Область техники, к которой относится изобретение
Настоящее изобретение относится к способу управления прицепом с приводом от электродвигателя, а также к такому прицепу с приводом от электродвигателя.
Уровень техники
Согласно уровню техники в прицепах используются динамометрические датчики, в частности, тензометры, которые измеряют силы, возникающие между прицепом и тягачом. Как известно, эти динамометрические датчики подвержены внешним влияниям, в частности, влияниям таких условий окружающей среды, как колебания температуры и влажности. Кроме того, соединение прицепа с тягачом, согласно уровню техники всегда жесткое, подвержено воздействию осевых и поперечных сил, возникающих между прицепом и тягачом. В частности, сильные вибрации могут привести к возникновению колебаний в системе прицеп-соединение-тягач, вплоть до резонансных. Следствием этого является большое количество измерений, производимых динамометрами, что, в свою очередь, приводит к высоким затратам на обработку данных в блоке управления. Кроме того, оказывается трудно отличить данные измерений, существенные для управления прицепом, от фоновых шумов, создаваемых вибрациями и другими помехами. Это, наряду с другими влияниями, снижает удобство езды и увеличивает энергопотребление.
В патентом документе US 2012/0037435 А1 раскрыт велосипедный прицеп с приводом от электродвигателя. Описанный в нем прицеп соединен с велосипедом тяговой штангой, причем тяговая штанга снабжена динамометром, а прицеп содержит двигатель. В зависимости от разности скоростей велосипеда и прицепа динамометр измеряет силу сжатия, когда прицеп движется быстрее велосипеда, или силу растяжения, когда прицеп отстает от велосипеда. Двигатель ускоряет прицеп соответственно силам, измеренным динамометром.
В патентом документе US 8 365 849 В2 раскрыта система буксировки прицепа. Прицеп содержит электродвигатель, тормоза, тяговую штангу и расположенный на тяговой штанге динамометр. В зависимости от измеренных динамометром механических сил, прицеп ускоряется двигателем или затормаживается тормозами.
В патентом документе DE 10 2010 051 838 А1 раскрыт велосипедный прицеп, содержащий электрическую машину, способную работать и как тормоз, и как двигатель, чтобы и при разгоне, и при торможении велосипеда избежать заметных реактивных воздействий прицепа на велосипед. Раскрыты различные датчики, позволяющие достичь этой цели. Так, например, предложены датчик давления на педали, датчик силы торможения, предусмотренный в тормозном рычаге, а также динамометр, расположенный в сцепке между прицепом и тягачом. Сигналы этих датчиков подаются на электронную логическую схему, которая, в свою очередь, управляет электрической машиной и/или тормозами. С помощью динамометра можно определить, воздействует ли велосипед на прицеп силой растяжения или силой сжатия, и в зависимости от сигналов измерений осуществляется управление двигателем или тормозами, чтобы прицеп следовал за велосипедом. В качестве альтернативы измерению сил предложена измерительная система с предварительным натягом, в которой либо манометр измеряет изменение давления в цилиндре, либо позиционный датчик измеряет положение подпружиненного диска. Хотя такие измерительные системы с предварительным натягом создают менее жесткую сцепку прицепа с велосипедом, но и в этом случае сохраняются мешающие, в частности, пульсирующие эффекты обратной связи.
В патентом документе DE 10 2006 009 862 А1 раскрыт велосипедный прицеп-толкатель для разгона и торможения велосипеда, причем на раме прицепа в качестве инертной массы закреплен аккумулятор, так что при торможении аккумулятор качается вперед, а при ускорении качается назад. Аккумулятор шарнирно соединен с позиционным датчиком фактического положения, а также с тросом Боудена. В процессе торможения электродвигатель переводится датчиком фактического положения в режим рекуперативного торможения, причем одновременно через трос Боудена активируется механический тормоз.
Раскрытие сущности изобретения
Вследствие вышесказанного в основу настоящего изобретения положена задача предложить возможно более простой и надежный способ буксировки прицепа тягачом, сохраняющий низкий уровень энергопотребления и повышающий удобство езды.
Указанная задача решена изобретением в соответствии с п.п. 1 и 8 формулы настоящего изобретения. Предпочтительные варианты осуществления изобретения раскрыты в зависимых пунктах формулы изобретения, в описании и на фигурах.
Согласно настоящему изобретению, способ управления прицепом с приводом от электродвигателя включает в себя следующие шаги:
- некоторое расстояние между прицепом и тягачом определяют в качестве нейтрального положения,
- измеряют отклонение расстояния между прицепом и тягачом от нейтрального положения и выдают это отклонение в качестве значение ухода,
- электрически задействуют торможение прицепа, если расстояние между прицепом и тягачом уменьшено относительно нейтрального положения по меньшей мере на некоторое первое значение ухода,
- механически задействуют торможение прицепа, если расстояние между прицепом и тягачом уменьшено относительно нейтрального положения по меньшей мере на некоторое второе значение ухода, причем второе значение ухода больше, чем первое значение ухода,
- ускоряют прицеп с помощью электродвигателя, если расстояние между прицепом и тягачом увеличено относительно нейтрального положения на некоторое третье значение ухода.
В соответствии со способом согласно настоящему изобретению некоторое расстояние между прицепом и тягачом определяют как нейтральное положение. После этого в процессе движения непрерывно или через определенные промежутки времени отслеживают расстояние между прицепом и тягачом, измеряют отклонение расстояния между прицепом и тягачом от нейтрального положения и выдают это отклонение как значение ухода. В зависимости от этого измеренного и выданного как значение ухода отклонения прицеп либо тормозят, либо ускоряют. Торможение осуществляют электрически и/или механически. Если расстояние между прицепом и тягачом уменьшилось, например, вследствие замедления тягача, то прицеп тормозят электрически включенным тормозом, пока расстояние между прицепом и тягачом уменьшено по меньшей мере на некоторое первое значение ухода, но меньше, чем на некоторое второе значение ухода. Эти первое и второе значения ухода могут выбираться произвольно, однако второе значение ухода больше, чем первое значение ухода. Если расстояние между прицепом и тягачом окажется уменьшенным настолько, что будет достигнуто или пройдено и второе значение ухода, прицеп тормозят механически включенным тормозом. Если расстояние между прицепом и тягачом увеличится относительно нейтрального положения по меньшей мере на некоторое третье значение ухода, то прицеп ускоряют электродвигателем. Увеличение расстояния между прицепом и тягачом может происходить, например, при ускорении тягача или при его подъеме в гору.
Расстояние между прицепом и тягачом это расстояние, измеряемое вдоль оси движения тягача, то есть осевое расстояние между некоторой осью тягача и некоторой осью прицепа.
Прицеп реагирует на движение тягача электрически и/или механически задействуемым торможением либо ускорением, в зависимости от отклонения расстояния между прицепом и тягачом относительно определенного ранее нейтрального положения. Таким образом, в конечном счете, нейтральное положение устанавливается в качестве опорной точки, на основании которой регулируется система прицепа и тягача. Механически задействуемые тормоза позволяют надежно тормозить прицеп даже при отказе или нештатной работе электрического привода тормозов. Однако механически задействуемое торможение, в принципе, может представлять собой гидравлически или пневматически задействуемое торможение. Существенна здесь независимость механически/гидравлически/пневматически задействуемого торможения от электрически задействуемого торможения. В способе согласно настоящему изобретению можно отказаться от динамометрических датчиков. Вместо них производятся измерения и регулировка расстояния между прицепом и тягачом с помощью измерения расстояния.
В одном из вариантов осуществления электрически задействуемое торможение прицепа может быть рекуперативным торможением. В частности, рекуперативное торможение может осуществляться электродвигателем. Для этого последний может эксплуатироваться в режиме генератора. Кроме того, в одном из вариантов осуществления электрически задействуемое торможение прицепа может быть плавным прямым торможением, а механически задействуемое торможение прицепа - резким прямым торможением, причем резкое прямое торможение имеет более крутое нарастание тормозящей силы в зависимости от отклонения осевого расстояния между прицепом и тягачом, чем плавное прямое торможение. То есть плавное торможение означает приложение меньшей тормозящей силы, чем при резком торможении. В частности, плавное либо резкое прямое торможение может осуществляться с помощью прямого тормоза. Обозначения «прямое торможение» и «прямой тормоз» в контексте настоящего описания используются для отличия от рекуперативного торможения электродвигателем, и их не следует понимать как ограничительные в плане конструкции тормозов. Таким образом, когда оказывается пройдено первое значение ухода, электрически включают торможение, которое, с одной стороны, может осуществляться рекуперативным торможением прицепа электродвигателем или, с другой стороны, может осуществляться плавным прямым торможением прицепа прямым тормозом. Возможно и одновременно осуществлять рекуперативное и плавное прямое торможение. Рекуперативное торможение также может быть плавным. Когда при уменьшающемся расстоянии между прицепом и тягачом достигается некоторое второе значение ухода, механически включают прямой тормоз. Это происходит резко, то есть с более круто нарастающей тормозящей силой, чем при плавном прямом торможении. Когда оказывается пройдено второе значение ухода, дополнительно может также продолжаться рекуперативное торможение.
В одном из предпочтительных вариантов осуществления энергия, регенерированная при рекуперативном торможении, может направляться в накопитель энергии. Эта регенерированная энергия торможения может направляться в электрический накопитель энергии, например в аккумулятор или суперконденсатор. Электродвигатель в этом случае может работать как генератор. Регенерированная энергия торможения может также направляться в механический накопитель энергии, например, передаваться маховику. Накопитель энергии может располагаться на прицепе или в прицепе. В частности, и электродвигатель может в процессе движения запитываться от накопителя энергии. Благодаря рекуперации может быть увеличен пробег прицепа без внешней подзарядки накопителя энергии.
Когда оказывается пройдено первое значение ухода, тормозная сила электрически задействуемого торможения, предпочтительно, тем больше, чем меньше расстояние между прицепом и тягачом. Таким же образом, когда оказывается пройдено второе значение ухода, тормозная сила механически задействуемого торможения, предпочтительно, тем больше, чем меньше расстояние между прицепом и тягачом. Благодаря этому действующая на прицеп тормозная сила будет тем больше, чем меньше будет расстояние между прицепом и тягачом. Кроме того, когда оказывается пройдено третье значение ухода, предпочтительно, чтобы прицеп ускорялся тем быстрее, чем больше расстояние между прицепом и тягачом. Электрически задействуемое торможение, и/или механически задействуемое торможение, и/или ускорение прицепа может быть пропорционально, в частности линейно пропорционально или экспоненциально пропорционально, отклонению осевого расстояния между прицепом и тягачом от нейтрального положения. Благодаря этому обеспечивается максимально быстрая реакционная подстроечная регулировка положения прицепа относительно положения тягача.
В одном из вариантов осуществления может быть предусмотрен велосипед в качестве тягача и/или велосипедная тележка в качестве прицепа.
В одном из дальнейших вариантов осуществления электрически задействуемое торможение может заканчиваться, когда расстояние между прицепом и тягачом окажется уменьшенным относительно нейтрального положения на некоторое четвертое значение ухода, которое меньше, чем первое значение ухода. Согласно настоящему изобретению, когда оказывается пройдено первое значение ухода, электрически задействуют торможение прицепа. Если в результате электрически задействуемого торможения расстояние между прицепом и тягачом снова приблизится к нейтральному положению, электрически задействуемое торможение прицепа прекращают после достижения четвертого значения ухода, которое меньше, чем первое значение ухода. Таким образом, электрически задействуемое торможение прицепа может быть закончено еще до достижения нейтрального положения. Далее, механически задействуемое торможение предпочтительно может заканчиваться, а электрически задействуемое начинаться или продолжаться, когда расстояние между прицепом и тягачом окажется уменьшенным относительно нейтрального положения на некоторое пятое значение ухода, которое меньше, чем второе значение ухода, но больше, чем четвертое значение ухода. В частности, пятое значение ухода может быть и больше, чем первое значение ухода. Таким образом, исходя из нейтрального положения, как только расстояние между прицепом и тягачом достигает первого значения ухода, начинается электрически задействуемое торможение. Если расстояние между прицепом и тягачом уменьшается далее, так что оказывается пройдено второе значение ухода, то осуществляется, дополнительно или исключительно, механически задействуемое торможение. Если в результате механического или, при необходимости, дополнительного электрически задействуемого торможения расстояние между прицепом и тягачом снова приблизится к нейтральному положению, то после достижения пятого значения ухода, которое меньше, чем второе значение ухода, механически задействуемое торможение прекращают. Когда это расстояние окажется уменьшенным на величину, которая меньше пятого значения ухода, но больше четвертого значения ухода, осуществляется только электрически задействуемое торможение. При дальнейшем приближении расстояния между прицепом и тягачом к нейтральному положению прицеп, как только будет пройдено четвертое значение ухода, больше не тормозится. Если расстояние между прицепом и тягачом отклонится в другую сторону, по меньшей мере настолько, что увеличение этого расстояния достигнет третьего значения ухода, то, согласно настоящему изобретению, прицеп ускоряют. Предпочтительно, ускорение прицепа заканчивается, когда расстояние между прицепом и тягачом окажется увеличенным относительно нейтрального положения на некоторое шестое значение ухода, которое меньше, чем третье значение ухода. Таким образом, когда расстояние между прицепом и тягачом увеличивается, прицеп ускоряют, чтобы это расстояние снова приблизилось к нейтральному положению. В частности, прицеп ускоряют до тех пор, пока это расстояние не преодолеет шестого значения ухода. Таким образом, четвертое и шестое значения ухода определяют полосу мертвой зоны, в которой даже при отклонении расстояния между прицепом и тягачом от нейтрального положения не производится ни ускорения, ни торможения. Тем самым определен некоторый интервал допустимых колебаний расстояния между прицепом и тягачом, и в этом интервале не производится подгоночная регулировка. Пятое значение ухода является границей диапазона, в котором производится только электрически задействуемое торможение.
В одном из предпочтительных вариантов осуществления нейтральное положение может быть определено таким образом, что при нем прицеп следует за тягачом, не создавая нагрузки. Для этого путем целенаправленного электрически или механически задействуемого торможения или ускорения прицепа компенсируется его собственный вес, а также вес груза, если таковой находится в прицепе. При таком типе эксплуатации (в режиме следования) тягач, по существу, не ощущает нагрузки. В одном из дальнейших вариантов осуществления нейтральное положение может быть определено таким образом, что при нем прицеп толкает тягач. Для этого нейтральное положение определяют так, чтобы прицеп воздействовал на тягач в осевом направлении предпочтительно постоянной подталкивающей силой. Благодаря этому тягач при таком типе эксплуатации (в режиме подталкивания) может быть разгружен, в частности, на крутом подъеме.
