Изобретение касается медицинских инструментов, в частности систем и способов для координации получения изображений с использованием различных устройств визуализации.
Поворотные рамы C-типа для рентгеноскопии используются в различных кабинетах, предназначенных для проведения интервенционных процедур и хирургических вмешательств, с целью получения двумерных (2D) и трехмерных (3D) изображений исследуемой анатомической структуры. Способы планирования траектории рамы C-типа выполняют оптимизацию параметров получения рентгеноскопических данных (например, угловых положений рамы C-типа), исходя из требуемого вида. Требуемый вид обычно определяется на 3D изображениях ранее собранных рентгеноскопических данных без учета специфики хирургических приспособлений, например, когда пациенту введен эндоскоп или другой инструмент (например, в грудную полость для проведения эндоскопической операции на сердце).
В эндоскопической хирургии при проекционном планировании могут возникать следующие дополнительные проблемы. Когда эндоскоп введен, диапазон перемещения рамы C-типа уменьшается, при этом объект исследования может быть закрыт в результате рассеяния, вызванного металлическими материалами эндоскопа, особенно если эндоскоп находится между источником рентгеновского излучения и отображаемым объектом (например, артерией). Извлечение эндоскопа для проведения визуализации нарушает рабочий процесс, увеличивая продолжительность операции, при этом возможно потребуется замена оборудования, если нарушена стерильность. Эти проблемы дополнительно усложняют непростую задачу планирования расположения рамы C-типа.
Согласно настоящим принципам предложены системы и способы для планирования и координации получения изображений с использованием различных устройств визуализации. В одном варианте осуществления система получения изображений включает в себя первое устройство для визуализации, выполненное с возможностью получения изображений объекта из заданного положения. Второе устройство для визуализации выполнено с возможностью получения изображений объекта из множества ориентационных расположений, выбранных на основе положения первого устройства для визуализации и руководствуясь критериями для обеспечения наилучшего ориентационного расположения или наилучших ориентационных расположений. В запоминающем устройстве хранится модуль планирования, выполненный с возможностью определения, по меньшей мере, одной траектории, позволяющей достичь наилучшего ориентационного расположения или наилучших ориентационных расположений второго устройства для визуализации для получения, осуществляемого совместно с первым устройством для визуализации, изображения или изображений объекта.
Другая система получения изображений включает в себя эндоскоп, выполненный с возможностью осмотра исследуемой области и занимающий заданное положение. Рентгеноскопическая система имеет источник и детектор, расположенные на раме C-типа. Движение рамы C-типа регулируется для получения изображений объекта путем перемещения рамы C-типа во множество ориентационных положений. В запоминающем устройстве хранится модуль планирования, выполненный с возможностью разработки плана для совместного использования положения эндоскопа и ориентационных расположений рамы C-типа, чтобы оптимизировать вид для получения изображения или изображений объекта согласно критериям.
Способ мультимодального получения изображений включает в себя получение предварительной сканограммы с помощью первого устройства визуализации, имеющего подвижную конструкцию; вычисление положения второго устройства визуализации относительно подвижной конструкции; выбор исследуемой области на изображении второго устройства визуализации; вычисление оптимального ориентационного расположения или оптимальных ориентационных расположений для получения данных применительно к подвижной конструкции с использованием критериев оптимизации для определения наилучшего ориентационного расположения или наилучших ориентационных расположений для исследуемой области; визуальное воспроизведение наилучшего ориентационного расположения или наилучших ориентационных расположений для разработки оптимизированного плана, используя дооперационные изображения перед получением изображений с помощью первого устройства визуализации; а также получение изображений исследуемой области с помощью первого устройства визуализации в соответствии с оптимизированным планом.
Другой способ мультимодального получения изображений включает в себя получение предварительной сканограммы с помощью рентгеноскопической системы, имеющей источник и детектор, расположенные на раме C-типа; вычисление положения эндоскопа относительно рамы C-типа; выбор исследуемой области на изображении эндоскопа для рентгеновской визуализации; вычисление оптимального поворотного ориентационного расположения или ориентационных расположений для получения данных применительно к раме C-типа, используя критерии оптимизации, для определения наилучшего ориентационного расположения или наилучших ориентационных расположений для исследуемой области; визуальное воспроизведение наилучшего ориентационного расположения или наилучших ориентационных расположений для разработки оптимизированного плана, используя дооперационные изображения перед получением рентгеновских изображений; а также получение рентгеновских изображений исследуемой области в соответствии с оптимизированным планом.
Эти и другие задачи, признаки и преимущества настоящего раскрытия станут очевидны из последующего подробного описания иллюстративных вариантов осуществления, сопровождаемых прилагаемыми чертежами.
В данном раскрытии подробно представлено описание предпочтительных вариантов осуществления со ссылкой на следующие чертежи, где
на Фиг. 1 показана блок-схема/блок-схема алгоритма, представляющая кабинет для проведения гибридной визуализации, где множество устройств визуализации позиционно взаимодействуют для получения оптимальных изображений, не создавая взаимных помех, согласно одному варианту осуществления;
на Фиг. 2 показана блок-схема алгоритма, где представлен способ мультимодального получения изображений согласно одному иллюстративному варианту осуществления;
на Фиг. 3 показана схема, представляющая способ оптимизации для получения оптимизированных рентгеновских сканов согласно одному иллюстративному варианту осуществления;
на Фиг. 4 показано иллюстративное изображение, где представлено эндоскопическое изображение в режиме реального времени, наложенное на фоновое рентгеновское изображение для получения улучшенного вида исследуемой области согласно одному иллюстративному варианту осуществления;
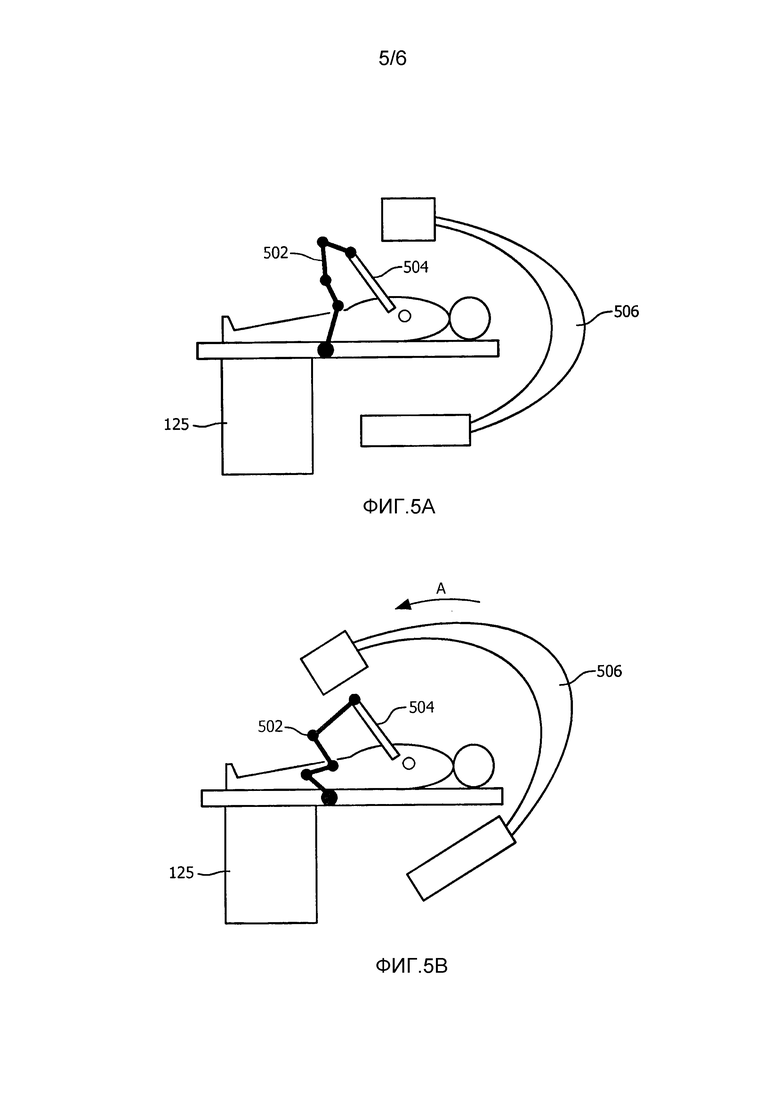
на Фиг. 5A показана схема, представляющая раму C-типа в первом положении, а также роботизированную систему, удерживающую эндоскоп, согласно одному иллюстративному варианту осуществления;
на Фиг. 5B показана схема, представляющая раму C-типа во втором положении, а также роботизированную систему, удерживающую эндоскоп в том же положении, однако роботизированная система совершает движение, чтобы избежать столкновения с рамой C-типа согласно одному иллюстративному варианту осуществления;
на Фиг. 6 показана блок-схема алгоритма, представляющая другой способ совместного мультимодального получения изображений согласно одному иллюстративному варианту осуществления.
