Для этого может потребоваться использование большего числа преобразователей для достижения фокусировки. Во втором же случае, например в отсутствие потока, можно применить для формирования слоев частиц больших размеров несколько генераторов акустических волн.
При использовании нескольких генераторов акустических волн по меньшей мере один из них может генерировать акустическую волну вдоль первой поперечной оси канала, то есть по ширине этого канала.
В этом последнем случае отношение ширины к толщине может составлять от 1 до 10, конкретнее от 1 до 3.
Благодаря тому обстоятельству, что возможно воздействие акустическим силовым полем по толщине и по ширине, появляется возможность переноса целой группы частиц, например линии частиц, в какую-либо зону канала, что позволит воспользоваться большим количеством мест, пригодных для акустической фокусировки.
Генератор акустических волн может питаться синусоидальным напряжением. В соответствии с другим вариантом, генератор акустических волн может питаться напряжением треугольной или прямоугольной формы.
Для генератора акустических волн может быть использовано цифровое или аналоговое управление.
Генератор акустических волн может быть прикреплен, например, к первой стенке канала, ко второй его стенке или к обеим этим стенкам. Это крепление может быть осуществлено с помощью любого известного специалистам способа, и в частности, приклеивания.
Между генератором акустических волн и по меньшей мере одной из первой и второй стенок канала может быть помещен слой материала для акустического согласования.
Акустическое согласование может быть достигнуто благодаря применению любого известного специалистам материала, пригодного для этой цели.
Канал
Толщина канала может быть при движении по его продольной оси постоянной или переменной, например, с формированием по меньшей мере двух следующих друг за другом в осевом направлении зон с разной толщиной.
Толщина канала может быть, например по меньшей мере на части его длины, и в частности, на всей его длине, меньше 3 см, предпочтительнее меньше 1 см. Канал может представляет собой, например, микроканал.
Под словом «микроканал» следует понимать канал, толщина которого на всей его длине меньше или равна 1 мм.
Толщина канала по меньшей мере на части его длины, и в частности, на всей его длине, может находиться в пределах от 50 мкм до 1 мм, предпочтительнее от 100 мкм до 500 мкм.
Ширина канала может быть при движении по его продольной оси постоянной или переменной, например, с формированием по меньшей мере двух следующих друг за другом в осевом направлении зон с разной шириной.
Ширина канала по меньшей мере на части его длины, и в частности, на всей его длине, может находиться в пределах от 1 мм до 30 мм, предпочтительнее от 5 мм до 20 мм.
Канал иметь, по существу, постоянное поперечное сечение при движении по его продольной оси.
Канал может иметь по меньшей мере на части его длины, и в частности, на всей его длине, прямоугольное поперечное сечение.
В соответствии другим вариантом, канал может иметь по меньшей мере на части его длины, и в частности, на всей его длине, квадратное или круглое поперечное сечение.
Длина канала, измеренная по продольной оси, может находиться в пределах, например, от 3 мм до 10 см, предпочтительнее от 10 мм до 70 мм.
Предпочтительное отношение длины канала к его толщине может быть больше или равно 10, например, больше или равно 12.
По меньшей мере, одна из первой и второй стенок, а предпочтительнее обе, могут включать в себя, а конкретнее быть выполненными из материала, выбираемого из следующей группы: минеральные или органические стекла, кварц, термопластичные материалы, в частности, РММА или поликарбонат, металлы. В более общем случае можно использовать любой материал с высоким акустическим сопротивлением, то есть по меньшей мере в десять раз превышающим акустическое сопротивление текучей среды.
Стенка, находящаяся напротив той, с которой генерируются акустические волны, может включать в себя, а конкретнее быть выполненной из материала с акустическим сопротивлением по меньшей мере в десять раз превышающим акустическое сопротивление текучей среды.
Благодаря тому, что в стенках использованы материалы с высоким акустическим сопротивлением, удается добиться более эффективной акустической фокусировки объектов с получением при этом четкого экстремума давления.
В соответствии с одним из примеров осуществления по меньшей мере одна из первой и второй стенок, а предпочтительнее обе, могут включать в себя, а конкретнее быть выполненными из минерального или органического стекла либо из РММА.
Устройство может быть выполнено таким образом, чтобы генератор акустических волн генерировал акустические волны с первой стенки канала, которая может быть верхней стенкой, и чтобы:
- первая и вторая стенки включали в себя, а конкретнее были выполненными из РММА, или
- первая стенка и вторая стенка включали в себя, а конкретнее были выполненными из минерального или органического стекла, или
- первая стенка включала в себя, а конкретнее была выполненной из РММА, а вторая стенка включала в себя, а конкретнее была выполненной из минерального или органического стекла.
Первая и/или вторая стенки могут иметь, например, форму пластин.
Толщина первой и/или второй стенок может составлять по меньшей мере на части, а конкретнее на всей их длине, от 0,5 мм до 5 мм.
По меньшей мере, одна из первой и второй стенок, например обе, может (могут) быть непрозрачной(ыми).
В соответствии с другим вариантом по меньшей мере одна из первой и второй стенок, например обе, может (могут) быть прозрачной(ыми). Предпочтение прозрачным стенкам можно отдать в том случае, когда необходимо получить изображения объектов, находящихся в канале, как будет детальнее разъяснено ниже.
Стенка(и), противоположная(ые) стенке(ам), с которой(ых) генерируются акустические волны, может (могут) в процессе работы устройства свободно вибрировать.
Канал может иметь множество выходов, к которым избирательно направляются объекты в соответствии с частотой f, на которой работает генератор акустических волн.
Размер выхода(ов), к которому(ым) избирательно направляются объекты, может быть согласован с размером указанных объектов.
Текучие среды и объекты
Текучая среда может представлять собой какую-либо биологическую жидкость, например, кровь.
Альтернативным примером текучей среды может быть, например, вода.
Текучая среда может быть, например, прозрачной для излучения в видимом диапазоне.
Во время функционирования устройства текучая среда может находиться в покое. В других условиях текучая среда может во время работы устройства пребывать в состоянии истечения, например, ламинарного потока.
В качестве объектов могут быть использованы, например, моно- или полидисперсные биологические клетки, конкретнее клетки крови, и в частности, кровяные шарики. В этом последнем случае способ согласно изобретению можно применить, например, в рамках технологий сортировки указанных биологических клеток.
Объекты могут представлять собой жесткие или деформируемые частицы, в частности, частицы полистирола.
Средний размер находящихся в канале объектов может быть, например, меньше или равным 50 мкм. Под «средним размером» понимается статистический размер гранулометрической фракции в половине популяции, обозначаемый символом D50.
Частоту f, на которой работает генератор акустических волн, можно выбрать такой, чтобы соответствующая длина волны была больше среднего размера находящихся в канале объектов, а предпочтительнее - больше или равна десятикратной величине этого среднего размера.
Толщина канала может быть по меньшей мере в зоне положения вдоль продольной оси, где генерируются акустические волны, больше или равной десятикратной величине среднего размера находящихся в канале объектов.
Датчик и система управления
В соответствии с одним из примеров осуществления, предметом изобретения может быть узел, содержащий устройство типа описанного выше, с которым связаны:
- датчик, обеспечивающий измерение по меньшей мере одной характеристики и/или положения находящихся в канале объектов, причем указанный датчик вырабатывает сигнал в зависимости от результата этого измерения, и
- система управления, в которую поступает указанный сигнал и которая управляет частотой f, на которой работает генератор акустических волн, и/или амплитудой генерируемых акустических волн в зависимости от указанного сигнала.
Датчик может также выполнять измерение по меньшей мере одной характеристики текучей среды, конкретнее скорости ее истечения, и/или ее расхода, и/или ее температуры, при этом указанный датчик вырабатывает сигнал в зависимости от результата этого измерения, а система управления принимает указанный сигнал и управляет частотой f, на которой работает генератор акустических волн, и/или амплитудой генерируемых акустических волн в зависимости от указанного сигнала.
Когда текучая присутствующая в канале текучая среда пребывает в состоянии истечения, датчик может быть помещен, например по меньшей мере перед одним генератором акустических волн по направлению потока.
В соответствии с другим вариантом, датчик может быть помещен по меньшей мере за одним генератором акустических волн по направлению потока.
Датчик может выполнять измерение, например, размера объектов. В этом случае датчик может содержать:
- источник света, конкретнее лазер, предназначенный для освещения объектов, находящихся в некоторой заданной зоне канала, и
- систему управления, содержащую, а конкретнее образованную детектором светового излучения, который обеспечивает детектирование светового излучения, исходящего из указанного источника света и рассеиваемого указанными объектами, и может вырабатывать сигнал, являющийся функцией размера объектов, которые произвели рассеяние светового излучения.
В соответствии с одним из примеров осуществления, концентрация объектов в заданной зоне канала может быть измерена датчиком.
В качестве датчика можно использовать, например, счетчик Коултера или УФ детектор.
В состав системы управления может быть включен компьютер.
Система управления может управлять работой каскада питания генератора акустических волн, например, генератора сигнала, соединенного с усилительным каскадом.
