Предлагаемое изобретение относится к технической области силовых установок однодвигательных винтокрылых летательных аппаратов. Изобретение касается способа помощи пилоту однодвигательного винтокрылого летательного аппарата на этапе полета в режиме авторотации. Изобретение относится также к однодвигательному винтокрылому летательному аппарату, содержащему устройство помощи пилоту этого летательного аппарата на этапе полета в режиме авторотации.
Винтокрылый летательный аппарат в классическом исполнении оборудован, по меньшей мере, одним несущим винтом для обеспечения подъемной силы, соответственно тяги, и, как правило, хвостовым винтом, чтобы противостоять, в частности, моменту рыскания, оказываемому несущим винтом на фюзеляж этого летательного аппарата, или чтобы обеспечить также контроль движений по рысканию этого летательного аппарата.
Для приведения во вращение несущий винт и хвостовой винт, летательный аппарат содержит силовую установку, которая может иметь один или несколько тепловых двигателей.
В частности, различают летательные аппараты однодвигательного типа, в которых силовая установка содержит один тепловой двигатель, который приводит в движение несущий винт и хвостовой винт, и летательные аппараты двухдвигательного типа, силовая установка которых имеет с этой целью два тепловых двигателя.
Следует заметить, что по всему тексту под «тепловым двигателем» понимаются газотурбинные двигатели или также все поршневые двигатели, которые могут быть использованы в такой силовой установке. Понятие «тепловой двигатель» противопоставляется понятию «электродвигатель», определяющему двигатели, приводимые электрической мощностью.
Однодвигательные летательные аппараты имеют немаловажные преимущества относительно летательных аппаратов, снабженных двумя тепловыми двигателями, по меньшей мере. В качестве примера можно привести умеренную стоимость, меньший объем операций по техобслуживанию, относительно небольшой расход топлива.
Тем не менее эти однодвигательные летательные аппараты имеют также недостатки.
В случае аварии этого единственного теплового двигателя силовая установка и, следовательно, однодвигательный летательный аппарат ухудшают свои летно-технические характеристики, что при отказе теплового двигателя может привести к неспособности привести в действие несущий винт и хвостовой винт, что угрожает создать опасную ситуацию, существенно увеличивая нагрузку на пилота летательного аппарата. Действительно, в случае этого отказа, когда несущий винт не приводится в действие силовой установкой, пилот сразу же должен перейти к этапу полета в режиме авторотации, затем осуществить вынужденную посадку с несущим винтом в режиме авторотации.
Этап полета в режиме авторотации соответствует особому этапу полета, когда летательный аппарат совершает полет на снижение не за счет двигательной мощности, а за счет довольно высокого темпа снижения. Темпом снижения называется потеря высоты летательным аппаратом в единицу времени, эта потеря высоты обычно выражена в футах в минуту. Например, темп снижения в режиме авторотации для однодвигательного летательного аппарата составляет порядка 1500 фут/мин.
В этом случае вращение несущего винта осуществляется потоком воздуха при отсутствии источника энергии, что позволяет летательному аппарату оставаться управляемым. Действительно, несущий винт, который теперь приводится в движение относительным ветром, остается центром устойчивой подъемной силы, которая, хотя и меньше веса летательного аппарата, остается достаточной для торможения снижения летательного аппарата и сохранения контроля летательного аппарата вплоть до посадки.
В свою очередь, пилот, которому приходится применить эту особую процедуру пилотирования, должен быть очень внимательным, чтобы, во-первых, вначале перейти на этап полета в режиме авторотации при возникновении этого отказа и, во-вторых, продолжить затем выполнение этого довольно сложного маневра вплоть до посадки. Более того, нагрузка на пилота увеличивается, чтобы благополучно управлять летательным аппаратом на этом этапе полета в режиме авторотации, вплоть до вынужденной посадки в подходящей зоне. Эта особая процедура требует большой точности и хорошо отработанной подготовки со стороны пилота летательного аппарата. Речь идет о сложности пилотирования летательных аппаратов, в частности, однодвигательных и об одной из основных причин ограничения области режимов полета и применения этого типа летательного аппарата.
В самом деле, область режимов полета и разрешенных полетов для однодвигательных летательных аппаратов ограничены сертификационными органами, которые выдают разрешения на полеты. Например, запрещены полеты однодвигательных летательных аппаратов над большими городами. В равной мере могут быть ограничены разрешенные грузоподъемности однодвигательных летательных аппаратов, таких как максимальная полетная масса, относительно их реальных грузоподъемностей.
Возможное решение, чтобы улучшить в этом плане летно-технические характеристики однодвигательных летательных аппаратов, состоит в использовании гибридной силовой установки.
По образцу автомобильной области «гибридная» силовая установка содержит, по меньшей мере, один тепловой двигатель и, по меньшей мере, один электродвигатель, при этом механическую мощность гибридной силовой установки может подавать либо лишь тепловой двигатель, либо лишь электродвигатель, либо оба двигателя вместе. Для частного случая однодвигательных летательных аппаратов гибридная силовая установка содержит один тепловой двигатель и, по меньшей мере, один электродвигатель.
Известен, например, документ FR 2952907, в котором описана гибридная силовая установка, работающая на однодвигательном летательном аппарате, который содержит один тепловой двигатель, но также первый электродвигатель, механически связанный с несущим винтом летательного аппарата, и второй электродвигатель, механически связанный с хвостовым винтом. Эта гибридная силовая установка также содержит комплект батарей для накапливания электрической энергии, необходимой для электропитания обоих электродвигателей.
Эти электродвигатели могут использоваться в виде дополнения или замены теплового двигателя для приведения в движение несущего и хвостового винтов. Более того, эти электродвигатели могут функционировать в режиме генератора для преобразования механической энергии в электрическую мощность, а также могут служить замедлителем винтов или теплового двигателя.
Известен также документ FR 2962404, в котором описана электрическая схема гибридной силовой установки винтокрылого летательного аппарата. Эта силовая установка содержит, по меньшей мере, один тепловой двигатель и, по меньшей мере, один электродвигатель, а также основную электросеть и вспомогательную электросеть. Основная электросеть отвечает за общее электропитание летательного аппарата, а вспомогательная электросеть работает на гибридную систему этой гибридной силовой установки.
Более того, в документе ЕР 2148066 описана гибридная силовая установка и способ управления такой силовой установкой. Эта силовая установка содержит, по меньшей мере, один газотурбинный двигатель и, по меньшей мере, один электродвигатель, которые вместе могут приводить один и тот же главный редуктор. Фактически мощность, поставляемая электродвигателем, дополняет мощность каждого газотурбинного двигателя.
Кроме того, в документе US 2009/0145998 описан винтокрылый летательный аппарат, снабженный первым источником двигательной мощности, образованным газовой турбиной, и вторым источником двигательной мощности, образованным одной или несколькими электрическими батареями, которые питают электродвигатель. Эти оба источника мощности позволяют приводить в движение одновременно или независимо друг от друга один или несколько винтов.
Наконец, в документе WO 2010/123601 описан летательный аппарат с вертикальным взлетом и посадкой, в котором один или несколько винтов приводятся в движение только несколькими электродвигателями. Этот летательный аппарат может содержать несколько средств накопления электрической энергии, таких как батареи топливных элементов.
С другой стороны, одним из основных минусов использования электродвигателей является накопление необходимой для их функционирования электрической энергии. Действительно, существует ряд решений накопления электрической энергии, такие как батареи, термоэлементы или суперконденсаторы, но все они имеют свои недостатки.
Например, батареи тяжелы или слишком тяжелы, если требуется накопить большое количество электрической энергии, суперконденсаторы, в свою очередь, могут поставить большой объем электрической энергии, но в пределах очень ограниченного времени. Более того, термоэлементы имеют одноразовое использование и ограниченный срок действия после активации.
Каким бы ни было средство накопления электрической энергии, количество располагаемой электрической энергии ограничено, даже если масса этого средства накопления электрической энергии может быть существенной.
Таким образом, выигрыш в рабочих характеристиках, который позволяет обеспечить использование одного или нескольких электродвигателей в рамках одной силовой установки летательного аппарата, наталкивается на многочисленные ограничения, связанные с накоплением электрической энергии. Необходимо, например, найти баланс между выигрышем в рабочих характеристиках гибридной силовой установки и увеличением массы из-за использования этих средств накопления электрической энергии, необходимой для функционирования одного или нескольких электродвигателей.
Таким образом, цель предлагаемого изобретения состоит в том, чтобы предложить способ помощи пилоту однодвигательного винтокрылого летательного аппарата на этапе полета в режиме авторотации вследствие отказа теплового двигателя этого летательного аппарата. Этот способ позволяет, таким образом, пилоту благополучно справиться с этим отказом, в частности, перейти на этап полета в режиме авторотации и осуществить вынужденную посадку с несущим винтом в режиме авторотации.
