ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к управлению фокусировкой для устройств формирования изображения и т.п.
УРОВЕНЬ ТЕХНИКИ
Примеры способов управления фокусировкой устройства формирования изображения включают в себя способ обнаружения разности фаз и способ обнаружения различий (см. патентную публикацию Японии №09-054242 и патентную публикацию Японии №2001-004914). Также известен способ обнаружения разности фаз на плоскости изображения, который также используется в процессе съемки в режиме визирования по экрану (LV), что позволяет пользователю снимать изображения наряду с просмотром изображений на заднем мониторе и т.п. (см. патентную публикацию Японии №2001-083407).
Однако способ обнаружения разности фаз на плоскости изображения, который также поддерживает режим визирования по экрану, все еще существует необходимость в более устойчивом управлении фокусировкой, чем когда-либо, чтобы сделать метод подходящим для съемки в режиме визирования по экрану и для съемки видеоклипов. В частности, с увеличением количества пикселов, неумышленные смещения фокуса приведут к получению движущихся изображений, которые являются неестественными для наблюдателей.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В одном аспекте устройство управления фокусировкой, предназначенное для обнаружения разности фаз между двумя изображениями, чтобы получить информацию о расфокусировке, включает в себя блок получения, который получает первую информацию о расфокусировке на основании выходных данных датчика изображения, соответствующих первому участку в области снятого изображения, а также получает вторую информацию о расфокусировке на основании выходных данных датчика изображения, соответствующих второму участку в области, и блок управления, который получает информацию о расфокусировке, соответствующую области, с использованием первой информации о расфокусировке и второй информации о расфокусировке, а также осуществляет управление фокусировкой на основании полученной информации о расфокусировке. Первый участок имеет длину в направлении обнаружения разности фаз, которая превышает длину второго участка.
Дополнительные отличительные признаки настоящего изобретения станут очевидными из нижеследующего описания вариантов осуществления, представленного со ссылкой на прилагаемые чертежи. Каждый из нижеописанных вариантов осуществления настоящего изобретения может быть реализован по отдельности или в виде комбинации множества вариантов осуществления или их отличительных признаков, в случае необходимости, или когда комбинация элементов или отличительных признаков отдельных вариантов осуществления в одном варианте осуществления является полезной.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
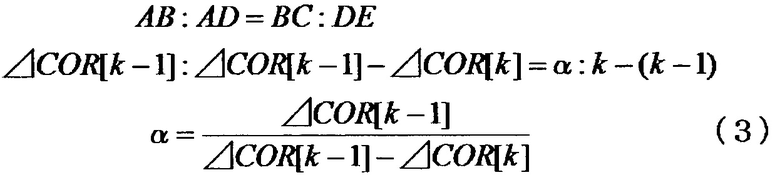
Фиг. 1 изображает блок-схему, демонстрирующую конфигурацию устройства формирования изображения, служащего в качестве устройства управления фокусировкой, и конфигурацию объектива.
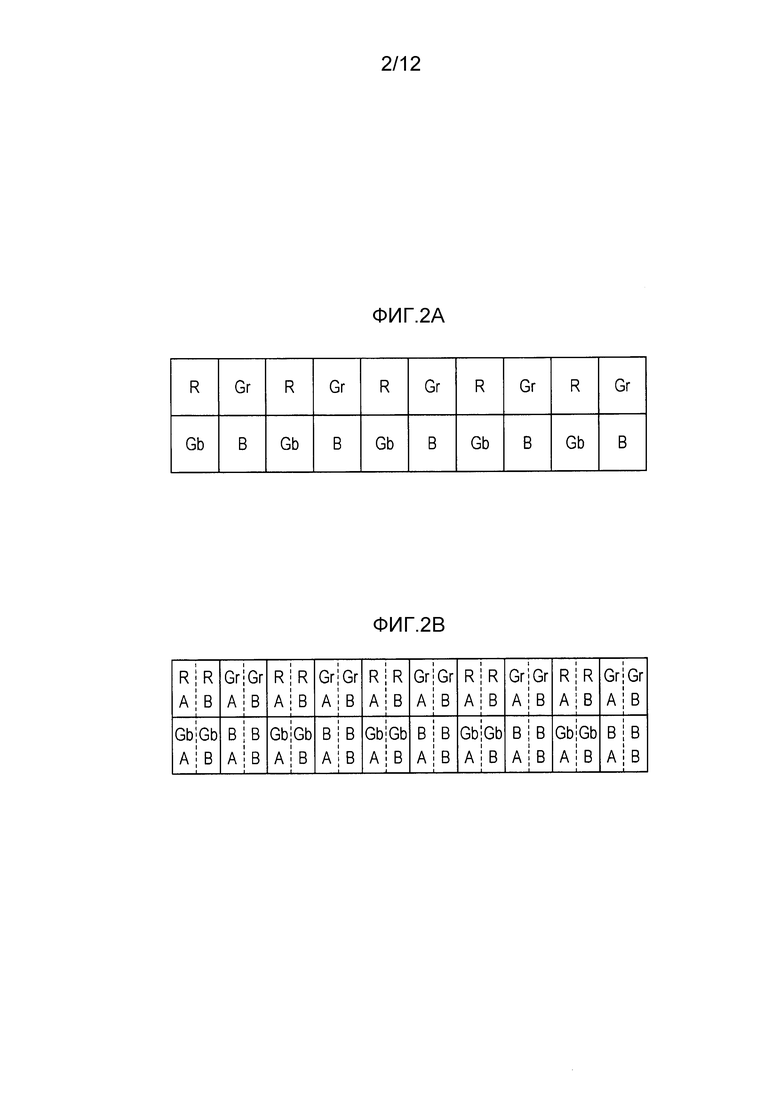
Фиг. 2А и 2B изображают графические представления, демонстрирующие участок, который является частью датчика изображения, причем Фиг. 2A изображает конфигурацию пиксела с иллюстративным шаблоном Байера, а Фиг. 2B изображает конфигурацию пиксела, используемую для способа автофокусировки (AF) при наличии разности фаз на плоскости изображения.
Фиг. 3 изображает блок-схему процесса управления автофокусировкой (AF).
Фиг. 4 изображает блок-схему процесс привода линзы.
Фиг. 5 блок-схему процесса установки области обнаружения, в которой обнаружена величина расфокусировки.
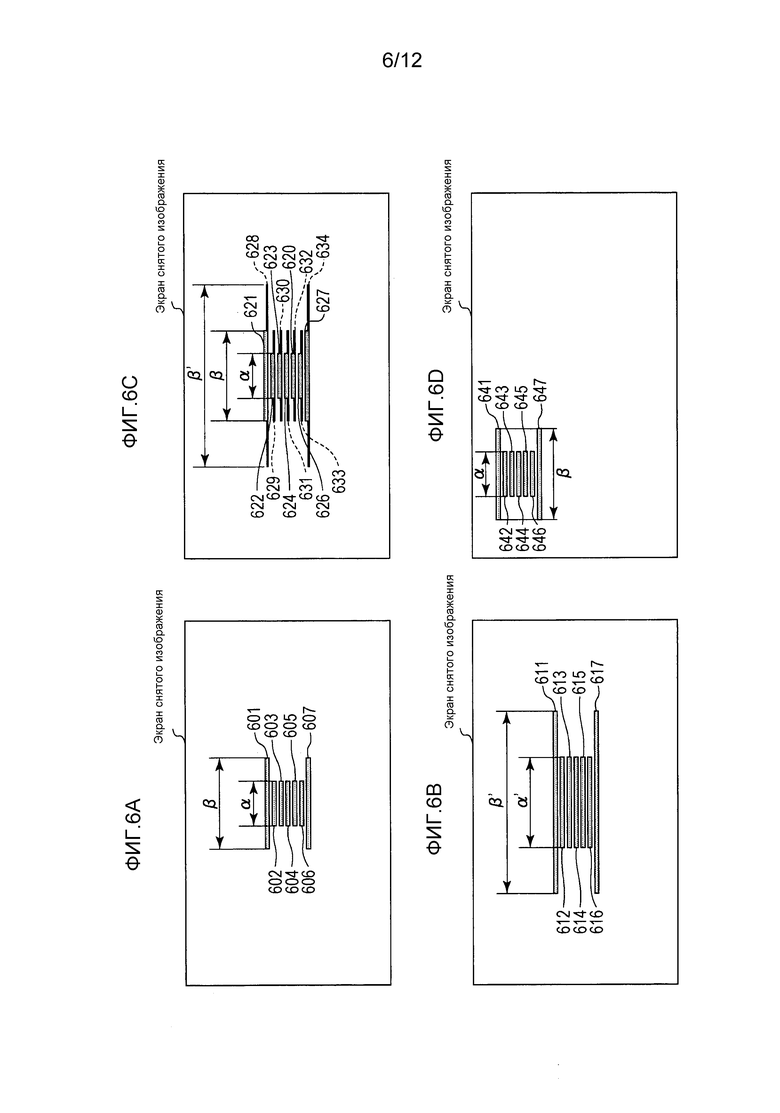
Фиг. 6А-6D изображают графические представления, демонстрирующие иллюстративные структуры областей обнаружения, в которой обнаружена величина расфокусировки.
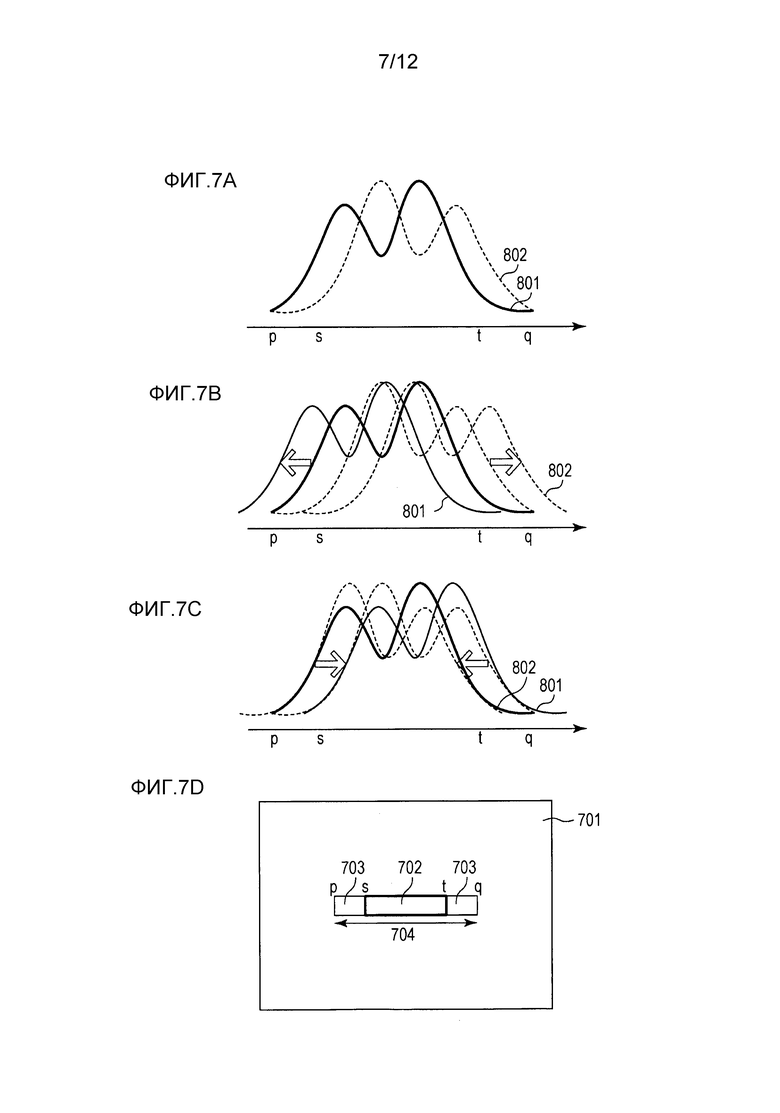
Фиг. 7А-7D изображают графические представления, демонстрирующие сигналы изображения, полученные из области обнаружения, в которой обнаружена величина расфокусировки.
