Изобретение относится к автомобильному транспорту, а именно к системам управления прицепными транспортными устройствами. Изобретение может быть использовано для увеличения грузоподъемности и проходимости транспортных средств.
Известен способы и устройства управления прицепом, в которых для улучшения динамики управления при прохождении тяжелых участков дорог и решения проблем трогания с места используется привод от двигателя тягача на ведущие колеса прицепа посредством карданных валов, описанные, например, в патенте РФ №2167779 и патенте РФ №2011558.
Описанные в названных патентах устройства управления прицепом характеризуются:
- значительной массой механических элементов конструкции привода, снижающей грузоподъемность прицепа в целом;
- снижением дорожного просвета из-за установки карданного вала, а также снижением общей надежности при нарушении его функционирования;
- ограничением углов поворота тягача с прицепом при использовании как карданного вала, оборудованного крестовинами, так и карданного вала, оборудованного шарниром равных угловых скоростей.
Известно устройство управления, в котором прицеп оборудуется самостоятельным приводным двигателем, который оснащается трансмиссией и совместно с двигателем тягача дополняется автоматической коробкой переключения передач, пульты управления которыми включаются в состав бортового комплекса автоматизированного системного управления, описанное в патенте РФ №2539702. Такое решение позволяет упростить кинематическую схему управления за счет исключения наличия карданного вала между тягачом и прицепом. Однако из-за наличия дополнительного приводного двигателя прицепа имеет место увеличение стоимости и снижение грузоподъемности прицепа из-за значительного увеличения его массы.
Известен способ и устройство управления прицепом с использованием рекуперации энергии торможения, описанные в патенте РФ №2291081. Согласно известному способу для торможения автопоезда с тягачом используется кинетическая энергия транспортного средства, замедляющегося при нажатии на педаль тормоза. Энергия преобразуется генератором в электрический ток для торможения прицепа посредством электромагнитных приводов колесных тормозов. Устройство управления содержит трансмиссию тягача, генератор постоянного тока независимого возбуждения, источник постоянного тока, реостат, электромагнитные приводы и тормозные механизмы колес с прицепом.
Недостатком данного решения является наличие в процессе рекуперации двойного преобразования энергии - механической в электрическую, а затем электрической в механическую, что приводит к значительным потерям накапливаемой энергии. Кроме того, накопленная энергия используется только для повышения эффективности торможения, а не для повышения проходимости тягача с прицепом. В данном способе и устройстве при управлении не анализируется и не учитывается информации о параметрах движения прицепа и состоянии привода прицепа для обеспечения устойчивости его движения.
Также известен способ приведения в действие тормоза на прицепе, который буксируется тягачом, и система для его осуществления, описанные в патентной заявке US 20080177454. В соответствии с известным способом осуществляют определение угловой скорости тягача по отношению к оси рыскания тягача, определение бокового ускорения тягача по отношению к оси тангажа тягача, определение угла поворота тягача, ввод в память процессора скорости рыскания, бокового ускорения тягача и угла поворота тягача, расчет нужного тормозного усилия для тормоза на прицепе в ответ на введенные скорость рыскания, боковое ускорение и угол поворота рулевого колеса и отправку сигнала на выход к тормозам на прицепе, приводящего в действие тормозное усилие, соразмерное с желаемой силой торможения.
Известная система управления для приведения в действие тормоза на прицепе, который буксируется тягачом, содержит электронный контроллер стабильности, в том числе датчик угловой скорости рыскания, боковой датчик ускорения и датчик угла поворота рулевого колеса, для сбора данных об изменении в положении тягача по отношению к оси рыскания и тангажу оси тягача; контроллер тормозов прицепа, включающий процессор с памятью, с которым связаны контроллер тормозов прицепа и электронный контроллер стабильности, на выходе которого формируется сигнал, реагирующий на скорость рыскания, боковое ускорение и угол поворота рулевого колеса, соразмерный с желаемой силой торможения для координации приведения в действие тормоза на прицепе по отношению к тягачу.
Такое решение позволяет стабилизировать движение тягача с прицепом в части компенсации нежелательных отклонений от продольной и поперечной оси движения прицепа.
Недостатком этого способа и устройства является низкая динамика управления при прохождении тяжелых участков дорог и трогании с места, обусловленная ограниченной конечной мощностью двигателя тягача, а также малой площадью сцепления ведущих колес с дорожным покрытием, что приводит к пробуксовке колес тягача, износу шин, перерасходу топлива, а в отдельных случаях к поломке деталей трансмиссии или тягово-сцепных устройств.