Согласно настоящим принципам предложены системы и способы для планирования и координации получения изображений с использованием различных устройств визуализации. В одном варианте осуществления устройство визуализации может включать в себя рентгеновскую визуализацию. Угловые положения источника рентгеновского излучения и детектора рентгеновского излучения планируются на основе положения интраоперационного визуализирующего устройства, такого как эндоскоп. Оптимальное изображение исследуемой анатомической структуры получают путем недопущения столкновения системы рентгеновской визуализации с эндоскопом. Это позволяет избежать закрытия объекта исследования, вызванного рассеянием рентгеновских лучей от металлических участков эндоскопа, а также позволяет распознать объект исследования из эндоскопических изображений в режиме реального времени (в дополнение к планированию, например, из дооперационных изображений). Данные варианты осуществления включают в себя клинические случаи, при которых минимально инвазивные хирургические вмешательства проводятся под контролем рамы C-типа для рентгеноскопии и эндоскопическим контролем. Однако настоящие принципы предполагают возможность использования и других устройств визуализации.
В другом варианте осуществления предложен способ управления эндоскопом робототехническим устройством для расширения поля обзора при визуализации. Если эндоскоп управляется робототехническим устройством, положение рамы C-типа и робототехнического устройства могут объединяться в критериях оптимизации, чтобы избежать столкновения системы рентгеновской визуализации и робототехнического устройства без ухудшения качества изображения.
Одним из этапов в рабочем процессе планирования является получение предварительной сканограммы. Предварительную сканограмму получают из выбранного вручную положения рамы C-типа, так же как это делается в обычной клинической практике. На следующем этапе вычисляется положение эндоскопа относительно дооперационных 3D изображений и/или интраоперационных поворотных рентгеновских изображений. Затем пользователь выбирает исследуемую область на изображениях эндоскопа, которую требуется визуализировать с помощью рамы C-типа для получения рентгеноскопических данных. В одном примере эта область может включать в себя коронарную артерию. После этого система вычисляет оптимальный протокол получения данных (или ряд протоколов получения данных, например, скрипт) для оптимальной траектории рамы C-типа. Критерии оптимизации могут включать в себя один или более из следующих критериев: избежание столкновения эндоскопа с источником/детектором; минимизация закрытия исследуемой области эндоскопом, максимизация видимого участка исследуемой области; минимизация дозы облучения и т.д.
В одном традиционном режиме работы рама C-типа используется для получения ряда дискретных 2D рентгеновских изображений, когда каждое поворотное положение рамы C-типа планируется оператором (рентгенологом, кардиологом и т.д.). В данном режиме время получения данных может быть весьма продолжительным, что может отрицательно сказываться на общем рабочем процессе. При использовании контрастного вещества, например в ходе операция коронарного шунтирования, контрастное вещество инъецируется для получения каждого изображения, что увеличивает риск осложнений, связанных с высокой дозой контрастного вещества. В другом традиционном режиме работы рама C-типа используется в режиме непрерывного вращения. Оператор планирует траекторию движения для системы визуализации и проводит полноповоротное сканирование. В данном режиме осуществляется получение множества изображений, что позволяет выполнить 3D реконструкцию. Кроме того, доза контрастного вещества может быть существенно снижена, поскольку инъекция контрастного вещества может проводиться только один раз. В третьем традиционном режиме работы рама C-типа используется при полноповоротном режиме, что позволяет осуществить полную 3D реконструкцию. Этот режим обычно называют конусно-лучевой компьютерной томографией (CT).
На практике известно, что планирование угловых расположений рамы C-типа в любом из вышеуказанных режимов представляет сложную и трудоемкую задачу. Для обеспечения планирования движения рамы C-типа с целью оптимального получения данных применяется множество инструментов программного обеспечения. Способы планирования траектории осуществляют оптимизацию параметров получения рентгеноскопических данных (угловых положений рамы C-типа) на основе требуемого вида, определяемого 3D изображениями или ранее полученными рентгеновскими изображениями, без учета специфики хирургических приспособлений, когда пациенту вводится эндоскоп (например, в грудную полость для проведения эндоскопической операции на сердце).
Согласно настоящим принципам осуществляется координация между множеством устройств в этих и других режимах визуализации, чтобы обеспечить достижение наилучшего изображения или ориентационного расположения для получения оптимальных результатов. В одном варианте осуществления при использовании эндоскопа в качестве основного устройства визуализации полезно сделать так, чтобы получение рентгеновских изображений проводился из изображений эндоскопа. Это в особенности полезно в ряде случаев. Например, в частном случае операции коронарного шунтирования, когда в организм вводится новая артерия (шунт), для проверки качества реваскуляризации проводится поворотное сканирование новой артерии. Это невозможно выполнить, используя дооперационные изображения, поскольку на этих изображениях данная артерия отсутствует.
Следует понимать, что настоящее изобретение будет описано в терминах медицинских инструментов; однако идеи настоящего изобретения распространяются значительно шире и применимы к любым инструментам сканирования или визуализации. В некоторых вариантах осуществления настоящие принципы применяются в отслеживании или анализе сложных биологических или механических систем. В частности, настоящие принципы применимы к внутренним процедурам отслеживания или визуализации биологических систем, к процедурам во всех областях организма, например в легких, желудочно-кишечном тракте, выделительных органах, кровеносных сосудах и т.д. В настоящих вариантах осуществления внимание сосредоточено на сочетании рентгеновского и эндоскопического контроля; однако это сочетание приведено лишь в качестве примера, поскольку могут использоваться другие устройства визуализации и их комбинации согласно настоящим принципам.
Элементы, описанные на Фигурах, могут быть реализованы в различных комбинациях аппаратного обеспечения и программного обеспечения и выполнять функции, объединенные в одном элементе или множестве элементов. Функции различных элементов, показанных на Фигурах, могут обеспечиваться посредством использования специализированного аппаратного обеспечения, а также аппаратного обеспечения, способного выполнять программы в сочетании с соответствующим программным обеспечением. В случае функций, выполняемых процессором, функции могут выполняться одним специализированным процессором, одним процессором общего назначения или множеством отдельных процессоров, некоторые из которых могут быть процессорами общего назначения. Кроме того, формальный термин "процессор" или "контроллер" не должен толковаться как относящийся исключительно к аппаратному обеспечению, способному выполнять программы, но также может в неявном виде означать, не ограничиваясь перечисленным, аппаратное обеспечение на базе процессора для цифровой обработки сигналов ("DSP"), постоянное запоминающее устройство ("ROM") для хранения программного обеспечения, запоминающее устройство с произвольной выборкой ("RAM"), энергонезависимое запоминающее устройство и т.д.
Помимо этого, все формулировки в настоящем описании, в которых излагаются принципы, аспекты и варианты осуществления изобретения, а также их конкретные примеры, охватывают как конструкционные, так и функциональные их эквиваленты. Кроме того, предполагается, что такие эквиваленты включают в себя как эквиваленты, известные в настоящее время, так и эквиваленты, которые будут разработаны в будущем (т.е. любые разработанные элементы, выполняющие ту же функцию, вне зависимости от конструкции). Таким образом, например, специалистам в данной области техники ясно, что блок-схемы, приведенные в настоящем описании, представляют концептуальные виды примеров компонентов системы и/или схемы, реализующих принципы изобретения. Точно так же следует понимать, что любые блок-схемы алгоритма, блок-схемы последовательности выполняемых операций и т.п. представляют различные процессы, которые могут быть по существу представлены на машиночитаемом носителе и выполняться компьютером или процессором, вне зависимости от того, показан ли такой компьютер или процессор в явном виде.