В одном из вариантов осуществления способ включает в себя, далее, шаг, на котором измеряют скорость прицепа. Посредством измерения скорости можно электрически или механически задействовать торможение прицепа, когда его скорость превышает некоторое максимальное значение. В частности, можно осуществлять рекуперативное торможение прицепа электродвигателем или плавное либо резкое торможение прямым тормозом. Предпочтительно производят прямое торможение. В этом случае можно гарантировать, что тягач и прицеп не превысят определенную максимальную скорость, в частности, на крутом спуске. Прицеп может тормозиться прямым тормозом, что снижает скорость и тягача.
В одном из дальнейших вариантов осуществления предлагаемый способ отличается тем, что скорость прицепа поддерживают, если толкают небуксируемый прицеп. То есть если прицеп не связан с тягачом, например, если человек толкает прицеп вручную, электродвигатель может приводить прицеп таким образом, что последний сохраняет определенную скорость, так что человек, толкающий прицеп, по существу, не ощущает никакой нагрузки - или ощущает очень малую нагрузку. Если прицеп эксплуатируют в таком автономном режиме, для торможения на прицепе должен быть предусмотрен ручной тормоз. Предпочтительно, ручное торможение задействует прямой тормоз на прицепе. Предпочтительно, ручной тормоз может срабатывать автоматически, если человек отпускает прицеп. Кроме того, предпочтительно прицеп может автоматически тормозиться при превышении определенной скорости.
Далее, задача настоящего изобретения решена прицепом, приводимым электродвигателем и содержащим:
- по меньшей мере одно колесо,
- электродвигатель для привода по меньшей мере одного колеса,
- по меньшей мере один накопитель энергии для снабжения энергией электродвигателя,
- дышло для соединения прицепа с тягачом,
- сенсорный блок на дышле, выполненный с возможностью измерения возникающих отклонений расстояния между прицепом и тягачом от нейтрального положения и генерирования электрического сигнала измерения, соответствующего отклонению расстояния,
- реагирующий на электрический сигнал измерения блок управления, выполненный с возможностью торможения прицепа в ответ на электрический сигнал измерения, если расстояние между прицепом и тягачом уменьшено относительно нейтрального положения по меньшей мере на некоторое первое значение ухода, и с возможностью управления электродвигателем в ответ на электрический сигнал измерения сенсорного блока для ускорения прицепа, если расстояние между прицепом и тягачом увеличено относительно нейтрального положения на некоторое третье значение ухода,
- механическое исполнительное устройство, выполненное с возможностью торможения прицепа в ответ на отклонение расстояния, если расстояние между прицепом и тягачом уменьшено относительно нейтрального положения по меньшей мере на некоторое второе значение ухода, причем второе значение ухода больше, чем первое значение ухода.
Соответствующий настоящему изобретению прицеп с приводом от электродвигателя приспособлен для осуществления способа согласно настоящему изобретению. Дышло соединяет прицеп с тягачом. Расположенный в дышле или на нем сенсорный блок измеряет возникающие текущие отклонения осевого расстояния между прицепом и тягачом от нейтрального положения. Далее, сенсорный блок генерирует электрический сигнал измерения, соответствующий упомянутому отклонению расстояния, например, электрическое напряжение. В частности, этот электрический сигнал измерения может быть пропорционален, например линейно пропорционален или экспоненциально пропорционален, отклонению расстояния между прицепом и тягачом от нейтрального положения. Таким образом, сигнал измерения содержит информацию о масштабе или величине отклонения расстояния между прицепом и тягачом, а также о направлении этого отклонения вдоль оси, соединяющей прицеп с тягачом, то есть, в частности, о том, уменьшается или увеличивается расстояние между прицепом и тягачом относительно некоторого нейтрального положения. И в зависимости от того, увеличивается или уменьшается расстояние между прицепом и тягачом, электрический сигнал измерения может, например, иметь противоположные знаки, в частности, электрический сигнал измерения может быть положительным при увеличении расстояния между прицепом и тягачом относительно нейтрального положения и отрицательным при уменьшении этого расстояния относительно нейтрального положения. Кроме того, в зависимости от отклонения этого расстояния, например в зависимости от уменьшения расстояния между прицепом и тягачом, прицеп может тормозиться механическим исполнительным устройством. Таким образом, в дополнение к электрическому сигналу измерения, информация об отклонении расстояния генерируется также механическим исполнительным устройством. Применение прицепа согласно настоящему изобретению позволяет отказаться от динамометрических датчиков. Вместо них используется измерение расстояния между прицепом и тягачом и регулирование этого расстояния по результатам измерения.
Для этого блок управления при превышении первого значения ухода электрически включает торможение прицепа, которое, предпочтительно, с одной стороны, может быть рекуперативным торможением, или, с другой стороны, плавным прямым торможением прицепа. Возможно и одновременно осуществлять рекуперативное и плавное прямое торможение. Рекуперативное торможение также может быть плавным. Далее, если расстояние между прицепом и тягачом уменьшилось по меньшей мере на некоторое второе значение ухода, прицеп тормозится механическим исполнительным устройством. При этом второе значение ухода больше, чем первое значение ухода. Кроме того, когда уменьшение расстояния между прицепом и тягачом достигает второго значения ухода, механическим исполнительным устройством может быть механически включено тормозное устройство с прямым тормозом. Это может быть произведено резко, то есть с тормозной силой, нарастающей круче, чем при плавном прямом торможении. Как уже было упомянуто выше, обозначения «прямое торможение» и «прямой тормоз» выбраны для отличия от рекуперативного торможения электродвигателем и их не следует понимать как ограничительные в плане конструкции тормозов. Рекуперативное торможение может также продолжаться как дополнительное и тогда, когда оказывается пройдено второе значение ухода. Кроме того, блок управления выполнен для ускорения прицепа, когда расстояние между прицепом и тягачом увеличивается относительно нейтрального положения на некоторое третье значение ухода. Таким образом, как уже было разъяснено выше при раскрытии способа согласно настоящему изобретению, прицеп может реагировать на движение тягача, посредством рекуперативного или прямого торможения, если расстояние между прицепом и тягачом слишком уменьшается, и ускорения, если это расстояние слишком увеличивается.
В одном из вариантов осуществления срабатывающий на электрический сигнал измерения блок управления может быть выполнен с возможностью рекуперативного торможения прицепа и/или с возможностью плавного прямого торможения прицепа в ответ на электрический сигнал измерения. Кроме того, в одном из вариантов осуществления механическое исполнительное устройство может быть выполнено с возможностью резкого торможения прицепа в ответ на отклонение упомянутого расстояния. При этом резкое прямое торможение имеет более крутое нарастание тормозящей силы в зависимости от отклонения осевого расстояния между прицепом и тягачом, чем плавное прямое торможение. Таким образом, плавное торможение имеет более пологое нарастание зависимости тормозящей силы от отклонения расстояния, чем резкое торможение. В одном из дальнейших вариантов плавное либо резкое прямое торможение может осуществляться тормозным устройством с помощью прямого тормоза, а рекуперативное торможение - электродвигателем. Сенсорный блок электрическими сигналами измерения электрически управляет прямым тормозом тормозного устройства для плавного прямого торможения. Механическое исполнительное устройство механически управляет прямым тормозом тормозного устройства для резкого торможения. Для управления резким прямым торможением тормозное устройство непосредственно соединено с сенсорным блоком. Благодаря этому прямые тормоза позволяют осуществлять резкое прямое торможение даже при нештатной работе или отказе блока управления, например, при нарушении электроснабжения. Благодаря этому же, в частности, прямые тормоза обеспечивают особенно быструю реакцию.
Если используется электродвигатель, не обеспечивающий возможности рекуперативного торможения, то в ответ на электрический сигнал измерения блоком управления осуществляется только плавное прямое торможение. Если же электродвигатель обеспечивает возможность рекуперативного торможения, то в ответ на электрический сигнал измерения блоком управления осуществляется рекуперативное торможение, или плавное прямое торможение, или оба вида торможения одновременно. Обозначения «прямое торможение» и «прямой тормоз» в контексте настоящего описания выбраны для отличия от рекуперативного торможения электродвигателем и их не следует понимать как ограничительные в плане выбора тормозов. Прицеп может также содержать более одного колеса. В этом случае колеса в ответ на электрический сигнал измерения тормозятся блоком управления независимо друг от друга. К примеру, одно колесо может рекуперативно тормозиться размещенным на этом колесе электродвигателем, а второе колесо может плавно тормозиться прямым тормозом. Кроме того, прямое плавное торможение может осуществляться с приложением к колесам разных тормозящих сил. Это повышает устойчивость системы прицеп-тягач при поворотах, в частности, при поворотах на высокой скорости.
В одном из предпочтительных вариантов осуществления прицеп содержит, далее, устройство управления двигателем, соединенное по меньшей мере с блоком управления и электродвигателем. Предпочтительно, прицеп содержит, кроме того, накопитель энергии, например, аккумулятор, маховик или суперконденсатор для снабжения энергией электродвигателя. Таким образом, блок управления может передавать на устройство управления двигателем управляющие сигналы, которые, далее, управляют электродвигателем так, что прицеп ускоряется или рекуперативно тормозится. Кроме того, предпочтительно, далее, предусмотреть связанный с накопителем энергии, устройством управления двигателем и блоком управления регулятор мощности. Это позволяет с помощью регулятора мощности, а также устройства управления двигателем управлять энергией, подаваемой из накопителя в двигатель. Соответственно, регенерированная энергия торможения может с помощью устройства управления двигателем и регулятора мощности вновь направляться в накопитель энергии. Электродвигатель в этом случае может работать как генератор. Накопитель энергии может располагаться на прицепе или в прицепе. Благодаря рекуперации эксплуатация прицепа может осуществляться особенно энергоэффективно и может быть увеличен пробег прицепа, в частности, при использовании аккумулятора.
В одном из дальнейших вариантов осуществления прицеп содержит регулятор потребления для управления потребителями электроэнергии. В частности, регулятор потребления может быть соединен с регулятором мощности, если таковой имеется. При наличии регулятора потребления можно через него снабжать потребителей, например осветительный генератор, электроэнергией и/или управлять ими.
В одном из предпочтительных вариантов осуществления прицеп, далее, содержит датчик скорости, соединенный по меньшей мере с электродвигателем и блоком управления. Как уже было разъяснено выше при раскрытии предлагаемого способа, датчик скорости позволяет определить максимальную скорость, а также облегчает толкание прицепа в том случае, когда его не буксируют.
В одном из вариантов осуществления прицеп с приводом от электродвигателя может представлять собой велосипедный прицеп с приводом от электродвигателя, предназначенный для соединения с велосипедом в качестве тягача.
В одном из вариантов осуществления сенсорный блок прицепа содержит тяговую штангу для соединения с тягачом, корпус, средство соединения с прицепом, а также размещенный в корпусе датчик расстояния и отличается тем, что
- датчик расстояния выполнен с возможностью измерения отклонения расстояния между корпусом и тяговой штангой от некоторого нейтрального положения и
- датчик расстояния выполнен с возможностью генерирования первого электрического сигнала измерения, соответствующего отклонению расстояния, если расстояние между корпусом и тяговой штангой уменьшено относительно нейтрального положения по меньшей мере на некоторое первое значение ухода,
- при этом тяговая штанга выполнена с возможностью взаимодействия с механическим исполнительным устройством, выполненным с возможностью смещения соответственно отклонению расстояния, если расстояние между корпусом и тяговой штангой уменьшено относительно нейтрального положения по меньшей мере на некоторое второе значение ухода, причем второе значение ухода больше, чем первое значение ухода, и
- датчик расстояния выполнен с возможностью генерирования второго электрического сигнала измерения, соответствующего отклонению расстояния, если расстояние между корпусом и тяговой штангой увеличено относительно нейтрального положения на некоторое третье значение ухода.
Таким образом, если расстояние между корпусом и тяговой штангой уменьшено настолько, что оказывается достигнуто или превзойдено некоторое первое значения ухода, датчик расстояния генерирует соответствующий первый электрический сигнал измерения. Далее, если расстояние между корпусом и тяговой штангой увеличено, датчик расстояния генерирует второй электрический сигнал измерения. Эти электрические сигналы измерений соответствуют текущим отклонениям осевого расстояния, то есть несут информацию о масштабе отклонений расстояния. Первый и второй электрические сигналы измерений могут, в частности, отличаться противоположными знаками. Эти электрические сигналы измерений могут, например, представлять собой величины электрического напряжения. Если сенсорный блок соединен с тягачом и прицепом, то в ответ на первый электрический сигнал измерения может осуществляться электрическое торможение прицепа, а в ответ на второй электрический сигнал измерения - его ускорение. Электрическое торможение может быть рекуперативным торможением, осуществляемым электродвигателем прицепа, или оно может быть плавным прямым торможением, осуществляемым прямым тормозом. Далее, отклонение осевого расстояния между корпусом и тяговой штангой приводит к смещению механического исполнительного устройства, если расстояние между корпусом и тяговой штангой уменьшено относительно нейтрального положения по меньшей мере на некоторое второе значение ухода, причем второе значение ухода больше, чем первое значение ухода. Таким образом, когда оказывается достигнуто или превзойдено некоторое второе значения ухода, вместо генерирования первого электрического сигнала измерения - или в дополнение к нему - смещается механическое исполнительное устройство. Если сенсорный блок соединен с тягачом и прицепом, то смещением механического исполнительного устройства можно механически задействовать прямое торможение прицепа. Механически задействуемое торможение может, в частности, инициировать резкое прямое торможение. Резкое прямое торможение имеет более крутое нарастание тормозящей силы в зависимости от отклонения осевого расстояния между корпусом и тяговой штангой, - а значит, и между прицепом и тягачом, - чем плавное прямое торможение. В зависимости от первого, второго электрического сигнала измерения, а также смещения механического исполнительного устройства прицеп может реагировать на движение тягача торможением, если расстояние между корпусом и тяговой штангой, а следовательно, между прицепом и тягачом слишком сильно уменьшилось, и ускорением, когда расстояние между прицепом и тягачом слишком сильно увеличилось. Электрическим сигналом измерения, выданным датчиком расстояния, сенсорный блок может через электрический исполнительный механизм включить плавное прямое торможение. Блок управления соответствующего настоящему изобретению прицепа с приводом от электродвигателя может также представлять собой часть сенсорного блока согласно настоящему изобретению. Сенсорный блок согласно настоящему изобретению позволяет отказаться от динамометрических датчиков. Вместо них производятся измерение и регулировка расстояния между прицепом и тягачом по результатам измерения расстояния. В частности, соединение прицепа и тягача с ходовым зазором между корпусом и тяговой штангой может быть выполнено относительно гибким. В этом случае система прицеп-тягач менее восприимчива к поперечным силам, действующим между прицепом и тягачом.
