Настоящая группа изобретений относится к отслеживанию объектов в каналах и, в частности, к отслеживанию объектов, например, устройства чистки или обследования, например снарядов, в трубопроводах.
Трубопроводы являются наиболее экономически эффективным средством транспортировки текучих сред, обычно нефти и газа, но существуют и другие типы трубопроводов. В настоящее время существует обширная трубопроводная инфраструктура, предназначенная для сбора, транспортировки и распределения этих природных ресурсов, причем только в США проложено свыше трех четвертей миллиона километров нефте- и газопроводов. Поддержание безукоризненной работы этих трубопроводов имеет первостепенную важность, поскольку их отказы приводят к масштабным экономическим потерям, ущербу для окружающей среды, а также потенциально катастрофическим физическим повреждениям.
По этой причине прилагаются значительные усилия для обслуживания, мониторинга и обследования трубопроводов. Однако абсолютный размер многих трубопроводных сетей и тот факт, что многие километры трубопроводов состоят из подземных и подводных установок, делает эффективный и экономичный мониторинг трудной задачей.
Для мониторинга, обследования и обслуживания трубопроводов применяются различные инструменты обследования и обслуживания, которые вводятся в трубопровод и переносятся по трубопроводу под действием давления текучей среды в нем. Существуют различные объекты, обычно именуемые "снарядами", которые можно применять. Простой чистящий снаряд может содержать объект в форме щетки или скребка для проводки внутренних стенок трубопровода при его прохождении для обеспечения чистящего действия. Интеллектуальный снаряд мониторинга может содержать различные датчики и встроенный процессор и может быть очень дорогостоящим, очень сложным прибором.
Снаряды также обычно используются при вводе трубопровода в эксплуатацию, например для удаления обломков изнутри трубопровода и для осушения внутреннего пространства трубопровода.
Использование снаряда для обследования или чистки обычно называется проводкой. Проводка часто осуществляется, по большей части, непрерываемым потоком текучей среды в трубопроводе и, таким образом, имеет преимущество в том, что поток в трубопроводе не нужно останавливать для осуществления рутинного обследования и обслуживания. Однако время от времени снаряды могут застревать в трубопроводе. Это может происходить по многим причинам, например чистящий снаряд может скрести стенки трубопровода для их очистки от любого материала. В нефтепроводе, например, может происходить нарост различных углеводородных продуктов, например, восковых или полутвердых осадков. Область чрезмерного нароста осадков может создавать слишком большое препятствие для снаряда. Кроме того, при нормальной работе обломки, образующиеся при действии чистки, накапливаются перед снарядом и в ряде случаев могут блокировать прохождение снаряда. Повреждение трубопровода, например образование вмятин и вспучиваний, также может приводить к изменению внутренних размеров, что затрудняет прохождение снаряда.
Снаряд, застрявший в трубопроводе, очевидно, приводит к сильному повреждению трубопровода. Снаряд может полностью или частично перекрыть поток, что может привести к заглушению трубопровода. Очевидно, желательно как можно скорее ликвидировать такую заглушку. Простой трубопровода может привести к значительным материальным потерям, и нарушение снабжения, в некоторых приложениях, может иметь значительные косвенные последствия. Кроме того, как упомянуто выше, некоторые снаряды обследования очень дорого стоят, и выход из строя такого снаряда сам по себе является значительной потерей.
Для ликвидации заглушения может потребоваться фактически врезаться в трубопровод и удалить застрявший снаряд. Однако очевидно, что необходимо установить, что снаряд застрял. Тот факт, что снаряд является причиной заглушения, можно установить с помощью устройства мониторинга потока, но оно не всегда позволяет определить, движется ли снаряд, хотя бы медленно, или же снаряд прекратил движение. Для простого снаряда чистящего типа типичный прогон проводки может предусматривать просто ввод снаряда в точке ввода снаряда в трубопроводе и затем его извлечение в точке извлечения, находящейся ниже по течению, некоторое время спустя. Определить, что снаряд застрял, можно только в том случае, когда снаряд не появляется в точке извлечения на протяжении определенного временного окна после его ввода. Кроме того, если определено, что снаряд застрял, необходимо установить фактическое положение снаряда в трубопроводе. Для снаряда без каких-либо датчиков или передатчиков определение положения заглушения может представлять сложную задачу с учетом того, что трубопровод может быть заглублен и может иметь многокилометровую длину.
Таким образом, задачей настоящего изобретения является обеспечение способов и устройства для отслеживания и/или определения положения объектов, движущихся в канале.
В первом аспекте настоящее изобретение предусматривает способ отслеживания движения объекта в канале, содержащий этапы, на которых: собирают данные, соответствующие сигналам отклика из опроса оптического волокна, расположенного вдоль пути канала, для обеспечения распределенного акустического измерения; и обрабатывают отклики от каждого из совокупности дискретных продольных измерительных участков для регистрации акустической сигнатуры, связанной с движением объекта в канале, и определения источника акустической сигнатуры.
Способ согласно этому аспекту настоящего изобретения предусматривает использование распределенного акустического измерения для обеспечения отслеживания объекта в канале, например отслеживания снаряда в трубопроводе. Оптоволоконное распределенное акустическое измерение является известным методом, согласно которому колебания оптического волокна регистрируются за счет опрашивания волокна светом и регистрации изменений пропущенного или отраженного света вследствие колебаний. Сигнал анализируется, благодаря чему волокно фактически обеспечивает последовательность независимых акустических датчиков, распределенных по длине волокна. Во многих вариантах осуществления волоконно-оптическое распределенное акустическое измерение обеспечивается путем опрашивания волокна оптическими импульсами на разных частотах. Такие варианты осуществления обычно предусматривают регистрацию света, претерпевшего рэлеевское обратное рассеяние из измерительного волокна и использование частотного соотношения опрашивающих импульсов для определения акустических сигналов, падающих на волокно на протяжении его длины. Однако можно применять любой подходящий метод распределенного измерения.
Такие распределенные волоконно-оптические датчики были предложены для мониторинга периметра, а также мониторинга нефте- и газопроводов, например, для обнаружения проводимых поблизости земляных работ, которые могут угрожать трубопроводу.
Настоящее изобретение предусматривает использование характерной сигнатуры, обусловленной движением объекта в канале, для обеспечения возможности регистрации и, следовательно, отслеживания объекта. Таким образом, настоящее изобретение не предусматривает использование датчика самого громкого типа, что является нормальным подходом для акустического слежения, но, напротив, предусматривает использование акустической сигнатуры для регистрации и отслеживания объекта.
Удобно, чтобы на этапе регистрации акустической сигнатуры регистрировали импульс давления, вызванный перемещением объекта в канале. Было обнаружено, что снаряд, перемещающийся по трубопроводу, может порождать последовательность импульсов давления. Когда снаряд проходит каждый кольцевой сварной шов или соединение в трубе, он встречает дополнительное сопротивление, и позади снаряда создается небольшое избыточное давление. После прохождения снарядом сварного шва возбуждается волна давления, распространяющаяся в обоих направлениях по трубе. Частота импульсов зависит от расстояния между сварными швами и скорости снаряда. Аналогичный эффект может иметь место при прохождении через некоторые клапаны. В общем случае любое изменение внутренних свойств канала, которое может создавать повышенное сопротивление движению объекта, может приводить к избыточному давлению, при спуске которого может возникать импульс давления. При наличии в канале нескольких положений, где возникает импульс давления, например, совокупности соединений между секциями канала, прохождение объекта будет порождать повторяющуюся последовательность импульсов давления. Как упомянуто выше, частота импульса в трубопроводном приложении может зависеть от скорости снаряда и частоты сварных швов, соединений, клапанов и т.д. Если снаряд перемещается с примерно постоянной скоростью, и соединения разнесены равномерно, движение снаряда будет создавать регулярную последовательность импульсов давления, которую можно использовать в качестве акустической сигнатуры. Таким образом, положение снаряда можно определить, установив местоположение акустического возмущения в одном из дискретных измерительных участков волокна, которое может совпадать с последовательностью предыдущих импульсов.
