Область техники, к которой относится изобретение
Настоящее изобретение в целом относится к технологическим установкам и, в частности, к отслеживанию целостности компонентов технологической установки.
Раскрытие изобретения
Согласно одному варианту реализации способ указания потери сжимающего усилия содержит этапы, на которых:
принимают в системе обнаружения и определения местоположения неисправности первую последовательность измерений, выполненных в соединительном устройстве,
сохраняют указанную первую последовательность измерений,
принимают в системе обнаружения и определения местоположения неисправности вторую последовательность измерений, выполненных в соединительном устройстве,
сохраняют вторую последовательность измерений,
сравнивают первую последовательность измерений и вторую последовательность измерений и
генерируют указание, если первая последовательность измерений отличается от второй последовательности измерений.
Согласно другому варианту реализации способ указания потери сжимающего усилия содержит этапы, на которых принимают измерения импеданса, выполненные с использованием ряда электрических сигналов на ряде частот. Согласно другому варианту реализации способ содержит этап, на котором принимают измерения импеданса, выполненные на частотах, находящихся в целом в диапазоне от 30 кГц до 400 кГц. Согласно одному варианту реализации указанные частоте применяют к пьезоэлектрическому датчику, соединенному с соединительным устройством.
Согласно другому варианту реализации способ указания потери сжимающего усилия содержит этапы, на которых принимают измерения коэффициента отражения, выполненные при ряде длин волн. Согласно другому варианту реализации способ указания потери сжимающего усилия содержит этапы, на которых принимают измерения коэффициента отражения, выполненные при длине волны, находящейся в диапазоне от 0,1 нм до 106 нм. Согласно другому варианту реализации измерения коэффициента отражения выполняют с использованием датчика на основе волоконной решетки Брэгга, размещенного в уплотнении, расположенном в соединительном устройстве.
Краткое описание графических материалов
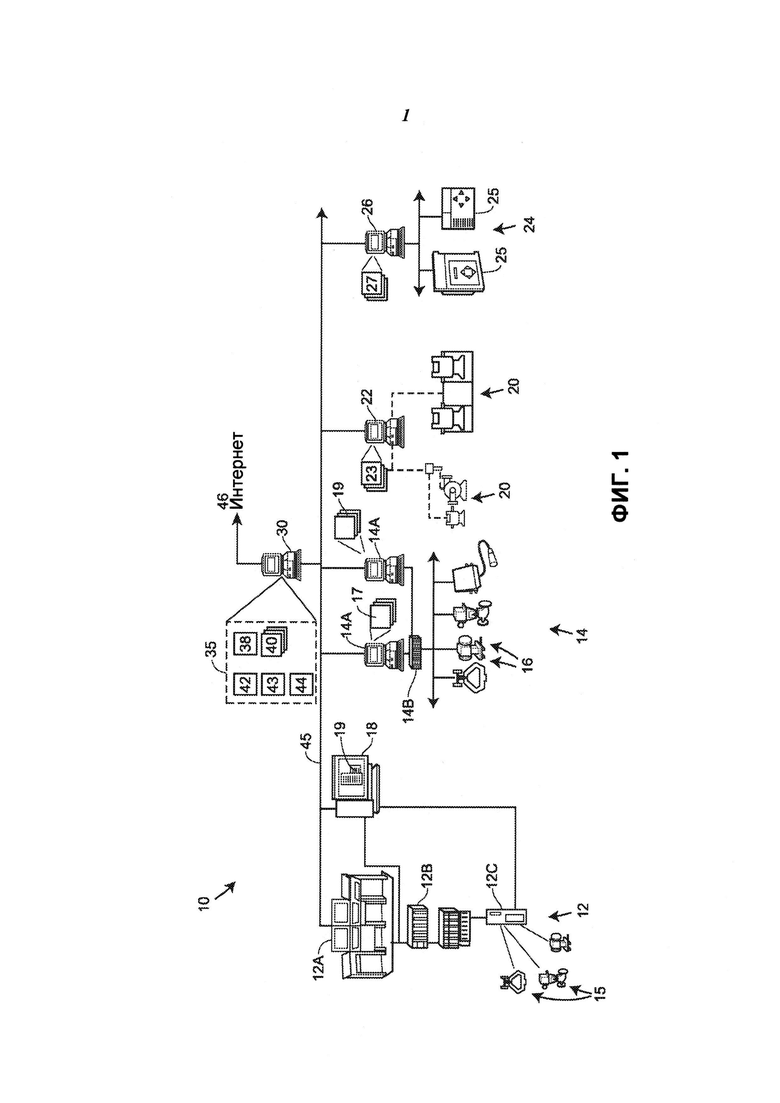
На фиг.1 показан пример структурной схемы технологической установки, имеющей распределенное управление и сеть обслуживания, включая одного или большее количество операторов, а также автоматизированные рабочие станции, контроллеры, периферийные устройства и поддерживающее оборудование, с использованием которых может быть реализована система обнаружения и определения местоположения неисправности.
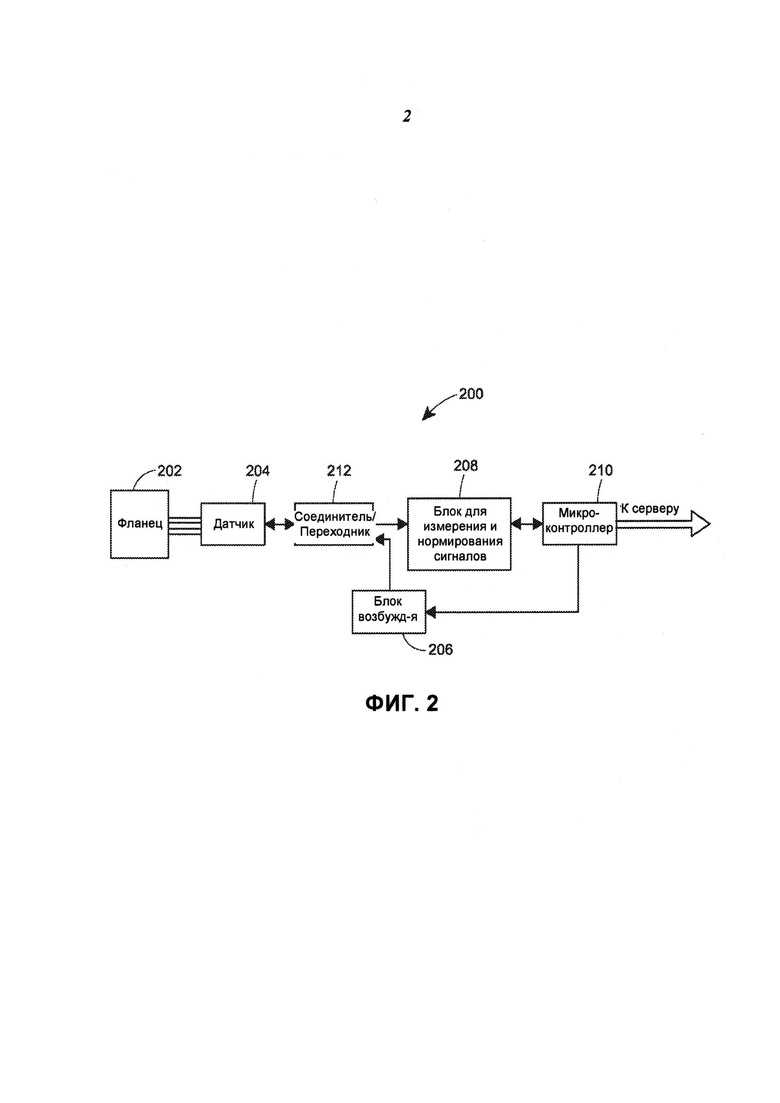
На фиг.2 показана структурная схема блока для сбора и анализа статистических данных, реализующая способ обнаружения потери сжимающего усилия в соединительном устройстве.
