Область техники
Настоящее изобретение относится к способу и системе регулирования мощности в случае отказа по меньшей мере одного двигателя летательного аппарата.
Настоящее изобретение относится к механизации летательных аппаратов, то есть по существу как к механизации самолетов (реактивными двигателями, турбореактивными двигателями, турбовинтовыми двигателями), так и к механизации вертолетов (газотурбинный двигатель).
Двигатель летательного аппарата обычно содержит в упрощенном виде узел компрессор - камера сгорания - турбина, образующий газогенератор. В результате сгорания сжатые горячие газы расширяются в турбине, которая механически приводит в действие компрессор посредством вала высокого давления (сокращенно HP) для образования каскада HP. Эти газы обеспечивают создание тяговой силы, а также в случае работы в номинальном режиме AEO (сокращенно от англ. «all engines operating», а именно «со всеми работающими двигателями») являются источником нетяговой энергии, а именно электрической и/или пневматической энергии.
Таким образом, энергия обеспечивается в течение времени, которое соответствует одному уровню мгновенной передачи мощности. Для самолетов тяговая энергия образуется в форме тяги как прямым образом (в реактивных двигателях), так и непрямым образом посредством каскада низкого давления BP (в турбовентиляторных двигателях или турбовинтовых двигателях). Для вертолетов тяговая энергия передается на несущий винт, вращающийся посредством коробки передачи мощности (в общем называемой BTP).
В случае отказа одного двигателя (сокращенно OEI от англ. «One Engine Inoperative», а именно «с одним неработающим двигателем») один или несколько двигателей, которые продолжают работать, обеспечивают поддержание тяговой силы и нетяговой энергии для обеспечения летательного аппарата. В случае летательного аппарата, использующего в качестве источника энергии «только электричество» или главным образом электричество, работа пневматической установки обеспечивается электрической энергией от электрической установки посредством соответствующих преобразователей.
Уровень техники
В целом в случае выхода из строя маршевого двигателя, то есть в режиме OEI, один или несколько двигателей, которые продолжают работать, компенсируют, по меньшей мере частично, такой выход из строя для одновременного поддержания тяговой силы летательного аппарата и источников нетяговых усилий. Однако, хотя двигатели обладают запасом для обеспечения избыточной мощности в особых условиях, например в режиме OEI, на самом деле оказывается, что этой мощности недостаточно для одновременного обеспечения тяговой силы, восстановления допустимых условий полета на всех этапах полета, а также отбора воздуха от компрессора не в целях приведения в движение, необходимого для потребителей (кондиционирование воздуха в кабине, система шасси и т.д.). В частности, важность отбора воздуха от компрессора может ограничивать разгонные характеристики на переходных этапах.
Одно решение заключается в оказании помощи, по меньшей мере частично, силовой установке, которая продолжает работать или «уцелела», за счет APU летательного аппарата. APU (сокращенно от англ. «Auxiliary Power Unit», а именно «вспомогательная силовая установка) обычно устанавливают на летательных аппаратах для снабжения энергией при стоянке на земле различных потребляющих агрегатов (электрических, пневматических и гидравлических) и запуска основных двигателей.
APU представляет собой «упрощенный» турбореактивный двигатель: обычно он состоит из газогенератора и средств прямого привода агрегатов летательного аппарата (служебного компрессора, электрогенератора и/или электрогенератора со стартером и т.д.) или привода через коробку передачи мощности с регулировкой скорости вращения. Отбор воздуха на выходе из служебного компрессора или расположенного сразу после входного устройства компрессора обеспечивает пневматический пуск основных двигателей.
Когда двигатель находится в неисправном состоянии, некоторые APU достаточно обеспечены для повторного запуска во время полета с целью повторного запуска отказавшего двигателя и/или подачи части электрической энергии агрегатам в полете.
Однако эксплуатация APU в полете обуславливает необходимость ее правильного повторного запуска и снижения летательного аппарата ниже определенной высоты для того, чтобы она могла генерировать достаточно пневматической энергии. Если летательный аппарат должен оставаться выше этой высоты, например ввиду условий полета, пневматическую энергию будет продолжать генерировать только один или несколько уцелевших двигателей.
Включение APU создает ряд недостатков: повторный запуск APU обуславливает необходимость в дополнительной рабочей нагрузке и контроле в момент, когда пилот, кроме прочего, должен сохранять всю свою готовность; время повторного запуска APU в среднем составляет 90 секунд, что означает, что она начинает действовать не сразу; изменение плана полета с потолком, ниже максимально допустимого в случае выхода из строя одного основного двигателя для обеспечения генерирования APU достаточной пневматической энергии; если летательный аппарат должен оставаться выше определенной высоты, APU обеспечивает только подачу электрической энергии, и один или несколько уцелевших двигателей не полностью разгружены от отбора энергии.
Сущность изобретения
Целью настоящего изобретения является устранение этих недостатков. Для этого посредством дополнительного генерирования нетяговой мощности обеспечивается резерв мощности, действующий непрерывно, и источником которого является дополнительная основная силовая установка (сокращенно GPP) типа двигателя. Силовая установка называется типа двигателя, поскольку архитектура и рабочие характеристики генерируемой мощности соответствуют сертификации двигателя для применения на всех этапах полета, аналогично мощности, генерируемой основным двигателем летательного аппарата. GPP содержит газогенератор, размеры которого находятся между традиционной APU и основным двигателем самолета.
Дополнительная установка генерирования мощности типа GPP рассчитана таким образом, чтобы без промедления полностью или частично удовлетворять нетяговым энергетическим потребностям летательного аппарата. Непрерывное применение GPP можно регулировать как для пневматического и электрического снабжения, так и в основном для электрического снабжения, например, когда кондиционирование воздуха в кабине осуществляется за счет электрической энергии. Кроме того, по сравнению с оснащением APU, высота полета самолета в режиме OEI может быть увеличена до максимального потолка, допустимого в режиме OEI, при оснащении самолета установкой GPP.
Более конкретно, целью настоящего изобретения является способ регулирования мощности в случае отказа по меньшей мере одного двигателя летательного аппарата. Летательный аппарат содержит центральный блок цифровой обработки данных, обеспечивающий функцию аварийного срабатывания для создания аварийного сигнала. Способ предусматривает применение основной силовой установки типа двигателя, называемой GPP, управляемой посредством функции контроля и отслеживания и работающей в непрерывном режиме в полете, при этом обеспечивающей часть общей номинальной нетяговой мощности летательного аппарата, увеличение пределов ее работы для почти мгновенного обеспечения при получении аварийного сигнала нетяговых мощностей, увеличенных в соответствии с по меньшей мере тремя аварийными режимами в случае указанного отказа двигателя в ответ на дополнительное потребление с GPP. Каждый аварийный режим имеет максимальный период действия, переходящий из одного режима в другой и распределяемый на несколько чередующихся последовательностей. Эти режимы, распределенные в порядке уменьшения уровня мощности, предусматривают, по меньшей мере: режим особой опасности, при котором обеспечивается вся или часть нетяговой мощности, увеличенной на прирост мощности, режим максимальной опасности, при котором обеспечивается вся или часть нетяговой мощности, и режим средней опасности, при котором обеспечивается минимальная доля нетяговой мощности, соответствующая остаточной располагаемой мощности, в непрерывном режиме до конца полета. Функция управления и отслеживания установки GPP отсчитывает время, затраченное на каждый аварийный режим, оповещая центральный блок обработки в сочетании с выдачей аварийного сообщения в случае превышения максимальных периодов действия, выделенных для каждого аварийного режима. Кроме того, функция аварийного срабатывания регулирует отбор нетяговой мощности летательного аппарата между основными двигателями и установкой GPP либо автоматически, либо в соответствии с командой пилота в зависимости от сведений о затраченном времени на режим и предупреждении о превышении предела использования аварийного режима.
