Изобретение относится к трансмиссиям или к выключаемым муфтам.
Изобретение может быть использовано в машиностроении при конструировании оборудования, содержащего муфты или трансмиссии.
Известен способ реализации сцепления, заключающийся в затормаживании тормозной шестерни в системе взаимосвязи двух валов. При торможении тормозной шестерни внешней тормозной муфтой или тормозной колодкой происходит передача вращающего момента между входным и выходным валами (DE 102014003957 A1, 2015.09.17).
Недостатком этого изобретения является наличие фрикционных поверхностей, вращающихся друг относительно друга.
Известна планетарная коробка передач с внутренним расположением тормозной муфты.
Планетарная коробка передач с внутренним расположением тормозной муфты содержит одинаковое количество тормозных и планетарных шестерней, причем планетарные шестерни закреплены на валу, имеющем возможность поворота относительно двух параллельных осей, а тормозные шестерни имеют возможность вращения относительно собственной оси и возможность торможения с помощью тормозной муфты, солнечная шестерня закреплена на входном вале, а выходной вал соединен с водилом, тормозные шестерни выполнены кольцевыми с зубьями на внутренней поверхности и опираются с помощью подшипников на корпус коробки передач, а тормозная муфта взаимодействует с внутренней поверхностью цилиндрических частей тормозных шестерней (RU 2014130927 A).
Недостатком такой планетарной передачи является дискретность переключения передач.
Известна универсальная самоцентрирующаяся система, у которой используются только статические свойства. Универсальная самоцентрирующаяся система известна из изобретений: RU 2014106630 A, RU 2014106628 A, RU 2014106627 A, RU 2014106146 A, RU 2013157051 A, RU 2013154311 A, RU 2013153163 A, RU 2013152649 A, RU 2013148896 A, RU 2013145988 A, RU 2013145987 A, RU 2013145253 A, RU 2013144445 A, RU 2013144444 A, RU 2013142690 A, RU 2013142204 A, RU 2013142203 A, DE 102013019629 A1, DE 102013019628 A1, DE 102013019627 A1, DE 102013019593 A1, DE 102013019592 A1, DE 102013019404 A1, DE 102013019402 A1, DE 102012018132 A1, DE 102012018131 A1, DE 102012017180 A1, DE 102012016380 A1, DE 102012016314 A1, DE 102012013308 A1, DE 102012012586 A1, DE 102012002076 A1, DE 102012001232 A1, DE 102012000316 A1.
Универсальная самоцентрирующаяся система имеет внешнее и внутреннее основания, расположенные в одной плоскости. Внешнее основание охватывает внутреннее основание. На каждом основании закреплены три или более роликов, звездочек или шестерней вращения. Число роликов на каждом основании одинаково. Каждый ролик может быть заменен на два ролика замены для того, чтобы использовать участок троса, ремня или цепи между роликами для натяжения. Воздействие силы натяжения на участок троса, цепи или ремня между роликами замены не влияет на свойства универсальной самоцентрирующейся системы. Способ натяжения ремня, троса или цепи известен из изобретения: RU 2013147711 A. В приведенных изобретениях использовались статические свойства универсальной самоцентрирующейся системы. Заявляемое изобретение предназначено для возможности использования одного из динамических свойств универсальной самоцентрирующейся системы: совместное вращение внутреннего и внешнего оснований возможно даже при несовпадении осей вращения оснований. Это означает, что внутреннее и внешнее основания могут вращаться каждое относительно своих несовпадающих осей вращения при воздействии вращающего момента на одно из оснований.
Целью изобретения является создание передачи с плавно изменяющимся передаточным отношением и без переключающихся и трущихся частей и возможности использования динамических свойств универсальной самоцентрирующейся системы.