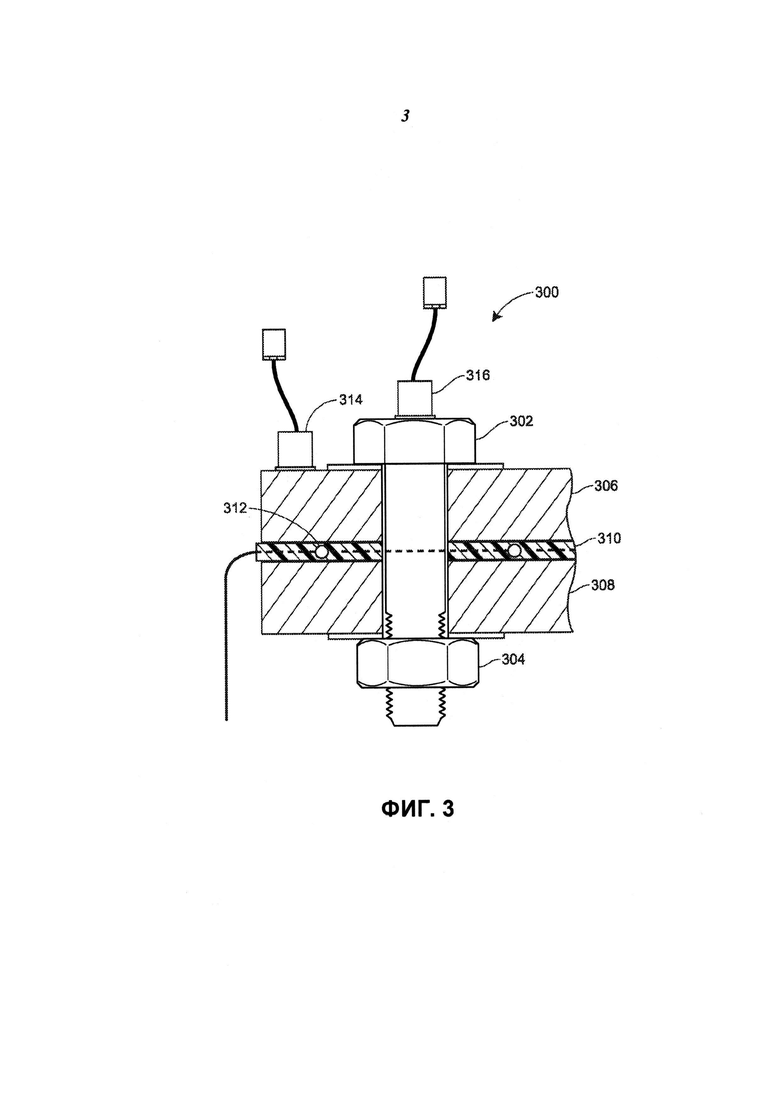
На фиг.3 показан разрез соединительного устройства, оснащенного датчиками для обнаружения потери сжимающего усилия в соединительном устройстве.
Осуществление изобретения
Как показано на фиг.1, технологическая установка 10 согласно одному варианту реализации, в которой может быть осуществлена система обнаружения и определения местоположения неисправности, содержит несколько управляющих и обслуживающих систем, соединенных с поддерживающим оборудованием посредством одной или большего количества коммуникационных сетей. В частности, технологическая установка 10, показанная на фиг.1, содержит одну или большее количество систем 12 и 14 управления технологическим процессом. Система 12 управления технологическим процессом может быть традиционной системой управления технологическим процессом, такой как системы PROVOX или RS3, или любая другая система управления, которая содержит операторский интерфейс 12А, соединенный с контроллером 12В и с картами 12С ввода-вывода (I/O), которые, в свою очередь, соединены с различными периферийными устройствами, такими как аналоговые устройства и периферийные устройства 15 с магистральными адресуемыми дистанционными преобразователями (HART®).
Система 14 управления технологическим процессом, которая может быть распределенной системой, содержит одно или большее количество операторских интерфейсов 14А, соединенных с одним или большим количеством распределенных контроллеров 14В посредством шины, такой как шина локальной сети Ethernet. Контроллеры 14В могут быть, например, контроллерами Delta VTM, имеющимися в продаже в компании Emerson Process Management (г. Остин, штат Техас), или контроллерами любого другого подходящего типа. Контроллеры 14В соединены посредством устройства ввода/вывода с одним или большим количеством периферийных устройств 16, таких как, например, преобразователь HART® или периферийные устройства с шиной Fieldbus, или любые другие интеллектуальные или неинтеллектуальные периферийные устройства, включая, например, устройства, в которых использован любой из протоколов PROFIBUS®, WORLDFIP®, Device-Net®, AS-lnterface и CAN. Как известно, периферийные устройства 16 могут передавать контроллерам 14В аналоговую или цифровую информацию, относящуюся к технологическим параметрам, а также информацию, относящуюся к другим устройствам. Для управления ходом процесса операторские интерфейсы 14А могут сохранять и исполнять команды, разрешенные управляющему технологическим процессом оператору, включая, например, управляющих оптимизаторов, диагностических экспертов, нейросети, наладчиков, и т.п.
Другие системы обслуживания, такие как компьютеры, исполняющие приложения автоматической системы контроля (AMS), или любые другие отслеживающие устройства и коммуникационные приложения могут быть соединены с системами 12 и 14 управления технологическим процессом или с индивидуальными устройствами в указанных системах для осуществления обслуживающих и отслеживающих операций. Например, обслуживающий компьютер 18 может быть соединен с контроллером 12В и/или с устройствами 15 посредством любых желательных коммуникационных линий или сетей (включая устройства беспроводных или мобильных сетей) для связи с ними и в некоторых случаях для реконфигурирования или осуществления других действий, относящихся к обслуживанию устройств 15. Схожим образом служебные приложения 17 и 19, такие как приложение AMS, могут быть установлены и исполнены в одном или большем количестве пользовательских интерфейсов 14А, связанных с распределенной системой 14 управления технологическим процессом, для выполнения обслуживающих и отслеживающих функций, включая сбор данных, относящихся к рабочим состояниям устройств 16.
Технологическая установка 10 также содержит различное вращающееся оборудование 20, такое как турбины, двигатели, и т.п., которые соединены с обслуживающим компьютером 22 посредством некоторых постоянных или временных линий связи (таких как шина, система беспроводной связи, или портативные устройства, которые соединяют с оборудованием 20 для считывания данных и затем удаляют).
Обслуживающий компьютер 22 может сохранять и исполнять известные отслеживающие и диагностические приложения 23, поставляемые, например, компанией CSI (Emerson Process Management Company), или любые другие известные приложения, используемые для диагностирования, отслеживания и оптимизации рабочего состояния вращающегося оборудования 20. Обслуживающий персонал обычно использует приложения 23 для поддерживания рабочих характеристик вращающегося оборудования 20 в установке 10 и наблюдения за ними, определения проблем, связанных с вращающимся оборудованием 20, и определения времени и необходимости ремонта или замены вращающегося оборудования 20. В некоторых случаях сторонние консультанты или сервисные организации могут временно получать или измерять данные, относящиеся к оборудованию 20, и использовать указанные данные для выполнения анализа оборудования 20 с целью обнаружения проблем, недостаточных рабочих характеристик или других проблем, возникших в оборудовании 20. В таких случаях компьютеры, с помощью которых выполняют указанный анализ, не могут быть соединены с остальной частью системы 10 посредством любых коммуникационных линий или могут быть соединены с ними только временно.
Схожим образом, система 24 генерации и распределения энергии, содержащая оборудование 25 для генерации и распределения энергии, связанная с установкой 10, соединена посредством, например, шины с другим компьютером 26, который работает и отслеживает работу оборудования 25 в установке 10. Компьютер 26 может исполнять известные управляющие энергией и диагностирующие приложения 27, такие как поставляемые, например, компаниями Liebert и ASCO, или другими компаниями, для управления оборудованием 25 и поддерживания указанного оборудования. Кроме того, во многих случаях сторонние консультанты или обслуживающие организации могут использовать сервисные приложения, которые временно получают или считывают данные, имеющие отношение к оборудованию 25, и используют указанные данные для выполнения исследований оборудования 25 с целью обнаружения проблем, недостаточных рабочих характеристик или других проблем, возникающих в оборудовании 25. В этих случаях компьютеры (такие как компьютер 26), с помощью которых выполняют исследования, не могут быть соединены с остальной частью системы 10 посредством любых коммуникационных линий или могут быть соединены только временно.
Как показано на фиг.1, компьютерная система 30 содержит по меньшей мере часть системы 35 обнаружения и определения местоположения неисправности (FDI), в которой использован анализ основных компонентов (РСА) на основании статистических характерных данных. Статистические характерные данные могут содержать помимо прочего результаты статистических измерений, такие как среднее значение, изменение среднего значения, срединное значение, изменение срединного значения, среднеквадратичное отклонение, изменение среднеквадратичного отклонения, дисперсия, асимметрия, эксцесс, среднеквадратичное значение (RMS), скорость изменения, диапазон, минимум, максимум и т.п. В частности компьютерная система 30 сохраняет и исполняет приложение 38, предназначенное для конфигурирования и сбора данных (CDCA), одно или большее количество приложений 40, модуль 42 анализа основных компонентов (РСА), который может содержать этапы статистической обработки и обеспечивает многомерный статистический анализ, а также модуль 44 обнаружения неисправностей.