Преимущественно периоды действия режимов используют в зависимости от управления выходом из строя одного или нескольких двигателей. Режим малой мощности можно применять вместо режима высокой мощности во время установленного периода: режим особой опасности достигается только на этапе попытки повторного запуска двигателя, режим максимальной опасности достигается в случае отказа одного или нескольких двигателей, например, на этапе восстановления траектории и/или высоты летательного аппарата при одновременном обеспечении всей или части нетяговой мощности летательного аппарата. Режим обеспечения мощности средней опасности может действовать только на этапе поддержания доли нетяговой мощности в случае окончательного отказа по меньшей мере одного двигателя во время периода до конца полета с разгружением, максимум, одного или нескольких продолжающих работать двигателей.
В частности, режим обеспечения мощности средней опасности совместим с полетами, установленными согласно с маршрутами, удаленными от аварийного аэропорта, в частности в случае аварийной ситуации: речь идет о международных правилах ETOPS (сокращенно от «Extended-Range Twin-Engine Operations Performance Standard», то есть «Расширенные правила полетов для двухдвигательных реактивных самолетов») или о будущих правилах, действующих для всех типов самолетов.
Согласно некоторым вариантам осуществления в случае отказа одного из двигателей летательного аппарата, обеспечивающих нетяговую мощность, во время их работы, один способ регулирования предусматривает приведение в действие только режима средней опасности установки GPP с целью компенсировать работу отказавшего двигателя (Ml), при этом один или несколько работающих двигателей продолжают генерировать общую нетяговую мощность с той же нагрузкой.
Альтернативно согласно другому способу регулирования три режима могут приводиться в действие последовательно и поочередно с разгрузкой одного или нескольких работающих двигателей по нетяговой мощности, в случае если отказавший двигатель не удалось снова запустить, а именно: чередующаяся последовательность режима максимальной опасности с обеспечением по меньшей мере части нетяговой мощности, за которым следует потребление мощности, соответствующее режиму особой опасности при попытке повторного запуска отказавшего двигателя во время, максимум, всего установленного периода, выделенного для этого режима, перед возвращением в режим максимальной опасности с тем же обеспечением общей нетяговой мощности, при этом последний режим может длиться до завершения установленного периода, выделенного для этого режима.
Кроме того, в случае повторного запуска отказавшего двигателя функция аварийного срабатывания распределяет нетяговую мощность между двумя двигателями и установкой GPP, которые снова функционируют в номинальном режиме нетяговой мощности, установившемся вплоть до конца полета, при этом определенную часть этой мощности обеспечивает установка GPP, а дополнительную часть обеспечивают два двигателя (M1, М2). Альтернативно в случае неудавшегося повторного запуска отказавшего двигателя функция аварийного срабатывания прекращает разгрузку работающего двигателя, возобновляя обеспечение им нетяговой мощности либо автоматически в зависимости от летных данных, либо в соответствии с командой пилота, если, по его мнению, условия полета это позволяют, и приводит в действие установку GPP в режиме средней мощности до конца полета.
Таким образом, преимущественно самолет обеспечен дополнительными ресурсами посредством установки GPP для восстановления допустимых условий полета за счет временной разгрузки двигателя, который продолжает работать.
В случае отказа двух двигателей способ регулирования, осуществляемый функцией аварийного срабатывания, предусматривает приведение в действие чередующейся последовательности, описанной выше, обеспечивая действие режима максимальной опасности, за которым следует режим особой опасности при попытке повторного запуска одного двигателя, перед возвращением в режим максимальной опасности. Затем в случае повторного запуска двигателя функция аварийного срабатывания переориентирует либо в соответствии с командой пилота, если, по его мнению, условия полета это позволяют, либо автоматически в зависимости от летных данных, часть потребителей к повторно запущенному двигателю (М2), который обеспечивает часть нетяговой мощности, и другую часть потребителей к установке GPP, которая работает в режиме средней опасности (RI) до конца полета.
Альтернативно, если двигатель повторно не запускается, режим обеспечения мощности максимальной опасности используют до завершения периода его действия, затем потребление нетяговой мощности снижают посредством функции аварийного срабатывания для перехода в режиме средней опасности.
Факультативно, когда вся нетяговая мощность обеспечивается только установкой GPP в режиме средней опасности, турбина RAT (сокращенно от англ. «Ram Air Turbine», а именно «турбина с приводом от набегающего потока воздуха») может обеспечивать дополнительную нетяговую мощность.
Настоящее изобретение также относится к системе регулирования мощности в случае отказа по меньшей мере одного двигателя летательного аппарата. Эта система содержит центр управления полетом, называемый органом управления самолетом, оснащенный блоком цифровой обработки данных, модуль обслуживания летательного аппарата и модули контроля и отслеживания, называемые FADEC установки GPP, и двигатели. FADEC установки GPP оснащен счетчиками времени, которое затрачивается на аварийные режимы, создаваемые функцией аварийного срабатывания в блоке обработки, которая распределяет обеспечение нетяговых мощностей между установкой GPP и двигателями посредством их FADEC. Двунаправленные каналы передачи данных соединяют центр управления самолетом с FADEC и эти FADEC с установкой GPP и двигателями для обеспечения возможности управления расходом потребителей в зависимости от указанных затрачиваемых периодов времени и сведений о состоянии двигателей и установки GPP, передаваемых от FADEC в модуль обслуживания и пилоту через блок обработки.
Преимущественно указанные затрачиваемые периоды времени и сведения о достигаемых уровнях мощности и состоянии двигателей и установки GPP, передаваемые от FADEC в модуль обслуживания через блок обработки, позволяют выполнять оптимизированное профилактическое обслуживание и упрощенное планирование работ по обслуживанию в случае повреждения установки GPP.
