Область техники, к которой относится изобретение
[001] Настоящее изобретение относится к технической области инженерных механизмов, и в частности, относится к устройству, препятствующему скольжению опорной лапы, и самоходной машине, обеспеченной подобным устройством.
Уровень техники изобретения
[002] Многие самоходные машины, такие как автомобили технической помощи, в настоящее время оснащаются передними и задними устройствами опорной ноги, и передние и задние устройства опорной ноги способны обеспечить устойчивую опору во время работы самоходных машин, а также предотвратить опрокидывание из-за высокой рабочей нагрузки.
[003] Принимая автомобиль технической помощи в качестве примера, автомобиль технической помощи является специальным аварийным транспортным средством с двойными функциями, поддерживающе-перетаскивающей и подъемной, и опорная нога используется в качестве основного его компонента и имеет большое значение во время процесса работы. С одной стороны, эффективность опорной ноги непосредственно влияет на операцию подъема подъемной стрелы и опорную работу опорного рычага; с другой стороны, опорная нога является защитным барьером для обеспечения устойчивости и безопасности во время аварийно-спасательной работы.
[004] В настоящее время передняя опорная нога большинства сверхмощных автомобилей технической помощи на родине и за рубежом имеет А-образную форму или Н-образную форму, при этом:
опорная нога А-образной формы является большей по размаху, компактной по конструкции и небольшой по занимаемой площади; а опорная нога Н-образной формы является простой по конструкции, малой по размаху и неприменима для сверхмощных автомобилей технической помощи;
во время работы автомобиля технической помощи, в частности, во время бокового дистанционного подъема и медленного движения подъемной стрелы, генерируется большой опрокидывающий крутящий момент, обусловленный высокой массой приводного механизма и тяжелым предметом, а также длинным силовым рычагом, и в частности, во время медленного движения возникает высокое инерциальное столкновение, таким образом, транспортное средство имеет риск опрокидывания. Для того чтобы улучшить безопасность во время работы, автомобиль технической помощи в настоящее время обычно использует опорную ногу A-образной формы, с тем, чтобы увеличить размах и, таким образом, улучшить устойчивость всего транспортного средства.
[005] По меньшей мере, существуют следующие технические проблемы в предшествующем уровне техники:
1) существующая опорная нога A-образной формы может вызывать явление бокового скольжения во время рабочего процесса, имеет большую динамическую нагрузку на все транспортное средство, непосредственно влияет на устойчивость всего транспортного средства и даже может быть причиной несчастных случаев в тяжелых ситуациях, таким образом, безопасность вызывает беспокойство;
2) во время работы опорной ноги, опорная нога имеет высокую деформацию и недостаточную нагрузку;
3) в процессе бокового скольжения опорной ноги, опорная подлапка в нижней части опорной ноги наносит серьезный ущерб поверхности земли;
4) для того, чтобы уменьшить явление серьезного повреждения поверхности земли, обусловленное боковым скольжением, деревянные подкладки должны перевозиться с транспортным средством и укладываться на землю, тем самым увеличивая трудоемкость операторов и приводя к низкой эффективности аварийно-спасательных работ.
Сущность изобретения
[006] Настоящее изобретение направлено на обеспечение устройства, препятствующего скольжению опорной лапы, и самоходной машины, снабженной им, которое решает техническую проблему, которой подвержена опорная нога с боковым скольжением по предшествующему уровню техники. Кроме того, предпочтительные технические решения по настоящему изобретению дополнительно решают технические проблемы высокой деформации и недостаточной нагрузки опорной лапы и имеют преимущества низкой возможности повреждения поверхности земли и низкой трудоемкости операторов.
[007] Для того чтобы реализовать вышеприведенную цель, настоящее изобретение обеспечивает следующие технические решения:
[008] Устройство, препятствующее скольжению опорной лапы, предусмотренное вариантами осуществления настоящего изобретения, содержит основание, опорную лапу, фиксатор и скользящую направляющую структуру, при этом: скользящая направляющая структура расположена между опорной лапой и основанием, и опорная лапа допускает скольжение по основанию вдоль заданного направления посредством скользящей направляющей структуры; а фиксатор расположен на основании и опорной лапе, и когда опорная лапа скользит в заданное положение фиксации по основанию вдоль заданного направления посредством скользящей направляющей структуры, фиксатор способен фиксировать опорную лапу на основании.
[009] В предпочтительном или возможном варианте осуществления опорная лапа имеет опорную подлапку с плитообразной нижней частью, скользящая направляющая структура содержит две направляющие планки, неподвижно расположенные на основании и противоположные по расположению, две направляющие канавки, противоположные по расположению, образованы между двумя направляющими планками и основанием, два выступа, противоположные по расположению на нижней части опорной подлапки, зацеплены в две направляющие канавки, соответственно, а направление длины двух направляющих канавок является таким же, как заданное направление.
[010] В предпочтительном или возможном варианте осуществления, скользящая направляющая структура содержит направляющую канавку, расположенную в основании, и направляющий элемент, неподвижно расположенный в нижней части опорной подлапки, при этом направляющий элемент зацеплен в направляющую канавку и способен скользить вдоль направления длины направляющей канавки, а направление длины направляющей канавки является таким же, как заданное направление.
[011] В предпочтительном или возможном варианте осуществления, фиксатор содержит ограничительный столбик, упругую конструкцию и ограничительное отверстие, расположенное в основании, при этом: осевое направление ограничительного столбика является перпендикулярным по отношению к направлению скольжения опорной лапы; упругая структура расположена между опорной лапой и ограничительным столбиком; и когда опорная лапа скользит к заданному фиксированному положению по основанию вдоль заданного направления посредством скользящей направляющей структуры, ограничительный столбик зацепляется в ограничительное отверстие посредством упругого действия упругой структуры.
[012] В предпочтительном или возможном варианте осуществления упругая структура содержит втулку, упругий элемент и захватный компонент, при этом один конец втулки жестко соединен с опорной лапой, а препятствующий выпадению конец полностью соединен с втулкой и имеет внутренним диаметр, который меньше, чем внутренний диаметр втулки, расположенный на другом конце втулки; ограничительный столбик содержит концевую рабочую часть и зацепляющую часть, при этом внешний диаметр концевой рабочей части больше зацепляющей части, причем зацепляющая часть зацеплена во втулке, а захватный компонент, используемый для захвата рукой пользователя, расположен на участке зацепляющей части, продолжающемся за втулку и препятствующий выпадению конец; а упругий элемент расположен во втулке и упирается против препятствующего выпадению конца в концевую рабочую часть, соответственно.
[013] В предпочтительном или возможном варианте осуществления, упругий элемент представляет собой пружину, вставленную в зацепляющую часть ограничительного столбика, а захватный компонент представляет собой вытяжное кольцо или ручку, соединенную с участком зацепляющей части, продолжающимся за втулку и препятствующий выпадению конец.