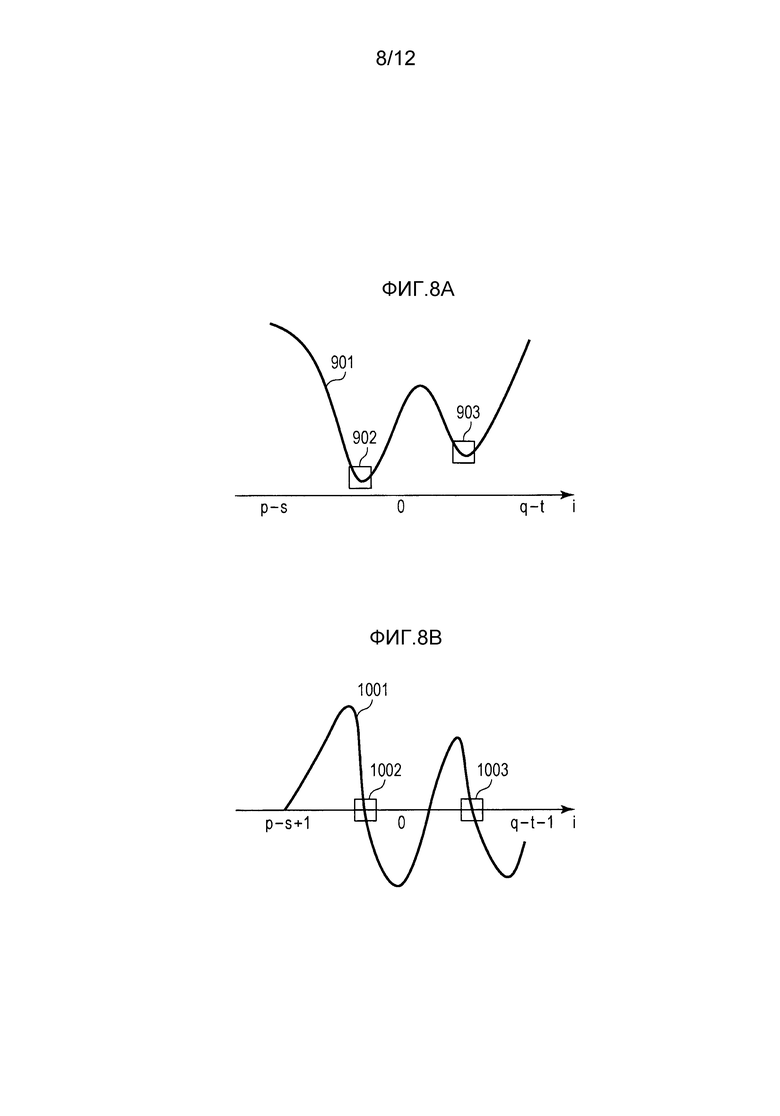
Фиг. 8А и 8B изображают графические представления, демонстрирующие форму корреляционного сигнала, форму сигнала с величиной изменения в коэффициенте корреляции и величину размытия расфокусированного изображения.
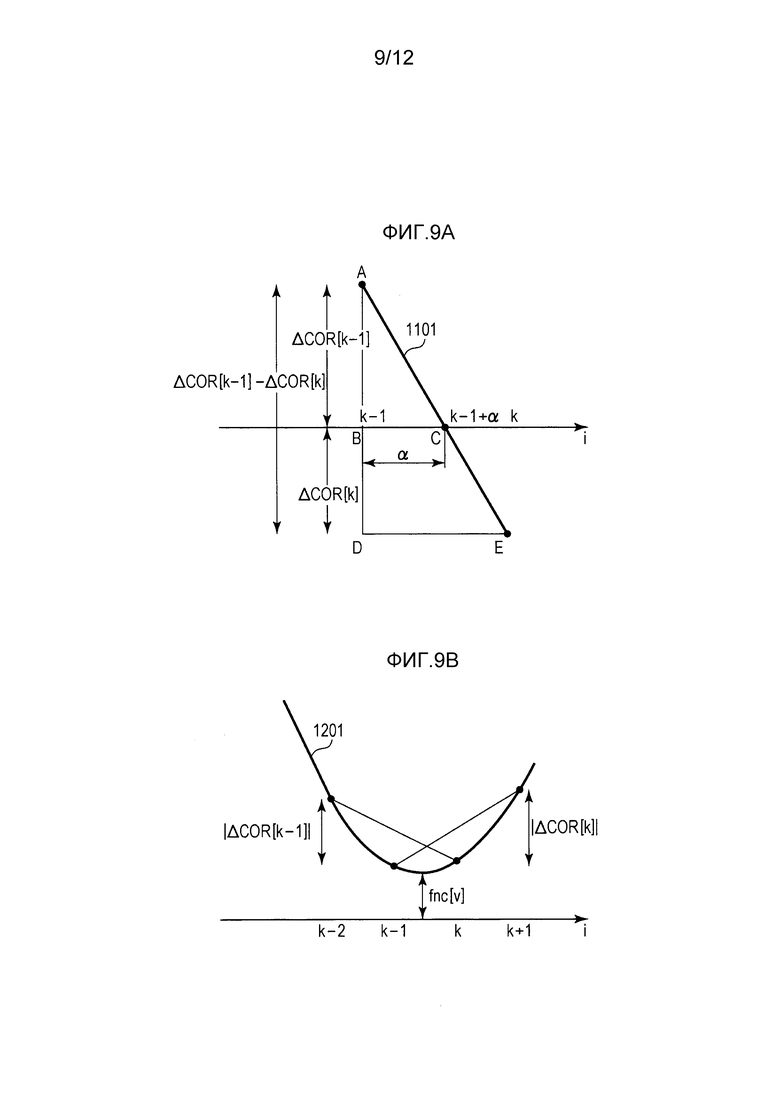
Фиг. 9А и 9B изображают графические представления, демонстрирующие способ вычисления подобия изображения.
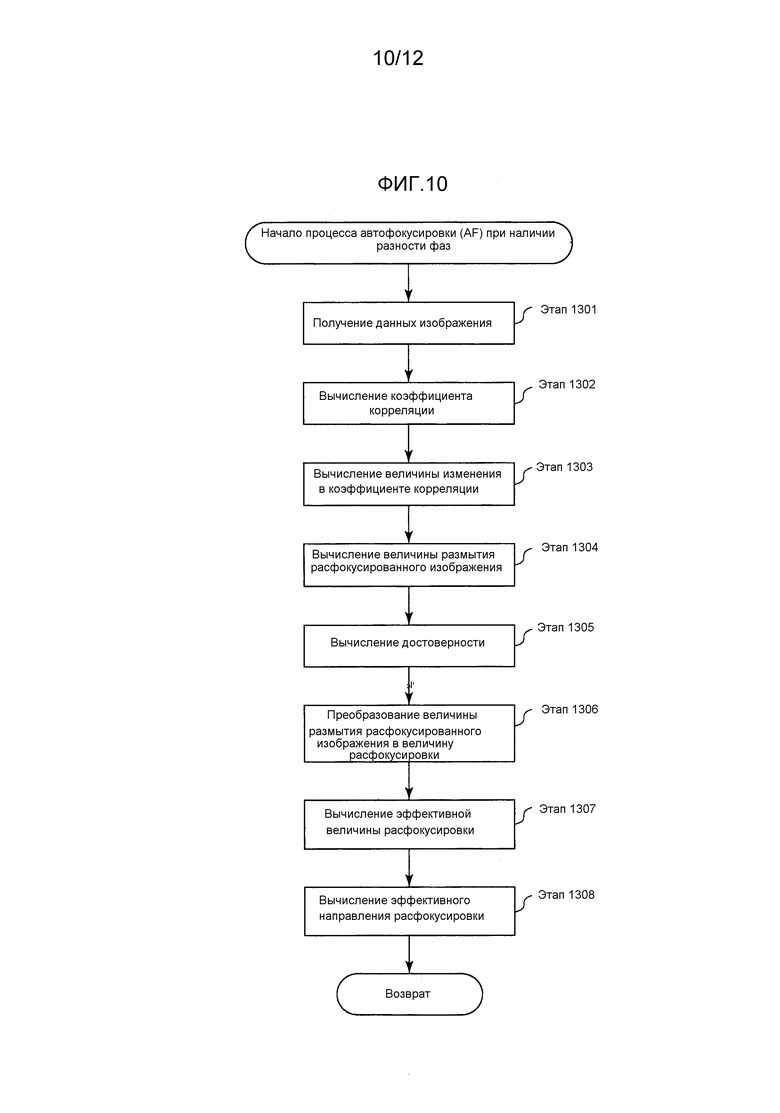
Фиг. 10 блок-схема процесса автофокусировки (AF) при наличии разности фаз.
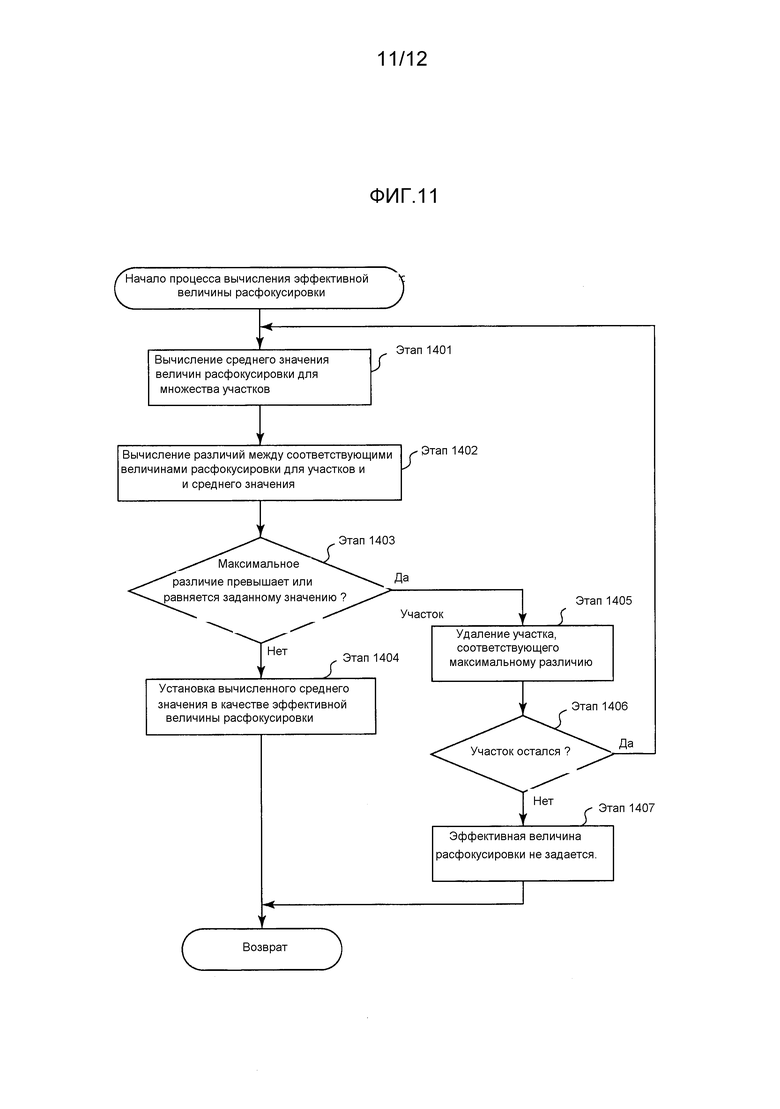
Фиг. 11 блок-схема вычисления величины расфокусировки.