Согласно изобретению, способ помощи предназначен для однодвигательного летательного аппарата, содержащего гибридную силовую установку, снабженную одним тепловым двигателем, по меньшей мере, одной электрической машиной и главным редуктором. Этот летательный аппарат содержит также, по меньшей мере, одно средство накопления электрической энергии для питания электрической машины и, по меньшей мере, один несущий винт, приводимый в движение при полете с номинальной скоростью вращения этой гибридной силовой установкой.
Термин «скорость вращения» несущего винта обычно используется специалистом, чтобы обозначить частоту вращения несущего винта летательного аппарата. Эта скорость вращения несущего винта выражается в радианах в секунду (рад/с) или в оборотах в минуту (об/мин).
Более того, в ходе полета несущий винт летательного аппарата вращается с номинальной скоростью вращения, которая определена конструктором летательного аппарата, при этом все же возможно некоторое отклонение от этой номинальной скорости вращения.
В дальнейшем, с целью упрощения, термином «скорость вращения» несущего винта будет обозначаться мгновенная скорость вращения несущего винта, поскольку, как известно, в полете эта мгновенная скорость вращения равна номинальной скорости вращения.
Однако электрическая машина является по умолчанию реверсивным двигателем. Это означает, что она может работать в двигательном режиме, то есть таким образом, что электрическая машина преобразует электрическую мощность в механическую мощность, и работать в генераторном режиме, то есть таким образом, что электрическая машина преобразует механическую мощность в электрическую мощность. Кроме того, электрическая машина, например, может быть бесщеточным электродвигателем, в английском названии brushless.
Эта электрическая машина может быть установлена в различных положениях внутри гибридной силовой установки согласно документу FR 2952907. Например, она может быть связана с главным редуктором, с тепловым двигателем или непосредственно с несущим винтом летательного аппарата.
Этот способ отличается тем, что на этапе мониторинга во время полета измеряют параметр мониторинга летательного аппарата, чтобы обнаружить возможный отказ теплового двигателя. Когда отказ двигателя обнаружен, управляют электрической машиной для подачи вспомогательной мощности на несущий винт, что обеспечивает, таким образом, помощь пилоту летательного аппарата в безопасном осуществлении управления летательным аппаратом на этапе полета в режиме авторотации, являющегося результатом упомянутого отказа теплового двигателя.
При отказе теплового двигателя, что приводит к полной потери движительной функции несущего винта, однодвигательный летательный аппарат должен перейти под управлением своего пилота на этап полета в режиме авторотации, причем этот этап полета в режиме авторотации представляет собой этап снижения без мощности двигателя, причем летательный аппарат остается управляемым. Этот переход на этап полета в режиме авторотации должен быть осуществлен в очень короткий промежуток времени, порядка 1-2 секунд после обнаружения отказа теплового двигателя, и в соответствии с особой процедурой, направленной на удержание винта с заданной скоростью вращения. Без быстрых действий пилота летательного аппарата после отказа скорость вращения несущего винта летательного аппарата очень быстро уменьшается, вплоть до срыва несущего винта, то есть несущий винт больше не обеспечивает подъемную силу, и летательный аппарат падает без возможности управления вплоть до аварии.
Способ направлен, прежде всего, на то, чтобы помочь пилоту в осуществлении этого перехода к этапу полета в режиме авторотации за счет подачи вспомогательной мощности на несущий винт.
В момент отказа теплового двигателя несущий винт не приводится в движение тепловым двигателем, и мощность двигателя падает до нуля. Движительная мощность несущего винта может быть параметром мониторинга, характеризующим отказ теплового двигателя. В этой ситуации вращение несущего винта испытывает существенное замедление, и, следовательно, скорость вращения постепенно снижается. Теперь мастерство пилота состоит в том, чтобы избежать падения скорости вращения несущего винта и попытаться удержать скорость вращения несущего винта, которая позволила бы обеспечить минимальный темп снижения.
После обнаружения отказа согласно способу управляют электрической машиной в двигательном режиме функционирования, то есть таким образом, что электрическая машина может подавать вспомогательную механическую мощность несущему винту. Эта подача вспомогательной мощности позволяет теперь снизить замедление несущего винта. Падение скорости вращения несущего винта, таким образом, становится менее быстрым, что обеспечивает пилоту большую гибкость в маневре набрать скорость вращения несущего винта. Переход к этапу полета летательного аппарата в режиме авторотации теперь происходит быстрее и легче для пилота. Более того, подача вспомогательной мощности позволяет также увеличить имеющееся в распоряжении время для перехода на этап полета в режиме авторотации на несколько секунд, например, 1-2 секунды.
Другой критический момент, который следует за отказом теплового двигателя - это посадка летательного аппарата. Действительно, в состоянии авторотации несущего винта посадка также должна быть осуществлена в особом и сложном оперативном режиме со стороны пилотов, чтобы избежать, в частности, жесткого столкновения с землей. Точнее говоря, речь идет, в конечном итоге, об устойчивом в плане кабрирования снижении летательного аппарата, чтобы уменьшить скорость поступательного движения летательного аппарата и его скорость снижения, затем выровнять летательный аппарат в горизонтальной плоскости так, чтобы коснуться земли с по существу нулевыми углами крена и тангажа.
Способ направлен, таким образом, на оказание помощи пилоту в осуществлении этой посадки за счет подачи вспомогательной мощности на несущий винт.
Чтобы сбросить и затем остановить скорость снижения и скорость поступательного движения летательного аппарата, маневр выравнивания должен сопровождаться увеличением общего шага лопастей несущего винта со стороны пилота, что вместе с обеспечением очень краткосрочной подъемной силы приводит к очень быстрому падению скорости вращения несущего винта. В течение короткого мгновения выравнивания и установки общего шага необходимая для полета скорость падает и единственным источником энергии для несущего винта является его собственная кинетическая энергия вращения. Способ, следовательно, обнаруживает падение мощности несущего винта посредством уменьшения скорости вращения несущего винта и управляет затем электрической машиной в двигательном режиме функционирования, чтобы подать вспомогательную механическую мощность на несущий винт.
Эта подача вспомогательной мощности имеет целью увеличить количество располагаемой энергии на уровне несущего винта и, следовательно, количество располагаемой энергии для уменьшения скорости снижения и скорости поступательного движения летательного аппарата. Таким образом, пилот может иметь в своем распоряжении дополнительную энергию для посадки без жесткого удара о землю и ограничить скольжение летательного аппарата по земле. Действительно, пилот должен в первую очередь уменьшить скорость снижения летательного аппарата, чтобы осуществить посадку без удара, при этом скольжение летательного аппарата во время посадки вследствие ненулевой скорости поступательного движения менее критично.
Наконец, при снижении в режиме авторотации пилот может также затребовать подъемную силу для несущего винта, чтобы обеспечить управление летательным аппаратом, в частности, чтобы уклониться от препятствия или добраться до соответствующей посадочной площадки. Этот запрос подъемной силы на уровне несущего винта сопровождается также уменьшением располагаемой мощности для несущего винта и, следовательно, также его скорости вращения. Способ выявляет при этом уменьшение скорости вращения несущего винта и управляет электрической машиной в двигательном режиме функционирования, чтобы подать вспомогательную механическую мощность на несущий винт. Фактически эта вспомогательная механическая мощность, поданная на несущий винт, обеспечивает осуществление маневра, затребованного пилотом, и поддержание скорости вращения несущего винта с необходимом в режиме авторотации значением, что также позволяет уменьшить темп снижения летательного аппарата.
В свою очередь, когда летательный аппарата находится на земле и несущий винт вращается на малых оборотах, то есть скорость вращения меньше номинальной скорости, не следует запускать на земле способ согласно изобретению. Действительно, эта скорость вращения на малых оборотах может быть идентифицирована как снижение мощности несущего винта и, следовательно, как отказ теплового двигателя. Чтобы устранить эту возможность, представляет интерес использовать первую информацию, предоставляемую средством информации, имеющимся на летательном аппарате, которая указывает, что летательный аппарат взлетел, чтобы убедиться, что несущий винт достиг номинальной скорости вращения, и чтобы позволить выполнение способа, если необходимо. Эта первая информация может быть использована, таким образом, для активации способа согласно изобретению, причем средством информации служит, например, поворотная ручка, такая как ручка для регулирования мощности, которая имеется в известных случаях на летательном аппарате и активируется только в полете, или любое другое средство авионики этого летательного аппарата.
Более того, не следует запускать способ согласно изобретению во время конкретных этапов полета, заданных пилотом летательного аппарата и требующих высоких аэродинамических нагрузок. Действительно, когда пилот задает сильное увеличение общего шага лопастей несущего винта, может происходить падение скорости вращения несущего винта под воздействием этих аэродинамических нагрузок, прежде чем тепловой двигатель сможет восстановить номинальную скорость вращения несущего винта.
Чтобы избежать интерпретации этого временного падения скорости вращения несущего винта вследствие упомянутой задачи пилота как падение мощности несущего винта и, соответственно, запуска исполнения способа согласно изобретению, представляет интерес использовать также вторую информацию, которая указывает на это сильное требование общего шага со стороны пилота. Эта вторая информация может быть использована таким образом, чтобы дезактивировать способ согласно изобретению, и, например, может подаваться органом управления общего шага, когда он сильно востребован пилотом летательного аппарата.