Краткое описание чертежей
Другие аспекты, характеристики и преимущества настоящего изобретения станут понятными из приведенного ниже неограничивающего описания характерных вариантов осуществления со ссылками на прилагаемые графические материалы, на которых:
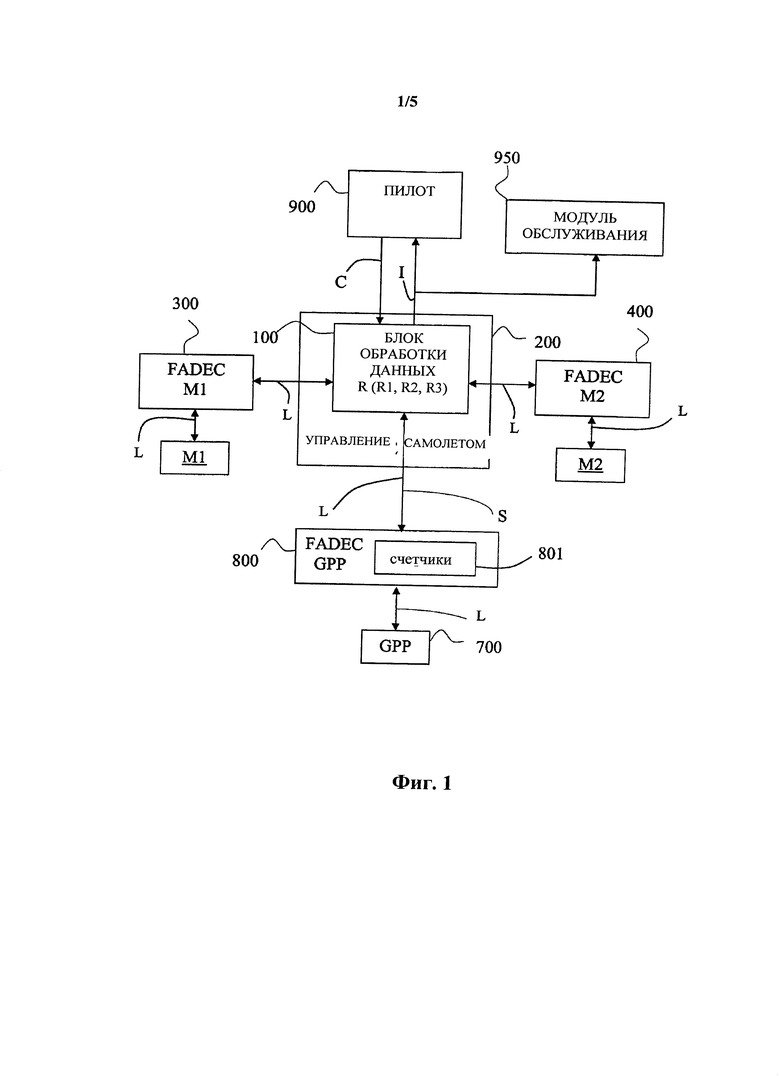
- на фиг. 1 показана блок-схема взаимодействующих агрегатов системы регулирования в соответствии с настоящим изобретением;
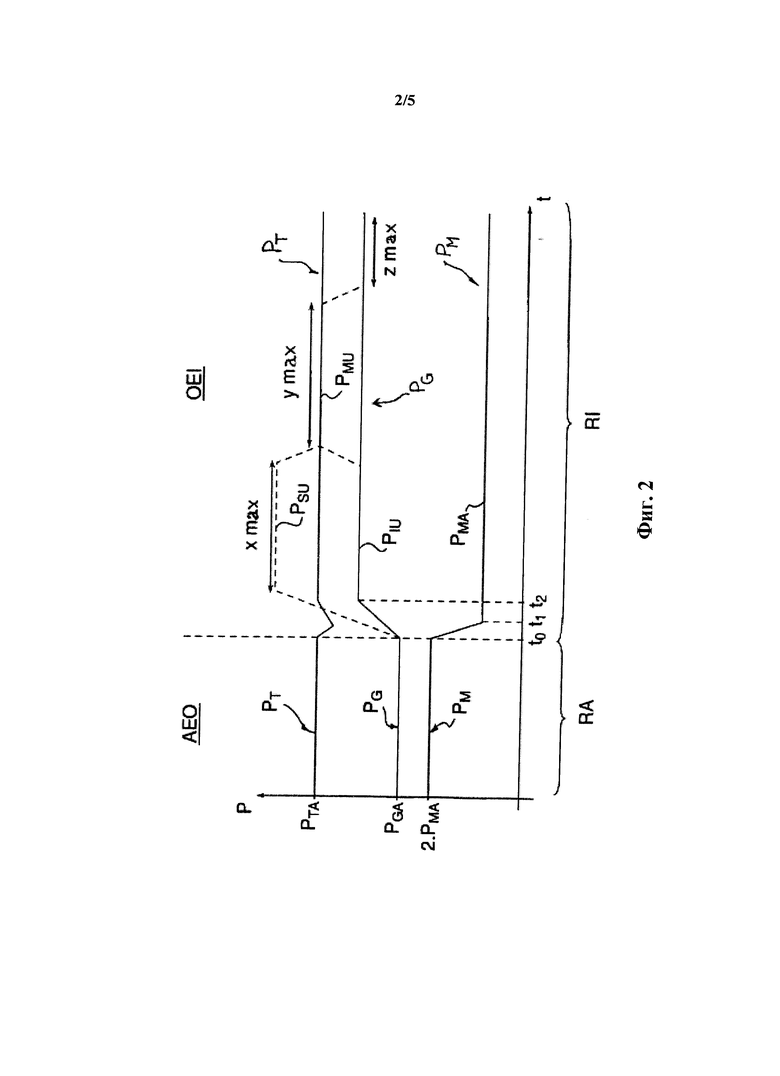
- на фиг. 2 показан график примера управления нетяговыми мощностями при аварийном регулировании в соответствии с настоящим изобретением в случае выхода из строя одного двигателя без попытки повторного запуска этого двигателя;
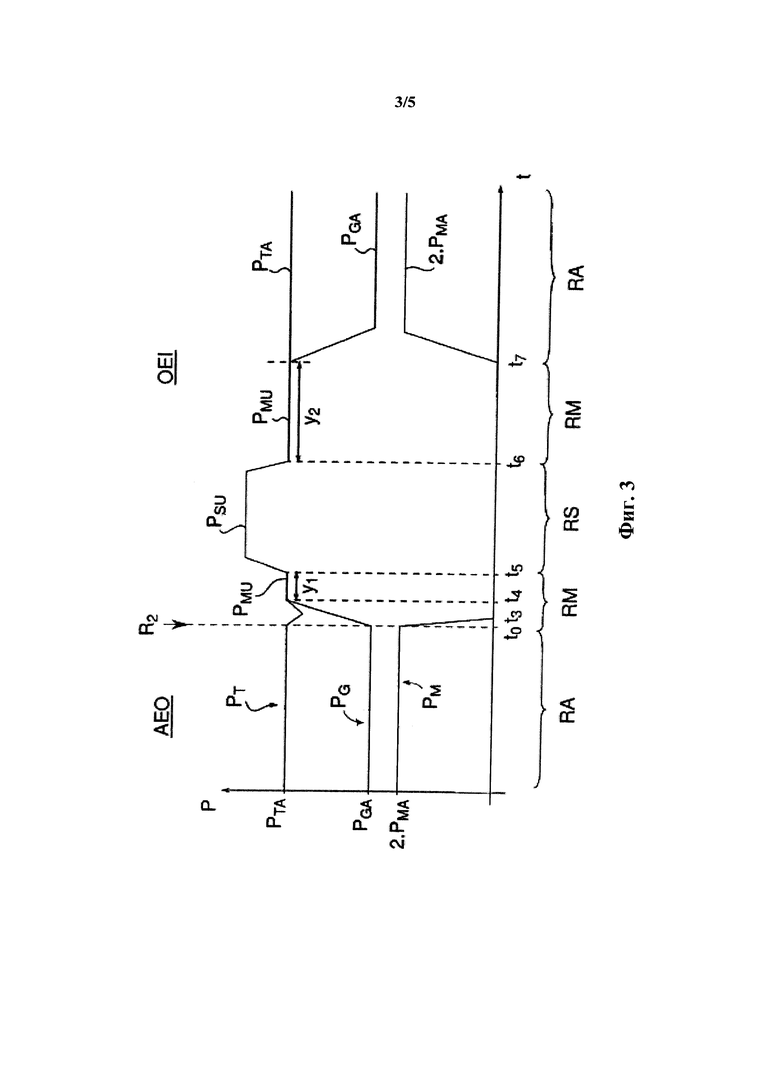
- на фиг. 3 показан график такого управления при указанном выше регулировании в случае выхода из строя одного двигателя и в случае повторного запуска отказавшего двигателя после попытки повторного запуска;
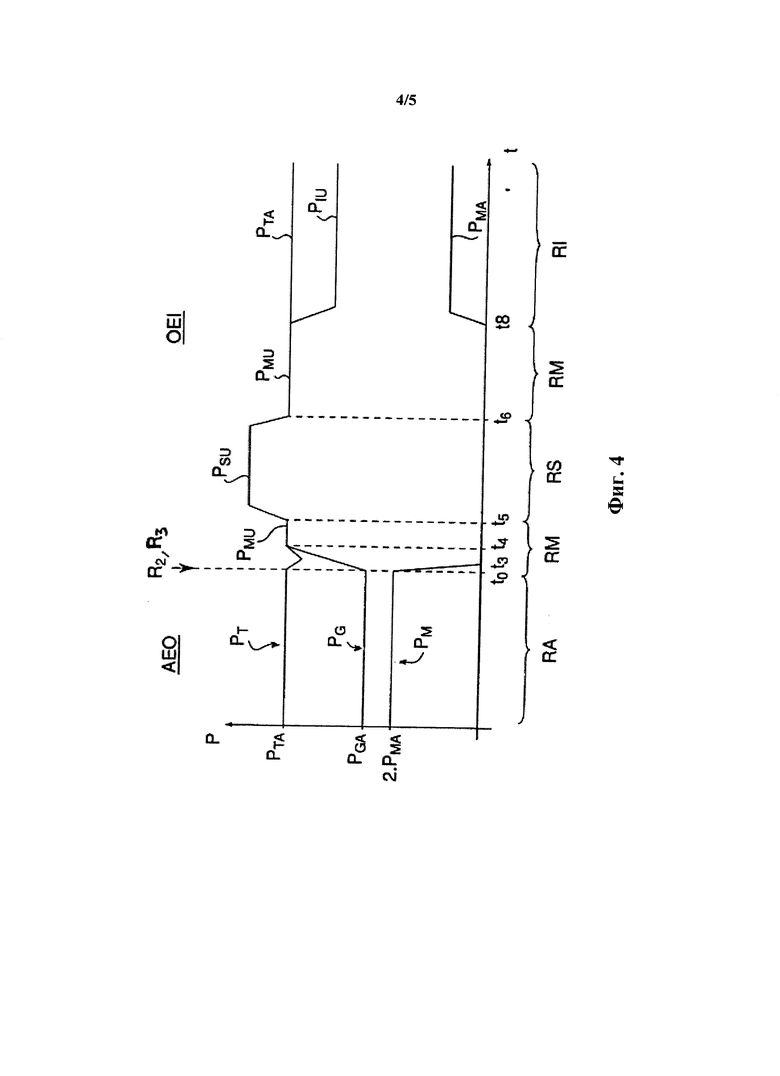
- на фиг. 4 показан график аварийного управления посредством указанного выше регулирования, в случае если отказавший двигатель повторно не запускается после такой попытки; на этом графике также показано аварийное регулирование нетяговыми мощностями в случае выхода из строя двух двигателей с повторным запуском одного отказавшего двигателя после такой попытки; и
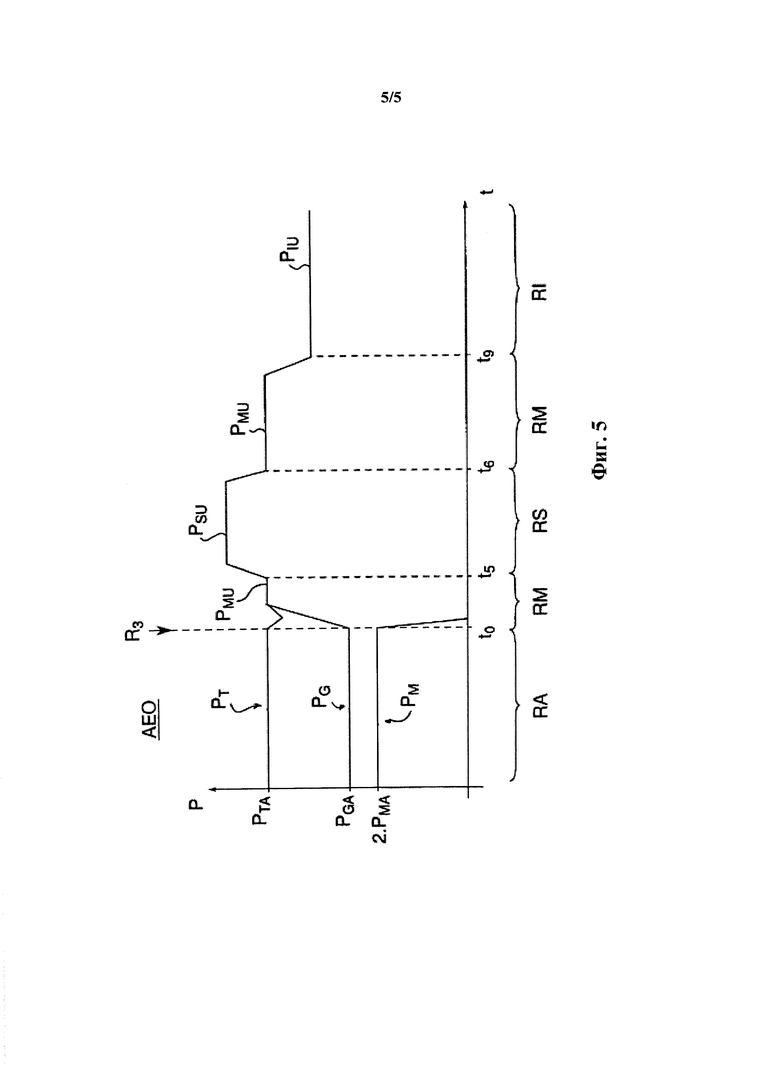
- на фиг. 5 показан график регулирования в случае выхода из строя двух двигателей при неудавшейся попытке повторного запуска двигателя.
Подробное описание изобретения