[014] В предпочтительном или возможном варианте осуществления, устройство, препятствующее скольжению опорной лапы, дополнительно содержит по меньшей мере одну препятствующую выпадению пластину, блоки износостойких подушек и ограничительный элемент, при этом препятствующая выпадению пластина жестко соединена с краем основания, и направление длины препятствующей выпадению пластины является перпендикулярным к направлению скольжения опорной лапы; при этом, когда опорная лапа скользит к заданному положению фиксации по основанию вдоль заданного направления посредством скользящей направляющей структуры, опорная лапа упирается против препятствующей выпадению пластины; по меньшей мере два износостойких амортизирующих блока равномерно распределены по нижней поверхности основания и жестко соединены с нижней поверхностью основания; а ограничительный элемент жестко соединен с основанием, и когда опорная лапа скользит к заданному втянутому положению по основанию вдоль заданного направления посредством скользящей направляющей структуры, опорная лапа упирается в ограничительный элемент.
[015] В предпочтительном или возможном варианте осуществления, ручка дополнительно соединена с препятствующей выпадению пластиной.
[016] Самоходная машина, предусмотренная вариантами осуществления настоящего изобретения, содержит неподвижную раму, опорную ногу А-образной формы, телескопические силовые механизмы и устройство, препятствующее скольжению опорной лапы, предусмотренное любым техническим решением вариантов осуществления настоящего изобретения, при этом: опорная нога А-образной формы содержит левую телескопическую опорную ногу и правую телескопическую опорную ногу, а левая телескопическая опорная нога и правая телескопическая опорная нога содержат основную ногу, шарнирно соединенную с неподвижной рамой, и подвижную ногу, с возможностью скольжения соединенную с основной ногой, соответственно; телескопические силовые механизмы расположены между соответствующими подвижными ногами левой телескопической опорной ноги и правой телескопической опорной ноги и неподвижной рамой, и телескопические силовые механизмы способны приводить в действие подвижные ноги для вращения относительно неподвижной рамы и осуществлять вытягивающее или втягивающее движение относительно основных ног, которые с возможностью скольжения связаны с подвижными ногами; а опорная лапа устройства, препятствующего скольжению опорной лапы, шарнирно соединена с нижней частью подвижной ноги.
[017] В предпочтительном или возможном варианте осуществления, левая телескопическая опорная нога и правая телескопическая опорная нога дополнительно содержат по меньшей мере один многозвенный механизм, ограничительный экран и ползун, соответственно, при этом: многозвенный механизм содержит первое звено и второе звено; телескопические силовые механизмы расположены между левой и правой телескопическими опорными ногами и неподвижной рамой, соответственно, и каждый из телескопических силовых механизмов содержит телескопический масляный цилиндр и масляный цилиндр переменной амплитуды; одна из гильз цилиндра и поршневой шток телескопического масляного цилиндра соединен с неподвижной рамой, а другая одна из гильз цилиндра и поршневой шток телескопического масляного цилиндра соединен с подвижной ногой; один конец каждого из первого звена и второго звена шарнирно соединен с одной из гильз цилиндра и поршневым штоком масляного цилиндра переменной амплитуды; другой конец первого звена шарнирно соединен с основной ногой; другая одна из гильз цилиндра и поршневой шток масляного цилиндра переменной амплитуды и другой конец второго звена шарнирно соединены в различных местах неподвижной рамы, а масляный цилиндр переменной амплитуды установлен между первым звеном и вторым звеном; ограничительные экраны неподвижно расположены на соответствующих основных ногах левой телескопической опорной ноги и правой телескопической опорной ноги, а углубленные участки расположены в нижних частях ограничительных экранов, выпуклые участки неподвижно расположены в верхней части опорной лапы, и телескопические силовые механизмы способны приводить в действие подвижные ноги и опорные лапы для перемещения к положению, где выпуклые участки зацепляются в углубленные участки; а ползуны располагаются между соответствующими основными ногами и подвижными ногами левой телескопической опорной ноги и правой телескопической опорной ноги, и основные ноги являются скользяще соединенными с подвижными ногами посредством ползунов.
[018] На основании любого из вышеприведенных технических решений, варианты осуществления настоящего изобретения по меньшей мере могут обеспечивать следующие технические эффекты:
согласно устройству, препятствующему скольжению опорной лапы, предусмотренному вариантами осуществления настоящего изобретения, опорная лапа способна скользить по основанию вдоль заданного направления посредством скользящей направляющей структуры, и когда опорная лапа скользит к заданному положению фиксации по основанию вдоль заданного направления посредством скользящей направляющей структуры, фиксатор способен фиксировать опорную лапу на основании, по этой причине, когда устройство, препятствующее скольжению опорной лапы, применяется к опорной ноге А-образной формы самоходной машины, опорная лапа способна автоматически регулировать размах опорной ноги в процессе скольжения по основанию, процесс изменения положения опорной лапы является стабильно проходящим без толчков, а тем временем, фиксатор способен хорошо осуществлять размещение опорной лапы и опорной ноги, соединенной с ней, таким образом, избегая возникновения явления бокового скольжения и, таким образом, решая техническую проблему, в соответствии с которой опорная нога была подвержена боковому скольжению согласно предшествующему уровню техники. Поскольку проблема бокового скольжения решена, и опорная лапа стабильно перемещается без толчков, не причиняется повреждение земле, деформация опорной ноги является низкой, нагрузка является равномерной, а конструкционная надежность лучше, и обеспечивается устойчивость и безопасность всей самоходной машины (например, автомобиля технической помощи), тем временем пользователю нет необходимости переносить и устанавливать подкладные бревна, поэтому трудоемкость пользователя является низкой.
[019] По сравнению с предшествующим уровнем техники предпочтительное техническое решение по настоящему изобретению по меньшей мере имеет следующие преимущества:
1. Потенциальные угрозы безопасности, возникающие при боковом скольжении опорной ноги А-образной формы согласно предшествующему уровню техники решены, появление несчастных случаев исключается, а устойчивость всего транспортного средства улучшается, таким образом, условия нагрузки на опорную ногу А-образной формы значительно улучшаются.
2. Опорная нога А-образной формы, предусмотренная настоящим изобретением, является способной реализовать автоматическую регулировку своего размаха и устойчивое перемещение без толчков и удовлетворять потребностям различных условий эксплуатации, таким образом, достигая более высокой приспосабливаемости.
3. Во время поддержки существующей опорной ноги А-образной формы, для того чтобы уменьшить повреждение земли, подкладные бревна должны перевозиться с транспортным средством и укладываться, что приводит к трудоемкой операции, высокой интенсивности труда и низкой эффективности аварийно-спасательных работ, однако устройство, препятствующее скольжению опорной ноги, предусмотренное настоящим изобретением, не требует подкладных бревен и компактно по структуре, простое и удобное в эксплуатации, и более гуманно, таким образом, эффективность работы самоходной машины (например, автомобиля технической помощи), предусмотренной настоящим изобретением, значительно возрастает.