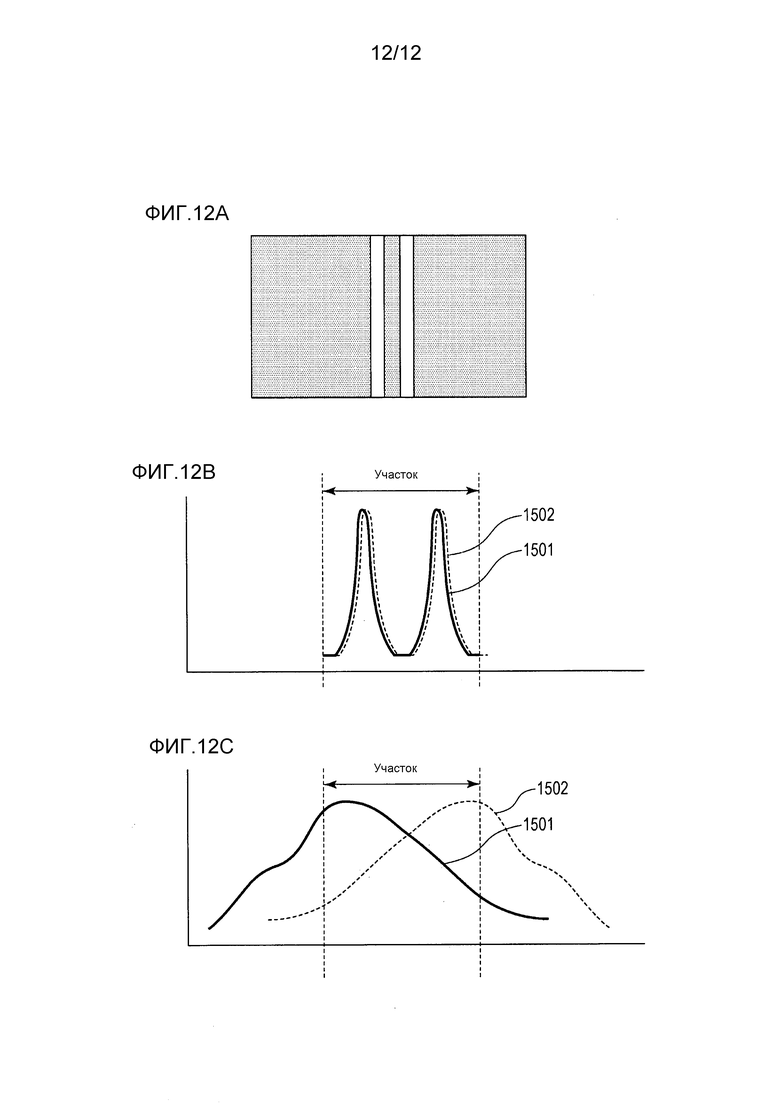
Фиг. 12А-12C изображают графические представления, демонстрирующие иллюстративные сигналы изображения в способе обнаружения разности фаз на плоскости изображения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Далее в настоящем документе, со ссылкой на чертежи, будет описан вариант осуществления настоящего изобретения. Нижеследующий вариант осуществления является примером или вариантом реализации настоящего изобретения, при этом он может быть модифицирован или изменен в соответствии с конфигурацией устройства или прибора, к которому применяется настоящее изобретение, и различными условиями. Объем настоящего изобретения не ограничивается нижеследующим вариантом осуществления.
КОНФИГУРАЦИЯ УСТРОЙСТВА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ
В качестве примера устройства управления фокусировкой, в соответствии с вариантом осуществления настоящего изобретения, будет представлено описание устройства формирования изображения. В данном варианте осуществления будет представлено описание устройства формирования изображения, выполненного таким образом, что объектив съемно крепится к устройству формирования изображения. В качестве альтернативы может быть использовано устройство формирования изображения любого другого типа, такое как цифровая камера с объективом.
Фиг. 1 изображает блок-схему, демонстрирующую конфигурацию основной части объектива и устройства формирования изображения, в соответствии с данным вариантом осуществления.
Как продемонстрировано на Фиг. 1, данный вариант осуществления реализуется посредством объектива 10 и устройства 20 формирования изображения. Блок 106 управления объективом, который управляет всей работой объектива 10, и блок 207 управления камерой, который управляет всей работой устройства 20 формирования изображения, обмениваются информацией друг с другом.
Сначала будет представлено описание конфигурации объектива 10. Объектив 10 включает в себя блок 101 неподвижных линз, имеющий группу неподвижных линз, диафрагму 102, фокусирующую линзу 103, блок 104 привода диафрагмы, блок 105 привода фокусирующей линзы, блок 106 управления объективом и операционный блок 107 объектива. Блок 101 неподвижных линз, диафрагма 102 и фокусирующая линза 103 формируют оптическую систему формирования изображения.
Диафрагма 102 приводится в действие посредством блока 104 привода диафрагмы для управления количеством света, попадающего на нижеописанный элемент 201 формирования изображения. Фокусирующая линза 103 приводится в действие посредством блока 105 привода фокусирующей линзы для регулирования фокусировки на изображении, сформированном на нижеописанном элементе 201 формирования изображения. Управление блоком 104 привода диафрагмы и блоком 105 привода фокусирующей линзы осуществляется посредством блока 106 управления объективом для определения раскрытия отверстия диафрагмы 102 и положения фокусирующей линзы 103. В ответ на операции пользователя с операционным блоком 107 объектива, блок 106 управления объективом осуществляет управление, соответствующее операциям пользователя. Блок 106 управления объективом управляет блоком 104 привода диафрагмы и блоком 105 привода фокусирующей линзы, в соответствии с командами управления/информацией управления, принятыми от нижеописанного блока 207 управления камерой, а также передает информацию управления объективом на блок 207 управления камерой.
Далее будет представлено описание конфигурации устройства 20 формирования изображения. Устройство 20 формирования изображения выполнено с возможностью получения сигнала съемки изображения из светового потока, передаваемого через оптическую систему формирования изображения объектива 10. Устройство 20 формирования изображения включает в себя элемент 201 формирования изображения, схему 202 двойной коррелированной выборки/автоматической регулировки усиления (CDS/AGC), блок 203 обработки сигналов камеры, блок 204 обработки сигналов автофокусировки (AF), блок 205 отображения, блок 206 записи, блок 207 управления камерой, операционный блок 208 камеры и генератор 209 тактовых импульсов. Элемент 201 формирования изображения является элементом, служащим в качестве датчика изображения, и состоит из датчика на приборах с зарядовой связью (CCD), датчика на структуре комплементарных металлооксидных полупроводников (CMOS) и т.п. Световой поток, передаваемый через оптическую систему формирования изображения объектива 10, фокусируется на светоприемной поверхности элемента 201 формирования изображения, и преобразуется в сигнальный заряд, соответствующий количеству проходящего света, посредством фотодиодов. Сигнальные заряды, накопленные в соответствующих фотодиодах, последовательно считываются с элемента 201 формирования изображения в виде сигналов напряжения, соответствующих сигнальным зарядам, в ответ на управляющие импульсы, обеспеченные генератором 209 тактовых импульсов, в соответствии с командами блока 207 управления камерой.
Видеосигнал и сигнал для автофокусировки (AF), которые считываются с элемента 201 формирования изображения, вводятся на схему 202 CDS/AGC для осуществления выборки и регулирования усиления. Схема 202 CDS/AGC выводит видеосигнал на блок 203 обработки сигналов камеры, а также выводит сигнал для автофокусировки (AF) (сигнал для автофокусировки (AF) при наличии разности фаз на плоскости изображения) на блок 204 обработки сигналов автофокусировки (AF).
Блок 203 обработки сигналов камеры выполняет различные операции по обработке изображения применительно к сигналу, выводимому со схемы 202 CDS/AGC, для генерирования видеосигнала.
Блок 205 отображения, примеры которого включают в себя жидкокристаллический дисплей (LCD), отображает видеосигнал, выводимый с блока 203 обработки сигналов камеры, в виде снятого изображения.
Блок 206 записи записывает видеосигнал с блока 203 обработки сигналов камеры на носитель записи, такой как магнитная лента, оптический диск или полупроводниковая память.
Блок 204 обработки сигналов автофокусировки (AF) выполняет расчет коэффициента корреляции на основании двух сигналов изображения для автофокусировки (AF), которые выводятся со схемы 202 CDS/AGC, а также вычисляет величину расфокусировки и информацию о достоверности (такую как подобие изображения, крутизна двух изображений, информация о различиях, информация о насыщенности и информация о дефектах). Вычисленная величина расфокусировки и информация о достоверности выводятся на блок 207 управления камерой. Блок 207 управления камерой уведомляет блок 204 обработки сигналов автофокусировки (AF) о любом изменении параметров настройки для вычисления величины расфокусировки и информации о достоверности на основании полученной величины расфокусировки и информации о достоверности. Подробности расчета коэффициента корреляции будут описаны ниже со ссылкой на Фиг. 7А-7D, 8А, 8B, 9А и 9B.
Блок 207 управления камерой обменивается информацией с другими внутренними компонентами устройства 20 формирования изображения для осуществления управления. Блок 207 управления камерой выполняет внутренний процесс обработки устройства 20 формирования изображения, а также реализует различные функции камеры на основании операций пользователя, в соответствии с входными данными от операционного блока 208 камеры. Примеры функций камеры включают в себя включение и выключение питания, изменение параметров настройки, инициирование записи, инициирование управления автофокусировкой (AF) и проверку записанных видеоклипов. Кроме того, как было описано выше, блок 207 управления камерой обменивается информацией с блоком 106 управления объективом в объективе 10 для отправки команд управления/информации управления для объектива 10 и получения информации о внутренних компонентах объектива 10.
ДАТЧИК ИЗОБРАЖЕНИЯ
Фиг. 2А и 2B изображают часть светоприемной поверхности элемента 201 формирования изображения, служащего в качестве датчика изображения. Для выполнения автофокусировки (AF) при наличии разности фаз на плоскости изображения элемент 201 формирования изображения имеет матрицу блоков пикселов, каждый из которых имеет по два фотодиода, служащих в качестве фотоэлектрических преобразователей для каждой микролинзы. Фотодиоды являются светоприемными блоками. Это позволяет каждому блоку пикселов принимать разделенные части светового потока, проходящего через выходной зрачок объектива 10.
Фиг. 2A изображает схематическое графическое представление части поверхности датчика изображения, имеющего иллюстративный шаблон Байера с красным (R), синим (В) и зеленым (Gr) цветами, обозначения которых представлены исключительно в иллюстративных целях. Фиг. 2B изображает иллюстративный блок пикселов, имеющий два фотодиода, служащие в качестве фотоэлектрических преобразователей для каждой микролинзы, который располагается в соответствии с шаблоном цветного светофильтра, продемонстрированным на Фиг. 2A.
Датчик изображения, имеющий вышеописанную конфигурацию, выполняется с возможностью вывода двух сигналов для автофокусировки (AF) при наличии разности фаз (далее в настоящем документе эти сигналы будут называться сигналом изображения А и сигналом изображения В) с каждого блока пикселов. Датчик изображения также выполняется с возможностью вывода сигналов (сигналов изображения А + сигналов изображения В) для записи снятого изображения, каждый из которых получают посредством суммирования сигналов двух фотодиодов. В случае суммирования сигналов выводятся сигналы, эквивалентные выходным данным датчика изображения, имеющего иллюстративный шаблон Байера, схематично описанный со ссылкой на Фиг. 2A.
При использовании выходных сигналов элемента 201 формирования изображения, служащего в качестве вышеописанного датчика изображения, нижеописанный блок 204 обработки сигналов автофокусировки (AF) выполняет расчет коэффициента корреляции двух сигналов изображения, а также вычисляет информацию, такую как величина расфокусировки и различные типы достоверности.