Система 30 также сохраняет статистическую базу 43 данных отслеживания технологического процесса, в которой сохранены статистические характерные данные, сгенерированные в некоторых устройствах в указанном процессе. Вообще говоря, приложение 38, предназначенное для конфигурирования и сбора данных, конфигурирует и подключает каждый из множества блоков и анализа статистических данных (не показано на фиг.1), расположенных в периферийных устройствах 15, 16, контроллерах 12В, 14В, вращающемся оборудовании 20 или в обеспечивающем его поддержку компьютере 22, оборудовании 25 или в компьютере 26, а также в любых других желательных устройствах и оборудовании в технологической установке 10, для сбора таким образом статистических характерных данных (или в некоторых случаях исходных данных технологического процесса) из каждого из указанных блоков с целью осуществления обнаружения и определения местоположения неисправностей.
Приложение 38 для конфигурирования и сбора данных может быть коммуникативно соединено посредством аппаратной шины 45 с каждым из компьютеров или устройств в установке 10 или согласно другому варианту реализации может быть соединено посредством любого другого желательного коммуникационного средства, включая, например, беспроводные соединения, выделенные соединения с использованием сопряжения фаз оптических сигналов (ОРС), временные подключения, такие как, подключение переносных устройства для сбора данные, и т.п.
Аналогично, приложение 38 для конфигурирования и сбора данных может получать данные, имеющие отношение к периферийным устройствам и оборудованию в технологической установке 10 посредством локальной вычислительной сети или общедоступного соединения, такого как Интернет, телефонная линия и т.п., (как показано на фиг.1 в качестве Интернет-соединения 46), причем указанные данные могут быть собраны, например, сторонним поставщиком услуг. Кроме того, приложение 38 для конфигурирования и сбора данных может быть коммуникативно соединено с компьютерами/устройствами в установке 10 с использованием различных способов и/или протоколов, включая, например, сеть Ethernet, шину Modbus, протоколы HTML, XML, специализированные способы и протоколы, и т.п.
Таким образом, несмотря на то, что в настоящей заявке описаны конкретные варианты реализации, в которых использовано сопряжение фаз оптических сигналов (ОРС) для коммуникативного соединения приложения 38 для конфигурирования и сбора данных с компьютерами/устройствами в установке 10, специалисту может быть понятно, что также могут быть использованы различные другие способы соединения приложения 38 с компьютерами/устройствами в установке 10. Собранные данные могут быть справочными данными, связанными с известным нормальным или известным ненормальным состояниями технологического процесса, или отслеженными данными, для которых состояние технологического процесса является неизвестным. В приложении 38 для конфигурирования и сбора данных собранные данные в целом могут быть сохранены в базе 43 данных.
Несмотря на то, что технологическая установка 10 показана как содержащая систему 35 обнаружения и определения местоположения неисправности (FDI), следует понимать, что система 35 не ограничивается обнаружением существующих неисправностей или других ненормальных состояний, но также может предсказывать возникновение ненормального состояния, примеры которого дополнительно описаны ниже. Также, система FDI 35 может быть использована для обнаруживания существующих неисправностей и других ненормальных состояний в процессе в качестве части обнаружения и определения местоположения неисправностей для предсказания возникновения отказов и других ненормальных состояний в процессе в качестве части предотвращения ненормального состояния. Например, модуль 44 обнаружения неисправностей может быть использован для обнаружения существующих и предсказанных ненормальных состояний, как описано в настоящей заявке.
Кроме того, несмотря на то, что анализ основных компонентов прежде всего описан как многомерный способ статистического анализа, который может быть использован, подразумевается, что анализ основных компонентов используется только в качестве варианта реализации, и анализ основных компонентов описан в настоящей заявке для улучшенного понимания обнаружения неисправностей и используемого способа предотвращения ненормального состояния. Также могут быть использованы другие многомерные способы статистического анализа, включая помимо прочего способ частных наименьших квадратов (PLS), способ регрессии основных компонентов (PCR), дискриминантный анализ и канонический анализ варьируемой величины (CVA). Различные способы многомерного статистического анализа могут быть использованы в зависимости от обнаруживаемого ненормального состояния. Например, в то время как анализ основных компонентов может быть использован как для обнаружения и для предсказывания ненормальных состояний, а анализ основных компонентов может быть использован для обнаружения возникновения ненормальных состояний, способ частных наименьших квадратов и/или способ регрессии основных компонентов могут быть использованы для предсказания возникновения ненормальных состояний. Кроме того, система 35 обнаружения и определения местоположения неисправности может содержать дополнительные модули для различных способов многомерного анализа, и/или модуль 42 анализа основных компонентов (РСА) может быть заменен модулем частных наименьших квадратов, модулем регрессии основных компонентов, модулем дискриминантного анализа, модулем анализа канонической величины или любым другим модулем многомерного статистического анализа.
Как показано на фиг.1, после того как приложение 38 для конфигурирования и сбора данных соберет данные о статистических характеристиках (или исходных технологических параметрах), модуль 42 анализа основных компонентов может провести многомерный статистический анализ для обработки указанных данные одним из нескольких способов. Модуль 42 анализа основных компонентов может использовать собранные статистические характерные данные в качестве справочных данных, связанных с нормальными условиями и одним или большим количеством ненормальных состояний, для определения основных компонентов, связанных с двумя и большим количеством состояний процесса, и формирования матрицы нагружения, связанной с комбинированными состояниями. Согласно другому варианту реализации в модуле 42 анализа основных компонентов (РСА) собранные статистические характерные данные могут быть использованы в качестве справочных данных, связанных с нормальным или ненормальным состоянием процесса, для определения основных компонентов, связанных с состоянием процесса, и формирования матрицы нагружения, связанной с каждым состоянием.
В модуле 42 анализа основных компонентов также могут быть использованы исходные данные о технологических параметрах, если они связаны с известным нормальным или известным ненормальным состоянием процесса, для вычисления эталонных статистических характерных данных, необходимых для определения основных компонентов, связанных с одним или большим количеством технологических режимов. Данные об исходных технологических параметрах могут содержать помимо прочего данные, полученные в результате измерения параметров процесса, включая данные, измеренные в устройствах, участвующих в процессе, такие как температура, давление, расход, положение и т.п. Модуль 42 анализа основных компонентов дополнительно может сохранять результаты анализа основных компонентов, а также эталонные статистические характерные данные в базе 43 данных для использования модулем 44 обнаружения неисправности или приложением 40. Кроме того, модуль 42 анализа основных компонентов может определять с использованием параллельного анализа или другого подобного способа, сколько основных компонентов, вычисленных модулем 42 анализа основных компонентов, необходимо держать под наблюдением модуля 44 обнаружения неисправности.
Модуль 44 обнаружения неисправностей анализирует отслеженные данные о статистических характеристиках (или исходных технологических параметрах) с использованием результатов основного анализа компонентов, выполненного модулем 42 анализа основных компонентов, для определения наличия или будущего наличия аварийного состояния процесса. Как подробно описано ниже, модуль 44 обнаружения неисправностей может передать отслеженную статистическую характеристику или исходные данные о технологических параметрах в оценочную матрицу с использованием матрицы нагружения, предварительно определенной модулем 42 анализа основных компонентов. Затем модуль 44 обнаружения неисправности может сгенерировать один или большее количество сигналов тревоги или предупреждений об опасности для операторов или обслуживающего персонала на основании результатов анализа или предупредить иным способом операторов процесса или обслуживающий персонал, что ненормальное состояние уже существует или может возникнуть. Схожим образом, модуль 44 обнаружения неисправности может сохранять результаты анализа, включая обнаруженные неисправности, сгенерированные сигналы тревоги или предупреждения об опасности, а также данные, переданные в оценочную матрицу (описанную ниже), в базу 43 данных, или может передать указанные результаты приложению 40.
Приложение 40 для обеспечения просмотра и интерфейса содержит интерфейс для персонала установки, такого как инженеры по конфигурированию, операторы управления технологическим процессом, обслуживающий персонал, начальники смен, диспетчеры и т.п., для просмотра сигналов тревоги и аварийных предупреждений, сгенерированных модулем 44 обнаружения неисправности. Приложение 40 для обеспечения просмотра также может содержать интерфейс, который обеспечивает возможность манипулирования различными параметрами управления технологическим процессом, манипулирования модулем 42 анализа основных компонентов и модулем 44 обнаружения неисправности и отображения соответствующих данных, включая статистические характерные данные, исходные данные о технологических параметрах, данные, подвергнутые автомасштабированию, данные, отображенные на оценочных матрицах, или любые другие данные, пригодные для использования при отображении для персонала установки.