Краткое описание чертежей
[020] Прилагаемые чертежи, изображенные в данном документе, используются для обеспечения дальнейшего понимания настоящего изобретения и составляют часть настоящей заявки, а схематичные варианты осуществления настоящего изобретения и его иллюстрации используются для объяснения настоящего изобретения и не создают необоснованного ограничения настоящего изобретения. На прилагаемых чертежах:
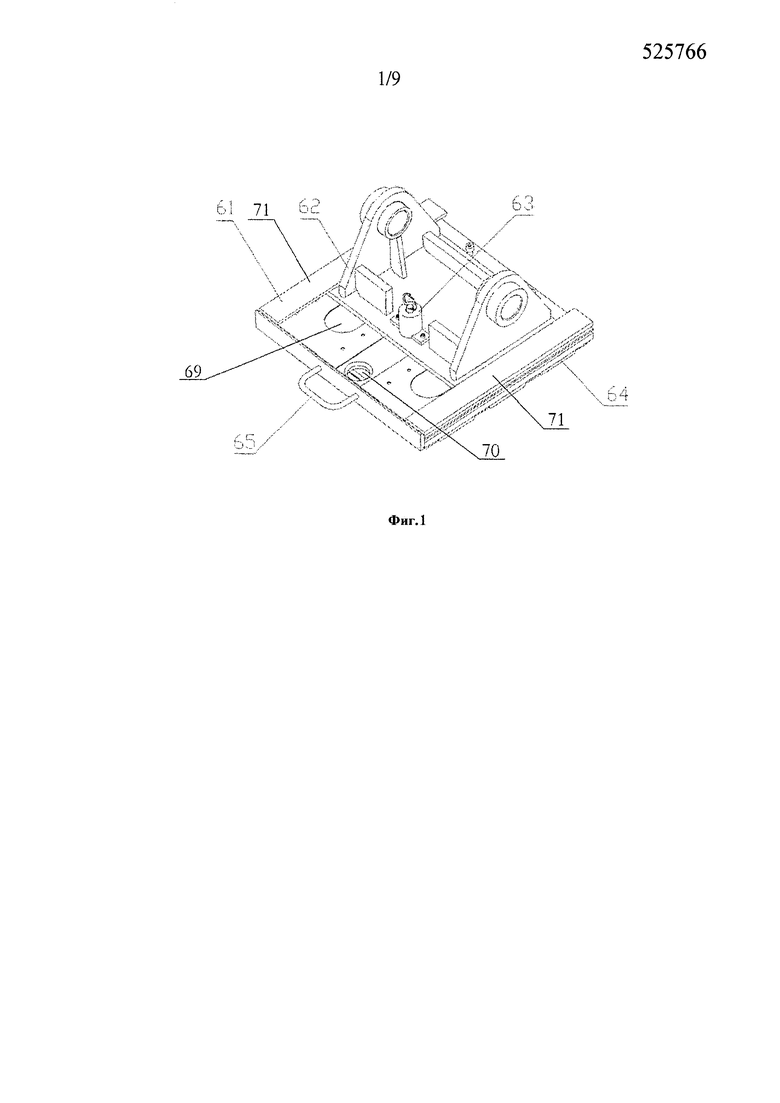
[021] Фиг. 1 представляет собой схематический чертеж трехмерной конструкции устройства, препятствующего скольжению опорной лапы, предусмотренного вариантами осуществления настоящего изобретения;
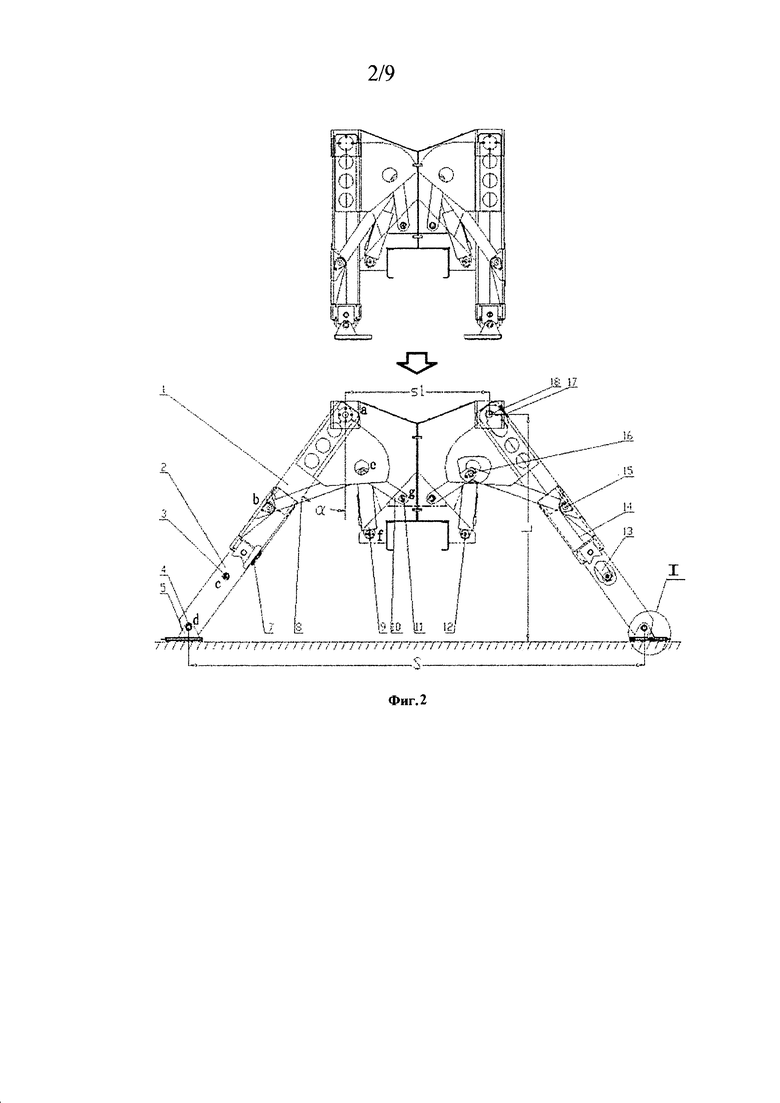
[022] Фиг. 2 представляет собой схематический чертеж процесса перемещения опорной ноги А-образной формы самоходной машины, снабженной устройством, препятствующим скольжению опорной лапы, предусмотренным вариантами осуществления настоящего изобретения, в вытянутое состояние из втянутого состояния;
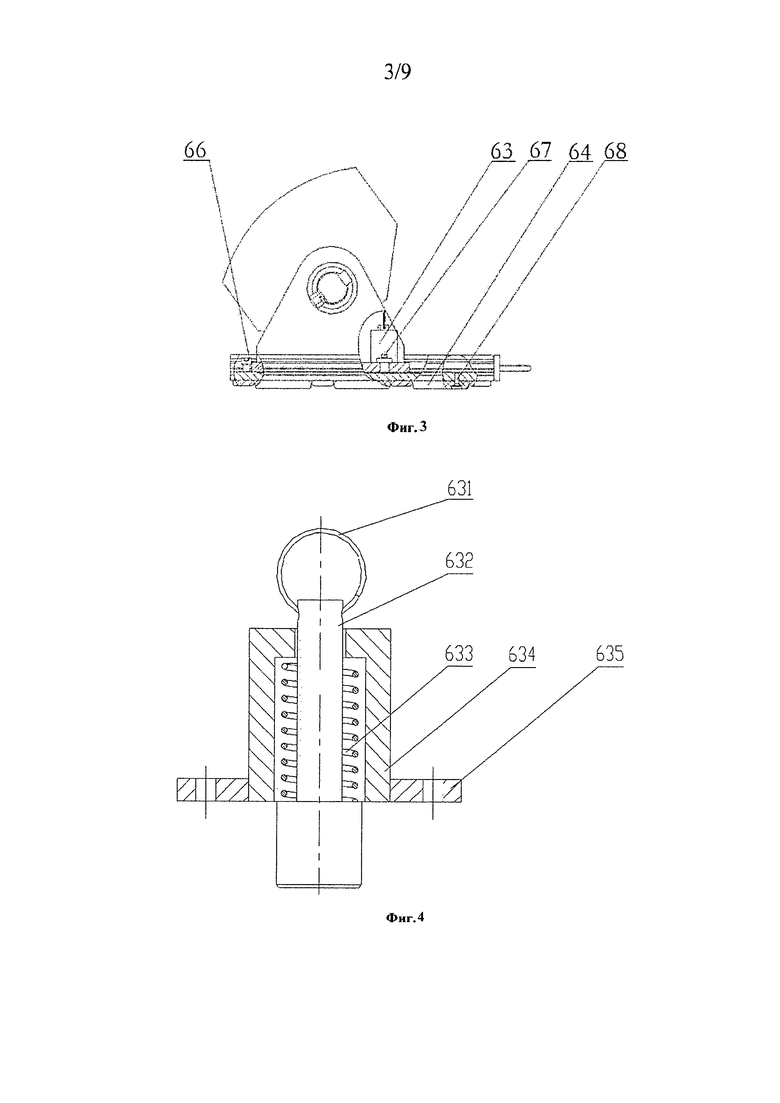
[023] Фиг. 3 представляет собой частичный, данный в разрезе увеличенный схематический чертеж конструкции опорной ноги, представленной на фиг. 2, и устройства, препятствующего скольжению опорной лапы, расположенного в участке I;
[024] Фиг. 4 представляет собой частичный, данный в разрезе схематичный чертеж фиксатора устройства, препятствующего скольжению опорной лапы, предусмотренного вариантами осуществления настоящего изобретения;