В данном варианте осуществления с элемента 201 формирования изображения выводится сигнал для съемки изображения и два сигнала для автофокусировки (AF) при наличии разности фаз, то есть в общей сложности выводится три сигнала. Однако настоящее изобретение не ограничивается этим способом. Например, с элемента 201 формирования изображения может быть выведен сигнал для съемки изображения и один из двух сигналов изображения для автофокусировки (AF) при наличии разности фаз, то есть в общей сложности выводится два сигнала. В этом случае, после вывода сигналов, с использованием двух сигналов, выведенных с элемента 201 формирования изображения, вычисляется другой из двух сигналов изображения для автофокусировки (AF) при наличии разности фаз.
На Фиг. 2А и 2B, в качестве примера, блоки пикселов, каждый из которых имеет по два фотодиода, служащих в качестве фотоэлектрических преобразователей для каждой микролинзы, располагаются в матрице. Вместо этой конфигурации, в матрице могут быть расположены блоки пикселов, каждый из которых имеет по три или более фотодиодов, служащих в качестве фотоэлектрических преобразователей для каждой микролинзы. В альтернативном варианте может быть использовано множество блоков пикселов, каждый из которых имеет светоприемные блоки, имеющие различные положения отверстий для каждой микролинзы. Другими словами, может являться достаточным получить, в результате, два сигнала для автофокусировки (AF) при наличии разности фаз, которые обеспечивают возможности обнаружения разности фаз, такие как сигнал изображения А и сигнал изображения В.
ПРОЦЕСС УПРАВЛЕНИЯ АВТОФОКУСИРОВКОЙ (AF)
Далее будет представлено описание процесса управления автофокусировкой (AF), выполняемого посредством блока 207 управления камерой.
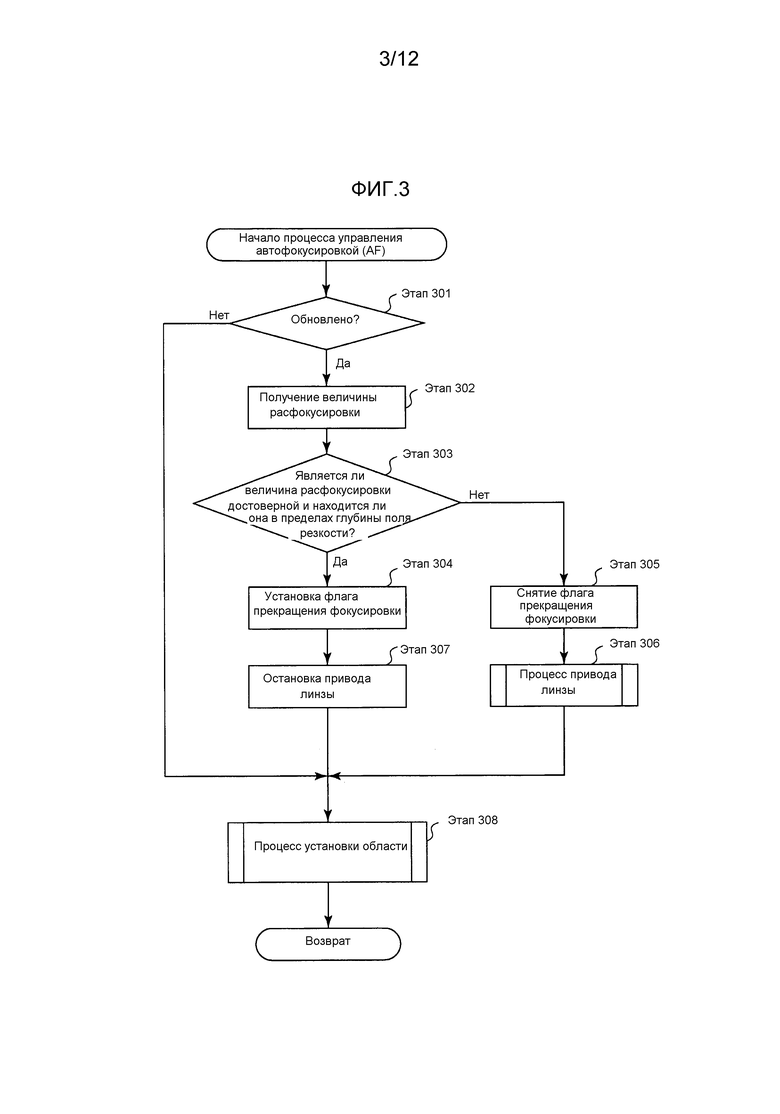
Фиг. 3 изображает графическое представление алгоритма, демонстрирующее процесс управления автофокусировкой (AF), выполняемый посредством блока 207 управления камерой, продемонстрированного на Фиг. 1. Продемонстрированный процесс выполняется в соответствии с компьютерной программой, сохраненной в блоке 207 управления камерой. Данный процесс выполняется, например, в течение операции, в которой сигнал съемки изображения считывается с элемента 201 формирования изображения, (или в течение каждого периода синхронизации кадровой развертки) для генерирования однопрофильного изображения (далее в настоящем документе такое изображение будет называться одним кадром или одним экраном). В качестве альтернативы этот процесс может быть циклически выполнен несколько раз в течение периода синхронизации кадровой развертки (Vrate).
Как продемонстрировано на Фиг. 3, сначала блок 207 управления камерой проверяет, был ли сигнал автофокусировки (AF) обновлен в блоке 204 обработки сигналов автофокусировки (AF) (этап 301). Если сигнал автофокусировки (AF) был обновлен, то блок 207 управления камерой получает результат от блока 204 обработки сигналов автофокусировки (AF) (этап 302).
Затем блок 207 управления камерой определяет, находится ли полученная величина расфокусировки, которая указывает величину размытия расфокусированного изображения, в пределах заданной глубины поля резкости и является ли она достоверной, то есть превышает ли достоверность величины расфокусировки заданное значение (этап 303). Если величина расфокусировки находится в пределах глубины поля резкости и достоверность величины расфокусировки превышает заданное значение, то блок 207 управления камерой устанавливает флаг прекращения фокусировки (этап 304), или, в противном случае, блок 207 управления камерой снимает флаг прекращения фокусировки (этап 305). Когда флаг прекращения фокусировки установлен, управление фокусировкой осуществляется таким образом, чтобы фокусирующая линза 103 перемещалась в положение фокуса, при этом управление фокусировкой подлежит прекращению.
Далее будет обсуждаться достоверность величины расфокусировки. Если точность вычисленной величины расфокусировки является достоверной, то определяется, что достоверность является высокой. Если направление расфокусировки, указывающее направление, в котором будет присутствовать положение фокуса, является достоверным, то определяется, что достоверность является «средней». Достоверность величины расфокусировки является высокой, когда, например, различия между сигналом изображения А и сигналом изображения В являются большими, а сигнал изображения А и сигнал изображения В имеют подобные формы (то есть высокое подобие изображения), или когда изображение основного объекта находится в фокусе. В этом случае выполняется операция привода с использованием величины расфокусировки, которая считается достоверной.
Достоверность величины расфокусировки является «средней», когда подобие изображения, вычисленное посредством блока 204 обработки сигналов автофокусировки (AF), ниже заданного значения, при этом коэффициент корреляции, полученный посредством относительного смещения сигнала изображения А и сигнала изображения В, имеет определенную тенденцию, а направление расфокусировки является достоверным. Этот результат определения зачастую получают в случае, когда, например, изображение основного объекта немного размыто. Помимо всего прочего, если величина расфокусировки и направление расфокусировки не являются достоверными, то определяется, что достоверность является низкой. Например, если различия между сигналом изображения А и сигналом изображения В являются малыми, а подобие изображения между сигналом изображения А и сигналом изображения В также является низким, то определяется, что достоверность является низкой. Этот результат определения зачастую получают в случае, когда изображение объекта сильно размыто, когда трудно вычислить величину расфокусировки.
Если величина расфокусировки находится в пределах заданной глубины поля резкости, а достоверность величины расфокусировки является высокой, то блок 207 управления камерой останавливает привод фокусирующей линзы 103 для управления фокусировкой (этап 307). После чего процесс переходит на этап 308.
Если флаг прекращения фокусировки снимается (этап 305), то блок 207 управления камерой выполняет установку для нижеописанного привода линзы (этап 306) и выполняет процесс установки области (этап 308). После чего процесс завершается.
ПРОЦЕСС ПРИВОДА ЛИНЗЫ
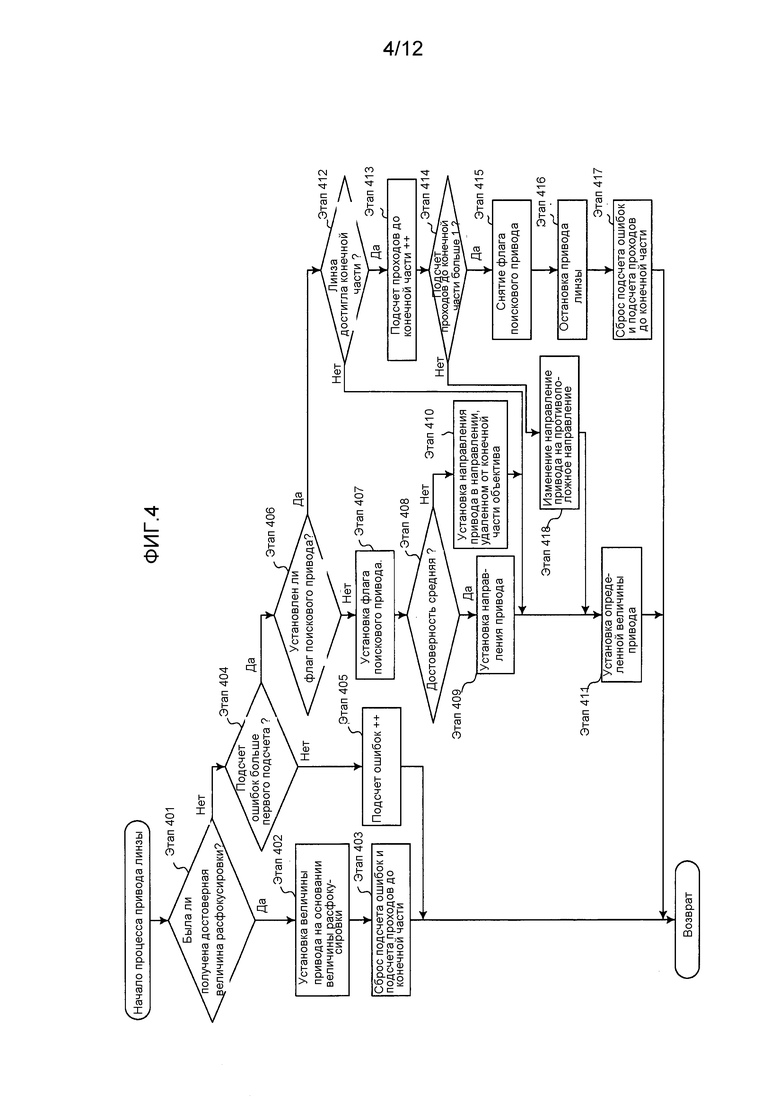
Фиг. 4 изображает графическое представление алгоритма, демонстрирующее подробности процесса управления автофокусировкой (AF), изображенного на Фиг. 3 (этап 306).
Сначала, на этапе 401, блок 207 управления камерой определяет, была ли получена величина расфокусировки, и является ли достоверность величины расфокусировки высокой. Если величина расфокусировки была получена, и достоверность величины расфокусировки является высокой (положительный результат определения, выполняемого на этапе 401), то блок 207 управления камерой определяет величину привода и направление привода на основании величины расфокусировки (этап 402).