Предпочтительно, на этапе регистрации акустической сигнатуры регистрируют волну давления, распространяющуюся по каналу, обусловленную импульсом давления, вызванным перемещением объекта в канале. Как упомянуто выше, импульс давления создает волну давления, распространяющуюся в обоих направлениях в канале. Импульс давления может распространяться на значительные расстояния, особенно в трубопроводах высокого давления и т.п. Таким образом, акустическая сигнатура может содержать первое и второе акустические возмущения, распространяющиеся друг от друга в противоположных направлениях в канале. Другими словами, если импульс давления обусловлен, например, пересечением снарядом сварного шва в первом положении, это приведет, в первом кадре данных, к акустическому возмущению на измерительном участке волокна, соответствующем первому положению. В следующем кадре акустическое возмущение можно регистрировать на обоих соседних измерительных участках волокна. В следующем за ним кадре акустическое возмущение можно регистрировать на следующих участках волокна в каждом направлении и т.д. На основании этого характеристического распространяющегося возмущения можно идентифицировать снаряд даже при наличии сравнительно высокого шума. По мере распространения волны давления по каналу акустическое возмущение регистрируется совокупностью измерительных участков волокна, и отклики из совокупности дискретных измерительных участков можно использовать для регистрации объекта.
Идентификация первого и второго акустических возмущений, распространяющихся в противоположных направлениях, также позволяет определять положение источника волны давления, таким образом определяя положение объекта в канале в момент генерации волны давления. Использование волны давления, генерируемой в канале, например трубопроводе, для определения положения объекта в канале представляет новый аспект этого варианта осуществления изобретения.
Скорость распространения волны давления в канале зависит от текучей среды в канале и давления текучей среды. Обычно скорость волны давления вдоль канала одинакова в обоих направлениях, и, следовательно, первое и второе акустические возмущения имеют, по существу, одинаковую скорость. Таким образом, способ позволяет выявлять акустические возмущения, вызванные объектом, удостоверяясь в том, что первое и второе акустические возмущения имеют, по существу, одинаковую скорость вдоль канала.
Таким образом, способ может содержать идентификацию первого и второго акустических возмущений, распространяющихся в разных направлениях вдоль канала от точки общего источника. На графике каскадного типа, где время отложено по одной оси, и позиция вдоль канала - по другой оси, и указана интенсивность акустических возмущений, волна давления изображается в виде характерной V-образной формы - поскольку волны давления распространяются в противоположных направлениях вдоль трубопровода с, по существу, постоянной скоростью. Эта V-образная форма представляет акустическую сигнатуру объекта, и ее можно использовать для регистрации и определения положения объекта.
В одном варианте осуществления на этапе обработки откликов для каждой из совокупности испытательных позиций вдоль канала: формируют первый поднабор данных, соответствующих совокупности кадров данных из дискретных измерительных участков, соответствующий участкам канала с одной стороны от испытательной позиции; формируют второй поднабор данных, соответствующих совокупности кадров данных из дискретных измерительных участков, соответствующий участкам канала с другой стороны от испытательной позиции; и обрабатывают первый и второй поднаборы для определения наличия акустического возмущения в первом и втором поднаборах, распространяющегося от испытательной позиции.
Другими словами способ предусматривает предположение, для каждого из совокупности испытательных положений вдоль канала, что такое испытательное положение является положением источника импульса давления. Способ можно осуществлять последовательно или параллельно для каждого испытательного положения. Для каждого испытательного положения формируются первый и второй поднаборы данных, представляющие отклики из измерительных участков волокна на первой и второй сторонах испытательного положения, соответственно. Затем каждый поднабор обрабатывается для определения, существует ли акустическое возмущение, распространяющееся от испытательного положения.
Удобно, чтобы количество кадров данных было достаточно велико, чтобы можно было регистрировать акустические возмущения, если таковые присутствуют, но достаточно мало, чтобы в каждом поднаборе можно было ожидать только одну волну давления. Используемый здесь термин «кадр данных» означает набор данных откликов, соответствующих конкретному периоду времени, либо единичному опросу волокна, либо объединенные результаты нескольких опросов. Таким образом, выбирается достаточно короткий период, чтобы можно было предполагать, что объект возбуждает только одну волну давления в течение такого периода.
При надлежащем выборе данных для каждого из первого и второго поднаборов данных этап определения наличия или отсутствия акустического возмущения соответствует этапу регистрации линейного шаблона возмущений, т.е. сигналов, соответствующих единичному акустическому возмущению, распространяющемуся с постоянной скоростью.
В одном варианте осуществления способ содержит обработку первого и второго поднаборов с применением линейной регрессии к каждому из первого и второго поднаборов для каждой испытательной позиции. Линейная регрессия, как известно специалисту в данной области техники, определяет наилучшую линейную аппроксимацию данных и обеспечивает меру аппроксимации и остатки, т.е. меру того, насколько близка аппроксимация к данным. В этом варианте осуществления линейная регрессия применяется к данным, соответствующим позиции вдоль канала от испытательной позиции, в которой зарегистрировано акустическое возмущение, и времени регистрации. Затем результирующую линейную аппроксимацию для каждого поднабора можно анализировать для определения, насколько близко данные соответствуют акустическому возмущению, распространяющемуся от испытательного положения.
Как упомянуто, способ осуществляется в совокупности разных испытательных позиций. Каждый отдельный измерительный участок волокна можно опробовать в качестве испытательной позиции, т.е. обследуется все волокно. Альтернативно, испытательные позиции могут лежать в диапазоне, ограниченном предыдущей информацией о положении или предполагаемом положении объекта. В некоторых приложениях информацию о том, когда и где объект был введен в канал, можно использовать для ограничения первоначального пространства поиска, и по мере отслеживания объекта последнюю известную позицию можно использовать для ограничения поиска для новой регистрации. Дополнительно или альтернативно, можно выбирать, по меньшей мере, некоторые из первых позиций на акустическом возмущении, зарегистрированном в этом положении или вблизи него.
После опробования каждой из различных испытательных позиций способ может содержать этап, на котором идентифицируют одну или несколько испытательных позиций, имеющих самые низкие остатки, т.е. испытательные позиции с наилучшими линейными аппроксимациями. Можно идентифицировать испытательную позицию, дающую самый низкий или несколько самых низких остатков, или можно идентифицировать любую пробную аппроксимацию, имеющую остатки ниже порога. Идентифицированные пробные аппроксимации указывают наиболее вероятные кандидаты для испытательной позиции, где объект создал волну давления, распространяющуюся от этой испытательной позиции. Затем можно проверить фактическую линейную аппроксимацию, определенную для каждого из этих испытательных положений. Линейную аппроксимацию можно проверять на предмет градиента для каждого из первого и второго поднаборов, который указывает акустическое возмущение, распространяющееся от испытательной позиции. В ряде случаев ожидаемый диапазон скоростей акустического возмущения может быть известен из информации об условиях потока в канале и/или из предыдущей регистрации распространяющегося акустического возмущения, и, таким образом, способ может содержать этап идентификации испытательных позиций, где линейная аппроксимация первого набора имеет градиент в первом ожидаемом диапазоне, и линейная аппроксимация второго набора имеет градиент во втором ожидаемом диапазоне. Как упомянуто выше, скорость волны давления может быть, по существу, одинаковой во всех направлениях, и поэтому способ может содержать этап идентификации испытательных позиций, где модуль градиента для линейной аппроксимации для первого поднабора, по существу, равен модулю градиента для линейной аппроксимации для второго поднабора. В любом случае аппроксимация обоих поднаборов данных должна иметь низкие остатки, чтобы свести к минимуму возможность пересечения двух независимых волн давления в испытательном положении, и остатки можно сравнивать с порогом.