Помимо этого, варианты осуществления настоящего изобретения могут принимать вид компьютерного программного продукта, доступного из допускающего возможность использования компьютера или машиночитаемого носителя информации, предоставляющего программный код для использования компьютером или любой системой выполнения команд либо в связи с их использованием. В описательных целях допускающий возможность использования компьютера или машиночитаемый носитель информации может представлять собой любой инструмент, который может включать в себя, хранить, передавать, распространять или переносить программу для использования системой выполнения команд, инструментом или устройством либо в связи с их использованием. Носитель может представлять собой электронную, магнитную, оптическую, электромагнитную, инфракрасную или полупроводниковую систему (инструмент или устройство), либо среду распространения. В число примеров машиночитаемого носителя входят полупроводниковая или твердотельная память, магнитная лента, съемный компьютерный диск, запоминающее устройство с произвольной выборкой (RAM), постоянное запоминающее устройство (ROM), жесткий магнитный диск, а также оптический диск. В число примеров современных оптических дисков входят компакт-диск постоянной памяти (CD-ROM), компакт-диск с возможностью чтения/записи (CD-R/W), Blu-Ray™ и DVD.
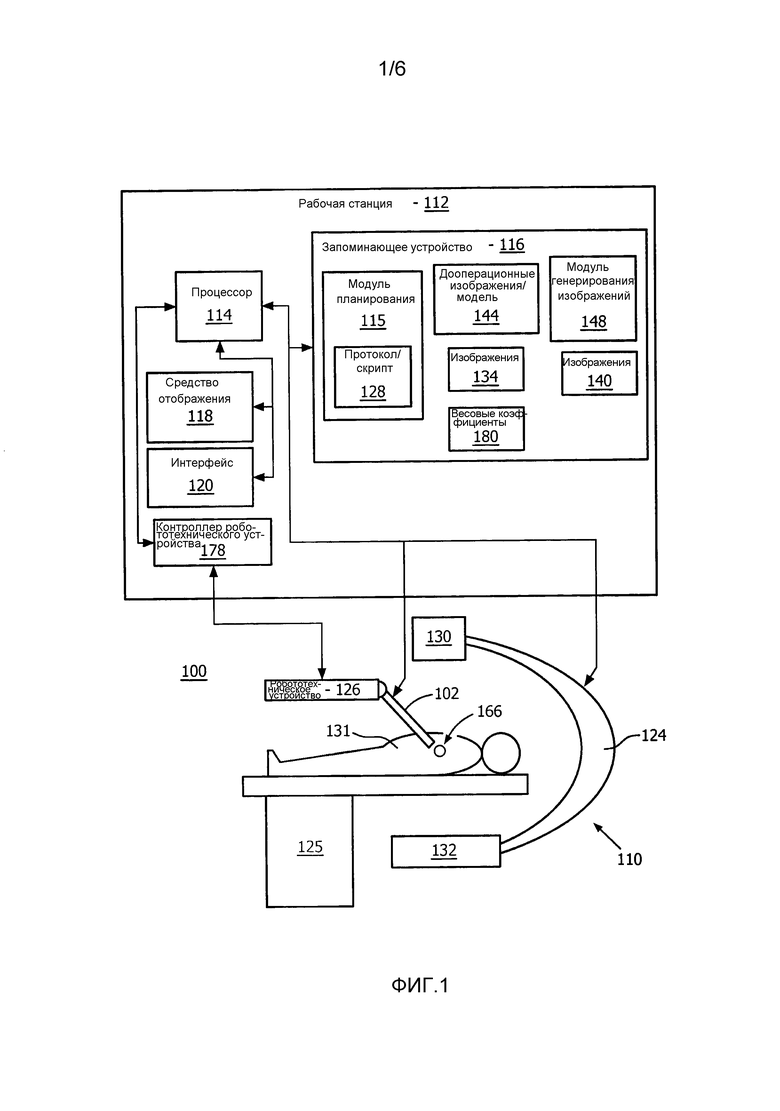
На чертежах одинаковые ссылочные позиции обозначают одинаковые или схожие элементы. На Фиг. 1 изображена система 100 для совместных средств визуализации согласно одному варианту осуществления. Система 100 представлена в качестве примера системы для проведения минимально инвазивных операций на сердце. Настоящие принципы могут использоваться для любого типа процедур, в том числе с применением эндоскопа или другого инструмента визуализации. Эндоскопические процедуры могут включать в себя, например, простатэктомию, гистерэктомию, артроскопию и т.д. Система 100 иллюстрирует интраоперационную установку для проведения минимально инвазивной операции на сердце в гибридной операционной. Система 100 может включать в себя рабочую станцию или консоль 112, с которой осуществляется контроль и/или управление процедурой. Рабочая станция 112 предпочтительно включает в себя один или более процессоров 114, а также запоминающее устройство 116 для хранения программ и приложений. В запоминающем устройстве 116 может храниться модуль 115 планирования, выполненный с возможностью координации или определения последовательности действий, осуществляемых множеством устройств или конструкций, задействованных в ходе проведения процедуры. В одном варианте осуществления модуль 115 планирования планирует перемещения одного или более инструментов или устройств. В одном варианте осуществления местоположения и перемещения рамы 124 C-типа для рентгеноскопии, эндоскопа (или другого инструмента), робототехнического устройства 126 (в качестве опции) либо другого устройства или других устройства могут быть предопределены с возможностью взаимодействия согласно настоящим принципам. Медицинское устройство или инструмент 102 может соединяться с робототехническим устройством 126 и управляться им либо может применяться в режиме ручного управления без использования робототехнического устройства 126. Медицинское устройство 102 может включать в себя катетер, проволочный направитель, зонд, эндоскоп, электрод, фильтровальное устройство, баллонное устройство или другой медицинский компонент. В особенно полезном варианте осуществления устройство 102 включает в себя устройство наблюдения или другое визуализирующее устройство для создания устройства визуализации.
В одном варианте осуществления рабочая станция 112 включает в себя модуль 148 генерирования изображения, выполненный с возможностью приема сигналов визуализации от одного или более из устройств визуализации, для визуализации объекта или объема 131 (пациента), изображенного на операционном столе. Изображение или изображения 134, 140, 144 пациента, например рентгеновские изображения, эндоскопические изображения, дооперационные изображения и т.д., могут отображаться на средстве 118 отображения. Рабочая станция 112 включает в себя средство 118 отображения для показа внутренних изображений объекта или объема (пациента) 131, а также может содержать изображение в виде наложенных изображений, сгенерированных и/или зарегистрированных модулем 148 генерирования изображения от множества средств, например рентгеновских, эндоскопических, дооперационных изображений и т.д. Средство 118 отображения может также позволить пользователю взаимодействовать с рабочей станцией 112, а также ее компонентами и функциональными составляющими, либо любым другим элементом в системе 100. Этому дополнительно способствует интерфейс 120, который может включать в себя клавиатуру, манипулятор типа «мышь», рычаг управления "джойстик", гаптическое устройство или любое другое периферийное или управляющее устройство, чтобы позволить пользователю взаимодействовать с рабочей станцией 112 в режиме обратной связи.
Модуль 115 планирования используется для планирования протокола или скрипта 128 получения данных рамой C-типа для рентгеноскопии, в частности угловых положений источника 130 рентгеновского излучения и детектора 132 рентгеновского излучения, на основе положения используемого во время операции эндоскопа или другого устройства 102 (например, ультразвукового зонда и т.д.). Оптимальное изображение или оптимальные изображения 134 анатомической структуры или исследуемой области 166 получают путем недопущения столкновения системы 110 рентгеновской визуализации с эндоскопом 102, недопущения закрытия объекта исследования, вызванного рассеянием рентгеновских лучей от эндоскопа 102, обеспечения распознавания исследуемой области 166, например сердца, из полученных в режиме реального времени эндоскопических изображений 140 (в дополнение к планированию на основе дооперационных изображений или модели 144).