Приложение 40 для обеспечения просмотра и интерфейса может предоставить графический пользовательский интерфейс (GUI), который интегрирован с системой 30, или, в частности, с системой 35 обнаружения и определения местоположения неисправности, для облегчения взаимодействия пользователя с отслеживающими средствами, предоставленными системой 35 обнаружения и определения местоположения неисправности. Однако перед подробным описанием графического интерфейса пользователя следует отметить, что графический интерфейс пользователя может содержать одно или большее количество программ, написанных с использованием любых подходящих языков и способов программирования. Кроме того, программы, реализующие графический интерфейс пользователя, могут сохраняться и исполняться в одиночной технологической установке или блоке, таком как, например, автоматизированное рабочее место, контроллер, и т.п., в установке 10, или согласно другому варианту реализации программы графического интерфейса пользователя могут сохраняться и исполняться распределенным способом с использованием множества процессоров, которые коммуникативно соединены друг с другом в пределах системы 35 обнаружения и определения местоположения неисправности.
Предпочтительно, но не обязательно, графический интерфейс пользователя может быть реализован с использованием известной графической оконной структуры и внешнего представления, в которых множество связанных графических экранов или страниц содержат одно или большее количество выпадающих меню, которые предоставляют пользователю возможность перемещения по страницам желательным способом для просмотра и/или извлечения конкретной информации. Особенности и/или возможности системы 35 обнаружения и определения местоположения неисправности могут быть показаны, открыты для доступа, использованы и т.п. посредством одной или большего количества соответствующих страниц, видов или экранов графического интерфейса пользователя. Кроме того, различные экраны, формирующие графический интерфейс пользователя, могут быть связаны логическим способом для облегчения быстрой и интуитивной навигации пользователя по указанным экранам для извлечения конкретной информации или получения доступа к конкретному средству системы 35 обнаружения и определения местоположения неисправности и/или использования указанного конкретного средства.
Специалисту может быть понятно, что система 35 обнаружения и определения местоположения неисправности, описанная в настоящей заявке, может работать одна или совместно с другими системами, включая другие системы обнаружения неисправности и предотвращения ненормального состояния системы. Схожим образом, отдельные приложения 38, 40, 42 и 44, описанные в настоящей заявке в качестве части системы 35 обнаружения и определения положения неисправности, могут работать совместно с другими приложениями (не показаны) для обнаружения неисправности, генерирования сигналов тревоги и предупреждений об опасности, предоставления данных персоналу установки, предоставления возможности конфигурирования процесса или устройств, или любой комбинации вышеуказанного.
Как показано на фиг.1, клапаны 15 и 16, например, могут быть соединены с внешними трубопроводами и оборудованием, управляющим технологическим процессом, посредством крепежных элементов, таких как болты. Согласно одному варианту реализации между соединительными поверхностями или, например, фланцами клапанов и соединительными поверхностями внешнего оборудования, управляющего технологическим процессом, может быть размещено уплотнение. Согласно данному варианту реализации указанные соединительные поверхности снабжены отверстиями, в которых могут быть размещены крепежные элементы, такие как болты. Согласно данному варианту реализации на снабженный резьбой конец болта может быть навинчена гайка.
Согласно некоторым вариантам реализации болт и соответствующая гайка могут быть затянуты с заданными крутящим моментом или усилием. Согласно таким вариантам реализации гайка и головка болта прикладывают силу к соединительным поверхностям, например фланцам. Затяжка гайки и/или болта может быть ослаблена, например, из-за рабочей среды, технологического режима, срока эксплуатации и ошибки обслуживающего персонала. Согласно данному варианту реализации сила, приложенная к соединительным поверхностям головкой болта и гайкой, может изменяться. Это приводит к потере сжимающего усилия. Такой эффект называется потерей предварительной нагрузки на болтовое соединение. Потеря предварительной нагрузки повышает риск отказа уплотнения.
В некоторых случаях фланец клапана 15, например, может быть снабжен датчиками для измерения силы, приложенной гайкой и болтом, например, к фланцу. Такие датчики содержат помимо прочего пьезоэлектрические (PZT) датчики, например датчики на основе волоконной решетки Брэгга (FBG). В некоторых случаях указанные датчики могут быть соединены с фланцем. В других случаях фланец может быть изготовлены с датчиком во фланце. В таких случаях фланец может быть снабжен каналом для доступа к датчику. Согласно другим вариантам реализации датчик на основе волоконной решетки Брэгга может быть расположен в уплотнении, вставленном между соединительными поверхностями, которые удерживаются на месте крепежным элементом. В этом случае уплотнение может быть выполнено с возможностью размещения в нем, например, датчика на основе волоконной решетки Брэгга и обеспечения доступа к указанному датчику.
Согласно другим вариантам реализации клапан 15 может быть соединен с клапанными стыковочными фланцами. Согласно некоторым вариантам реализации клапан 15 может быть соединен с оборудованием технологической установки с использованием соединения типа ʺкорпус-крышкаʺ. Согласно другим вариантам реализации технологическим оборудованием можно управлять посредством исполнительно-приводных механизмов. В этих случаях исполнительно-приводные механизмы сопряжены с технологическим оборудованием, включая клапаны, в которых корпус мембраны соединен с исполнительно-приводным механизмом.
В случаях, описанных выше, датчик на основе волоконной решетки Брэгга или импедансный датчик могут быть расположены в клапанном стыковочном фланце с использованием способов, описанных выше. Согласно некоторым другим вариантам реализации датчик на основе волоконной решетки Брэгга или импедансный датчик могут быть использованы в соединении типа ʺкорпус-крышкаʺ. Согласно другим вариантам реализации датчик на основе волоконной решетки Брэгга или импедансный датчик могут быть использованы в соединении корпуса мембраны с исполнительно-приводным механизмом.
В некоторых случаях датчики отслеживаются и управляются блоками сбора и анализа статистических данных, которые могут быть расположены, например, в установочных приспособлениях клапана или корпусах 15 клапана. В этом случае датчик снабжен шинным разъемом, выполненным с возможностью приема электропитания, инициирующих сигналов и передачи электрических данных от датчика в блок для сбора данных. В других случаях датчики, например, могут отслеживаться и управляться картами 12С ввода/вывода. В некоторых случаях данные, принятые блоком для сбора и анализа данных, также принимаются системой 35 обнаружения и определения местоположения неисправности.
В случаях, в которых датчик на основе волоконной решетки Брэгга используется, например, в уплотнении, инициирующий сигнал содержит свет с характерной длиной волны. Датчик на основе волоконной решетки Брэгга измеряет уровень света, отраженного от решеток датчика Брэгга. Потеря предварительной нагрузки на болт смещает коэффициент преломления решеток в датчике Брэгга. Изменение коэффициента преломления датчика на основе волоконной решетки Брэгга изменяет уровень света, отраженного на характерной длине волны. Изменение уровня отраженного света, принятого с характерной длиной волны, согласно одному варианту реализации указывает на потерю предварительной нагрузки на болт. Согласно некоторым вариантам реализации степень изменения уровня отраженного света соответствует уменьшению сжимающей силы в соединительном устройстве.
Согласно некоторым вариантам реализации модуль 42 анализа основных компонентов анализирует данные, принятые от датчика, соединенного с фланцем клапана. Согласно данному варианту реализации модуль 42 анализа основных компонентов обеспечивает в режиме реального времени отслеживание нагрузки, приложенной крепежным элементом к фланцу клапана. Обнаружение потери предварительной нагрузки или ослабления крепежного элемента может быть автоматизировано посредством модуля 42 анализа основных компонентов без необходимости визуальной проверки крепежного элемента. Модуль 42 анализа основных компонентов согласно данному варианту реализации создает характеристику на основании данных, принятых от датчика, соединенного с фланцем клапана. Согласно другим вариантам реализации данные от размещенного на фланце датчика анализируются, например, системой стратегии управления аварией.