В результате, можно идентифицировать акустический сигнал, совпадающий с предполагаемой акустической сигнатурой волны давления, генерируемой в испытательном положении. Это можно использовать в качестве указания, что объект находился в испытательном положении в определенный момент времени.
Однако удобно, чтобы любые идентифицированные акустические сигналы, которые могут быть обусловлены объектом, можно было сравнивать с результатами обработки других кадров данных для определения курса объекта. Другими словами, результаты обработки нескольких разных наборов кадров данных можно использовать для уточнения положения объекта. Заметим, что в некоторых приложениях, например применение отслеживания снаряда в трубопроводе, количество объектов в наблюдаемой секции трубопровода может быть известно заранее. Например, может быть известно, что существует снаряд, и только один снаряд, в трубопроводе, мониторинг которого осуществляется конкретным распределенным акустическим датчиком. Эта информация может быть включена в алгоритм отслеживания.
Волна давления, создаваемая объектом, движущимся по каналу, как упомянуто, распространяется вдоль канала и вызывает акустическое возмущение канала. Акустическое возмущение в каждой отдельной части канала может длиться разное время, т.е. некоторые части канала могут некоторое время резонировать. Таким образом, для обеспечения степени нормализации данных способ может содержать этап, на котором применяют этап регистрации переднего фронта для идентификации переднего фронта любого акустического возмущения, регистрируемого дискретным измерительным участком. Любые данные, следующие за передним фронтом через определенный период времени, можно игнорировать для обеспечения более отчетливой регистрации волны давления.
Таким образом, этот вариант осуществления настоящего изобретения предусматривает очень простой и легкий способ отслеживания движения объектов в каналах, в особенности снарядов в трубопроводах с использованием оптоволоконных распределенных акустических датчиков.
Существующие оптические волокна, проходящие вдоль пути канала, можно использовать в целях измерения, подключив подходящее устройство опроса и обработки. Например, значительная часть трубопроводов имеет заранее существующие отрезки оптического волокна, проходящие вдоль пути трубопровода. Обычно это кабели связи и/или кабели для SCADA (диспетчерского управления и сбора данных) трубопровода, заложенные вместе с трубопроводом по понятным логистическим причинам. В таких случаях, поскольку существующие кабели могут входить в состав устройства мониторинга, сравнительно длинные пролеты трубопровода можно отслеживать, осуществляя лишь ограниченный доступ к трубе.
Согласно различным вариантам осуществления, измерительное волокно для распределенного измерения может располагаться внутри канала, на внешней поверхности канала, может быть непосредственно закопано рядом с каналом или в отдельном соседнем канале. Одно и то же волокно может располагаться, по меньшей мере, частично внутри и, по меньшей мере, частично вне канала. Не существует предписанной позиции для измерительного волокна, при условии что его положение позволяет ему регистрировать достаточный отклик на импульс давления в канале. Вследствие высоких чувствительностей, возможных в волоконно-оптическом измерении, что позволяет измерять создаваемые разности фаз с использованием интерферометрического оборудования, потенциальные пределы позиционирования волокна или пределы выбора существующего волокна велики. Однако, вообще говоря, предпочтительно, чтобы волокно располагалось в пределах приблизительно 3 м от канала для текучей среды и, более предпочтительно, в пределах приблизительно 1,5 м от центральной линии канала, подлежащего мониторингу.
Пространственное разрешение распределенного волоконно-оптического измерения меньше или равно 30 м и в определенных вариантах осуществления меньше или равно 20 м или 10 м. В определенных вариантах осуществления оптическое волокно опрашивается для обеспечения измеренных данных на расстоянии, большем или равном 20 км, и в других вариантах осуществления достижимы расстояния, большие или равные 30 км или 40 км.
Таким образом, этот аспект настоящего изобретения предусматривает способ мониторинга движения объекта в канале в реальном времени. Специалисту в данной области техники очевидно, что волоконно-оптические распределенные акустические датчики могут располагаться на отрезках до 40 км или более с высокой плотностью. Несколько кадров данных могут быть собраны и затем проанализированы, как описано выше, для определения текущего положения объекта. Также можно определить скорость объекта в канале. Способ может содержать этап, на котором генерируют предупредительный сигнал, если объект останавливается и/или снижает скорость ниже порога. Тот факт, что объект остановился, можно определить путем регистрации отсутствия акустической сигнатуры в течение определенного периода времени. Для трубопроводного приложения тот факт, что объект остановился, может свидетельствовать о том, что объект, например снаряд, застрял в трубопроводе. Указание на снижение скорости объекта ниже определенного порога может свидетельствовать о том, что объект, вероятно, скоро застрянет. Предупредительный сигнал можно генерировать в различных формах, в том числе в виде звукового предупредительного сигнала, визуального предупредительного сигнала и/или электронного сообщения и т.п. После генерации предупредительного сигнала автоматизированная система управления трубопроводом может быть приспособлена предпринимать определенное действие, например управлять параметрами потока в канале.
В случае остановки объекта и генерации предупредительного сигнала положение объекта в канале можно определить на основании последней известной позиции объекта. В трубопроводном приложении это, в общем случае, означает локализацию объекта в конкретной секции трубопровода, т.е. между соединениями. Таким образом, факт застревания снаряда и положение снаряда в отдельной секции труба можно определить почти мгновенно.
Как упомянуто выше, при движении объекта по каналу наличие сварных швов и т.д. приводит к возникновению импульса давления и соответствующей волны давления, когда объект минует сварной шов. Такие волны давления также могут генерироваться, когда объект проходит другие ограничения в канале, например нарост материала на внутренних стенках канала или вмятины и т.п., изменяющие внутренний профиль канала. В ходе прогона проводки импульсы давления предположительно возникают в местах расположения сварных швов, соединений, клапанов и т.д., но маловероятно, чтобы импульс давления возникал в непрерывной секции канала. Таким образом, регистрация волны давления, как описано выше, соответствующей секции канала, где обычно не ожидается возникновения волны давления, может свидетельствовать об изменении состояния внутренней поверхности канала в этой точке. Предполагаемое положение импульса давления может быть известно из информации о положении соединений, клапанов и т.д. в трубопроводе и/или из данных, полученных в результате предыдущих прогонов проводки.
Например, некоторые снаряды, предназначенные для обследования трубопровода, содержат последовательность радиально проходящих пальцев, расположенных так, что пальцы, по существу, не контактируют со стенками канала при прохождении объекта по нормальной секции канала, но так, что пальцы могут контактировать с секциями канала, которые выступают во внутреннее пространство канала, т.е. пальцы не касаются стенок, если канал не поврежден, но будут касаться стенок, если канал имеет вмятины или вспучивания. Если такой снаряд проходит через вмятую секцию канала, палец может деформироваться, по меньшей мере, при прохождении вмятой секции. Это может приводить к возникновению импульса давления при очистке поврежденной секции. Этот импульс давления можно регистрировать и использовать для определения положения поврежденной секции канала.