Кроме того, органы управления и контроля движения прицепа известного устройства расположены только на тягаче, вследствие чего управляющий сигнал на тормозные механизмы всех колес прицепа формируется без учета скорости вращения каждого из них, что может привести к их блокировке и потере устойчивости движения прицепа. И только после этого по сигналам датчиков, установленных на тягаче, будет сформирован корректирующий сигнал управления на тормозные механизмы колес прицепа. То есть система управления известного устройства имеет повышенную инерционность (низкую динамику управления) еще и вследствие того, что принципиально формирует корректирующий сигнал только после того, как нарушилась устойчивость движения прицепа.
Наиболее близким к заявленному изобретению является устройство управления n-осным прицепом тягача, описанное в патентной заявке US 20080067862. Известное устройство содержит блок управления тормозами, соответствующие входы которого подключены к датчику педали тормоза тягача и к датчикам скорости вращения колес n-осного прицепа, тормозной привод n-осного прицепа, вход которого соединен с устройством управления тормозной системой тягача, а выход подключен к тормозным механизмам, установленным на каждой оси n-осного прицепа. Блок управления тормозами, установленный на прицепе, вырабатывает управляющий сигнал для тормозных механизмов колес прицепа с учетом электрических сигналов датчиков установленных на прицепе, а также электрических управляющих сигналов с устройства управления тормозами, установленного на тягаче.
Принцип действия описанного устройства управления n-осным прицепом тягача заключается в том, что определяют скорость вращения колес n-осного прицепа, которую передают в блок управления, в который также передают сигналы от тормозной системы тягача. По переданным сигналам вычисляют тормозное усилие для каждого из колес n-осного прицепа, которое передают на тормозной привод n-осного прицепа, в котором формируют управляющее воздействие и направляют на соответствующие тормоза n-осного прицепа.
При этом необходимый сигнал управления для стабилизации движения прицепа, в частности сигнал для предотвращения блокировки колес прицепа, может вырабатываться даже в отсутствие управляющих сигналов со стороны оператора. Такое решение позволяет в значительной степени повысить динамику управления в процессе движения тягача с прицепом на не сильно пересеченных участках дорог и в нормальных погодных условиях.
Однако известный способ и устройство не обеспечивают необходимую динамику управления на тяжелых участках дорог, а также при трогании с места с груженым прицепом. Это объясняется тем обстоятельством, что тяговое усилие в известном способе и устройстве приложено только к ведущими колесами тягача, которые имеют ограниченную площадь соприкосновения с полотном дороги, что приводит к их проскальзыванию как при трогании с места, так и при движении в подъем по скользкой дороге. Кроме того, при трогании с места и при движении в подъем с сильно загруженным прицепом двигатель эксплуатируется на пониженных передачах при предельных значениях мощности. При этом колеса прицепа не участвуют в создании тягового усилия.
В основу изобретения положена задача разработать способ управления n-осным прицепом тягача и создать устройство, в котором реализуется данный способ, в которых благодаря использованию дополнительного тягового усилия, приложенного к колесам n-осного прицепа, улучшается динамика управления при прохождении тяжелых участков дорог и при трогании с места.
Поставленная техническая задача решается тем, что в способе управления n-осным прицепом тягача, заключающемся в том, что определяют скорость вращения колес n-осного прицепа, которую передают в блок управления, в который также передают сигналы от тормозной системы тягача, и вычисляют тормозное усилие для каждого из колес n-осного прицепа, которое передают на тормозной привод n-осного прицепа, в котором формируют управляющее воздействие и направляют на соответствующие тормоза n-осного прицепа, согласно изобретению при торможении производят накопление механической энергии на m осях n-осного прицепа, где m≤n, при движении осуществляют регулируемую передачу накопленной механической энергии на m осей n-осного прицепа, а управление тормозами n-осного прицепа осуществляют с учетом текущего значения уровня накопленной механической энергии.