На фиг.2 показана структурная схема блока для сбора и анализа статистических данных, расположенного в периферийных устройствах 15, 16, например, которая осуществляет вариант 200 реализации, например, для обнаружения потери предварительной нагрузки крепежного элемента во фланце клапана 16. Согласно одному варианту реализации датчик 204 является пьезоэлектрическим (PZT) датчиком. Пьезоэлектрический датчик 204 соединен с фланцем 202 клапана с использованием подходящего способа соединения. Пьезоэлектрический датчик 204 выполнен из пьезокерамического материала, такого как цирконат-титанат свинца согласно данному варианту реализации. Специалисту понятно, что в качестве датчика может быть использован любой материал, создающий пьезоэлектрический эффект. Согласно данному варианту реализации пьезоэлектрический датчик 204 припаян к фланцу 202. Согласно другим вариантам реализации датчик 204 соединен с фланцем 202 посредством связующего материала или адгезива. Согласно другим вариантам реализации датчик 204 встроен во фланец 202 клапана. Согласно данному варианту реализации доступ к датчику 204 обеспечен посредством соединителя 212.
Блок 204 возбуждения (ЕМ) передает в пьезоэлектрический датчик 204 сигнал с частотой возбуждения. Микроконтроллер 210 управляет блоком 204 возбуждения. Согласно данному варианту реализации микроконтроллер 210 связан с блоком 204 возбуждения посредством последовательной шины 12С. Блок 204 возбуждения выполнен с возможностью генерирования электрических сигналов, частоты которых согласно данному варианту реализации находятся в диапазоне 30-400 кГц. Согласно данному варианту реализации микроконтроллер 210 сообщает блоку 204 возбуждения о необходимой частоте генерируемого возбуждения. Кроме того, согласно данному варианту реализации микроконтроллер 210 сообщает блоку 204 возбуждения о необходимом уровне напряжения электрических сигналов, которые должны генерироваться блоком 204 возбуждения. Согласно другому варианту реализации микроконтроллер 210 сообщает блоку 204 возбуждения о диапазоне частот возбуждения, которые должны генерироваться. Согласно данному варианту реализации блок 204 возбуждения последовательно генерирует электрические сигналы, имеющие частоты возбуждения, соответствующие диапазону частот возбуждения, назначенному микроконтроллером.
Согласно одному варианту реализации блок 204 возбуждения содержит цифроаналоговый преобразователь (DAC), электрический соединенный с управляемым напряжением генератором (VCO). Согласно данному варианту реализации цифроаналоговый преобразователь принимает цифровое представление частоты возбуждения от микроконтроллера 210. Цифроаналоговый преобразователь формирует аналоговое напряжение, которое соответствует частоте возбуждения электрического сигнала для генерирования. Управляемый напряжением генератор генерирует сигнал с частотой возбуждения, которая согласно данному варианту реализации соответствует аналоговому напряжению, сформированному цифроаналоговым преобразователем. Согласно другим вариантам реализации блок 204 возбуждения выполнен с возможностью генерирования комплекса электрических сигналов, имеющих две или большее количество частот возбуждения.
При приеме электрического сигнала от блока 204 возбуждения пьезоэлектрический датчик 204 генерирует электрический ток, который соответствует импедансу, измеренному в комбинированном пьезоэлектрическом датчике 204, фланца 202 и крепежного элемента (не показан). Электрический ток, сгенерированный пьезоэлектрическим датчиком 204, изменяется в соответствии с изменением частоты возбуждения электрического сигнала, сгенерированного блоком 204 возбуждения.
Электрический ток, сгенерированный пьезоэлектрическим датчиком 204, принимается блоком 208 измерения и нормирования сигналов (SCMU). Блок 208 измерения и нормирования сигналов соединен с микроконтроллером 210 посредством последовательной шины 12С. Микроконтроллер 210 передает блоку 208 измерения и нормирования сигналов команду измерить в качестве пробы электрический ток, сгенерированный пьезоэлектрическим датчиком 204. Блок 208 измерения и нормирования сигналов содержит электронную схему и оборудование для согласования сигнала. Такая электронная схема содержит помимо прочего преобразователи тока в напряжение, малошумящие усилители (МШУ), полосовые и заграждающие фильтры. Специалисту понятно, что измеренный импеданс содержит активную и реактивную составляющие. Согласно данному варианту реализации блок 208 измерения и нормирования сигналов генерирует цифровое представление активной компоненты электрического тока, которая соответствует импедансу комбинации пьезоэлектрического датчика 204, фланца 202 клапана и крепежного элемента. Цифровое представление импеданса комбинированных пьезоэлектрического датчика 204, фланца 202 клапана и крепежного элемента передается в микроконтроллер 210. Согласно одному варианту реализации блок 208 измерения и нормирования сигналов содержит аналогово-цифровой преобразователь (АЦП). Согласно данному варианту реализации аналогово-цифровой преобразователь представляет собой аналогово-цифровой преобразователь последовательных приближений. Согласно другому варианту реализации может быть использован АЦП с двойным интегрированием.
Согласно одному варианту реализации микроконтроллер 210 сообщает блоку 206 возбуждения о необходимой частоте возбуждения электрического сигнала для его генерирования. Блок 206 возбуждения генерирует электрический сигнал с указанной частотой возбуждения и передает указанный электрический сигнал пьезоэлектрическому датчику 204. Микроконтроллер 210 передает команду блоку 208 измерения и нормирования сигналов взять пробу электрического тока, сгенерированного пьезоэлектрическим датчиком 204, в ответ на указанный электрический сигнал. Цифровое представление принимается микроконтроллером 210. Микроконтроллер 210 сообщает блоку 206 возбуждения о другой частоте возбуждения для генерирования электрического сигнала и передает блоку 208 измерения и нормирования сигналов команду взять пробу электрического тока, сгенерированного пьезоэлектрическим датчиком 204 в ответ на принятый электрический сигнал о генерировании другой частоты возбуждения. Согласно данному варианту реализации микроконтроллер последовательно сообщает блоку 206 возбуждения о частотах возбуждения, которые находятся в диапазоне 30-400 кГц с шагом 1 кГц, например 30 кГц, 31 кГц, 399 кГц и 400 кГц. После сообщения блоку 206 возбуждения о каждой частоте возбуждения микроконтроллер 202 передает блоку 208 измерения и нормирования сигналов команду взять пробу электрического тока, сгенерированного пьезоэлектрическим датчиком 204 в ответ на прием электрического сигнала для генерирования на другой частоте возбуждения. Таким образом, микроконтроллер 210 создает запись импеданса для комбинированных пьезоэлектрического датчика 204, фланца 202 клапана и крепежного элемента, а также соответствующих частот возбуждения для электрических сигналов, сгенерированных блоком 206 возбуждения.
Как показано на фиг.1, согласно данному варианту реализации микроконтроллер 210 передает указанную запись, содержащую измеренные импедансы и соответствующие им частоты возбуждения, вычислительной системе 30. Согласно данному варианту реализации микроконтроллер 210 реализует протокол локальной сети контроллеров (CAN) для соединения с вычислительной системой 30. Согласно данному варианту реализации приложение 38 для конфигурирования и сбора данных, действующее в качестве части системы 35 обнаружения и определения местоположения неисправности, которая в свою является частью вычислительной системы 30, передает микроконтроллеру 210 команду создать запись импеданса. Приложение 38 для конфигурирования и сбора данных извещает микроконтроллер 210 о начале подачи частоты возбуждения, окончании подачи частоты возбуждения и пошаговых изменениях частоты. Приложение 38 для конфигурирования и сбора данных принимает запись импеданса от микроконтроллера 210. Согласно данному варианту реализации приложение 38 сохраняет запись импеданса в базе 43 данных.
Модуль 42 анализа основных компонентов (РСА) извлекает сохраненную запись импеданса из базы 43 данных и применяет способы аппроксимации кривых по точкам к записи импеданса. Согласно одному варианту реализации модуль 42 анализа основных компонентов генерирует аппроксимацию с помощью полинома, имеющего n-й порядок данной записи импеданса. Модуль 42 анализа основных компонентов сохраняет коэффициенты сгенерированного полинома в базе 43 данных 43. Согласно одному варианту реализации указанные коэффициенты соответствуют, например, характеристике импеданса фланца 202. Согласно другому варианту реализации запись импеданса, например, служит характеристикой импеданса фланца 202.
Согласно одному варианту реализации приложение 38 для конфигурирования и сбора данных периодически передает команду микроконтроллеру 210 создать запись импеданса. Приложение 38 для конфигурирования и сбора данных принимает запись импеданса от микроконтроллера 210.