Даже если регистрируемый импульс давления не регистрируется, когда объект проходит поврежденную секцию канала или секцию канала с наростом материала на внутренних стенках, прохождение объекта через такую секцию может генерировать акустическое возмущение. Это акустическое возмущение можно регистрировать и использовать при известном положении снаряда, вышеописанным способом отслеживания, для определения места в канале, где, возможно, произошло повреждение, и которое может потребовать дополнительного обследования.
Таким образом, способ может содержать этап, на котором фиксируют положение объекта, в котором генерируется сколько-нибудь значительный акустический сигнал.
Способ может также содержать этапы, на которых определяют отклик на волну давления на каждом из совокупности дискретных продольных измерительных участков и выводят из совокупности измерений профиль состояния канала. Волна давления, генерируемая объектом, как упомянуто, распространяется в обоих направлениях на протяжении длины канала. Эту волну давления можно регистрировать и использовать для определения положения объекта, как упомянуто выше. Однако в одном варианте осуществления волна давления также используется для определения профиля состояния канала. Как упомянуто выше, было обнаружено, что такие импульсы давления способны распространяться по трубопроводам на большие расстояния с малым затуханием, и поэтому одиночный импульс может обеспечивать достаточное возбуждение для мониторинга 20, 30 или 40 км или более канала.
Фактически импульс давления акустически возбуждает каждую секцию канала по очереди, и отклик можно измерять для определения профиля состояния.
Профиль состояния канала не требуется явно анализировать для определения соответствующих физических характеристик (хотя это возможно). Дополнительное использование можно выводить путем мониторинга канала в течение периода времени для получения одного или нескольких профилей и сравнения этих профилей для определения изменений характеристик. Таким образом, можно получить два профиля канала, соответствующие двум датам с известным разнесением по времени. Например, для трубопровода первый профиль можно получить в ходе первого прогона проводки и сравнить со вторым профилем, полученным в ходе другого прогона проводки некоторое время спустя. Различия в профиле можно определить с использованием анализа данных для получения информации относительно того, какие участки трубы претерпели физические изменения, и, следовательно, положения этих изменений. Более сложный статистический анализ профилей можно проводить, если в течение времени формируется набор из множественных профилей, и с этой целью профили обычно получают в течение каждого прогона проводки. Дополнительно или альтернативно, профили можно брать до или после запланированных работ по обслуживанию или ремонту, чтобы охарактеризовать известные изменения в трубопроводе.
Таким образом, изменения в канале (и, возможно, в состоянии любого материала, например грунта, вокруг канала) можно отслеживать в течение интервалов времени, и можно обеспечивать информацию положения и характеризации, связанную с этими изменениями. Эта информация может побуждать к дальнейшим действиям, например обслуживанию, чистке, физическому обследованию или ремонту.
Хотя движение объекта, например снаряда, в канале может обеспечивать достаточный импульс давления для мониторинга состояния канала, канал также можно обеспечивать импульсом для генерации дополнительных импульсов давления, когда в секции трубопровода не движется никакого снаряда. Генератором импульсов может быть любое устройство, способное возбуждать импульсы давления в канале. Обеспечение импульса позволяет производить мониторинг состояния канала в периоды, когда проводка не запланирована. Генератор импульсов также обеспечивает другое средство определения положения снаряда в канале, когда отклик секции канала, в которой находится снаряд, на импульс давления, порожденный импульсом, отличается от ее нормального отклика в отсутствие снаряда. Таким образом, ввод импульса давления в канал и поиск секции канала с нестандартным откликом можно использовать в качестве другого способа регистрации объекта в канале.
В некоторых вариантах осуществления измеряется амплитудный отклик на импульсную волну. Для этого можно осуществлять интегрирование по доступной полосе каждого канала. Однако в определенных вариантах осуществления дополнительный анализ данных, возвращаемых из распределенного измерения, позволяет обеспечивать спектральный состав каждого канала, что увеличивает возможности мониторинга состояния. Распределенное акустическое измерение согласно вариантам осуществления настоящего изобретения позволяет измерять сейсмические сигналы (волны давления P и сдвига S) в диапазоне от 0 Гц до 5 кГц. Однако более высокие частоты обычно сильно затухают, и мониторинг обычно осуществляется в диапазоне от 0 Гц до 1 кГц.
Когда объект перемещается по каналу, можно получать профиль для конкретной секции канала до и после прохождения объекта. Например, снаряд в трубопроводе, находящийся перед первой секцией, в общем случае генерирует одну или несколько волн давления при прохождении соединений в трубе. Волна давления, распространяющаяся по течению, возбуждает секцию трубы до того, как снаряд пройдет через первую секцию трубы. Некоторое время спустя снаряд пройдет первую секцию и окажется за ней. Волна давления, распространяющаяся против течения, генерируемая снарядом, снова возбуждает первую секцию, что позволяет получить другой профиль состояния. Таким образом, состояние первой секции можно сравнивать до и после прохождения снаряда. Два отклика могут указывать на изменение, вызванное прохождением снаряда, например указывать, насколько эффективно снаряд удалил материал с внутренних стенок трубопровода. Таким образом, способ может содержать этап сравнения, для, по меньшей мере, части канала, профиля состояния канала до прохождения объекта с профилем состояния канала после прохождения объекта.
Как упомянуто выше, способ, в частности, пригоден для отслеживания движения снаряда в трубопроводе. Используемый в данном описании изобретения термин «снаряд» означает любое устройство или инструмент, который намеренно вводится в трубопровод в целях, связанных с работой или конструкцией трубопровода, например обследования, обслуживания и ремонта.
Способ позволяет оперировать с данными, полученными удаленным распределенным акустическим датчиком или, в целях определения положения застрявшего снаряда, с ранее полученными данными. Однако, как упомянуто выше, способ может осуществляться в реальном времени или почти в реальном времени. Способ может содержать этап, на котором опрашивают оптическое волокно. Опрашивание оптического волокна может содержать этапы, на которых регулярно запускают совокупность оптических импульсов в волокно и регистрируют излучение, претерпевшее рэлеевское обратное рассеяние из оптического волокна.
Изобретение также предусматривает компьютерную программу и компьютерный программный продукт для осуществления любого из описанных здесь способов и/или для реализации любого из описанных здесь признаков устройства, и компьютерно-считываемый носитель, на котором хранится программа для осуществления любого из описанных здесь способов и/или для реализации любого из описанных здесь признаков устройства.
Дополнительный аспект изобретения предусматривает устройство для отслеживания снаряда в трубопроводе, содержащее: волоконно-оптический опросчик, приспособленный опрашивать оптическое волокно и обеспечивать распределенное акустическое измерение; и процессор, приспособленный принимать измеренные данные от опросчика и регистрировать акустическую сигнатуру, связанную с движением снаряда в трубопроводе, и определять положение снаряда.
Устройство согласно этому аспекту изобретения обеспечивает все те же преимущества и может использовать все те же варианты осуществления, которые описаны выше со ссылкой на первый аспект изобретения.
В частности, процессор может быть приспособлен для регистрации волны давления, обусловленной движением снаряда в трубопроводе. Процессор может быть приспособлен для генерации предупредительного сигнала, если снаряд останавливается и/или снижает скорость ниже порога. Предупредительный сигнал, предпочтительно, содержит указание положения снаряда в трубопроводе.
Изобретение распространяется на способы, устройство и/или использование, по существу, описанные здесь со ссылкой на прилагаемые чертежи.
Любой признак в одном аспекте изобретения можно применять к другим аспектам изобретения, в любой надлежащей комбинации. В частности, аспекты способа можно применять к аспектам устройства и наоборот.
Кроме того, признаки, реализованные аппаратными средствами, в общем случае можно реализовать программными средствами и наоборот. Соответственно, допустима любая ссылка на программные и аппаратные признаки.