В одном варианте осуществления эндоскоп 102 вводится в грудную полость пациента 131 для получения в режиме реального времени изображений 140 исследуемой области 166 (например, сердца) в ходе процедуры (например, операции шунтирования). Пациент располагается на операционном столе, после чего эндоскоп 102 вводят через ребра в грудную полость, обеспечивая визуализацию в режиме реального времени участка проведения операции. Раму C-типа 124 (установленную на потолке, на полу или в другом месте операционной, либо выполненную с возможностью передвижения на колесах) располагают вблизи пациента, так чтобы можно было визуализировать объект 166 исследования (сердце) для получения изображений 134.
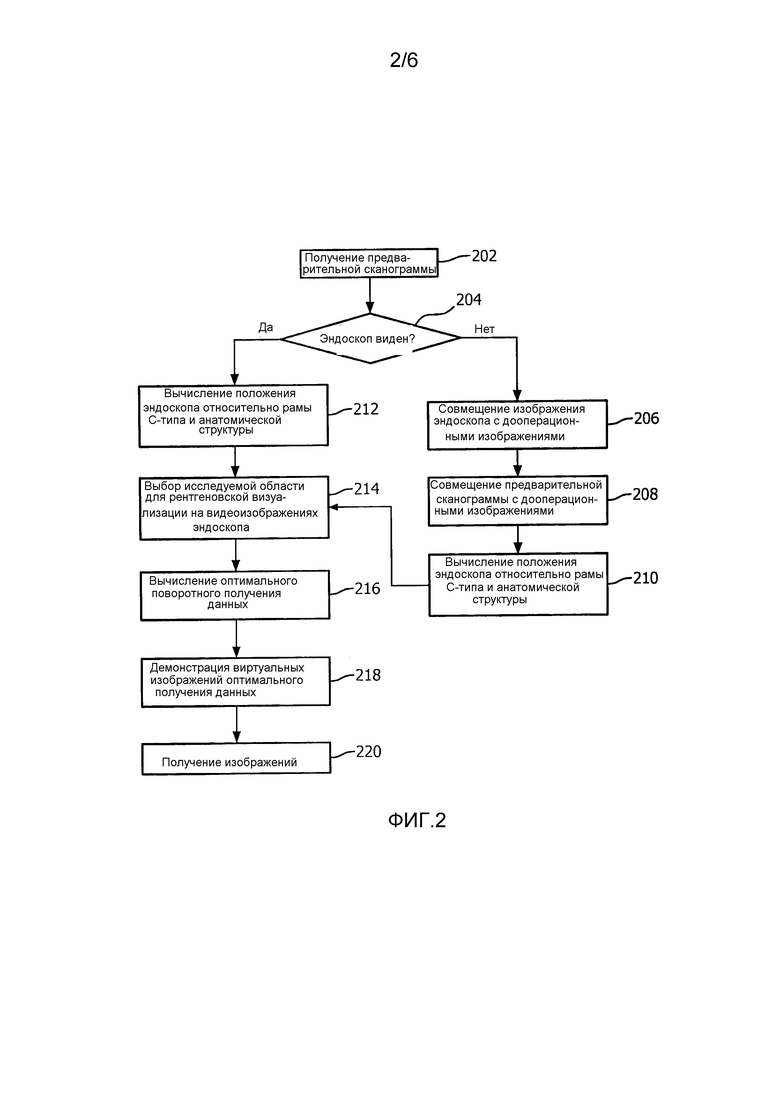
На Фиг. 2 описан способ планирования рабочего процесса согласно одному варианту осуществления. Планирование рабочего процесса осуществляется с использованием модуля 115 планирования (Фиг. 1). В блоке 202 предварительную сканограмму получают из выбранного вручную положения рамы C-типа, так же как в обычной клинической практике. В зависимости от выбранного ракурса проекции эндоскоп может быть виден или не виден на предварительной сканограмме. В блоке 204 принимается решение в отношении видимости эндоскопа. Если эндоскоп виден на предварительной сканограмме, можно определить положение эндоскопа относительно рамы C-типа. Чтобы это сделать, требуется знать 3D модель эндоскопа до начала операции. Кроме того, можно определить положение эндоскопа относительно анатомической структуры, используя 2D или 3D совмещение между рентгеновской и дооперационной 3D визуализацией (CT, MRI), как известно в данной области техники.
Если эндоскоп не виден на предварительной сканограмме, положение эндоскопа может быть вычислено косвенным путем из дооперационных 3D изображений, интраоперационных рентгеновских изображений и/или изображений эндоскопа. В блоке 206 совмещение эндоскопа с дооперационными изображениями может осуществляться путем детектирования парных точек на изображениях эндоскопа и дооперационных изображениях. Точно так же изображения эндоскопа могут совмещаться с рентгеновскими изображениями, используя тот же способ. В качестве альтернативы совмещение может выполняться с использованием других известных способов.
В блоке 208 устанавливается совмещение изображения эндоскопа с рентгеновским предварительным изображением и/или дооперационными 3D изображениями. В блоке 210 может быть вычислено положение эндоскопа относительно рамы C-типа, используя известные параметры системы технического зрения эндоскопа (фокусное расстояние камеры, размер пикселя и т.д.). Выполнение программы продолжается в блоке 214. Если в блоке 204 определено, что эндоскоп виден на предварительной сканограмме, тогда положение эндоскопа относительно рамы C-типа может быть вычислено, используя известные параметры системы технического зрения эндоскопа (фокусное расстояние камеры, размер пикселя и т.д.) в блоке 212.
В блоке 214 пользователь выбирает исследуемую область на изображениях эндоскопа, которую требуется визуализировать с помощью получения данных, выполняемых рамой C-типа для рентгеноскопии. Например, эта область может включать в себя коронарную артерию. В блоке 216 система далее вычисляет оптимальный протокол получения данных (или ряд протоколов получения данных), в частности, оптимальную траекторию рамы C-типа. В блоке 218 виртуальные изображения оптимального получения данных демонстрируются пользователю. В блоке 220 осуществляется получение оптимальных изображений, используя эндоскоп, связанный с рамой C-типа.
Блок 216 будет описан подробнее, снова со ссылкой на Фиг. 1. Может быть определен расчет оптимальной траектории рамы C-типа. Траектория рамы C-типа может определяться как некоторое множество N последовательных ориентационных расположений (например, с учетом трех степеней свободы рамы), где N > 0. В число входных параметров для модуля 115 планирования для определения траектории рамы C-типа могут входить следующие параметры. Заметим, что эти параметры могут использоваться в наборах из одного или более входных параметров, включающих те, что здесь упомянуты, или других, которые не упомянуты. В одном варианте осуществления пользователем может вводиться область, которую требуется исследовать (например, артерия). Она может включать координаты или другие подробности, о которых стало известно из дооперационной визуализации или предварительной сканограммы. Другой входной параметр может содержать положение эндоскопа, вычисленное по ориентиру, такому как рама C-типа или иная конструкция, как описано выше.
В качестве входного параметра может использоваться максимально разрешенная доза облучения. Это определяет продолжительность облучения или число изображений, которые могут быть собраны. В качестве входного параметра может использоваться предпочтительное направление наблюдения. Разные пользователи предпочитают разные ориентационные расположения, при этом разные пациенты могут иметь разные физиологические ограничения. Например, для визуализации венечной сосудистой системы некоторые операторы более предпочитают каудальный подход, в то время как некоторые более предпочитают краниальные углы. Могут выбираться различные режимы сканирования. Это может зависеть от некоторых других параметров (например, максимальной дозы) и типа применяемого оборудования. Режим сканирования может включать постоянный или периодическое получение данных, число углов, количество облучений, время облучения и т.д. Ориентация детектора также может служить входным параметром. Другие входные параметры, особенно те, что используются для описания положения или перемещения рамы C-типа, также включены в этот список.
