Область техники, к которой относится изобретение
Настоящее изобретение относится к летательному аппарату с вращающейся несущей поверхностью, оборудованному тремя двигателями, и к способу управления этим летательным аппаратом.
Необходимо отметить, что под двигателем следует понимать силовую установку, участвующую в создании тяги и/или подъемной силы летательного аппарата. На летательном аппарате, оборудованном вращающейся несущей поверхностью, «двигателем» называют силовую установку, приводящую во вращение главный редуктор, который приводит во вращение по меньшей мере один винт вращающейся несущей поверхности.
Иногда летательный аппарат оборудуют вспомогательной силовой установкой, известной под сокращением APU («auxiliary power unit» на английском языке). Эту вспомогательную силовую установку можно, например, использовать для генерирования электрической энергии, для приведения в действие гидравлических систем и даже для участия в запуске двигателя. Зато вспомогательная силовая установка не приводит в действие главный редуктор винта на летательном аппарате с вращающейся несущей поверхностью.
Следовательно, вспомогательная силовая установка летательного аппарата не представляет собой двигатель в рамках изобретения.
Это изобретение относится к области силовых установок летательных аппаратов с вращающейся несущей поверхностью, например, таких как вертолеты.
Уровень техники
Действительно, уровень мощности двигателя конструктивно ограничен. Поэтому, если мощности одного двигателя оказывается недостаточно, конструкторы, естественно, предусматривают на летательных аппаратах несколько двигателей.
Установка большего числа двигателей на самолетах представляет собой также возможность повышения безопасности этих самолетов. Кроме того, четырехмоторные самолеты представляют особый интерес для выполнения специфических задач, связанных с перелетами над океаном или со взлетом/посадкой на короткой полосе.
Вместе с тем, чтобы уменьшить сложность и стоимость осуществления, в настоящее время стремятся уменьшить число двигателей при выполнении одних и тех же задач.
Эта тенденция в равной степени касается и летательных аппаратов, оборудованных вращающейся несущей поверхностью.
Например, в 1960-е годы появились трехмоторные летательные аппараты по причине недостаточной мощности двигателей, существовавших в то время на летательных аппаратах большого тоннажа.
В этой категории трехмоторные летательные аппараты все еще представляют интерес для удовлетворения все возрастающих требований безопасности со стороны эксплуатантов. Эти требования предусматривают, в частности, обеспечение надежной траектории в любой момент, когда происходит отказ двигателя. В частности, некоторые эксплуатанты стремятся продолжать режим висения этих тяжелых летательных аппаратов с вращающейся несущей поверхностью, даже если один двигатель вышел из строя.
Трехмоторные летательные аппараты с вращающейся несущей поверхностью оборудованы тремя идентичными двигателями. Под «идентичными двигателями» следует понимать двигатели, имеющие идентичные характеристики приведения в действие вращающегося органа.
С другой стороны, «неодинаковыми двигателями» называют двигатели, имеющие разные приводные характеристики, то есть двигатели, развивающие разную максимальную мощность и/или разные максимальные крутящие моменты и/или разные максимальные скорости вращения выходного вала. Так, два неодинаковых двигателя могут соответствовать двигателю, вращающему выходной вал со скоростью в несколько десятков тысяч оборотов в минуту, и двигателю, вращающему выходной вал со скоростью менее десяти тысяч оборотов в минуту.
Установка нескольких идентичных двигателей потребовалась для обеспечения быстроты реакции в случае отказа одного двигателя, а также для упрощения установки и интегрирования двигателя. Вместе с тем, остается возможность установки двигателей с неодинаковыми значениями максимальной мощности, чтобы соблюдать требования безопасности и чтобы компенсировать недостаточность мощности существующих на рынке двигателей.
Однако необходимость решения технических проблем помешала внедрить в промышленность архитектуру трехмоторного вертолета, содержащего, например, по меньшей мере один двигатель с максимальной мощностью, отличной от максимальной мощности других двигателей.
Для разработки трехмоторного летательного аппарата с вращающейся несущей поверхностью, оборудованного идентичными двигателями, конструктор в основном должен преодолеть следующие технические проблемы.
Так, параметры двигателей должны быть предусмотрены с избыточностью, чтобы отвечать требованиям безопасности и обеспечивать прирост мощности в случае отказа одного двигателя. Были разработаны чрезвычайные режимы, известные под сокращением «OEI» («One Engine Inoperative»). Параметры для такой дополнительной мощности очень отрицательно сказываются и даже не совместимы с оптимизацией двигателя, в частности, с точки зрения массы, стоимости, расхода топлива и побочных явлений (шум, СО2 …). Кроме того, сертификация этих двигателей значительно усложняется, так как требует проведения дополнительных испытаний, таких как испытания на «превышение температуры» или на специфические характеристики выносливости.
Кроме того, во время эксплуатации двигатели необходимо регулировать.
Так, известны летательные аппараты, оборудованные только двигателями, регулируемыми в зависимости от постоянного заданного значения.
Альтернативно и согласно современным технологиям, многомоторный летательный аппарат содержит только двигатели, регулируемые относительно переменного заданного значения. Например, двигатели регулируют относительно заданного значения вращения свободной турбины, изменяющегося в зависимости от необходимой развиваемой мощности или от плотности воздуха.
При этом, как правило, двигатели взаимодействуют с блоком управления, известным под сокращениями ECU («engine control unit» на английском языке) или FADEC («Full authority digital engine control» или «Full authority digital electronic control» на английском языке).
Классически блок управления двигателем работает в согласовании с другими блоками управления. При этом регулирование двигателей осуществляют в зависимости от одинакового переменного заданного значения.
Заданное значение регулирования двигателей изменяют, в частности, чтобы избежать превышения скорости вращения вращающейся несущей поверхности или двигателя.
Действительно, мощность, необходимая на земле, меньше мощности, необходимой для взлета. Поэтому блоки управления ограничивают, например, характеристики двигателей, чтобы избегать превышения оборотов вращающейся несущей поверхности.
Во время режима висения, наоборот, следует избегать превышения оборотов двигателей.
По этой причине установка трех двигателей может потребовать наличия блоков управления, имеющих большие размеры и массы. По сравнению с двухмоторным летательным аппаратом число входов/выходов блока управления может быть намного больше и потребовать обеспечения согласования между оборудованием.
Кроме того, системы управления летательного аппарата и двигателей могут возбуждать собственные вибрационные моды летательного аппарата с вращающейся несущей поверхностью. Сложность обеспечения торсионной устойчивости кинематической цепи передачи мощности летательного аппарата увеличивается вместе с увеличением числа элементов, участвующих в общей кинематической цепи, и, следовательно, с увеличением числа установленных двигателей.
Поэтому ставится задача достижения хорошего компромисса между быстротой реакции двигателя на команду пилота и устойчивостью летательного аппарата. Действительно, если двигатели обладают очень быстрой реакцией, быстрая команда пилота может привести к возбуждению собственной вибрационной моды летательного аппарата. Поскольку разработка двухмоторного летательного аппарата является сложной, то понятно, что разработка летательного аппарата с тремя быстро реагирующими двигателями является еще более сложной.
Чтобы оптимизировать рабочую точку двигателей, можно предусмотреть установку двигателей с неодинаковой максимальной мощностью.
При двухмоторном варианте работы эта установка и ее преимущества описаны в документе WO 2012/059671A2.
Однако установка двигателей с неодинаковой максимальной мощностью связана с большими техническими проблемами. Поэтому такое решение представляется сложным в осуществлении на трехмоторном летательном аппарате.
В частности, может быть трудно оптимизировать быстроту реакции такого летательного аппарата.
Например, на обычном вертолете двигатели уравновешивают, чтобы значения мощности, развиваемой каждым двигателем, были идентичными.
Для двигателя с чистым пропорциональным регулированием уравновешивание этого двигателя по мощности («Load sharing» на английском языке) обеспечивают при помощи заранее определенного отношения, связывающего скорость вращения газогенератора двигателя и скорость вращения тягового и несущего винта. Для двигателя с пропорционально-интегральным регулированием, учитывающим параметры мощности (скорость вращения газогенератора NG, температура TOT или крутящий момент TRQ) других двигателей в контуре регулирования, уравновешивание по мощности производит блок управления.
Быстрота реакции летательного аппарата, оборудованного двигателями, развивающими одинаковую мощность, может быть лучше, чем у летательного аппарата, оборудованного двигателями, развивающими неодинаковую мощность.
Действительно, на летательном аппарате, оборудованном двумя двигателями, развивающими одинаковую мощность, каждый двигатель обеспечивает половину необходимой мощности. Если один двигатель выходит из строя, необходимо увеличить обороты другого двигателя, чтобы получить дополнительную мощность, равную половине необходимой мощности.