В одном из предпочтительных вариантов осуществления датчик расстояния сенсорного блока содержит датчик угла поворота с сенсорным рычагом, и этот рычаг, закрепленный с возможностью вращения, смещается при осевом уходе тяговой штанги от нейтрального положения относительно корпуса. Таким образом можно преобразовать осевое движение тяговой штанги во вращательное движение сенсорного рычага. В частности, осевым движением тяговой штанги можно вращать сенсорный рычаг в противоположных направлениях, в зависимости от того, уменьшается или увеличивается осевое расстояние между корпусом и тяговой штангой относительно нейтрального положения. В зависимости от достигнутого при этом вращении углового положения сенсорного рычага, генерируется соответствующий отклонению осевого расстояния первый или второй электрический сигнал измерения. В одном из дальнейших вариантов осуществления тяговая штанга может содержать удлинитель с шипом, который вводится в прорезь сенсорного рычага сенсорного блока. Это позволяет особенно плавно преобразовывать осевое движение тяговой штанги во вращательное движение сенсорного рычага. Удлинитель с шипом для введения в прорезь сенсорного рычага также может быть предусмотрен на головке тяговой штанги, причем головка может располагаться на конце тяговой штанги, находящемся в корпусе. В одном из дальнейших вариантов осуществления сенсорный блок может содержать электрический исполнительный механизм, инициирующий плавное прямое торможение. В этом случае генерируемый датчиком угла поворота первый электрический сигнал измерения может управлять электрическим исполнительным механизмом, который, в свою очередь, через механическую буксирную сцепку инициирует плавное прямое торможение в зависимости от отклонения расстояния между корпусом и тяговой штангой.
Далее, в одном из предпочтительных вариантов осуществления исполнительного механизма сенсорного блока имеется пусковое коромысло, которое может отклоняться от положения покоя осевым движением тяговой штанги относительно корпуса. Благодаря этому, когда отклонение осевого расстояния между корпусом и тяговой штангой превышает второе значение ухода, закрепленное с возможностью вращения пусковое коромысло отклоняется от положения покоя. Если сенсорный блок соединен с тягачом и прицепом, прицеп может тормозиться соответственно этому отклонению пускового коромысла. В частности, при этом может осуществляться резкое торможение прицепа. В одном из дальнейших вариантов осуществления прицеп содержит возвратную пружину, которая возвращает пусковое коромысло назад в положение покоя, если тяговая штанга уже не отклоняет пусковое коромысло. Это обеспечивает постоянный возврат пускового коромысла в положение покоя и, таким образом, прекращение торможения, когда отклонение осевого расстояния между корпусом и тяговой штангой уже не превышает второе значение ухода.
В одном из предпочтительных вариантов осуществления исполнительный механизм содержит, далее, демпфирующий блок, который, противодействуя возвратной пружине, демпфирует возврат пускового коромысла в положения покоя, если тяговая штанга не отклоняет пусковое коромысло. Благодаря этому вызванное отклонением механического исполнительного устройства торможение постепенно вновь ослабляется, если тяговая штанга уже не отклоняет пусковое коромысло. Таким образом, окончание торможения оказывается постепенным и задемпфированным.
В одном из вариантов осуществления сенсорный блок может быть выполнен с возможностью измерения расстояния между велосипедным прицепом, в частности соответствующим настоящему изобретению велосипедным прицепом с приводом от электродвигателя, и велосипедом в качестве тягача.
В одном из вариантов осуществления сенсорный блок содержит корпус, выходящую из корпуса тяговую штангу для соединения с дышлом, причем тяговая штанга закреплена с возможностью смещения относительно корпуса, и датчик расстояния, выполненный с возможностью определения относительного расположения корпуса и тяговой штанги, при этом тяговая штанга в отсутствие механической возвращающей силы имеет возможность смещения в некотором нормальном диапазоне, причем этот нормальный диапазон выходит за пределы первого и третьего значений ухода. Таким образом, нормальный диапазон можно определить как диапазон штатной эксплуатации, в пределах которого возвращающая сила воздействует на тяговую штангу или на ее корпус только по электрическому сигналу измерения, т.