Ниже будут описаны предпочтительные признаки настоящего изобретения, исключительно в порядке примера, со ссылкой на прилагаемые чертежи, в которых:
фиг.1 - основные компоненты распределенного волоконно-оптического датчика;
фиг.2 - волоконный датчик, размещенный на протяжении длины трубопровода;
фиг.3 - поперечное сечение трубопровода и измерительных волокон;
фиг.4 и 5 - выходные данные мониторинга трубопровода; и
фиг.6a и 6b - выходные данные алгоритма отслеживания данных согласно варианту осуществления изобретения.
На фиг.1 показана схема распределенной конфигурации волоконно-оптического измерения. Отрезок измерительного волокна 104, которое может представлять собой стандартное оптическое волокно, например, используемое в телекоммуникационных приложениях, одним концом подключен к опросчику 106. Выходной сигнал опросчика 106 поступает на процессор 108 сигнала и в необязательном порядке на пользовательский интерфейс, который на практике можно реализовать в виде надлежащим образом настроенного ПК. Измерительное волокно может иметь многокилометровую длину и в этом примере имеет длину около 40 км.
Опросчик запускает в измерительное волокно опрашивающий оптический сигнал, который, например, может содержать последовательность импульсов, имеющих выбранный частотный шаблон. Явление рэлеевского обратного рассеяния приводит к тому, что некоторая доля света, входящего в волокно, отражается обратно к опросчику, где регистрируется для обеспечения выходного сигнала, выражающего акустические возмущения вблизи волокна. Форма оптического ввода и способ регистрации позволяют пространственно разрешать единое непрерывное волокно на дискретные измерительные отрезки. Таким образом, акустический сигнал, зарегистрированный на одном измерительном отрезке, может обеспечиваться, по существу, независимо от зарегистрированного сигнала на соседнем отрезке. Пространственное разрешение в данном примере составляет приблизительно 10 м, в результате чего выходной сигнал опросчика принимает форму 4000 независимых каналов данных.
Распределенный акустический датчик может представлять собой, например, распределенный акустический датчик, например, описанный в британском патенте № 2442745, содержание которого, таким образом, включено сюда в порядке ссылки.
Таким образом, единое измерительное волокно может обеспечивать измеренные данные аналогично мультиплексированному массиву соседних датчиков, размещенных на линейном пути, который может быть прямолинейным или криволинейным в зависимости от приложения.
На фиг.2 показана конфигурация для осуществления способа, отвечающего настоящему изобретению, в которой измерительное волокно 202 (и соответствующие опросчик и/или процессор 204) располагается вдоль пути канала, который в этом примере является трубопроводом 206. Волокно, предпочтительно, размещено вдоль пути трубопровода. Таким образом, различные дискретные измерительные участки волокна непосредственно соответствуют продольной секции трубы. Однако можно использовать другие конфигурации волокна, в каковом случае может понадобиться знать конфигурацию волокна относительно трубопровода, чтобы обеспечивать отслеживание в трубопроводе. Волокно может располагаться внутри или вне трубопровода. На фиг.3 показано поперечное сечение трубы 302 с возможными положениями измерительного волокна, способного регистрировать отклик импульса в трубе.
Труба в данном примере имеет внутренний диаметр 1200 мм и стенки из углеродистой стали толщиной 50 мм и предназначена для транспортировки природного газа под давлением около 80 бар. Труба может быть заглублена приблизительно на 1-2 м под поверхностью, которая, в некоторых ситуациях, может быть уровнем грунта или морским дном. Волокно 304 иллюстрирует волокно, располагающееся внутри внутреннего канала трубы 302, покоящееся на дне трубы. Волокно 306 иллюстрирует волокно, прикрепленное к внешней поверхности трубы, а волокно 308 иллюстрирует волокно, расположенное в отдельном кабелепроводе 310, расположенном приблизительно в 1,5 м от центральной линии газопровода. Кабелепровод 310 обычно закладывается во время установки трубопровода для прокладки линий связи и/или SCADA. Волокно 312 иллюстрирует волокно, закопанное непосредственно в грунт вдоль трубопровода, приблизительно в 1 м от центральной линии трубы.
Очевидно, что для каждого отдельного размещения волокна измеренный отклик на импульс давления в трубе будет разным и будет зависеть от разных факторов. Сигнал, зарегистрированный волокном 308, будет зависеть от передаточных характеристик грунта, например, между трубой 302 и кабелепроводом 310, в то время как измерительные волокна 304 и 306 будут меньше подвержены воздействиям. Однако, как будет объяснено ниже, это не оказывает негативного влияния на настоящее изобретение, и можно использовать любое размещение волокна, которое создает надежный отклик на импульс давления. Волокно, предпочтительно, проходит вдоль трубопровода, который надлежит отслеживать. Распределенное акустическое измерение было продемонстрировано в отрезках волокна до и свыше 40 км. Таким образом, единый распределенный акустический датчик может обеспечивать отслеживание снаряда на протяжении 40 км трубопровода. Последовательность распределенных акустических датчиков можно разместить для обеспечения отслеживания на более длинных участках трубопровода. Для трубопроводов длиной порядка 80 км или около того единое волокно можно использовать на протяжении длины волокна с распределенным акустическим датчиком, размещенным на каждом конце волокна. Однако для более коротких трубопроводов путь волокна можно удвоить, проложив его вдоль трубопровода в обратном направлении, для обеспечения дополнительных датчиков для мониторинга.
Согласно фиг.2, объект, в этом случае снаряд 208, располагается в трубопроводе таким образом, что он перемещается в трубопроводе в направлении 210 под действием потока текучей среды в трубопроводе. Снаряд можно вводить в трубопровод в секции трубопровода (не показана), предназначенной для ввода снарядов.
Известны различные типы снарядов, имеющие разное назначение. Например, чистящие сферы являются одним примером простого снаряда. Они содержат сферы из материала, предназначенного для перемещения по трубопроводу и эффективного скобления внутренних стенок трубопровода для удаления нароста углеводородов 214 на внутренних стенках трубы. Известны также сложные снаряды для обследования. Снаряд для обследования может представлять собой сложное устройство сбора данных, приспособленное обследовать трубопровод на предмет знаков или повреждения или порчи, которые могут привести к отказу трубопровода.
Снаряд вводится в секцию трубопровода выше по течению и перемещается по трубопроводу, в общем случае, под действием текучей среды, транспортируемой по трубопроводу. Таким образом, обследование или чистку трубопровода можно осуществлять без сколько-нибудь значительного прерывания работы трубопровода. Затем снаряд забирают в секции трубопровода для извлечения снаряда (не показана) и удаляют.
Прохождение снаряда, как упомянуто, должно происходить без прерывания работы трубопровода. Поэтому необходимо, чтобы снаряд проходил по трубопроводу от точки ввода к точке извлечения. Однако иногда снаряд может застревать в трубопроводе. Например, в нефтепроводах может происходить нарост 114 восковых или полутвердых углеводородов. При накоплении большого количества такого материала на внутренней поверхности трубы снаряд может оказаться неспособен удалить материал и может застрять. Дополнительно или альтернативно, обломки, удаляемые снарядом при его перемещении по трубопроводу, могут накапливаться перед снарядом и препятствовать движению снаряда. При накоплении достаточно большого количества обломков снаряд может застревать.
Дополнительно, если секция 216 трубы покоробилась или смялась, например, вследствие повреждения или порчи трубопровода, снаряд может оказаться неспособен очистить поврежденную секцию и опять же может застрять.