Поставленная техническая задача также решается тем, что устройство управления n-осным прицепом тягача, содержащее блок управления, соответствующие входы которого подключены к датчику педали тормоза тягача и к датчикам скорости вращения колес n-осного прицепа, тормозной привод n-осного прицепа, вход которого соединен с устройством управления тормозной системой тягача, а выход подключен к тормозным механизмам, установленным на каждой оси n-осного прицепа, согласно изобретению дополнительно содержит m рекуператоров механической энергии, закрепленных на m осях n-осного прицепа, где m≤n, индикатор зарядки рекуператоров механической энергии, регулятор разрядки рекуператоров механической энергии, датчик скорости вращения колес тягача и контроллер, к одним входам которого подключены датчик скорости вращения колес тягача, регулятор разрядки рекуператоров механической энергии и датчик педали тормоза тягача, а ко вторым, являющимся информационными входами, подключены датчики скорости вращения колес n-осного прицепа и выходы рекуператоров механической энергии, при этом управляющие выходы контроллера подключены ко входам соответствующих рекуператоров механической энергии, дополнительным входам блока управления и индикатору зарядки рекуператоров механической энергии.
Целесообразно, чтобы каждый рекуператор механической энергии представлял собой пружинный рекуператор и содержал установленный на соответствующей оси прицепа вал с жестко закрепленным на нем входным фланцем, установленный на валу барабан с жестко закрепленным на нем выходным фланцем, пружину, один конец которой жестко закреплен на валу, а другой конец - на барабане, электромагнитную муфту с храповым механизмом, одна из полумуфт которой жестко соединена с входным фланцем, а вторая закреплена на оси прицепа с возможностью осевого перемещения, регулируемый привод с управляемым фиксатором положения барабана, кинематический вход которого жестко соединен с выходным фланцем, обгонную муфту, одна из полумуфт которой жестко соединена с кинематическим выходом регулируемого привода, а вторая закреплена на оси прицепа, и датчики числа оборотов входного и выходного фланцев, подключенные к информационным входам контроллера.
Предпочтительно, чтобы к управляющим выходам контроллера были подключены вход электромагнитной муфты с храповым механизмом, первый и второй входы регулируемого привода с фиксатором положения барабана.
Технический результат заявленного способа управления n-осным прицепом тягача и устройства для осуществления способа заключается в том, что повышается динамика управления n-осным прицепом путем накопления механической энергии в процессе торможения, а при трогании с места и при движении на тяжелых участках дорог - путем отдачи механической энергии. Такая рекуперация механической энергии создает дополнительный крутящий момент на колесах n-осного прицепа и увеличивает крутящий момент тягача с прицепом в целом. При этом создание дополнительного крутящего момента на колеса n-осного прицепа для повышения динамики управления производится без дополнительных затрат энергии двигателя тягача или дополнительных двигателей, установленных на прицепе, как было описано выше.
Использование частного варианта выполнения рекуператоров механической энергии в виде пружинных рекуператоров отличается простотой выполнения и надежностью функционирования, в отличие, например, от маховичных аккумуляторов механической энергии (патентная заявка US 20100151980), которые также позволяют при торможении аккумулировать кинетическую энергию движения транспортных средств, однако имеют низкую надежность ввиду сложности конструкции маховика и передаточного механизма, который должен обеспечить плавность разгона транспортного средства при присоединении его к маховику. Пружинные рекуператоры, в отличие от маховичных аккумуляторов механической энергии, имеют больший КПД, так как только незначительная часть энергии расходуется на нагрев деталей и окружающей среды.
Предложенный способ и устройство управления n-осным прицепом тягача позволяют обеспечить улучшение динамики управления за счет использования энергии рекуперативного торможения при преодолении тяжелых участков дорог и трогании с места. При этом снижается расход топлива, повышается срок службы двигателя тягача, улучшается экологичность из-за снижения объема выхлопных газов, повышается срок эксплуатации тормозных колодок колес тягача и n-осного прицепа, так как энергия торможения в значительной степени поглощается пружинными рекуператорами с последующим полезным использованием.
Изобретение поясняется чертежами, которые не охватывают и тем более не ограничивают весь объем притязаний данного технического решения, а являются лишь иллюстрирующими материалами частного случая выполнения. Связи, указанные между функциональными блоками, в общем случае являются многоканальными для обеспечения алгоритма функционирования, отраженного в формуле и описании изобретения. Питание функциональных блоков может осуществляться от бортовой сети (аккумулятора тягача), которая на чертежах не показана.