Получение и обработка изображений находящихся в канале объектов
В соответствии с одним из вариантов его осуществления, изобретение может относиться к узлу, содержащему:
- устройство типа описанного выше,
- систему освещения, сконструированную таким образом, чтобы она освещала по меньшей мере часть находящихся в канале объектов, и
- систему получения изображений, сконструированную таким образом, чтобы обеспечивался получение по меньшей мере одного изображения по меньшей мере части объектов, находящихся в канале и освещаемых системой освещения,
причем указанный узел включает в себя, в частности, устройство обработки по меньшей мере одного изображения, создаваемого системой получения.
Система освещения может быть сконструирована таким образом, чтобы она освещала весь слой или часть слоя объектов, полученного в результате акустической фокусировки.
Устройство обработки может обеспечивать измерение нормы, и/или ориентации, и/или направления вектора скорости по меньшей мере части находящихся в канале объектов, освещаемых системой освещения.
Узел согласно изобретению может, в частности, использоваться для реализации технологии цифровой трассерной визуализации по изображениям частиц (PIV).
В состав устройства обработки по меньшей мере одного изображения может быть, например, включен компьютер.
Устройство обработки изображения может быть сконструировано, например, таким образом, чтобы обеспечить расчет коэффициента корреляции распределений интенсивности света, полученных по меньшей мере для двух изображений объектов, создаваемых системой получения изображений.
Как обнаружили заявители, использование устройств и способов акустической фокусировки, описываемых в настоящем изобретении, позволяет усовершенствовать измерения, осуществляемые с использованием метода цифровой трассерной визуализации по изображениям частиц, благодаря, в частности, выполнению акустической фокусировки объектов в канале на точное положение по всей толщине этого канала.
В соответствии с одним из его аспектов, настоящее изобретение касается также, отдельно или в сочетании со сказанным выше, устройства, предназначенного для манипулирования объектами, находящимися в канале внутри текучей среды, конкретнее жидкости, содержащего:
- канал, идущий по продольной оси, причем канал имеет поперечное сечение с шириной, измеряемой вдоль первой поперечной оси, и толщиной, измеряемой вдоль второй поперечной оси, перпендикулярной к первой, при этом ширина больше толщины или равна толщине и канал имеет располагающиеся вдоль второй поперечной оси первую и вторую стенки, и
- широкополосный генератор акустических волн, генерирующий акустические волны по меньшей мере от одной из первой и второй стенок.
Способы
В соответствии с одним из его аспектов, настоящее изобретение касается также, отдельно или в сочетании со сказанным выше, способа манипулирования находящимися в канале объектами с помощью генератора акустических волн, конкретнее с использованием устройства или узла типа описанных выше, в соответствии с каковым способом:
- указанный канал идет по продольной оси и имеет поперечное сечение с шириной, измеряемой вдоль первой поперечной оси, и толщиной, измеряемой вдоль второй поперечной оси, перпендикулярной к первой, при этом ширина больше толщины или равна ей и канал имеет располагающиеся вдоль второй поперечной оси первую и вторую стенки, и
- указанный генератор акустических волн генерирует акустические волны по меньшей мере от одной из первой и второй стенок и работает на частоте f, отличной от резонансной частоты f0 канала вдоль второй поперечной оси.
Описанный выше способ можно применить по меньшей мере в одной из следующих областей: методы сортировки препаратов, например, жестких или деформируемых частиц, полидисперсных частиц, биологических клеток, конкретнее клеток крови, например раковых клеток, содержащихся в пробе крови или кровяных шариков, бактерий, коллоидных или неколлоидных эмульсий, белков или липосом, методы диагностики или анализа, методы очистки, обогащения или обеднения препаратов, методы синтеза препаратов, методы изменения физических или химических характеристик препаратов, методы исследования лекарственных средств, методы смешивания или методы измерения коэффициента диффузии.
Способ согласно изобретению можно применить, например, для сепарации частиц, изначально присутствующих в смеси полидисперсных частиц.
Различия в размере между полидисперсными частицами могут обеспечить возможность сепарации этих последних вследствие различий в скорости их миграции к узлу акустического давления, создаваемому вдоль толщины канала.
Предлагаемый способ может обеспечить возможность формирования по меньшей мере одного слоя объектов посредством акустической фокусировки. В частности, можно предусмотреть в рамках этого способа этап, состоящий в том, чтобы вызывать реакцию по меньшей мере двух химических веществ, присутствующих в слое, образуемом посредством акустической фокусировки.
Способ согласно изобретению позволяет также добиться коагуляции нескольких слоев объектов или сплавления пленок.
Предлагаемый способ может также обеспечить выполнение фильтрации без фильтра благодаря избирательной фокусировке подвергаемых манипуляции объектов.
В соответствии с еще одним его аспектом, изобретение касается, отдельно или в сочетании со сказанным выше, способа манипулирования находящимися в канале объектами с помощью генератора акустических волн, конкретнее с использованием устройства типа описанного выше, в соответствии с каковым способом:
- указанный канал идет по продольной оси и имеет поперечное сечение с шириной, измеряемой вдоль первой поперечной оси, и толщиной, измеряемой вдоль второй поперечной оси, перпендикулярной к первой, при этом ширина больше толщины или равна ей и канал имеет располагающиеся вдоль второй поперечной оси первую и вторую стенки,
- указанный генератор акустических волн генерирует акустические волны по меньшей мере от одной из первой и второй стенок и работает на частоте f,
- по меньшей мере, одну характеристику и/или положение объектов, находящихся в канале, измеряют датчиком,
- указанный датчик генерирует сигнал в зависимости от результата указанного измерения,
- указанный сигнал подают в систему управления, обеспечивающую возможность управления частотой, на которой работает генератор акустических волн, и/или амплитудой генерируемых акустических волн в зависимости от указанного сигнала, и
- частоту f, на которой работает генератор акустических волн, изменяют в зависимости от указанного сигнала.
Способ согласно изобретению может включать в себя этап переноса объектов вдоль толщины канала в результате изменения, в зависимости от сигнала, генерируемого системой управления, частоты f, на которой работает генератор акустических волн.
Таким образом, достигается преимущество, состоящее в том, что предлагаемый способ обеспечивает возможность изменения в реальном времени положения объектов, например, в соответствии с их размером или природой.
Итак, предлагаемый способ сепарации полидисперсных частиц сможет быть реализован, например, посредством изменения частоты, на которой работает генератор акустических волн, и использования того обстоятельства, что частицы разных размеров имеют разную скорость релаксации в направлении узлов.
Указанный перенос объектов может иметь месть из первого положения, отличного от положения акустической фокусировки указанных объектов, во второе положение, отличное от первого, которое является положением акустической фокусировки указанных объектов. Такой перенос может, в частности, происходить в тех случаях, когда измерение, осуществляемое датчиком, выполняется в тот момент, когда объекты еще не подвергаются воздействию генерируемых акустических волн.
В соответствии с другим вариантом, перенос объектов вследствие изменения частоты f, на которой работает генератор акустических волн, может иметь место из первого положения акустической фокусировки указанных объектов во второе положение акустической фокусировки указанных объектов, причем указанное второе положение отлично от первого.
Изменение положения объектов может обеспечивать, когда текучая среда находится в состоянии истечения, избирательное направленное перемещение указанных объектов в сторону заданного выхода канала.
Говоря другими словами, предлагаемый способ может обеспечивать по меньшей мере в зависимости от результата измерения характеристики и/или положения объектов в канале, возможность изменения положения этих объектов.
Благодаря этапу переноса вследствие изменения частоты f, на которой работает генератор акустических волн, можно добиться, например, концентрирования в определенном положении объектов, которые, в частности, имеют практически одинаковые размеры.
Такой этап концентрирования можно, в частности, использовать в рамках реализации способа сортировки, конкретнее сортировки полидисперсных частиц.
За указанным этапом концентрирования может также следовать по меньшей мере одна химическая реакция, при этом указанная химическая реакция может обеспечить, в частности, возможность количественной оценки содержания и/или определения природы объектов.
Химическая реакция может иметь место, например, между по меньшей мере двумя соединениями, которые были сконцентрированы в одном и том же положении на этапе концентрирования.
Химическая реакция может происходить в канале, а конкретнее - в зоне действия акустического силового поля.
В соответствии с одной из модификаций, химическая реакция может происходить в ином месте, нежели канал. В этом случае объекты, сконцентрированные в рамках предлагаемого способа, могут избирательно направляться к выходу канала, например, с целью их последующего получения в какую-либо камеру. При этом химическая реакция сможет происходить в указанной камере. В соответствии с другим вариантом, камеру с объектами, сконцентрированными в рамках предлагаемого способа, можно будет перенести в какое-либо вспомогательное устройство, в котором будет находиться реагент, предназначенный для количественной оценки содержания и/или определения природы указанных объектов.
Как уже говорилось выше, датчик может быть помещен по меньшей мере за одним генератором акустических волн по направлению потока.