Если снаряд застревает, он может перекрыть значительную величину потока. Это может сильно повлиять на работу трубопровода, и может потребоваться прервать работу трубопровода, пока снаряд не будет сдвинут или удален. Очевидно, что прекращение работы трубопровода может иметь значительные последствия, и поэтому желательно возобновить нормальную работу как можно скорее. Таким образом, желательно максимально быстро удалить снаряд. Однако чтобы удалить снаряд, его нужно найти. Секции трубопровода, пройденные одиночным снарядом за прогон проводки, могут составлять десятки километров в длину, и трубопроводы часто закопаны в землю. Таким образом, отыскание захваченного снаряда и обеспечение доступа к нему является нетривиальной задачей. Поэтому важно быстро и точно определить, где находится захваченный снаряд.
Даже если застрявший снаряд не создает значительного препятствия потоку (некоторые снаряды имеют возможность открывать предусмотренный в нем проточный клапан в случае значительного повышения заднего давления), присутствие заблокированного снаряда, очевидно, создает препятствие для дальнейшего прогона проводки. Однако сам факт захвата снаряда может быть не очевиден до тех пор, пока не выяснится, что снаряд не появился в точке извлечения (или в точке обследования) в течение ожидаемого времени прогона проводки.
Кроме того, некоторые снаряды для обследования являются очень сложными и дорогостоящими устройствами, и сам факт бездействия снаряда по причине его захвата в трубопроводе является значительной растратой ресурсов.
Вариант осуществления, показанный на фиг.2, предусматривает регистрацию захвата снаряда в реальном времени и определение положения снаряда. Вариант осуществления, показанный на фиг.2, предусматривает регистрацию импульсов давления в трубопроводе 206, вызванных движением снаряда в трубопроводе.
Трубопровод 206 содержит последовательность непрерывных секций трубы, соединенных между собой соединениями 212. Соединения 212 могут содержать, например, кольцевые сварные швы. Такие сварные швы связывают секции трубы друг с другом с образованием непрерывного трубопровода. Однако на соединениях 212 внутренняя поверхность трубы изменяется. Было обнаружено, что когда снаряд в трубопроводе пересекает сварной шов, он испытывает дополнительное сопротивление своему прохождению через трубопровод. Это приводит к накоплению небольшого избыточного давления позади снаряда. Когда снаряд очищает сварной шов, спад давления приводит к возникновению импульса, который перемещается в обоих направлениях вдоль трубопровода в виде волны давления.
Импульс давления, таким образом, создает акустическое возмущение в том месте, где снаряд проходит кольцевой сварной шов или другое ограничение. Однако волна давления также распространяется на значительные расстояния вдоль трубопровода. Труба играет роль волновода, и было обнаружено, что импульс может распространяться на десятки километров без чрезмерного затухания. Импульс, проходящий по любому конкретному отрезку трубы, создает акустическое возмущение, которое можно регистрировать с помощью распределенного волоконного датчика 202.
На фиг.4 показана гистограмма и соответствующий каскадный график, иллюстрирующие выход распределенного волоконного датчика в ответ на последовательность импульсов давления, введенных в соседний канал. Данные на фиг.4 сгенерированы измерительным волокном в трубопроводе. По оси x гистограммы и каскадного графика отложена позиция на протяжении длины измерительного волокна (которое в этом случае имеет полную длину приблизительно 40 км). Поскольку волокно проложено вдоль трубопровода, ось x также соответствует позиции вдоль трубопровода.
Гистограмма показывает в момент времени амплитуду зарегистрированного акустического сигнала, возвращенного из измерительного волокна. В порядке, в котором можно просматривать все 4000 каналов, каждый штрих на диаграмме представляет пиковую амплитуду из группы 10-метровых отрезков. При желании можно рассмотреть отдельный 10-метровый отрезок. Нижний график представляет каскадный график со скоростью обновления 0,05 секунды, демонстрирующий интенсивность звука в зависимости от расстояния и времени. Время отложено по оси y каскада, и самые последние данные отображены вверху. По оси x опять же отложено расстояние вдоль волокна и, следовательно, трубопровода, и интенсивность звука на надлежащем каскадном графике будет представлена цветом/уровнем шкалы серого каждой точки данных. Однако в целях объяснения можно считать, что каскад на фиг.4 демонстрирует акустическое возмущение как функцию расстояния вдоль волокна от времени.
На каскадном графике можно наблюдать два основных признака. Первый представляет собой область постоянного акустического возмущения в левой части графика, обозначенную 402, соответствующую длине измерительного волокна приблизительно 4000 м. Она соответствует промышленной установке, находящейся над этим отрезком волокна, производящей постоянный вибрационный шум. Второй представляет собой различные картины шеврона (т.е. V-образные формы), которые можно наиболее отчетливо наблюдать в области 404 на удалении от постоянного шума промышленной установки.
Вершина каждого шеврона располагается в точке 406 вдоль волокна, соответствующей источнику импульса давления. V-образная форма графика соответствует импульсу давления, распространяющемуся вдоль трубы в обоих направлениях от источника импульса, и наклон V-образной формы соответствует скорости звука в текучей среде под давлением, содержащейся в трубе, которая в этом случае равна приблизительно 400 м/с. Можно видеть, что последовательность импульсов давления вводится в текучую среду, в этом случае газ под давлением, и формируются множественные трассы. В верхнем графике, гистограмме, отдельные импульсы появляются в данный момент времени в своих соответствующих позициях, разнесенных вдоль волокна.
Можно видеть, что импульс давления отчетливо регистрируется в трубопроводе с использованием распределенного акустического датчика. Поскольку движение снаряда в трубопроводе создает повторяющуюся последовательность импульсов давления, такую повторяющуюся последовательность можно использовать для определения положения снаряда в трубопроводе. Однако характерную V-образную форму, обусловленную распространением импульса давления в обоих направлениях в трубопроводе, предпочтительно использовать в качестве акустической сигнатуры снаряда.
Распространение в V-образной форме можно использовать как признак регистрации с использованием сравнительно простого алгоритма.
Прежде всего, алгоритм переднего фронта используется для регистрации первой регистрации, выполненной каждым каналом распределенного акустического датчика. Это обеспечивает очистку и нормализацию данных. Очевидно, что когда импульс давления проходит секции трубопровода, он акустически возбуждает эти секции, и каждая секция может резонировать в течение отдельного периода времени. Данные нормализуются только путем регистрации переднего фронта. На фиг.6a показан каскадный график акустических данных, полученных от распределенного акустического датчика в ходе прогона проводки после нормализации. Время отложено по оси y, на этот раз самые последние данные отображены внизу (в отличие от фиг.4), и расстояние вдоль волокна отложено по оси x. Можно видеть, что нормализованные данные устраняет резонансный эффект из данных. На этом графике можно видеть трассы V-образной формы.
Для упрощения регистрации окно данных выбирается таким образом, чтобы на протяжении окна можно было ожидать только один импульс давления. Для алгоритма отслеживания снаряда можно оценивать предполагаемую частоту импульсов давления, обусловленных пересечением снарядом соединений или сварных швов, и надлежащее окно, выбранное таким образом, чтобы можно было ожидать только один импульс давления. Таким образом, алгоритм может запускаться через каждые N кадров на основании ранее полученных N кадров данных.
Для каждого набора из N кадров в качестве окна поиска выбирается окно поиска поднабора каналов, т.е. акустических каналов. Уменьшение количества каналов в окне поиска уменьшает необходимую обработку. Например, можно применять окно поиска из 200 акустических каналов, т.е. дискретных измерительных участков волокна. В данном примере каждый акустический канал имеет длину 10 м, и поэтому окно поиска соответствует окну 2 км трубопровода длиной 40 км, подлежащего мониторингу. Окно поиска может быть основано на ранее зарегистрированной или оцененной позиции снаряда.