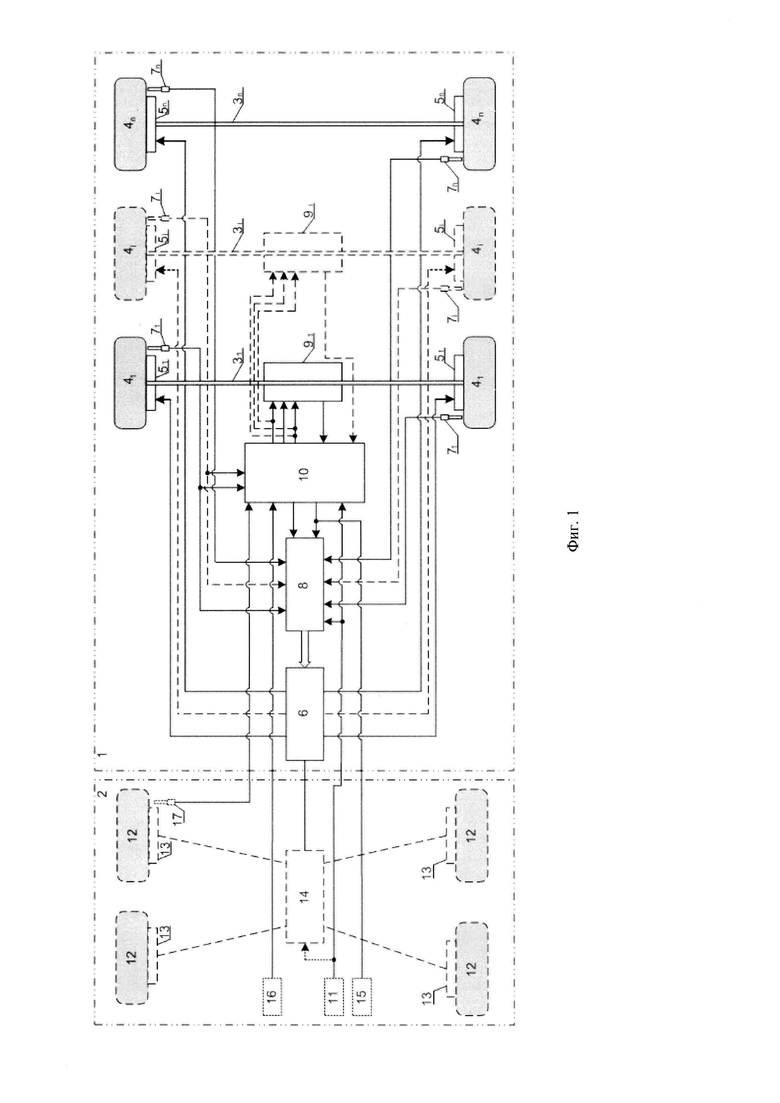
На фиг. 1 приведена функциональная схема устройства управления n-осным прицепом тягача согласно изобретению.
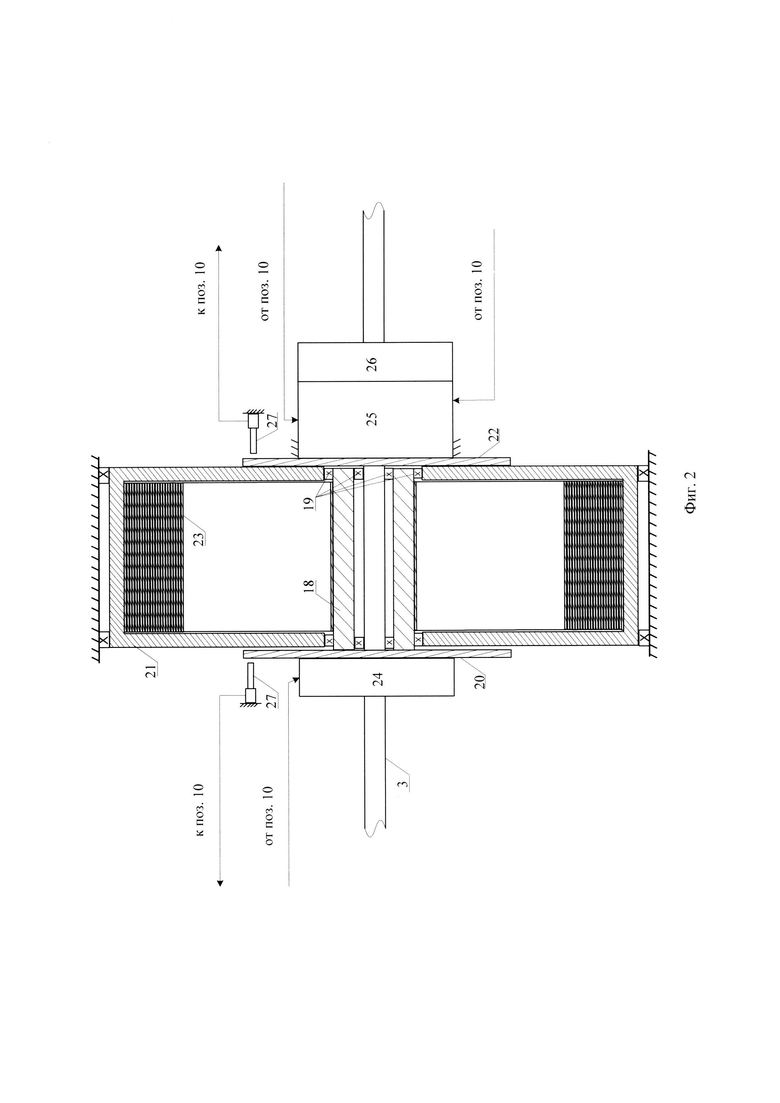
На фиг. 2 приведена функциональная схема одного из возможных вариантов выполнения пружинного рекуператора согласно изобретению.