На фиг. 2-5 на графиках показано изменение нетяговых мощностей P согласно режимам управления, удовлетворяющих потребности самолета в электрической и пневматической энергии, в зависимости от времени «t» протекания полета самолета с двумя двигателями. Разные переменные нетяговые мощности указаны одинаково на оси времени на соответствующих отрезках времени:
- нетяговая мощность PM, обеспечиваемая силовой установкой, объединяющей в данном случае два турбореактивных двигателя, обозначенных как двигатели M1 и М2;
- мощность PG, обеспечиваемая установкой GPP, приведена выше; и
- общая нетяговая мощность PT, обеспечиваемая двигателями и установкой GPP для совместного обеспечения энергетических потребностей (электрических и пневматических).
В частности, нетяговые мощности в номинальном режиме основных двигателей (называемом режим « АЕО », сокращенно от англ. «АН Engines Operative», что означает «со всеми работающими двигателями») представлены как: 2PMA силовой установки, образованной основными двигателями M1 и М2 (PMA для каждого из этих двигателей), а мощность основной силовой установки GPP обозначена как PGA.
Установка GPP также выполнена с возможностью обеспечения различных уровней дополнительных мощностей, соответствующих различным аварийным режимам, последовательным или чередующимся в зависимости от необходимости, в случае отказа по меньшей мере одного основного двигателя. Максимальные периоды действия на каждом аварийном режиме являются суммируемыми. Центр управления обычно содержит средства хранения переданных данных, соединенные с центральным блоком цифровой обработки данных, а также средства передачи управляющих сигналов на двигатели и на установку GPP. Этот центральный блок обработки управляет и потребителями, и источниками энергии.