е. в результате торможения или ускорения прицепа. В этом нормальном диапазоне, в частности, не происходит механического демпфирования, если не учитывать неизбежных потерь на трение. При этом тяговая штанга скользит сквозь корпус как бы без сопротивления (если не учитывать упомянутых потерь на трение). Такое, чисто электронное, регулирование очень точно. В частности, отсутствуют такие возмущения сцепки, как вибрации, поскольку тяговая штанга совершенно свободно расположена в корпусе через подвижный каркас. Благодаря этому можно, в частности, избежать негативных эффектов предварительно напряженной системы, которые могут приводить к пульсациям в сенсорном блоке. Поддержание такого диапазона штатной эксплуатации важно, поскольку на прицеп воздействует большое количество возникающих в процессе повседневной эксплуатации внешних возмущений, вызванных, например неровностями дороги, сменой предназначенных для транспортировки в прицепе грузов, меняющимися ветровыми условиями и особенностями водительского поведения пользователя. Для того чтобы обеспечить такое точное регулирование, важно точно знать положение электродвигателя. Для этого электродвигатель может быть снабжен датчиком поворота, способным прецизионно определять и передавать в блок управления текущее положение электродвигателя. Также может быть предусмотрена независимая подвеска колес прицепа для гашения вызванных неровностями дороги вибраций и осцилляций.
Нормальный диапазон может быть ограничен дальнейшими значениями ухода, например, в некотором направлении нормальный диапазон может быть ограничен вторым значением ухода. В частности, нормальный диапазон может быть пространственно ограничен двумя концевыми упорами. Эти концевые упоры могут быть выполнены, например, в виде двух пружин, причем первая пружина гасит движение тяговой штанги в некотором первом направлении, а вторая пружина - в некотором втором направлении. Таким образом, эти пружины создают механическую возвращающую силу, которая, однако, действует на тяговую штангу только вне нормального диапазона, т.е. при больших ускорениях или замедлениях. В нормальном диапазоне тяговая штанга с пружинами не контактирует.
В одном из дальнейших вариантов осуществления сенсорный блок задействует, далее, несколько связанных с тяговой штангой роликов, а также содержащие ролики и образующие часть корпуса направляющие элементы, причем тяговая штанга опирается на ролики с возможностью перемещения относительно направляющих элементов. При таком опирании потери на трение очень малы. Направляющие элементы могут располагаться с противоположных сторон тяговой штанги и вмещать расположенные по обе стороны тяговой штанги ролики. В частности, с каждой стороны тяговой штанги может быть предусмотрено по три ролика. С помощью нескольких роликов можно скомпенсировать силы и вращающие моменты, возникающие из-за наклона прицепа вперед в случае, когда центр тяжести прицепа, если смотреть со стороны велосипеда, расположен перед колесами прицепа.
В одном из дальнейших вариантов осуществления механическое исполнительное устройство содержит демпфирующий блок с демпферной штангой и захватом, соединенным с тяговой штангой, причем механическое исполнительное устройство тормозит прицеп за счет того, что захват, вследствие движения тяговой штанги, толкает демпферную штангу в демпфирующий блок. При движении с торможением тяговая штанга вдвигается в корпус и захватом увлекает с собой демпферную штангу демпфирующего блока. Такое решение конструктивно особенно просто. Кроме того, демпфирующий блок может постепенно отпускать механический тормоз, позволяя тем самым медленно уменьшать силу торможения.
Краткое описание чертежей
Ниже настоящее изобретение раскрыто более подробно на примере его осуществления со ссылкой на несколько сопроводительных фигур. На них представлены:
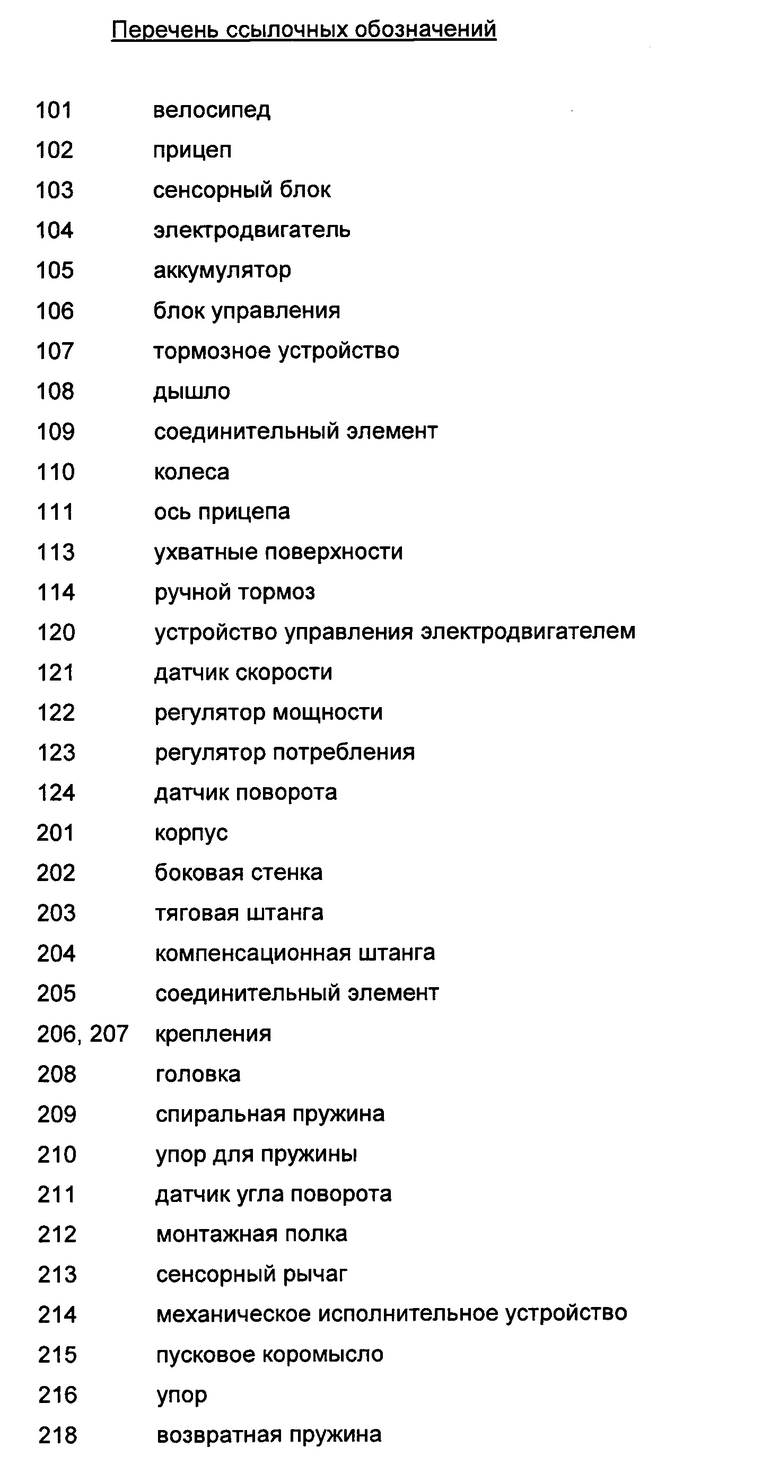
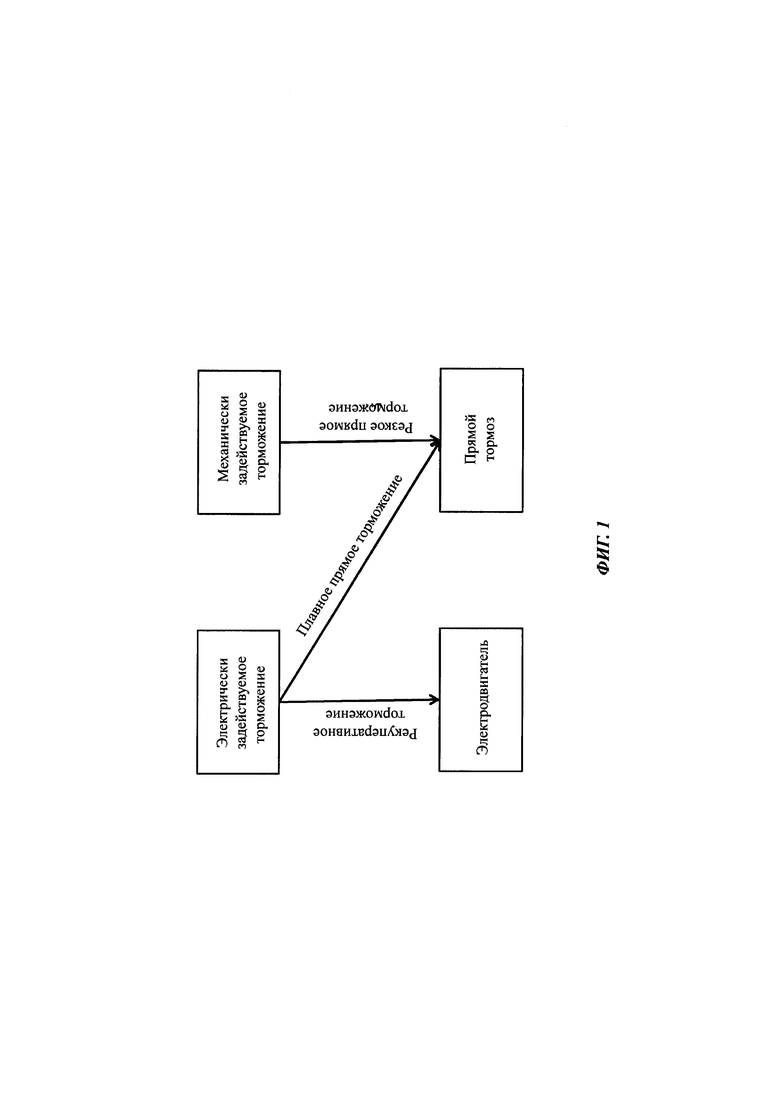
на ФИГ. 1 - схема различных видов торможений, задействованных электрически и механически,
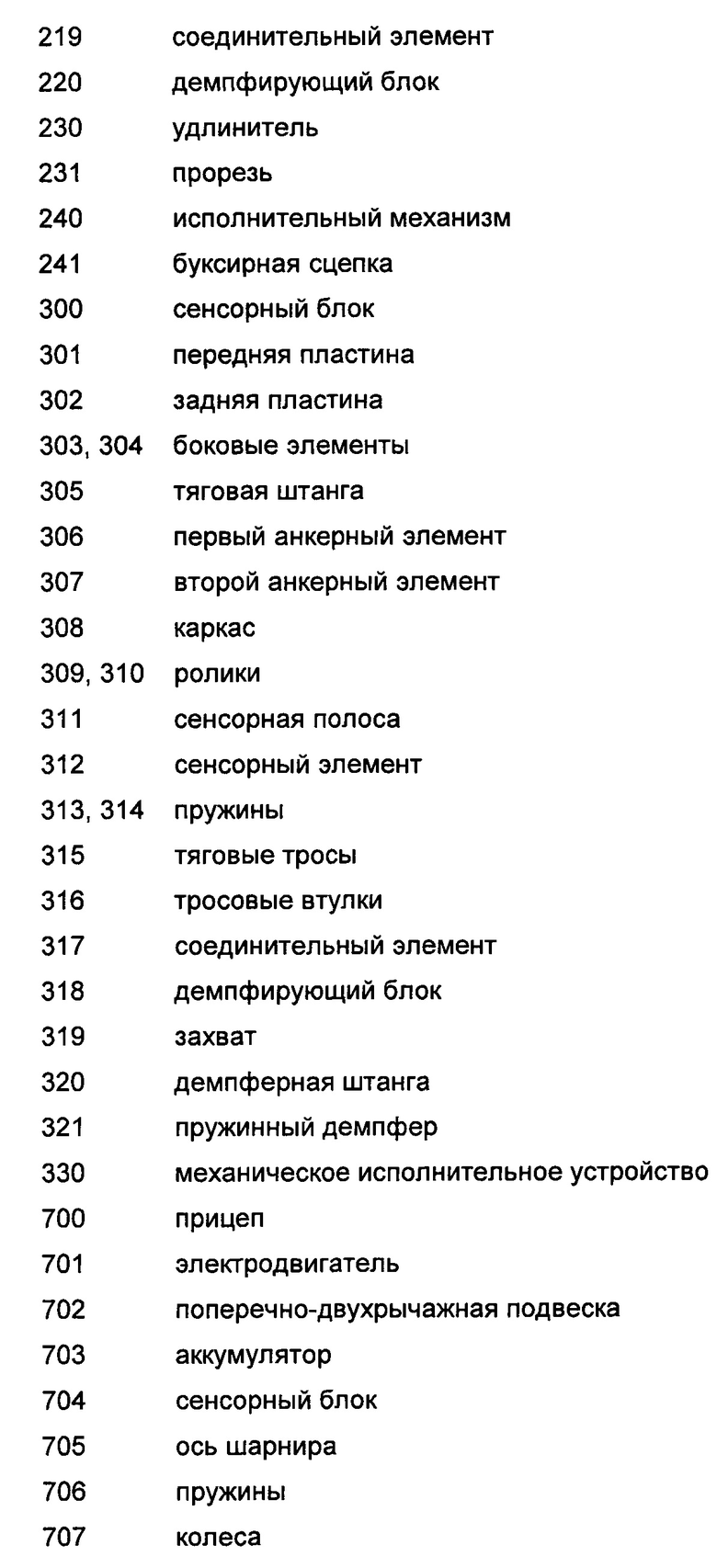
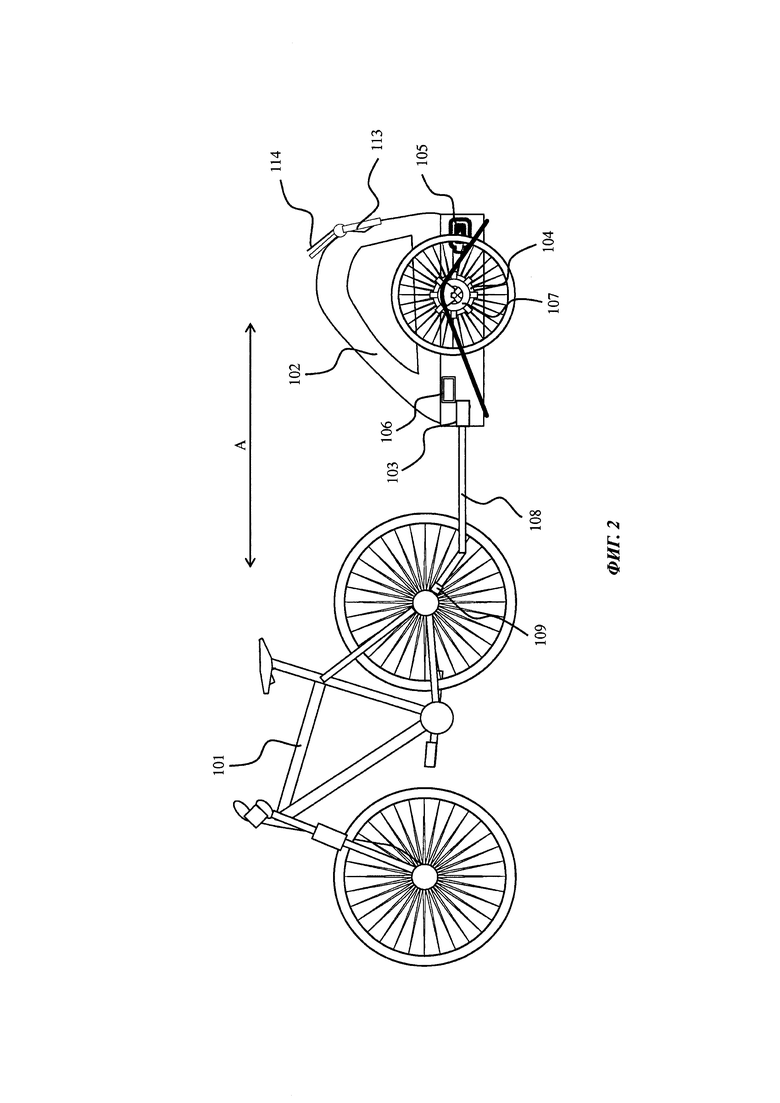
на ФИГ. 2 - соответствующий настоящему изобретению прицеп с приводом от электродвигателя и велосипед в качестве тягача,
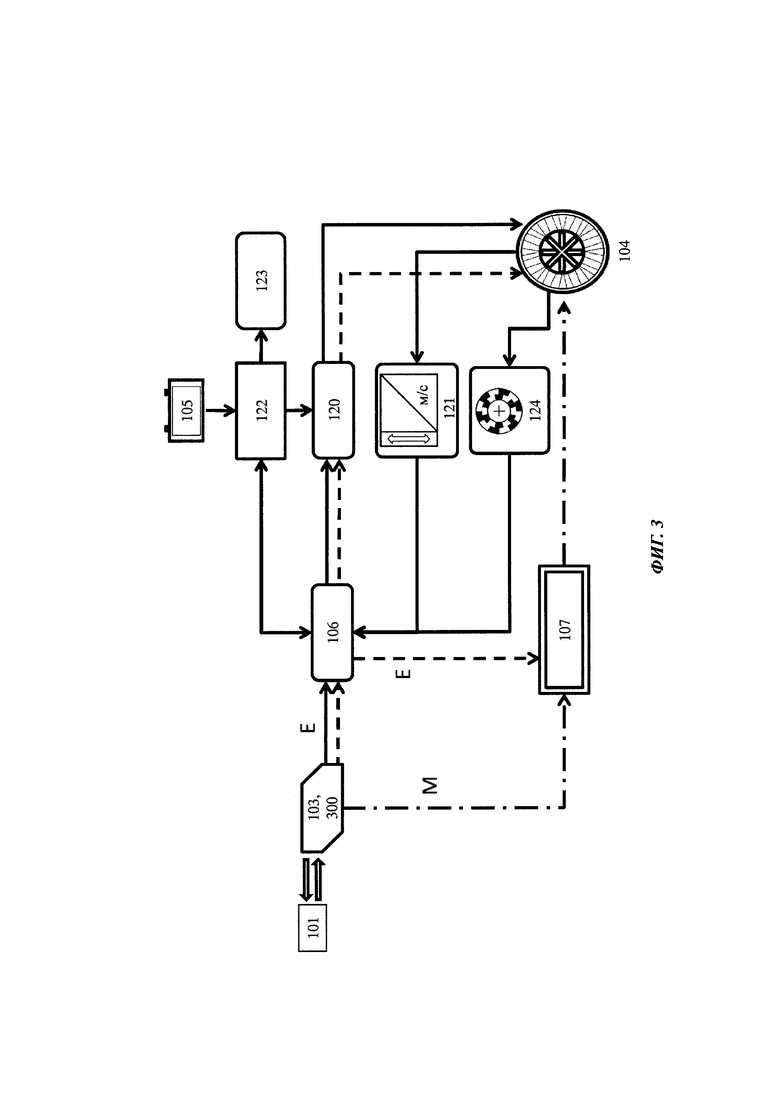
на ФИГ. 3 - схема способа согласно настоящему изобретению, в частности, для режимов следования и толкания,
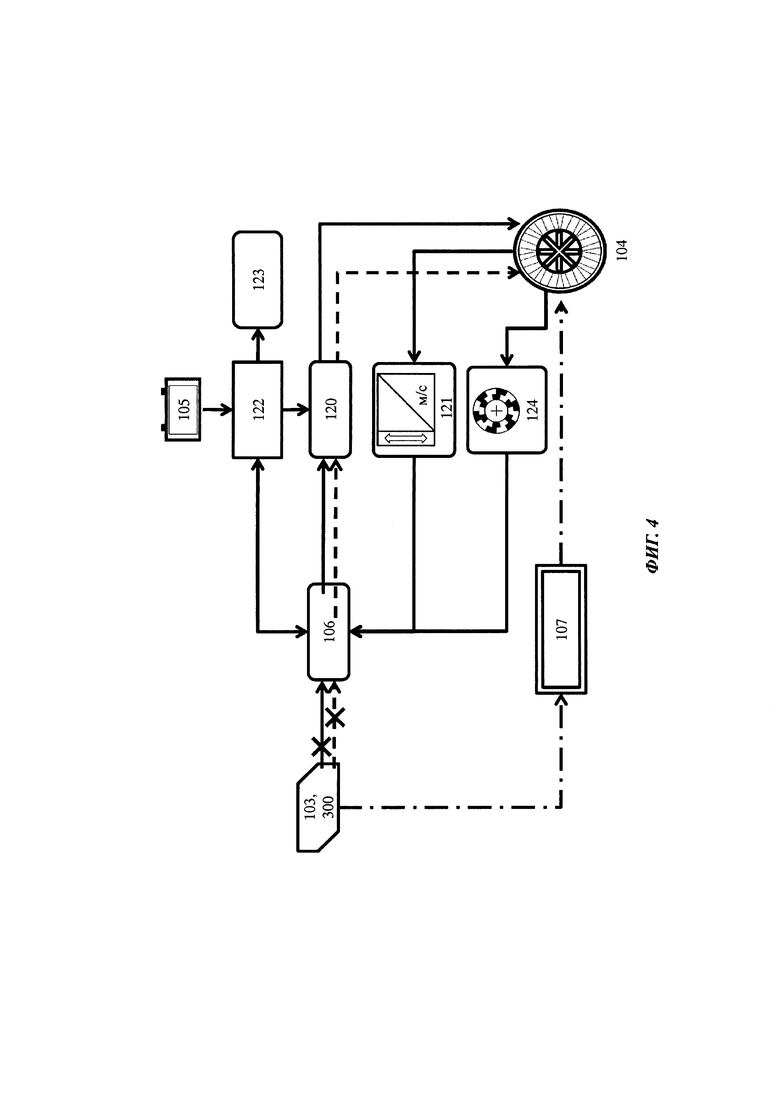
на ФИГ. 4 - также схема способа согласно настоящему изобретению, в частности, для автономного режима,
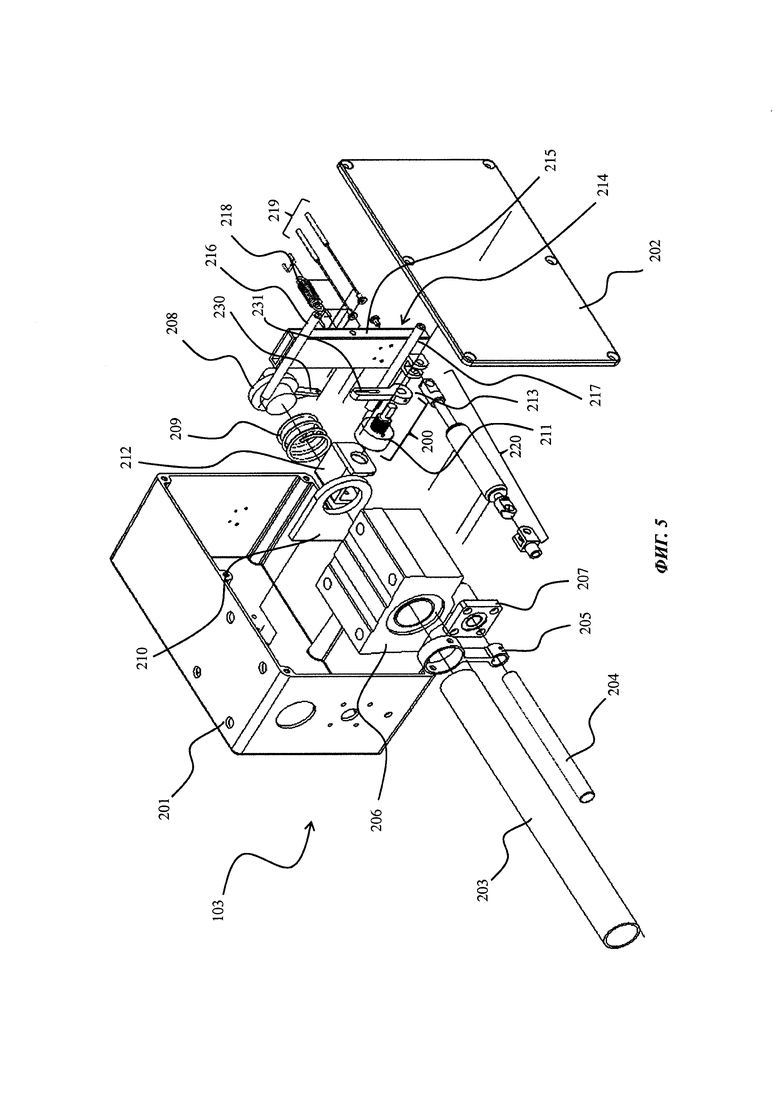
на ФИГ. 5 - разнесенный вид сенсорного блока согласно настоящему изобретению,
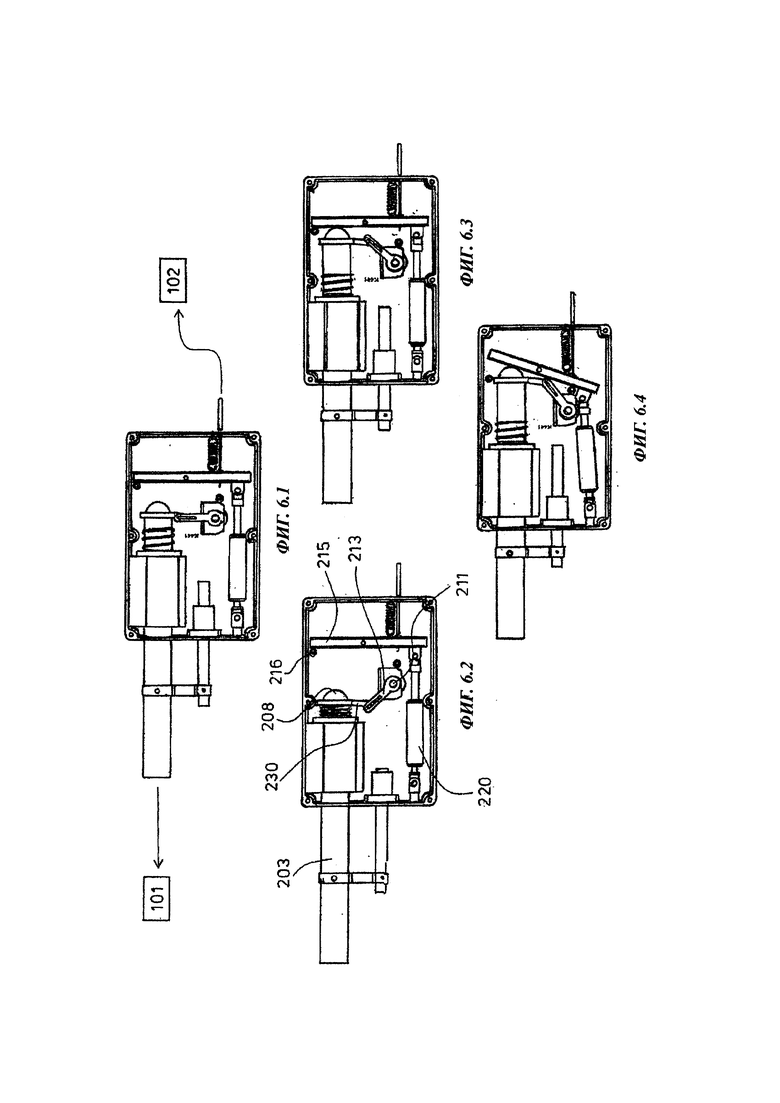
на ФИГ. 6.1-6.4 - различные отклонения сенсорного блока с ФИГ. 5,
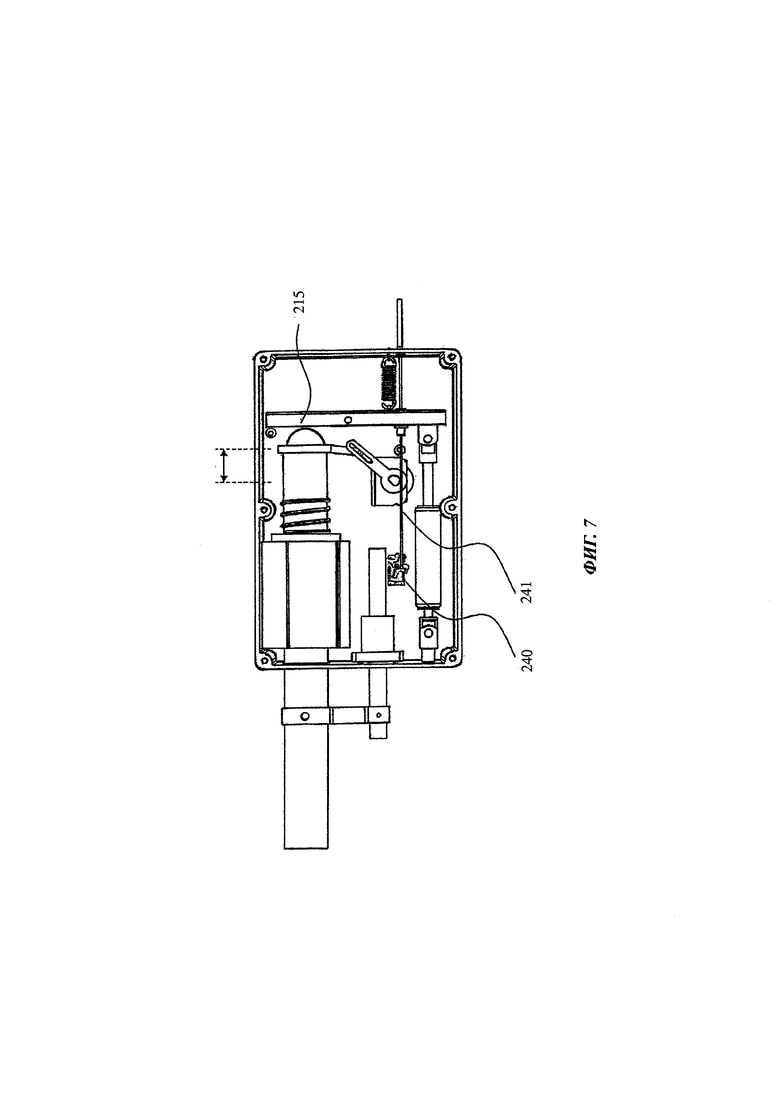
на ФИГ. 7 - еще одно изображение сенсорного блока с ФИГ. 5,
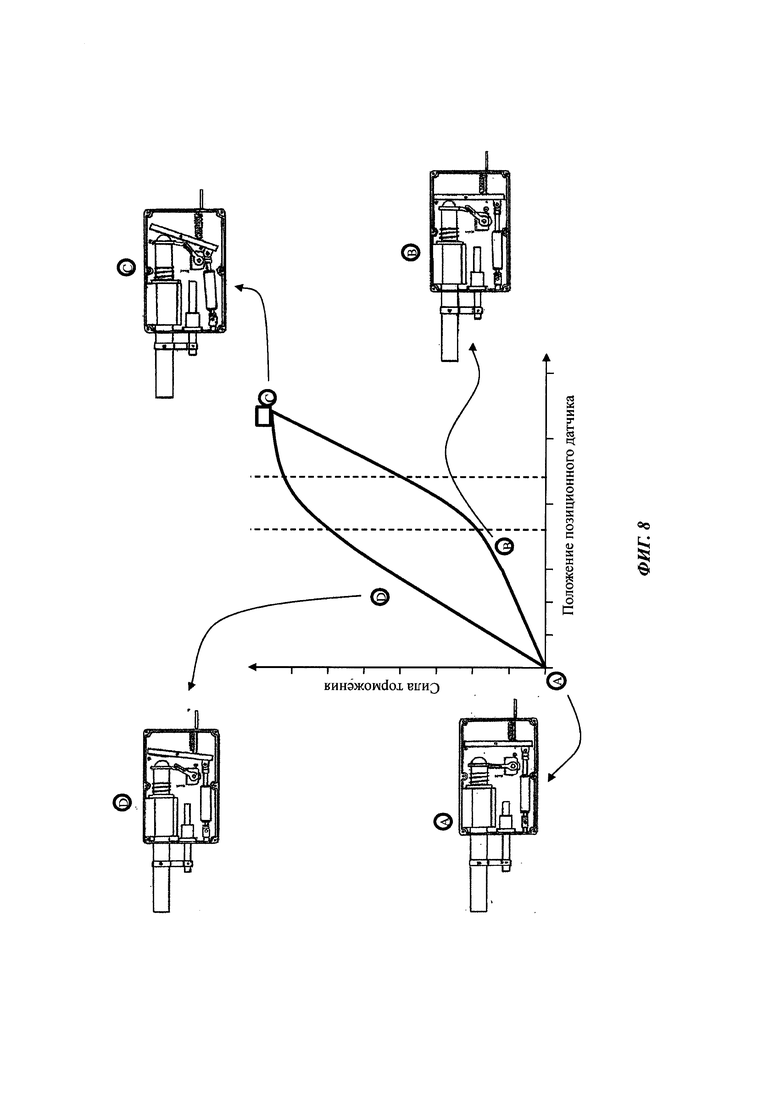
на ФИГ. 8 - схематическое изображение соответствующей различным отклонениям сенсорного блока с ФИГ. 5 кривой гистерезиса,
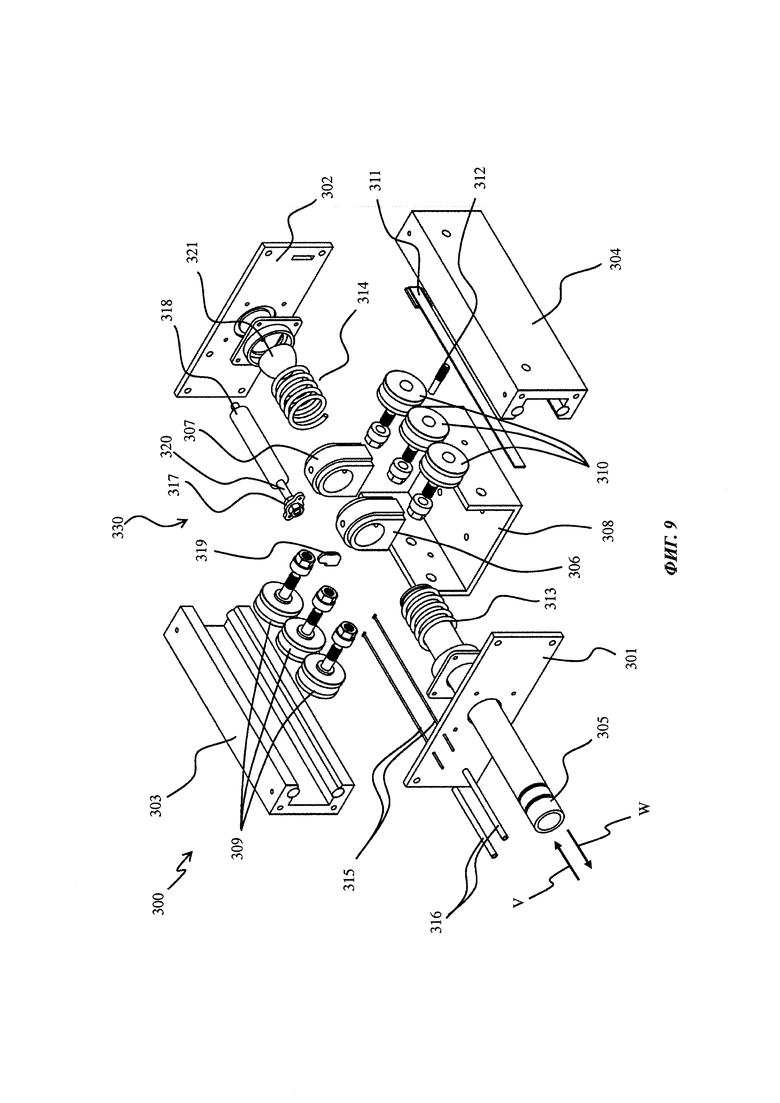
на ФИГ. 9 - разнесенный вид дальнейшего варианта осуществления сенсорного блока согласно настоящему изобретению,
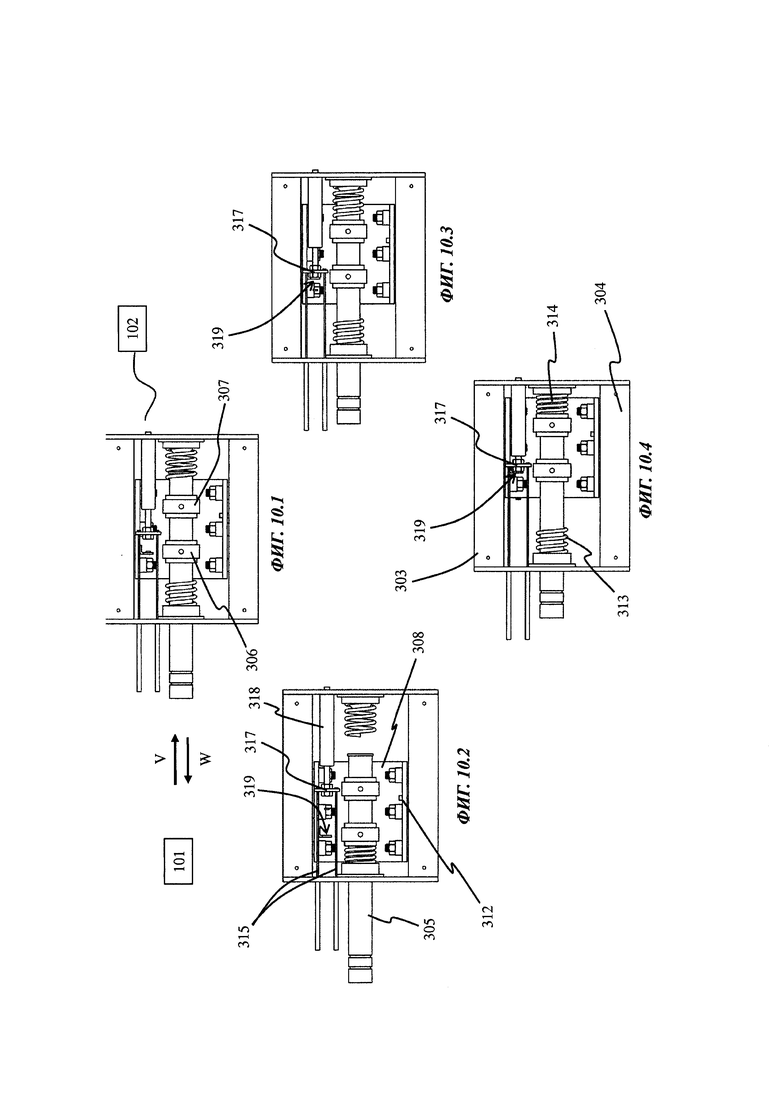
на ФИГ. 10.1-10.4 - различные отклонения сенсорного блока с ФИГ. 9,
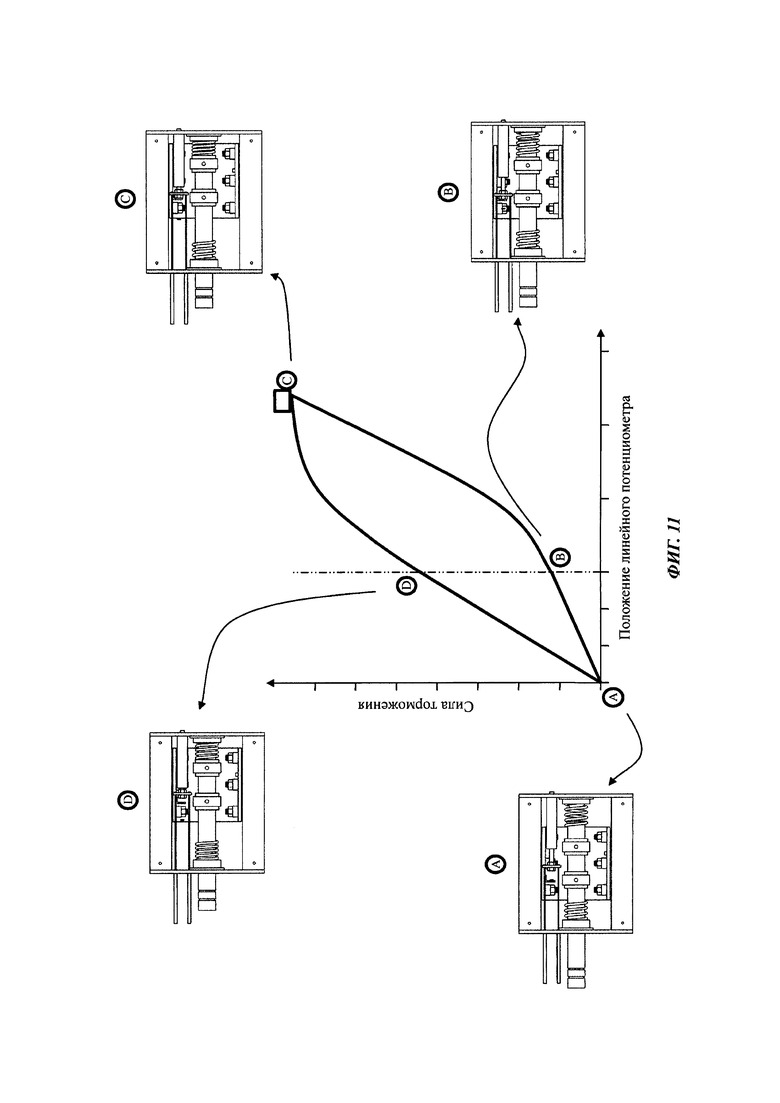
на ФИГ. 11 - схематическое изображение соответствующей различным отклонениям сенсорного блока с ФИГ. 9 кривой гистерезиса, и