Наоборот, когда способ согласно изобретению запущен, то есть обнаружен отказ двигателя, эта вторая информация не влияет на способ, и электрическая машина подает вспомогательную мощность на несущий винт в соответствии с маневрами, заданными пилотом.
Таким образом, способ согласно изобретению обеспечивает в случае отказа теплового двигателя однодвигательного летательного аппарата в полете помощь пилоту, чтобы перейти на этап полета в режиме авторотации, чтобы осуществить определенные маневры на этапе полета в режиме авторотации и чтобы осуществить посадку благодаря автоматической подачи вспомогательной мощности в соответствующие моменты, то есть когда это необходимо для пилотирования летательного аппарата.
Кроме того, подача вспомогательной мощности на несущий винт в случае отказа теплового двигателя летательного аппарата позволяет осуществить, с одной стороны, увеличение максимальной массы на взлете однодвигательного летательного аппарата и, с другой стороны, увеличение области режимов полета этого летательного аппарата.
Действительно, максимальная масса на взлете однодвигательного летательного аппарата может быть ограничена летно-техническими характеристиками этого летательного аппарата на этапе полета в режиме авторотации, в частности, для учета случая отказа двигателя на этапе взлета.
Таким образом, подача этой вспомогательной мощности, которая улучшает летно-технические характеристики этого летательного аппарата на этапе полета в режиме авторотации, может обеспечить также увеличение его максимальной взлетной массы.
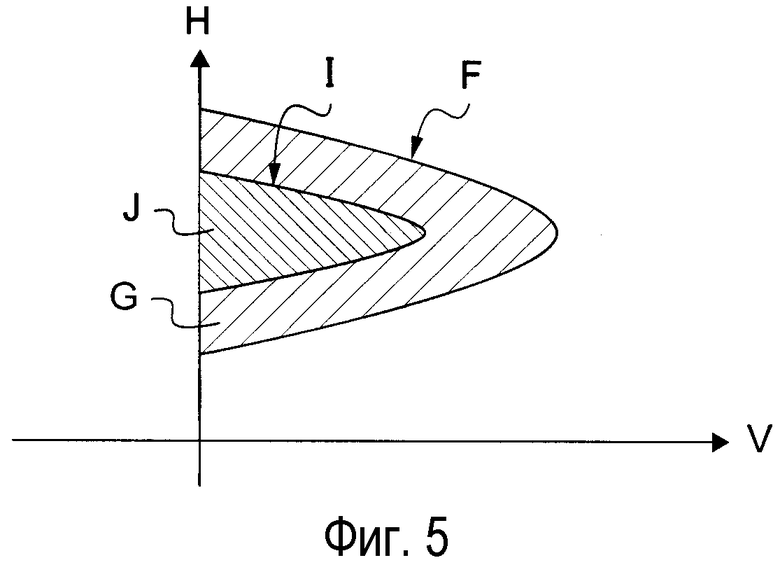
Более того, область режимов полета летательного аппарата характеризуется, среди прочего, так называемой «диаграммой высота-скорость», которая определяет минимальную горизонтальную скорость, которую должен соблюдать летательный аппарат в зависимости от его высоты относительно земли, и одну зону этой диаграммы, следует избегать, поскольку она исключает возможность осуществления этапа полета в режиме авторотации вплоть до безопасной посадки.
Высотой относительно земли называют положение летательного аппарата относительно земли по вертикальной оси. Этот термин «высота относительно земли» более адекватен, чем высота, фактически определяющая положение летательного аппарата по вертикальной оси, но относительно уровня моря. Таким образом, высота относительно земли определяет пространство, имеющееся между летательным аппаратом и землей, необходимое, например, для осуществления перехода на этап полета в режиме авторотации и посадки вследствие отказа теплового двигателя.
Следовательно, подача этой вспомогательной мощности, которая улучшает летно-технические характеристики этого летательного аппарата на этапе полета в режиме авторотации, позволяет уменьшить эту запретную зону диаграммы высота-скорость, увеличивая также область режимов полета летательного аппарата.
Область режимов полета летательного аппарата характеризуется также его темпом снижения на этапе полета в режиме авторотации. Этот темп снижения позволяет определить расстояние, которое может выполнить летательный аппарат на этапе полета в режиме авторотации. Таким образом, подача вспомогательной мощности на несущий винт может обеспечить уменьшение этого темпа снижения летательного аппарата. Следовательно, может быть увеличено расстояние, которое может выполнить летательный аппарат на этапе полета в режиме авторотации.
Таким образом, при условии, что область режимов полета однодвигательного летательного аппарата может быть расширена и этап полета в режиме авторотации является безопасным благодаря использованию способа согласно изобретению, могут быть уменьшены ограничения, связанные с этим однодвигательным летательным аппаратом. Например, может быть увеличена его максимальная полетная масса. В равной мере при условии, что может быть увеличено расстояние, которое может выполнить летательный аппарат на этапе полета в режиме авторотации, пилот летательного аппарата может с большей легкостью найти подходящую местность для посадки и, следовательно, получить разрешение на полеты над большими городами.
Увеличение области режимов полета непосредственно связано с продолжительностью подачи вспомогательной мощности на несущий винт. Для перехода на этап полета в режиме авторотации продолжительность использования вспомогательной мощности составляет порядка нескольких секунд, прежде чем будет установлен режим авторотации несущего винта. В равной мере для осуществления посадки в режиме авторотации продолжительность использования вспомогательной мощности составляет порядка нескольких секунд.
Таким образом, способ запускают, по меньшей мере, дважды, вследствие отказа теплового двигателя летательного аппарата вплоть до его посадки, в течение порядка 15 секунд для осуществления перехода на этап полета в режиме авторотации и посадки. Пилот летательного аппарата может также использовать часть располагаемой вспомогательной мощности, чтобы уклониться от препятствия или увеличить расстояние, проходимое на этапе полета в режиме авторотации.
Предпочтительным образом на средстве отображения летательного аппарата отображают, согласно способу изобретения, информацию относительно располагаемой вспомогательной мощности. Таким образом, пилот летательного аппарата постоянно осведомлен об уровне располагаемой вспомогательной мощности и может управлять этой располагаемой вспомогательной мощностью, чтобы, во-первых, сохранить вспомогательную мощность, необходимую для посадки, и, во-вторых, уклониться от препятствия или увеличить расстояние, которое он может выполнить на этапе полета в режиме авторотации, чтобы добраться до соответствующей посадочной площадки.
Этой информацией может быть, например, возможное время использования этой вспомогательной мощности на ее максимальном уровне, причем это время определяется в зависимости от имеющейся электроэнергии в средстве накопления для питания электрической машины.
Согласно способу, на средстве отображения отображают также индикацию о том, является ли способ оперативным. Способ является оперативным, когда он способен обнаружить отказ теплового двигателя и подать на несущий винт необходимую вспомогательную мощность.
Прежде всего, способ может быть оперативным лишь в полете, как это видно из вышесказанного. Далее имеющийся на летательном аппарате переключатель может позволить пилоту сделать способ оперативным или неоперативным. Этот способ также может не быть оперативным вследствие аварии или из-за отсутствия электроэнергии в средстве накопления. Индикация, информирующая, является ли способ оперативным, может быть цветом информации о располагаемой вспомогательной мощности, например, зеленого, когда способ оперативный, и красного, когда способ неоперативный. Таким образом, когда вся вспомогательная мощность израсходована, средство отображения отображает возможное время использования вспомогательной мощности «0 секунд» красным цветом.
Кроме того, располагаемая вспомогательная мощность зависит от количества располагаемой энергии в средстве накопления, имеющемся на летательном аппарате. Таким образом, чем большее средство накопления, тем больше располагаемой вспомогательной мощности и, следовательно, больше увеличивается область режимов полета. Более того, максимальная мощность, которую может подать электрическая машина, также оказывает влияние на увеличение области режимов полета.
С другой стороны, электрическая машина и средство накопления электроэнергии могут быстро и значительно достичь значительной массы, которая может быть пагубной для летно-технических характеристик летательного аппарата. Поэтому следует ограничить эти массы, чтобы создать компромисс между подачей этой вспомогательной мощности согласно способу изобретения и увеличением массы летательного аппарата.
Таким образом, максимальная вспомогательная мощность, необходимая для безопасного решения проблемы отказа теплового двигателя однодвигательного летательного аппарата, то есть максимальная мощность, которую может подать электрическая машина, составляет порядка 15-30% максимальной мощности теплового двигателя летательного аппарата.
Более того, эта вспомогательная мощность необходима на период порядка 15 секунд для обеспечения перехода на этап полета в режиме авторотации и безопасной посадки летательного аппарата. Фактически средство накопления может быть рассчитано таким образом, чтобы обеспечить подачу этой вспомогательной мощности на максимальной величине лишь в течение этого периода порядка 15 секунд, чтобы снизить до минимума его массу.