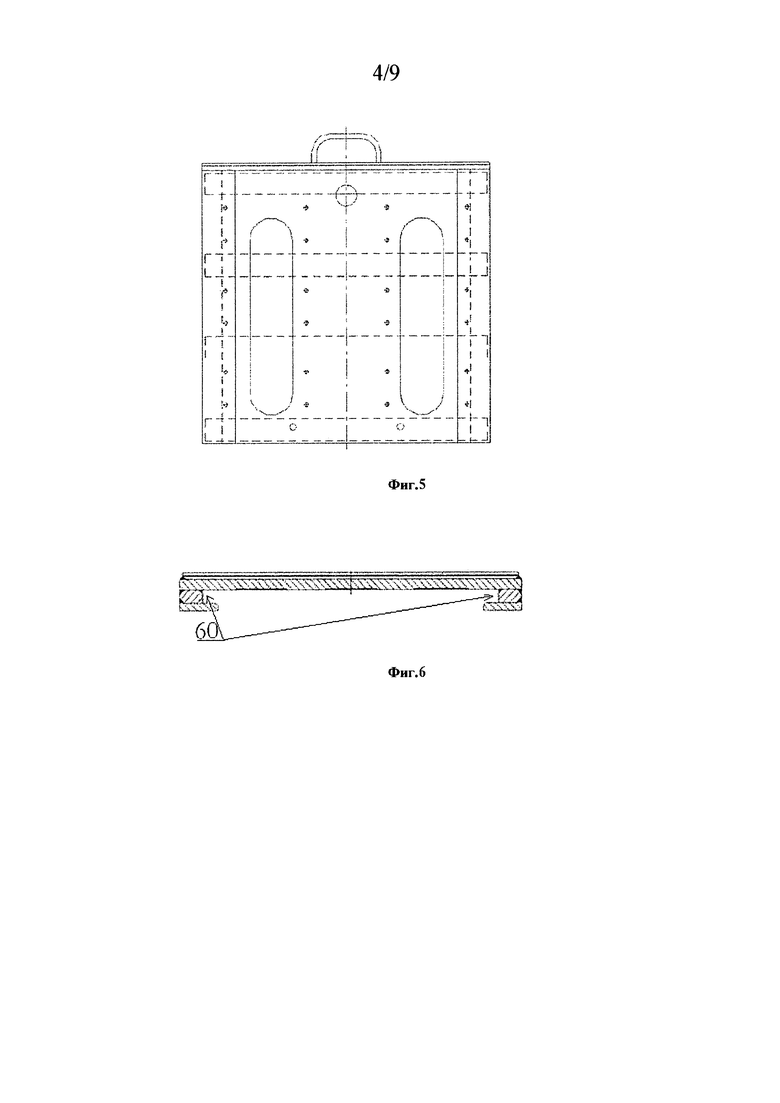
[025] Фиг. 5 представляет собой схематичный вид в перспективе основания устройства, препятствующего скольжению опорной лапы, предусмотренного вариантами осуществления настоящего изобретения;
[026] Фиг. 6 представляет собой схематичный чертеж сечения основания устройства, препятствующего скольжению опорной лапы, предусмотренного вариантами осуществления настоящего изобретения;
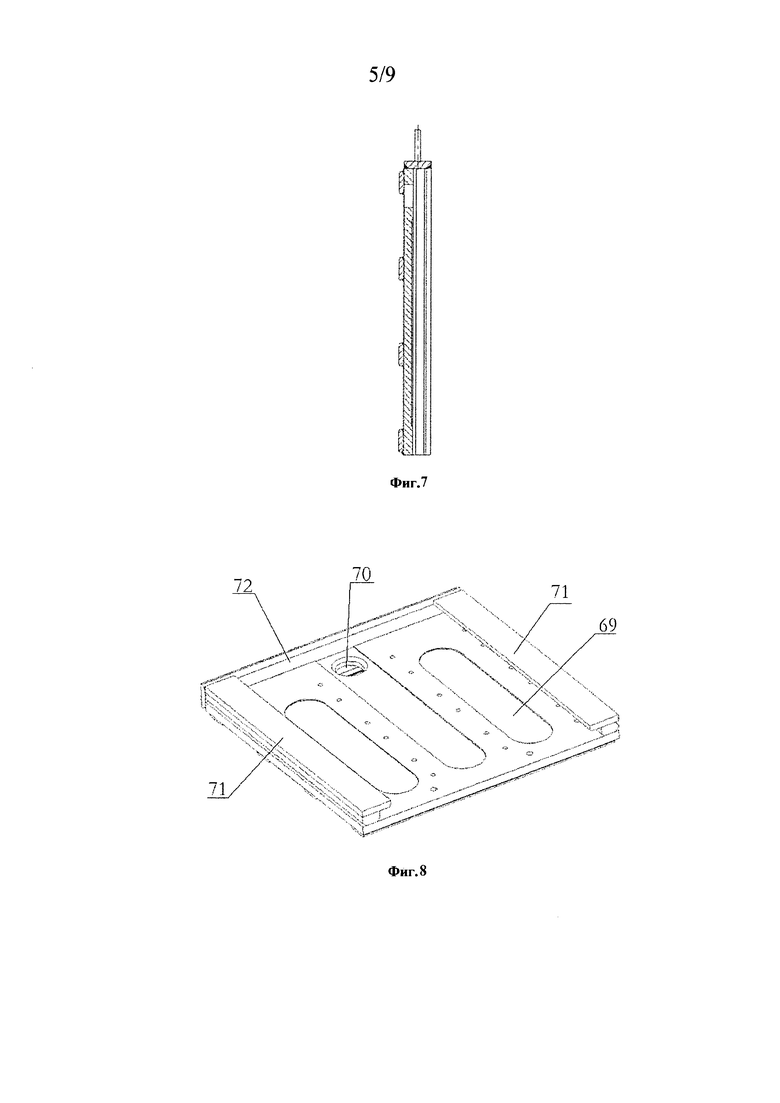
[027] Фиг. 7 представляет собой схематичный чертеж продольного сечения основания устройства, препятствующего скольжению опорной лапы, предусмотренного вариантами осуществления настоящего изобретения;
[028] Фиг. 8 представляет собой схематичный чертеж трехмерной структуры основания устройства, препятствующего скольжению опорной лапы, предусмотренного вариантами осуществления настоящего изобретения;
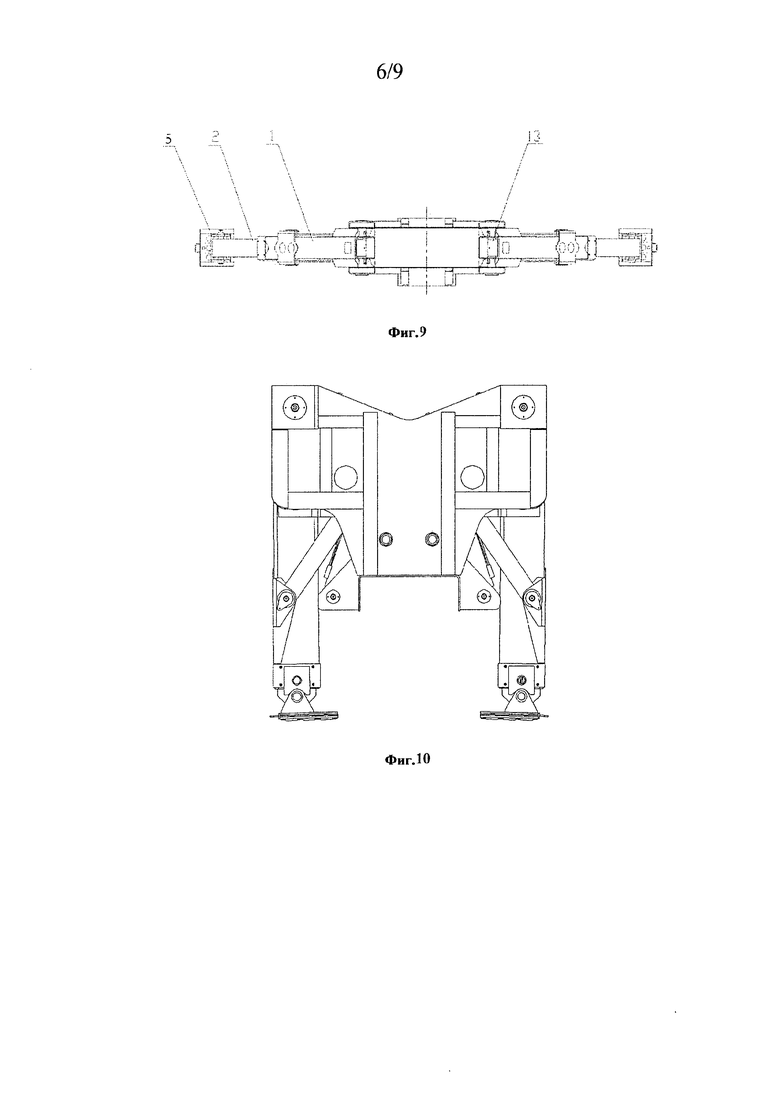
[029] Фиг. 9 представляет собой схематичный вид сверху, когда опорная нога А-образной формы самоходной машины снабжена устройством, препятствующим скольжению опорной лапы, предусмотренным вариантами осуществления настоящего изобретения, находится в вытянутом положении;
[030] Фиг. 10 представляет собой схематичный вид спереди, когда опорная нога А-образной формы самоходной машины снабжена устройством, препятствующим скольжению опорной лапы, предусмотренным вариантами осуществления настоящего изобретения, находится во втянутом положении;
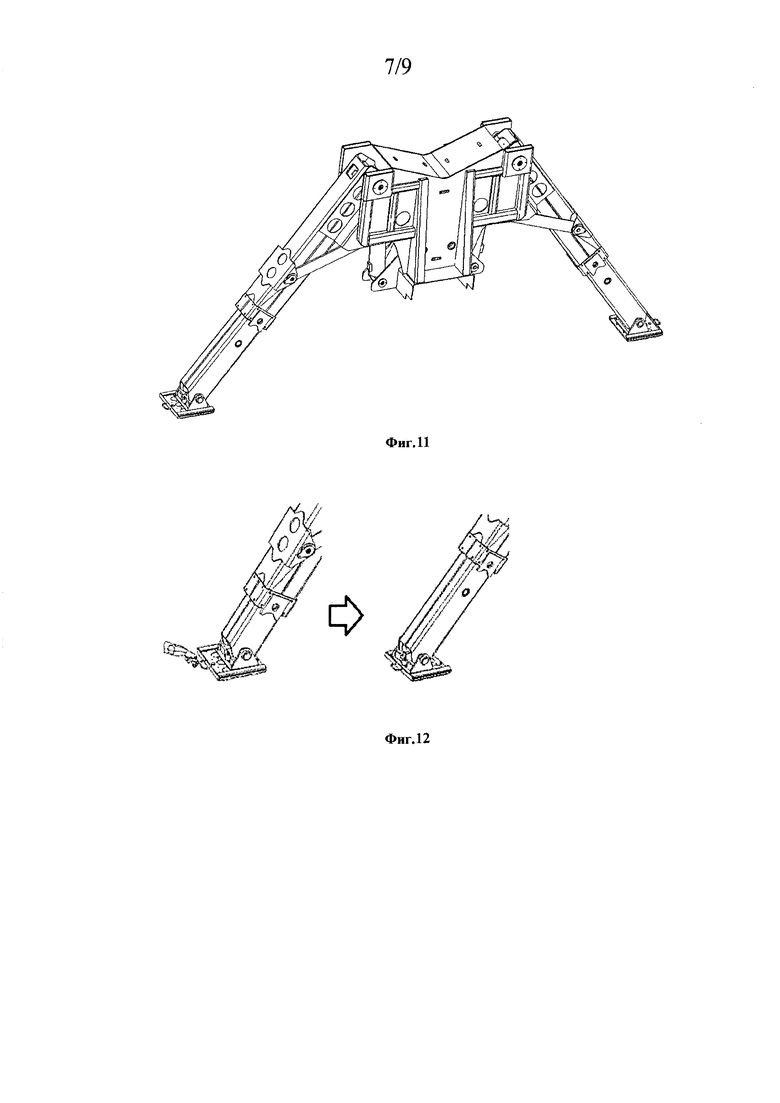