Согласно одному варианту реализации приложение 38 для конфигурирования и сбора данных принимает запись импеданса и извлекает предварительную сохраненную запись импеданса, например, для фланца 202. Согласно данному варианту реализации приложение 38 для конфигурирования и сбора данных передает принятую запись импеданса и извлеченную запись импеданса в модуль 42 анализа основных компонентов. Модуль 42 анализа основных компонентов сравнивает записи импеданса для обнаружения изменения в характеристике импеданса. Согласно одному варианту реализации заводская запись импеданса сравнивается с новой записью импеданса. Согласно одному варианту реализации изменение сигнализирует об отклонении коэффициентов, вычисленных для аппроксимации с помощью полинома записи импеданса, от заданных порогов для указанных коэффициентов. Согласно некоторым вариантам реализации модуль 42 анализа основных компонентов вычисляет среднее значение из архивных записей импеданса, сохраненных в базе 43 данных, например, для фланца 202. Среднее значение записей импеданса сравнивается с принятой записью импеданса для обнаружения отклонения от указанного среднего значения. Согласно другим вариантам реализации модуль 42 анализа основных компонентов вычисляет среднеквадратичное отклонение записи импеданса, принятой от приложения 38 для конфигурирования и сбора данных, от архивных записей импеданса, сохраненных в базе 43 данных.
Согласно данному варианту реализации пользователь определяет пороговое значение среднеквадратичного отклонения в приложении 40, которое встроено в систему 30, или, более конкретно, в систему 35 обнаружения и определения местоположения неисправности. Если принятая запись импеданса выходит за пределы заданного пользователем порога, согласно данному варианту реализации генерируется указание в форме визуальной подсказки и звукового сигнала. Согласно данному варианту реализации отклонение указывает на потерю предварительной нагрузки или сжимающей силы на фланце 202 из-за ослабления болта.
Согласно одному варианту реализации пользователь посредством приложения 40 дает команду микроконтроллеру 210 создать запись импеданса. Согласно некоторым вариантам реализации система 35 обнаружения и определения местоположения неисправности предоставляет пользователю указание, соответствующее, например, сроку службы фланца 202. Согласно данному варианту реализации данное указание предоставляется посредством приложения 40.
Согласно другому варианту реализации датчик 204 является датчиком на основе волоконной решетки Брэгга. Датчик на основе волоконной решетки Брэгга содержит стеклянное волокно, которое изготовлено с решетками, вытравленными в сердечнике стеклянного волокна. Коэффициент преломления решеток датчика Брэгга выбран с возможностью отражения света с характерной длиной волны. При сжатии датчика на основе волоконной решетки Брэгга вдоль его оси, например, изменяется коэффициент преломления решеток. Согласно другим вариантам реализации изменения температуры окружающей среды вызывают изменение коэффициента преломления решеток.
В каждом случае изменение коэффициента преломления сдвигает характерную длину волны света, который отражается в решетках. В этом случае датчик на основе волоконной решетки Брэгга может быть использован для измерения силы, приложенной крепежным элементом, использованным для соединения фланца клапана, например, с соединительными элементами оборудования, управляющего технологическим процессом. Как описано выше, датчик на основе волоконной решетки Брэгга может быть использован, например, в мембране исполнительно-приводного механизма.
Согласно одному варианту реализации датчик 204 расположен в уплотнении между фланцами. Блок 206 возбуждения согласно данному варианту реализации содержит источник света. Источник света выполнен с возможностью генерации света в широком диапазоне длин волн. Длины волн генерируемого света могут находиться в диапазоне от инфракрасной области (IR), в видимой области и до ультрафиолетовой области (UV). Согласно другому варианту реализации источником света является источник лазерного излучения одиночной длины волны. Свет, генерируемый блоком 206 возбуждения, согласно данному варианту реализации в варианте реализации передается в датчик на основе волоконной решетки Брэгга посредством подходящего соединителя или переходника 212. Согласно данному варианту реализации соединитель 212 также выполнен с возможностью размещения в нем светочувствительного элемента. Светочувствительные элементы включают помимо прочего фотодиоды, фототранзисторы, фоторезисторы или подходящие преобразователи любого другого типа, выполненные с возможностью преобразования света в электрический сигнал. Согласно некоторым вариантам реализации интенсивность света может быть модулирована.
Согласно некоторым вариантам реализации между светочувствительным элементом и датчиком на основе волоконной решетки Брэгга может быть вставлен модуль светофильтра. Светофильтр выборочно пропускает свет в некотором диапазоне длин волн. Модуль светофильтра может содержать множество выбираемых светофильтров, каждый из которых выборочно пропускает свет в различных диапазонах длин волн. Согласно некоторым вариантам реализации указанные диапазоны длин волн перекрывают друг друга. Согласно данному варианту реализации микроконтроллер 210 последовательно настраивает модуль светофильтра для выбора различных светофильтров. После каждой настройки микроконтроллер 210 запускает блок 208 измерения и нормирования сигналов для приема электрического сигнала, сгенерированного светочувствительным элементом. Сгенерированный электрический сигнал соответствует уровню света в диапазоне длин волн, принятых светочувствительным элементом. Разумеется, диапазон длин волн согласно данному варианту реализации соответствует выбранному светофильтру. Согласно одному варианту реализации микроконтроллер 210 генерирует запись коэффициента отражения на основании измерений, выполненных блоком измерения и нормирования сигналов в различных диапазонах длин волн. Запись коэффициента отражения может включать интенсивность света, принятого в датчике, для различных диапазонов длин волн. Согласно некоторым вариантам реализации микроконтроллер может принять указание о температуре во фланце. Согласно данному варианту реализации микроконтроллер 210 компенсирует изменения, вызванные температурными изменениями, уровня сигнала отраженного света.
Как показано на фиг.1, согласно данному варианту реализации микроконтроллер 210 передает указанную запись, содержащую измерения коэффициента отражения и соответствующие им длины волн вычислительной системе 30. Согласно данному варианту реализации микроконтроллер 210 реализует протокол локальной сети контроллеров (CAN) для соединения с вычислительной системой 30. Согласно данному варианту реализации приложение 38 для конфигурирования и сбора данных, действующее в качестве части системы 35 обнаружения и определения местоположения неисправности, которая в свою является частью вычислительной системы 30, передает микроконтроллеру 210 команду создать запись коэффициента отражения. Приложение 38 для конфигурирования и сбора данных извещает микроконтроллер 210 о начале подачи частоты возбуждения, окончании подачи частоты возбуждения и пошаговых изменениях частоты. Приложение 38 для конфигурирования и сбора данных принимает запись коэффициента отражения от микроконтроллера 210. Согласно данному варианту реализации приложение 38 сохраняет запись коэффициента отражения в базе 43 данных.
Модуль 42 анализа основных компонентов (РСА) извлекает сохраненную запись коэффициента отражения из базы 43 данных и применяет способы аппроксимации кривых по точкам к записи коэффициента отражения. Согласно одному варианту реализации модуль 42 анализа основных компонентов генерирует полиномиальную аппроксимацию n-го порядка данной записи коэффициента отражения. Модуль 42 анализа основных компонентов сохраняет коэффициенты сгенерированного полиномиала в базе 43 данных. Согласно одному варианту реализации указанные коэффициенты соответствуют, например, характеристике коэффициента отражения фланца 202. Согласно другому варианту реализации запись коэффициента отражения, например, служит характеристикой коэффициента отражения фланца 202.
Согласно одному варианту реализации приложение 38 для конфигурирования и сбора данных периодически передает команду микроконтроллеру 210 создать запись коэффициента отражения. Приложение 38 для конфигурирования и сбора данных принимает запись коэффициента отражения от микроконтроллера 210.
Согласно одному варианту реализации приложение 38 для конфигурирования и сбора данных принимает запись коэффициента отражения и извлекает предварительную сохраненную запись коэффициента отражения, например, для фланца 202. Согласно данному варианту реализации приложение 38 для конфигурирования и сбора данных передает принятую запись коэффициента отражения и извлеченную запись коэффициента отражения в модуль 42 анализа основных компонентов. Модуль 42 анализа основных компонентов сравнивает записи коэффициента отражения для обнаружения изменения в характеристике коэффициента отражения. Согласно одному варианту реализации изменение сигнализирует об отклонении коэффициентов, вычисленных для полиномиальной аппроксимации записи коэффициента отражения, от заданных порогов для указанных коэффициентов. Согласно некоторым вариантам реализации модуль 42 анализа основных компонентов вычисляет среднее значение из архивных записей коэффициента отражения, сохраненных в базе 43 данных, например, для фланца 202. Среднее значение записей коэффициента отражения сравнивается с принятой записью коэффициента отражения для обнаружения отклонения от указанного среднего значения. Согласно другим вариантам реализации модуль 42 анализа основных компонентов вычисляет среднеквадратичное отклонение записи коэффициента отражения, принятой от приложения 38 для конфигурирования и сбора данных, от архивных записей коэффициента отражения, сохраненных в базе 43 данных.