Поставленная цель достигается использованием универсальной самоцентрирующейся системы и ее динамических свойств. Для использования динамических свойств универсальной самоцентрирующейся системы необходимо смещать друг относительно друга оси внутреннего и внешнего оснований. Способ смещения осей оснований универсальной самоцентрирующейся системы с угловым смещением оснований заключается в смещении одного или нескольких подвижных роликов, шестерней или звездочек оснований с помощью пружины и возвращении их в исходное состояние при нагрузке на выходной вал, при этом компенсацию длины цепи, ремня или троса осуществляют угловым сдвигом внутреннего основания относительно внешнего основания. Способ позволяет реализовывать, например, передачи с плавно изменяющимся передаточным отношением с начальной угловой скоростью выходного вала ноль. Такие передачи не содержат трущихся вращающихся и переключающихся частей. Способ позволяет обходиться без дополнительных шестерней, роликов, звездочек натяжения.
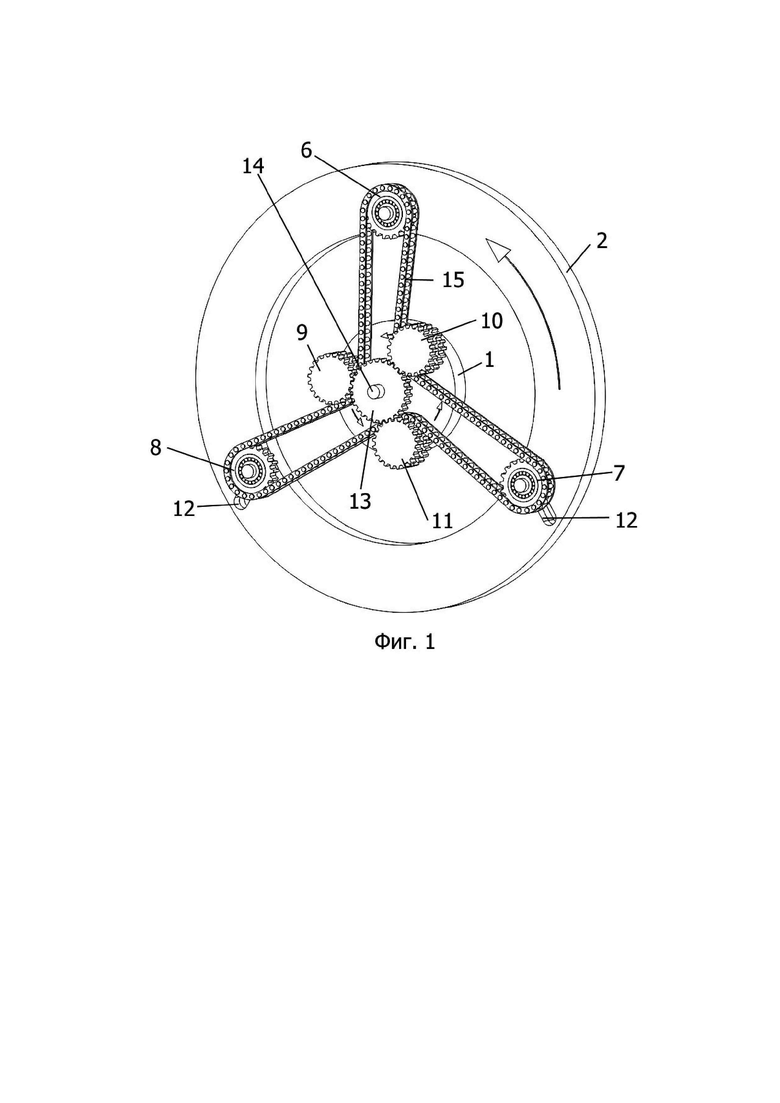
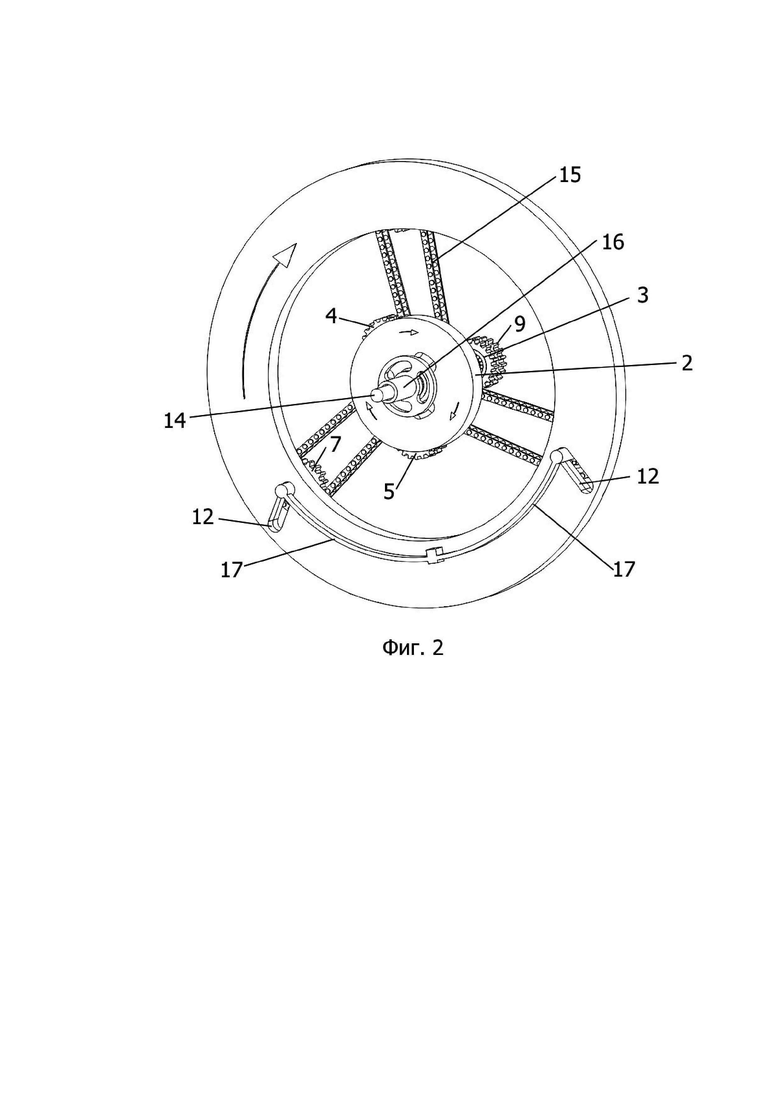
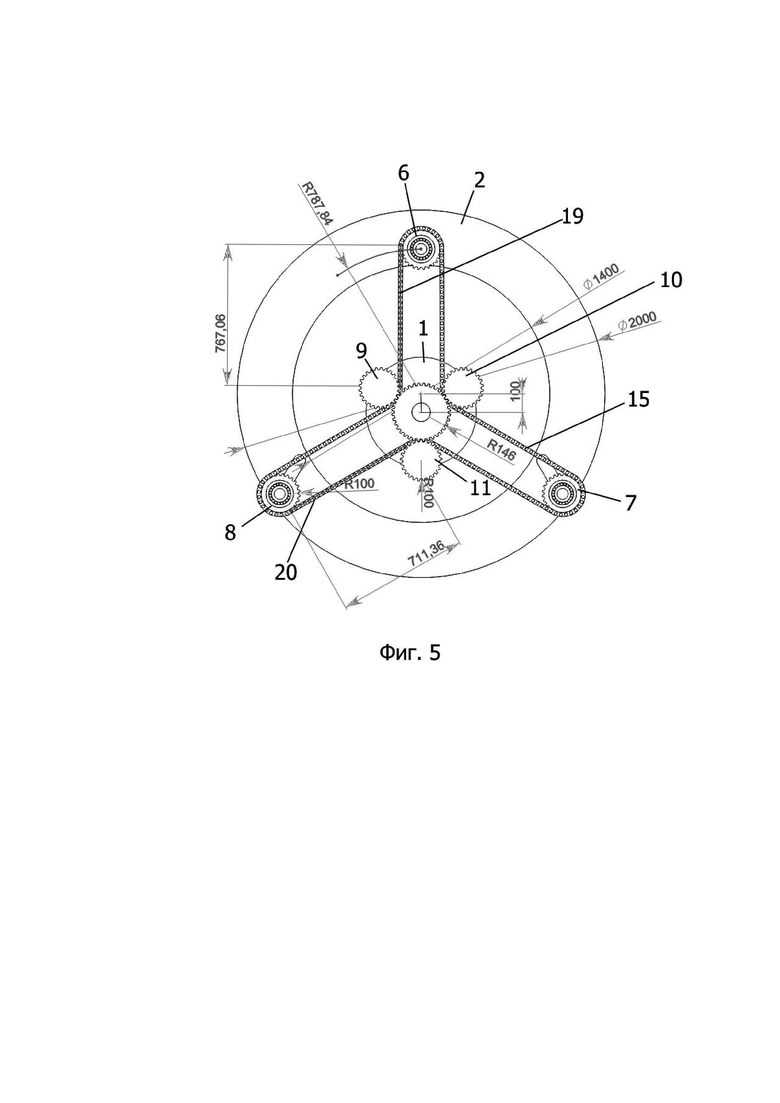
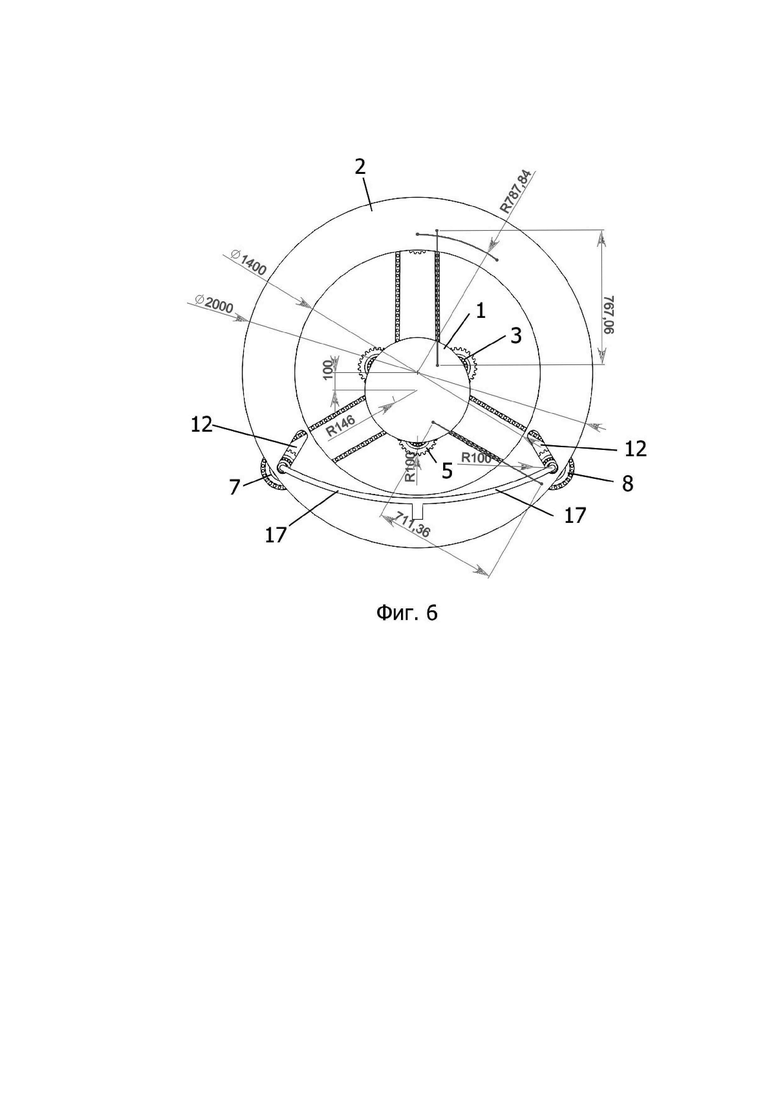