Способ управления n-осным прицепом тягача заключается в том, что определяют скорость вращения колес n-осного прицепа, которую передают в блок управления, в который также передают сигналы от тормозной системы тягача; в процессе торможения производят накопление механической энергии на m осях n-осного прицепа, где m≤n, а при движении осуществляют регулируемую передачу накопленной механической энергии на m осей n-осного прицепа. Вычисляют тормозное усилие для каждого из колес n-осного прицепа и передают на тормозной привод n-осного прицепа, в котором формируют управляющее воздействие с учетом текущего значения уровня накопленной механической энергии. Благодаря тому, что сформированное управляющее воздействие несет информацию о текущем значении уровня накопленной механической энергии, создается дополнительный крутящий момент на колесах n-осного прицепа при преодолении тяжелых участков дорог и трогании с места.
Устройство управления n-осным прицепом тягача, в котором реализуется патентуемый способ, схематично представлено на фиг. 1, где условно изображены n-осный прицеп 1 тягача (далее n-осный прицеп 1) и тягач 2. На осях 31-3n n-осного прицепа смонтированы колеса 41-4n с тормозными механизмами 51-5n колес n-осного прицепа (далее тормозные механизмы 51-5n).
n-Осный прицеп 1 включает тормозной привод 6, связанный с тормозными механизмами 51-5n, датчики 71-7n скорости вращения колес n-осного прицепа (далее датчики 71-7n скорости вращения колес прицепа) и блок 8 управления. Кроме того, n-осный прицеп 1 содержит m рекуператоров 91-9m механической энергии, закрепленных на m осях 31-3m n-осного прицепа, где m≤n, и контроллер 10.
Выбор числа осей m, на которых устанавливаются рекуператоры 91-9m механической энергии, определяется исходя из общей грузоподъемности прицепа 1 и предполагаемых условий его эксплуатации, а также мощности тягача 2, с которым он будет использоваться. Установка рекуператоров 91-9m механической энергии без учета указанных технических характеристик на все оси n прицепа 1 в общем случае нецелесообразна, так как может привести к необоснованному снижению общей надежности прицепа.
Тягач 2 содержит датчик 11 педали тормоза тягача, колеса 12 с тормозными механизмами 13, связанными с устройством 14 управления тормозной системой тягача, индикатор 15 зарядки рекуператоров механической энергии, регулятор 16 разрядки рекуператоров механической энергии и датчик 17 скорости вращения колес тягача. Датчик 11 педали тормоза совместно с тормозными механизмами 13 и устройством 14 управления тормозной системой образует тормозную систему тягача.
Под термином «зарядка» рекуператоров 91-9m механической энергии понимается накопление механической энергии, а под термином «разрядка» рекуператоров 91-9m механической энергии понимается расходование механической энергии.
К одним входам контроллера 10 подключены датчик 17 скорости вращения колес тягача, регулятор 16 разрядки рекуператоров механической энергии и датчик 11 педали тормоза тягача. К другим входам контроллера 10, являющихся информационными входами, подключены датчики 71-7n скорости вращения колес прицепа и выходы рекуператоров 91-9m механической энергии. Выходы контроллера 10 подключены к управляющим входам соответствующих рекуператоров 91-9m механической энергии, индикатору 15 зарядки рекуператоров механической энергии и управляющим входам блока 8 управления.