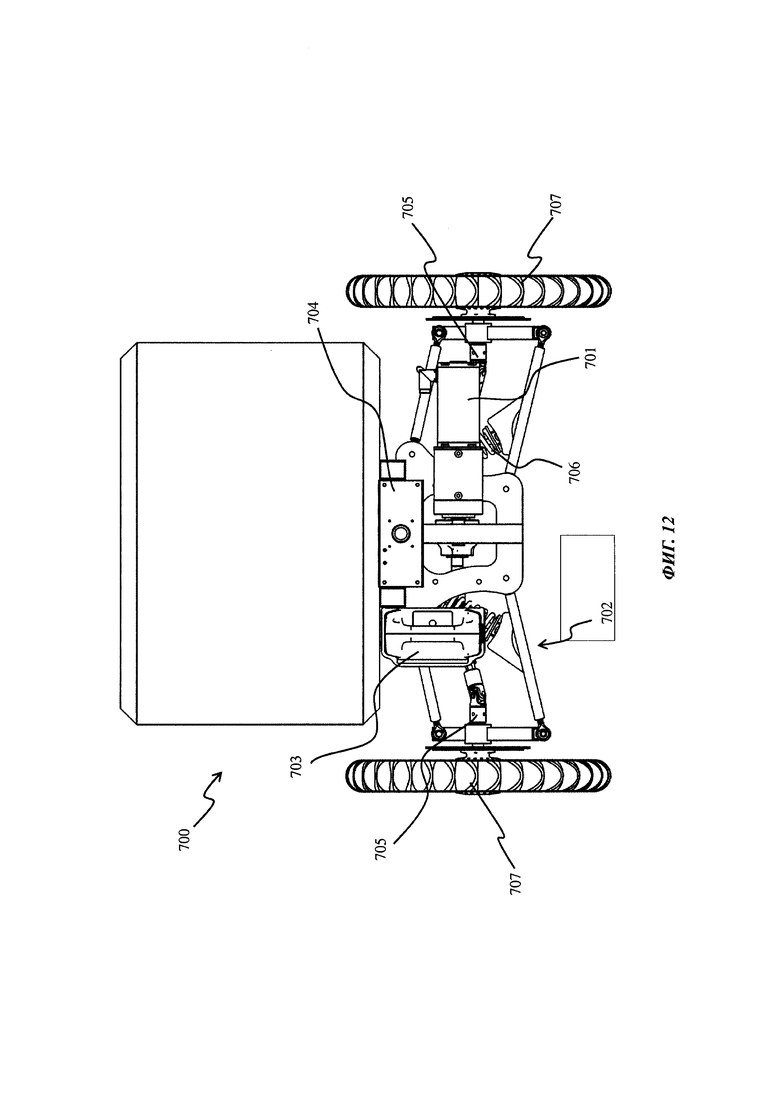
на ФИГ. 12 - второй вариант осуществления прицепа согласно настоящему изобретению.
Ниже идентичные элементы обозначены одними и теми же номерами позиций, если не указано иное.
Осуществление изобретения
На ФИГ. 1 показана схема различных видов торможения. Электрически задействуемое торможение может включать посредством электродвигателя рекуперативное торможение или посредством прямого тормоза плавное прямое торможение. Эти два вида торможения могут также включаться параллельно и дополнять друг друга. В отличие от электрически задействуемого торможения, механически задействуемое торможение использует только прямой тормоз и поэтому инициирует резкое прямое торможение. Соответствующее соединение является чисто механическим (или гидравлическим).
На ФИГ. 2 показан соответствующий настоящему изобретению прицеп 102 с приводом от электродвигателя, соединенный дышлом 108 и соединительным элементом 109 с велосипедом 101. Прицеп 102 содержит два колеса 110, из которых показано только одно. В этом варианте осуществления колеса связаны друг с другом общей осью. Однако, в принципе, колеса могут быть и не связаны друг с другом. Прицеп 102 содержит, далее, электродвигатель 104, расположенный на одном из колес 110. Однако дополнительный электродвигатель может быть предусмотрен и на другом колесе. Электродвигатель может также располагаться на оси. Прицеп 102 приводится от электродвигателя 104, питаемого от аккумулятора 105. Далее, прицеп 102 содержит блок 106 управления, управляющий электродвигателем 104, а также тормозом 107, которым оснащено одно из колес 110. Но могут также управляться и тормоза, предусмотренные на обоих колесах 110 или на колесной оси. Связанный с дышлом 108 сенсорный блок 103 располагается на или в прицепе 102. Сенсорный блок 103 измеряет текущее отклонение расстояния между велосипедом 101 и прицепом 102 в осевом направлении А от заранее заданного нейтрального положения. Обозначение «в осевом направлении» означает: вдоль воображаемой линии, соединяющей велосипед и прицеп. Сенсорный блок 103 выдает соответствующий упомянутому отклонению расстояния электрический сигнал измерения на блок 106 управления. И в зависимости от выданного сенсорным блоком 103 сигнала измерения блок 106 управления может управлять электродвигателем 104 или тормозом 107 и тем самым ускорять или тормозить прицеп относительно велосипеда.
На ФИГ. 3 схематически показан способ согласно настоящему изобретению во взаимосвязи с элементами соответствующего настоящему изобретению прицепа с приводом от электродвигателя. Сенсорный блок 103, 300 может, например, как показано на ФИГ. 2, располагаться на или в прицепе 102. И все дальнейшие показанные элементы предпочтительно располагаются на или в прицепе. Однако блок 106 управления может быть и частью сенсорного блока 103, 300. Блок 106 управления электрически связан соединениями Е с сенсорным блоком 103, 300 и тормозным устройством 107. Блок 106 управления принимает электрические сигналы измерения сенсорного блока 103, 300, обрабатывает их и передает на устройство 120 управления электродвигателем. Прохождение сигнала показано сплошными линиями со стрелками или штриховыми линиями со стрелками. Конечное управление электродвигателем 104 осуществляет устройство 120 управления двигателем. Кроме того, блок 106 управления соединен с регулятором 122 мощности. Через регулятор мощности и устройство управления электродвигателем электроэнергия может подаваться из аккумулятора 105 на электродвигатель 104, тем самым осуществляется привод электродвигателя 104. В принципе, вместо аккумулятора или в дополнение к нему может быть предусмотрен и другой накопитель энергии. Далее, с регулятором 122 мощности соединен регулятор 123 потребления. Через регулятор потребления можно, например, подавать питание на один или несколько сигнальных огней велосипеда. Электрические сигналы измерений сенсорного блока 103, 300 поступают также на тормозное устройство 107. Тормозное устройство 107 может содержать, например, один или несколько расположенных на колесах 110 или на колесной оси тормозов (не показаны). Тормозное устройство 107 электрически связано соединением Е с блоком 106 управления и механически связано соединением М с сенсорным блоком 103, 300. Кроме того, может быть предусмотрен связанный с электродвигателем 104 датчик 124 поворота. Датчик 124 поворота может быть, например, встроен в электродвигатель 124.