Средство накопления может включать в себя, по меньшей мере, суперконденсатор, то есть конденсатор, способный подать большую мощность в ограниченное время, термоэлемент, который для отдачи мощности требует приложения тепла, или батарею с подзарядкой.
Если средство накопления располагает электроэнергией, превышающей минимальную потребность для решения проблемы отказа теплового двигателя, то электрическая машина также может поставить вспомогательную мощность во время полета летательного аппарата, чтобы увеличить мощность силовой установки, за счет добавления этой вспомогательной мощности к мощности теплового двигателя. С этой целью пилот имеет в своем распоряжении специальный орган управления, такой как переключатель, для активации этой вспомогательной мощности и может использовать эту вспомогательную мощность на особых и напряженных этапах полета, таких как взлет с максимальной полетной массой или определенные маневры поворота с большими аэродинамическими нагрузками. Эта имеющаяся в наличии во время полета вспомогательная мощность также может увеличить область режимов полета однодвигательного летательного аппарата.
Кроме того, электрическая машина может быть использована в генераторном режиме для преобразования подаваемой тепловым двигателем или несущим винтом механической энергии в электрическую энергию.
Следовательно, так как средство накопления электроэнергии содержит, по меньшей мере, одно подзаряжаемое средство накопления этой электроэнергии, которое предназначено для питания электрической машины, когда она работает в двигательном режиме, электрическая машина в генераторном режиме подает электроэнергию для подзарядки каждого подзаряжаемого средства накопления.
Более того, по меньшей мере, одно подзаряжаемое средство накопления также может быть предусмотрено для общего электропитания летательного аппарата, в частности, перед запуском его теплового двигателя, для запуска теплового двигателя и в экстренном случае, когда основной электрогенератор на летательном аппарате не подает достаточно энергии для бортового электронного оборудования, что позволит, таким образом, продолжить полет в полной безопасности. Каждое подзаряжаемое средство накопления заменяет в этом случае, по меньшей мере, частично или полностью батареи, используемые традиционно для общего электропитания летательного аппарата, запитывая, в частности, приборы и электрическое оборудование летательного аппарата.
Таким образом, электрическая машина в генераторном режиме может снабжать электроэнергией, необходимой для работы электросети летательного аппарата, посредством, например, преобразователя напряжения, заменяя, по меньшей мере, частично или полностью, основной генератор или стартер-генератор, имеющийся, как правило, на летательном аппарате, причем стартер-генератор может быть ограничен простым стартером.
Предпочтительным образом увеличение массы благодаря электрической машине и средству накопления частично компенсируется удалением батарей и основного генератора, обычно находящихся на борту летательного аппарата.
В случае если средство накопления используется одновременно для электропитания электрической машины и в целом для электропитания летательного аппарата, вся располагаемая электроэнергии в этом средстве накопления не может быть использована для питания электрической машины. Действительно, при аварийном полете вследствие отказа теплового двигателя или отказа основного электрогенератора часть этой электрической энергии предназначена для снабжения питанием среди прочего бортовых приборов.
Действительно, часть располагаемой электроэнергии в этом средстве накопления выделена для электропитания этих бортовых приборов, а остаток располагаемой электроэнергии может подаваться на электрическую машину, чтобы снабдить вспомогательной мощностью несущий винт.
Кроме того, способ согласно изобретению должен незамедлительно обнаружить момент отказа теплового двигателя летательного аппарата, чтобы как можно раньше подать вспомогательную мощность на несущий винт.
Этот отказ характеризуется падением мощности несущего винта, который больше не приводится в движение тепловым двигателем и, следовательно, падением его скорости вращения. Можно, конечно, измерить скорость вращения несущего винта, чтобы оценить это падение его мощности, характеризующее отказ теплового двигателя, и обнаружить, таким образом, этот отказ, например, как только скорость вращения несущего винта достигает первого заданного значения, меньше номинальной скорости несущего винта.
Между тем, это падение скорости вращения несущего винта происходит вместе с сильным замедлением вращения несущего винта, которое может быть обнаружено, прежде чем эта скорость вращения достигнет первого заданного значения. Фактически в целях более быстрой ответной реакции отказ теплового двигателя может быть обнаружен в зависимости от замедления вращения несущего винта и скорости вращения.
Летательные аппараты обычно имеют первое средство измерения скорости вращения несущего винта. Таким образом, можно определить производную скорости вращения несущего винта, то есть замедление несущего винта, по простому и известному алгоритму.
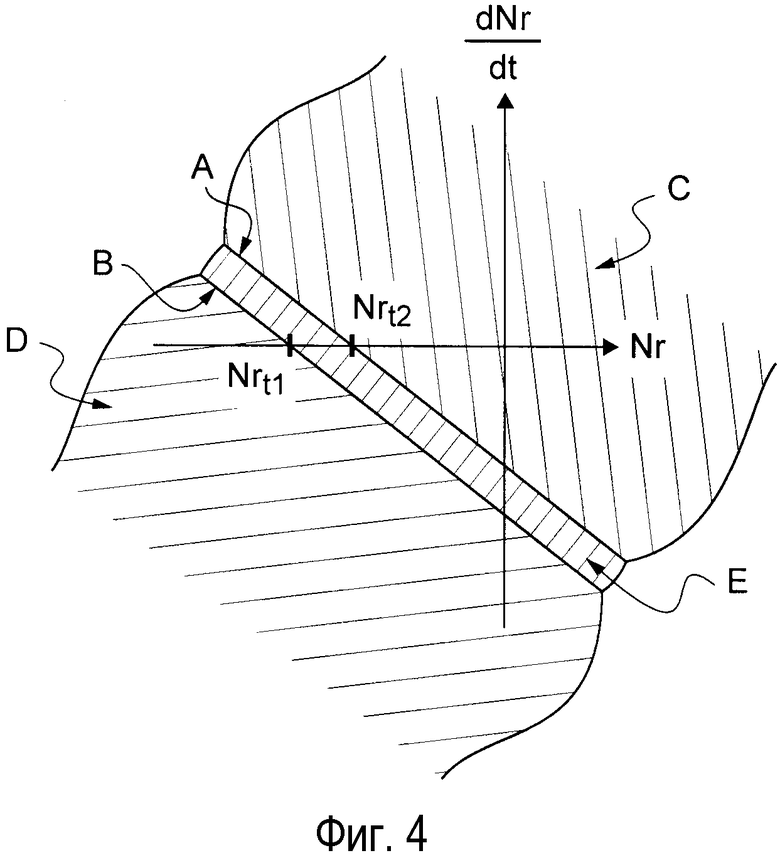
Согласно предпочтительной форме осуществления изобретения, считают, что тепловой двигатель отказал, когда первая контрольная мощность Wc является положительной, причем эта первая контрольная мощность Wc получена из следующего первого отношения:


Коэффициент Nrt1 меньше коэффициента Nrt2. Фактически разность (Nrt1-Nrt2) постоянно отрицательная.
Более того, Nrt2 соответствует первому заданному значению скорости вращения несущего винта, ниже которой обнаруживают отказ. Таким образом, как только скорость вращения Nr несущего винта становится меньше этого первого заданного значения Nrt2, разность (Nr-Nrt2) становится отрицательной. При отказе винт находится на стадии замедления, производная 
Фактически выражение 
Кроме того, с возникновением отказа несущий винт испытывает сильное замедление, и, следовательно, абсолютное значение производной 
Фактически выражение 
Вместе с тем, когда винт находится на стадии ускорения, например, после повторного запуска теплового двигателя или после подачи вспомогательной мощности электрической машиной, производная
Когда отказ обнаружен, электрическая машина подает вспомогательную мощность We, заключенную между нулевым значением и максимальной мощностью Wmax, которую может подавать эта электрическая машина. Вспомогательная мощность We фактически равна первой контрольной мощности Wc, когда первая контрольная мощность Wc меньше максимальной мощности Wmax, и вспомогательная мощность We равна максимальной мощности Wmax, когда первая контрольная мощность Wc больше или равна максимальной мощности Wmax.
Использование двух коэффициентов Nrt1 и Nrt2 позволяет, таким образом, иметь постепенное увеличение вспомогательной мощности We, исключая, следовательно, резкий переход от нулевого значения к максимальному значению вспомогательной мощности, который мог бы случиться при использовании только коэффициента Nrt2.
Таким образом, электрическая машина должна поставлять вспомогательную мощность We на несущий винт с момента обнаружения отказа и когда пилот это затребует после обнаружения отказа и вплоть до посадки летательного аппарата, так что вспомогательная мощность We непрерывно подается на несущий винт вслед за отказом теплового двигателя, чтобы перейти на этап полета в режиме авторотации, посадки летательного аппарата, а также чтобы уклониться от препятствия или увеличить расстояние, которое может выполнить летательный аппарат. Касательно перехода на этап полета в режиме авторотации, сильное замедление вращения несущего винта в момент отказа лежит по существу в основании подачи вспомогательной мощности на несущий винт. В других случаях понижение скорости вращения несущего винта, при котором замедление более слабое, лежит в основе подачи вспомогательной мощности We.