В этом случае предлагаемый способ может включать в себя следующие этапы:
- изменяют частоту, на которой работает генератор акустических волн, из множества частот,
- измеряют датчиком для каждой из указанных частот по меньшей мере одну характеристику и/или положение объектов,
- сравнивают значения, полученные для измерений, выполненных на каждой из указанных частот по меньшей мере с одним контрольным значением,
- выбирают из указанного множества частот одну частоту, для которой сравнение полученных значений с контрольным значением дает заданный результат,
- включают генератор акустических волн на работу на этой выбранной частоте.
Имеется возможность, например, измерить за генератором акустических волн по направлению потока плотность объектов и выбрать частоту, для которой может быть получена максимальная плотность. Целесообразно, чтобы способ согласно изобретению включал в себя этап выработки некоторой оптимальной частоты работы и управления генератором акустических волн, с тем чтобы он работал на этой оптимальной частоте.
Предусмотрена возможность неоднократного повтора этого этапа выработки в рамках предлагаемого способа или его использования всего один раз, либо возможность не использовать его вообще.
Изобретение касается также, отдельно или в сочетании со сказанным выше, способа получения по меньшей мере одного изображения находящихся в канале объектов, который включает в себя следующие этапы:
а) манипулируют объектами с использованием способа типа описанного выше с целью получения акустической фокусировки указанных объектов в заданной зоне канала,
б) освещают объекты в зоне акустической фокусировки с помощью системы освещения, и
в) получают с помощью системы получения по меньшей мере одно изображение освещенных таким образом указанных объектов.
Способ может включать в себя, например, этап получения по меньшей мере одного первого изображения объектов в первый момент и одного второго изображения объектов во второй момент.
Кроме того, в состав способа может быть включен этап расчета коэффициента корреляции распределений интенсивности света, полученных для этих первого и второго изображений.
Способ может представлять собой, в частности, способ измерения нормы, ориентации, и/или направления вектора скорости находящихся в канале объектов, освещаемых системой освещения.
В этом способе может быть использован, например, этап расчета одной из упомянутых выше величин на основе указанных выше первого и второго изображений.
Способ может представлять собой, например, способ цифровой трассерной визуализации по изображениям частиц (Particle Image Velocimetry).
Краткое описание чертежей
Сущность изобретения станет более понятной из чтения нижеследующего детального описания примеров его осуществления, не имеющих ограничительного характера, и рассмотрения приложенных чертежей, на которых:
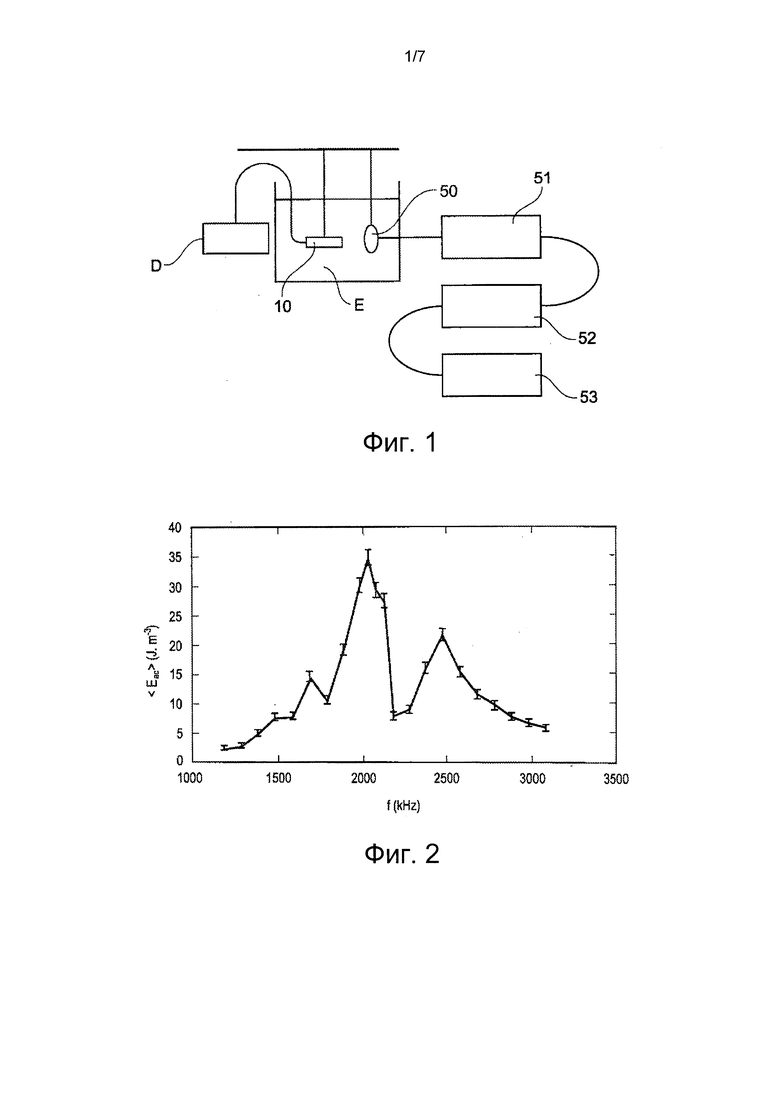
- фиг. 1 представляет собой частичную схематическую иллюстрацию примера выполнения опытного устройства, с помощью которого можно определять параметры широкополосного генератора акустических волн,
- фиг. 2 представляет собой частичную схематическую иллюстрацию примера сигнала, получаемого в широкополосном генераторе акустических волн,
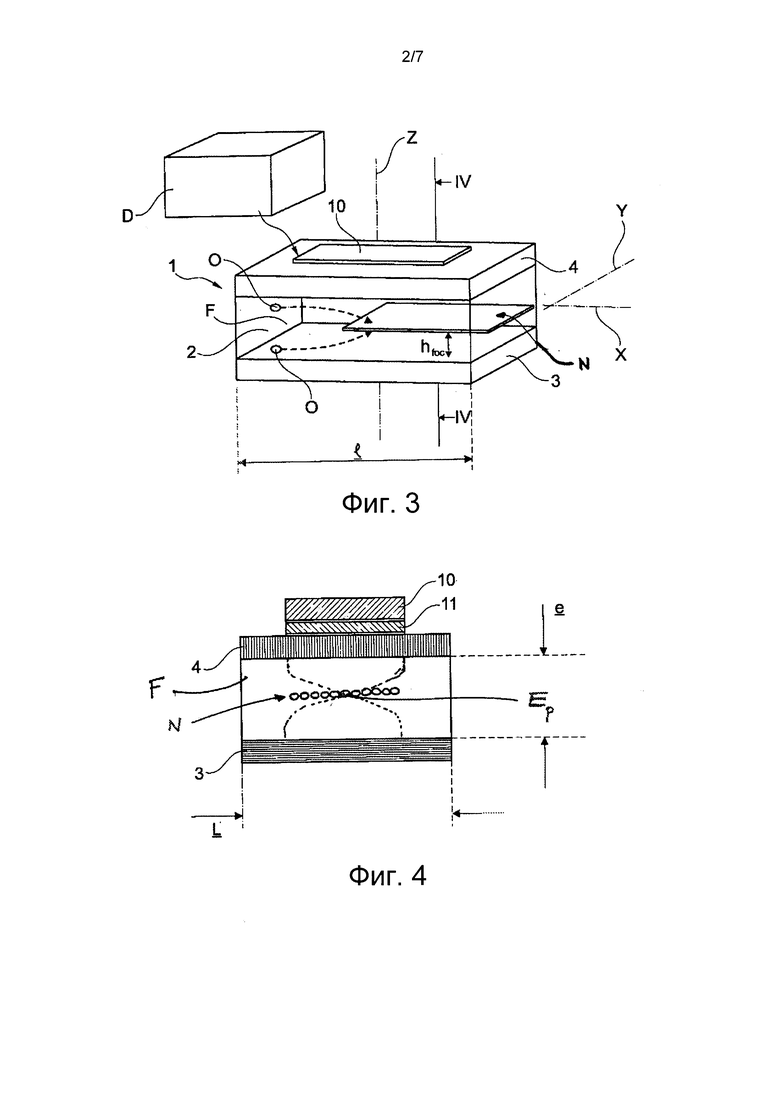
- фиг. 3 представляет собой частичную схематическую иллюстрацию примера выполнения устройства согласно изобретению,
- фиг. 4 представляет собой частичный схематический вид в разрезе по линии IV-IV устройства по фиг. 3,
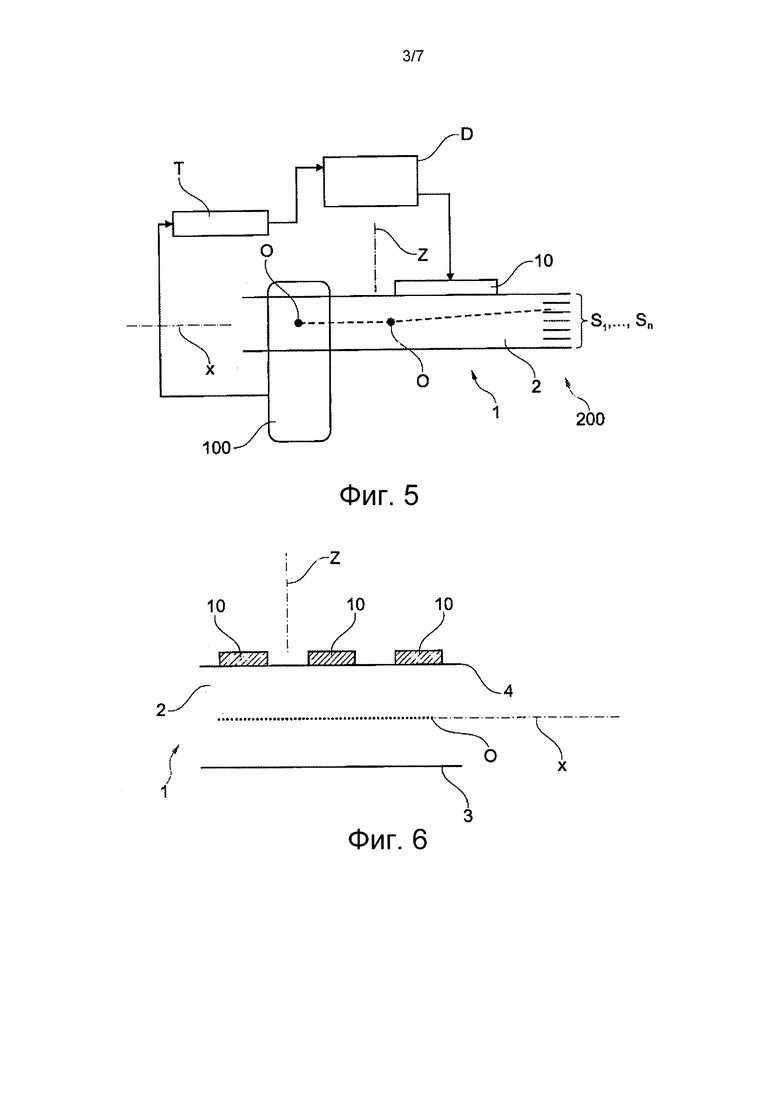
- фиг. 5-7 представляют собой частичные схематические иллюстрации различных вариантов осуществления изобретения,
- фиг. 8 иллюстрирует влияние частоты акустической волны на высоту фокусировки объектов в микроканале, и
- фиг. 9-13 иллюстрируют влияние различных параметров на акустическую фокусировку.