Параметры на выходе модуля 115 планирования могут включать в себя множество ориентационных расположений, например, рентгеновского устройства 110, а также аналогичное множество смоделированных изображений, созданных при этих ориентационных расположениях. Модуль 115 планирования может моделировать любое количество возможных решений и позволить пользователю выбрать одно или более положений или ориентационных расположений. После того как положения и местонахождения рамы C-типа стали известны в виде функции времени, предоставляются критерии оптимизации для определения приемлемых положений и перемещений эндоскопа. В качестве альтернативы положения эндоскопа могут использоваться в качестве критерия для определения ориентационных расположений рамы C-типа 124 рентгеновского устройства 110.
В число критериев оптимизации могут входить следующие критерии. Столкновения между эндоскопом и источником 130, а также детектором 132 рамы C-типа требуется избежать. Поскольку положения рамы C-типа известны, положения эндоскопа 102 можно контролировать, и наоборот. Сравнение положений и перемещений может выполняться модулем 115 планирования в динамике по времени, чтобы убедиться в том, что одно и то же пространство не занято одновременно множеством устройств и что взаимные перемещения эндоскопа 102 и рамы C-типа 124 не приведут к столкновению или даже контакту. Точно так же расчет положений выполняется для решения следующих задач: минимизировать закрытие исследуемой области 166 эндоскопом 102 относительно источника 130 и детектора 132, максимизировать видимый участок исследуемой области 166. Кроме того, может приниматься во внимание доза облучения. Доза облучения может определяться в виде функциональной зависимости от положения на теле пациента. Слишком высокой радиации в одной области следует избегать. Критерии оптимизации используются для минимизации дозы облучения во всех областях, если существует такая возможность.
Кроме того, пользователь может определять порядок приоритетности или весовой коэффициент 180 критериев на основе предпочтений пользователя. Например, в некоторых случаях избежать закрытия может быть важнее, чем максимизировать исследуемую область. Весовые коэффициенты 180 могут масштабироваться для определения приоритетности оборудования и могут изменяться во времени при происхождении различных событий в ходе процедуры.
В одном варианте осуществления может использоваться робототехническое устройство 126 для управления положениями и перемещениями эндоскопа 102. Для управления робототехническим устройством 126 согласно модулю 115 планирования может использоваться контроллер 128 робототехнического устройства. Модуль 115 планирования может рассматривать робототехническое устройство 126 как часть эндоскопа 102, либо робототехническое устройство 126 может рассматриваться отдельно в качестве независимого объекта, для которого траектории рассчитываются так, чтобы избежать столкновений, и т.д.
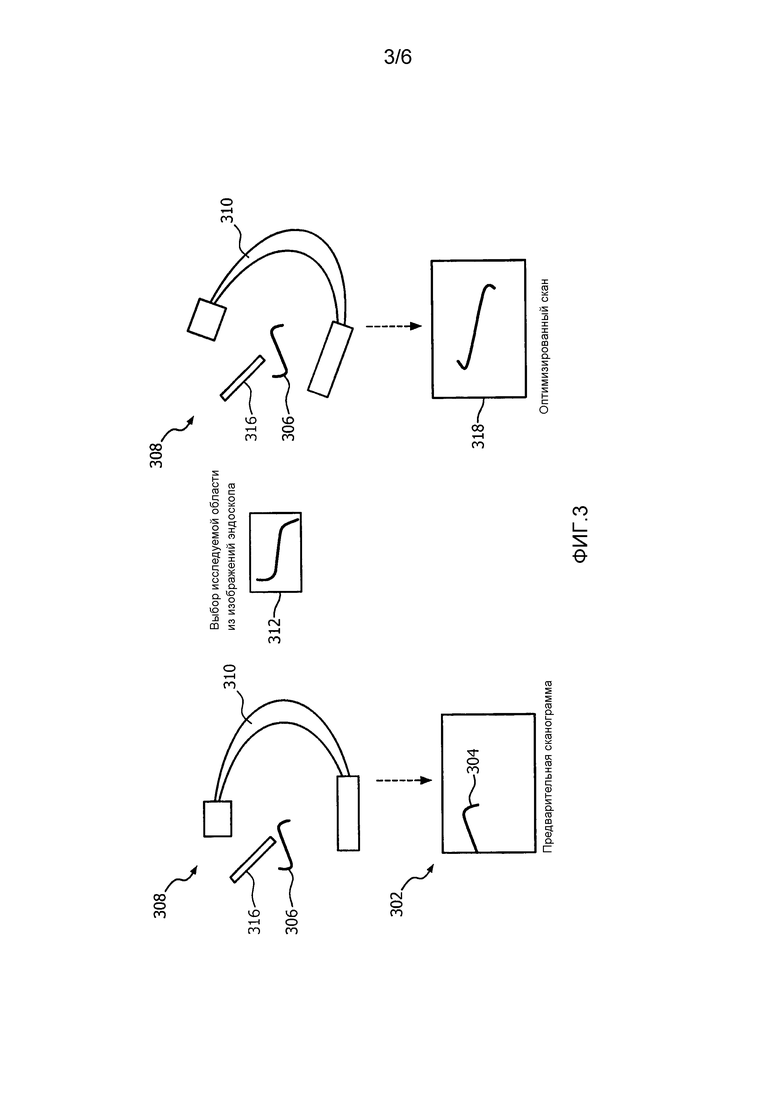
На Фиг. 3 показана схема, представляющая пример способа оптимизации для визуализации артерии на рентгеновских изображениях. На предварительной сканограмме 302 просматривается часть 304 артерии 306 благодаря субоптимальному ориентационному расположению или положению 308 рамы C-типа 310. Поскольку артерия 306 зрительно доступна на эндоскопическом виде 312 эндоскопа 316, пользователь выбирает эндоскопический вид 312, при этом алгоритм оптимизации предлагает новое ориентационное расположение 314 для рамы C-типа 310, чтобы улучшить визуализацию артерии 306. Заметим, что новая визуализация может выполняться не в той же плоскости, в которой лежит эндоскопический вид 312 (т.е. между эндоскопическим изображением 312 и оптимизированным сканом 318 существует иная проекция); однако вся исследуемая область зрительно доступна.
Алгоритм оптимизации для простоты будет описан в виде алгоритма поиска в ширину, но может быть расширен до любой схемы оптимизации, известной в данной области техники. Модуль 115 планирования (Фиг. 1) вычисляет все возможные траектории рамы C-типа и генерирует моделируемые изображения из дооперационного 3D массива данных (144), используя способы, известные в данной области техники. Модуль 115 планирования (Фиг. 1) дополнительно учитывает положения эндоскопа 316 для детектирования столкновения и закрытия, используя данные о перемещении эндоскопа. Далее могут быть использованы модели расчета рассеяния рентгеновских лучей от металлических объектов для расчета артефактов с целью обеспечения более точного планирования. Для каждого возможного вычисленного изображения (коррелирующего с ориентационными расположениями) рассчитываются критерии оптимизации, при этом результаты ранжируются (траектории, приводящие к столкновению, отбрасываются) на основе комбинации параметров и критериев ранжирования, создаваемых пользователем. Оптимальная траектория представляется пользователю. В качестве альтернативы модуль 115 планирования может представить любое количество траекторий, оптимизированных согласно различным критериям.
В то время как положение эндоскопа может учитываться непосредственно, как показано на Фиг. 3, в других вариантах осуществления эндоскоп может управляться робототехническим средством, чтобы расширить возможности визуализации. В таких вариантах осуществления положение робототехнического устройства также принимается во внимание. Если эндоскоп 316 управляется робототехническим средством, положения рамы C-типа 310 и робототехнического устройства могут объединяться в критериях оптимизации, чтобы избежать столкновения системы рентгеновской визуализации и робототехнического устройства без ухудшения качества изображения.