Если же двигатели имеют неодинаковую максимальную мощность, потерю наиболее мощного двигателя нужно компенсировать максимально быстро при помощи двигателя наименьшей мощности. Обороты этого двигателя наименьшей мощности необходимо увеличить с приращением мощности, превышающим половину необходимой мощности, учитывая неуравновешенность.
Кроме того, в таких условиях управление летательным аппаратом может оказаться сложным.
В случае обычного вертолета двигатели регулируют по одинаковой скорости вращения свободной турбины NTL, которая является переменной и пропорциональна скорости вращения NR несущего винта. Как было указано выше, их также регулируют таким образом, чтобы развивать идентичную мощность.
Если двигатели имеют неодинаковую максимальную мощность, представляется сложным разработать новую логику управления без равновесия мощности с целью управления общей производимой мощностью (мощность каждого из двигателей, ее ограничения, необходимая мощность и т.д.).
Кроме того, поскольку двигатели имеют неодинаковую максимальную мощность, их скорость вращения может быть разной, что создает другую трудность. Это управление мощностью может быть еще более сложным, если принимают решение об останове одного двигателя с целью оптимизации расхода топлива.
Устойчивость летательного аппарата становится более проблематичной в присутствии трех двигателей разной максимальной мощности.
Двигатели с разной максимальной мощностью могут характеризоваться разным динамическим поведением. Вместе с тем, блоки управления обмениваются данными, связанными с работой двигателей, и сравнивают эти данные. В результате этого неодинаковым двигателям могут быть сообщены асимметричные ускорения, что может привести к ложным тревожным сигналам переходных отказов.
Торсионная стабильность кинематической цепи передачи мощности летательного аппарата может тоже представлять собой трудно преодолимую проблему.
Кроме того, мониторинг двигателей может быть сложным в осуществлении, поскольку неодинаковые двигатели сложно сравнивать между собой.
Кроме того, конструктор летательного аппарата может обратиться к разным производителям двигателей для изготовления двигателей летательного аппарата, тем более если речь идет о неодинаковых двигателях.
Например, могут возникнуть трудности при согласовании интерфейсов между двигателями или же между двигателями и остальной частью летательного аппарата.
Поэтому понятно, что реализация трехмоторного летательного аппарата может представлять особый интерес.
С другой стороны, установка трех идентичных двигателей может вызвать трудности в определении параметров двигателей и блоков их управления, а также проблемы устойчивости.
Установка неодинаковых двигателей представляется еще более сложной и связана с проблемами быстроты реакции, управления, устойчивости, мониторинга и даже интегрирования.
Независимо от варианта реализация трехмоторного летательного аппарата связана с различными трудностями. Эти трудности делают реализацию трехмоторного летательного аппарата неочевидной, поскольку трехмоторный летательный аппарат не является простым двухмоторным летательным аппаратом, который оборудуют третьим двигателем.
Из предшествующего уровня техники известен документ US 4479619, в котором предложена система передачи мощности для трехмоторных вертолетов.
В этом решении предложен также альтернативный вариант отключения сцепления одного двигателя из трех.
Вертолет «Super-Frelon» тоже имеет три идентичных двигателя (без сцепления).
В документе US 3963372 предложено решение управления мощностью и контроля двигателей для трехмоторных вертолетов. Центральный блок управляет двигателями для выравнивания выходной мощности двигателей.
Чтобы преодолеть проблемы, связанные с двигателями с избыточными параметрами, в прошлом уже была рассмотрена установка двигателей с неодинаковой максимальной мощностью в случае двухмоторных летательных аппаратов. В частности, в документе WO2012/059671А1 были предложены два двигателя с неодинаковой максимальной мощностью.
В этом документе WO2012/059671А1 рассмотрен только случай двухмоторных летательных аппаратов и не предложено решений проблем управления или устойчивости.
В документе FR 2933910 описана силовая установки, содержащая по меньшей мере один газотурбинный двигатель и по меньшей мере один электрический двигатель.
В документе US 2009/186320 описаны три двигателя, управляемые органами (FADEC), связанными между собой и с органом управления, называемым «flight control computer FCC».
Сущность изобретения
Настоящее изобретение призвано предложить инновационный летательный аппарат с вращающейся несущей поверхностью, оборудованный тремя двигателями, чтобы, например, иметь возможность оставаться в режиме висения, даже если один двигатель вышел из строя.
Согласно изобретению, летательный аппарат оснащен вращательной несущей поверхностью и по меньшей мере одним главным редуктором для приведения во вращение этой вращающейся несущей поверхности. Кроме того, летательный аппарат содержит первый основной двигатель и второй основной двигатель, предназначенные для приведения в движение главного редуктора, при этом летательный аппарат оснащен основной системой регулирования, регулирующей первый основной двигатель и второй основной двигатель по переменному заданному значению.
Этот летательный аппарат дополнительно оснащен вспомогательным двигателем, приводящим в движение главный редуктор, причем этот летательный аппарат имеет вспомогательную систему регулирования, которая регулирует вспомогательный двигатель по постоянному заданному значению, при этом вспомогательная система регулирования является независимой от упомянутой основной системы регулирования.
Преимуществом изобретения по сравнению с двухмоторным летательным аппаратом является возможность получения дополнительной мощности. В случае отказа одного основного двигателя силовая установка все равно может развивать относительно большую мощность для продолжения безопасного полета этого летательного аппарата.
Когда один основной двигатель выходит из строя, при помощи изобретения можно, например, получить мощность, по существу эквивалентную мощности, получаемой на обычном двухмоторном летательном аппарате, работающем в рабочем режиме максимальной продолжительной мощности (РМС).
Кроме того, прирост мощности, выдаваемой вспомогательным двигателем, позволяет избежать избыточных параметров основных двигателей, в частности, чтобы осуществлять полет в режиме висения, даже если один основной двигатель выходит из строя.
В двухмоторном вертолете часто предусмотрены три чрезвычайных режима, известных под сокращениями OEI, OEI2′, OEI 30″, связанных с повышенными мощностями. Изобретение позволяет применять только один чрезвычайный режим и избежать, таким образом, нежелательных избыточных параметров.
Кроме того, этот инновационный летательный аппарат позволяет свести к минимуму некоторые из вышеупомянутых недостатков.
Действительно, двумя основными двигателями и вспомогательным двигателем управляют по-разному при любой фазе полета. Вспомогательный двигатель регулируют в соответствии с постоянной задачей в пределах области полета вертолета, независимо от плотности воздуха и при любой потребности необходимой мощности, передаваемой пилотом посредством маневрирования органов управления полетом.
Этот вспомогательный двигатель может быть электрическим или тепловым двигателем.
Таким образом, при отсутствии задачи переменного регулирования функцией вспомогательного двигателя является уменьшение необходимой мощности, которую должны развивать основные двигатели для обеспечения потребностей вращающейся несущей поверхности. Ниже будет показано, что вспомогательный двигатель выдает либо единый уровень мощности во время регулирования с фиксированной мощностью, либо по существу постоянную мощность во время регулирования, например, с фиксированным расходом топлива.
При этом основные двигатели обеспечивают необходимую дополнительную мощность для удовлетворения потребностей вращающейся несущей поверхности.
В случае необходимости регулирование основных двигателей осуществляют таким образом, чтобы они не производили никакой мощности. В частности, для этого основными двигателями управляют согласно задаче переменного регулирования.
Таким образом, эти два основных двигателя могут работать так же, как и двигатели классического двухмоторного летательного аппарата. При этом основная система регулирования может регулировать скорость вращения свободной турбины NTL этих основных двигателей в зависимости от переменного заданного значения, задаваемого электронной системой летательного аппарата.
Кроме того, основная система регулирования может регулировать один основной двигатель относительно другого основного двигателя. Например, основные двигатели могут быть сбалансированы таким образом, чтобы получить разницу не более 5% между скоростью вращения их газогенераторов и разницу не более 15% между крутящими моментами, передаваемыми этими основными двигателями.
С другой стороны, для упрощения устройства не предусмотрен обмен данными между вспомогательным двигателем и основными двигателями. Точно так же не обязательно происходит обмен данных состояния и рабочих параметров вспомогательного двигателя с данными состояния и рабочими параметрами основных двигателей.
Если основные двигатели и вспомогательный двигатель являются одинаковыми, летательный аппарат соответствует летательному аппарату с тремя одинаковыми двигателями, в котором могут возникать трудности, связанные с определением параметров двигателей и блоков их управления, а также проблемы устойчивости.
Вместе с тем, присутствие вспомогательного двигателя может позволить избежать избыточных параметров основных двигателей.
Кроме того, при отсутствии связи между основной системой регулирования и вспомогательной системой регулирования, как было указано выше, летательный аппарат может быть оборудован блоками управления, характеризующимися разумными размерами и стоимостью, аналогично двухмоторному летательному аппарату.
Например, согласно варианту выполнения, основная система регулирования содержит первый основной блок управления для управления первым основным двигателем и второй основной блок управления для управления вторым основным двигателем, при этом первый блок управления сообщается со вторым блоком управления. В этом случае вспомогательная система регулирования содержит вспомогательный блок управления для управления вспомогательным двигателем, при этом вспомогательный блок управления может быть лишен связи с основными блоками управления.