[031] Фиг. 11 представляет собой схематичный чертеж трехмерной структуры, когда опорная нога А-образной формы самоходной машины снабжена устройством, препятствующим скольжению опорной лапы, предусмотренным вариантами осуществления настоящего изобретения, находится в вытянутом положении;
[032] Фиг. 12 представляет собой схематичный чертеж процесса автоматической регулировки размаха на устройстве, препятствующем скольжению опорной лапы, на левой телескопической опорной ноге A-образной опорной ноги самоходной машины, снабженной устройством, препятствующим скольжению опорной лапы, предусмотренным вариантами осуществления настоящего изобретения;
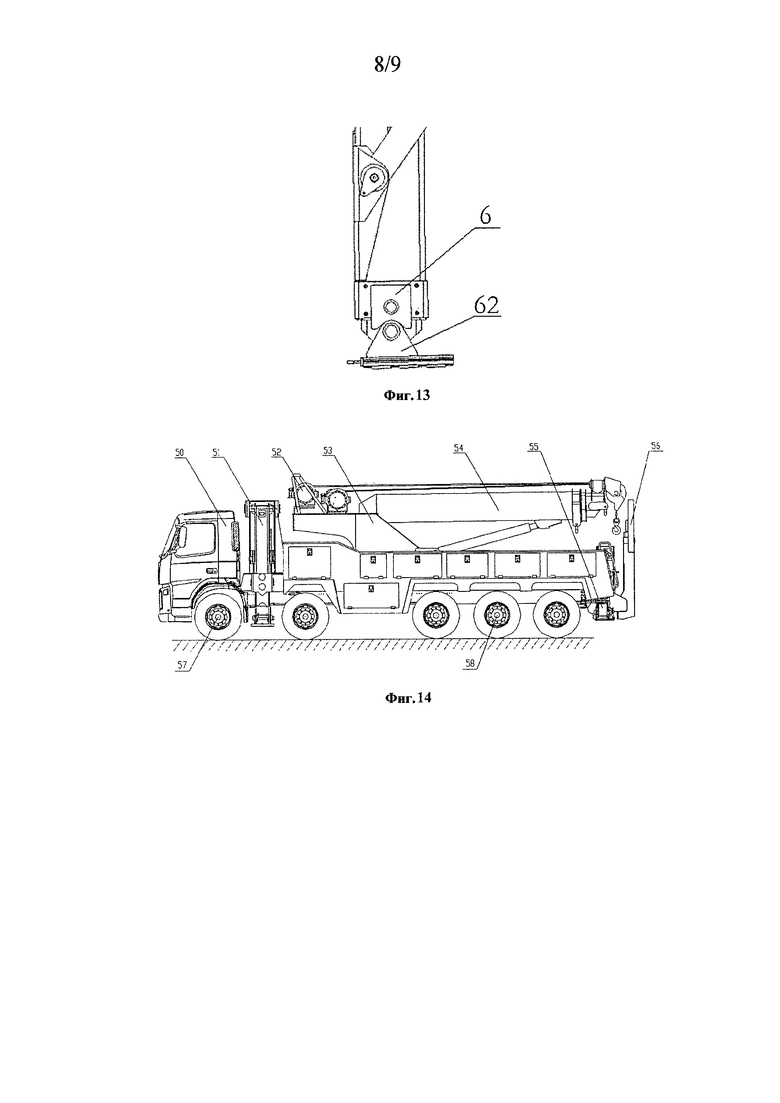
[033] Фиг. 13 представляет собой схематичный чертеж структуры устройства, препятствующего скольжению опорной лапы, когда левая телескопическая опорная нога A-образной опорной ноги самоходной машины, снабженная устройством, препятствующим скольжению опорной лапы, предусмотренным вариантами осуществления настоящего изобретения, находится во втянутом положении;
[034] Фиг. 14 представляет собой схематичный вид сбоку самоходной машины, снабженной устройством, препятствующим скольжению опорной лапы, предусмотренным вариантами осуществления настоящего изобретения;
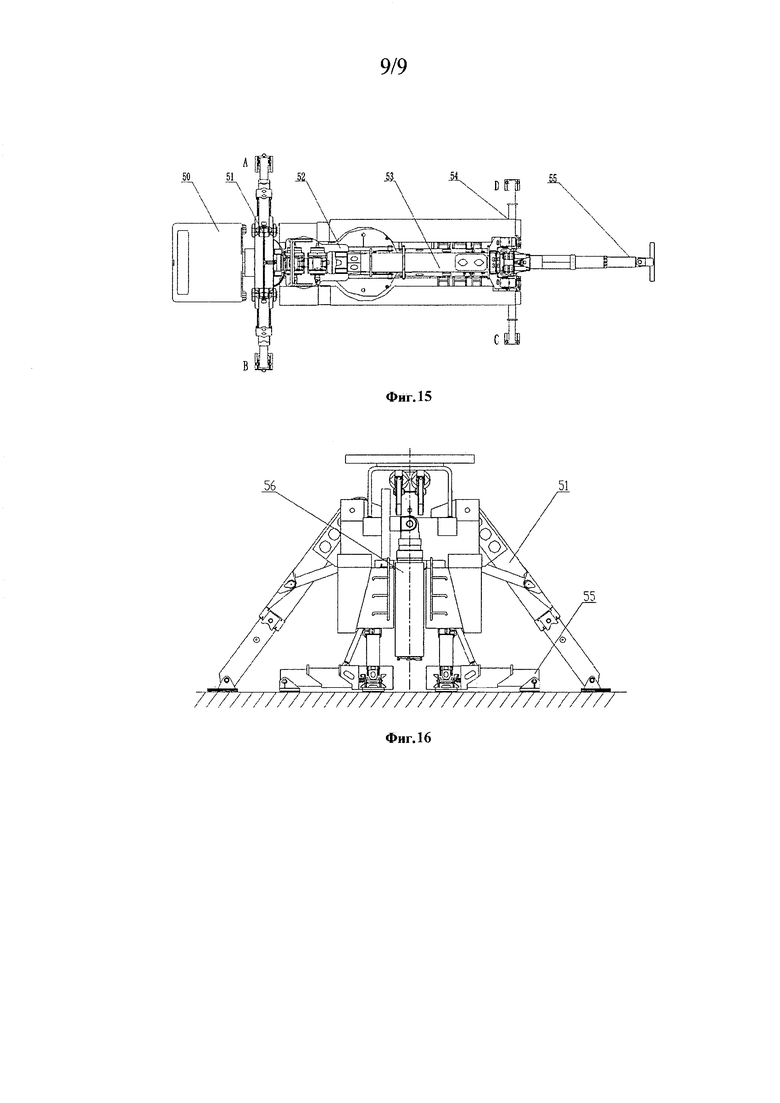
[035] Фиг. 15 представляет собой схематичный чертеж сверху самоходной машины, снабженной устройством, препятствующим скольжению опорной лапы, предусмотренным вариантами осуществления настоящего изобретения;
[036] Фиг. 16 представляет собой схематичный вид сзади самоходной машины, снабженной устройством, препятствующим скольжению опорной лапы, предусмотренным вариантами осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[038] Технические решения (содержащие предпочтительные технические решения) по настоящему изобретению дополнительно описаны в деталях посредством прилагаемых чертежей фиг. 1-фиг. 16 и в режиме перечисления некоторых альтернативных вариантов осуществления настоящего изобретения. Необходимо проиллюстрировать, что любой технический признак в варианте осуществления и техническое решение любого одного или нескольких возможных технических признаков или возможных технических решений для потребности простого описания, все взаимозаменяемые технические признаки и взаимозаменяемые технические решения настоящего изобретения не могут быть перечислены в документе, и это мешает подчеркнуть, что вариант осуществления каждого технического признака является одним из возможных вариантов осуществления, таким образом, специалисты в данной области техники должны понимать, что: любой технический признак и любое техническое решение в варианте осуществления не ограничивают объем охраны настоящего изобретения, и объем охраны настоящего изобретения должен охватывать любое взаимозаменяемое техническое решение, которое может быть представлено специалистом в данной области техники без каких-либо творческих усилий.