К другим входам блока 8 управления подключены датчик 11 педали тормоза тягача, датчики 71-7n скорости вращения колес прицепа и индикатор 15 зарядки рекуператоров механической энергии. Выходы блока 8 управления подключены к тормозному приводу 6, вход которого соединен с устройством 14 управления тормозной системой тягача. Выходы тормозного привода 6 подключены к тормозным механизмам 51-5n соответствующих колес 41-4n прицепа.
В описываемом варианте осуществления изобретения каждый из рекуператоров 91-9m механической энергии представляет собой пружинный рекуператор, далее по тексту для удобства изложения пружинный рекуператор 91-9m. Каждый пружинный рекуператор 91-9m содержит вал 18 (фиг. 2), установленный на оси 3 прицепа в подшипниках 19, с жестко закрепленным на нем входным фланцем 20, барабан 21 с жестко закрепленным на нем выходным фланцем 22, установленный на валу 18 в подшипниках 19, пружину 23, один конец которой жестко закреплен на валу 18, а другой конец - на барабане 21, электромагнитную муфту 24 с храповым механизмом, одна из полумуфт которой жестко соединена с входным фланцем 20, а вторая закреплена на оси 3 с возможностью осевого перемещения, регулируемый привод 25 с управляемым фиксатором положения барабана, кинематический вход которого жестко соединен с выходным фланцем 22, обгонную муфту 26, одна из полумуфт которой жестко соединена с кинематическим выходом регулируемого привода 25, а вторая закреплена на оси 3, и датчики 27 числа оборотов входного и выходного фланцев.
Датчики числа 27 оборотов входного и выходного фланцев подключены к информационным входам контроллера 10 (фиг. 1), к управляющим выходам которого подключены вход электромагнитной муфты 24 с храповым механизмом, первый и второй входы регулируемого привода 25 с фиксатором положения барабана.
Устройство управления n-осным прицепом тягача, в котором реализуется способ управления n-осным прицепом тягача, работает следующим образом. При движении тягача 2 с n-осным прицепом 1 в штатном режиме контроллер 10 по информации от датчиков 71-7n скорости вращения колес прицепа вычисляет требуемое тормозное усилие для каждого из колес 41-4n, направляя соответствующие сигналы на тормозной привод 6, который формирует и передает управляющее воздействие на соответствующие тормозные механизмы 51-5n. Это позволяет обеспечить устойчивое движение тягача 2 с n-осным прицепом 1 при наличии различных дестабилизирующих факторов.
При нажатии на педаль тормоза соответствующий сигнал поступает от тягача 2 в блок 8 управления и контроллер 10. При поступлении сигнала контроллер 10 формирует команду на зарядку пружинных рекуператоров 91-9m, при этом названная команда с первого управляющего выхода контроллера 10 поступает на электромагнитную муфту 24. Одновременно контроллер 10 формирует команду на блокировку вращения барабана 21; названная команда со второго управляющего выхода контроллера 10 подается на регулируемый привод 25. При срабатывании муфты 24 вал 18 соединяется с осью 3, при этом происходит закрутка пружины 23 в барабане 21. Информация о числе оборотов пружины 23 при зарядке пружинных рекуператоров 91-9m и числе оборотов раскрутки пружины 23 при разрядке пружинных рекуператоров 91-9m с датчиков 27 числа оборотов подается на информационные входы контроллера 10. По этим сигналам вычисляется уровень зарядки пружинных рекуператоров 91-9m, и при достижении заданного уровня с первого управляющего выхода контроллера 10 подается команда на зарядку пружинных рекуператоров 91-9m. При этом муфта 26 выключается, а ее храповой механизм удерживает пружину 23 посредством вала 18 от раскручивания. С первого информационного выхода контроллера 10 информация об уровне зарядки пружинных рекуператоров 91-9m подается на первый дополнительный информационный вход блока 8 управления и на индикатор 15 зарядки рекуператоров механической энергии, который находится в кабине водителя тягача 2. На второй дополнительный информационный вход блока 8 управления со второго информационного выхода контроллера 10 подается сигнал о включении или выключении режима зарядки пружинных рекуператоров 91-9m.