Основные блоки управления могут быть устройствами типа FADEC, применяемыми на двухмоторных вертолетах. Таким образом, число входов и выходов этих блоков управления остается ограниченным.
С другой стороны, вспомогательный блок управления может быть более простым, чтобы отвечать постоянной задаче регулирования. Например, вспомогательный блок управления может быть блоком гидромеханического типа.
Согласно другому варианту, основные и вспомогательный блоки управления все могут быть устройствами типа FADEC. В альтернативном варианте все основные и вспомогательный блоки управления могут быть гидромеханическими.
Что касается устойчивости летательного аппарата, вспомогательным двигателем управляют согласно фиксированной задаче, которая может ограничивать его влияние на торсионную стабильность кинематической цепи передачи мощности летательного аппарата.
Кроме того, вспомогательный двигатель может иметь время реагирования при ускорении или замедлении, превышающее время реагирования основных двигателей.
Действительно, вспомогательным двигателем управляют согласно постоянной задаче. Так, резкая команда пилота приводит к изменению поведения основных двигателей аналогично двухмоторному летательному аппарату, чтобы ответить на команду пилота или автоматического средства пилотирования.
Следовательно, как оказалось, вспомогательный двигатель может иметь низкую быстроту реакции. Быстрота реакции вспомогательного двигателя может быть значительно ниже быстроты реакции двух других двигателей. Разница в быстроте реакции между основным двигателем и вспомогательным двигателем может составлять около одной секунды.
Низкая быстрота реакции вспомогательного двигателя приводит к тому, что влияние вспомогательного двигателя на торсионную стабильность кинематической цепи передачи мощности оказывается ограниченным.
Кроме того, если вспомогательный двигатель имеет время реагирования при ускорении или замедлении, превышающее время реагирования основных двигателей, рабочий цикл вспомогательного двигателя можно адаптировать таким образом, чтобы минимизировать потребление энергии этим вспомогательным двигателем. В рамках теплового двигателя за счет этого можно снизить расход топлива вспомогательного двигателя.
Кроме того, основные и вспомогательный двигатели могут также быть неодинаковыми.
Например, основные двигатели являются идентичными, а вспомогательный двигатель отличается от основных двигателей.
В частности, вспомогательный двигатель может иметь другой размер и другой класс максимальной мощности, чем два основных двигателя. В частности, вспомогательный двигатель может развивать меньшую максимальную мощность, чем два основных двигателя.
При этом в летательном аппарате возникают дополнительные проблемы времени реагирования в случае отказа одного двигателя, проблемы мониторинга и даже интегрирования, которые были указаны выше.
Вместе с тем, два основных двигателя можно уравновесить при помощи основной системы регулирования. Поскольку вспомогательным двигателем управляют с постоянной задачей, время реагирования установки не меняется в зависимости от неисправного двигателя. Действительно, это время реагирования соответствует времени реагирования основного двигателя независимо от того, какой двигатель вышел из строя.
Что касается мониторинга двигателей, то не обязательно, чтобы происходил обмен данными состояния и рабочими параметрами вспомогательного двигателя с основными двигателями. Действительно, регулирование основных двигателей не зависит от вспомогательного двигателя и наоборот.
Следовательно, облегчается мониторинг силовой установки.
Наконец, основные двигатели и вспомогательный двигатель являются независимыми. Таким образом, разработку основных двигателей можно осуществлять независимо от разработки вспомогательного двигателя. Кроме того, необязательно согласовывать между собой интерфейсы трех двигателей, даже если вспомогательный двигатель имеет максимальную мощность, не равную максимальной мощности основных двигателей.
Кроме того, независимо от того, являются три двигателя одинаковыми или неодинаковыми, изобретение можно легко применить на двухмоторном летательном аппарате. Работа основных двигателей летательного аппарата двухмоторного типа остается почти неизменной, несмотря на добавление вспомогательного двигателя.
Кроме того, можно предложить выбирать вспомогательный двигатель из списка двигателей в зависимости от потребности. Действительно, поскольку регулирование основных двигателей не зависит от регулирования вспомогательного двигателя, выбор вспомогательного двигателя мало влияет на основные двигатели.
Этот летательный аппарат дает также возможность задавать работу вспомогательного двигателя в зависимости от полетного задания или от параметров, таких как поступательная скорость летательного аппарата.
Если вспомогательный двигатель запускают только на низкой поступательной скорости для повышения безопасности во время этой рабочей фазы, экономия топлива может быть существенной при оптимизированных характеристиках в режиме висения и в категории А.
В случае трехмоторного летательного аппарата преимуществом является оптимизированное определение параметров двух основных двигателей (при условиях работы только двухмоторного типа). Выигрыши в массе, простоте, стоимости, расходе топлива и в выбросе газов могут быть значительными.
Кроме того, если вспомогательный двигатель запускают только на низкой поступательной скорости, быстроту реакции вертолета можно оптимизировать в случае выхода из строя одного из основных двигателей. Действительно, изобретение позволяет применять один чрезвычайный режим, который можно достичь быстрее, чем некоторые чрезвычайные режимы в известных решениях.
Кроме того, в случае трехмоторного летательного аппарата с вспомогательным двигателем, имеющим максимальную мощность, не равную максимальной мощности основных двигателей, изобретение позволяет сообщать несущему винту достаточно энергии в случае отказа одного основного двигателя при осуществлении сложных и опасных маневров, таких как посадка.
Следовательно, летательный аппарат содержит два основных двигателя, управляемых по переменной задаче, и вспомогательный двигатель, управляемый по постоянной задаче в данном режиме работы.
Эта инновационная архитектура позволяет решить множество технических проблем, возникающих на некоторых трехмоторных летательных аппаратах.
Летательный аппарат может также иметь один или несколько следующих отличительных признаков.
В частности, между каждым двигателем и главным редуктором может быть установлено колесо свободного хода или сцепление.
Таким образом, вспомогательный двигатель связан механически с главным редуктором либо при помощи колеса свободного хода, которое позволяет прекратить вращение вспомогательного двигателя, когда этот вспомогательный двигатель не работает (например, в случае отказа двигателя), либо при помощи сцепления, позволяющего активировать механическую связь между вспомогательным двигателем и главным редуктором в необходимых конфигурациях.
При этом вспомогательный двигатель может быть связан с главным редуктором при помощи связи, включающей в себя колесо свободного хода или сцепление.
Эта связь может быть соединена с механической связью, соединяющей основной двигатель с главным редуктором, или с соответствующим входом главного редуктора.
Кроме того, если главный редуктор содержит несколько ступеней редукции скорости вращения, основные двигатели могут быть соединены с первой ступенью редукции, при этом вспомогательный двигатель соединен со второй ступенью редукции.
При этом каждый двигатель связан с главным редуктором в ступени редукции, соответствующей номинальному рабочему диапазону его выходного вала.
Кроме того, согласно варианту, каждый основной двигатель может иметь один чрезвычайный режим.
Вспомогательный двигатель может иметь по меньшей мере два рабочих режима, каждый из которых регулируют в зависимости от фиксированного постоянного заданного значения.
При этом вспомогательный двигатель регулируют относительно постоянной задачи, соответствующей применяемому режиму.
Например, вспомогательный двигатель может выдавать множество целевых мощностей, чтобы его можно было применять на разных летательных аппаратах одного типа или адаптировать к разным полетным заданиям одного летательного аппарата. В этом случае не обязательно определять параметры двигателей для наиболее сложного задания, которое к тому же выполняют реже всего.
Кроме того, постоянным заданным значением может быть либо фиксированное заданное значение мощности, либо фиксированное заданное значение расхода топлива. Например, тепловой вспомогательный двигатель можно регулировать по фиксированному заданному значению мощности или фиксированному заданному значению расхода топлива. Точно так же электрический вспомогательный двигатель можно регулировать, например, по фиксированному заданному значению мощности.
Согласно варианту, вспомогательный двигатель регулируют по постоянному целевому значению мощности в пределах области полета вертолета, независимо от плотности воздуха или от потребности необходимой мощности, создаваемой пилотом через движения органов управления полетом.
Согласно другому варианту, вспомогательный двигатель регулируют таким образом, чтобы достигать положения фиксированного максимального расхода топлива.
При этом мощность, выдаваемая вспомогательным двигателем, зависит от параметров, внешних по отношению к летательному аппарату, таких как давление и температура за бортом.
Положение фиксированного расхода топлива является эквивалентом «замораживания дозировки» в положении расхода, достаточного для получения мощности, необходимой для точки параметров летательного аппарата.
Недостатком этого варианта является переменная мощности, выдаваемая вспомогательным двигателем, при этом выдаваемая мощность меняется в зависимости от упомянутых параметров, внешних относительно летательного аппарата.