Согласно данному варианту реализации пользователь определяет пороговое значение среднеквадратичного отклонения в приложении 40, которое встроено в систему 30, или, более конкретно, в систему 35 обнаружения и определения местоположения неисправности. Если принятая запись коэффициента отражения выходит за пределы заданного пользователем порога, согласно данному варианту реализации генерируется указание в форме визуальной подсказки и звукового сигнала. Согласно данному варианту реализации отклонение указывает на потерю предварительной нагрузки на фланец 202 из-за ослабления болтового соединения.
Согласно одному варианту реализации пользователь посредством приложения 40 дает команду микроконтроллеру 210 создать запись коэффициента отражения. Согласно некоторым вариантам реализации система 35 обнаружения и определения местоположения неисправности предоставляет пользователю указание, соответствующее, например, сроку службы фланца 202. Согласно данному варианту реализации данное указание предоставляется посредством приложения 40.
На фиг.3 показано соединительное устройство 300 согласно одному варианту реализации, содержащее болт 302, гайку 304, соединительные поверхности 306, 308 и уплотнение 310. Согласно данному варианту реализации датчик 312 на основе волоконной решетки Брэгга размещен в уплотнении 310, расположенном между соединительными поверхностями 306 и 308. Коэффициент отражения датчика 312 изменяется при уменьшении сжимающей силы, приложенной к соединительным поверхностям 306 и 308 болтом 302 и гайкой 304. Как показано на фиг.1, система 35 обнаружения и определения местоположения неисправности обнаруживает это изменение коэффициента отражения. Пьезоэлектрические датчики 314 и 316 прикреплены к соединительной поверхности 306 и болту 302 соответственно. Измерения импеданса, принятые от датчиков 314 и 316, согласно данному варианту реализации указывают на потерю сжимающего усилия. Согласно некоторым вариантам реализации либо один, либо только некоторые из датчиков 312, 314 или 316 могут быть расположены в соединительном устройстве.
Согласно другим вариантам реализации пьезоэлектрический датчик и датчик на основе волоконной решетки Брэгга изготовлены в форме шайб или уплотнения. Согласно данным вариантам реализации шайбы расположены между поверхностями соединительного устройства. Способы, описанные в настоящей заявке, также могут быть использованы для обнаружения потери сжимающего усилия, действующего на уплотнение или мембрану, использованные в технологической установке. Варианты реализации, описанные в настоящей заявке, также могут быть использованы для обнаружения ослабления других соединительных устройств, обычно используемых в технологических установках, включая, например, помимо прочего соединители штоков, область контргайки траверсы в исполнительно-приводных механизмах или фланцы для болтового соединения.
Согласно другим вариантам реализации система 35 обнаружения и определения местоположения неисправности может интерпретировать результаты измерений коэффициента отражения для определения температуры соединительной поверхности, в которой размещен датчик на основе волоконной решетки Брэгга. Согласно другим вариантам реализации отчеты с результатами измерений импеданса или коэффициента отражения могут интерпретироваться системой 35 обнаружения и определения местоположения неисправности для задания крутящего момента, который применяют к крепежному элементу в соединительной поверхности, когда, например, клапан 15 впервые монтируют в технологическую установку. Согласно данному варианту реализации может быть создан отчет о ненадлежащем состоянии крепления.
Согласно другим вариантам реализации в соединительных устройствах могут быть использованы тензодатчики для определения усилий болтового соединения трубопроводов или внутренние давления корпуса клапана. Как показано на фиг.2, датчик 204 согласно данным вариантам реализации содержит преобразователь, выполненной с возможностью измерения, например деформации или давления.
Согласно некоторым вариантам реализации система 35 обнаружения и определения местоположения неисправности исполняет калибрующие подпрограммы для обеспечения возможности генерации коэффициента отражения или импеданса при первой установке клапана 15. Согласно одному варианту реализации калибровочная подпрограмма является компонентом общей программы калибровки клапана.
Варианты реализации, описанные выше, со ссылкой на гайку и болт также могут быть использованы для указания изменения характеристик соединения крышки клапана/уплотнения. Согласно некоторым другим вариантам реализации, описанным выше, может быть осуществлено отслеживание целостности соединения корпуса пневматического привода. Согласно таким вариантам реализации может быть использован датчик на основе волоконной решетки Брэгга, который содержит пневматическую мембрану, защемленную между двумя половинами корпуса исполнительно-приводного механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОЦЕНКИ ЦЕЛОСТНОСТИ ОБОРУДОВАНИЯ, УПРАВЛЯЮЩЕГО ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ | 2012 |
|
RU2611985C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ХРАНЕНИЯ ЭЛЕКТРОЛИТА И ОБНАРУЖЕНИЯ НЕИСПРАВНОСТЕЙ В ПРОТОЧНЫХ БАТАРЕЯХ | 2017 |
|
RU2747794C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПОДВОДНЫХ СИГНАЛОВ | 2012 |
|
RU2603438C2 |
| Способ и устройство для выполнения синхронизированных векторных измерений | 2019 |
|
RU2788340C2 |
| СПОСОБ И СИСТЕМА ПРЕОБРАЗОВАТЕЛЬНОГО БЛОКА УЛЬТРАЗВУКОВОГО РАСХОДОМЕРА | 2011 |
|
RU2532611C2 |
| ПРОВЕРКА ПРАВИЛЬНОСТИ РАСХОДОМЕРА | 2011 |
|
RU2560139C2 |
| ПОРТАТИВНЫЕ УСТРОЙСТВА ДЛЯ МАГНИТОИНДУКЦИОННОЙ ТОМОГРАФИИ | 2016 |
|
RU2711205C2 |
| СПОСОБ И УСТРОЙСТВО МОНИТОРИНГА РАСТВОРЕНИЯ | 2018 |
|
RU2755869C1 |
| ВОЛОКОННО-ОПТИЧЕСКОЕ ЗОНДИРОВАНИЕ ФОРМЫ ОБОРУДОВАНИЯ НИЗА БУРИЛЬНОЙ КОЛОННЫ | 2013 |
|
RU2636989C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ПОЛЕВЫМ УСТРОЙСТВОМ | 2015 |
|
RU2685241C2 |
Изобретения относятся к области машиностроения, в частности к контролирующим системам, и могут быть использованы для отслеживания целостности компонентов технологической установки. Предложен способ, согласно которому в технологической установке принимают первую последовательность измерений коэффициента отражения корпуса клапана, сохраняют указанную первую последовательность измерений коэффициента отражения, принимают вторую последовательность измерений коэффициента отражения корпуса клапана, сохраняют указанную вторую последовательность измерений коэффициента отражения, сравнивают первую и вторую последовательности измерений коэффициента отражения и генерируют указание о потере сжимающего усилия, если первая последовательность измерений отличается от второй последовательности измерений. Устройство содержит систему обнаружения и определения неисправности, датчик, расположенный в соединительном устройстве, блок возбуждения, соединенный с датчиком, и измерительный модуль, соединенный с датчиком. 3 н. и 32 з.п. ф-лы, 3 ил. 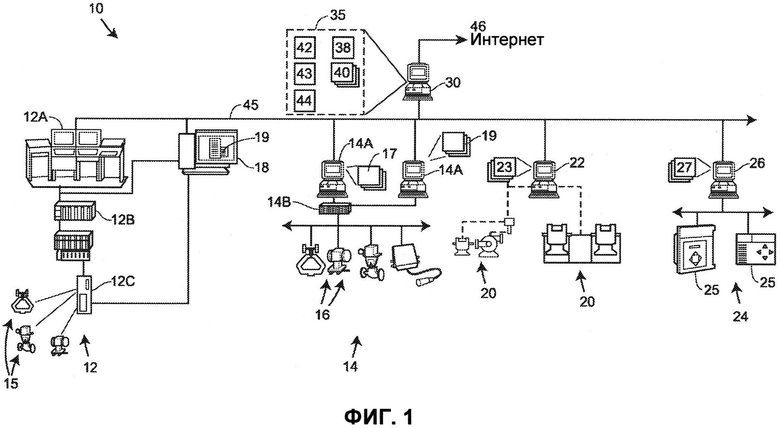
1. Способ, реализуемый с использованием системы обнаружения и определения местоположения неисправности (FDI), для указания потери сжимающего усилия в соединительном устройстве пары фланцев, согласно которому:
передают из системы обнаружения и определения местоположения неисправности в датчик первый запрос о первой последовательности измерений и второй запрос о второй последовательности измерений, причем по меньшей мере один из первого и второго запросов содержит множество частот или длин волн возбуждения, подлежащих применению к указанному датчику;
принимают в системе обнаружения и определения местоположения неисправности первую последовательность измерений, выполненных в соединительном устройстве,
сохраняют указанную первую последовательность измерений,
принимают в системе обнаружения и определения местоположения неисправности вторую последовательность измерений, выполненных в соединительном устройстве,
сохраняют вторую последовательность измерений,
сравнивают первую последовательность измерений и вторую последовательность измерений и
генерируют указание, если первая последовательность измерений отклонена от второй последовательности измерений.