В режиме торможения блок 8 управления формирует управляющие сигналы для тормозного привода 6 с учетом:
- величины сигнала, поступающего с датчика 11 педали тормоза тягача;
- величины сигнала об уровне зарядки пружинных рекуператоров 91-9m, поступающего с индикатора 15 зарядки рекуператоров механической энергии, причем тормозное усилие со стороны пружинных рекуператоров 91-9m увеличивается по мере их зарядки;
- величины сигнала о включении или выключении режима зарядки пружинных рекуператоров 91-9m, поступающего с регулятора 16 разрядки рекуператоров механической энергии;
- величины сигналов с датчиков 71-7n скорости вращения колес прицепа.
При трогании с места или при движении на тяжелых участках дороги водитель тягача 2 включает режим разрядки пружинных рекуператоров 91-9m, при этом соответствующий сигнал поступает на второй управляющий вход контроллера 10. В соответствии с этим сигналом контроллер 10 формирует команду на разблокировку барабана 21, которая поступает через второй управляющий выход на регулируемый привод 25, а также формирует управляющий сигнал для установки передаточного отношения регулируемого привода 25 и, как следствие, - крутящего момента соответствующих колес 41-4n прицепа. При этом величина управляющего сигнала, формируемого контроллером 10, определяется величиной сигнала, поступающего на его второй управляющий вход, и соотношением сигналов, поступающих с датчика 17 скорости вращения колес тягача и датчиков 71-7n скорости вращения колес прицепа. Это позволяет исключить «наезд» n-осного прицепа 1 на тягач 2 с последующей потерей устойчивости движения.
При выключении режима разрядки пружинных рекуператоров 91-9m контроллер 10 формирует команду на блокировку вращения барабана 21, которая поступает через второй управляющий выход на регулируемый привод 25. В этом случае степень закручивания пружины 21 остается в некотором промежуточном состоянии до момента следующего торможения, когда будет обеспечена ее полная зарядка в соответствии с описанным выше алгоритмом. В случае полной разрядки пружины 21 обгонная муфта 26 обеспечивает отключение регулируемого привода 25 от оси 3.
Используя информацию с индикаторов 15 зарядки рекуператоров механической энергии, водитель тягача 2 перед тяжелым участком дороги или перед заездом на стоянку может произвести несколько циклов торможения для обеспечения полной зарядки пружинных рекуператоров 91-9m.
Регулируемый привод 25 может быть выполнен в виде совокупности тормозной камеры (блокировка барабана 21 на корпус) и различных модификаций вариатора (изменение передаточного числа).
Датчики 27 числа оборотов могут быть выполнены аналогично типовым датчикам скорости вращения колес.
Пружинные рекуператоры 91-9m могут быть выполнены с использованием как плоских спиральных пружин, так и пружин скручивания или сжатия, что позволяет увеличить величину запасаемой энергии.
Предложенный способ и устройство управления n-осного тягача позволяют обеспечить улучшение динамики управления за счет использования энергии рекуперативного торможения при преодолении тяжелых участков дорог и трогании с места. При этом снижается расход топлива, повышается срок службы двигателя тягача, улучшается экологичность из-за снижения объема выхлопных газов, повышается срок эксплуатации тормозных колодок колес тягача и n-осного прицепа, так как энергия торможения в значительной степени поглощается пружинными рекуператорами с последующим полезным использованием.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЗЕЛ ДВЕРНОЙ РУЧКИ | 2016 |
|
RU2616907C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ | 2016 |
|
RU2623598C1 |
| Вспомогательное маневрирующее устройство | 2019 |
|
RU2718476C1 |
| Устройство управления турбонаддувом двигателя внутреннего сгорания | 2017 |
|
RU2635425C1 |
| УСТРОЙСТВО УПРАВЛЯЕМОГО ТУРБОНАДДУВА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2016 |
|
RU2612538C1 |
| Устройство управляемого турбонаддува двигателя внутреннего сгорания | 2016 |
|
RU2636362C1 |
| Устройство турбонаддува двигателя внутреннего сгорания | 2017 |
|
RU2649714C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛНОПРИВОДНЫМ ЭЛЕКТРОМОБИЛЕМ | 2019 |
|
RU2707429C1 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ | 2003 |
|
RU2264307C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРИЦЕПОМ С ПРИВОДОМ И ПРИЦЕП С ПРИВОДОМ ОТ ЭЛЕКТРОДВИГАТЕЛЯ | 2017 |
|
RU2724568C2 |
Изобретение относится к управлению транспортными средствами с прицепами. В способе управления n-осным прицепом тягача определяют скорость вращения колес прицепа, передают ее в блок управления, в который также передают сигналы от тормозной системы тягача. Вычисляют тормозное усилие для каждого из колес прицепа, которое передают на тормозной привод прицепа. Формируют управляющее воздействие и направляют его на соответствующие тормоза прицепа. При торможении производят накопление механической энергии на m осях n-осного прицепа, где m≤n. При движении передают накопленную механическую энергию на m осей. Торможение осуществляют с учетом текущего значения уровня накопленной механической энергии. Устройство для реализации способа содержит блок управления, датчик педали тормоза тягача и датчики скорости вращения колес прицепа и тягача, тормозные механизмы прицепа, рекуператоры механической энергии, закрепленные на m осях прицепа, индикатор и регулятор зарядки рекуператоров и контроллер. Улучшается динамика ТС. 2 н. и 2 з.п. ф-лы, 2 ил.