С другой стороны, контур регулирования вспомогательного двигателя является простым. Кроме того, этот вариант обеспечивает лучший контроль за расходом топлива.
Возможны и другие варианты. Например, вспомогательный двигатель можно регулировать таким образом, чтобы его выходной вал вращался по существу с постоянной скоростью вращения.
Согласно варианту, летательный аппарат содержит средство деактивации вспомогательного двигателя.
Средство деактивации может блокировать вспомогательный двигатель посредством его останова или перевода его работы в режим малого газа. Средство деактивации может иметь несколько положений, связанных с нормальной работой, с работой в режиме малого газа, с остановом вспомогательного двигателя или, например, с чрезвычайным режимом работы.
Этот вспомогательный двигатель можно активировать или деактивировать в зависимости от полетного задания (например, его активируют только для задания типа разведки), от характера местности (например, если местность не является открытой), от поступательной скорости вертолета (например, работа только на низкой скорости), от высоты полета (например, работа только на большой высоте) или от внешней температуры (например, работа только при высокой температуре).
Согласно первому предпочтительному варианту выполнения, вспомогательный двигатель развивает максимальную мощность, не достаточную для приведения к превышению оборотов упомянутой вращающейся несущей поверхности на земле.
Таким образом, отсутствует риск того, что вспомогательный двигатель приведет к превышению оборотов вращающейся несущей поверхности на земле.
Так, параметры вспомогательного двигателя можно предусмотреть таким образом, чтобы ограничить его максимальную мощность мощностью, меньшей противодействующего крутящего момента, действующего на выходной вал вспомогательного двигателя. Понятно, что этот противодействующий крутящий момент является результатом комбинации противодействующего крутящего момента вращающейся несущей поверхности и противодействующего крутящего момента главного редуктора, а также влияния сил инерции.
Согласно второму варианту выполнения, вспомогательный двигатель развивает максимальную мощность, достаточную для приведения к превышению оборотов вращающейся несущей поверхности.
При этом летательный аппарат может содержать средство обнаружения для обнаружения, находится ли летательный аппарат на земле, при этом упомянутый летательный аппарат имеет средство блокировки, блокирующее вспомогательный двигатель на земле.
Это средство обнаружения может, например, содержать радиовысотомер или контактор, установленный на шасси для обнаружения контакта шасси с землей.
Таким образом, вспомогательный двигатель на земле не работает, будучи остановленным или переведенным в режим малого газа, чтобы не привести вращающуюся несущую поверхность в состояние превышения оборотов.
С другой стороны, вспомогательный двигатель может быть активирован, когда летательный аппарат находится в полете, то есть больше не стоит на земле.
Во время фазы взлета вспомогательный двигатель можно активировать для приведения в действие механической цепи, когда летательный аппарат находится в зоне влияния земли. В этом случае процедура взлета может предусматривать промежуточную полетную точку проверки.
Если нарушение в работе происходит при взлете до активации вспомогательного двигателя, летательный аппарат может сесть относительно легко без помощи вспомогательного двигателя, когда летательный аппарат еще находится в зоне влияния земли. Это же относится и к посадке.
Кроме того, летательный аппарат может содержать систему обнаружения для того, чтобы обнаруживать, имеет ли летательный аппарат поступательную скорость, превышающую пороговую поступательную скорость, и/или превышает ли вращающаяся несущая поверхность пороговую скорость вращения, при этом упомянутый летательный аппарат имеет средство блокировки, блокирующее вспомогательный двигатель, если летательный аппарат имеет поступательную скорость, превышающую пороговую поступательную скорость, и/или если вращающаяся несущая поверхность превышает пороговую скорость вращения.
При этом система обнаружения может содержать обычные средства измерения поступательной скорости летательного аппарата.
Кроме того, система обнаружения может также содержать средства измерения скорости вращения вращающейся несущей поверхности. При их отсутствии система обнаружения может оценивать и/или упреждать мощность, необходимую для приведения в действие вращающейся несущей поверхности, причем эта необходимая мощность должна быть меньше фиксированной целевой мощности, выдаваемой вспомогательным двигателем для приведения в действие вращающейся несущей поверхности, чтобы эта вращающаяся несущая поверхность не развивала избыточной скорости вращения.
Таким образом, вспомогательный двигатель может работать в полете на низкой высоте и/или пока мощность, выдаваемая этим вспомогательным двигателем, меньше мощности, необходимой для приведения в действие вращающейся несущей поверхности.
Согласно версии первого и второго вариантов выполнения, средство блокировки содержит средство торможения вспомогательного двигателя.
Если вспомогательный двигатель имеет целевую постоянную максимальную мощность, которая может привести к превышению оборотов вращающейся несущей поверхности на земле или в полете, можно ввести переменный противодействующий крутящий момент. Этот переменный противодействующий крутящий момент активируют на земле, но в случае необходимости его можно ослабить, когда пилот увеличивает общий шаг лопастей несущего винта. Это средство торможения может содержать тормоз для торможения свободной турбины вспомогательного двигателя. Когда летательный аппарат больше не находится на земле, этот переменный противодействующий крутящий момент можно активировать, чтобы блокировать вспомогательный двигатель согласно логике системы обнаружения. Это позволяет определить, имеет ли летательный аппарат поступательную скорость, превышающую пороговую поступательную скорость, и/или когда вращающаяся несущая поверхность превышает пороговую скорость вращения, и/или во время оценки мощности, необходимой для вращающейся несущей поверхности, которая должна быть ниже фиксированной целевой мощности, выдаваемой вспомогательным двигателем.
Согласно версии второго варианта выполнения, если между вспомогательным двигателем и главным редуктором установлено колесо свободного хода, средство блокировки может содержать средство перевода в режим малого газа или останова упомянутого вспомогательного двигателя. Например, вспомогательный двигатель можно остановить или перевести в режим малого газа, когда мощность, необходимая для вращения приведения в действие вращающейся несущей поверхности, меньше мощности, выдаваемой вспомогательным двигателем.
Согласно этому варианту, колесо свободного хода не мешает приведению в действие вращающейся несущей поверхности вспомогательным двигателем. При этом вспомогательный двигатель останавливают или переводят в режим малого газа на земле, чтобы избежать превышения оборотов вращающейся несущей поверхности.
Согласно версии первого и второго вариантов выполнения, если между вспомогательным двигателем и главным редуктором установлено сцепление, упомянутое средство блокировки содержит средство отключения упомянутого сцепления.
При этом сцепление отключают на земле.
Кроме летательного аппарата объектом изобретения является также способ приведения во вращение главного редуктора, приводящего во вращение вращающуюся несущую поверхность летательного аппарата, при этом упомянутый летательный аппарат содержит первый основной двигатель и второй основной двигатель, приводящие в движение упомянутый главный редуктор, при этом упомянутый летательный аппарат оборудован основной системой регулирования, регулирующей первый основной двигатель и второй основной двигатель согласно переменному заданному значению.
На описанном выше летательном аппарате устанавливают вспомогательный двигатель, предназначенный для приведения в движение упомянутого главного редуктора, и вспомогательный двигатель регулируют по постоянному заданному значению при помощи вспомогательной системы регулирования, которая не зависит от упомянутой основной системы регулирования.
Этот способ может иметь также один или несколько следующих отличительных признаков.
Например, вспомогательный двигатель можно регулировать таким образом, чтобы быстрота реакции этого вспомогательного двигателя была ниже, чем у основных двигателей, то есть чтобы время реагирования этого вспомогательного двигателя было больше, чем время реагирования основных двигателей.
Кроме того, вспомогательный двигатель можно регулировать в зависимости от постоянного заданного значения, которым может быть либо фиксированное заданное значение мощности, либо фиксированное заданное значение расхода топлива.
Согласно первому варианту выполнения, если вспомогательный двигатель развивает максимальную мощность, не достаточную для приведения к превышению оборотов упомянутой вращающейся несущей поверхности на земле:
- при запуске летательного аппарата можно включить вспомогательный двигатель и основные двигатели на земле для приведения в действие вращающейся несущей поверхности,
- в зависимости от системы обнаружения, если летательный аппарат движется в полете с поступательной скоростью, превышающей пороговую поступательную скорость, или если вращающаяся несущая поверхность превышает пороговую скорость вращения, или если мощность, необходимая для приведения в действие вращающейся несущей поверхности, меньше мощности, выдаваемой вспомогательным двигателем, блокируют вспомогательный двигатель.
Согласно второму варианту выполнения, если вспомогательный двигатель развивает максимальную мощность, достаточную для приведения к превышению оборотов упомянутой вращающейся несущей поверхности:
- на земле включают основные двигатели для приведения в действие вращающейся несущей поверхности и блокируют вспомогательный двигатель,
- в полете, если летательный аппарат движется с поступательной скоростью ниже пороговой скорости и если скорость вращения вращающейся несущей поверхности ниже пороговой скорости вращения, или если мощность, необходимая для приведения в действие вращающейся несущей поверхности, больше располагаемой мощности, выдаваемой вспомогательным двигателем, согласно системе обнаружения, вспомогательный двигатель больше не блокируют.