Затем блок 207 управления камерой сбрасывает подсчет ошибок и подсчет проходов до конечной части (этап 403), после чего процесс завершается. Если величина расфокусировки получена не была, или достоверность величины расфокусировки не является высокой (отрицательный результат определения, выполняемого на этапе 401), то блок 207 управления камерой определяет, превышает ли подсчет ошибок первый подсчет (этап 404). Первый подсчет может являться заданным значением (не показано), заблаговременно сохраненным в энергонезависимой памяти. Например, первый подсчет может в два или более раз превышать нижеописанный второй подсчет.
Если подсчет ошибок не превышает первый подсчет (отрицательный результат определения, выполняемого на этапе 404), то блок 207 управления камерой увеличивает подсчет ошибок (этап 405), после чего процесс завершается. Если подсчет ошибок превышает первый подсчет (положительный результат определения, выполняемого на этапе 404), то блок 207 управления камерой определяет, установлен ли флаг поискового привода (этап 406).
Если на этапе 406 определяется, что флаг поискового привода снят (отрицательный результат определения, выполняемого на этапе 406), то это означает, что операция поиска еще не была начата или то, что поиск не осуществляется. Следовательно, блок 207 управления камерой устанавливает флаг поискового привода (этап 407) и определяет, является ли достоверность величины расфокусировки «средней» (этап 408).
Если достоверность является «средней», то блок 207 управления камерой задает направление привода с использованием направления расфокусировки (этап 409), а также задает конкретную величину привода (этап 411). В этом случае блок 207 управления камерой осуществляет поисковый привод для привода фокусирующей линзы 103 на заданную величину в полученном направлении расфокусировки, вместо осуществления привода фокусирующей линзы 103 на основании абсолютного значения величины расфокусировки.
Если достоверность не является «средней» (отрицательный результат определения, выполняемого на этапе 408), то блок 207 управления камерой задает направление привода в направлении, удаленном от конечной части объектива (этап 410), а затем задает определенную величину привода (этап 411).
Конкретная величина привода на этапе 411 может являться значением, заблаговременно определенным в энергонезависимой памяти. Например, величина привода может быть задана соответствующей расстоянию, которое в несколько раз превышает глубину фокусировки. Величина привода также может являться переменной, в зависимости от фокусного расстояния. Например, величина привода может увеличиваться по мере увеличения фокусного расстояния. В этом случае направление поискового привода является, например, направлением дальней конечной части объектива относительно текущего положения фокусировки.
Если флаг поискового привода установлен (положительный результат определения, выполняемого на этапе 406), то это означает, что поисковый привод уже был начат. Следовательно, блок 207 управления камерой беспрерывно осуществляет предшествующее управление фокусировкой. Затем блок 207 управления камерой определяет, находится ли фокусирующая линза 103 в конечной части объектива, которая является пределом привода линзы в процессе управления фокусировкой (этап 412). Если фокусирующая линза 103 находится в конечной части объектива (положительный результат определения, выполняемого на этапе 412), то блок 207 управления камерой увеличивает подсчет проходов до конечной части (этап 413).
Если подсчет проходов до конечной части превышает заданное значение (положительный результат определения, выполняемого на этапе 414), то это означает, что достоверная величина расфокусировки получена не была, даже посредством перемещения фокусирующей линзы 103 из положения крупного плана в положение бесконечной удаленности. Следовательно, блок 207 управления камерой определяет отсутствие какого-либо объекта, на котором можно сфокусироваться. Затем блок 207 управления камерой снимает флаг поискового привода (этап 415) и останавливает привод линзы (этап 416). Помимо всего прочего, блок 207 управления камерой сбрасывает подсчет ошибок и подсчет проходов до конечной части (этап 417), после чего процесс завершается.
Если подсчет проходов до конечной части не превышает заданное значение (отрицательный результат определения, выполняемого на этапе 414), то блок 207 управления камерой меняет направление привода линзы для управления фокусировкой на направление привода, противоположное текущему направлению привода (этап 418), а затем задает определенную величину привода (этап 411).
ПРОЦЕСС УСТАНОВКИ ОБЛАСТИ
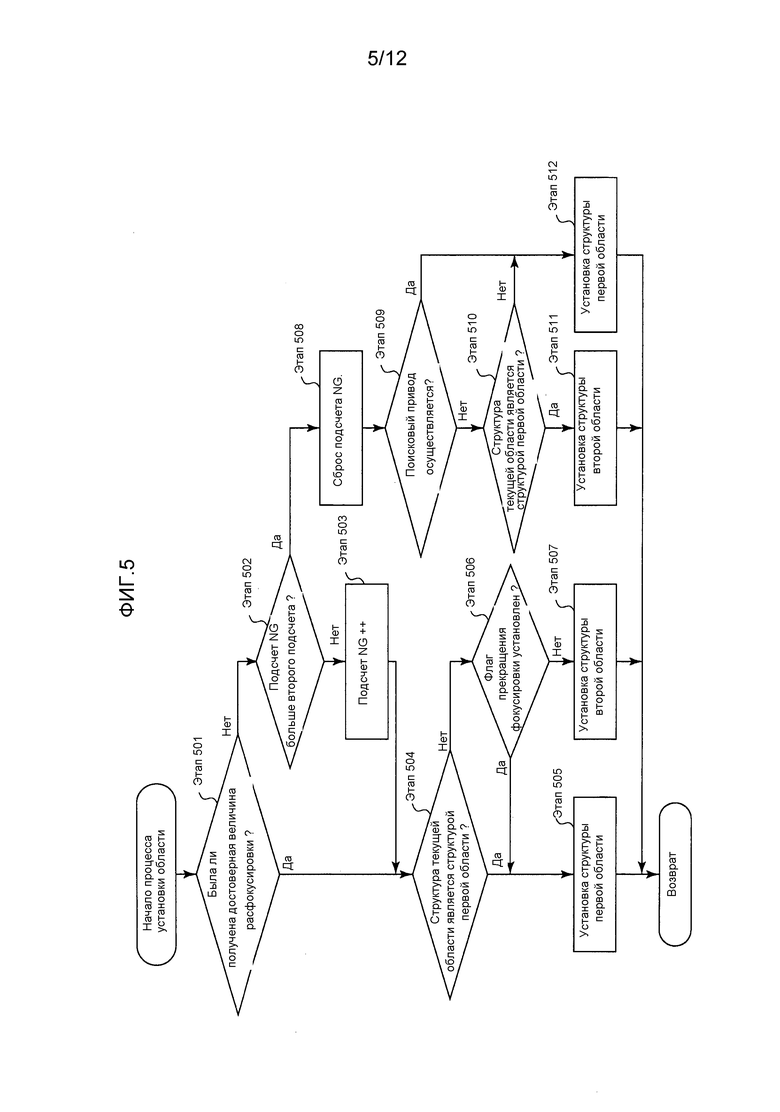
Фиг. 5 изображает графическое представление алгоритма, демонстрирующее детали процесса установки области, изображенного на Фиг. 3 (этап 308).
Сначала блок 207 управления камерой определяет, была ли получена величина расфокусировки, а также является ли достоверность величины расфокусировки высокой (этап 501). Если величина расфокусировки была получена, и достоверность величины расфокусировки является высокой (положительный результат определения, выполняемого на этапе 501), то блок 207 управления камерой определяет, является ли структура области, заданная в настоящее время в снятом изображении, структурой первой области (этап 504). Если структура текущей области является структурой первой области (положительный результат определения, выполняемого на этапе 504), то блок 207 управления камерой поддерживает установку первой области. Если структура текущей области не является структурой первой области (отрицательный результат определения, выполняемого на этапе 504), то на этапе 506 блок 207 управления камерой определяет, был ли установлен флаг прекращения фокусировки. Если флаг прекращения фокусировки установлен (положительный результат определения, выполняемого на этапе 506), то блок 207 управления камерой задает структуру первой области (этап 505). Соответственно, структура сравнительно узкой области задается после достижения фокусировки. Если флаг прекращения фокусировки снят (отрицательный результат определения, выполняемого на этапе 506), то блок 207 управления камерой задает структуру второй области, которая больше структуры первой области (этап 507). Соответственно, параметры настройки могут быть изменены.
В данном случае структура первой области задается, когда устанавливается флаг прекращения фокусировки (этап 506), в связи с тем, что изображение объекта, которое подлежит съемке в структуре второй области, может отличаться от изображения объекта, которое подлежит съемке в первой области. Для предотвращения возникновения такой ситуации, когда привод линзы для управления фокусировкой останавливается, в связи с достижением фокусировки в структуре второй области вследствие установки флага прекращения фокусировки, структура второй области изменяется на структуру сравнительно малой первой области. Переход к структуре первой области используется при съемке видеоклипа, в процессе которой основной объект зачастую появляется в центре экрана. Установка структуры сравнительно малой первой области может повысить вероятность того, что изображение намеченного объекта, в конечном счете, будет сфокусированным.
В случае установки структуры сравнительно малой первой области, величина расфокусировки для объекта может не обнаружиться. Следовательно, в случае получения информации, которая сильно отличается от предшествующей информации на предмет величины расфокусировки для структуры сравнительно большой второй области, когда структура второй области изменяется на структуру сравнительно малой первой области, структура второй области может быть задана заново.
Если величина расфокусировки получена не была, или достоверность величины расфокусировки не является высокой (отрицательный результат определения, выполняемого на этапе 501), то блок 207 управления камерой определяет, превышает ли подсчет NG второй подсчет (этап 502). Если подсчет NG не превышает второй подсчет (отрицательный результат определения, выполняемого на этапе 502), то блок 207 управления камерой увеличивает подсчет NG (этап 503). Затем блок 207 управления камерой определяет, является ли структура текущей области структурой первой области (этап 504).
Если подсчет NG превышает второй подсчет (положительный результат определения, выполняемого на этапе 502), то блок 207 управления камерой сбрасывает подсчет NG (этап 508) и определяет, осуществляется ли поисковый привод (этап 509). Если поисковый привод осуществляется (положительный результат определения, выполняемого на этапе 509), то блок 207 управления камерой задает структуру первой области (этап 512). Если поисковый привод не осуществляется (отрицательный результат определения, выполняемого на этапе 509), то блок 207 управления камерой определяет, является ли структура текущей области структурой первой области (этап 510). Если структура текущей области является структурой первой области (положительный результат определения, выполняемого на этапе 510), то блок 207 управления камерой задает структуру сравнительно большой второй области (этап 511). Если структура текущей области не является структурой первой области (отрицательный результат определения, выполняемого на этапе 510), то блок 207 управления камерой задает структуру сравнительно малой первой области (этап 512).
Причиной определения того, осуществляется ли поисковый привод (этап 509), является следующее. Операция переключения между структурой первой области и структурой второй области выполняется перед осуществлением поисковый привод, благодаря чему обеспечивается гарантия того, что поисковый привод осуществляется в отношении NG для обеих областей, перед осуществлением поискового привода.
Кроме того, если в процессе поискового привода была получена достоверная величина расфокусировки, то блок 207 управления камерой останавливает поисковый привод и осуществляет управление фокусировкой в соответствии с полученным результатом. Соответственно, в процессе поискового привода изображение объекта, которое является не соответствующим, может быть снято в относительно большой второй области, и, исходя из вышесказанного, задается структура первой области.
СТРУКТУРА ОБЛАСТИ (1)
Далее, со ссылкой на Фиг. 6А-6D, будут более подробно описаны структуры области. Фиг. 6A изображает графическое представление, демонстрирующее структуру первой области. Область имеет семь участков, а именно, участки 601-607. Участки 601 и 607 имеют вторую длину, которая является β% горизонтальной длины экрана. Пять участков, имеющих первую длину, которая является α% горизонтальной длины экрана и короче второй длины, а именно, участки 602-606, располагаются в центре экрана снятого изображения. Таким способом множество участков, имеющих различные длины, располагаются в области, при этом количество коротких участков превышает количество длинных участков.