Для конкретного окна поиска точки данных организованы в виде первого и второго поднаборов на основании их позиции относительно испытательного положения. Первый поднабор содержит данные, соответствующие каналам с одной стороны испытательного положения, и второй поднабор содержит данные, соответствующие каналам с другой стороны испытательного положения, т.е. для конкретного испытательного положения X данные могут быть организованы в виде набора каналов непосредственно до позиции x1 и в виде набора каналов непосредственно после x1.
Для каждого поднабора можно осуществлять линейную регрессию. Таким образом, способ может содержать вычисление sum_x, sum_y, sum_x2, sum_y2 и sum xy, где x равно расстоянию от испытательной позиции и y равно времени.
Осуществление линейной регрессии на каждом поднаборе приводит к уравнению, представляющему линию наилучшего приближения и остаток для каждого набора.
Затем испытательное положение можно изменить и повторить способ для нового испытательного положения. Опробованный таким образом набор испытательных положений может включать в себя каждый акустический канал волокна или, альтернативно, ограниченный набор возможных испытательных положений может быть основан на предполагаемом или ранее определенном положении снаряда. Набор испытательных положений также может быть основан на положениях, где зарегистрировано значительное акустическое возмущение.
После анализа всех испытательных положений способ предусматривает идентификацию N наборов, имеющих самые низкие остатки из пробных аппроксимаций. Затем можно вычислить расстояние по перпендикуляру от каждой точки данных в наборе до линии, и точки данных, соответствующие 20% точек данных с наихудшей аппроксимацией, можно отбросить для устранения паразитных выбросов. Затем вычисление для каждого из идентифицированных испытательных положений можно повторить.
Наконец, на этапе классификации можно определить, обеспечивает ли испытательное положение акустический сигнал классифицируемой V-образной формы. Классификация может предусматривать определение, имеют ли линии наилучшего приближения для двух поднаборов данных правильный градиент (т.е. в каждом случае возмущение перемещается от испытательного положения), и имеет ли каждая линия низкие остатки. Далее на этапе классификации можно определить, попадает ли градиент в ожидаемый диапазон градиента и/или равны ли, по существу, градиенты всех линий. Этап классификации может быть основан на предполагаемом градиенте, данных свойствах материала трубопровода и/или ранее зарегистрированной V-образной форме. Требование низких остатков для каждой из двух аппроксимаций необходимо для того, чтобы не принять по ошибке два импульса давления, которые не связаны между собой и распространяются в противоположных направлениях, за импульс давления, сгенерированный снарядом. Остатки можно сравнивать с пороговым уровнем.
На фиг.6b показан результат алгоритма отслеживания снаряда, примененного к данным, показанным на фиг.6a. Можно видеть, что положение и перемещение снаряда в трубопроводе отчетливо отслеживается на основании импульсов давления, создаваемых снарядом при движении по трубопроводу.
Волну давления, созданную движением снаряда, можно использовать в качестве акустической сигнатуры для определения положения снаряда. Это можно использовать для отслеживания положения и скорости снаряда. В случае когда импульсы давления, обусловленные движением снаряда по трубопроводу, больше не регистрируются, это можно использовать в качестве указания остановки снаряда, в каковом случае последнее известное положение можно использовать в качестве указания положения снаряда.
Импульсы давления, распространяющиеся по трубопроводу, также можно использовать для обеспечения профиля состояния трубопровода.
На фиг.5 показаны данные в форме аналогичной представленной на фиг.4, но здесь оси гистограммы и нижнего каскадного графика аналогичным образом перемасштабированы. На фиг.5 ось x каскадного графика соответствует отрезку измерительного кабеля длиной около 4 км (в отличие от 40 км на фиг.4), и скорость обновления на фиг.5 задана равной 2 секундам (в отличие от 0,05 с на фиг.4).
Данные для фиг.5 поступают из той же конфигурации трубы и волокна, что и на фиг.4, и путь снаряда отчетливо наблюдается как диагональная трасса 502 в каскадном графике. Это показывает, что повторяющаяся последовательность импульсов давления сама по себе может использоваться для отслеживания движения снаряда. В каскадном графике на фиг.5 также можно наблюдать последовательность вертикальных линий различной интенсивности. Линии соответствуют различным положениям на протяжении длины трубы и могут рассматриваться как отпечаток пальца или штрих-код трубы, причем картина линий соответствует физическим характеристикам или состоянию трубы и, в некоторой степени, ее непосредственному окружению (в этом случае грунту, в который она закопана).
Рассматривая профиль состояния, обеспеченный этим эффектом штрихкода, понятно, что он соответствует эффекту шеврона, показанного на фиг.4, но наблюдаемому со сжатой осью времени. Импульсы давления, проходящие по трубе, можно рассматривать как акустически «освещающие» или возбуждающие каждый участок трубы, по которой они проходят, извлекающие отклик из трубы и ее окружения, благодаря чему отклик регистрируется распределенным измерительным волокном. Благодаря усреднению по времени, можно видеть, что некоторые секции трубы имеют не такой отклик на импульсы, как другие. Возможные причины этих отличий включают в себя локальный углеводородный нарост на стенке трубы, дефект стенки трубы или изменение профиля стенки, или, например, изменение состава грунта вблизи трубы. Таким образом, график обеспечивает профиль состояния трубы в данное время или день.
Хотя это не показано, можно извлекать и обеспечивать спектральный состав измеренных данных. Это добавит дополнительное измерение графикам, показанным на фиг.5, и расширит возможности мониторинга состояния. Сейсмические сигналы обычно преобладают на частотах ниже 500 Гц вследствие высокого затухания более высоких частот в грунте.
Например, глядя на выбранную/ые полосу/ы частот, можно отфильтровать «шум» от промышленной установки в области 402 на фиг.4. Вышеописанный профиль или штрих-код трубы, дополнительно разложенный на частотные составляющие, обеспечивает пользователю более детальную информацию и позволяет осуществлять более углубленный анализ. Например, разные типы физических явлений могут быть связаны с конкретными полосами частот. Например, изменения в более высоких полосах частот могут указывать на турбулентный поток в трубе, обусловленный наростом парафиновых отложений, тогда как изменения в более низкой полосе частот может указывать на изменения состояния грунта, в котором залегает труба. Таким образом, интерпретированные результаты могут обеспечивать пользователю информацию большего объема и качества.
Для обеспечения мониторинга состояния в отсутствие прогонов проводки генератор импульсов можно разместить в точке вдоль трубопровода и приспособить вводить импульс давления в текучую среду в трубе. Генератор импульсов может принимать различные формы, например, гидроцилиндра. Сгенерированный импульс давления распространяется в обоих направлениях по трубе от генератора импульсов.
Очевидно, что настоящее изобретение было описано выше исключительно в порядке примера и допускает модификацию, касающуюся деталей, в рамках объема изобретения.