Краткое описание чертежей
Изобретение и его преимущества будут более очевидны из нижеследующего описания иллюстративных примеров выполнения со ссылками на прилагаемые фигуры, на которых:
Фиг. 1 и 2 - варианты летательного аппарата в соответствии с изобретением.
Фиг. 3 и 4 - схемы, относящиеся к вариантам регулирования вспомогательного двигателя.
Фиг. 5 - схема, иллюстрирующая работу первого варианта выполнения изобретения.
Фиг. 6 - схема, иллюстрирующая работу второго варианта выполнения изобретения.
Элементы на разных фигурах имеют одинаковые обозначения.
Описание вариантов осуществления
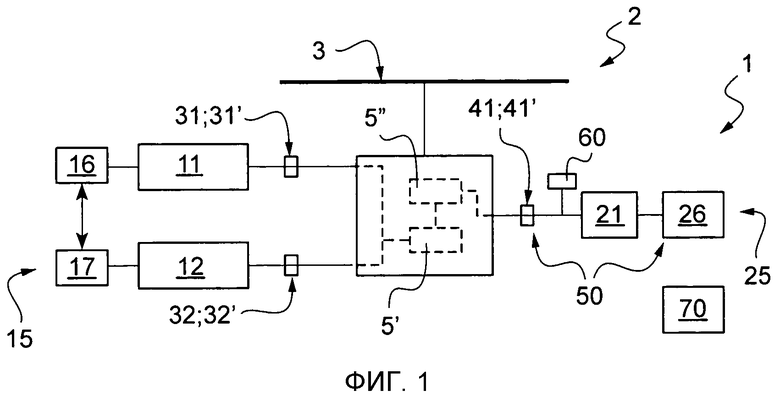
На фиг. 1 представлен летательный аппарат 1, оборудованный вращающейся несущей поверхностью 2 и по меньшей мере одним главным редуктором 5, приводящим во вращение эту вращающуюся несущую поверхность 2.
Вращающаяся несущая поверхность может включать в себя по меньшей мере один несущий и даже тяговый винт 3.
Эта вращающаяся несущая поверхность может включать в себя несколько винтов. В случае необходимости главный редуктор 5 может вращать винт, например, через дополнительный редуктор.
Кроме того, летательный аппарат 1 оборудован тремя двигателями, предназначенными для приведения в движение главного редуктора 5.
Так, летательный аппарат содержит первый основной двигатель 11 и второй основной двигатель 12, которые могут быть идентичными. Эти основные двигатели 11, 12 могут быть тепловыми двигателями, такими как газотурбинные двигатели со свободной турбиной. Каждый основной двигатель оборудован выходным валом, связанным с главным редуктором 5.
Каждый основной двигатель 11, 12 может работать по меньшей мере в одном нормальном режиме использования и по меньшей мере в одном чрезвычайном режиме использования.
В случае необходимости каждый основной двигатель может быть сертифицирован для работы во взлетном режиме, иногда известном под аббревиатурой PMD, в режиме продолжительной мощности, иногда известном под аббревиатурой РМС, и в переходном режиме, иногда известном под аббревиатурой РМТ. Кроме того, каждый основной двигатель может быть сертифицирован для работы в продолжительном чрезвычайном режиме, иногда известном под аббревиатурой OEI, в первом суперчрезвычайном режиме, иногда известном под аббревиатурой OEI 2′, и во втором суперчрезвычайном режиме, иногда известном под аббревиатурой OEI 30″.
Согласно изобретению, может быть достаточно одного чрезвычайного режима.
Между выходным валом каждого основного двигателя и главным редуктором может быть установлена система разъединения. Такая система может включать в себя по меньшей мере одно колесо свободного хода 31, 32 и/или по меньшей мере одно сцепление 31′, 32′ и даже систему понижения с одной или несколькими скоростями вращения типа коробки скоростей.
Кроме того, летательный аппарат содержит основную систему 15 регулирования для регулирования основных двигателей по переменному заданному значению. Например, основная система регулирования применяет заданное значение скорости вращения NTL свободной турбины основных двигателей. Это заданное значение меняется при текущем режиме использования двигателя в зависимости от необходимой развиваемой мощности и от заданных величин, внешних относительно летательного аппарата, и даже от условий использования другого двигателя.
Эта основная система 15 регулирования может содержать первый основной блок 16 управления, регулирующий первый основной двигатель 11, и второй основной блок 17 управления, регулирующий второй основной двигатель 12. Первый основной блок 16 управления может в случае необходимости сообщаться со вторым основным блоком 17 управления.
Кроме того, летательный аппарат содержит вспомогательный двигатель 21, предназначенный для приведения в движение главного редуктора 5. Этот вспомогательный двигатель может быть тепловым или электрическим двигателем, идентичным или, возможно, отличным от основных двигателей. В частности, вспомогательный двигатель 21 может иметь быстроту реакции ниже, чем у основных двигателей 11, 12, и, следовательно, время реакции при ускорении или при замедлении меньше, чем время реакции основных двигателей 11, 12.
Вспомогательный двигатель может быть выполнен таким образом, чтобы производить мощность, меньшую мощности, которую может производить основной двигатель.
В варианте, показанном на фиг. 1, вспомогательный двигатель может быть связан с главным редуктором 5.
Обычно главный редуктор 5 содержит несколько ступеней 5′, 5″ редукции скорости вращения. Если основные и вспомогательный двигатели имеют разные характеристики, то основные двигатели 11, 12 могут быть соединены с первой ступенью 5′ редукции, адаптированной к их характеристикам, а вспомогательный двигатель 21 соединен со второй ступенью 5″ редукции, которая адаптирована к его характеристикам.
В варианте, показанном на фиг. 2, вспомогательный двигатель 21 может быть установлен параллельно с основным двигателем.
Если основные и вспомогательный двигатели имеют разные характеристики, на выходе основного двигателя, взаимодействующего со вспомогательным двигателем, может быть установлен редуктор 33 скорости вращения.
Независимо от варианта предпочтительно вспомогательный двигатель работает в единственном режиме. Вместе с тем, этот вспомогательный двигатель 21 может быть связан с несколькими режимами, например, чтобы соответствовать разным типам полетных заданий или летательных аппаратов.
При этом летательный аппарат 1 имеет вспомогательную систему 25 регулирования, которая регулирует вспомогательный двигатель 21. При текущем режиме использования вспомогательного двигателя вспомогательная система 25 регулирования управляет вспомогательным двигателем, заставляя его стремиться к постоянному заданному значению, в отличие от регулирования, применяемого к основным двигателям.
Это заданное значение не меняется в течение всего времени применения текущего режима. Понятно, что под «регулированием по постоянному заданному значению» имеется в виду применение фиксированного заданного значения для текущего режима использования.
Например, вспомогательный двигатель может быть выполнен с возможностью регулирования по мощности и работать в первом и втором режимах, соответствующих мощности 200 киловатт и 400 киловатт.
Во время применения первого режима регулирование стремится поддерживать мощность, развиваемую вспомогательным двигателем, в фиксированном постоянном заданном значении 200 киловатт. Если пилот меняет режим вспомогательного двигателя на второй режим, регулирование стремится поддерживать мощность, развиваемую вспомогательным двигателем, в фиксированном постоянном заданном значении 400 киловатт. В любом случае, регулирование все время применяет постоянное и, следовательно, фиксированное заданное значение.
При этом, по сути, вспомогательная система 25 регулирования не зависит от основной системы 15 регулирования.
Представленная вспомогательная система 25 регулирования содержит вспомогательный блок 26 управления для управления вспомогательным двигателем 21, при этом вспомогательный блок 26 управления лишен связи с основными блоками 16, 17 управления.