Величины расфокусировки, полученные из семи участков, используются в сочетании для получения одной эффективной величины расфокусировки и одного эффективного направления расфокусировки, которые будут описаны ниже. Управление фокусировкой осуществляется для привода линзы для фокусировки с использованием эффективной величины расфокусировки и эффективного направления расфокусировки. В дальнейшем, понятие, которое означает одну величину расфокусировки, соответствующую области, также будет называться эффективной величиной расфокусировки. Кроме того, понятие, которое означает одно направление расфокусировки, соответствующее области, также будет называться эффективным направлением расфокусировки.
Расположение участков, имеющих сравнительно малую первую длину, и участков, имеющих сравнительно большую вторую длину, гарантирует качество изображения при съемке видеоклипа, а также при съемке в режиме визирования по экрану. Установка только участков, имеющих сравнительно малую первую длину, может быть недостаточным для съемки изображения основного объекта или может привести к тому, что движущийся основной объект не появится в области. Соответственно, фокусировка может быть размыта вследствие выходных данных датчика изображения, соответствующих участкам, имеющим сравнительно малую первую длину. Для предотвращения возникновения такого размытия фокусировки, участки, имеющие сравнительно большую вторую длину, располагаются в области, что позволяет поддержать изображение основного объекта, наряду с его съемкой. В вышеописанном примере, изображенном на Фиг. 6A, количество коротких участков превышает количество длинных участков. Их соотношение может быть полностью изменено. Расположение участков, имеющих различные длины, в области, может обеспечить определенные преимущества. Однако, как демонстрируется в порядке примера, участки, имеющие различные длины, располагаются так, чтобы количество сравнительно коротких участков, пропорция которых на экране снятого изображения является малой, превышало количество длинных участков, что с большей вероятностью предотвратит появление ближних и дальних объектов на экране, а также позволит линзе фокусироваться на изображении намеченного пользователем объекта. В вышеописанном примере, продемонстрированном на Фиг. 6A, участки, имеющие сравнительно большую вторую длину, располагаются за пределами участков, имеющих сравнительно малую первую длину. Схема расположения участков, имеющих сравнительно большую вторую длину, в пределах участков, имеющих сравнительно малую первую длину, обеспечивает определенные преимущества. Однако, как продемонстрировано на Фиг. 6A, расположение участков, имеющих сравнительно большую вторую длину, за пределами участков, имеющих сравнительно малую первую длину, может обеспечить следующее преимущество. То есть преимущество позволяет снимать видеоклип, в процессе чего намеченный пользователем основной объект появляется в сравнительном центре экрана. Короткие участки, занимающие центральную часть области, могут поместить центр изображения объекта, снятого в области, в фокусе. Это преимущество обеспечивает такую возможность, при которой изображения при съемке видеоклипа и изображения при съемке в режиме визирования по экрану могут включать в себя сцены движущихся объектов. Следовательно, представлено обсуждение того, что пользователь зачастую делает фотографии так, чтобы основной объект, который намечен находиться в фокусе, располагался в центре экрана снятого изображения, и не исчез с экрана снятого изображения. В структуре первой области, изображенной на Фиг. 6A, когда область располагается в центре экрана, количество участков, имеющих длину, аналогичную длине участка, расположенного в центре экрана а, превышает количество других участков. В качестве альтернативы, когда область располагается в центре экрана, количество участков, имеющих длину, аналогичную длине участка, расположенного в центре экрана, может быть меньше количества других участков, что обеспечивает определенные преимущества. Однако, как было описано ранее, при съемке видеоклипа, в процессе которой основной объект зачастую располагается в центре экрана, когда область располагается в центре экрана, количество участков, имеющих длину, аналогичную длине участка, расположенного в центре экрана, превышает количество других участков. Размер участка, расположенного в центре экрана снятого изображения, определяется так, чтобы линза могла сфокусироваться на изображении намеченного пользователем объекта, и, при этом, количество участков, имеющих размер, аналогичный размеру этого участка, задается наибольшим. Помимо всего прочего, даже если временно намеченный объект исчезает с участков, имеющих сравнительно малую первую длину, объект может быть снят в областях, имеющих сравнительно большую вторую длину. Соответственно, может быть достигнуто устойчивое управление фокусировкой.
В качестве комплексного эффекта может быть заметно повышена устойчивость управления фокусировкой.
Фиг. 6B изображает графическое представление, демонстрирующее структуру второй области. Структура второй области больше структуры первой области, продемонстрированной на Фиг. 6A. Располагаются два участка (611 и 617), имеющие сравнительно большую четвертую длину, которая является β'% горизонтальной длины экрана снятого изображения, и пять участков (612-616), имеющие сравнительно малую третью длину, которая является α'% горизонтальной длины экрана снятого изображения. На Фиг. 6А-6D, в порядке примера, вторая длина в два раза превышает первую длину, и равняется третьей длине, а четвертая длина в два раза превышает третью длину. Следует отметить, что коэффициенты увеличения являются попросту иллюстративными, и не устанавливают ограничения настоящего изобретения. Однако такие иллюстративные соотношения увеличения могут обеспечить более простое схемное решение или программную конфигурацию.
Далее, со ссылкой на Фиг. 12А-12C, будет описана причина обеспечения структуры сравнительно большой второй области в дополнение к структуре сравнительно малой первой области.
Например, снимается изображение объекта, продемонстрированное на Фиг. 12A. В этом случае, когда изображение объекта находится почти в фокусе, в области появляются изображения, имеющие форму двух пиков (Фиг. 12B). В данном случае, например, изображения промаркированы изображением 1501 А и изображением 1502 В, при этом искажение между двумя изображениями вычисляется с использованием способа обнаружения разности фаз для вычисления величины расфокусировки. Однако если изображение объекта сильно размыто (изображения объекта имеет большую степень размытия), то форма двух пиков подвергается искажению, приводящему к образованию формы одного пика. Кроме того, пик имеет рассредоточенные впадины. Другими словами, форма изображения объекта, которое подлежит съемке, может сильно отличаться, в зависимости от состояния фокусировки (то есть либо состояние сильного размытия, либо состояние «почти в фокусе») (Фиг. 12C).
Таким образом, в состоянии сильного размытия, в котором величина расфокусировки может быть не получена, установка структуры относительно большой второй области может повысить устойчивость фокусировки. То есть обеспечение относительно большой второй области может повысить частоту, с которой получают величину расфокусировки и направление расфокусировки.
СТРУКТУРА ОБЛАСТИ (2)
На Фиг. 6А и 6B внимание обращается на горизонтальную длину. Раскрытый в настоящем документе метод также может быть применен к схеме расположения участков в вертикальном направлении (в направлении столбца, которое является параллельным по отношению к короткому краю экрана).
Кроме того, продемонстрированный на Фиг. 5 процесс установки области был описан в порядке примера в отношении алгоритма переключения между структурой первой области, продемонстрированной на Фиг. 6A, и структурой второй области, продемонстрированной на Фиг. 6B. Альтернативно, при условии, что размер расчетной схемы или размер программы разрешает, например, как продемонстрировано на Фиг. 6C, области, пропорции которых заданы на экране снятого изображения, могут быть заблаговременно расположены так, чтобы они включали в себя как первую область, так и вторую область, а также могут быть выбраны и использованы. То есть, как продемонстрировано на Фиг. 6C, участки 621-634 располагаются в области, в которой участки 601-607, продемонстрированные на Фиг. 6A, соответствуют участкам 621-627, продемонстрированным на Фиг. 6C, а участки 611-617, продемонстрированные на Фиг. 6B, соответствуют участкам 628-634, продемонстрированным на Фиг. 6C. Соответственно, участки 621-627, выбираются и используются для структуры первой области, описанной со ссылкой на Фиг. 5, а области 628-634, выбираются и используются для структуры второй области, описанной со ссылкой на Фиг. 5.
В представленном выше описании, первая область и/или вторая область располагается в центре экрана снятого изображения. При использовании композиции перед съемкой, может быть использована структура четвертой области, которая использует сцену, в которой изображение объекта, которое пользователь или фотограф желает снять, не располагается в центре экрана снятого изображения (Фиг. 6D). Структура четвертой области также является применимой к ситуациям (не показано), когда изображение, обнаруженное с использованием функции для идентификации изображения заданного объекта, такой как функция автоматического определения лица в кадре, подлежит помещению в фокус, когда желаемый объект на экране снятого изображения должен быть помещен в фокус, в соответствии с командами, заданными посредством пользователя через операцию касания и т.п. Блок 207 управления камерой задает вышеописанную структуру области в положении, которое не находится в центре экрана, такое как положения участков 641-647, продемонстрированных на Фиг. 6D, или делает структуру области подвижной, и задает структуру области в положении, в котором было обнаружено лицо, или в положении, определенном посредством пользователя.
Следовательно, повышенная гибкость различных структур области хорошо подходит для способа автофокусировки (AF) при наличии разности фаз на плоскости изображения.
РАСЧЕТ КОЭФФИЦИЕНТА КОРРЕЛЯЦИИ
Далее, в порядке примера, будет представлено описание вычисления вышеописанной эффективной величины расфокусировки. Сначала будет описан расчет коэффициента корреляции, форма корреляционного сигнала и т.п., в качестве информации о корреляции, а затем будет описано вычисление эффективной величины расфокусировки.
Фиг. 7D изображает концептуальное графическое представление участков, в которых получают сигналы изображения, в порядке примера, на матрице пикселов элемента 201 формирования изображения, служащего в качестве датчика изображения. В матрице 701 пикселов, на которой располагается множество блоков пикселов (не показано), участок 702 является участком, который подвергается нижеописанному расчету. Участок 702 и участки 703 смещения, используемые для расчета коэффициента корреляции, при вычислении величины расфокусировки для участка 702, объединяются для формирования участка 704 смещения. Участок 704 смещения используется для расчета коэффициента корреляции.
На Фиг. 7А-7D, 8А, 8B, 9А и 9B, буквенные обозначения p, q, s и t представляют координаты в направлении оси X, где участок 704 смещения ограничен посредством диапазона p-q, а участок 702 ограничен посредством диапазона s-t.
Фиг. 7А, 7B и 7C демонстрируют сигналы изображения, полученные из участка 704 смещения, заданного на Фиг. 7D. Интервал, определенный посредством диапазона s-t, представляет сигнал изображения, соответствующий участку 702, а интервал, определенный посредством диапазона p-q, представляет сигнал изображения, соответствующий участку 704 смещения в интервале, используемом для расчета, для вычисления величины расфокусировки на основании величины изменения. Фиг. 7A изображает графическое представление, концептуально демонстрирующее формы сигнала изображения А и сигнала изображения В, которые не смещаются при расчете коэффициента корреляции. Сплошная линия 801 представляет сигнал изображения А, а пунктирная линия 802 представляет сигнал изображения В. Фиг. 7B изображает концептуальное графическое представление форм сигналов, полученных посредством смещения форм сигналов изображения, продемонстрированных на Фиг. 7A, которые не были смещены, в положительном направлении, а Фиг. 7C изображает концептуальное графическое представление форм сигналов, полученных посредством смещения форм сигналов изображения, продемонстрированных на Фиг. 7A, которые не были смещены, в отрицательном направлении. Коэффициент корреляции, который является степенью корреляции между двумя изображениями, может быть вычислен посредством, например, смещения сигнала 801 изображения А и сигнала 802 изображения В на 1 бит в соответствующих направлениях, указанных посредством стрелок.
Далее будет представлено описание способа вычисления коэффициента корреляции COR. Сначала, как продемонстрировано на Фиг. 7B и 7С, например, сигнал изображения А и сигнал изображения В смещаются на 1 бит, при этом вычисляется сумма абсолютных величин различий между сигналом изображения А и сигналом изображения B в отдельных состояниях. В данном случае величина смещения представлена посредством i с минимальным смещением p-s на Фиг. 8A, и максимальным смещением q-t на Фиг. 8A. Кроме того, x обозначает начальную координату участка измерения расстояния, а y обозначает конечную координату участка измерения расстояния. С использованием вышеупомянутых значений, сумма абсолютных величин различий между сигналом изображения А и сигналом изображения В может быть вычислена в соответствии с выражением (1), представленным ниже.