Протокол определения параметров широкополосного генератора акустических волн
Опытное устройство, детально рассматриваемое ниже и показанное на фиг. 1, позволяет выяснить, можно ли считать генератор акустических волн широкополосным.
Как видно на фиг. 1, генератор 10 акустических волн, работающий на данной рабочей частоте, помещен в заполненный водой резервуар Ε и питается синусоидальным напряжением от источника питания D. Амплитуда напряжения питания равна 10 В. Предусмотрена диафрагма 50 из полиэтилентерефталата (Mylar®), помещенная напротив генератора 10 акустических волн, причем диафрагма 50 располагается перпендикулярно к оси генератора 10 акустических волн. Выбор диафрагмы 50, в частности по ее толщине и отстоянию от генератора акустических волн, осуществляют таким образом, чтобы перемещение этой диафрагмы соответствовало перемещению частиц текучей среды вследствие генерации акустической волны. Иначе говоря, диафрагма 50 оказывает лишь пренебрежимо малое сопротивление потоку частиц текучей среды, который создается генерируемой акустической волной.
Лазерный луч (не показан) направляется на диафрагму 50 и отражается этой диафрагмой. Затем луч, отраженный диафрагмой 50, направляется на фотоприемник 51, который передает сигнал, пропорциональный принятой интенсивности света. Далее сигнал, получаемый на выходе фотоприемника 51, демодулируется в демодуляторе 52 с получением при этом напряжения, являющегося линейной функцией перемещения диафрагмы 50.
После этого производится численное дифференцирование этого напряжения по времени с использованием частоты дискретизации 5 Гц с помощью предусмотренного для этой цели устройства 53. Указанное численное дифференцирование может быть выполнено, например, какой-либо программой цифрового моделирования типа Matlab®.
В результате получают профиль скорости перемещения диафрагмы в зависимости от времени, после чего замеряют максимальное значение vo этого профиля скорости перемещения диафрагмы и усредняют его по 10-ти измерениям с получением при этом значения v'o. Далее из него выводят среднее значение <Еас> акустической энергии, определяемое по формуле
Для того чтобы выяснить, является ли генератор акустических волн широкополосным, выполняют количественное определение влияния изменения частоты, на которой работает генератор акустических волн, на величину <Еас>.
Затем повторно выполняют описанный выше протокол, изменяя рабочую частоту генератора акустических волн. При этом фиксируют получаемое значение <Еас> для разных значений частоты. Максимальное значение <Еас>max акустической энергии будет получено при номинальной рабочей частоте генератора акустических волн.
Считается, что генератор акустических волн является широкополосным, в тех случаях, когда достигается соотношение <Еас>/<Еас>max, превышающее или равное 15%, предпочтительнее превышающее или равное 40%, в частотном диапазоне [0,75 номинальной частоты генератора акустических волн; 1,25 номинальной частоты генератора акустических волн]. На фиг. 2 представлено изменение значения <Еас> в зависимости от частоты генератора акустических волн, наблюдаемое в указанных выше условиях эксплуатации.
В рассматриваемом примере полиэтилентерефталатовая диафрагма имеет толщину 12 мкм и отстоит от генератора акустических волн на расстояние 1 мм.
В примере, представленном на фиг. 2, в качестве генератора акустических волн использован выпускаемый компанией Signal Processing® преобразователь цилиндрической формы длиной 30 мм и диаметром 7 мм с номинальной рабочей частотой около 2 МГц.
Примеры устройств, используемых для реализации настоящего изобретения
На фиг. 3 показано устройство 1 согласно изобретению. Это устройство имеет нижнюю стенку 3 и верхнюю стенку 4, ограничивающие канал 2, в котором содержится текучая среда F. Текучая среда F может находиться в состоянии истечения, например в режиме ламинарного потока, или, в соответствии с другой модификацией, - в состоянии покоя.
В текучей среде F содержится множество объектов О, которые могут быть моно- или полидисперсными. Так, в частности, в качестве объектов О могут быть использованы биологические клетки, при этом текучая среда будет представлять собой какую-либо биологическую жидкость, например, кровь.
Имеется преобразователь 10, который, как здесь показано, закреплен на верхней стенке 4 устройства 1. В качестве преобразователя 10 использован преобразователь широкополосного типа.
В соответствии с одним из вариантов, преобразователь 10 может не быть широкополосным, если только он позволяет генерировать акустические волны на частоте f, отличной от резонансной частоты f0 канала 2 вдоль второй поперечной оси Z.
В предлагаемом устройстве 1 может быть использован, например, преобразователь цилиндрической формы длиной 30 мм и диаметром 7 мм с номинальной рабочей частотой порядка 2 МГц, выпускаемый компанией Signal Processing®.
Можно применить и преобразователь 10 иной формы, нежели цилиндрическая, в частности, имеющий форму параллелепипеда (см. фиг. 3).
На преобразователь 10 подается сигнал от генератора D, который может содержать или быть образован генератором сигнала, включенным последовательно с каскадом усиления напряжения. Генератор D подает на преобразователь 10 предпочтительно синусоидальный сигнал определенной частоты. В соответствии с другим вариантом, напряжение питания может иметь треугольную или прямоугольную форму.
В процессе работы преобразователь 10 позволяет получать акустическое силовое поле вдоль поперечной оси Ζ канала по толщине этого канала, обеспечивая тем самым фокусировку объектов О на высоте фокусировки hfoc. Как говорилось выше, высота фокусировки hfoc является функцией рабочей частоты преобразователя 10.
На фиг. 3 иллюстрируется возможность получения слоя N объектов О на высоте фокусировки hfoc. Этот слой N может формироваться на уровне экстремума Ер давления (узла или пучности), создаваемого преобразователем 10 (см. фиг. 4).
В примере, представленном на фиг. 3, стенка 3 выполнена из материала с высоким акустическим сопротивлением, то есть по меньшей мере в десять раз превышающим акустическое сопротивление текучей среды F. Следовательно, можно расположить стенку 3 напротив стенки 4, с которой генерируются акустические волны и которая выполнена из материала с высоким акустическим сопротивлением. О двух стенках можно говорить, что они находятся «напротив» друг друга, в тех случаях, когда они располагаются вдоль оси подачи акустических волн, которые генерируются преобразователем 10, работающим на частоте f, отличной от f0.
В соответствии с одним из вариантов осуществления, каждая из стенок 3 и 4 содержит, а конкретнее выполнена из материала с высоким акустическим сопротивлением.
Как видно на фиг. 4, между преобразователем 10 и верхней стенкой 4 может быть уложен слой геля 11, способствующий согласованию акустических сопротивлений.