Например, на блок-схеме согласно фиг. 1 показан порядок аварийного регулирования «R», при этом каждый режим аварийного регулирования обозначен ниже как R1, R2 или R3, осуществляемого посредством аварийного сигнала «S», созданного функцией аварийного срабатывания в центральном блоке 100 цифровой обработки данных. Блок 100 согласно этому примеру встроен в центр управления, называемый органом 200 управления самолетом. Данные относятся к сведениям, формируемым в модулях контроля и отслеживания, называемых «FADEC» 300 и 400 (сокращенно от «Full Authority Digital Engine Control») основных двигателей M1 и M2 основных двигателей. FADEC оборудования представляет собой цифровой модуль, который может регулировать это оборудование по всему диапазону мощности. Сигнал «S» аварийного регулирования передается на установку GPP 700 через ее FADEC 800. FADEC 800 разрешает установке GPP при получении аварийного сигнала увеличивать мощность, обеспечиваемую установкой GPP. Пилот 900 также может подавать команды «С» на блок 100 обработки для изменения распределения отбора нетяговой мощности между основными двигателями M1 и М2, с одной стороны, и установкой GPP 700, с другой стороны, в зависимости от условий полета.
Более того, FADEC 300, 400 и 800 выполнены с возможностью передачи пилоту 900 и на модуль 950 обслуживания летательного аппарата через блок 100 обработки органа 200 управления самолетом сведений «I» о состоянии двигателей и установки GPP, и об их способности обеспечивать нетяговую мощность. Двунаправленные каналы «L» передачи данных соединяют различные указанные агрегаты.
Дополнительные мощности, которые могут быть обеспечены установкой GPP, представлены на графиках на фиг. 2-5, а именно:
- мощность PSU в режиме особой опасности, которая обеспечивает всю или часть общей нетяговой мощности PT, избегая или уменьшая таким образом разгрузку потребителей летательного аппарата, и одновременно являющуюся достаточной для осуществления попытки повторного запуска одного отказавшего основного двигателя;
- мощность PMU в режиме максимальной опасности, которая также обеспечивает всю или часть общей нетяговой мощности PT, избегая или уменьшая таким образом разгрузку потребителей летательного аппарата, но без попытки повторного запуска основного двигателя, и
- мощность PIU в режиме средней опасности, которая обеспечивает долю общей нетяговой мощности и которая может обеспечиваться вплоть до конца полета, например в условиях ETOPS.
Периоды работы при различных мощностях в аварийных режимах ограничены, для того чтобы соответствовать допустимым пределам повреждений установки GPP. Но эти периоды являются суммируемыми. Таким образом, если установку GPP приводят в действие только на уровне мощности в режиме средней опасности, время, которое должно быть затрачено на обеспечение более высокой мощности, суммируется с максимально допустимым временем в режиме средней опасности.
Согласно одному приведенному в качестве примера варианту осуществления мощность PSU достигает 130% от мощности номинальной работы, длящейся в течение xmax=1 минута, тогда как мощность PMU составляет приблизительно 120% от мощности номинальной работы, длящейся в течение ymax=2 минуты, а мощность PIU не превышает 110% от мощности номинальной работы, длящейся в течение zmax=180 минут. Эти максимальные периоды, во время которых непрерывно или поочередно могут приводиться в действие различные режимы, обусловлены размерами двигателей. Согласно одному приведенному в качестве примера варианту осуществления периоды распределены на 35 секунд для мощности PSU, 2 минуты 15 секунд для мощности PMU (неиспользуемые 25 секунд для мощности PSU используются дополнительно к мощностям PMU и/или PIU) и 110 минут для мощности PIU.
Использование этих дополнительных мощностей подробно описано ниже в зависимости от выбора, разгружать или не разгружать один или несколько «уцелевших» двигателей (которые продолжают работать) в соответствии с различными способами регулирования в режиме OEI. В частности, обратный отсчет времени, выделенного для каждого режима, осуществляется счетчиками 801 времени, встроенными в FADEC 800 установки GPP 700. Такой обратный отсчет позволяет предотвратить повреждение установки GPP, которая в противном случае была бы приведена в действие в течение увеличенных периодов в режимах предельных мощностей. Мощности, обеспечиваемые установкой GPP, кроме прочего, автоматически регулируются посредством FADEC в соответствии с энергетическими потребностями потребителей. Такая регулировка скрыта от пилота.
При выходе из строя по меньшей мере одного двигателя блок 200 обработки данных передает аварийный сигнал «S» на FADEC 800 установки GPP 700. Этот сигнал инициирует разрешение мгновенного использования для GPP режимов PJS, RM и RI, соответствующих обеспечению мощности PSU, PMU и PIU, соответственно. Режимы указаны на абсциссе в выделенном временном диапазоне в течение периодов, заданных в зависимости от потребления установки GPP 700, которые зависят от регулировки при распределении нетяговой мощности между установкой GPP и одним или несколькими работающими двигателями. Это распределения обеспечивается блоком 100 обработки в зависимости от приоритетов, заданных авиаконструктором, или в соответствии с командами пилота.
Приоритеты, заданные авиаконструктором, могут быть иерархично упорядочены, например, в соответствии со следующим критериями:
- абсолютный приоритет безопасности полета: еще не установленная требуемая траектория полета или опасное пространственное положение летательного аппарата обуславливают полную доступность тяговой мощности одного или нескольких продолжающих работу двигателей с превышением пределов времени использования аварийных режимов GPP, если безопасность полета находится под угрозой;
- приоритет, относящийся к защите оборудования: соблюдение пределов времени использования аварийных режимов GPP, если траектория полета снова соблюдается;
- приоритет, относящийся к потреблению: оптимизация потребления под конец полета, которая может приводить к отключению некоторых потребителей, которые считаются ненужными.
Перед выдачей аварийного сигнала «S» все двигатели работают, и нетяговые мощности находятся в номинальном режиме АЕО согласно номинальному режиму управления RA со следующим распределением:
- мощность 2PMA, обеспечиваемая основной силовой установкой, объединяющей двигатели M1 и М2, где PMA=150 кВт;
- мощность PGA, обеспечиваемая установкой GPP, превышающая мощность 2PMA, обеспечиваемую главной силовой установкой согласно приведенному в качестве примера варианту осуществления, например, PGA=500 кВт;
- общая нетяговая мощность PTA, обеспечиваемая двигателями и установкой GPP для совместного обеспечения энергетических потребностей (электрических и пневматических), эту мощность можно получить следующим образом: PTA=2РМА+PGA.
На фиг. 2-5, подробное описание которых приведено ниже, показаны распределения нетяговой мощности при аварийных режимах управления согласно различным способам. В приведенном ниже описании также используются ссылки на агрегаты, пилота, режимы регулирования, сигналы и каналы передачи данных, использованные на фиг. 1 и обозначенные теми же ссылочными позициями. Уместно также использовать фиг. 1 и описание при указании на них ссылок.
На фиг. 2 представлен график управления нетяговыми мощностями P при аварийном регулировании в соответствии со способом R1. Этот способ инициируется посредством выдачи сигнала «S» в момент времени t0 блоком 100 обработки центра 200 управления в случае отказа левого двигателя M1 и без попытки повторного запуска этого двигателя.