Кроме того, вследствие подачи вспомогательной мощности We скорость вращения несущего винта увеличивается, и первая контрольная мощность Wc может быть отрицательной. В этом случае вспомогательная мощность We, подаваемая на несущий винт, является нулевой, при этом несущий винт набирает достаточную скорость вращения, чтобы больше не нуждаться во вспомогательной мощности We.
Следует напомнить, что несущий винт летательного аппарата в полете имеет номинальную скорость вращения, заданную конструктором летательного аппарата. Коэффициент Nrt1 находится в интервале между 82% и 88% номинальной скорости вращения, тогда как коэффициент Nrt2 находится в интервале между 93% и 98% номинальной скорости вращения, а коэффициент k может изменяться от 1 до 6.
Согласно одному варианту предпочтительной формы осуществления способа, отказ теплового двигателя обнаруживают только в зависимости от скорости вращения несущего винта. В этом случае первую контрольную мощность Wc всегда получают из первого отношения, при этом весовой коэффициент k имеет нулевое значение. Обратная связь этого обнаружения отказа, следовательно, запаздывает, однако ее надежность может быть улучшена, при этом вовсе не требуется расчет производной.
Согласно другому варианту предпочтительной формы осуществления способа, тепловой двигатель летательного аппарата представляет собой газотурбинный двигатель, мгновенную скорость вращения турбины компрессора которого получают посредством второго средства измерения летательного аппарата. В этом газотурбинном двигателе турбина компрессора, которая позволяет сжимать поступающий воздух, механически не связана со свободной турбиной, которая приводит во вращение несущий винт посредством главного редуктора. Фактически турбина компрессора механически не связана с несущим винтом. Фактически при отказе газотурбинного двигателя мгновенная скорость вращения турбины компрессора падает быстрее, чем мгновенная скорость вращения несущего винта. Следовательно, отказ газотурбинного двигателя обнаруживают быстрее путем использования замедления этой турбины компрессора вместо замедления вращения несущего винта.
Таким образом, считают, что тепловой двигатель отказал, когда вторая контрольная мощность WCT является положительной, при этом вторая контрольная мощность WCT получена из следующего второго отношения:
 где Wmax - максимальная мощность, которую может подавать электрическая машина, NG - мгновенная скорость вращения турбины компрессора,
где Wmax - максимальная мощность, которую может подавать электрическая машина, NG - мгновенная скорость вращения турбины компрессора, 
Как для предпочтительной формы осуществления изобретения, вторая контрольная мощность WCT является положительной, главным образом при сильном замедлении турбины компрессора или когда ее скорость меньше коэффициента NGt2.
Таким образом, когда отказ обнаружен, электрическая машина подает вспомогательную мощность We, заключенную между нулевым значением и максимальной мощностью Wmax. Как и прежде, вспомогательная мощность We фактически равна второй контрольной мощности WCT, когда вторая контрольная мощность WCT меньше максимальной мощности Wmax, и вспомогательная мощность We равна максимальной мощности Wmax, когда эта вторая контрольная мощность WCT больше или равна максимальной мощности Wmax.
С другой стороны, управляют электрической машиной на подачу вспомогательной мощности We, равной второй контрольной мощности WCT, чем в первые моменты отказа, чтобы помочь пилоту перейти на этап полета в режиме авторотации. В действительности скорость турбины компрессора лишь снижается вследствие отказа, и переход на этап полета в режиме авторотации никак не сказывается на ней. В других случаях, в которых вспомогательная мощность We электрической машины может быть полезна, то есть при посадке летательного аппарата в режиме авторотации и уклонении от препятствия или увеличении расстояния, которое может выполнить летательный аппарат, управляют электрической машиной на подачу вспомогательной мощности We, равной первой контрольной мощности Wc.
Кроме того, параметром мониторинга летательного аппарата, который позволяет обнаружить отказ теплового двигателя, может быть также крутящий момент на выходе теплового двигателя, полученный посредством третьего средства измерения, такого как моментомер. В действительности при отказе теплового двигателя двигательная мощность этого теплового двигателя быстро падает, равно как и его крутящий момент. Фактически отказ теплового двигателя обнаруживают с момента, когда его крутящий момент меньше третьего заданного значения. Вслед за этим управляют электрической машиной на подачу вспомогательной мощности We, равной первой контрольной мощности Wc.
В случае, когда тепловой двигатель летательного аппарата представлен газотурбинным двигателем, включающим в себя турбину компрессора, параметром мониторинга может быть также скорость этой турбины компрессора. Действительно, поскольку турбина компрессора механически не связана со свободной турбиной теплового двигателя, то ее мгновенная скорость вращения быстро падает с момента отказа, тогда как мгновенная скорость вращения главного редуктора, механически связанного со свободной турбиной этого двигателя и несущим винтом, падает не так быстро.
Фактически отказ теплового двигателя определяют с момента, когда мгновенная скорость вращения турбины компрессора меньше четвертого заданного значения. Мгновенную скорость вращения турбины компрессора получают посредством второго средства измерения. Тогда управляют электрической машиной на подачу вспомогательной мощности We, равной первой контрольной мощности Wc.
Предпочтительным образом каждое средство измерения, используемое для измерения параметра мониторинга, может предоставить информацию практически без помех и тщательно отобранную, чтобы позволить способу согласно изобретению запустить подачу вспомогательной мощности быстро. С этой целью каждое средство измерения предпочтительно независимо и выделено для этого способа. Помехи, поступающие среди прочего от самого средства измерения, системы передачи данных или также системы регистрации цифровых данных, в частности, в связи с электромагнитными возмущениями, могут быть отфильтрованы, и расчет производной может осуществляться по любому простому, надежному и скоростному алгоритму. Например, фильтр первого порядка и расчет производной по формуле Эйлера обеспечивает хорошее быстродействие по способу согласно изобретению.
В равной мере можно заранее предвидеть отказ теплового двигателя, чтобы подготовить электрическую машину для подачи вспомогательной мощности на несущий винт. Действительно, летательные аппараты традиционно содержат блок контроля, связанный с тепловым двигателем, который обычно обозначают акронимом EECU, то есть Electronic Engine Control Unit. Этот электронный блок контроля EECU контролирует работу теплового двигателя и выдает, в частности, характеристики работы теплового двигателя. На некоторых летательных аппаратах он заменен вычислителем двигателя, который обычно обозначен акронимом FADEC, то есть Full Authority Digital Engine Control. Этот вычислитель двигателя FADEC имеет более важные функции, чем электронный блок контроля EECU, и, таким образом, ограничивает участие пилота в управлении тепловым двигателем.
Рабочие параметры теплового двигателя включают в себя, например, температуры и давления жидкостей теплового двигателя.
Изменение этих рабочих характеристик теплового двигателя позволяет идентифицировать, что вскоре может произойти отказ теплового двигателя. Предпочтительно, согласно способу изобретения, эти рабочие характеристики используют, чтобы предвосхитить обнаружение отказа теплового двигателя, и соответственно подготавливают электрическую машину для подачи вспомогательной мощности на несущий винт.
Для подготовки электрической машины для подачи вспомогательной мощности предварительно может быть активировано средство накопления, например, в случае средства накопления в форме термоэлемента, который, прежде чем подать содержащуюся в нем электроэнергию, требует определенного времени активации.
Электрическую машину для подачи вспомогательной мощности можно также подготовить путем предварительного запуска электрической машины, например, в случае электрической машины, которая посредством колеса свободного хода связана с главным редуктором.
Более того, чтобы уменьшить потребность во вспомогательной мощности и, следовательно, в массе средства накопления, можно ограничить использование способа согласно изобретению на основе «высоты относительно земли» летательного аппарата. Действительно, начиная с определенной высоты относительно земли, полеты на висении являются крайне редкими, так что это способствует переходу на этап полета в режиме авторотации, при этом летательный аппарат имеет ненулевую скорость поступательного движения. Таким образом, способ может быть оперативным лишь ниже заданной «высоты относительно земли» летательного аппарата. Например, заданная «высота относительно земли» составляет 2000 м.
Предлагаемое изобретение относится также к винтокрылому летательному аппарату, содержащему устройство помощи пилоту этого летательного аппарата на этапе полета в режиме авторотации, который снабжен гибридной силовой установкой, снабженную одним тепловым двигателем, по меньшей мере, одной электрической машиной и главным редуктором. Это устройство содержит также, по меньшей мере, одно средство накопления электроэнергии и средство управления электрической машиной, снабженное памятью.
Однодвигательный летательный аппарат содержит также, по меньшей мере, один несущий винт, приводимый во вращение гибридной силовой установкой и вращающийся с номинальной скоростью вращения в полете.
Это устройство отличается тем, что летательный аппарат содержит средство мониторинга для мониторинга параметра мониторинга летательного аппарата, чтобы определить возможный отказ теплового двигателя, средство управления, связанное со средством мониторинга, и электрическую машину для осуществления вышеописанного способа.
Параметром мониторинга может быть, например, мощность несущего винта, которая падает при отказе теплового двигателя. Это падение мощности может быть оценено посредством скорости вращения несущего винта, а также по замедлению несущего винта.