Кроме того, на фиг. 4 проиллюстрировано формирование экстремума Ер давления в текучей среде F под действием акустических волн, генерируемых преобразователем 10. В рассматриваемом здесь примере слой N объектов О фокусируется на уровне экстремума Ер давления.
Слой N объектов О может быть сфокусирован на уровне узла давления, как здесь показано. В соответствии с одной из модификаций, которая здесь не иллюстрируется, слой N фокусируется на уровне пучности давления. В соответствии с еще одной модификацией, которая тоже не иллюстрируется, генерируемые акустические волны образуют множество экстремумов акустического давления, при этом каждый из двух отдельных раздельных слоев фокусируется на уровне одного отдельного экстремума давления. Соответственно, можно получить первый слой, фокусируемый в зоне первого экстремума давления, и второй слой, фокусируемый в зоне второго экстремума давления, отличного от первого.
На фиг. 5 приводится пример выполнения узла 200, в состав которого входят предлагаемое устройство 1 и датчик 100, обеспечивающий измерение по меньшей мере одной характеристики и/или положения находящихся в канале 2 объектов. Датчик 100 генерирует, на основе результата этого измерения, сигнал, подаваемый в систему Т управления. Эта система Т управления обеспечивает воздействие, в зависимости от сигнала, поступающего с датчика 100, на генератор D с целью изменения частоты, на которой работает преобразователь 10, и/или амплитуды генерируемых акустических волн.
Датчик 100 может обеспечивать, например, измерение плотности и/или размера объектов О.
Следствием генерации сигнала датчиком 100 может явиться управление преобразователем 10 с целью избирательного направления объектов О в зоне по меньшей мере одного из выходов (S1, …, Sn).
Датчик 100 может обеспечивать, например, измерение размера объектов О, для чего он может быть снабжен лазером и детектором, измеряющим интенсивность света, рассеиваемого находящимися в канале 2 объектами О.
В соответствии с одной из модификаций, датчик 100 может содержать, а конкретнее быть образован счетчиком Коултера, который подсчитывает количество объектов О и определяет их размер, или УФ детектором.
В соответствии с одним из примеров осуществления, можно формировать слои частиц или клеток, либо даже биологические мембраны, и направлять их к одному из выходов (S1, …, Sn).
На фиг. 6 дается пример выполнения устройства 1, содержащего множество преобразователей 10. Здесь преобразователи 10 располагаются вдоль канала 2 с одной и той же стороны от него.
В рамках настоящего изобретения можно также предусмотреть, чтобы преобразователи 10 были расположены по обе стороны от канала 2.
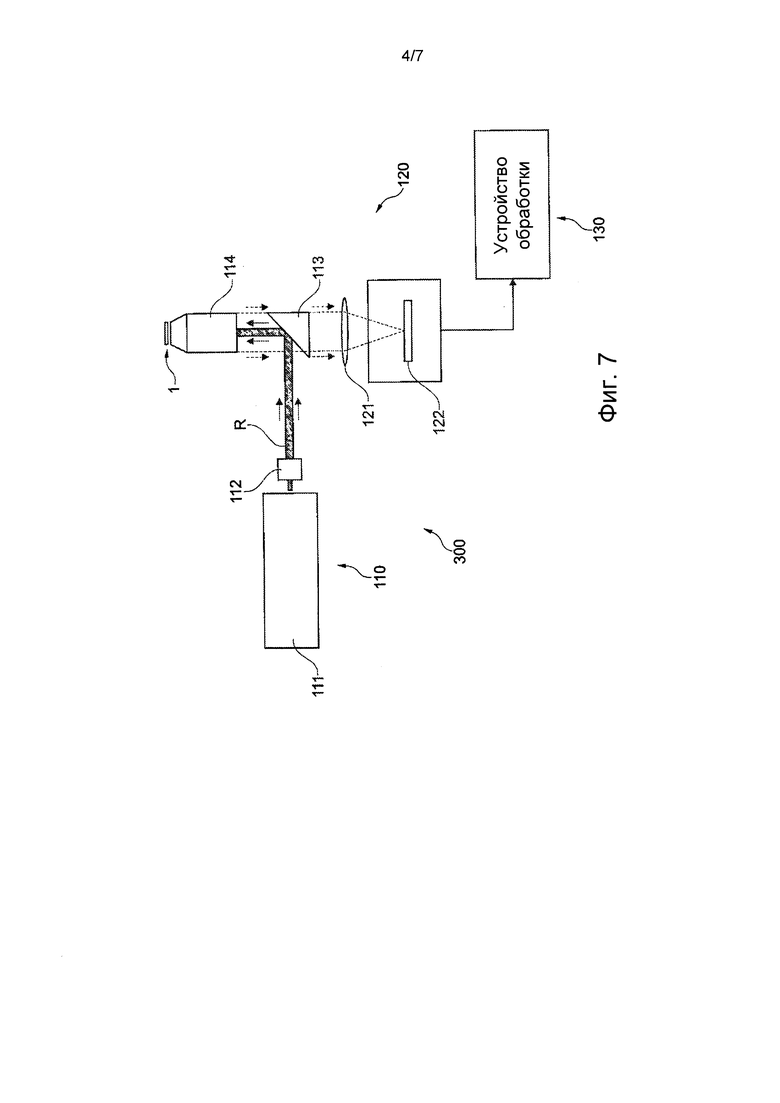
На фиг. 7 приведен пример выполнения предлагаемого согласно изобретению узла 300, который обеспечивает возможность получения изображения объектов О, находящихся в канале 2. В состав этого узла 300 входит устройство 1, связанное с системой 110 освещения и с системой 120 получения изображений.
Система 110 освещения включает в себя источник света 111, который может содержать, например, лазер, а конкретнее лазер Nd: YAG. В соответствии с одним из вариантов осуществления, источник света 111 может представлять собой комбинацию из двух импульсных лазеров Nd: YAG, а объекты О представляют собой флуоресцентные частицы, при этом лазеры Nd: YAG вырабатывают излучение с длиной волны 532 нм, поглощаемое объектами О.
На выходе источника света 111 может быть помещена оптическая структура 112, служащая для согласования его излучения с оптическим устройством.
Излучение R, создаваемое на выходе структуры 112, может направляться к отражающей структуре 113, с тем чтобы сфокусировать его в направлении линзы 114.
Сепаратор 113 может представлять собой комбинацию фильтра с дихроичным зеркалом. В качестве линзы 114 можно применить, например, линзу микроскопа, фокальная плоскость которой может располагаться практически на уровне зоны акустической фокусировки. Отражающую структуру 113 можно выбрать такой, чтобы не фильтровалось излучение с длиной волны, которая может поглощаться находящимися в канале 2 объектам О, например, когда используются флуоресцентные объекты.
Так, в частности, в случае, когда объекты О являются флуоресцентными, излучение R может поглощаться, а сами эти объекты могут вырабатывать излучение с иной длиной волны, например, большей.
Отражающую структуру 113 можно рассчитать таким образом, чтобы пропускалось, по существу, только повторно вырабатываемое объектами О излучение, направленное в сторону линзы 121.
Что касается устройства 120 получения изображений, то оно содержит линзу 121, которая обеспечивает фокусировку излучения от находящихся в канале 2 объектов О на датчике 122, который позволяет сформировать изображение указанных объектов О. В качестве датчика 122 можно использовать, например, камеру на ПЗС (приборах с зарядовой связью).
Датчик 122 может быть соединен, например, с устройством 130 обработки изображений, в состав которого может быть включен компьютер.
Устройство 130 обработки изображений может обеспечивать измерение нормы, и/или ориентации, и/или направления вектора скорости по меньшей мере части находящихся в канале 2 объектов О, освещаемых системой 110 освещения.
В случае съемки по меньшей мере двух изображений объектов О устройство 130 обработки обеспечивает возможность вычисления коэффициента корреляции распределений интенсивности света, получаемых для этих по меньшей мере двух изображений объектов О.