В примере конкретного исполнения универсальная самоцентрирующаяся система имеет внутреннее основание 1 и внешнее основание 2. На внутреннем основании 1 закреплены шестерни 3, 4, 5 с возможностью вращения вокруг своих осей. На внешнем основании 2 закреплены шестерни 6, 7, 8 с возможностью вращения относительно своих осей. На одной оси с шестернями 6, 7, 8 закреплены шестерни 9, 10, 11, передающие вращающий момент шестерне 13 и связанному с ней выходному валу 14. Подшипник 18 разделяет выходной вал 14 и внутреннее основание 1 с закрепленным на нем входным валом 16. Пружина 17 смещает шестерни 7 и 8 от центра основания 2. Оси этих шестерней перемещаются в пазах 12. При этом ось основания 1 будет смещена относительно оси внешнего основания 2. При воздействии вращающего момента на входной вал 16 все шестерни оснований вращаются и вращающий момент передается от шестерней 9, 10, 11 на шестерню 13 и выходной вал 14. Увеличение нагрузки на выходном валу приводит к увеличению силы натяжения цепи 15. Это натяжение воздействует на шестерни 8, 7 и пружину 17 и сдвигает оси этих шестерней в сторону центра внешнего основания 2. На фигуре 1, 2 и 4 показано положение шестерней 7 и 8, когда оси оснований совпадают