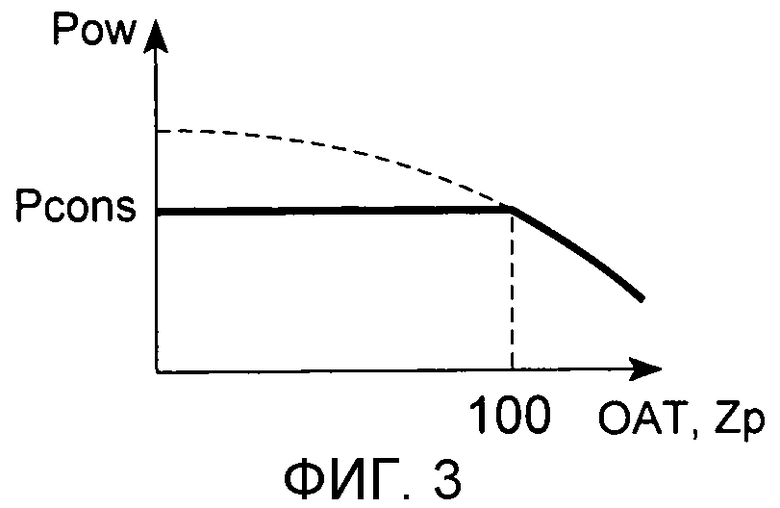
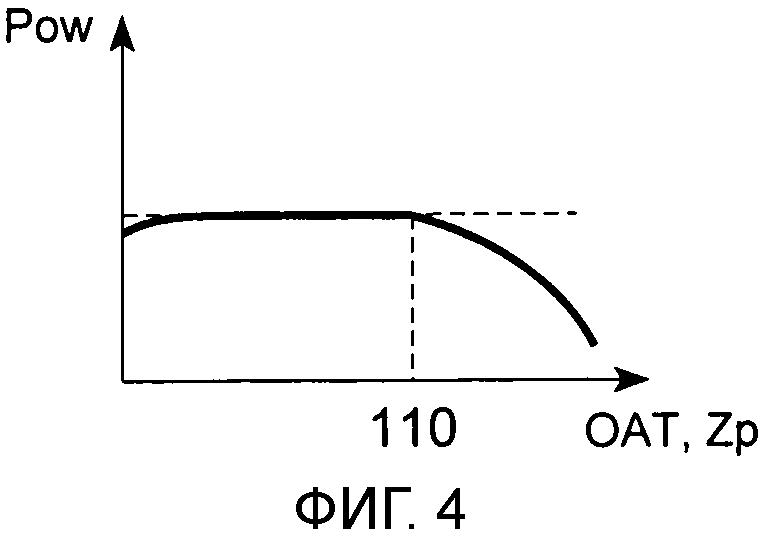
На фиг. 3 и 4 представлены диаграммы, показывающие внешние условия по температуре наружного воздуха (ОАТ) и/или высоте полета на оси абсцисс, и мощность, развиваемую вспомогательным двигателем, на оси ординат.
Таким образом, как показано на фиг. 3, заданное значение может быть заданной мощностью. Вместе с тем, понятно, что, начиная с порога 100, вспомогательный двигатель больше не сможет развивать заданную мощность Pcons, учитывая внешние условия по температуре наружного воздуха (ОАТ) и/или высоте полета летательного аппарата.
Как показано на фиг. 4, заданное значение может быть фиксированным заданным расходом топлива, определяемым таким образом, чтобы развивать заданную мощность в точке 110 определения параметров летательного аппарата. При этом мощность, выдаваемая вспомогательным двигателем, зависит от внешних условий по температуре наружного воздуха (ОАТ) и/или от высоты полета летательного аппарата.
Кроме того, как показано на фиг. 1, между вспомогательным двигателем 21 и главным редуктором 5 установлена система разъединения. Такая система может включать в себя по меньшей мере одно колесо 41 свободного хода и/или по меньшей мере одно сцепление 41′ и даже систему редукции с одной или несколькими скоростями вращения типа коробки скоростей.
Кроме того, летательный аппарат может содержать средство 50 деактивации вспомогательного двигателя 21. Такое средство 50 деактивации может включать в себя систему разъединения или вспомогательный блок управления.
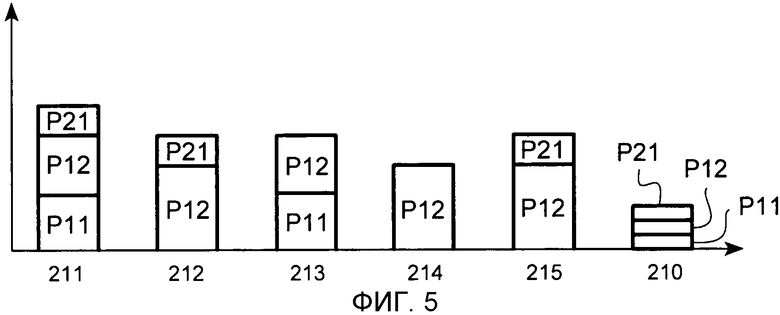
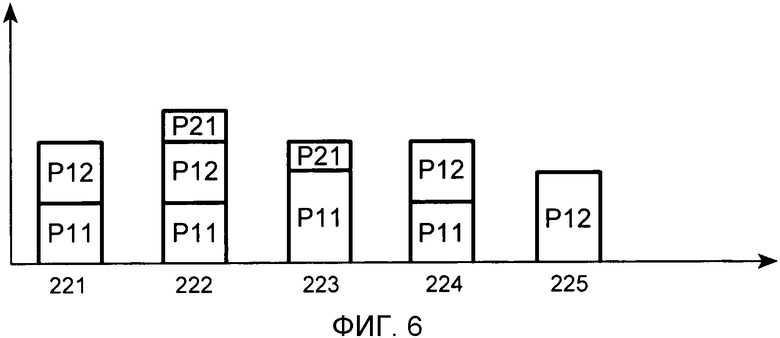
На фиг. 5 и 6 представлены схемы, иллюстрирующие работу летательного аппарата согласно первому и второму вариантам выполнения. На каждой из этих фиг. 5 и 6 на оси ординат схематично представлена мощность, развиваемая двигателями, в зависимости от различных ситуаций полета. Значения мощности, развиваемой первым основным двигателем, а также вторым основным двигателем и вспомогательным двигателем, обозначены на фиг. 5 и 6 соответственно Р11, Р12, Р21.
Независимо от варианта выполнения понятно, что применяемый способ предполагает установку вспомогательного двигателя 21, предназначенного для приведения в движение главного редуктора 5, и регулирование этого вспомогательного двигателя 21 по постоянному заданному значению при помощи вспомогательной системы 25 регулирования, которая не зависит от основной системы 15 регулирования.
В случае необходимости вспомогательный двигатель 21 можно регулировать таким образом, чтобы быстрота реакции вспомогательного двигателя 21 была ниже, чем быстрота реакции основных двигателей 11, 12, то есть чтобы время реагирования вспомогательного двигателя 21 превышало время реагирования основных двигателей 11, 12.
Кроме того, вспомогательный двигатель 21 можно, например, регулировать либо в зависимости от фиксированной заданной мощности, либо в зависимости от фиксированного расхода топлива.
Согласно первому варианту выполнения, вспомогательный двигатель 21 выполнен таким образом, чтобы развивать небольшую максимальную мощность. Эту максимальную мощность называют небольшой, поскольку этой максимальной мощности недостаточно, чтобы привести вращающуюся несущую поверхность 2 к превышению оборотов, когда основные двигатели остановлены или работают в режиме малого газа.
Поэтому вспомогательный двигатель можно запускать на земле без риска вызвать превышения оборотов вращающейся несущей поверхности.
Во время первой ситуации 210 вспомогательный двигатель 21 и основные двигатели 11, 12 запускают на земле для приведения в действие вращающейся несущей поверхности 2. Поскольку основные двигатели регулируются по переменному заданному значению, основная система регулирования позволяет гарантировать, что основные и вспомогательный двигатели не вызовут превышения оборотов вращающейся несущей поверхности.
В случае необходимости основные двигатели развивают на земле нулевую мощность.
В случае необходимости вспомогательный двигатель имеет специальный режим регулирования свободной турбины на земле, предназначенный для генерирования электрической энергии при отключенном сцеплении для приведения в действие электрических генераторов, механически связанных со свободной турбиной.
В случае необходимости вспомогательный двигатель имеет специальный режим регулирования газогенератора на земле, предназначенный для генерирования электрической энергии при отключенном сцеплении, для приведения в действие электрических генераторов, механически связанных с газогенератором.
Кроме того, когда летательный аппарат 1 движется в полете с поступательной скоростью, превышающей пороговую поступательную скорость, или когда вращающаяся несущая поверхность превышает пороговую скорость вращения, вспомогательный двигатель 21 блокируют.
Если же, наоборот, летательный аппарат 1 движется в полете с поступательной скоростью ниже пороговой поступательной скорости или когда скорость вращения вращающейся несущей поверхности ниже пороговой скорости вращения, вспомогательный двигатель 21 не блокируют.
Таким образом, во время фазы 211 взлета или в режиме висения вспомогательный двигатель 21 работает.
Однако если скорость вращения вращающейся несущей поверхности превышает пороговую скорость вращения, вспомогательный двигатель блокируют. При этом вспомогательная система регулирования переводит вспомогательный двигатель в режим малого газа или останавливает его.
Пороговая скорость вращения может быть ниже скорости, соответствующей превышению оборотов вращающейся несущей поверхности, но все же выше номинальной скорости вращения вращающейся несущей поверхности.
В случае выхода из строя одного основного двигателя в конфигурации 212 другой основной двигатель регулируют таким образом, чтобы развивать дополнительную мощность, при этом вспомогательный двигатель остается активным для приведения в действие вращающейся несущей поверхности.
Вместе с тем, при обычном поступательном полете, представленном конфигурацией 213, вспомогательный двигатель заблокирован.