Таким образом, средство мониторинга содержит первое средство измерения скорости вращения несущего винта, что позволяет оценить падение мощности этого несущего винта.
Более того, средство управления может содержать вычислительный блок и память. Вычислительный блок выполняет введенные в память команды, чтобы определить, существует ли отказ теплового двигателя, и затем, чтобы обеспечить подачу электрической машиной при необходимости вспомогательной мощности на несущий винт, оказывая, таким образом, помощь пилоту летательного аппарата на этапе полета в режиме авторотации, являющегося результатом упомянутого отказа, для управления летательным аппаратом.
С другой стороны, вспомогательная мощность используется только для помощи пилоту в случае отказа теплового двигателя. Максимальная мощность Wmax, которую может предложить электрическая машина, может быть ограниченной, что позволяет также ограничить ее массу и объем. Эта мощность составляет, например, 15-30% максимальной мощности теплового двигателя летательного аппарата.
Кроме того, если вспомогательная мощность применяется только для помощи пилоту в случае отказа теплового двигателя, то продолжительность использования электрической машины ограничена периодом порядка 15 секунд. Следовательно, количество имеющейся в средстве накопления электроэнергии также ограничено.
Фактически емкости для накопления электроэнергии этого средства накопления и, следовательно, их размеры также ограничены. Предпочтительным образом это позволяет ограничить массу этого средства накопления.
Это средство накопления может включать в себя, например, по меньшей мере, подзаряжаемую батарею, по меньшей мере, термоэлемент или, по меньшей мере, суперконденсатор.
С другой стороны, может представлять интерес увеличение количества электроэнергии в средстве накопления. Так пилот может использовать вспомогательную мощность вне рамок отказа теплового двигателя, чтобы увеличить мощность однодвигательного летательного аппарата. С этой целью пилот имеет в своем распоряжении специальный орган управления, такой как переключатель, для активации этой вспомогательной мощности и может использовать эту вспомогательную мощность на особых и напряженных этапах полета, таких как взлет с максимальной полетной массой или определенные маневры поворота с большими аэродинамическими нагрузками.
Для информирования пилота о располагаемой вспомогательной мощности, в частности, чтобы он мог сохранить достаточную вспомогательную мощность в случае отказа теплового двигателя, устройство согласно изобретению может отображать информацию на средстве отображения летательного аппарата. Это устройство может отображать также на средстве отображения индикацию, информирующую о том, является ли это устройство оперативным.
Например, в информации о располагаемой вспомогательной мощности указывается остающееся время использования этой вспомогательной мощности на ее максимальном значении Wmax, соответствующим фактически располагаемой электроэнергии в средстве накопления для питания электрической машины.
Согласно форме осуществления этого устройства, электрическая машина может работать в генераторном режиме, преобразуя механическую энергию несущего винта или теплового двигателя в электрическую энергию. Если средство накопления содержит, по меньшей мере, подзаряжаемое средство накопления электроэнергии, электрическая машина обеспечивает в этом случае подзарядку каждого подзаряжаемого средства накопления.
Устройство может содержать также средство отсечения электропитания между электрической машиной и средством накопления. Действительно, представляет интерес отсечь электрическую цепь, соединяющую эти компоненты, по соображениям безопасности, чтобы изолировать эти компоненты, например, чтобы предотвратить несвоевременную подачу мощности на главный редуктор или также, чтобы предохранить систему от перегрева, чтобы избежать любого риска возгорания.
Кроме того, электрическая машина может быть заменена, в целях подачи вспомогательной мощности, двигателем, который использует иной источник энергии, чем электричество. Например, электрическую машину заменяют пневматическим двигателем или пиротехническим двигателем. Однако эти типы двигателей не реверсивные.
Изобретение и его преимущества поясняются более детально в рамках нижеследующего описания с примерами осуществления, приведенными как иллюстративный материал, со ссылкой на прилагаемые чертежи, на которых показаны:
фиг. 1 - синоптическая схема способа согласно изобретению,
фиг. 2 - однодвигательный летательный аппарат, оборудованный устройством согласно изобретению,
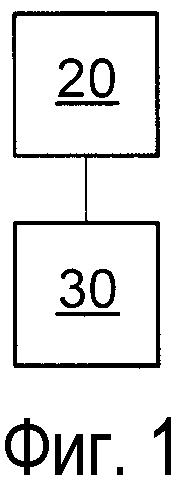
фиг. 3 - средство отображения такого устройства,
фиг. 4 - график, представляющий вспомогательную мощность, подаваемую этим устройством, и
фиг. 5 - график, представляющий область высота-скорость летательного аппарата.
Элементы, показанные на различных фигурах, обозначены одинаковыми позициями.
На фиг. 1 описывается способ помощи пилоту винтокрылого летательного аппарата 1 согласно изобретению на этапе полета в режиме авторотации. На фиг. 2 описывается винтокрылый летательный аппарат 1, оборудованный устройством 10 помощи пилоту этого летательного аппарата 1 согласно изобретению на этапе полета в режиме авторотации.
Способ и устройство 10 обеспечивают помощь пилоту в полете, при отказе теплового двигателя этого летательного аппарата 1, в частности, чтобы безопасно перейти на этап полета в режиме авторотации и осуществить посадку.
Такое устройство 10 согласно изобретению, показанное на фиг. 2, содержит гибридную силовую установку 5, снабженную единственным тепловым двигателем 13, электрическую машину 12, которая может подавать максимальную мощность Wmax, главный редуктор 11 и контрольный блок EECU 19, обеспечивающий рабочие характеристики теплового двигателя 13. Это устройство 10 включает в себя также средство накопления 14 электроэнергии и средство управления 15 электрической машиной 12, снабженное вычислительным блоком 17 и памятью 16.
Гибридная силовая установка 5 способна приводить во вращение несущий винт 2 летательного аппарата 1, который во время полета вращается с номинальной скоростью вращения NrN. Летательный аппарат 1 содержит также первое средство измерения 3 мгновенной скорости вращения Nr несущего винта 2 и средство отображения 18. В дальнейшем эта мгновенная скорость вращения Nr обозначается выражением «скорость вращения Nr».
Способ согласно изобретению состоит из двух этапов. Он содержит первый этап мониторинга 20, в ходе которого во время полета измеряют параметр мониторинга, чтобы определить отказ теплового двигателя 13. Затем, в ходе второго этапа 30, когда обнаружен отказ теплового двигателя 13, управляют электрической машиной 12 для подачи вспомогательной мощности We на несущий винт 2, что обеспечивает, таким образом, помощь пилоту летательного аппарата 1 на этапе полета в режиме авторотации, являющегося результатом этого отказа, для управления летательным аппаратом 1.
На этапе мониторинга 20 посредством первого средства измерения 3 может быть измерена скорость вращения Nr несущего винта 2. Действительно, при отказе теплового двигателя 13 эта скорость вращения Nr быстро падает.
На этапе мониторинга 20 можно определить также производную этой скорости вращения Nr, то есть замедление вращения несущего винта 2. Действительно, при отказе теплового двигателя 13 это падение скорости вращения Nr происходит с большим замедлением. Фактически это замедление может быть определено с момента отказа, при этом следует подождать, пока эта скорость вращения Nr не достигнет первого заданного значения, чтобы быть уверенным, что действительно речь идет об отказе.
Вычислительный блок 17 выполняет затем введенные в память 16 команды, чтобы определить, что имеет ли место отказ теплового двигателя 13. Таким образом, считают, что тепловой двигатель 13 отказал, когда контрольная мощность Wc является положительной, причем контрольную мощность Wc получают из следующего отношения:
В ходе этапа мониторинга 20 другие параметры мониторинга могут быть заменены вместо скорости вращения Nr несущего винта. Например, посредством моментомера 6 может быть измерен крутящий момент на выходе теплового двигателя, причем значение этого крутящего момента быстро падает при отказе теплового двигателя. В равной мере, когда тепловым двигателем летательного аппарата выступает газотурбинный двигатель, который содержит турбину компрессора, для обнаружения отказа газотурбинного двигателя может быть использована скорость этой турбины компрессора.
На этапе 30, после определения отказа теплового двигателя 13, вычислительный блок 17 выполняет введенные в память 16 команды для подачи электрической машиной 12 вспомогательной мощности We на несущий винт 2, обеспечивая, таким образом, помощь пилоту летательного аппарата 1 на этапе полета в режиме авторотации, являющегося результатом упомянутого отказа, для управления летательным аппаратом.
Эта вспомогательная мощность We заключена между нулевым значением и максимальной мощностью Wmax. Фактически она равна контрольной мощности Wc, когда эта контрольная мощность Wc меньше максимальной мощности Wmax, и вспомогательная мощность We также равна максимальной мощности Wmax, когда контрольная мощность Wc больше или равна максимальной мощности Wmax.
Электрическая машина 12 работает в этом случае в двигательном режиме, то есть преобразует электрическую мощность, накопленную в средстве накопления 14, во вспомогательную механическую мощность.