В вариантах осуществления, в которых анатомическая структура объекта изменяется в ходе процедуры, дооперационные изображения (144) могут по-прежнему использоваться для предоставления предлагаемых видов из рентгеновских изображений. Однако изображения не будут отражать новую анатомическую структуру, поскольку новая анатомическая структура не присутствовала в процессе получения дооперационных изображений. Этот недостаток можно преодолеть путем создания модели виртуального анатомического участка и добавления или вычитания виртуального анатомического участка по отношению к дооперационным изображениям. В одном примере вариант осуществления касается частного случая визуализации обходного сосудистого шунта, после того как сосудистый шунт помещен на пораженную коронарную артерию. В данном случае эта конкретная анатомическая структура на дооперационных изображениях отсутствует. Модель обходной артерии можно искусственно построить из изображений эндоскопа путем очерчивания вручную видимого участка артерии и искусственного добавления очерченной формы к 3D моделям из дооперационных изображений, принудительно установив заданные пользователем радиус и форму (например, прямоугольное сечение). Хотя точность такого решения будет ниже, чем в случае артерий, присутствующих на дооперационных изображениях, данный способ может позволить получить вполне адекватный протокол получения изображений.
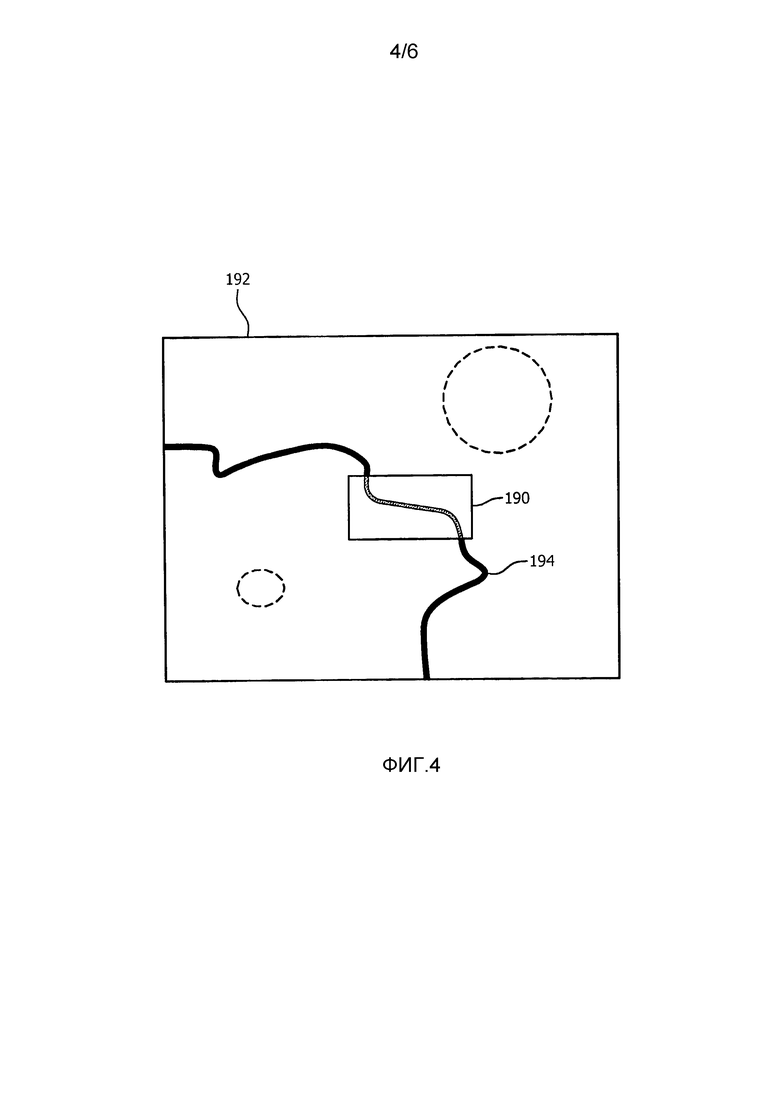
На Фиг. 4, может использоваться визуализация «картинка в картинке». В данном варианте осуществления положение плоскости эндоскопного изображения относительно предварительного рентгеновского изображения вычисляется, как описано выше. Система 115 планирования (Фиг. 1) далее вычисляет ориентационное расположение рамы C-типа, так чтобы плоскость визуализации совпадала с плоскостью визуализации эндоскопа. Поскольку эндоскоп закроет это изображение, система вычисляет новое положение эндоскопа, при котором закрытие будет минимальным, либо эндоскоп будет перемещен (что можно осуществить, использовав контроллер/систему 178 управления робототехнического устройства для перемещения робототехнического устройства 126 в новое положение (Фиг. 1)). После получения рентгеновского изображения эндоскоп может быть перемещен назад в свое исходное положение (например, с помощью робототехнического устройства 126). В результате выполнения такого протокола визуализация «картинка в картинке», при которой показано эндоскопическое видеоизображение 190 в режиме реального времени и расширенное рентгеновское изображение 192 поля обзора, может быть представлена пользователю. Эндоскопическое видеоизображение 190 может быть показано на фоне рентгеновского изображения 192 (и/или дооперационных изображений), чтобы предоставить более полное изображение исследуемой области (например, артерии 194).
На Фиг. 5A и 5B робототехническая система 502 удерживает эндоскоп 504 согласно настоящим принципам. Требуется, чтобы робототехническая система 502 избежала столкновения с рамой C-типа 506. Это может достигаться с использованием информации о положении робототехнической системы 502, чтобы убедиться, что она не находится на оптимизированной траектории рамы C-типа, не изменив положения или ориентации эндоскопа.
В одном варианте осуществления имеет место частный случай, когда эндоскоп 504 удерживается робототехнической системой 502 и может быть вовремя и точно удален из поля обзора при рентгеноскопии, а затем помещен обратно в то же самое место. Предшествующие варианты осуществления включают в себя критерии оптимизации, чтобы избежать столкновений с эндоскопом 504. В случае проведения интервенционной процедуры с использованием держателя эндоскопа, направляемого робототехническим устройством, или робототехнической системы 502 в критерии оптимизации может также потребоваться включить присутствие робототехнической системы 502. Эта задача может быть решена путем включения информации о положении робототехнического устройства в алгоритм оптимизации положения рамы C-типа, либо, если роботизированная система 502 обладает избыточной кинематикой, ее можно перемещать так, чтобы не допустить новых положений рамы C-типа 506, не изменив ориентации и положения эндоскопа.
Для включения положения робототехнического устройства в алгоритм оптимизации протокола перемещения рамы C-типа, роботизированная система 502 содержит систему координат, которая может совмещаться с системой координат рамы C-типа 506. Если эндоскоп 504 уже совмещен с рамой C-типа 506, и при этом роботизированная система 502 крепится к эндоскопу 504 известным способом, совмещение между координатными системами может осуществляться с использованием стандартных способов, принятых в робототехнике (например, трансформаций, обеспечивающих возможность совмещения). Когда это выполнено, кинематическая модель робототехнического устройства и положения сочленения роботизированной системы 502 могут быть использованы для расчета местоположения всей роботизированной системы 502 в системе координат рамы C-типа. Данная информация может быть включена в схему оптимизации положений рамы C-типа.
Для использования избыточной кинематики робототехнического устройства с целью обеспечения того, чтобы не произошло столкновения с рамой C-типа 506, положения рамы C-типа, вычисленные с использованием протоколов оптимизации, должны быть представлены в системе координат робототехнического устройства. После того, как это выполнено (тем же способом, который описан выше), кинематическая модель робототехнического устройства может вычислить положения роботизированной системы 502, так чтобы, не изменяя положения или ориентации эндоскопа, переместить роботизированную систему 502 с траектории рамы C-типа 506. Это можно видеть, сравнив Фиг. 5A с Фиг. 5B. На Фиг. 5A показана робототехническая система 502 относительно первого положения или ориентационного расположения рамы C-типа 506. На Фиг. 5B показано новое положение рамы C-типа 506 (например, совершившей поворот в направлении стрелки "A"). Робототехническая система 502 приняла новую конфигурацию, при которой ушла с пути рамы C-типа 506; однако эндоскоп 504 на Фиг. 5A и на Фиг. 5B остается в том же положении, несмотря на перемещение робототехнической системы 502, удерживающей эндоскоп 504.