1. Способ управления n-осным прицепом тягача, заключающийся в том, что определяют скорость вращения колес n-осного прицепа, которую передают в блок управления, в который также передают сигналы от тормозной системы тягача, и вычисляют тормозное усилие для каждого из колес n-осного прицепа, которое передают на тормозной привод n-осного прицепа, в котором формируют управляющее воздействие и направляют на соответствующие тормоза n-осного прицепа, отличающийся тем, что при торможении производят накопление механической энергии на m осях n-осного прицепа, где m≤n, при движении осуществляют регулируемую передачу накопленной механической энергии на m осей n-осного прицепа, а управление тормозами n-осного прицепа осуществляют с учетом текущего значения уровня накопленной механической энергии.
2. Устройство управления n-осным прицепом тягача, содержащее блок управления, соответствующие входы которого подключены к датчику педали тормоза тягача и к датчикам скорости вращения колес n-осного прицепа, тормозной привод n-осного прицепа, вход которого соединен с устройством управления тормозной системой тягача, а выход подключен к тормозным механизмам, установленным на каждой оси n-осного прицепа, отличающееся тем, что дополнительно содержит m рекуператоров механической энергии, закрепленных на m осях n-осного прицепа, где m≤n, индикатор зарядки рекуператоров механической энергии, регулятор разрядки рекуператоров механической энергии, датчик скорости вращения колес тягача и контроллер, к одним входам которого подключены датчик скорости вращения колес тягача, регулятор разрядки рекуператоров механической энергии и датчик педали тормоза тягача, а ко вторым, являющимся информационными входами, подключены датчики скорости вращения колес n-осного прицепа и выходы рекуператоров механической энергии, при этом управляющие выходы контроллера подключены ко входам соответствующих рекуператоров механической энергии, дополнительным входам блока управления и индикатору зарядки рекуператоров механической энергии.
3. Устройство по п. 2, отличающееся тем, что каждый рекуператор механической энергии представляет собой пружинный рекуператор и содержит установленный на соответствующей оси прицепа вал с жестко закрепленным на нем входным фланцем, установленный на валу барабан с жестко закрепленным на нем выходным фланцем, пружину, один конец которой жестко закреплен на валу, а другой конец - на барабане, электромагнитную муфту с храповым механизмом, одна из полумуфт которой жестко соединена с входным фланцем, а вторая закреплена на оси прицепа с возможностью осевого перемещения, регулируемый привод с управляемым фиксатором положения барабана, кинематический вход которого жестко соединен с выходным фланцем, обгонную муфту, одна из полумуфт которой жестко соединена с кинематическим выходом регулируемого привода, а вторая закреплена на оси прицепа, и датчики числа оборотов входного и выходного фланцев.
4. Устройство по п. 3, отличающееся тем, что к информационным входам контроллера подключены датчики числа оборотов входного и выходного фланцев, к управляющим выходам которого подключены вход электромагнитной муфты с храповым механизмом, а также первый и второй входы регулируемого привода с фиксатором положения барабана.
| US 2008067862 A1, 20.03.2008 | |||
| US 2010151980 A1, 17.06.2010 | |||
| US 2015087476 A1, 26.03.2015 | |||
| МАХОВИК ПЕРЕМЕННОГО МОМЕНТА ИНЕРЦИИ | 2012 |
|
RU2509241C1 |
| РЕКУПЕРАТИВНЫЙ ТОРМОЗ | 2010 |
|
RU2439391C1 |