Фиг. 8A изображает концептуальное графическое представление, демонстрирующее коэффициент корреляции в виде графика формы сигнала. На графике абсцисса представляет величину смещения, а ордината представляет коэффициент корреляции. Форма 901 корреляционного сигнала имеет близкие крайние значения 902 и 903. На изображенном графике меньший коэффициент корреляции соответствует большему подобию между изображением А и изображением В.
Далее будет представлено описание способа вычисления величины изменения в коэффициенте корреляции ΔCOR. Сначала, со ссылкой на концептуальное графическое представление формы корреляционного сигнала, продемонстрированное на Фиг. 8A, вычисляется величина изменения в коэффициенте корреляции с использованием, например, различия между коэффициентами корреляции для любого другого смещения. В данном случае величина смещения представлена посредством i с минимальным смещением p-s на Фиг. 8A, и максимальным смещением q-t на Фиг. 8A. С использованием вышеупомянутых значений, величина изменения в коэффициенте корреляции может быть вычислена в соответствии с выражением (2), представленным ниже.

Фиг. 8B изображает концептуальное графическое представление, демонстрирующее величину изменения в коэффициенте корреляции ΔCOR в виде графика формы сигнала. На графике абсцисса представляет величину смещения, а ордината представляет величину изменения в коэффициенте корреляции. Форма 1001 сигнала с изменением коэффициента корреляции имеет точки 1002 и 1003, в которых величина изменения в коэффициенте корреляции изменяется с положительной на отрицательную. Величина изменения в коэффициенте корреляции, которая становится равной 0 от точки 1002, является величиной смещения между сигналом изображения А и сигналом изображения В с относительно высоким подобием между изображением А и изображением В. На данном этапе величина смещения соответствует величине расфокусировки.
Фиг. 9A изображает увеличенное графическое представление точки 1002, продемонстрированной на Фиг. 8B, на котором форма сигнала, которая является частью формы 1001 сигнала с величиной изменения в коэффициенте корреляции, представлена посредством формы 1101 сигнала. Способ вычисления величины размытия PRD расфокусированного изображения, соответствующей величине расфокусировки, будет описан в порядке примера со ссылкой на Фиг. 9A. Величина размытия расфокусированного изображения объясняется в качестве целой части β и дробной части α. Дробная часть α может быть вычислена с использованием соотношения подобия между треугольником ABC и треугольником ADE, продемонстрированными на Фиг. 9A, в соответствии с выражением (3), представленным ниже.
Далее, со ссылкой на Фиг. 9A, целая часть может быть вычислена с использованием выражения (4), представленного ниже.
β=k-1 (4)
Соответственно, величина размытия PRD расфокусированного изображения может быть вычислена с использованием суммы α и β.
Как продемонстрировано на Фиг. 8B, при наличии множества точек перехода через нуль, точки перехода через нуль с большой крутизной max der изменения в коэффициенте корреляции (далее в настоящем документе будет называться крутизной) представлены посредством первой точки перехода через нуль. Крутизна является мерой того, насколько простой является автофокусировка (AF). Чем больше значение крутизны, тем проще автофокусировка (AF). Крутизна может быть вычислена в соответствии с выражением (5), представленным ниже.

Как было описано выше, при наличии множества точек перехода через нуль, первая точка перехода через нуль определяется с использованием крутизны.
Далее, в порядке примера, будет представлено описание способа вычисления достоверности величины размытия расфокусированного изображения. Достоверность величины размытия расфокусированного изображения соответствует достоверности величины расфокусировки. Нижеследующее описание является иллюстративным, при этом для вычисления достоверности может быть использован любой другой хорошо известный способ. Достоверность может быть определена посредством вышеописанной крутизны и подобия fnclvl изображения между сигналом изображения А и сигналом изображения В (далее в настоящем документе оно будет называться подобием изображения). Подобие изображения является мерой точности величины размытия расфокусированного изображения. Меньшее значение подобия изображения соответствует большей точности. Фиг. 9B изображает увеличенное графическое представление близкого крайнего значения 902, продемонстрированного на Фиг. 8A, а также демонстрирует форму 1201 сигнала, которая является частью формы 901 корреляционного сигнала. Далее будет описан способ вычисления крутизны и подобия изображения. Подобие изображения может быть вычислено в соответствии с выражением (6), представленным ниже.
Таким способом вычисляется подобие изображения.
ВЫЧИСЛЕНИЕ ВЕЛИЧИНЫ РАСФОКУСИРОВКИ
Фиг. 10 изображает графическое представление алгоритма процесса до вычисления величины расфокусировки. В нижеследующем иллюстративном описании величина размытия расфокусированного изображения отличается от величины расфокусировки в индивидуальном порядке. В раскрытой в настоящем документе технической идее, величина расфокусировки может быть объяснена в виде абсолютного расстояния от положения фокуса или в виде количества импульсов, а также может являться понятием, отличным по характеру или содержанию от вышеупомянутого понятия, или являться иным относительным понятием. Величина расфокусировки является понятием, указывающим, насколько текущее положение линзы смещается от положения фокуса, или каким образом осуществить управление фокусировкой, чтобы привести линзу в состояние фокуса. Получение информации о расфокусировке в соответствии с вышеописанным понятием, описано в виде получения информации о фокусировке.
На этапе 1301 сигнал изображения А и сигнал изображения В получают от пиксела в положении элемента 201 формирования изображения (то есть датчика изображения), соответствующего каждому участку, который задается способом, описанным в порядке примера выше. Затем на основании полученных сигналов изображения вычисляется коэффициент корреляции (этап 1302). Затем на основании вычисленного коэффициента корреляции вычисляется величина изменения в коэффициенте корреляции (этап 1303). Затем на основании вычисленной величины изменения в коэффициенте корреляции вычисляется величина размытия расфокусированного изображения (этап 1304). Кроме того, вычисляется достоверность, указывающая, насколько достоверной является вычисленная величина размытия расфокусированного изображения (этап 1305). Вышеописанные операции процесса обработки выполняются несколько раз, в соответствии с количеством участков, находящихся в области.
Затем величина размытия расфокусированного изображения преобразуется в величину расфокусировки для каждого участка, находящегося в области (этап 1306). Помимо всего прочего, вычисляется эффективная величина расфокусировки и эффективное направление расфокусировки (этап 1307 и этап 1308).
ВЫЧИСЛЕНИЕ ЭФФЕКТИВНОЙ ВЕЛИЧИНЫ РАСФОКУСИРОВКИ
Фиг. 11 изображает графическое представление алгоритма процесса вычисления величины расфокусировки, соответствующей области, в качестве эффективной величины расфокусировки, продемонстрированной в вышеописанном этапе 1307. Расчет коэффициента корреляции, выполняемый посредством блока 204 обработки сигналов автофокусировки (AF), будет описан со ссылкой на Фиг. 7А-10.
При вычислении эффективной величины расфокусировки, сначала, блок 204 обработки сигналов автофокусировки (AF) отслеживает множество участков в области на предмет поиска участка, для которого была получена величина расфокусировки, и достоверность величины расфокусировки для которого является высокой. В результате поиска вычисляется среднее значение величин расфокусировки для участков, которые удовлетворяют условиям (этап 1401).
Затем блок 204 обработки сигналов автофокусировки (AF) вычисляет различие между величиной расфокусировки для каждого участка и средним значением, вычисленным на этапе 1401 (этап 1402). Затем блок 204 обработки сигналов автофокусировки (AF) определяет, является ли максимальное значение вычисленных различий для соответствующих участков превышающим или равным заданному значению (этап 1403). То есть блок 204 обработки сигналов автофокусировки (AF) определяет, является ли каждая из соответствующих величин расфокусировки для множества участков в области величиной расфокусировки с большим отклонением. Если максимальное значение вычисленных различий для соответствующих участков меньше заданного значения (отрицательный результат определения, выполняемого на этапе 1403), то блок 204 обработки сигналов автофокусировки (AF) задает среднее значение, вычисленное на этапе 1401, в качестве эффективной величины расфокусировки (этап 1404). В противном случае, если максимальное значение вычисленных различий для соответствующих участков превышает или равняется заданному значению (положительный результат определения, выполняемого на этапе 1403), то блок 204 обработки сигналов автофокусировки (AF) удаляет величину расфокусировки для участка, соответствующего максимальному различию от цели, на основании которой вычисляется среднее значение (этап 1405). Другими словами, величина расфокусировки с большим отклонением в числе соответствующих величин расфокусировки для множества участков в области удаляется из цели вычисления.
Блок 204 обработки сигналов автофокусировки (AF) определяет, существует ли какая-либо величина расфокусировки для оставшегося участка (этап 1406). Если величина расфокусировки для оставшегося участка существует (положительный результат определения, выполняемого на этапе 1406), то блок 204 обработки сигналов автофокусировки (AF) возвращается на этап 1401, и циклически выполняет процесс. Если текущая величина расфокусировки является величиной для последнего участка, то есть, если оставшейся величины расфокусировки не существует (отрицательный результат определения, выполняемого на этапе 1406), то блок 204 обработки сигналов автофокусировки (AF) определяет отсутствие получения эффективной величины расфокусировки, и не задает эффективную величину расфокусировки (этап 1407). Эффективное направление расфокусировки подвергается процессу обработки, подобному процессу обработки, применяемому к эффективной величине расфокусировки. Помимо всего прочего, для получения эффективного направления расфокусировки, например, множество участков отслеживаются на предмет поиска участков, для которых была получена величина расфокусировки, и достоверность величины расфокусировки для которых является высокой, или участков, достоверность величины расфокусировки для которых является «средней», при этом направление, которое имеет наибольшее количество участков в числе участков, задается в качестве эффективного направления расфокусировки.
В вышеописанном примере, в порядке примера, величина расфокусировки для участков, соответствующих максимальному различию, удаляется в качестве величины расфокусировки с большим отклонением от цели, на основании которой вычисляется среднее значение (этап 1405). В качестве альтернативы удалению величины расфокусировки с большим отклонением от цели вычисления, присваивание малого весового коэффициента для величины расфокусировки с большим отклонением также обеспечит определенные преимущества. В этом случае, однако, из-за весового коэффициента, изображение основного объекта может быть расфокусировано.
Таким образом, величина расфокусировки с большим отклонением в числе соответствующих величин расфокусировки для множества участков в области не используется по следующей причине. Поскольку величина расфокусировки для области вычисляется с использованием величин расфокусировки для множества участков, из-за размера области, риск возникновения близких и дальних объектов на экране является относительно большим.
ПРИОРИТЕТ КРУПНОГО ПЛАНА
На Фиг. 11, в порядке примера, эффективная величина расфокусировки в большей степени вычисляется в направлении крупного плана, чем в направлении дальности, поскольку изображение объекта, которое пользователь или фотограф желает поместить в фокус, вероятнее всего, располагается в положении крупного плана, а не на заднем плане. Другими словами, фотограф зачастую фокусирует линзу на изображении объекта, расположенного в положении крупного плана, при этом изображение объекта, расположенного в положении крупного плана, вероятнее всего, будет являться изображением объекта, намеченным посредством фотографа. Соответственно, например, в процессе вычисления различия между величиной расфокусировки для заданного участка в области и средним значением для области (этап 1402), различие между величиной расфокусировки и средним значением умножается на значение, которое меньше 1, если величина расфокусировки связана с направлением расфокусировки, направленным к положению крупного плана. В альтернативном примере, на этапе 1403 заданное значение увеличивается. Соответственно, величина расфокусировки, связанная с направлением расфокусировки, направленным к положению крупного плана, с относительно меньшей вероятностью будет равна величине расфокусировки для максимального значения в числе вычисленных различий для соответствующих участков. Это может повысить вероятность использования величины расфокусировки для участка, для которого изображение объекта располагается в положении крупного плана, в числе множества участков в области, благодаря чему достигается управление фокусировкой с приоритетом крупного плана. Однако способ для приоритета крупного плана не ограничивается вышеописанным способом, при этом величина расфокусировки, связанная с направлением расфокусировки, направленным к положению крупного плана, относительно средней величины расфокусировки, может быть удалена из цели, на основании которой получают различие средней величины расфокусировки.