Настоящие принципы обеспечивают совмещение между координатными системами устройств визуализации различных типов для построения плана перемещения визуализирующего аппаратного обеспечения с целью получения оптимальных углов обзора, избежания столкновений и получения наилучших результатов. Выбор целевых точек на изображении эндоскопа и перемещение рамы C-типа согласно некоторым критериям оптимизации улучшает визуализацию выбранной целевой анатомической структуры. Настоящие принципы могут быть использованы в любой операционной и особенно полезны в гибридных операционных, где применяются эндоскопы и рамы C-типа. В число процедур, где в особенности используются настоящие принципы, входит множество кардиологических, онкологических, нейрохирургических и других процедур. Настоящие принципы могут также распространяться на кабинеты, в которых мобильная рама C-типа используется совместно с эндоскопом, а также при других сценариях.
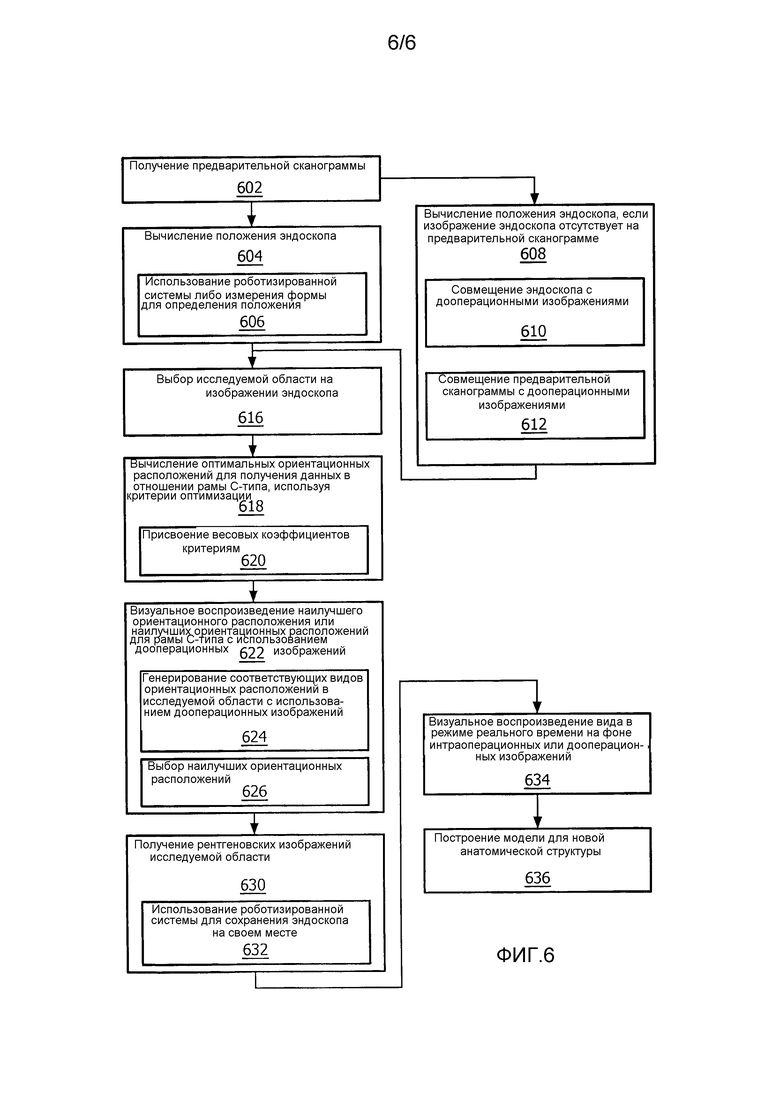
На Фиг. 6 описан способ получения данных при мультимодальной визуализации согласно примерам вариантов осуществления. В блоке 602 получают предварительную сканограмму с помощью рентгеноскопической системы (или другой системы визуализации), имеющей источник и детектор, расположенные на раме C-типа. В блоке 604 вычисляется положение эндоскопа (или положение другого устройства визуализации) относительно рамы C-типа. Это легко выполнить, если предварительная сканограмма включает в себя, по меньшей мере, участок эндоскопа, поскольку положение эндоскопа требуется знать. В одном варианте осуществления положения эндоскопа могут быть определены, используя роботизированную систему либо сенсорную систему, такую как оптоволоконная система измерения формы и пр., в блоке 606.
Если изображение эндоскопа отсутствует на предварительной сканограмме, положение эндоскопа требуется вычислить другим способом в блоке 608. В блоке 610 вид эндоскопа совмещается с дооперационными изображениями. В блоке 612 предварительная сканограмма совмещается с дооперационными изображениями для вычисления положения эндоскопа относительно рамы C-типа.
В блоке 616 на изображении эндоскопа выбирается исследуемая область для рентгеновской визуализации. В блоке 618 вычисляются оптимальные поворотные ориентационные расположения для получения данных в отношении рамы C-типа, используя критерии оптимизации для определения наилучшего ориентационное расположение или наилучших ориентационных расположений для исследуемой области. Критерии оптимизации могут включать в себя один или более из следующих критериев: избежание столкновения между эндоскопом и рамой C-типа; избежание закрытия исследуемой области, визуализация исследуемой области и/или контроль дозы облучения. Возможны и другие критерии. В блоке 620 критериям оптимизации могут быть присвоены весовые коэффициенты для установления приоритетности критериев оптимизации. Это может включать присвоение численного весового значения или обращения к критериям в заданной последовательности для получения требуемого результата.
В блоке 622 изображения наилучшего ориентационного расположения или наилучших ориентационных расположений визуально воспроизводятся на средстве отображения, чтобы позволить пользователю выбрать ориентационные положения для оптимизации плана. Изображения ориентационных расположений могут включать дооперационные изображения, полученные перед получением рентгеновских изображений. Это может включать в себя использование множества положений рамы C-типа для создания соответствующих видов исследуемой области из дооперационных изображений в блоке 624, а также выбор наилучшего ориентационного расположения или наилучших ориентационных расположений путем просмотра дооперационных изображений в блоке 626. Наилучшие ориентационные расположения могут включать в себя ориентационные расположения, предоставляющие полный вид исследуемой области, имеющие малое рассеяние рентгеновских лучей, создающие незакрытый вид исследуемой области, снижающие дозу облучения и т.д.
В блоке 630 осуществляется получение рентгеновских изображений исследуемой области в соответствии с оптимизированным планом. План оптимизации может реализоваться путем контролирования характера действий и положений устройств визуализации. В блоке 632 в процессе получения изображений роботизированная система выполнена с возможностью сохранения положения эндоскопа, при этом роботизированная система перемещается или изменяет свое положение, чтобы избежать столкновения с рамой C-типа, сохраняя при этом положение эндоскопа.
В блоке 634 может визуально воспроизводиться эндоскопический вид в режиме реального времени в соответствующем положении на фоновом рентгеновском изображении, чтобы предоставить пользователю более полное изображение. В блоке 636 может осуществляться построение модели изображения и другое визуальное воспроизведение изменения анатомической структуры и добавляться к дооперационным изображениям для учета анатомических изменений, выполненных в исследуемой области после получения дооперационных изображений. Эта модель может быть вычерчена врачом или как-то иначе введена в дооперационную 3D модель.
При интерпретации прилагаемой формулы изобретения следует понимать, что:
a) термин "содержащий" не исключает наличия других элементов или действий помимо перечисленных в соответствующем пункте формулы изобретения;
b) неопределенный артикль "a" или "an", предшествующий элементу, не исключает наличия множества таких элементов;
c) ни одна из ссылочных позиций в формуле изобретения не ограничивает объем ее притязаний;
d) несколько "средств" могут быть представлены одним и тем же элементом либо реализованной аппаратным обеспечением или программным обеспечением структурой или функцией;
e) предполагается, что соблюдение конкретной последовательности действий не требуется, если она не оговорена отдельно.
Представив описание предпочтительных вариантов осуществления планирования траектории рамы C-типа для оптимального получения изображений в эндоскопической хирургии (которые носят иллюстративный, но не ограничительный характер), следует отметить, что специалисты в данной области техники смогут внести различные изменения в свете вышеизложенных идей. Таким образом, следует понимать, что в конкретные варианты осуществления, приведенные в настоящем раскрытии, могут быть внесены изменения в объеме притязаний прилагаемой формулы изобретения. Таким образом, по представлению описания деталей и особенностей, как того требует патентный закон, изобретение, требующее правовой охраны, изложено в прилагаемой формуле изобретения.