В случае отказа одного основного двигателя в конфигурации 214 другой основной двигатель можно регулировать таким образом, чтобы развивать дополнительную мощность согласно конфигурации 214. В случае необходимости и дополнительно работа остающегося в строю основного двигателя может быть дополнена работой вспомогательного двигателя 21 согласно конфигурации 215.
При вспомогательном двигателе, развивающем умеренную мощность по сравнению с основными двигателями, отмечается, что в конфигурации отказа 215 можно развивать общую мощность, равную общей мощности, достигаемой при отсутствии отказа, что показано конфигурацией 213.
Согласно второму варианту выполнения, вспомогательный двигатель 21 выполнен с возможностью развивать повышенную максимальную мощность. Эту максимальную мощность называют повышенной, поскольку эта максимальная мощность является достаточной для приведения к превышению оборотов вращающейся несущей поверхности 2, когда основные двигатели не работают или даже работают в режиме малого газа.
При этом основные двигатели включают на земле для приведения в действие вращающейся несущей поверхности и вспомогательный двигатель блокируют, пока летательный аппарат движется на высоте ниже пороговой высоты или когда вращающаяся несущая поверхность превышает пороговую скорость вращения.
Когда летательный аппарат движется с поступательной скоростью ниже пороговой скорости и на высоте, превышающей пороговую высоту, вспомогательный двигатель больше не блокируют.
Как показано на фиг. 1, летательный аппарат 1 оборудован средством 70 обнаружения, чтобы обнаруживать, что летательный аппарат находится на земле. Это средство 70 обнаружения содержит, например, радиовысотомер или датчик, установленный на шасси.
В случае необходимости летательный аппарат 1 оборудуют системой обнаружения, чтобы обнаруживать, имеет ли летательный аппарат поступательную скорость, превышающую пороговую поступательную скорость, и/или превышает ли вращающаяся несущая поверхность пороговую скорость вращения. Система обнаружения содержит, например, обычные средства измерения поступательной скорости летательного аппарата, средства измерения скорости вращения вращающейся несущей поверхности и/или средства определения мощности, производимой вспомогательным двигателем, и/или средства определения мощности, необходимой для приведения в действие вращающейся несущей поверхности.
Кроме того, летательный аппарат содержит средство блокировки, блокирующее вспомогательный двигатель, если соблюдено по меньшей мере одно из следующих трех условий:
- летательный аппарат находится на земле,
- летательный аппарат имеет поступательную скорость, превышающую пороговую поступательную скорость,
- скорость вращения вращающейся несущей поверхности превышает пороговую скорость вращения, или мощность, необходимая для приведения в действие вращающейся несущей поверхности, меньше имеющейся мощности, производимой вспомогательным двигателем.
Согласно версии, средство блокировки может содержать средство 60 торможения вспомогательного двигателя.
В альтернативном варианте, когда между вспомогательным двигателем 21 и главным редуктором 5 установлено колесо 41 свободного хода, средство блокировки содержит средство перевода в режим малого газа или останова вспомогательного двигателя, чтобы избежать превышения оборотов.
Если же между вспомогательным двигателем 21 и главным редуктором 5 установлено сцепление 41′, средство блокировки содержит средство включения и отключения сцепления. При этом вспомогательный двигатель может иметь специальный режим регулирования в режиме отключенного сцепления.
Управление блокировкой вспомогательного двигателя может быть автоматическим, например через вспомогательную систему регулирования, и/или ручным.
В конфигурации 221, показанной на фиг. 6, на земле вспомогательный двигатель заблокирован.
При наличии колеса свободного хода вспомогательный двигатель может находиться в режиме малого газа или может быть остановлен.
При наличии сцепления вспомогательный двигатель может находиться в режиме малого газа, может быть остановлен или может быть переведен в специальный режим регулирования для генерирования электрической энергии.
Взлет осуществляют, используя только основные двигатели для приведения в действие вращающейся несущей поверхности до высоты, на которой летательный аппарат остается в зоне влияния земли. Если один двигатель выходит из строя, летательный аппарат все еще находится достаточно близко от земли, чтобы сесть.
Когда летательный аппарат взлетает, задействуют вспомогательный двигатель.
Во время полета вспомогательный двигатель можно использовать, если летательный аппарат движется с поступательной скоростью ниже пороговой скорости согласно конфигурации 222 или если мощность, развиваемая вспомогательным двигателем, меньше мощности, необходимой для вращающейся несущей поверхности.
При этом вспомогательный двигатель находится в положении полета, и в случае необходимости можно включить сцепление, при его наличии.
В случае необходимости проверка нормальной работы основных и вспомогательного двигателей производится пилотом или электронной системой летательного аппарата в зоне влияния земли.
В случае отказа одного основного двигателя, показанной в виде конфигурации 223, другой основной двигатель регулируют таким образом, чтобы производить дополнительную мощность, при этом вспомогательный двигатель остается активным и участвует в приведении в действие вращающейся несущей поверхности.
С другой стороны, во время обычного поступательного полета, представленного конфигурацией 224, вспомогательный двигатель заблокирован. При этом летательный аппарат летит с поступательной скоростью, превышающей пороговую скорость.
В случае отказа одного основного двигателя, показанного в виде конфигурации 225, другой основной двигатель регулируют таким образом, чтобы производить дополнительную мощность. В случае необходимости и дополнительно работа остающегося в строю основного двигателя может быть дополнена работой вспомогательного двигателя 21.
Во время посадки все три двигателя производят необходимую мощность. Действительно, поступательная скорость летательного аппарата ниже пороговой поступательной скорости.
Когда высота полета летательного аппарата достигает земли, вспомогательный двигатель блокируют, переводя его либо в режим малого газа, либо останавливая. В зависимости от варианта считают, что земля достигнута, когда летательный аппарат касается земли или когда летательный аппарат достигает высоты ниже пороговой высоты, измеряемой радиовысотомером.
В этой последней конфигурации посадка до касания земли производится при помощи двух основных двигателей 11, 12.
При касании земли с малым шагом лопастей вращающейся несущей поверхности пилот или электронная система летательного аппарата производят проверку состояния вспомогательного двигателя для проверки его работы в режиме малого газа или его останова.
На земле и согласно версии с наличием сцепления вспомогательный двигатель мог бы быть заблокирован в состоянии полета (при регулировании по фиксированному заданному значению), но сцепление может быть отключено или согласно его специальному регулированию для генерирования электрической энергии.
Естественно, в настоящее изобретение можно вносить различные изменения. Хотя выше были описаны несколько вариантов выполнения, понятно, что невозможно исчерпывающе идентифицировать все возможные варианты. Можно заменить одно описанное средство эквивалентным средством, не выходя за рамки настоящего изобретения.
Например, вспомогательный двигатель можно запустить или даже использовать постоянно во время полета или использовать периодически согласно альтернативным процедурам.
Изобретение относится к области авиации, в частности к конструкциям приводов несущих винтов винтокрылых летательных аппаратов. Летательный аппарат (1) оснащен вращающейся несущей поверхностью (2) и по меньшей мере одним главным редуктором (5) для приведения во вращение упомянутой вращающейся несущей поверхности (2). Упомянутый летательный аппарат (1) содержит первый (11) и второй (12) основные двигатели, предназначенные для приведения в действие упомянутого главного редуктора (5), при этом летательный аппарат (1) оснащен основной системой (15) регулирования, регулирующей основные двигатели (11,12) по переменному заданному значению. Вспомогательный двигатель (21) тоже может приводить в действие упомянутый главный редуктор (5), причем упомянутый летательный аппарат (1) имеет вспомогательную систему (25) регулирования, которая регулирует вспомогательный двигатель (21) по постоянному заданному значению и которая является независимой от упомянутой основной системы (15) регулирования. Достигается возможность выполнения режима висения при отказе одного из двигателей. 2 н. и 19 з.п. ф-лы, 6 ил. 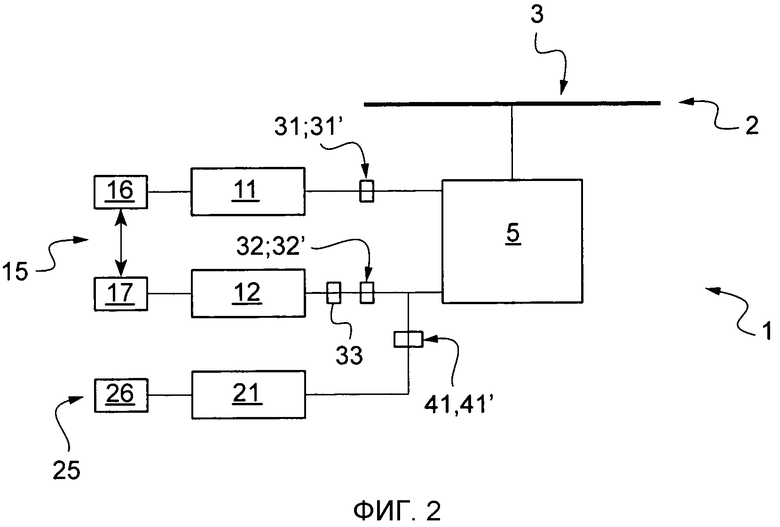
1. Летательный аппарат (1), оснащенный вращающейся несущей поверхностью (2) и по меньшей мере одним главным редуктором (5) для приведения во вращение упомянутой вращающейся несущей поверхности (2), при этом упомянутый летательный аппарат (1) содержит первый основной двигатель (11) и второй основной двигатель (12), приводящие в движение упомянутый главный редуктор (5), при этом упомянутый летательный аппарат (1) оснащен основной системой (15) регулирования, регулирующей первый основной двигатель (11) и второй основной двигатель (12) по переменному заданному значению,
отличающийся тем, что упомянутый летательный аппарат (1) оснащен вспомогательным двигателем (21), приводящим в движение упомянутый главный редуктор (5), причем упомянутый летательный аппарат (1) имеет вспомогательную систему (25) регулирования, которая регулирует вспомогательный двигатель (21) по постоянному заданному значению, при этом вспомогательная система (25) регулирования является независимой от упомянутой основной системы (15) регулирования.