Кроме того, представленный на фиг. 2 летательный аппарат 1 содержит также средство информации 7, которое указывает, что летательный аппарат 1 взлетел. Действительно, когда летательный аппарат 1 находится на земле, несущий винт 2 вращается на малых оборотах, и эта скорость вращения на малых оборотах может быть идентифицирована как низкая мощность несущего винта 2 и, следовательно, как отказ теплового двигателя 13. Фактически способ согласно изобретению не может быть запущен, прежде чем средство информации 7 не укажет, что летательный аппарат взлетел. Например, средство информации 7 является поворотной ручкой, как ручкой регулирования мощности, активируемой лишь в полете.
На фиг. 4 представлена вспомогательная мощность, которую подает электрическая машина 12 в зависимости от скорости вращения Nr несущего винта 2 на абсциссе, а ее производная
Зона Е позволяет получить постепенное увеличение вспомогательной мощности, исключая, следовательно, резкий переход от нулевого значения к максимальному значению Wmax, если используется только коэффициент Nrt2 и, соответственно, только две зоны С и D.
Более того, вспомогательная мощность We, которую должна поставлять электрическая машина 12, используется для помощи пилоту для перехода на этап полета в режиме авторотации и посадки, при этом несущий винт 2 находится в авторотации. Эта электрическая машина не заменяет тепловой двигатель 13 для привода несущего винта 2. Максимальная мощность Wmax электрической машины 12 может быть, как известно, ограниченной. Она составляет, например, от 15 до 30% максимальной мощности, которую может поставлять тепловой двигатель 13.
Кроме того, подача вспомогательной мощности на несущий винт 2 при отказе теплового двигателя 13 может обеспечить, с одной стороны, увеличение максимальной массы на взлете однодвигательного летательного аппарата 1 и, с другой стороны, увеличение области режимов полета летательного аппарата 1.
Действительно, максимальная масса на взлете однодвигательного летательного аппарата может быть ограничена летно-техническими характеристиками летательного аппарата на этапе полета в режиме авторотации, в частности, для учета случая отказа двигателя на этапе взлета.
Таким образом, подача вспомогательной мощности, которая улучшает летно-технические характеристики летательного аппарата на этапе полета в режиме авторотации, может обеспечить увеличение его максимальной взлетной массы.
Более того, диаграмма высота-скорость летательного аппарата 1 может также изменяться вместе с возможным использованием вспомогательной мощности. Так, диаграмма высота-скорость F, показанная на фиг. 5, определяет минимальную горизонтальную скорость по абсциссе, которую должен соблюдать летательный аппарат 1 в зависимости от его высоты относительно земли по ординате. Зону G в диаграмме F необходимо избегать, так как этап полета в режиме авторотации в таком случае не может быть выполнен безопасно.
Следовательно, подача вспомогательной мощности, улучшающей летно-технические характеристики летательного аппарата 1 на этапе полета в режиме авторотации, обеспечивает достижение диаграммы высота-скорость I и уменьшает, таким образом, запретную зону J этой диаграммы высота-скорость, увеличивая вместе с тем область режимов полета летательного аппарата 1.
Кроме того, продолжительность использования электрической машины 12 для осуществления перехода на этап полета в режиме авторотации и посадки составляет порядка 15 секунд. Фактически размеры средства накопления 14 могут быть ограничены содержанием необходимого и достаточного количества электроэнергии. Следовательно, ограничена также масса этого средства накопления 14.
В свою очередь, может представлять интерес располагать вспомогательной мощностью также на этапе полета летательного аппарата 1, чтобы накопить мощность теплового двигателя 13 для осуществления, например, определенных маневров, таких как взлет с максимальной полетной массой, или определенных маневров поворота с большими аэродинамическими нагрузками.
С этой целью пилот может, например, управлять подачей вспомогательной мощности посредством соответствующего органа управления, такого как имеющегося на борту летательного аппарата 1 переключателя.
При этом пилот летательного аппарата 1 должен быть уверен, что в случае отказа теплового двигателя 13 он располагает вспомогательной мощностью We, достаточной, чтобы разрешить проблему отказа, так что электрическая машина 12 в течение, по меньшей мере, 15 секунд может подать на несущий винт 2 вспомогательную мощность We.
Средство отображения 18 летательного аппарата 1, показанное на фиг. 3, позволяет отображать информацию 21 о располагаемой в средстве накопления 14 вспомогательной мощности We. Эта информация 21 может, например, дополнять средство отображения 18, указывая на циферблате 23 скорость вращения Nr несущего винта 2. На средство отображения может выводиться также индикация 22, информирующая, является ли способ оперативным.
Например, информация 21 касается остающегося времени использования вспомогательной мощности We на максимальной мощности Wmax, а индикация 22, информирующая, является ли способ оперативным, может представлять собой цвет, отображающий эту информацию 21.
Средство накопления 14 может быть рассчитано по минимуму, чтобы обеспечить помощь пилоту при отказе теплового двигателя 13, однако оно может также обеспечить накопление большего количества электроэнергии. Более того, средство накопления 14 может быть подзаряжаемым или нет.
Например, средство накопления 14 содержит, по меньшей мере, подзаряжаемую батарею, термоэлемент или суперконденсатор.
Кроме того, электрическая машина 12 является реверсивной машиной и может работать как в двигательном режиме, так и в генераторном режиме. Таким образом, когда она работает в генераторном режиме, электрическая машина 12 может преобразовывать механическую энергию несущего винта 2 или теплового двигателя 13 в электрическую энергию.
Согласно форме осуществления изобретения, электрическая машина 12 может, в генераторном режиме, подавать электроэнергию для зарядки средства накопления, которое должно быть подзаряжаемым и служит для электропитания электрической машины 12, а также для электропитания летательного аппарата 1 в целом.
Предпочтительным образом средство накопления 14, служащее среди прочего для общего электропитания летательного аппарата 1, может обеспечить запуск теплового двигателя и общее электропитание летательного аппарата, когда основной электрогенератор летательного аппарата больше не подает достаточно энергии. Таким образом, средство накопления 14 может заменить батареи, используемые обычно для общего электропитания летательного аппарата 1, и электрическая машина 12 может заменить основной электрогенератор летательного аппарата 1.
Удаление батарей и основного электрогенератора может частично компенсировать увеличение массы благодаря электрической машине 12 и средству накопления 14.
В свою очередь, если средство накопления 14 содержит электроэнергию для питания, с одной стороны, электрической машины 12 и, с другой стороны, летательного аппарата, то весь объем этой электроэнергии не может быть использован для электрической машины 12. Действительно, при отказе теплового двигателя 13 или основного электрогенератора, бортовые приборы летательного аппарата 1 должны всегда получать питание. Фактически часть имеющейся в средстве накопления 14 электроэнергии резервируется для электропитания бортовых приборов, тогда как остаток располагаемой электроэнергии может подаваться на электрическую машину 12 для снабжения вспомогательной мощностью несущего винта 2. Фактически средство отображения 18 отображает в этом случае информацию 21, используя остаток располагаемой электроэнергии.
Согласно форме осуществления изобретения, можно предвосхитить появление отказа теплового двигателя 13, чтобы подготовить электрическую машину 12 для подачи вспомогательной мощности на несущий винт 2. Таким образом, вспомогательная мощность может быть подана как можно раньше, с момента обнаружения отказа.
Действительно, полученные посредством контрольного блока EECU 19 рабочие характеристики теплового двигателя 13, такие как температура и давление жидкостей теплового двигателя 13 и, в частности, их изменения, могут быть использованы, чтобы упредить обнаружение отказа теплового двигателя 13.
Далее для подготовки электрической машины 12, предназначенной для подачи вспомогательной мощности, может быть предварительно активировано средство накопления 14, например, в том случае, когда этим средством накопления 14 является термоэлемент, которому необходимо некоторое время активации, прежде чем он сможет поставить содержащуюся в нем электроэнергию.
Электрическая машина 12, предназначенная для подачи вспомогательной мощности, может быть подготовлена также путем предварительного запуска этой электрической машины 12, например, в случае, когда она связана с главным редуктором 11 посредством свободного колеса. При этом требуется довести электрическую машину 12 до скорости вращения главного редуктора 11, прежде чем приступить к эффективной подаче вспомогательной мощности.
Разумеется, предлагаемое изобретение допускает многочисленные изменения в том, что касается его реализации. Несмотря на то, что выше описаны несколько форм осуществления, не представляется возможным определить в полном объеме все возможные формы. Совершенно очевидно, что описанное средство может быть заменено другим равноценным средством, не выходя за рамки предложенного изобретения.