и скорость выходного вала 14 равна нулю. На фигурах 5 и 6 показано положение шестерней 7 и 8, когда оси оснований смещены и скорость выходного вала 14 достигает максимального значения. Компенсация изменения длины цепи 15 происходит за счет поворота внутреннего основания 1 относительно внешнего основания 2 на угол 21, как показано на фигуре 4. При этом скорость выходного вала 16 уменьшается. При дальнейшем увеличении нагрузки на входной вал скорость выходного вала может достигнуть нулевого значения.
На фигуре 5 представлены данные для ориентировочного подсчета угловой скорости выходного вала относительно угловой скорости входного вала. Шестерня 6 и 9 через 120 градусов займут положение шестерней 8 и 11. При этом участок 19 цепи 15, равный 767,06, уменьшится до значения участка цепи 20, равного 711,36. За полный оборот основания 2 цепь 15 переместится на величину (767,06-711,36)⋅3=167,01. При радиусе шестерней 3-8, равном 100, они повернутся на 167,01/3,14⋅200=0,26 оборота. Соотношение между шестернями 13 и 11 равно 100/146=0,68. Выходной вал 14 повернется на 0,26⋅0,68⋅360=64 градуса, если входной вал повернется на 360 градусов. При этом смещение осей оснований равно значению 100 при радиусе внешнего основания, равном 787,84, что составляет 12,7 процента.
Скорость вращения выходного вала будет пропорциональна величине смещения осей оснований. Способ смещения осей универсальной самоцентрирующейся системы обеспечивает плавное изменение скорости выходного вала начиная с нулевого значения, а следовательно, и плавное изменение передаточного отношения. Изменяя соотношение диаметров шестерней устройства, можно изменять диапазон изменения передаточного отношения. Устройство, реализующее способ, не содержит трущихся вращающихся друг относительно друга деталей. В способе используется динамические свойства универсальной самоцентрирующейся системы, так как оба основания вращаются и изменяется скорость вращения выходного вала при изменении относительного смещения осей оснований.
На фигуре 1 представлен вид универсальной самоцентрирующейся системы.
На фигуре 2 представлен вид универсальной самоцентрирующейся системы, вид сзади.
На фигуре 3 представлен разрез универсальной самоцентрирующейся системы, вид спереди.
На фигуре 4 показан угловой сдвиг оснований при совпадении их осей.
На фигуре 5 представлены сведения для подсчета передаточного отношения.