Сенсорный блок 103, 300 выполнен с возможностью измерения возникающих отклонений осевого расстояния между велосипедом и прицепом и выдачи электрического сигнала измерения соответствующего отклонения расстояния. Эти отклонения расстояния измеряют в зависимости от некоторого осевого расстояния между прицепом и велосипедом, заранее принятого в качестве расстояния нейтрального положения. При торможении велосипеда расстояние между велосипедом и прицепом уменьшается и возникает отклонение расстояния в осевом направлении. Сенсорный блок 103, 300 генерирует соответствующий этому отклонению расстояния первый электрический сигнал измерения, если расстояние между прицепом и велосипедом уменьшилось относительно нейтрального положения по меньшей мере на некоторое первое значение ухода. Этот первый электрический сигнал измерения посылается в блок 106 управления, который затем через устройство 120 управления электродвигателем эксплуатирует электродвигатель 104 в режиме генератора и осуществляет рекуперативное торможение прицепа. Прохождение сигнала показано штриховыми линиями со стрелками. При этом регенерированная электродвигателем 104 в режиме генератора энергия торможения может через регулятор 122 мощности направляться обратно в аккумулятор 105. Также блок 106 управления в ответ на первый электрический сигнал измерения может через электрическое соединение Е задействовать тормозное устройство 107 и тем самым электрически управлять прямыми тормозами для плавного прямого торможения.
Но если расстояние между велосипедом 101 и прицепом 102 уменьшается относительно нейтрального положения по меньшей мере на некоторое второе значение ухода, причем второе значение ухода больше, чем первое значение ухода, то происходит отклонение механического исполнительного устройства сенсорного блока 103, 300. В результате этого отклонения посылается управляющий сигнал через механическое соединение М на тормозное устройство 107 - и включаются прямые тормоза тормозного устройства 107. В частности, таким образом осуществляется резкое прямое торможение. Но механическое соединение М может быть и гидравлическим, при этом прямое торможение посредством тормозного устройства 107 включают гидравлически. Механическая передача информации показана на ФИГ. 3 штрихпунктирными линиями со стрелками. Кроме того, через тормозное устройство 107 может посылаться сигнал на электродвигатель 104, например, для остановки электродвигателя 104 в случае нарушений в работе блока 106 управления. В дополнение ко второму сигналу измерения, через блок 106 управления и устройство 120 управления электродвигателем на электродвигатель 104 может посылаться первый электрический сигнал измерения, включающий рекуперативное торможение. Таким образом, возможно одновременно осуществлять рекуперативное и прямое торможение.
Если велосипед ускоряется, так что расстояние между прицепом и велосипедом увеличивается относительно нейтрального положения, сенсорный блок 103, 300 генерирует соответствующий второй электрический сигнал измерения. Этот второй электрический сигнал измерения передается на блок 106 управления, который через устройство 120 управления электродвигателем ускоряет электродвигатель 104. Прохождение сигнала показано сплошными линиями со стрелками. Величина генерируемого сенсорным блоком второго электрического сигнала измерения зависит от того, насколько сильно измеряемое расстояние между прицепом и велосипедом отклоняется от нейтрального положения. В ответ на второй электрический сигнал измерения блок 106 управления и устройство 120 управления электродвигателем управляют электродвигателем 104 так, что прицеп 102 ускоряется до тех пор, пока не будет вновь достигнуто расстояние между прицепом и велосипедом, соответствующее нейтральному положению.
В зависимости от определения нейтрального положения, прицеп может эксплуатироваться в режиме следования или в режиме толкания. В режиме следования нейтральное положение, а вместе с ним и расстояние между прицепом и велосипедом, определяется так, что прицеп следует за велосипедом, не создавая ощутимой нагрузки. В режиме толкания нейтральное положение определяется так, что прицеп в нейтральном положении постоянно подталкивает велосипед.
Далее, на ФИГ. 3 показан датчик 121 скорости. Датчик 121 скорости измеряет скорость прицепа и взаимодействует, например, с электродвигателем 104, и/или с колесами 110, и/или с осью 111 прицепа. Измеренную скорость датчик 121 скорости передает на блок 106 управления. В зависимости от скорости, измеренной датчиком 121 скорости, можно включить режим следования и/или режим толкания. К примеру, при высокой скорости, которая может быть развита, в частности, на спуске под гору, можно выключить режим толкания, а при подъеме в гору включить его. Для установления факта движения в гору или под гору может быть альтернативно или дополнительно предусмотрен не показанный датчик уклона.
Датчик 124 поворота может с высокой точностью определять текущее положение электродвигателя 104, улучшая тем самым регулировку согласно настоящему изобретению благодаря более точному контролю электродвигателя 104. В частности, при этом можно лучше контролировать начало движения из состояния покоя. Точное управление электродвигателем 104 имеет большое значение, прежде всего, в раскрытом ниже варианте осуществления сенсорного блока.