Примеры
Пример 1
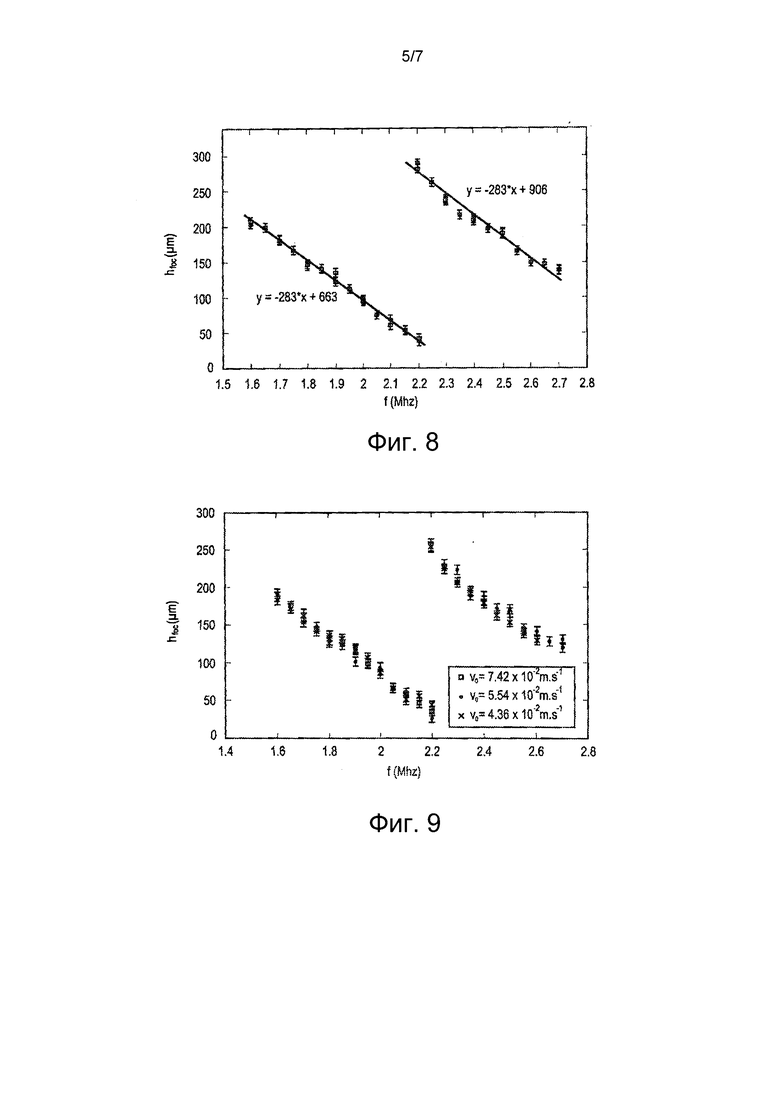
В качестве канала используется микроканал толщиной 337 мкм, шириной 10 мм и длиной 40 мм. Этот микроканал заполнен водой. Обе стенки этого микроканала, верхняя и нижняя, имеют форму пластин толщиной 1 мм, выполненных из РММА. Объекты представляют собой частицы полистирола диаметром 7 мкм с концентрацией 56 мг/л.
Канал подобного типа имеет два резонансных пика в районе 2 МГц и 2,5 МГц. В качестве генератора акустических волн использован выпускаемый компанией Signal Processing® цилиндрический преобразователь диаметром 7 мм и высотой 30 мм с номинальной рабочей частотой порядка 2 МГц. Генератор акустических волн закрепляется в зоне верхней стенки микроканала. Напряжение питания преобразователя равно 10 В.
На фиг. 8 иллюстрируется влияние рабочей частоты преобразователя на высоту hfoc фокусировки частиц. На этой диаграмме имеет место наложение кривых, полученных с использованием и без использования этапа повторной гомогенизации частиц в микроканале в период между подачами двух разных частот.
Пример 2: влияние акустической энергии
Имеют место те же рабочие режимы, что и в Примере 1, за исключением напряжения питания преобразователя, влияние которого здесь исследуется. Были проведены три опыта с напряжениями питания, соответственно, 5 В, 7 В и 10 В. На фиг. 9 приведены максимальные значения профиля скорости частиц текучей среды вследствие генерации акустической волны. Полученные результаты представлены на фиг. 9. Выясняется, что амплитуда акустической волны, управляемая напряжением питания преобразователя, не влияет на обнаруженное явление смещения высоты фокусировки объектов.
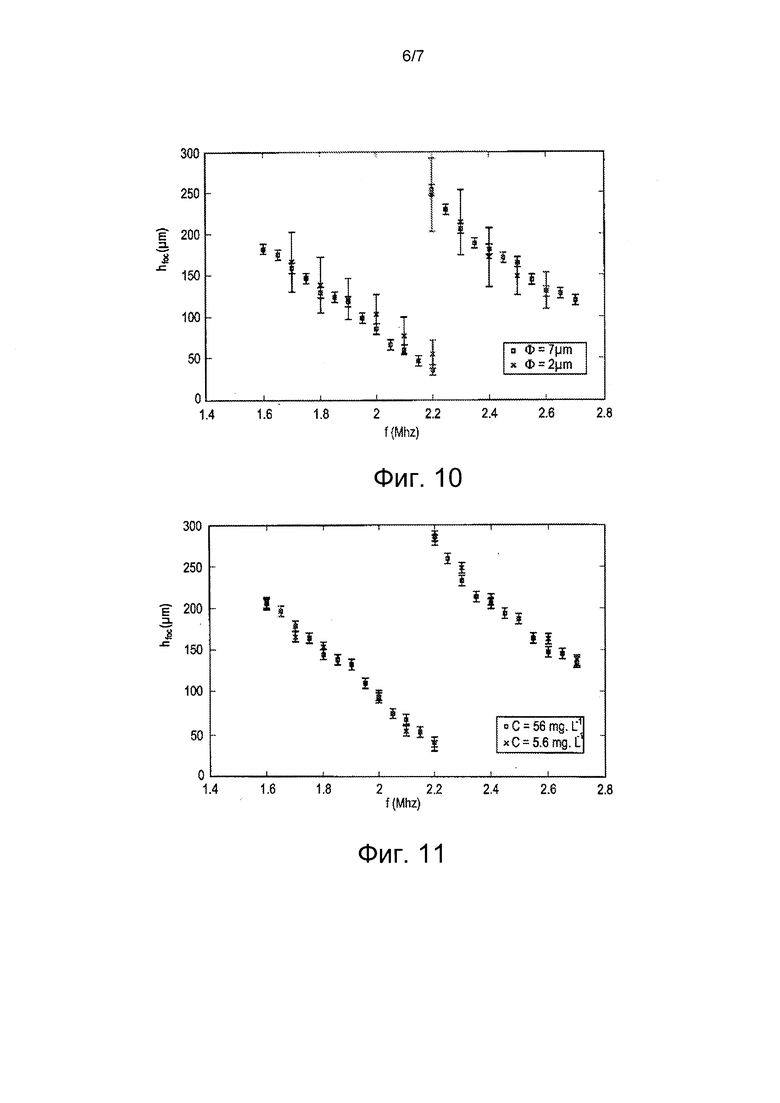
Пример 3: влияние размера объектов
Имеют место те же рабочие режимы, что и в Примере 1, за исключением диаметра частиц, влияние которого здесь исследуется. Были проведены два опыта с использованием частиц, соответственно, 2 мкм и 7 мкм. Полученные результаты представлены на фиг. 10. Выясняется, что диаметр используемых частиц не влияет на обнаруженное явление смещения высоты фокусировки объектов.
Пример 4: влияние концентрации объектов
Имеют место те же рабочие режимы, что и в Примере 1, за исключением концентрации объектов, влияние которой здесь исследуется. Были проведены два опыта с использование частиц с концентрацией, соответственно, 5,6 мг/л и 56 мг/л. Полученные результаты представлены на фиг. 11. Выясняется, что концентрация частиц не влияет на обнаруженное явление смещения высоты фокусировки объектов.
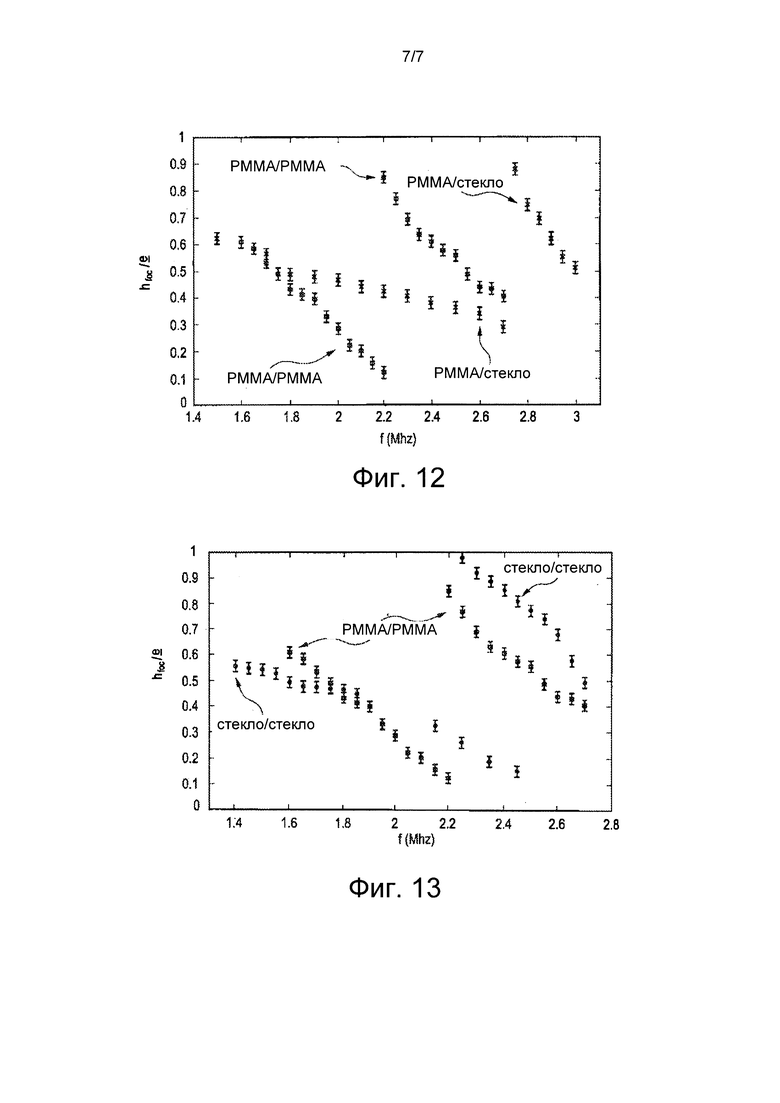
Пример 5: влияние материала стенок
Имеют место те же рабочие режимы, что и в Примере 1, за исключением природы материалов, из которых выполнены верхняя и нижняя стенки, влияние которой здесь исследуется. Кроме того, толщина микроканала каждый раз приводилась в соответствие с природой материалов указанных стенок. Полученные результаты представлены на фиг. 12 и 13.