В представленном выше описании процесс усреднения был описан в порядке примера в качестве способа получения информации о расфокусировке, соответствующей области, с использованием множества частей информации о фокусировке, выводимой для области. В качестве альтернативы усреднению, например, для вычисления величины расфокусировки может быть использован определенный весовой коэффициент. Таким образом, информацию о расфокусировке для области получают с использованием множества частей информации о фокусировке, выводимой для области, по следующей причине. Если величина расфокусировки выбирается из числа соответствующих величин расфокусировки для множества участков в области, то изображение объекта может быть снято в виде «линий» или «точек», при этом управление фокусировкой также может быть осуществлено на различиях между величинами расфокусировки для участков, в которых изображение объекта снято в виде «линий» или «точек», что может являться неподходящим для изображений в режиме визирования по экрану или изображений видеоклипа. Для сравнения, техническая идея усреднения величин расфокусировки для соответствующих участков позволяет выполнять съемку изображения объекта в виде «плоскости», что сокращает количество проблем, которые могут возникнуть в процессе управления фокусировкой на основании различия между величинами расфокусировки для каждого участка, при котором изображение объекта снимается в виде «линий» или «точек», наряду с обеспечением гарантии точности фокусировки на изображении намеченного пользователем объекта, как было описано выше в порядке примера. Кроме того, подобные преимущества могут быть достигнуты посредством получения информации о расфокусировке для области посредством использования множества частей информации о фокусировке, выводимой с использованием процесса взвешивания, вместо процесса усреднения.
Как было описано выше, усреднение множества величин расфокусировки в области для изображения объекта, подлежащего съемке в виде одного объекта, может предотвратить или сократить изменения в величине расфокусировки для каждого участка в области, а также может добиться устойчивого управления фокусировкой.
ДРУГИЕ ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ
Несмотря на подробное описание варианта осуществления настоящего изобретения, настоящее изобретение не ограничивается конкретным вышеописанным вариантом осуществления, при этом различные варианты осуществления, не выходящие за пределы объема изобретения, также охватываются посредством настоящего изобретения. Некоторые отличительные признаки вышеописанного варианта осуществления могут быть использованы в сочетании, в зависимости от ситуации.
Программное обеспечение, которое реализует функции вышеописанного варианта осуществления, может быть передано системе, прибору или устройству, содержащему компьютер, выполненный с возможностью выполнения программы непосредственно с носителя записи или через проводную/беспроводную связь, и может быть выполнено. Выполнение программы также находится в пределах объема настоящего изобретения.
Соответственно, код программы, который передается и устанавливается на компьютер для реализации функций и процессов настоящего изобретения на компьютере, также составляет вариант осуществления настоящего изобретения. Другими словами, компьютерная программа для реализации функций и процессов настоящего изобретения также находится в пределах объема настоящего изобретения.
В этом случае программа любой формы, как например объектный код, программа, реализуемая с помощью интерпретатора, или данные сценария выполнения, переданные операционной системе (OS), может быть использована до тех пор, пока обеспечиваются функции программы.
Примеры носителей записи для передачи программы могут включать в себя магнитный носитель записи, такую как жесткий диск и магнитная лента, оптическую/магнитно-оптическую среду хранения и энергонезависимую полупроводниковую память.
Программа может быть передана следующим образом. Компьютерная программа, составляющая вариант осуществления настоящего изобретения, может быть сохранена на сервере в компьютерной сети, а компьютер клиента, который обращается к серверу, может загрузить компьютерную программу и выполнить компьютерную программу.
Наряду с тем, что настоящее изобретение было описано со ссылкой на конкретные варианты осуществления, следует понимать, что изобретение не ограничивается раскрытыми вариантами осуществления. Объем нижеследующей формулы изобретения должен получить самую широкую интерпретацию, чтобы охватить все подобные модификации и эквивалентные структуры и функции.
Изобретение относится к управлению фокусировкой для устройств формирования изображения. Техническим результатом является повышение устойчивости управления фокусировкой. Результат достигается тем, что блок получения выполнен с возможностью получения первой информации о расфокусировке на основании выходных данных датчика, соответствующих первому участку в области снятого изображения, и получения второй информации о расфокусировке на основании выходных данных датчика, соответствующих второму участку в области. Блок управления выполнен с возможностью получения информации о расфокусировке, соответствующей области, с использованием первой информации о расфокусировке и второй информации о расфокусировке и осуществления управления фокусировкой на основании полученной информации о расфокусировке. Первый участок имеет длину в направлении обнаружения разности фаз, которая превышает длину второго участка. 2 н. и 16 з.п. ф-лы, 23 ил.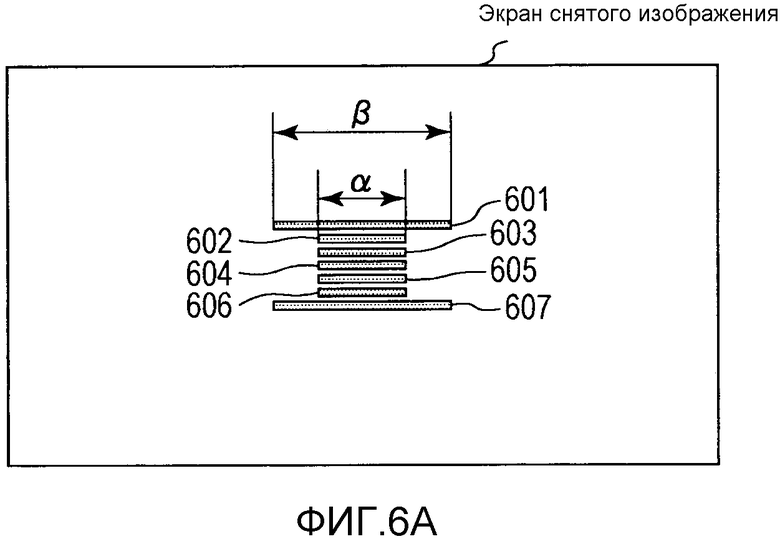
1. Устройство (20) управления фокусировкой для обнаружения разности фаз между двумя изображениями для получения информации о расфокусировке, содержащее:
средство (207) получения для получения первой информации о расфокусировке на основании выходных данных датчика (201) изображения, соответствующих первому участку (601, 607) в области снятого изображения, и получения второй информации о расфокусировке на основании выходных данных датчика изображения, соответствующих второму участку (602-606) в области; и
средство (204) управления для получения информации о расфокусировке, соответствующей области, с использованием первой информации о расфокусировке и второй информации о расфокусировке и осуществления управления фокусировкой на основании полученной информации о расфокусировке,
причем первый участок (601, 607) имеет длину, которая превышает длину второго участка (602-606) в направлении обнаружения разности фаз.
2. Устройство (20) управления фокусировкой по п. 1, в котором область включает в себя множество первых участков (601, 607) и множество вторых участков (602-606), при этом количество вторых участков превышает количество первых участков (601, 607), включенных в область.
3. Устройство (20) управления фокусировкой по п. 1, в котором область включает в себя множество участков (601-607) и множество участков, включенных в область, включает в себя наибольшее количество самых коротких участков (602-606).
4. Устройство (20) управления фокусировкой по любому из пп. 1-3, в котором первый участок (601, 607) расположен за пределами второго участка (602-606) в области.
5. Устройство (20) управления фокусировкой по любому из пп. 1-3, в котором средство (204) управления выполнено с возможностью перемещения области в снятом изображении.
6. Устройство (20) управления фокусировкой по любому из пп. 1-3, в котором средство (204) управления выполнено с возможностью изменения размера области в снятом изображении.
7. Устройство (20) управления фокусировкой по п. 6, в котором средство (204) управления выполнено с возможностью сокращения размера области после достижения фокусировки.
8. Устройство (20) управления фокусировкой по п. 6, в котором средство (204) управления выполнено с возможностью переключения размера области перед осуществлением поискового привода.
9. Устройство (20) управления фокусировкой по п. 6, в котором средство (204) управления выполнено с возможностью изменения размера области таким образом, чтобы в процессе поискового привода была получена малая область.
10. Устройство (20) управления фокусировкой по п. 6, в котором длина первого участка (601, 607) и длина второго участка (602-606) изменяются в соответствии с изменением размера области.
11. Устройство (20) управления фокусировкой по п. 1, в котором информация о расфокусировке выводится после присваивания информации о расфокусировке весового коэффициента, чтобы весовой коэффициент, присвоенный информации о фокусировке ближней стороны, превышал весовой коэффициент, присвоенный информации о фокусировке дальней стороны.
12. Устройство (20) управления фокусировкой по п. 1, в котором пара изображений выводится из положения датчика (201) изображения, соответствующего каждому из первого участка (601, 607) и второго участка (602-606), при этом каждая из первой информации о расфокусировке и второй информации о расфокусировке основана на разности фаз между парой изображений.
13. Устройство (20) управления фокусировкой по п. 12, причем направление обнаружения разности фаз, в котором проходят длина первого участка (601, 607) и длина второго участка (602-606), представляет собой направление, в котором обнаруживается разность фаз.
14. Устройство (20) управления фокусировкой по п. 12, в котором каждая из первой информации о расфокусировке и второй информации о расфокусировке являются информацией о корреляции между двумя изображениями.
15. Устройство (20) управления фокусировкой по п. 1, дополнительно содержащее датчик (201) изображения,
причем датчик (201) изображения включает в себя:
множество микролинз, и
множество светоприемных блоков для каждой из множества микролинз.
16. Устройство (20) управления фокусировкой по п. 1, дополнительно содержащее датчик (201) изображения,
причем датчик (201) изображения включает в себя:
множество микролинз и
блоки пикселов, каждый из которых имеет светоприемные блоки, имеющие различные положения отверстий для каждой из множества микролинз.
17. Устройство (20) управления фокусировкой по п. 1, в котором средство (204) управления выполнено с возможностью получения информации о расфокусировке, соответствующей области, с использованием среднего значения множества частей информации о расфокусировке, выводимой для первого участка (601, 607) и второго участка (602-606).
18. Способ управления для устройства (20) управления фокусировкой, содержащий:
этап вывода первой информации о фокусировке, на котором выводят информацию о фокусировке, соответствующую первому участку (601, 607);
этап вывода второй информации о фокусировке, на котором выводят информацию о фокусировке, соответствующую второму участку (602, 606),
причем первый участок (601, 607) и второй участок (602, 606) расположены в области снятого изображения; и
этап управления, на котором получают информацию о расфокусировке, соответствующую области, с использованием выводимой информации о фокусировке, соответствующей первому участку (601, 607), и выводимой информации о фокусировке, соответствующей второму участку (602, 606), и осуществляют управление фокусировкой на основании полученной информации о расфокусировке,
причем первый участок (601, 607) в области длиннее второго участка (602, 606) в области.
| US 5995144 A, 1999.11.30 | |||
| УСТРОЙСТВО СЪЕМКИ ИЗОБРАЖЕНИЯ | 2009 |
|
RU2474850C1 |
| US 2010245656 A1, 2010.09.30 | |||
| US 2011273608 A1, 2011.11.10 | |||
| US 2006018650 A1, 2006.01.26 | |||
| УСТРОЙСТВО И СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2458401C2 |
| US 2012242886 A1, 2012.09.27 | |||
| Устройство автоматической фокусировки зеркального фотоаппарата | 1985 |
|
SU1377811A1 |