ФИГ. 4 отличается от ФИГ. 3 тем, что соответствующий настоящему изобретению прицеп в данном случае эксплуатируют в автономном режиме. Автономный режим может быть включен, например, когда сенсорный блок 103 вместе с дышлом 108 отсоединен от велосипеда. В этом случае человек может толкать прицеп 102 сзади за ухватные поверхности 113. В автономном режиме блок 106 управления не получает сигналов измерения от сенсорного блока 103 или игнорирует сигналы, поступающие от сенсорного блока 103. Вместо них блок 106 управления получает сигналы измерения от датчика 121 скорости и управляет электродвигателем 104 так, чтобы поддерживалась достигнутая ранее скорость прицепа. Это помогает человеку толкать прицеп, особенно на крутых подъемах. Человек может тормозить прицеп ручным тормозом 114 (см. ФИГ. 2). Могут быть предусмотрены дополнительные не показанные датчики, включающие тормоза прицепа, как только человек отходит от прицепа.
На ФИГ. 5 показан разнесенный вид первого варианта осуществления сенсорного блока 103 согласно настоящему изобретению. Сенсорный блок содержит корпус 201 со съемной боковой стенкой 202 и отверстием в корпусе 201 для тяговой штанги 203 для соединения с велосипедом. Показанный сенсорный блок может быть расположен непосредственно на прицепе 102 или на дышле 108. Далее, параллельно тяговой штанге 203 располагается компенсационная штанга 204, усиливающая соединение прицепа с велосипедом в направлении, перпендикулярном осевому. В частности, она может компенсировать силы и моменты, возникающие из-за наклона прицепа вперед в случае, когда центр тяжести прицепа, если смотреть со стороны велосипеда, расположен перед колесами прицепа. Тяговая штанга 203 и компенсационная штанга 204 соединяются с корпусом 201 общим соединительным элементом 205, а также креплениями 206 и 207. Как тяговая штанга 203, так и компенсационная штанга 204 подвижны в осевом направлении вдоль линии соединения прицепа с велосипедом. На расположенном в корпусе 201 конце тяговой штанги 203 имеется головка 208 и спиральная пружина 209, а также упор 210 для одностороннего крепления спиральной пружины 209. Головка 208 имеет удлинитель 230 с шипом, который входит в прорезь 231 сенсорного рычага 213. Сенсорный рычаг 213 и датчик 211 угла поворота являются частью датчика 200 расстояния, соединенного с корпусом 201 монтажной полкой 212. Датчик 211 угла поворота связан с блоком 106 управления прицепа (не показано).
Позицией 214 обозначено исполнительное устройство, которое содержит пусковое коромысло 215, упор 216, возвратную пружину 218, а также демпфирующий блок 220. Соединительный элемент 219 соединяет исполнительное устройство 214 с тормозным устройством 107 прицепа.
Прежде всего, некоторое расстояние между велосипедом 101 и прицепом 102 определяют как нейтральное положение. На ФИГ. 6.1 сенсорный блок показан в нейтральном положении. Далее, если велосипед в процессе эксплуатации ускоряется, то расстояние между велосипедом и прицепом увеличивается, и тяговая штанга 203 вместе с компенсационной штангой 204 выдвигается несколько дальше из корпуса 201. Это движение тяговой штанги 203, позволяет посредством пружины 230 головки 208 поворачивать сенсорный рычаг 213 влево, как показано на ФИГ. 6.2. Таким образом, поступательное движение тяговой штанги 203 преобразуется во вращательное движение сенсорного рычага 213 и, вместе с ним, датчика 211 угла поворота. Датчик 211 угла поворота передает соответствующий отклонению рычага (второй) электрический сигнал измерения на блок 106 управления прицепа. В ответ на этот сигнал измерения блок 106 управления через устройство 120 соответственно управляет электродвигателем 104 для ускорения прицепа. По существу, прицеп ускоряется до тех пор, пока не будет вновь достигнуто нейтральное положение сенсорного рычага.
Если велосипед 101 тормозит, то расстояние между велосипедом 101 и прицепом 102 уменьшается. Тяговая штанга 203 и компенсационная штанга 204 вдвигаются дальше в корпус, и тяговая штанга 203 посредством головки 208 и пружины 230 поворачивает сенсорный рычаг 213 вправо. Это показано на ФИГ. 6.3 и на ФИГ. 7. Датчик 211 угла поворота генерирует соответствующий отклонению рычага (первый) электрический сигнал измерения, передает его на блок 106 управления, и осуществляется рекуперативное торможение электродвигателем 104 прицепа или плавное прямое торможение прицепа тормозным устройством 107. Сенсорный блок может также содержать электрический исполнительный механизм 240, включающий плавное прямое торможение (ФИГ. 7). В ответ на исходящий от датчика 211 угла поворота первый электрический сигнал измерения может срабатывать электрический исполнительный механизм 240, в свою очередь, включающий через механическую буксирную сцепку 241 плавное прямое торможение, в зависимости от отклонения расстояния между тяговой штангой и корпусом. В показанном примере осуществления буксирная сцепка 241 проходит сквозь пусковое коромысло 215.
Если расстояние между велосипедом и прицепом, а значит и между тяговой штангой и корпусом, продолжает уменьшаться, то головка 208 тяговой штанги 203 нажимает на пусковое коромысло 215 механического исполнительного устройства 214, как показано на ФИГ. 6.4. Отклонение пускового коромысла 215 включает прямые тормоза тормозного устройства 107 прицепа с осуществлением резкого прямого торможения.
На ФИГ. 8 показан процесс торможения при использовании сенсорного блока согласно настоящему изобретению. На графике по оси ординат отложена сила торможения, а по оси абсцисс - положение датчика угла поворота. Буквами a-d обозначены различные отклонения датчика угла поворота. Положение а) это нейтральное положение датчика угла поворота. Датчик угла поворота не отклонен, и, соответственно, сила торможения равна нулю. Далее, когда расстояние между велосипедом и прицепом, а значит и между тяговой штангой и корпусом, уменьшается, датчик угла поворота отклоняется вправо, это обозначено буквой b). В пределах этого интервала датчик угла поворота выдает первый электрический сигнал измерения, по которому включается рекуперативное торможение и/или плавное прямое торможение. Чем сильнее уменьшается расстояние между прицепом и велосипедом, тем активнее становится рекуперативное и/или плавное прямое торможение. При дальнейшем уменьшении расстояния между прицепом и велосипедом задействуется, как обозначено буквой с), пусковое коромысло. Срабатывание пускового коромысла и, соответственно, отклонение механического исполнительного устройства приводит к резкому включению прямых тормозов. В показанном примере в этом случае рекуперативное торможение не продолжается. Чем сильнее уменьшается расстояние между прицепом и велосипедом, тем активнее становится резкое прямое торможение.
В результате процесса торможения расстояние между велосипедом и прицепом вновь приближается к нейтральному положению. Соответственно, тяговая штанга и ее головка отходят от пускового коромысла, которое при этом возвращается в свое положение покоя. Однако под влиянием демпфирующего блока исполнительного устройства происходит это сравнительно медленно. Тем самым завершение процесса резкого прямого торможения затягивается, что выражается на графике кривой гистерезиса с медленным спаданием силы торможения по мере уменьшения отклонения датчика (демпфированное прямое торможение). При дальнейшем приближении расстояния между велосипедом и прицепом к нейтральному положению вновь дополнительно включается рекуперативное торможение. Это обозначено буквой d). Когда пусковое коромысло вновь достигает своего положения покоя, блок управления осуществляет исключительно рекуперативное и/или плавное прямое торможение. Процесс торможения заканчивается, когда вновь достигается нейтральное положение.
На ФИГ. 9 показан альтернативный вариант сенсорного блока 300. Этот сенсорный блок 300 содержит переднюю пластину 301, заднюю пластину 302, а также боковые элементы 303, 304. Далее, могут быть предусмотрены не показанные верхняя и нижняя крышки корпуса. В передней пластине 301 имеется отверстие для тяговой штанги 305 для соединения с велосипедом. Тяговая штанга 305 может быть соединена с дышлом 108 или может являться его частью. Сенсорный блок 300 может крепиться непосредственно на прицепе 102 или на дышле 108. Далее, тяговая штанга 305 посредством первого анкерного элемента 306 и второго анкерного элемента 307 жестко соединена с С-образным каркасом 308. С каждой стороны каркаса 308 расположены по три ролика 309, 310. Посредством роликов 309, 310 каркас 308 - и соединенная с ним тяговая штанга 305 - опирается на боковые элементы 303, 304. С помощью нескольких роликов 309, 310 можно скомпенсировать силы и вращающие моменты, возникающие из-за наклона прицепа вперед в случае, когда центр тяжести прицепа, если смотреть со стороны велосипеда, расположен перед колесами прицепа. Боковые элементы 303, 304, в свою очередь, соединены с прицепом.
На боковом элементе 304 расположена сенсорная полоса 311 линейного потенциометра, напротив которой располагается соединенный с каркасом 308 сенсорный элемент 312. Разумеется, сенсорная полоса 311 может располагаться и на боковом элементе 303. Сенсорная полоса может быть связана и с каркасом, а сенсорный элемент может располагаться на одном из боковых элементов. На тяговую штангу 305 надеты пружины 313, 314 и закреплены посредством креплений на передней пластине 301 и на задней пластине 302. Пружина 314 оснащена к тому же пружинным демпфером 321. Кроме того, для механического тормоза предусмотрено механическое исполнительное устройство 330, содержащее по меньшей мере тяговые тросы 315, демпфирующий блок 318 и захват 319. Тяговые тросы 315 одним концом крепятся через тросовые втулки 316 на передней пластине 301, а другим концом через соединительный элемент 317 соединяются с демпферной штангой 320 демпфирующего блока 318. Демпфирующий блок 318 закреплен на задней пластине 302, а захват - на каркасе 308.
Тяговая штанга 305 подвижна в осевом направлении А вдоль линии, соединяющей велосипед и прицеп. При относительном перемещении велосипеда и прицепа тяговая штанга 305 перемещается вдоль своей продольной оси в направлении V или W таким образом, что она вместе с каркасом 308 посредством роликов 309, 310 скользит вдоль боковых элементов 303, 304. Таким образом, относительное перемещение велосипеда и прицепа соответствует относительному перемещению тяговой штанги 305 и сенсорного корпуса, в частности, боковых элементов 303, 304. При торможении расстояние между велосипедом и прицепом уменьшается, что ведет к вдвиганию тяговой штанги 305 в корпус в направлении, обозначенном V. При ускорении расстояние между велосипедом и прицепом увеличивается, вследствие чего тяговая штанга 305 выдвигается из корпуса в направлении, обозначенном W. При таких перемещениях тяговой штанги 305 связанный с каркасом 308 сенсорный элемент 312 также перемещается вдоль сенсорной полосы 311. В зависимости от взаиморасположения сенсорной полосы 311 и сенсорного элемента 312 (а тем самым, от расстояния между велосипедом и прицепом) генерируется соответствующий электрический сигнал измерения. Этот сигнал передается на блок 106 управления, который раскрытым выше способом осуществляет регулировку.
В нормальном рабочем диапазоне, т.е. при умеренных ускорениях и торможениях, тяговая штанга 305 перемещается вдоль своей продольной оси без существенного механического демпфирования. При этом выражение «без демпфирования» означает, что не предусмотрено никаких дополнительных демпфирующих механизмов, которые в отсутствие механической возвращающей силы могли бы удерживать с возможностью смещения тяговую штангу 305 в нормальном диапазоне. Тяговая штанга свободно скользит посредством каркаса внутри корпуса. Регулировка движения тяговой штанги 305 или принимающего тяговую штангу 305 корпуса производится только по электрическим сигналам измерения путем относительного перемещения корпуса и тяговой штанги. Пружины 313, 314 служат только амортизации движения тяговой штанги 305 при особенно больших отклонениях. В нормальном рабочем диапазоне тяговая штанга 305 не контактирует с пружинами 313, 314. Подобное, чисто электронное, регулирование очень точно. В частности, отсутствуют такие возмущения сцепки, как вибрации, поскольку тяговая штанга совершенно свободно расположена в корпусе через подвижный каркас. Для того чтобы обеспечить такое точное регулирование, важно точно знать положение двигателя. Для этого служит упомянутый датчик 124 поворота. Этот датчик может прецизионно определять текущее положение электродвигателя 104 и таким образом, благодаря прецизионному контролю электродвигателя 104, улучшает регулировку согласно настоящему изобретению.
На ФИГ. 10 показаны различные положения сенсорного блока с ФИГ. 9. Сначала некоторое расстояние между велосипедом 101 и прицепом 102 определяют как нейтральное положение. На ФИГ. 10.1 сенсорный блок показан в нейтральном положении.
Процесс ускорения можно видеть на ФИГ. 10.2. Если велосипед ускоряется, увеличивается расстояние между велосипедом и прицепом, и тяговая штанга 305 выдвигается из корпуса в направлении W. При этом расстояние между прицепом и велосипедом увеличивается по меньшей мере на третье заранее заданное значение ухода. Вместе с тяговой штангой 305 движется каркас 308, так что ролики 309, 310 катятся вдоль боковых элементов 303, 304. На ФИГ. 10 ролики 309, 310 находятся в боковых элементах 303, 304 и поэтому не видны. Вместе с каркасом 308 сенсорный элемент 312 линейного потенциометра смещается вдоль сенсорной полосы 311. На ФИГ. 10 сенсорная полоса 311 располагается на боковом элементе 304 и поэтому не видна. Линейный потенциометр передает соответствующий отклонению электрический сигнал измерения на блок 106 управления прицепа 102. В ответ на этот сигнал измерения блок 106 управления через устройство 120 управления двигателем соответственно управляет электродвигателем 104 для ускорения прицепа 102. Прицеп ускоряют, по существу, до тех пор, пока линейный потенциометр не покажет вновь достижение нейтрального положения. На ФИГ. 10.2 прицеп ускорялся так сильно, что первый анкерный элемент 306 вошел в контакт с пружиной 313. Пружина 313, как и пружина 314, располагается вне нормального диапазона и обеспечивает дополнительную механическую амортизацию для ослабления ударов при резких ускорениях/торможениях.
Если велосипед 101 тормозят, расстояние между велосипедом 101 и прицепом 102 уменьшается. Тяговая штанга 305 вдвигается дальше в корпус, сдвигая каркас 308 и, вместе с ним, сенсорный элемент 311 в направлении V. Это показано на ФИГ. 10.3. При этом расстояние между велосипедом и прицепом в какой-то момент уменьшается на первое заранее заданное значение ухода. Линейный потенциометр генерирует соответствующий отклонению от нейтрального положения электрический сигнал измерения, который передается на блок 106 управления. Это вызывает рекуперативное торможение электродвигателем 104 прицепа 102 или прямое плавное торможение прицепа 102 тормозным устройством 107.