Обозначение «РММА/РММА» соответствует каналу, у которого верхняя и нижняя стенки выполнены из РММА. Обозначение «РММА/стекло» соответствует каналу, у которого верхняя стенка выполнена из РММА, а нижняя - из стекла. Обозначение «стекло/стекло» соответствует каналу, у которого верхняя и нижняя стенки выполнены из стекла.
Выражение «содержащий…» следует понимать как «содержащий по меньшей мере один (одну)…».
Если не оговорено иное, выражение «находящийся(аяся) в пределах до…» следует понимать в смысле «включая предельные значения».
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА И СПОСОБЫ ДЛЯ ВЫСОКОПРОИЗВОДИТЕЛЬНОЙ СОРТИРОВКИ СПЕРМЫ | 2013 |
|
RU2627379C2 |
| УСТАНОВКА И СПОСОБЫ ДЛЯ ВЫСОКОПРОИЗВОДИТЕЛЬНОЙ СОРТИРОВКИ СПЕРМЫ | 2017 |
|
RU2727679C2 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ВЫСОКОТОЧНОГО ИЗМЕРЕНИЯ ФИЗИКО-ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТА | 2007 |
|
RU2353925C1 |
| ОТСЛЕЖИВАНИЕ ОБЪЕКТОВ В ТРУБОПРОВОДАХ | 2009 |
|
RU2515126C2 |
| Сканирующий акустический микроскоп | 2019 |
|
RU2735916C1 |
| ТЕХНОЛОГИЯ СЕПАРАЦИИ С ПОМОЩЬЮ АКУСТОФОРЕЗА, ИСПОЛЬЗУЮЩАЯ МНОГОМЕРНЫЕ СТОЯЧИЕ ВОЛНЫ | 2013 |
|
RU2649051C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ВЫПОЛНЕНИЯ ИСПЫТАНИЙ ДЛЯ ОПРЕДЕЛЕНИЯ ПЛАСТОВОГО НАПРЯЖЕНИЯ НА НЕОБСАЖЕННОМ УЧАСТКЕ СТВОЛА СКВАЖИНЫ | 2019 |
|
RU2761075C1 |
| КОМПЛЕКС ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ И ОПТИЧЕСКОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО КОМПЛЕКСА | 2012 |
|
RU2515957C1 |
| ЭЛЕМЕНТ ДЛЯ ТАНГЕНЦИАЛЬНОЙ СЕПАРАЦИИ, СОДЕРЖАЩИЙ ВСТРОЕННЫЕ ПРЕПЯТСТВИЯ ДЛЯ ПОТОКА, И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2015 |
|
RU2693159C2 |
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ ФИЗИЧЕСКИХ ПАРАМЕТРОВ ДВУХФАЗНОЙ СМЕСИ С ПОМОЩЬЮ РАСПРОСТРАНЕНИЯ АКУСТИЧЕСКОЙ ВОЛНЫ В НЕПРЕРЫВНОЙ ФАЗЕ ДВУХФАЗНОЙ СМЕСИ | 1999 |
|
RU2237891C2 |
Изобретение относится к устройству (1), предназначенному для манипулирования объектами (О), находящимися в канале (2) внутри текучей среды (F), в частности жидкости. Устройство включает в себя - канал (2), идущий вдоль продольной оси (X), причем канал (2) имеет поперечное сечение с шириной (L), измеренной вдоль первой поперечной оси (Y), и толщиной (е), измеренной вдоль второй поперечной оси (Z), перпендикулярной к первой. Ширина (L) больше толщины (е) или равна ей и канал имеет располагающиеся вдоль второй поперечной оси (Z) первую (3) и вторую (4) стенки. Устройство содержит генератор (10) акустических волн, генерирующий акустические волны в канале по меньшей мере от одной из указанных стенок (3; 4), причем указанный генератор (10) акустических волн работает на частоте f, отличной от резонансной частоты f0 канала (2) вдоль второй поперечной оси (Z). В результате происходит формирование по меньшей мере одного слоя (N) объектов посредством акустической фокусировки. Технический результат: возможность менять положение фокусировки объектов внутри канала, возможность фокусировки объектов по всему размеру канала. 8 н. и 19 з.п. ф-лы, 5 пр., 13 ил.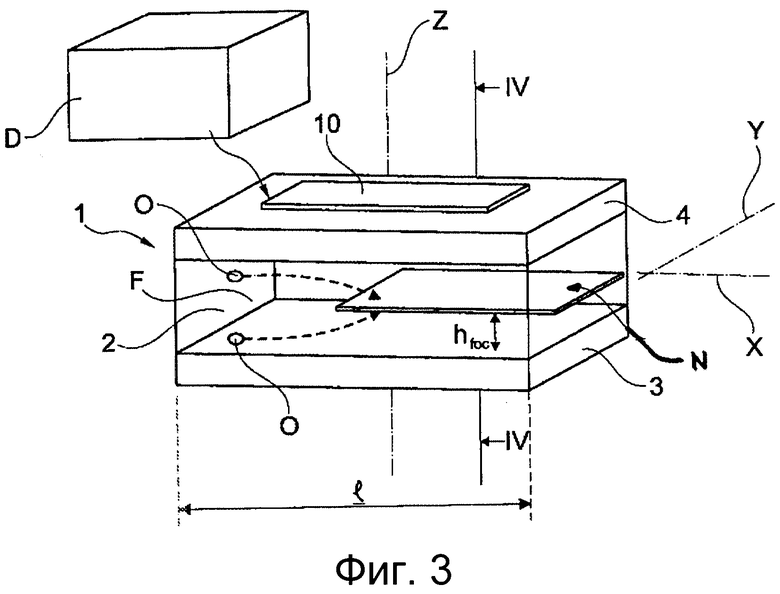
1. Устройство (1), предназначенное для манипулирования объектами (О), находящимися в канале (2) внутри текучей среды (F), в частности жидкости, включающее в себя:
- канал (2), проходящий вдоль продольной оси (X), причем канал (2) имеет поперечное сечение с шириной (L), измеренной вдоль первой поперечной оси (Y), и толщиной (е), измеренной вдоль второй поперечной оси (Z), перпендикулярной к первой оси, причем ширина (L) больше толщины (е) или равна ей, и канал имеет расположенные вдоль второй поперечной оси (Z) первую (3) и вторую (4) стенки,
- генератор (10) акустических волн, генерирующий акустические волны в канале от по меньшей мере одной из указанных стенок (3; 4),
причем указанный генератор (10) акустических волн работает на частоте f, отличной от резонансной частоты f0 канала (2) вдоль второй поперечной оси (Z), и происходит формирование по меньшей мере одного слоя (N) объектов (О) посредством акустической фокусировки.
2. Устройство (1) по п. 1, в котором канал (2) имеет на по меньшей мере части его длины, в частности, на всей его длине толщину (е) менее 3 см, в частности менее 1 см, при этом канал (2) предпочтительно является микроканалом.
3. Устройство (1) по п. 1, в котором канал (2) имеет на по меньшей мере части его длины, в частности на всей его длине, по существу, прямоугольное поперечное сечение.
4. Устройство (1) по п. 1, включающее в себя множество генераторов (10) акустических волн, выполненных с возможностью размещения вдоль канала, с возможностью генерации в канале акустических волн по меньшей мере от одной из двух стенок (3; 4), причем указанные генераторы (10) акустических волн располагаются в частности с одной и той же стороны от канала (2).
5. Устройство (1) по п. 1, в котором по меньшей мере одна из стенок (3; 4), а предпочтительно обе, включают в себя, а в частности выполнены из материала, выбираемого из следующего: минеральные или органические стекла, термопластичные материалы, в частности РММА или поликарбонат, кварц, металлы, у которых произведение (плотность металла × скорость звука в металле) больше или равно 106 Па⋅с/м.
6. Устройство (1) по п. 1, в котором по меньшей мере одна из стенок (3; 4), а предпочтительно обе, включают в себя, в частности выполнены из материала с акустическим сопротивлением, по меньшей мере в десять раз превышающим акустическое сопротивление текучей среды.
7. Устройство (1) по п. 6, в котором стенка (3; 4), находящаяся напротив той, с которой генератор (10) акустических волн генерирует акустические волны, включает в себя, в частности, выполнена из материала с акустическим сопротивлением по меньшей мере в десять раз превышающим акустическое сопротивление текучей среды.