[039] Варианты осуществления настоящего изобретения обеспечивают устройство, препятствующее скольжению опорной лапы, позволяющее опорной ноге избежать бокового скольжения, позволяющее деформации опорной ноги быть низкой в течение рабочего процесса, позволяющее опорной ноге быть равномерно нагруженной в каждой части и не подвергать причинение вреда земле, а самоходную машину обеспечить устройством, препятствующим скольжению опорной лапы.
[040] Технические решения, предусмотренные в настоящем изобретении, описаны в деталях в сочетании с фиг. 1-16, и техническое решение, получаемое путем замены какого-либо одного технического средства, предусмотренного в настоящем изобретении, или взаимного объединения двух или более технических средств, предусмотренных настоящим изобретением, должны попадать в объем охраны настоящего изобретения.
[041] Как представлено на фиг. 1-16, устройство 5, препятствующее скольжению опорной лапы, предусмотренное вариантами осуществления настоящего изобретения, содержит основание (предпочтительно желобчатое основание, снабженное желобом) 61, опорную лапу (предпочтительно опорную подлапку 62, представленную на фиг. 1), фиксатор 63 и скользящую направляющую структуру, при этом:
[042] скользящая направляющая структура расположена между опорной лапой и основанием 61, и опорная лапа способна скользить по основанию 61 вдоль заданного направления (заданное направление может содержать как прямое направление, так и обратное направление) через скользящую направляющую структуру. Фиксатор расположен на основании 61 и опорной лапе, и когда опорная лапа скользит в заданное положение фиксации по основанию 61 вдоль заданного направления посредством скользящей направляющей структуры, фиксатор 63 фиксирует опорную лапу на основании 61.
[043] Опорная лапа способна ослаблять усилие на опорную ногу, связанную с ней, в процессе скольжения по основанию 61 вдоль заданного направления посредством скользящей направляющий структуры, таким образом, автоматически регулируя размах опорной ноги, и когда опорная лапа скользит к заданному положению фиксации, фиксатор 63 фиксирует опорную лапу и опорную ногу одновременно.
[044] Скользящая направляющая структура может иметь различные варианты осуществления и предпочтительные варианты осуществления, предусмотренные настоящим изобретением, представлены ниже в деталях, но предпочтительные виды не являются ограничивающими объем охраны настоящего изобретения.
[045] В варианте осуществления, опорная лапа является предпочтительно опорной подлапкой 62 с плитообразной нижней частью, скользящая направляющая структура содержит две направляющих планки 71, неподвижно расположенные на основании 61 и противоположные по расположению, две направляющие канавки 60, противоположные по расположению, образованы между двумя направляющими планками 71 и основанием 61, два выступа, противоположные по расположению в нижней части опорной подлапки 62 зацеплены в две направляющие канавки 60, соответственно, и направление длины двух направляющих канавок 60 является таким же, как заданное направление.
[046] В варианте осуществления, структуры, такие как перекатывающийся шар или перекатывающийся столбик, могут также быть предусмотрены между опорной подлапкой 62 и основанием 61 или направляющими канавками 60, или структуры, такие как удлиненное отверстие или смазочная канавка, могут быть предусмотрены в основании 61 или направляющей канавке 60 для уменьшения силы трения в процессе скольжения опорной подлапки 62.
[047] В другом варианте осуществления скользящей направляющей структуры или варианте осуществления, используемом со скользящей направляющей структурой, скользящая направляющая структура в варианете осуществления может содержать направляющую канавку 69, расположенную в основании 61, и направляющий элемент, неподвижно расположенный в нижней части опорнной подлапки 62, при этом направляющий элемент зацеплен в направляющую канавку 69 и допускает скольжение вдоль направления длины направляющей канавки 69, а направление длины направляющей канавки 69 является таким же, как заданное направление.
[048] Конечно, техническое решение размещения направляющей канавки 69 в опорной подлапке 62 и размещение направляющего элемента на основании 61 и технические решения, когда конструкция опорной подлапки 62 имеет другие формы, также попадают в объем охраны настоящего изобретения.
[049] В варианте осуществления, фиксатор 63 содержит ограничительный столбик 632, упругую структуру и ограничительное отверстие 70, расположенное в основании 61, при этом: осевое направление ограничительного столбика 632 является перпендикулярным по отношению к направлению скольжения опорной лапы. Упругая структура расположена между опорной лапой и ограничительным столбиком 632. Когда опорная лапа скользит в заданное положение фиксации по основанию 61 вдоль заданного направления посредством скользящей направляющей структуры, ограничительный столбик 632 зацепляется в ограничительное отверстие 70 под упругим воздействием упругой структуры. Упругая структура может обеспечить осевое усилие, достаточное, чтобы заставить ограничительный столбик 632 зацепиться в ограничительное отверстие 70 для ограничительного столбика 632.
[050] Конечно, техническое решение без упругой структуры, в котором ограничительный столбик 632 зацепляется в ограничительное отверстие 70 в силу собственной тяжести, или технические решения с использованием других структур вместо упругой структуры также попадают в объем охраны настоящего изобретения.
[051] Упругая структура в варианте осуществления содержит втулку 634, упругий элемент 633 и захватный компонент 631, при этом: упругий элемент 633 является предпочтительно пружиной, обернутой на зацепляющую часть ограничительного столбика 632.