В соответствии с этим способом регулирования R1 режим средней опасности RI требуется непосредственно и постоянно до конца полета, при этом не используется ни мощность режима особой опасности PSU, ни режима максимальной опасности PMU, которые остаются потенциально доступными (показаны пунктирными линиями). Установка GPP 700 таким образом приводится в действие для обеспечения мощности PIU режима средней опасности, превышающей номинальную мощность PGA, но которая ниже мощности PMU режима максимальной опасности. В этом случае уцелевший двигатель М2 не разгружается по нетяговой мощности и продолжает обеспечивать нетяговую мощность PMA.
Промежуточная мощность PIU обеспечиваемая с момента времени t2, и нетяговая мощность PMA - обеспечиваемая с момента времени t1 исключительно правым двигателем М2, который продолжает работать, - представляют общую нетяговую мощность PT на данном этапе полета между получением аварийного сигнала «S» в FADEC установки GPP 700 и окончанием полета. Эта общая мощность PT по существу равна общей нетяговой мощности PTA в номинальном режиме RA. Уровень обеспечиваемой аварийной мощности PIU соответствует, таким образом, обеспечению доли общей нетяговой мощности, которую может непрерывно обеспечивать установка GPP 700 вплоть до конца полета в условиях ETOPS. Периода действия установки GPP 700 в режиме RI объединяет возможные периоды действия режимов особой опасности RS (хщах) и максимальной опасности RM (ymax) на уровне средней мощности PIU, а также период (zmax), выделенный для режима средней опасности RI.
На фиг. 3 показан график управления нетяговыми мощностями P при аварийном регулировании в соответствии со способом R2. Этот способ инициируется посредством выдачи аварийного сигнала «S» в момент времени t0 блоком обработки центра 200 управления в случае отказа левого двигателя M1, как в предыдущем случае, при этом приводят в действие попытку повторного запуска этого двигателя.
Перед выдачей аварийного сигнала «S» в момент времени остановки левого двигателя M1 нетяговые мощности распределяются в номинальном режиме RA в режиме AEO в соответствии с той же конфигурацией, что и в случае для фиг. 2.
В соответствии с этим способом регулирования R2 правый двигатель М2, который продолжает работать, разгружают по нетяговой мощности - полная разгрузка с момента времени t3 - для временного получения большей тяговой мощности. Центр 200 управления самолетом выдает команду разгрузки в соответствии со способом аварийного регулирования R2 посредством функции аварийного срабатывания. Эта функция обеспечивается процессором, программируемым и встроенным в блок обработки центра управления самолетом.
В более широком смысле эта функция автоматически генерирует аварийные сигналы и управляет распределением нетяговой мощности между GPP и одним или несколькими работающими двигателями либо автоматически в соответствии с приоритетным выбором, заложенным изначально авиаконструктором и внедренным в функцию аварийного срабатывания, как в примере, описанном выше, либо при вмешательстве пилота.
Когда FADEC установки GPP получает аварийный сигнал «S», продолжающий работать двигатель М2 разгружается и установка GPP обеспечивает компенсирующую нетяговую мощность следующим образом. Вначале функция аварийного срабатывания устанавливает FADEC установки GPP в состояние готовности для увеличения пределов функционирования GPP, для того чтобы она могла выдерживать предстоящее увеличение нагрузки. Затем блок 100 обработки переключает средства передачи мощности двигателя М2 на установку GPP в соответствии с командами пилота или в соответствии с автоматическими программируемыми законами. В момент времени t3 нагрузка, выдерживаемая установкой GPP, резко возрастает. В ответ на такое приращение нагрузки газогенератор установки GPP ускоряется. Таким образом, установка GPP обеспечивает больше нетяговой энергии, чем на предыдущем этапе. Таким образом, газогенератор установки GPP ускоряется до достижения в момент времени t4 уровня мощности PMU режима максимальной опасности RM. Этот уровень мощности способен компенсировать снижение обеспечения двигателем М2 нетяговой мощности и отказ двигателя M1. При таких условиях вся нетяговая мощность PT обеспечивается установкой GPP, начиная с момента времени t3, уровень PG которой, в данном случае PMU между моментами времени t4 и t5, поддерживается по существу на номинальном уровне PTA, начиная с момента времени t4.
После периода времени y1, отведенного для работы в этом режиме максимальной опасности RM (период, который при необходимости можно уменьшить или исключить), например, равного 10 секунд, пилот в момент времени t5 выдает команду на осуществления попытки повторного запуска основного левого двигателя M1 в блок обработки центра управления. Центр 200 управления запрашивает у FADEC 800 установки GPP 700 переход в режим запуска двигателя M1. Установка GPP еще больше ускоряет свой газогенератор для обеспечения мощности режима особой опасности PSU, содержащей мощность, необходимую для повторного запуска. Таким образом, установка GPP почти мгновенно достигает режима особой опасности RS, при котором установка обеспечивает всю нетяговую мощность на номинальном уровне PTA, увеличенную на мощность повторного запуска левого двигателя M1.
На графике согласно фиг. 3 показан случай, когда отказавший двигатель M1 удалось повторно запустить в результате указанной попытки. После использования всей мощности, необходимой для повторного запуска, во время периода x1, равного 35 секунд, установка GPP 700 переходит в момент времени t6 в режим максимальной опасности RM, соответствующий мощности PMU. Этот режим может длиться вплоть до завершения оставшейся части y2 (равного разности (y-y1)) максимального периода «y» (2 минуты), выделенного для этого режима, увеличенного на остаток времени (x-x1), допустимого, но не использованного в режиме особой опасности RS (максимальный период «x», равный 1 минуте). Таким образом, режим максимальной опасности RM может длиться в течение ((y+x)-(y1+x1)), что составляет в этом примере 2 минуты 15 секунд.
Однако, если в соответствии с условиями необходимо, чтобы в момент времени t7 основные двигатели M1 и М2 могли снова обеспечивать часть нетяговой мощности 2PMA в режиме AEO, функция аварийного срабатывания либо автоматически, либо по запросу пилота заново распределяет обеспечение нетяговой мощности между основными двигателями и установкой GPP. Эта установка GPP в момент времени t7 переходит в номинальный режим RA обеспечения мощности, и мощность, обеспечиваемая этой установкой, уменьшается до уровня PGA.
На графике согласно фиг. 4 показан аварийный случай, изображенный на фиг. 3, но с неудавшейся попыткой повторного запуска отказавшего двигателя M1. Ссылочные позиции, приведенные на фиг. 4. указывают на элементы, описанные со ссылкой на фиг. 3. Альтернативно согласно фиг. 4 уцелевший двигатель М2 возобновляет обеспечение нетяговой номинальной мощности РМА, если пилот считает, что, начиная с момента времени t8, условия полета это позволяют. Установка GPP одновременно переходит в момент времени t8 в режим средней опасности RI обеспечения мощности PIU, соответствующей уровню мощности, которую установка GPP сможет обеспечивать вплоть до конца полета.
На фиг. 4 также показан график управления нетяговыми мощностями Р при аварийном регулировании в соответствии со способом R3, соответствующим одновременному отказу двух двигателей M1 и М2. FADEC установки GPP принимает аварийный сигнал «S», созданные функцией аварийного срабатывания и выданный в момент времени t0 блоком обработки центра управления.
В этом случае вся нетяговая мощность обеспечивается установкой GPP, как и в предыдущем случае. После получения аварийного сигнала «S» вся потребляемая нетяговая мощность PT генерируется установкой GPP за счет ускорения ее газогенератора до достижения уровня режима максимальной опасности RM обеспечения мощности PMU. Установка GPP таким образом позволяет компенсировать отказ двигателей M1 и М2. При таких условиях вся нетяговая мощность PT обеспечивается мощностью PG установки GPP, начиная с момента времени t3, на уровне, по существу равном уровню номинальной PTA.