На фигуре 6 представлено положение перемещаемых шестерней при смещении осей оснований.


Изобретение относится к трансмиссиям или к выключаемым муфтам. Способ смещения осей оснований универсальной самоцентрирующейся системы с угловым смещением оснований заключается в смещении одного или нескольких подвижных роликов, шестерней или звездочек основания с помощью пружины и возвращении в исходное состояние при нагрузке на выходной вал, при этом компенсацию длины цепи, ремня или троса осуществляют угловым сдвигом внутреннего основания относительно внешнего основания. Способ позволяет реализовывать, например, передачи с плавно изменяющимся передаточным отношением с начальной угловой скоростью выходного вала ноль. Такие передачи не содержат трущихся вращающихся и переключающихся частей. Способ позволяет обходиться без дополнительных шестерней, роликов, звездочек натяжения. В способе использована универсальная самоцентрирующаяся система и ее динамические свойства. Для использования динамических свойств универсальной самоцентрирующейся системы необходимо смещать друг относительно друга оси внутреннего и внешнего оснований. В результате создана передача с плавно изменяющимся передаточным отношением и без переключающихся и трущихся частей. 6 ил.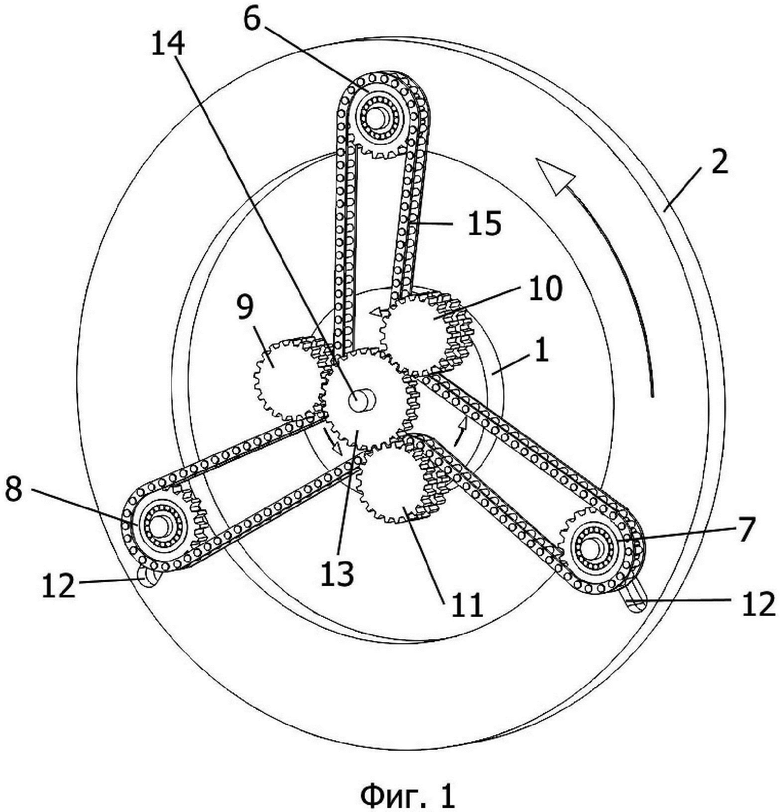
Способ смещения осей оснований универсальной самоцентрирующейся системы с угловым смещением оснований, включающий использование универсальной самоцентрирующейся системы, отличающийся тем, что смещают один или нескольких подвижных роликов, шестерней или звездочек основания с помощью пружины и возвращают их в исходное состояние при нагрузке на выходной вал, при этом компенсацию длины цепи, ремня или троса осуществляют угловым сдвигом внутреннего основания относительно внешнего основания.
| DE 202014003363 U1, 18.06.2014 | |||
| Составное зубчатое колесо | 1987 |
|
SU1566123A1 |
| US 6122985 A, 26.09.2000 | |||
| US 6123640 A, 26.09.2000. | |||