Группа изобретений относится к области получения изображений. Система получения изображений содержит первое устройство (102) визуализации, выполненное с возможностью получения изображений объекта из по меньшей мере одного положения; второе устройство (124) визуализации, выполненное с возможностью получения изображений объекта из множества ориентационных расположений, выбранных на основе по меньшей мере одного положения первого устройства визуализации и в соответствии с критериями для обеспечения наилучшего ориентационного расположения или наилучших ориентационных расположений; модуль (115) планирования, сохраненный в запоминающем устройстве и выполненный с возможностью определения по меньшей мере одной траектории, позволяющей достичь наилучшего ориентационного расположения или наилучших ориентационных расположений второго устройства визуализации для получения совместно с первым устройством визуализации, изображения или изображений объекта. Учитывают один или более из следующих критериев: избежание столкновения между первым устройством визуализации и вторым устройством визуализации, избежание закрытия исследуемой области в объекте, визуализация исследуемой области и/или регулировка дозы облучения. Критериям присваиваются весовые коэффициенты (180) для установления приоритетности критериев. Техническим результатом является обеспечение упрощения планирования расположения рамы С-типа. 2 н. и 8 з.п. ф-лы, 7 ил.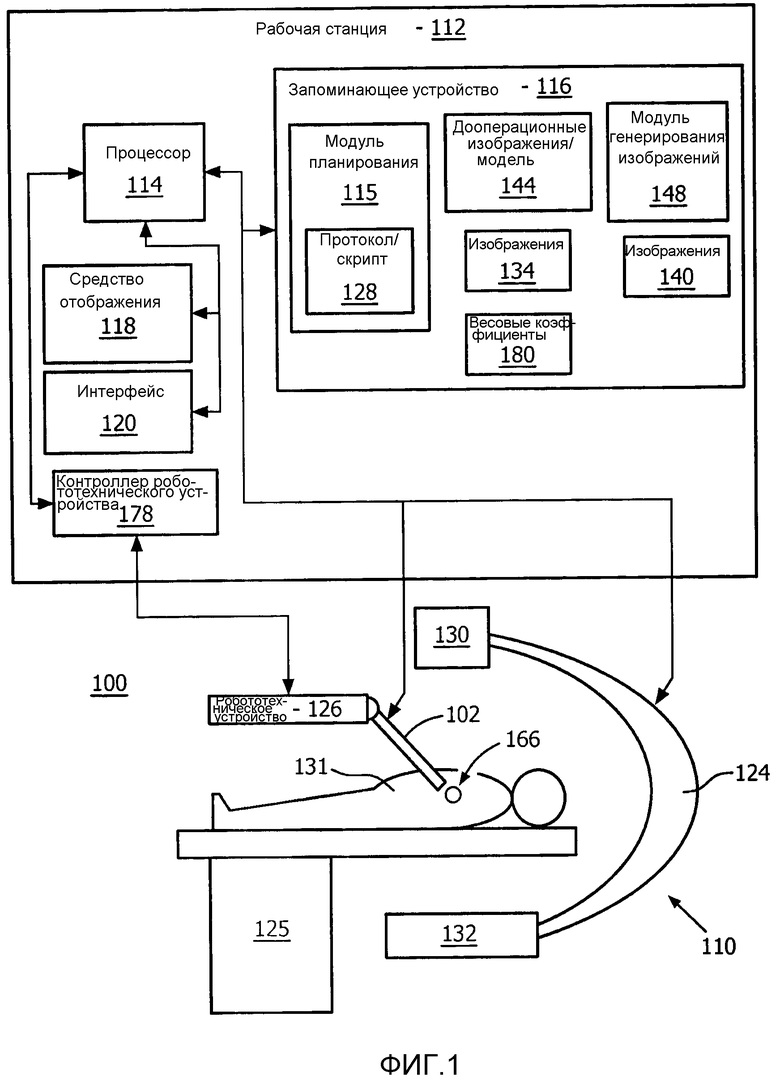
1. Система получения изображений, содержащая:
первое устройство (102) визуализации, выполненное с возможностью получения изображений объекта из по меньшей мере одного положения;
второе устройство (124) визуализации, выполненное с возможностью получения изображений объекта из множества ориентационных расположений, выбранных на основе по меньшей мере одного положения первого устройства визуализации и в соответствии с критериями для обеспечения наилучшего ориентационного расположения или наилучших ориентационных расположений; а также
модуль (115) планирования, сохраненный в запоминающем устройстве и выполненный с возможностью определения по меньшей мере одной траектории, позволяющей достичь наилучшего ориентационного расположения или наилучших ориентационных расположений второго устройства визуализации для получения совместно с первым устройством визуализации изображения или изображений объекта,
причем критерии включают в себя один или более из следующих критериев: избежание столкновения между первым устройством визуализации и вторым устройством визуализации, избежание закрытия исследуемой области в объекте, визуализация исследуемой области и/или регулировка дозы облучения,
причем критериям присваиваются весовые коэффициенты (180) для установления приоритетности критериев.
2. Система по п. 1, в которой первое устройство (102) для визуализации и второе устройство (124) для визуализации включают в себя систему рентгеновской визуализации и эндоскоп.
3. Система по п. 1, в которой первое устройство (102) визуализации включает в себя робототехническое устройство (126).
4. Система по п. 3, в которой роботизированная система (126) выполнена с возможностью сохранения положения первого устройства визуализации, при этом по меньшей мере одна траектория предоставляет информацию о перемещении в контроллер (178) робота, при этом роботизированная система перемещается, причем предупреждается столкновение со вторым устройством визуализации при его перемещении, сохраняя при этом положение первого устройства визуализации.
5. Система по п. 1, в которой по меньшей мере одна траектория включает в себя скрипт (128) для перемещения по меньшей мере второго устройства визуализации в ходе процедуры, при этом по меньшей мере одну траекторию получают с использованием дооперационных изображений.
6. Система получения изображений, содержащая:
эндоскоп (102), выполненный с возможностью осмотра исследуемой области из заданного положения;
рентгеноскопическую систему (110), имеющую источник и детектор, расположенные на раме C-типа, при этом движение рамы C-типа для рентгеноскопической системы (110) регулируется для получения изображений объекта из множества ориентационных положений путем перемещения рамы C-типа во множество ориентационных положений, выбранных на основании по меньшей мере одного положения эндоскопа; а также
модуль (115) планирования, сохраненный в запоминающем устройстве и выполненный с возможностью предоставления плана для совместного использования положения эндоскопа и ориентационных расположений рамы C-типа, чтобы оптимизировать вид для получения изображения или изображений объекта согласно критериям, и
робототехническое устройство (126), выполненное с возможностью перемещения и задания положения эндоскопа.
7. Система получения изображений по п. 6, в которой «критерии» включают в себя один или более из следующих критериев: избежание столкновения между эндоскопом и рамой C-типа; избежание закрытия исследуемой области в объекте, визуализация исследуемой области и/или регулировка дозы облучения.
8. Система получения изображений по п. 7, в которой критериям присваиваются весовые коэффициенты (180) для установления приоритетности критериев.
9. Система по п. 6, в которой робототехническое устройство (126) выполнено с возможностью сохранения положения эндоскопа, при этом план для совместного использования предоставляет информацию о перемещении в контроллер (178) робота, при этом робототехническое устройство перемещается, причем предупреждается столкновение с рамой C-типа при ее перемещении, сохраняя при этом положение эндоскопа.
10. Система получения изображений по п. 6, при этом план для совместного использования включает в себя скрипт (128) для перемещения рамы C-типа в ходе процедуры, при этом план для совместного использования составляется с использованием дооперационных изображений.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| US 6768496 B2, 27.07.2004 | |||
| US 7010080 B2, 07.03.2006 | |||
| US 20090264729 A1, 22.10.2009. | |||