Каждый признак, раскрытый в описании и (в надлежащих случаях) в формуле изобретения и чертежах, может быть обеспечен независимо или в любой надлежащей комбинации.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНИТОРИНГ КАНАЛА | 2009 |
|
RU2511228C2 |
| МОНИТОРИНГ СКВАЖИНЫ С ПОМОЩЬЮ СРЕДСТВА РАСПРЕДЕЛЕННОГО ИЗМЕРЕНИЯ | 2010 |
|
RU2568652C2 |
| ВОЛОКОННО-ОПТИЧЕСКОЕ АКУСТИЧЕСКОЕ ИЗМЕРЕНИЕ | 2009 |
|
RU2518978C2 |
| МОНИТОРИНГ ГИДРАВЛИЧЕСКОГО РАЗРЫВА ПЛАСТА | 2010 |
|
RU2537419C2 |
| МОНИТОРИНГ ГИДРАВЛИЧЕСКОГО РАЗРЫВА ПЛАСТА | 2010 |
|
RU2648743C2 |
| МОНИТОРИНГ СКВАЖИНЫ | 2010 |
|
RU2693087C2 |
| ОПРЕДЕЛЕНИЕ САМОРАСЦЕПА ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2013 |
|
RU2619148C2 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ПРОТЯЖЕННЫХ ОБЪЕКТОВ, ПРЕИМУЩЕСТВЕННО ПРОДУКТОПРОВОДОВ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2287131C1 |
| ИМПУЛЬСНО-АКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВНУТРИТРУБНОГО СНАРЯДА В МАГИСТРАЛЬНОМ ТРУБОПРОВОДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2307978C2 |
| СИСТЕМА КОНТРОЛЯ СОСТОЯНИЯ ТРУБОПРОВОДА | 2015 |
|
RU2606719C1 |


Раскрыты способы и устройство для отслеживания объектов в каналах, в особенности для отслеживания движения снаряда в трубопроводе. Распределенное акустическое измерение используется для получения сигналов-откликов от совокупности дискретных продольных измерительных участков волоконно-оптического кабеля, пролегающего на протяжении длины канала. Способ предусматривает регистрацию акустической сигнатуры, соответствующей объекту, движущемуся в канале. Акустическая сигнатура может содержать последовательность импульсов давления, обусловленных объектом, проходящим соединения и т.д. в канале. Предпочтительно, способ предусматривает регистрацию волн давления, обусловленных движением объекта по каналу. Регистрация характеристического сигнала волны давления позволяет отличать объект от других акустических возмущений. В трубопроводных приложениях снаряд можно отслеживать в реальном времени, если снаряд останавливается, может генерироваться предупредительный сигнал, и положение снаряда будет известно. 4 н. и 13 з.п. ф-лы, 7 ил.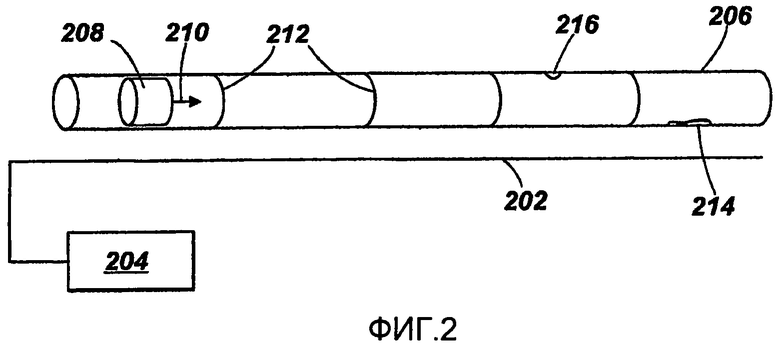
1. Способ отслеживания движения объекта в канале, содержащий этапы, на которых
собирают данные, соответствующие сигналам отклика из опроса оптического волокна, расположенного вдоль пути канала, для обеспечения распределенного акустического измерения, и
обрабатывают отклики от каждого из совокупности дискретных продольных измерительных участков для регистрации акустической сигнатуры, связанной с движением объекта в канале, и определения источника акустической сигнатуры,
причем на этапе регистрации акустической сигнатуры регистрируют волну давления, распространяющуюся по каналу, вызванную перемещением объекта в канале.
2. Способ по п.1, в котором акустическая сигнатура содержит последовательность импульсов давления.
3. Способ по п.1, в котором акустическая сигнатура содержит первое и второе акустические возмущения давления, распространяющиеся друг от друга в противоположных направлениях в канале.
4. Способ по п.1, в котором на этапе обработки откликов для каждой из совокупности испытательных позиций вдоль канала
формируют первый поднабор данных, соответствующих совокупности кадров данных из дискретных измерительных участков, соответствующий участкам канала с одной стороны от испытательной позиции,
формируют второй поднабор данных, соответствующих совокупности кадров данных из дискретных измерительных участков, соответствующий участкам канала с другой стороны от испытательной позиции, и
обрабатывают первый и второй поднаборы для определения наличия акустического возмущения в первом и втором поднаборах, распространяющегося от испытательной позиции.
5. Способ по п.4, в котором на этапе обработки первого и второго поднаборов применяют линейную регрессию к каждому из первого и второго поднаборов для каждой испытательной позиции.
6. Способ по п.5, содержащий этап, на котором идентифицируют одну или несколько испытательных позиций, имеющих самые низкие остатки.
7. Способ по п.5, содержащий этап идентификации испытательных позиций, где линейная аппроксимация первого набора имеет градиент в первом ожидаемом диапазоне, и линейная аппроксимация второго набора имеет градиент во втором ожидаемом диапазоне.
8. Способ по п.4, содержащий этап идентификации испытательных позиций, где модуль градиента для линейной аппроксимации для первого поднабора, по существу, равен модулю градиента для линейной аппроксимации для второго поднабора.
9. Способ по п.1, в котором на этапе обработки откликов применяют этап регистрации переднего фронта для идентификации переднего фронта любого акустического возмущения, регистрируемого дискретным измерительным участком.
10. Способ по п.1, в котором длина распределенного волоконно-оптического датчика больше или равна 20 км.
11. Способ по п.1, в котором способ содержит этапы, на которых отслеживают движение объекта в реальном времени и генерируют предупредительный сигнал, если объект останавливается и/или снижает скорость ниже порога.
12. Способ по п.1, в котором трубопровод является трубопроводом, и объект является снарядом.
13. Способ по п.1, содержащий этап опрашивания оптического волокна путем запуска совокупности оптических импульсов в волокно и регистрации излучения, претерпевшего рэлеевское обратное рассеяние из оптического волокна.
14. Считываемый компьютером носитель, на котором хранится программа, которая при выполнении на соответствующем компьютере, побуждает компьютер осуществлять способ по п.1.
l5. Устройство для отслеживания снаряда в трубопроводе, содержащее
волоконно-оптический опросчик, приспособленный опрашивать оптическое волокно и обеспечивать распределенное акустическое измерение, и
процессор, приспособленный принимать измеренные данные от опросчика и регистрировать акустическую сигнатуру, связанную с движением снаряда в трубопроводе, и определять положение снаряда.
16. Устройство мониторинга трубопровода в реальном времени, содержащее устройство по п.15, в котором процессор выполнен с возможностью генерировать предупредительный сигнал, если снаряд останавливается и/или снижает скорость ниже порога.
17. Устройство по п.16, в котором предупредительный сигнал содержит указание положения снаряда в трубопроводе.
| JP2000088561 A, 31.03.2000 | |||
| НАПОЛНИТЕЛЬНАЯ ГОЛОВКА-ДОЗАТОР ДЛЯ ЕМКОСТЕЙ | 2009 |
|
RU2442745C1 |
| JPH08233564 A, 13.09.1996 | |||
| JPH08233932 A, 13.09.1996 | |||
| ДУГОВОЙ ПЛАЗМОТРОН АВДЕЕВЫХ | 2001 |
|
RU2212773C2 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ПРОТЯЖЕННЫХ ОБЪЕКТОВ, ПРЕИМУЩЕСТВЕННО ПРОДУКТОПРОВОДОВ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2287131C1 |
| US 5194847 A, 16.03.1993 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПИРОКАТЕХИНА В ФЕНОЛСОДЕРЖАЩИХ ПРОДУКТАХ | 0 |
|
SU170736A1 |
| Станок для изготовления шлакобетонных камней и т.п. изделий | 1943 |
|
SU68692A1 |