Если расстояние между велосипедом и прицепом, а значит и между корпусом и тяговой штангой 305, продолжает уменьшаться, анкерный элемент 307 входит в контакт с пружиной 314 и, таким образом, механически демпфируется. При резком торможении тяговая штанга 305 преодолевает сопротивление пружины 314. При этом связанный с каркасом 308 захват 319 входит в контакт с соединительным элементом 317 и вдвигает демпферную штангу 320 в демпфирующий блок 318. Это показано на ФИГ. 10.4. В результате включается механическое торможение, т.е. прямые тормоза тормозного устройства 107 прицепа включаются с резким прямым торможением.
На ФИГ. 11 процесс торможения с применением сенсорного блока с ФИГ. 9 показан в виде кривой гистерезиса. На графике по оси ординат отложена сила торможения, а по оси абсцисс - положение линейного потенциометра. Буквами a-d обозначены различные позиции линейного потенциометра. Позиция а) это нейтральное положение линейного потенциометра. Соответственно, сила торможения равна нулю. Далее, когда расстояние между велосипедом и прицепом, а значит и между тяговой штангой и корпусом, уменьшается, сенсорный элемент 312 смещается вдоль сенсорной полосы 311. Таким образом, линейный потенциометр измеряет отклонение расстояния, в результате чего создается возрастающая сила торможения; что обозначено буквой b). В пределах этого интервала линейный потенциометр выдает первый электрический сигнал измерения, по которому включается рекуперативное торможение и/или плавное прямое торможение. Чем сильнее уменьшается расстояние между прицепом и велосипедом, тем активнее становится рекуперативное и/или плавное прямое торможение. При дальнейшем уменьшении расстояния между прицепом и велосипедом задействуется, как обозначено буквой с), механический тормоз. В этом случае, как упоминалось выше, захват 319 вдвигает демпферную штангу 320 в демпфирующий блок 318, что приводит к резкому включению прямых тормозов. В показанном примере рекуперативное торможение далее не продолжается. Чем сильнее уменьшается расстояние между прицепом и велосипедом, тем активнее становится резкое прямое торможение.
В результате процесса торможения расстояние между велосипедом и прицепом вновь приближается к нейтральному положению. Тяговая штанга снова выдвигается из корпуса. При этом захват 319 отделяется от соединительного элемента 317, поскольку демпферная штанга 320 теперь медленно выдвигается из демпфирующего блока 318. Благодаря демпфирующему блоку 318 механическое торможение ослабевает лишь постепенно, т.е. завершение процесса резкого прямого торможения происходит демпфированно, что выражается на графике кривой гистерезиса с медленным спаданием силы торможения по мере уменьшения отклонения позиции датчика. При дальнейшем приближении расстояния между велосипедом и прицепом к нейтральному положению, снова дополнительно осуществляется рекуперативное торможение. Это обозначено буквой d). Когда демпфирующий блок 318 вновь достигает своего положения покоя, блок управления осуществляет исключительно рекуперативное и/или плавное прямое торможение. Процесс торможения заканчивается, когда вновь достигается нейтральное положение.
На ФИГ. 12 показан прицеп 700 согласно дальнейшему варианту осуществления. Прицеп содержит поперечно-двухрычажную подвеску 702 в качестве двойной демпфированной ходовой части. Сенсорный блок 704 согласно настоящему изобретению расположен в передней части прицепа 700. Электродвигатель 701 привода прицепа 700 питается от аккумулятора 703. Электродвигатель 701, как и аккумулятор 703, расположен над осью шарнира 705. У каждого колеса - своя независимая пружина 706. Такой прицеп позволяет улучшить сцепление шин с дорогой и снизить воздействие возмущений, негативно влияющих на работу сенсорного блока 704. Кроме того, такой прицеп пригоден для реализации способа согласно настоящему изобретению.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОРМОЗ ПРИЦЕПА | 2019 |
|
RU2729334C1 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОЙ РЕГУЛИРОВКИ ПРОСВЕТА МЕЖДУ АВТОМОБИЛЕМ-ТЯГАЧОМ И ПРИСОЕДИНЕННЫМ К НЕМУ ПРИЦЕПОМ | 2012 |
|
RU2556826C2 |
| СПОСОБ УПРАВЛЕНИЯ n-ОСНЫМ ПРИЦЕПОМ ТЯГАЧА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2609643C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ ИСПЫТАНИЯ ТОРМОЖЕНИЯ НА АВТОМОБИЛЯХ С ПРИЦЕПОМ И/ИЛИ ПОЛУПРИЦЕПОМ | 2011 |
|
RU2487807C2 |
| ПРИЦЕП ДЛЯ АВТОПОЕЗДА | 2001 |
|
RU2282551C2 |
| Гидровакуумный привод тормозов прицепа | 1989 |
|
SU1794719A1 |
| Прицеп | 1979 |
|
SU844454A2 |
| Способ испытаний колесных транспортных средств и динамометрический прицеп для его осуществления | 1987 |
|
SU1504539A1 |
| ЭЛЕКТРООБОРУДОВАНИЕ АВТОМОБИЛЯ ИЛИ АВТОПОЕЗДА ИЗ ТЯГАЧА И, ПО МЕНЬШЕЙ МЕРЕ, ОДНОГО ПРИЦЕПА | 2018 |
|
RU2727630C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ СЦЕПНОЕ УСТРОЙСТВО ПРИЦЕПА | 2015 |
|
RU2613140C2 |
Группа изобретений относится к прицепу с приводом от электродвигателя. Прицеп с приводом от электродвигателя содержит колесо, электродвигатель, накопитель энергии, дышло, сенсорный блок, блок управления и механическое исполнительное устройство. Сенсорный блок выполнен с возможностью измерения возникающих отклонений расстояния между тягачом и прицепом от нейтрального положения и генерирования электрического сигнала измерения, соответствующего отклонению расстояния. Блок управления выполнен с возможностью торможения прицепа в ответ на электрический сигнал измерения сенсорного блока и с возможностью управления электродвигателем в ответ на электрический сигнал измерения сенсорного блока для ускорения прицепа. Механическое исполнительное устройство выполнено с возможностью независимого от блока управления торможения прицепа в ответ на отклонение расстояния. Достигается возможность буксировки прицепа тягачом с низким уровнем энергопотребления и с повышением удобства езды. 2 н. и 13 з.п. ф-лы, 12 ил. 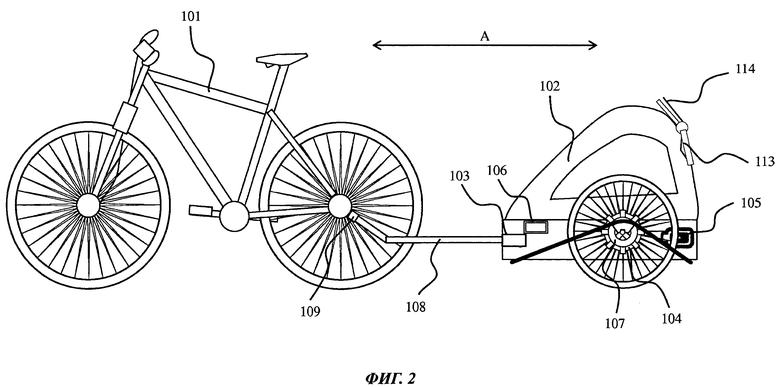
1. Способ управления прицепом с приводом от электродвигателя, включающий в себя следующие шаги:
некоторое расстояние между прицепом (102, 700) и тягачом (101) определяют в качестве нейтрального положения,
измеряют отклонение расстояния между прицепом (102, 700) и тягачом (101) от нейтрального положения и выдают это отклонение в качестве значения ухода,
электрически задействуют торможение прицепа (102, 700), если расстояние между прицепом (102, 700) и тягачом (101) уменьшено относительно нейтрального положения по меньшей мере на некоторое первое значение ухода,
механически задействуют торможение прицепа (102, 700), независимо от электрически задействованного торможения, если расстояние между прицепом (102, 700) и тягачом (101) уменьшено относительно нейтрального положения по меньшей мере на некоторое второе значение ухода, причем второе значение ухода больше, чем первое значение ухода,
ускоряют прицеп (102, 700) с помощью электродвигателя (104, 701), если расстояние между прицепом (102, 700) и тягачом (101) увеличено относительно нейтрального положения на некоторое третье значение ухода.
2. Способ по п. 1, отличающийся тем, что электрически задействуемое торможение прицепа (102, 700) инициирует рекуперативное торможение и/или плавное прямое торможение, а механически задействуемое торможение прицепа (102, 700) инициирует резкое прямое торможение, причем резкое прямое торможение имеет более крутое нарастание тормозящей силы в зависимости от отклонения расстояния между прицепом (102, 700) и тягачом (101), чем плавное прямое торможение.
3. Способ по п. 2, отличающийся тем, что рекуперативное торможение осуществляют с помощью электродвигателя (104, 701) и/или плавное либо резкое прямое торможение осуществляют с помощью прямого тормоза (107).
4. Способ по одному из предшествующих пунктов, отличающийся тем, что электрически задействуемое торможение заканчивают, если расстояние между прицепом (102, 700) и тягачом (101) уменьшено относительно нейтрального положения на некоторое четвертое значение ухода, которое меньше, чем первое значение ухода.
5. Способ по одному из предшествующих пунктов, отличающийся тем, что механически задействуемое торможение заканчивают и электрически задействуемое торможение начинают или продолжают, если расстояние между прицепом (102, 700) и тягачом (101) уменьшено относительно нейтрального положения на некоторое пятое значение ухода, которое меньше, чем второе значение ухода, но больше, чем четвертое значение ухода.
6. Способ по одному из предшествующих пунктов, отличающийся тем, что ускорение заканчивают, если расстояние между прицепом (102, 700) и тягачом (101) увеличено относительно нейтрального положения на некоторое шестое значение ухода, которое меньше, чем третье значение ухода.
7. Способ по одному из предшествующих пунктов, отличающийся тем, что нейтральное положение определяют таким образом, что при нем прицеп (102, 700) следует за тягачом (101), не создавая нагрузки, или таким образом, что при нем прицеп (102, 700) толкает тягач (101).
8. Прицеп с приводом от электродвигателя, содержащий
по меньшей мере одно колесо (110, 707),
электродвигатель (104, 701) для привода по меньшей мере одного колеса (110, 707),
по меньшей мере один накопитель энергии (105, 705) для снабжения энергией электродвигателя (104, 701),
дышло (108) для соединения прицепа (102, 700) с тягачом (101),
сенсорный блок (103, 300) на дышле (108), выполненный с возможностью измерения возникающих отклонений расстояния между тягачом (101) и прицепом (102, 700) от нейтрального положения и генерирования электрического сигнала измерения, соответствующего отклонению расстояния,
реагирующий на электрический сигнал измерения блок (106) управления, выполненный с возможностью торможения прицепа (102, 700) в ответ на электрический сигнал измерения сенсорного блока (103, 300), если расстояние между прицепом (102, 700) и тягачом (101) уменьшено относительно нейтрального положения по меньшей мере на некоторое первое значение ухода, и с возможностью управления электродвигателем (104, 701) в ответ на электрический сигнал измерения сенсорного блока (103, 300) для ускорения прицепа (102, 700), если расстояние между прицепом (102, 700) и тягачом (101) увеличено относительно нейтрального положения на некоторое третье значение ухода,
механическое исполнительное устройство (214, 330), выполненное с возможностью независимого от блока (106) управления торможения прицепа (102, 700) в ответ на отклонение расстояния, если расстояние между прицепом (102, 700) и тягачом (101) уменьшено относительно нейтрального положения по меньшей мере на некоторое второе значение ухода, причем второе значение ухода больше, чем первое значение ухода.
9. Прицеп по п. 8, отличающийся тем, что реагирующий на электрический сигнал измерения блок (106) управления выполнен с возможностью рекуперативного торможения прицепа (102, 700) в ответ на электрический сигнал измерения и/или с возможностью плавного прямого торможения прицепа (102, 700), причем механическое исполнительное устройство (214, 330) выполнено с возможностью резкого торможения прицепа (102) в ответ на отклонение расстояния, при этом резкое торможение имеет более крутое нарастание тормозящей силы в зависимости от отклонения расстояния между прицепом (102, 700) и тягачом (101), чем плавное торможение.
10. Прицеп по п. 9, отличающийся тем, что осуществление рекуперативного торможения предусмотрено с помощью электродвигателя (104, 701) и/или осуществление плавного и резкого прямого торможения предусмотрено с помощью тормозного устройства (107) с прямым тормозом.
11. Прицеп по одному из пп. 8-10, отличающийся тем, что в качестве накопителя энергии для снабжения энергией электродвигателя (104, 701) предусмотрен электрический аккумулятор (105, 703).
12. Прицеп по одному из пп. 8-11, отличающийся тем, что предусмотрен датчик (121) скорости, соединенный по меньшей мере с электродвигателем (105, 701) и блоком (106) управления.
13. Прицеп по одному из пп. 8-12, отличающийся тем, что сенсорный блок (300) содержит: корпус, выходящую из корпуса тяговую штангу (305) для соединения с дышлом (305), причем тяговая штанга (305) закреплена с возможностью смещения относительно корпуса, и датчик (311, 312) расстояния, выполненный с возможностью определения относительного расположения корпуса и тяговой штанги (305), при этом тяговая штанга (305) удерживается с возможностью смещения в некотором нормальном диапазоне без механической возвращающей силы, причем указанный нормальный диапазон выходит за пределы первого и третьего значений ухода.
14. Прицеп по п. 13, отличающийся тем, что сенсорный блок (300) также содержит несколько связанных с тяговой штангой (305) роликов (309, 310), а также образующие часть корпуса и вмещающие указанные ролики направляющие элементы (303, 304), причем тяговая штанга (305) опирается на ролики (309, 310) с возможностью смещения относительно направляющих элементов (303, 304).
15. Прицеп по п. 13 или 14, отличающийся тем, что механическое исполнительное устройство содержит демпфирующий блок (318) с демпферной штангой (320) и захватом (319), соединенным с тяговой штангой (305), причем механическое исполнительное устройство выполнено с возможностью торможения прицепа (102) таким образом, что захват (319), вследствие перемещения тяговой штанги (305), толкает демпферную штангу (320) в демпфирующий блок (318).
| US 2013311058 A1, 21.11.2013 | |||
| DE 102010042907 A1, 26.04.2012 | |||
| US 2005151420 A1, 14.07.2005 | |||
| US 2011042154 A1, 24.02.2011. |