Изобретение относится к области авиации, в частности к системам автоматического управления летательными аппаратами. Способ помощи пилоту однодвигательного винтокрылого летательного аппарата (1) на этапе полета в режиме авторотации включает мониторинг работы во время полета теплового двигателя (13), чтобы определить его отказ, в частности, через падение мощности на указанном несущем винте (2), и затем, когда определен отказ указанного теплового двигателя (13), управляют электрической машиной (12) на подачу вспомогательной мощности We на указанный несущий винт (2), чтобы помочь, таким образом, пилоту указанного летательного аппарата (1) управлять указанным летательным аппаратом (1) на этапе полета в режиме авторотации вследствие указанного отказа. Летательный аппарат (1) содержит гибридную силовую установку, снабженную тепловым двигателем (13), электрической машиной (12) и главным редуктором (11), средство накопления (14) электроэнергии и несущий винт (2), механически связанный с указанной гибридной силовой установкой (5), устройство помощи пилоту (10), средство управления (15) электрической машиной, снабженное памятью (16). Достигается возможность перехода на этап полета в режиме авторотации и осуществления посадки при работе несущего винта в указанном режиме. 2 н. и 15 з.п. ф-лы, 5 ил.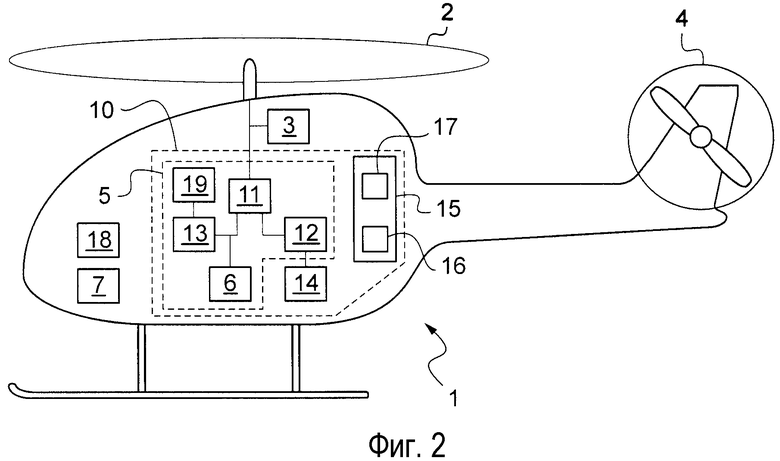
1. Способ помощи пилоту винтокрылого летательного аппарата (1) на этапе полета в режиме авторотации, при этом указанный летательный аппарат (1) содержит:
- гибридную силовую установку (5), снабженную одним тепловым двигателем (13), по меньшей мере, одной электрической машиной (12) и главным редуктором (11),
- по меньшей мере, одно средство накопления (14) электрической энергии, и
- по меньшей мере, один несущий винт (2), приводимый во вращение в полете на номинальную скорость вращения NrN указанной гибридной силовой установкой (5),
отличающийся тем, что
- на этапе мониторинга (20) во время полета измеряют параметр мониторинга указанного летательного аппарата (1), чтобы определить возможный отказ указанного теплового двигателя (13),
- после определения отказа теплового двигателя (13) управляют электрической машиной (12) для подачи вспомогательной мощности We на упомянутый несущий винт (2), обеспечивая, таким образом, помощь пилоту летательного аппарата (1) на указанном этапе полета в режиме авторотации, являющегося результатом упомянутого отказа, для управления упомянутым летательным аппаратом (1).
2. Способ по п. 1, отличающийся тем, что летательный аппарат располагает первым средством (3) измерения мгновенной скорости вращения Nr указанного несущего винта (2), на указанном этапе мониторинга (20) измеряют мгновенную скорость вращения Nr для оценки падения мощности указанного несущего винта (2), характеризующего упомянутый отказ указанного теплового двигателя (13).
3. Способ по п. 2, отличающийся тем, что определяют производную 
4. Способ по п. 3, отличающийся тем, что считают, что указанный тепловой двигатель отказал, когда контрольная мощность Wc является положительной, причем указанную контрольную мощность Wc получают из следующего первого отношения:
5. Способ по п. 4, отличающийся тем, что указанный коэффициент Nrt1 заключен между 82,5% и 88% номинальной скорости вращения NrN, а упомянутый коэффициент Nrt2 заключен между 93% и 98,5% номинальной скорости вращения NrN.
6. Способ по п. 1, отличающийся тем, что поскольку указанный тепловой двигатель (13) представляет собой газотурбинный двигатель, который располагает вторым средством измерения мгновенной скорости вращения NG турбины компрессора указанного газотурбинного двигателя, то считают, что указанный тепловой двигатель (13) отказал, когда контрольная мощность Wc является положительной, при этом контрольная мощность WC получена из следующего второго отношения:
 где Wmax - максимальная мощность, которую может подавать указанная электрическая машина (12), NG - указанная мгновенная скорость вращения указанной турбины компрессора,
где Wmax - максимальная мощность, которую может подавать указанная электрическая машина (12), NG - указанная мгновенная скорость вращения указанной турбины компрессора,
7. Способ по п. 1, отличающийся тем, что летательный аппарат располагает третьим средством (6) измерения, измеряющим крутящий момент на выходе упомянутого теплового двигателя (13), на указанном этапе мониторинга (20) измеряют указанный крутящий момент для оценки падения мощности указанного теплового двигателя (13), характеризующего упомянутый отказ указанного теплового двигателя (13).
8. Способ по любому из пп. 4-7, отличающийся тем, что указанная вспомогательная мощность We равна указанной контрольной мощности Wc, когда эта указанная контрольная мощность Wc меньше указанной максимальной мощности Wmax, и указанная вспомогательная мощность We равна указанной максимальной мощности Wmax, когда указанная контрольная мощность Wc больше или равна указанной максимальной мощности Wmax.
9. Способ по любому из пп. 1-7, отличающийся тем, что указанный летательный аппарат (1) располагает средством отображения (18), на этом средстве отображения (18) отображают информацию (21), относящуюся к упомянутой располагаемой вспомогательной мощности We, а также индикацию (22), информирующую о том, является ли указанный способ оперативным.
10. Способ по п. 9, отличающийся тем, что упомянутая информация (21) представляет собой остающееся время использования указанной вспомогательной мощности We на максимальной мощности Wmax, которую может подать указанная электрическая машина (12).
11. Способ по любому из пп. 1-7, отличающийся тем, что указанный способ является оперативным только во время полета указанного летательного аппарата (1), при этом средство информации (7) индицирует, что указанный летательный аппарат (1) взлетел.
12. Способ по любому из пп. 1-7, отличающийся тем, что указанный способ является оперативным только ниже заданной высоты относительно земли указанного летательного аппарата (1).
13. Винтокрылый летательный аппарат (1), который содержит:
- устройство помощи (10) пилоту указанного летательного аппарата (1) на этапе полета в режиме авторотации, снабженное:
гибридной силовой установкой (5), содержащей один тепловой двигатель (13), по меньшей мере, одну электрическую машину (12) и главный редуктор (11),
по меньшей мере, одним средством накопления (14) электроэнергии и
средством управления (15) указанной электрической машиной (12), снабженным памятью (16),
- по меньшей мере, один несущий винт (2), приводимый во вращение указанной гибридной силовой установкой (5) и вращающийся с мгновенной скоростью вращения Nr,
отличающийся тем, что указанный летательный аппарат (1) содержит средство мониторинга для мониторинга параметра мониторинга указанного летательного аппарата (1), чтобы обнаружить возможный отказ теплового двигателя (13), при этом указанное средство управления (15) связано с указанным средством мониторинга и указанной электрической машиной (12) для осуществления способа согласно пп. 1-7.
14. Летательный аппарат (1) по п. 13, отличающийся тем, что указанное средство мониторинга содержит средство измерения для оценки падения мощности указанного несущего винта (2).
15. Летательный аппарат (1) по п. 13, отличающийся тем, что указанное средство мониторинга содержит первое средство измерения (3) указанной мгновенной скорости Nr вращения для оценки падения мощности указанного несущего винта (2).
16. Летательный аппарат (1) по любому из пп. 13-15, отличающийся тем, что указанное средство управления содержит вычислительный блок и память, при этом указанный вычислительный блок выполняет введенные в указанную память команды, чтобы определить, существует ли отказ указанного теплового двигателя (13), затем чтобы обеспечить подачу электрической машиной (12), при необходимости, вспомогательной мощности We на несущий винт (2), оказывая, таким образом, помощь пилоту указанного летательного аппарата (1) на указанном этапе полета в режиме авторотации, являющегося результатом упомянутого отказа, для управления указанным летательным аппаратом (1).
17. Летательный аппарат (1) по любому из пп. 13-15, отличающийся тем, что указанный летательный аппарат (1) содержит средство отображения (18) для отображения информации (21), относящейся к упомянутой располагаемой вспомогательной мощности We, а также индикацию (22), информирующую о том, является ли указанное устройство (10) оперативным.
| НАКЛОННЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2327625C1 |
| WO 2011127389 A2, 13.10.2011 | |||
| СПОСОБ ПОЛЕТА ВЕРТОЛЕТА ПРИ ОТКАЗЕ СИЛОВОЙ УСТАНОВКИ С МЕХАНИЧЕСКИМ ПРИВОДОМ ВИНТОВ ( ВАРИАНТЫ) | 2006 |
|
RU2333866C2 |
| Устройство для измерения ускорений | 1956 |
|
SU110715A1 |
| RU 2009142440 A, 27.06.2011 | |||