8. Устройство (1) по п. 1, в котором генерируемые акустические волны формируют в текучей среде (F) по меньшей мере один экстремум (Ер) акустического давления.
9. Устройство (1) по п. 8, в котором слой (N) объектов (О) фокусирован на уровне экстремума (Ер) акустического давления.
10. Устройство (1) по п. 1, в котором генератор (10) акустических волн работает на частоте f, меньшей или равной 10 МГц, в частности - в пределах от 0,5 до 10 МГц.
11. Устройство (1) по п. 1, в котором генератор (10) акустических волн работает на частоте f, отличной от f0 и находящейся в пределах от 0,75f0 до 1,25f0, а точнее - от 0,75f0 до 0,95f0 или от 1,05f0 до 1,25f0.
12. Устройство (1) по п. 1, в котором канал (2) включает в себя множество выходов (S1, …, Sn), к которым избирательно направляют объекты (О) в соответствии с частотой f, на которой работает генератор (10) акустических волн.
13. Устройство (1) по п. 1, в котором канал (2) имеет такую длину (I), измеренную вдоль его продольной оси (X), что отношение длины к толщине больше или равно 10.
14. Узел (200) для манипулирования объектами (О), находящимися в канале (2) внутри текучей среды (F), включающий в себя:
- устройство (1) по п. 1,
- датчик (100) с возможностью использования для измерения по меньшей мере одной характеристики и/или положения находящихся в канале (2) объектов (О), причем в результате этого измерения указанный датчик (100) генерирует сигнал, и
- систему (Т) управления, которая принимает указанный сигнал и управляет частотой f, на которой работает генератор (10) акустических волн, и/или амплитудой генерируемых акустических волн в зависимости от указанного сигнала.
15. Узел (300) для манипулирования объектами (О), находящимися в канале (2) внутри текучей среды (F), включающий в себя:
- устройство (1) по п. 1,
- систему (110) освещения, сконфигурированную с возможностью освещения по меньшей мере некоторых находящихся в канале (2) объектов (О), и
- систему (120) получения изображений, сконфигурированную с возможностью получения по меньшей мере одного изображения по меньшей мере некоторых объектов (О), находящихся в канале (2) и освещаемых системой (110) освещения,
причем указанный узел включает в себя, в частности, устройство (130) обработки по меньшей мере одного изображения, полученного системой (120) получения.
16. Узел по п. 15, в котором устройство (130) обработки обеспечивает измерение нормы, и/или ориентации, и/или направления вектора скорости по меньшей мере некоторых находящихся в канале (2) объектов (О), освещаемых системой (110) освещения.
17. Узел (300) по п. 16, в котором система (110) освещения сконфигурирована с возможностью освещения всего слоя или части слоя (N) объектов (О), полученного в результате акустической фокусировки.
18. Способ манипулирования объектами (О), находящимися в канале (2), с помощью генератора (10) акустических волн с использованием устройства (1) по п. 1 или узла по п. 17, причем в указанном способе:
- указанный канал (2) проходит вдоль продольной оси (X) и имеет поперечное сечение с шириной (L), измеренной вдоль первой поперечной оси (Y), и толщиной (е), измеренной вдоль второй поперечной оси (Z), перпендикулярной к первой, при этом ширина (L) больше толщины (е) или равна ей и канал имеет располагающиеся вдоль второй поперечной оси (Z) первую (3) и вторую (4) стенки, и
- указанный генератор (10) акустических волн генерирует акустические волны в канале от по меньшей мере одной из указанных стенок (3; 4) и работает на частоте f, отличной от резонансной частоты f0 канала (2) вдоль второй поперечной оси (Z).
19. Способ по п. 18, в соответствии с которым частота f отлична от f0 и находится в пределах от 0,75f0 до 1,25f0, в частности - от 0,75f0 до 0,95f0 или от 1,05f0 до 1,25f0.
20. Способ по п. 19, в котором:
- измеряют с помощью датчика (100) по меньшей мере одну характеристику и/или положение объектов (О), находящихся в канале (2),
- генерируют сигнал в зависимости от результата измерения, сделанного указанным датчиком (100), и отправляют его в систему (Т) управления, и
- изменяют частоту f, на которой работает генератор (10) акустических волн, и/или амплитуду генерируемых акустических волн в зависимости от указанного сигнала посредством воздействия системы (Т) управления.
21. Способ получения по меньшей мере одного изображения находящихся в канале (2) объектов (О), включающий в себя следующие этапы:
a) манипулируют объектами (О) с использованием способа по п. 20 с целью получения акустической фокусировки указанных объектов (О) в заданной области канала (2),
b) освещают объекты (О) в области акустической фокусировки с помощью системы (110) освещения, и
c) получают с помощью системы (120) получения по меньшей мере одно изображение указанных объектов (О), освещенных таким образом.
22. Способ измерения нормы вектора скорости объектов (О), и/или ориентации вектора скорости объектов (О), и/или направления вектора скорости объектов (О), находящихся в канале (2), включающий в себя следующие этапы:
- получают первое изображение объектов (О) в первый момент с использованием способа по п. 21,
- получают второе изображение объектов (О) во второй момент с использованием способа по п. 21, и
- вычисляют на основе первого и второго изображений норму, и/или ориентацию, и/или направление вектора скорости объектов (О)
23. Способ по п. 22, отличающийся тем, что его используют по меньшей мере для одного из следующих применений: цифровой трассерной визуализации по изображениям частиц (PIV), в частности цифровой трассерной визуализации по изображениям микрометрических частиц (micro-PIV), методов сортировки препаратов, например, жестких или деформируемых частиц, полидисперсных частиц, биологических клеток, конкретнее клеток крови, например раковых клеток, содержащихся в пробе крови или кровяных шариков, бактерий, коллоидных или неколлоидных эмульсий, белков, липосом, методов диагностики или анализа, методов очистки, обогащения или обеднения препаратов, методов синтеза препаратов, методов изменения физических или химических характеристик препаратов, методов исследования лекарственных средств, методов смешивания или методов измерения коэффициента диффузии.
24. Способ по п. 23, в котором объекты (О) представляют собой моно- или полидисперсные биологические клетки, в частности клетки крови, в частности кровяные шарики.
25. Устройство (1), предназначенное для манипулирования объектами (О), находящимися в канале (2) внутри текучей среды (F), в частности жидкости, включающее в себя:
- канал (2), идущий вдоль продольной оси (X), причем канал (2) имеет поперечное сечение с шириной (L), измеренной вдоль первой поперечной оси (Y), и толщиной (е), измеренной вдоль второй поперечной оси (Z), перпендикулярной к первой, при этом ширина (L) больше толщины (е) или равна ей и канал имеет располагающиеся вдоль второй поперечной оси (Z) первую (3) и вторую (4) стенки,
- генератор (10) акустических волн, генерирующий акустические волны в канале от по меньшей мере одной из указанных стенок (3; 4),
причем указанный генератор (10) акустических волн работает на частоте f, отличной от резонансной частоты f0 канала (2) вдоль второй поперечной оси (Z),
при этом первая и вторая стенки включают в себя материал с акустическим сопротивлением, по меньшей мере в десять раз превышающим акустическое сопротивление текучей среды.
26. Устройство (1), предназначенное для манипулирования объектами (О), находящимися в канале (2) внутри текучей среды, в частности жидкости, содержащее:
- канал (2), идущий по продольной оси (X), причем канал (2) имеет поперечное сечение с шириной (L), измеренной вдоль первой поперечной оси (Y), и толщиной (е), измеренной вдоль второй поперечной оси (Z), перпендикулярной к первой, при этом ширина (L) больше толщины (е) или равна ей и канал имеет располагающиеся вдоль второй поперечной оси (Z) первую (3) и вторую (4) стенки,
- генератор (10) акустических волн, генерирующий акустические волны в канале по меньшей мере от одной из указанных стенок (3; 4),
причем указанный генератор (10) акустических волн работает на частоте f, отличной от резонансной частоты f0 канала (2) вдоль второй поперечной оси (Z) и находящейся в пределах от 0,75f0 до 1,25f0, а точнее - от 0,75f0 до 0,95f0 или от 1,05f0 до 1,25f0.
27. Устройство (1) по п. 26, дополнительно характеризующееся любым из признаков, упомянутых в п. 2.
| US 2008217259 A1, 11.09.2008 | |||
| US 2010078384 A1, 01.04.2010 | |||
| US 5225089 A, 06.07.1993 | |||
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ВАРИКОЗНОГО РАСШИРЕНИЯ ВЕН | 1990 |
|
RU2072234C1 |
| СПОСОБ И УСТРОЙСТВО МАНИПУЛИРОВАНИЯ МИКРОНОСИТЕЛЯМИ ДЛЯ ИХ ИДЕНТИФИКАЦИИ | 2001 |
|
RU2285265C2 |
| Пластилин | 1979 |
|
SU773055A1 |
| WO 0229400 A2, 11.04.2002. | |||