2. Летательный аппарат по п. 1, отличающийся тем, что упомянутая основная система (15) регулирования содержит первый основной блок (16) управления для управления первым основным двигателем (11) и второй основной блок (17) управления для управления вторым основным двигателем (12), при этом первый основной блок (16) управления сообщается со вторым основным блоком (17) управления, при этом упомянутая вспомогательная система (25) регулирования содержит вспомогательный блок (26) управления для управления вспомогательным двигателем (21), при этом упомянутый вспомогательный блок (26) управления лишен связи с основными блоками (16, 17) управления.
3. Летательный аппарат по п. 1, отличающийся тем, что между каждым двигателем (11, 12, 21) и упомянутым главным редуктором (5) установлено колесо свободного хода (31, 32, 41) или сцепление (31′, 32′, 41′).
4. Летательный аппарат по п. 1, отличающийся тем, что упомянутый вспомогательный двигатель (21) имеет быстроту реакции ниже, чем быстрота реакции основных двигателей (11, 12).
5. Летательный аппарат по п. 1, отличающийся тем, что упомянутые основные двигатели (11, 12) являются идентичными, при этом вспомогательный двигатель (21) отличается от упомянутых основных двигателей (11, 12).
6. Летательный аппарат по п. 5, отличающийся тем, что упомянутый главный редуктор (5) содержит несколько ступеней (5′, 5′′) редукции, при этом упомянутые основные двигатели (11, 12) соединены с первой ступенью (5′) редукции скорости вращения, а упомянутый вспомогательный двигатель (21) соединен со второй ступенью (5′′) редукции скорости вращения.
7. Летательный аппарат по п. 1, отличающийся тем, что каждый основной двигатель (11, 12) имеет один чрезвычайный режим.
8. Летательный аппарат по п. 1, отличающийся тем, что упомянутый вспомогательный двигатель (21) имеет по меньшей мере два рабочих режима, каждый из которых регулируется в зависимости от постоянного заданного значения.
9. Летательный аппарат по п. 1, отличающийся тем, что упомянутым постоянным заданным значением является либо фиксированное заданное значение мощности, либо фиксированное заданное значение расхода топлива, когда упомянутый вспомогательный двигатель является тепловым двигателем.
10. Летательный аппарат по п. 1, отличающийся тем, что упомянутый летательный аппарат содержит средство (50) деактивации для деактивации упомянутого вспомогательного двигателя (21).
11. Летательный аппарат по п. 1, отличающийся тем, что упомянутый вспомогательный двигатель (21) развивает максимальную мощность, не достаточную для приведения к превышению оборотов упомянутой вращающейся несущей поверхности (2) на земле.
12. Летательный аппарат по п. 1, отличающийся тем, что упомянутый вспомогательный двигатель (21) развивает максимальную мощность, достаточную для приведения к превышению оборотов упомянутой вращающейся несущей поверхности (2), при этом упомянутый летательный аппарат (1) содержит средство (70) обнаружения, чтобы обнаруживать, находится ли летательный аппарат на земле, при этом упомянутый летательный аппарат имеет средство блокировки, блокирующее упомянутый вспомогательный двигатель на земле.
13. Летательный аппарат по п. 1, отличающийся тем, что упомянутый летательный аппарат может содержать систему обнаружения для того, чтобы обнаруживать, имеет ли летательный аппарат поступательную скорость, превышающую пороговую поступательную скорость, и/или превышает ли вращающаяся несущая поверхность пороговую скорость вращения, при этом упомянутый летательный аппарат имеет средство блокировки, блокирующее вспомогательный двигатель, если летательный аппарат имеет поступательную скорость, превышающую пороговую поступательную скорость, и/или если вращающаяся несущая поверхность превышает пороговую скорость вращения, и/или если мощность, необходимая для приведения в действие вращающейся несущей поверхности, меньше имеющейся мощности, развиваемой вспомогательным двигателем.
14. Летательный аппарат по п. 12, отличающийся тем, что упомянутое средство блокировки содержит средство (60) торможения упомянутого вспомогательного двигателя.
15. Летательный аппарат по п. 12, отличающийся тем, что, если между упомянутым вспомогательным двигателем (21) и упомянутым главным редуктором (5) установлено колесо (41) свободного хода, упомянутое средство блокировки содержит средство перевода в режим малого газа или останова упомянутого вспомогательного двигателя.
16. Летательный аппарат по п. 12, отличающийся тем, что, если между упомянутым вспомогательным двигателем (21) и упомянутым главным редуктором (5) установлено сцепление (41′), упомянутое средство блокировки содержит средство отключения упомянутого сцепления.
17. Способ приведения во вращение главного редуктора (5), приводящего во вращение вращающую несущую поверхность (2) летательного аппарата (1), при этом упомянутый летательный аппарат (1) содержит первый основной двигатель (11) и второй основной двигатель (12), приводящие в движение упомянутый главный редуктор (5), при этом упомянутый летательный аппарат (1) оборудован основной системой (15) регулирования, регулирующей первый основной двигатель (11) и второй основной двигатель (12) по переменному заданному значению,
отличающийся тем, что устанавливают вспомогательный двигатель (21), предназначенный для приведения в движение упомянутого главного редуктора (5), и вспомогательный двигатель (21) регулируют по постоянному заданному значению при помощи вспомогательной системы (25) регулирования, которая не зависит от упомянутой основной системы (15) регулирования.
18. Способ по п. 17, отличающийся тем, что вспомогательный двигатель (21) регулируют таким образом, чтобы быстрота реакции вспомогательного двигателя (21) была ниже, чем у основных двигателей.
19. Способ по п. 17, отличающийся тем, что вспомогательный двигатель регулируют либо в зависимости от фиксированного заданного значения мощности, либо в зависимости от фиксированного заданного значения расхода топлива, если упомянутый вспомогательный двигатель является тепловым двигателем.
20. Способ по п. 17, отличающийся тем, что, если упомянутый вспомогательный двигатель (21) развивает максимальную мощность, не достаточную для приведения к превышению оборотов упомянутой вращающейся несущей поверхности (2) на земле:
- при запуске летательного аппарата (1) включают вспомогательный двигатель (21) и основные двигатели (11, 12) на земле для приведения в действие вращающейся несущей поверхности (2),
- если летательный аппарат (1) движется в полете с поступательной скоростью, превышающей пороговую поступательную скорость, или если вращающаяся несущая поверхность превышает пороговую скорость вращения, и/или если мощность, необходимая для приведения в действие вращающейся несущей поверхности, меньше располагаемой мощности, выдаваемой вспомогательным двигателем, блокируют вспомогательный двигатель (21).
21. Способ по п. 17, отличающийся тем, что, если упомянутый вспомогательный двигатель (21) развивает максимальную мощность, достаточную для приведения к превышению оборотов упомянутой вращающейся несущей поверхности (2):
- на земле включают основные двигатели для приведения в действие вращающейся несущей поверхности и блокируют вспомогательный двигатель,
- в полете, если летательный аппарат движется с поступательной скоростью ниже пороговой скорости и если скорость вращения вращающейся несущей поверхности ниже пороговой скорости вращения, и/или если мощность, необходимая для приведения в действие вращающейся несущей поверхности, больше располагаемой мощности, выдаваемой вспомогательным двигателем, вспомогательный двигатель больше не блокируют.
| FR 2933910 A1, 22.01.2010 | |||
| РЕДУКТОР ПРИВОДА НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 1997 |
|
RU2146636C1 |
| US 2009186320 A1, 23.07.2009 | |||
| US 4817046 A, 28.03.1989 | |||
| US 3963372 A, 15.06.1976 | |||