2. Способ по п.1, согласно которому первая последовательность измерений и вторая последовательность измерений содержат измерения импеданса, выполненные с использованием ряда примененных к датчику электрических сигналов возбуждения на ряде частот, причем указанные измерения импеданса выполнены в ответ на первый запрос о первой последовательности измерений импеданса отражения и второй запрос о второй последовательности измерений импеданса, переданные системой обнаружения и определения местоположения неисправности.
3. Способ по п.2, согласно которому каждая частота из указанного ряда частот находится в диапазоне от 30 кГц до 400 кГц.
4. Способ по п.2, согласно которому подают ряд электрических сигналов на соединительное устройство с использованием пьезоэлектрического датчика (PZT).
5. Способ по п.4, содержащий этап, на котором соединяют пьезоэлектрический датчик с соединительным устройством.
6. Способ по п.4, содержащий этап, на котором соединяют пьезоэлектрический датчик с соединительным устройством посредством адгезива.
7. Способ по п.1, согласно которому первая последовательность измерений и вторая последовательность измерений содержат измерения коэффициента отражения, выполненные при ряде примененных к датчику длин волн возбуждения.
8. Способ по п.7, согласно которому каждая длина волны из указанного ряда длин волн находится в диапазоне от 0,1 нм до 106 нм.
9. Способ по п.7, согласно которому измерения коэффициента отражения выполнены с использованием датчика на основе волоконной решетки Брэгга.
10. Способ по п.9, согласно которому датчик на основе волоконной решетки Брэгга размещен в уплотнении, расположенном между соединительными устройствами.
11. Способ по п.1, согласно которому соединительное устройство представляет собой одно из фланцевого соединения, соединения типа ʺкорпус-крышкаʺ клапана или соединения корпуса исполнительно-приводного механизма.
12. Способ по п.9, согласно которому датчик на основе волоконной решетки Брэгга расположен в одном из фланцевого соединения, соединения типа ʺкорпус-крышкаʺ клапана или соединения корпуса исполнительно-приводного механизма.
13. Способ по п.1, дополнительно содержащий этап, на котором генерируют первую кривую на основании первой последовательности измерений и вторую кривую на основании второй последовательности измерений.
14. Способ по п.13, дополнительно содержащий этап, на котором определяют первый ряд коэффициентов для первой кривой и второй ряд коэффициентов для второй кривой.
15. Способ по п.14, дополнительно содержащий этап, на котором сравнивают первый ряд коэффициентов и второй ряд коэффициентов для определения отклонений первой последовательности измерений от второй последовательности измерений.
16. Устройство для определения потери сжимающего усилия в соединительном устройстве между периферийным устройством и компонентом технологической установки, содержащее:
систему обнаружения и определения неисправности (FDI);
датчик, расположенный в соединительном устройстве;
блок возбуждения, соединенный с датчиком и выполненный с возможностью применения к указанному датчику последователи частот или длин волн возбуждения; и
измерительный модуль, соединенный с датчиком.
17. Устройство по п.16, в котором блок возбуждения выполнен с возможностью оптического соединения с датчиком посредством оптического соединения, а измерительный модуль выполнен с возможностью оптического соединения с датчиком посредством оптического соединения.
18. Устройство по п.16, в котором датчик представляет собой датчик на основе волоконной решетки Брэгга (FBG).
19. Устройство по п.18, в котором блок возбуждения выполнен с возможностью освещения датчика на основе волоконной решетки Брэгга посредством оптического соединения светом на выбранной длине волны, причем выбранная длина волны находятся диапазоне от 0,1 нм до 106 нм.
20. Устройство по п.18, в котором датчик на основе волоконной решетки Брэгга выполнен с возможностью размещения в одном из фланцевого соединения, соединения типа ʺкорпус-крышкаʺ клапана или соединения корпуса исполнительно-приводного механизма.
21. Устройство по п.18, в котором датчик на основе волоконной решетки Брэгга размещен в уплотнении, расположенном между соединительным устройством.
22. Устройство по п.16, в котором блок возбуждения электрически соединен с датчиком посредством электрического соединения и измерительный модуль электрически соединен с датчиком посредством электрического соединения.
23. Устройство по п.16, в котором датчиком является пьезоэлектрический датчик (PZT).
24. Устройство по п.23, в котором блок возбуждения выполнен с возможностью электрического возбуждения пьезоэлектрического датчика путем подачи посредством электрического соединения электрического сигнала с выбранной частотой, причем диапазоны выбранной частоты составляют от 30 кГц до 400 кГц.
25. Устройство по п.23, в котором пьезоэлектрический датчик выполнен с возможностью соединения с соединительным устройством с использованием адгезива.
26. Устройство по п.16, в котором блок возбуждения выполнен с возможностью приема от системы обнаружения и определения местоположения неисправности указания о выбранной длине волны.
27. Устройство по п.16, в котором блок возбуждения выполнен с возможностью приема от системы обнаружения и определения местоположения неисправности указания о выбранной частоте.
28. Устройство по п.18, в котором измерительный модуль выполнен с возможностью передачи данных, полученных от датчика на основе волоконной решетки Брэгга, в систему обнаружения и определения местоположения неисправности.
29. Устройство по п.23, в котором измерительный модуль выполнен с возможностью передачи данных, полученных от пьезоэлектрического датчика, в систему обнаружения и определения местоположения неисправности.
30. Способ указания о потере сжимающего усилия в соединительном устройстве пары фланцев, согласно которому:
обеспечивают принятие первой последовательности измерений в системе обнаружения и определения местоположения неисправности, причем каждое измерение из первой последовательности измерений выполнено в соединительном устройстве, при этом первая последовательность измерений получена в ответ на первые частоты или длины волн возбуждения, примененные к датчику,
обеспечивают сохранение первой последовательности измерений в системе обнаружения и определения местоположения неисправности в ответ на прием первой последовательности измерений,
обеспечивают принятие второй последовательности измерений в системе обнаружения и определения местоположения неисправности, причем каждое измерение из второй последовательности измерений выполнено в соединительном устройстве, при этом вторая последовательность измерений получена в ответ на вторые частоты или длины волн возбуждения, примененные к датчику, причем вторые частоты или длины волн возбуждения отличны от первых частот или длин волн возбуждения,
обеспечивают сохранение второй последовательности измерений в системе обнаружения и определения местоположения неисправности в ответ на прием второй последовательности измерений,
сравнивают первую последовательность измерений и вторую последовательность измерений,
определяют отклонение первой последовательности измерений от второй последовательности измерений и
обеспечивают генерирование указания системой обнаружения и определения местоположения неисправности в случае определения отклонения первой последовательности измерений от второй последовательности измерений.
31. Способ по п.30, согласно которому первую последовательность измерений принимают в ответ на обеспечение передачи системой обнаружения и определения местоположения первого запроса на передачу первой последовательности измерений. а вторую последовательность измерений принимают в ответ на обеспечение передачи системой обнаружения и определения местоположения неисправностей второго запроса системы на вторую последовательность измерений.
32. Способ по п.31, согласно которому первый запрос и второй запрос каждый содержит указание о выбранной длине волны.
33. Способ по п.30, согласно которому каждая последовательность из первой последовательности измерений и второй последовательности измерений соответствует измерениям коэффициента отражения, выполняемым в соединительном устройстве посредством освещения датчика на основе волоконной решетки Брэгга светом на выбранной длине волны, причем датчик на основе волоконной решетки Брэгга расположен между парой фланцев в соединительном устройстве.
34. Способ по п.31, согласно которому каждый из первого запроса и второго запроса содержит указание о выбранной частоте.
35. Способ по п.30, согласно которому каждая из первой последовательности измерений и второй последовательности результатов соответствует измерениям импеданса, выполняемым в соединительном устройстве путем возбуждения пьезоэлектрического датчика электрическим сигналом на выбранной частоте, причем указанный пьезоэлектрический датчик соединен с соединительным устройством.
| US 2007088528 A1 19.04.2007 | |||
| DE 19831372 A1 27.01.2000 | |||
| US 2010329602 A1 30.12.2010. |