После периода функционирования в этом режиме максимальной опасности RM, который можно уменьшить или даже исключить, в случае если двигатель необходимо повторно запустить как можно скорее, пилот в момент времени t5 отправляет в центр управления команду на выполнение попытки повторного запуска одного двигателя, например двигателя М2. Блок обработки этого центра запрашивает у FADEC установки GPP переход в режим запуска двигателя М2. Установка GPP еще больше ускоряет газогенератор для обеспечения мощности особой опасности PSU, содержащей мощность, необходимую для повторного запуска, и мощность для обеспечения всей нетяговой мощности на номинальном уровне PTA. Таким образом, происходит управление двумя ситуациями в зависимости от того, был ли повторно запущен двигатель М2 или нет.
На графике согласно фиг. 4 показан случай, когда отказавший двигатель М2 удалось повторно запустить в результате указанной попытки. После использования всей мощности, необходимой для повторного запуска, установка GPP, начиная с момента времени t6, переходит в режим максимальной опасности RM, соответствующий мощности PMU, поскольку двигатель М2 не обеспечивает нетяговую мощность.
Если условия полета позволяют, пилот принимает решение в момент времени t7 больше не разгружать двигатель М2. Функция аварийного срабатывания центра 200 управления самолетом позволяет двигателю М2 снова обеспечивать часть нетяговой мощности PMA. Установка GPP одновременно замедляет газогенератор в этот момент времени t7 в режиме средней опасности RI мощности PIU, таким образом что общая нетяговая мощность PT сохраняет по существу номинальный уровень PTA.
Мощность PIU обеспечивает долю нетяговой мощности, которую установка GPP может обеспечивать вплоть до конца полета. Эта мощность PIU остается выше номинального уровня мощности PGA, Для того чтобы компенсировать нетяговую мощность, которую отказавший двигатель M1 не обеспечивает.
График согласно фиг. 5 аналогичен графику согласно фиг. 4, но соответствует альтернативному случаю, когда отказавший двигатель М2 повторно не запускается, при этом оба двигателя остаются в состоянии отказа. В этом случае после завершения режима особой опасности RS установка GPP возвращается в режим RM максимальной мощности PMU, начиная с момента времени t6, и остается в этом режиме RM вплоть до завершения периода, выделенного для этого режима. Затем в момент времени t9 функция аварийного срабатывания снижает потребление нетяговой мощности установкой GPP, которая в этот момент времени переходит в режим средней опасности RI обеспечения мощности PIU, снижая соответственно обеспечение нетяговой мощности.
Блок обработки учитывает сведения о достижении пределов периодов - x, y и z - режимов RS, RM и RI. Эти сведения передаются посредством FADEC установки GPP, и функция аварийного срабатывания центра 200 управления самолетом снижает таким образом потребление мощности установки GPP в соответствующие моменты времени- в данном случае в момент времени t9 - например в соответствии с приоритетами, описанными выше, переключаясь в эти моменты времени из одного режима в другой.
Для увеличения обеспечения нетяговой мощности летательный аппарат оснащен турбиной с приводом от набегающего потока воздуха типа RAT. Речь идет о небольшой турбине или «маленькой ветровой турбине», соединенной с гидравлическим насосом или электрогенератором.
Настоящее изобретение не ограничено описанными и представленными примерами. Например, оно может предусматривать другие варианты, которые объединяют, например, полностью или частично режимы регулирования R1-R3, описанные выше. Кроме того, другие режимы увеличения мощности, обеспечиваемые установкой GPP, могут быть определены, например, путем обеспечения нескольких промежуточных уровней мощности.
Группа изобретений относится к способу и системе регулирования мощности в случае отказа двигателя летательного аппарата. Для регулирования мощности при отказе по меньшей мере одного двигателя летательного аппарата увеличивают пределы работы основной силовой установки типа двигателя (GPP) в соответствии с тремя аварийными режимами, расположенными последовательно в порядке уменьшения уровня мощности. При этом при режиме особой опасности обеспечивают прирост мощности для попытки запуска отказавшего двигателя, при режиме максимальной опасности обеспечивают всю или часть нетяговой мощности, при режиме средней опасности обеспечивают минимальную долю нетяговой мощности до конца полета. В случае превышения максимальных периодов действия, выделенных для каждого аварийного режима, функция аварийного срабатывания распределяет отбор нетяговой мощности между двигателями и GPP автоматически или в соответствии с командой пилота. Система регулирования мощности содержит центр управления полетом с блоком обработки данных, модуль обслуживания, модули контроля и отслеживания (FADEC) двигателей и GPP, соединенных определенным образом двунаправленными каналами передачи данных. Обеспечивается регулирование мощности в случае отказа по меньшей мере одного двигателя летательного аппарата. 2 н. и 8 з.п. ф-лы, 5 ил.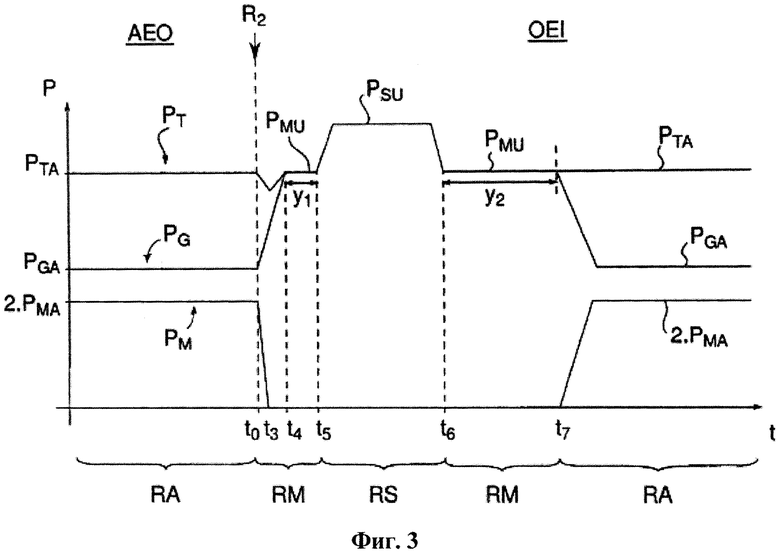
1. Способ регулирования мощности в случае отказа по меньшей мере одного двигателя (M1, М2) летательного аппарата, содержащего центральный блок (100) цифровой обработки данных, обеспечивающий функцию аварийного срабатывания для создания аварийного сигнала (S), отличающийся тем, что способ предусматривает применение основной силовой установки типа двигателя, называемой GPP (700), управляемой посредством функции управления и отслеживания и работающей в непрерывном режиме в полете, при этом обеспечивающей часть (PGA) общей номинальной нетяговой мощности (РТА) летательного аппарата, увеличение пределов ее работы для почти мгновенного обеспечения, при получении аварийного сигнала (S), увеличения нетяговых мощностей (PSU, PMU, PIU), увеличиваемых в соответствии с по меньшей мере тремя аварийными режимами (RS, RM, RI) в случае указанного отказа двигателя в ответ на дополнительное потребление, осуществляемое с GPP (700), при этом каждый аварийный режим имеет максимальное время действия, переходящее из одного режима в другой и распределяемое на несколько чередующихся последовательностей, при этом эти режимы, распределенные в порядке уменьшения уровня мощности, предусматривают, по меньшей мере, супераварийный режим (RS), при котором обеспечивают всю или часть нетяговой мощности, увеличенной на прирост мощности для осуществления попытки повторного запуска отказавшего двигателя (M1, М2), максимальный аварийный режим (RM), при котором обеспечивают всю или часть нетяговой мощности, и промежуточный аварийный режим (RI), при котором обеспечивают минимальную долю нетяговой мощности, соответствующую остаточной располагаемой мощности в непрерывном режиме вплоть до конца полета, при этом функция управления и отслеживания GPP (700) отсчитывает время, затрачиваемое на каждый аварийный режим (RS, RM, RI), оповещая центральный блок (100) обработки в сочетании с выдачей аварийного сообщения в случае превышения максимальных периодов действия (xmax, ymax, zmax), выделенных для каждого аварийного режима (RS, RM, RI), при этом функция аварийного срабатывания распределяет отбор нетяговой мощности летательного аппарата между основными двигателями (M1, М2) и установкой GPP (700) либо автоматически, либо в соответствии с командой пилота в зависимости от сведений о затраченном времени на режим и предупреждении о превышении предела эксплуатации аварийного режима.
2. Способ по п. 1, отличающийся тем, что супераварийный режим (RS) достигают только на этапе попытки повторного запуска одного двигателя (M1, М2) при одновременном обеспечении всей или части нетяговой мощности летательного аппарата, максимальный аварийный режим (RM) достигают в случае отказа одного или нескольких двигателей (M1, М2) при одновременном обеспечении всей или части нетяговой мощности летательного аппарата, и промежуточный аварийный режим (RI) действует только на этапе поддержания доли общей нетяговой мощности (РТ) в случае окончательного отказа по меньшей мере одного двигателя (М1, М2) во время завершающего периода полета с разгрузкой, по максимуму, двигателя или двигателей, продолжающих работать.
3. Способ по п. 1, отличающийся тем, что в случае отказа одного (M1) из двигателей (M1, М2) летательного аппарата, обеспечивающих нетяговую мощность во время их работы, один режим регулирования (R1) предусматривает приведение в действие только промежуточного аварийного режима (RI) установки GPP (700) с целью компенсировать отсутствие вклада отказавшего двигателя (М1), при этом один или несколько работающий(их) двигатель(ей) (М2) не разгружен(ы) от своего вклада в общую нетяговую мощность (РТА).
4. Способ по п. 1, отличающийся тем, что в случае отказа одного (M1) из двигателей (M1, М2) летательного аппарата, обеспечивающих нетяговую мощность во время их работы, один режим регулирования (R2) предусматривает приведение в действие трех режимов (RS, RM, RI) последовательно и поочередно с разгрузкой работающего(их) двигателя(ей) (М2) от его(их) вклада в нетяговую мощность, пока отказавший двигатель (M1) не удалось повторно запустить, а именно чередующуюся последовательность максимального аварийного режима (RM) с обеспечением по меньшей мере части нетяговой мощности (РТ), за которым следует потребление мощности, соответствующее супераварийному режиму (RS) при попытке повторного запуска отказавшего двигателя (M1) во время, максимум, всего установленного периода, выделенного для этого режима, перед возвращением в максимальный аварийный режим (RM) с полным обеспечением нетяговой мощности, причем этот последний режим может длиться вплоть до завершения установленного периода, выделенного для этого режима.
5. Способ по п. 4, отличающийся тем, что в случае повторного запуска отказавшего двигателя (M1) функция аварийного срабатывания распределяет нетяговую мощность между двумя двигателями (M1, М2) и установкой GPP (700), которые снова функционируют в номинальном режиме нетяговой мощности, установившемся вплоть до конца полета, при этом определенную часть (PGA) этой мощности обеспечивает установка GPP, а дополнительную часть (2РТА) обеспечивают два двигателя (M1, М2).
6. Способ по п. 4, отличающийся тем, что в случае неудавшегося повторного запуска отказавшего двигателя (M1) функция аварийного срабатывания прекращает разгрузку работающего двигателя (М2), возобновляя его вклад в нетяговую мощность (РМА), либо автоматически в зависимости от летных данных, либо в соответствии с командой пилота (900), если, по его мнению, условия полета это позволяют, и приводит в действие установку GPP в промежуточном аварийном режиме (RI) вплоть до конца полета.
7. Способ по п. 4, отличающийся тем, что в случае отказа двух двигателей (M1, М2) один режим регулирования (R3), осуществляемый функцией аварийного срабатывания, предусматривает приведение в действие чередующейся последовательности, обеспечивая действие максимального аварийного режима (RM), за которым следует супераварийный режим (RS) при попытке повторного запуска одного двигателя (М2), перед возвращением в максимальный аварийный режим (RM).
8. Способ по п. 7, отличающийся тем, что в случае повторного запуска двигателя (М2) функция аварийного срабатывания переориентирует, либо в соответствии с командой пилота (900), если, по его мнению, условия полета это позволяют, либо автоматически в зависимости от летных данных, часть потребителей к повторно запущенному двигателю (М2), который обеспечивает свою часть нетяговой мощности (РМА), а другую часть потребителей к установке GPP (700), которая работает в промежуточном аварийном режиме (RI) вплоть до конца полета.
9. Способ по п. 7, отличающийся тем, что если двигатель (М2) не удается повторно запустить в результате попытки, приводят в действие максимальный аварийный режим (RM) вплоть до завершения периода действия (ymax), затем потребление нетяговой мощности снижают посредством функции аварийного срабатывания для перехода в промежуточный аварийный режим (RI).
10. Система регулирования мощности в случае отказа по меньшей мере одного двигателя летательного аппарата (M1, М2), содержащая центр управления полетом, называемый органом (200) управления самолетом, оснащенный блоком (100) цифровой обработки данных, модуль (950) обслуживания летательного аппарата и модули контроля и отслеживания, называемые FADEC (800, 300, 400) установки GPP (700), и двигатели (M1, М2), отличающаяся тем, что FADEC (800) установки GPP (700) оснащен счетчиками (801) времени, затрачиваемого на аварийные режимы (RS, RM, RI), создаваемые функцией аварийного срабатывания блока (100) обработки, которая распределяет обеспечение нетяговых мощностей (PG, РМ) установкой GPP (700) и двигателями (M1, М2) посредством их FADEC (800, 300, 400), при этом двунаправленные каналы (L) передачи данных соединяют центр управления самолетом с FADEC (800, 300, 400) и эти FADEC с установкой GPP (700) и двигателями (M1, М2) для обеспечения возможности управления потреблением потребителей в зависимости от указанных затрачиваемых периодов времени и сведений (I) о состоянии двигателей (M1, М2) и установки GPP (700), передаваемых от FADEC (800, 300, 400) в модуль (950) обслуживания и пилоту (900) через блок (100) обработки, в частности, за счет осуществления способа по любому из предыдущих пунктов.
| US 4684081 A, 04.08.1987 | |||
| US 5235812 A, 17.08.1993 | |||
| US 6316841 B1, 13.11.2001 | |||
| КРЕПЕЖНЫЙ ЭЛЕМЕНТ И КЛЮЧ ДЛЯ ЕГО ЗАВИНЧИВАНИЯ | 2007 |
|
RU2347956C2 |
| СИСТЕМА ЭНЕРГООБМЕНА ДЛЯ ПРЕОБРАЗОВАНИЯ РАЗЛИЧНЫХ ВИДОВ ЭНЕРГИИ | 1997 |
|
RU2141912C1 |