[052] Один конец втулки 634 жестко соединен с опорной лапой, предпочтительно один конец втулки 634 приварен к установочной пластине 635, и затем втулка 634 и установочная пластина 635 жестко соединяются с опорной лапой посредством винта 67, проходящего через установочную пластину 635. Препятствующий выпадению край полностью соединен с втулкой, предпочтительно и с внутренним диаметром, меньшим, чем внутренний диаметр втулки 634, расположенный на другом конце втулки 634.
[053] Ограничительный столбик 632 содержит концевую рабочую часть и зацепляемую часть, причем внешний диаметр концевой рабочей части больше, чем у зацепляемой части, при этом зацепляемая часть зацеплена во втулке 634, а захватный компонент 631, используемый для захватывания рукой пользователя, расположен на участке зацепляемой части, продолжающемся за втулку 634 и препятствующий выпадению край; захватный компонент 631 является предпочтительно вытяжным кольцом или ручкой 65, соединенной с участком зацепляемой части, продолжающимся за препятствующий выпадению край, и представлен как вытяжное кольцо на чертежах.
[054] Упругий элемент 633 расположен во втулке 634 и упирается в препятствующий выпадению край и концевую рабочую часть, соответственно.
[055] Вышеприведенная структура имеет преимущество в удобстве съемной установки. Пользователь может извлечь ограничительный столбик 632 из ограничительного отверстия 70, потянув вытяжное кольцо рукой, таким образом, освобождая фиксацию фиксатора 63 опорной лапы.
[056] В качестве альтернативы, технические решения с использованием других упругих элементов вместо пружины также попадают в объем охраны настоящего изобретения.
[057] В варианте осуществления, устройство 5, препятствующее скольжению опорной лапы, дополнительно содержит по меньшей мере одну препятствующую выпадению пластину 72, износостойкие амортизирующие блоки 64 (предпочтительно резиновые амортизирующие блоки) и ограничительный элемент (предпочтительно винт 66), предпочтительно устройство 5, препятствующее скольжению опорной лапы, предусмотренное вариантом осуществления, содержит все их три, при этом:
[058] препятствующая выпадению пластина 72 неподвижно соединена с краем основания 61, и направление длины препятствующей выпадению пластины 72 является перпендикулярным по отношению к направлению скольжения опорной лапы.
[059] Когда опорная лапа скользит в заданное положение фиксации по основанию 61 вдоль заданного направления посредством скользящей направляющей структуры, опорная лапа упирается в препятствующую выпадению пластину 72.
[060] Препятствующая выпадению пластина 72 способна более эффективно предотвращать выпадение опорной лапы из основания 61 вдоль направления ее скольжения и предотвращать повреждение скользящей направляющей структуры от попадания пыли или земли на основание 61.
[061] Конечно, технические решения с использованием других материалов для изготовления износостойких амортизирующих блоков 64 также попадают в объем охраны настоящего изобретения.
[062] Количество износостойких амортизирующих блоков 64 (предпочтительно резиновых амортизирующих блоков) в варианте осуществления предпочтительно равно по меньшей мере двум, и износостойкие амортизирующие блоки равномерно распределены по нижней поверхности основания 61 и жестко соединены с нижней поверхностью основания 61, и неподвижное соединение предпочтительно реализуется посредством винта 68.
[063] Износостойкие амортизирующие блоки 64 способны повышать противоскользящую характеристику основания 61 и снижать давление на основание 61.
[064] В варианте осуществления, ограничительный элемент жестко соединен с основанием 61, и когда опорная лапа скользит к заданному втянутому положению по основанию 61 вдоль заданного направления посредством скользящей направляющей структуры, опорная лапа упирается в ограничительный элемент. Ограничительный элемент предпочтительно реализуется посредством винта 66. Ограничительный элемент способен предотвращать выпадение опорной лапы из основания 61. В варианте осуществления направление скольжения опорной лапы к заданному положению фиксации является противоположным к направлению скольжения опорной лапы к заданному втянутому положению, однако независимо от того, скользит опорная лапа вперед или обратно, направление скольжения ее следует понимать как заданное направление.
[065] В варианте осуществления, ручка 65 дополнительно соединена с препятствующей выпадению пластиной 72. Относительные положения основания 61 и опорной лапы могут быть изменены с помощью ручки 65, и опорная лапа может быть доведена до заданного втянутого положения посредством вытягивания основания 61 вдоль направления скольжения опорной лапы.
[066] Конечно, техническое решение, не размещающее ручку 65 или не использующее ручку, а вытяжное кольцо вместо ручки 65, также попадает в объем охраны настоящего изобретения.
[067] Как представлено на фиг. 1-фиг. 16, самоходная машина, предусмотренная вариантами осуществления настоящего изобретения, содержит неподвижную раму, опорную ногу 51 А-образной формы, телескопические силовые механизмы и устройство 5, препятствующее скольжению опорной лапы, предусмотренное любым техническим решением вариантов осуществления настоящего изобретения, при этом: неподвижная рама является предпочтительно структурой, жестко соединенной или объединенной с шасси самоходной машины, следовательно, неподвижная рама в варианте осуществления может также быть названа как неподвижная рама шасси.
[068] На фиг. 1-фиг. 16, α является углом поворота опорной ноги A-образной формы, S является поперечным пролетом опорной ноги А-образной формы, S1 является расстоянием между верхними точками шарнира опорной ноги А-образной формы, А и В являются точками опорных площадок передней опорной ноги самоходной машины, и С и D являются точками опорных площадок задней опорной ноги самоходной машины.
[069] Опорная нога 51 А-образной формы содержит левую телескопическую опорную ногу и правую телескопическую опорную ногу, при этом левая телескопическая опорная нога и правая телескопическая опорная нога содержат основную ногу, шарнирно соединенную с неподвижной рамой, и подвижную ногу, скользяще соединенную с основной ногой, соответственно. Ссылочные позиции, которые представлены на чертежах: основная нога 1 и подвижная нога 2 левой телескопической опорной ноги и основная нога 14 правой телескопической опорной ноги.
[070] Телескопические силовые механизмы расположены между соответствующими подвижными ногами левой телескопической опорной ноги и правой телескопической опорной ноги и неподвижной рамой, и телескопические силовые механизмы способны приводить в действие подвижные ноги для вращения относительно неподвижной рамы и осуществлять вытягивающее или втягивающее движение относительно основных ног, которые с возможностью скольжения соединены с подвижными ногами.
[071] Опорная лапа устройства 5, препятствующего скольжению опорной лапы, шарнирно связана с нижней подвижной ногой 2.
[072] Опорная лапа способна автоматически регулировать размах опорной ноги в процессе скольжения по основанию 61 и устойчиво передвигаться без толчков, тем временем фиксатор 63 способен осуществить размещение опорной лапы и опорной ноги, соединенной с ней, что исключает возникновение явления бокового скольжения.
[073] В варианте осуществления, левая телескопическая опорная нога и правая телескопическая опорная нога по меньшей мере дополнительно содержат один многозвенный механизм, ограничительный экран 6 и ползун 7, соответственно, предпочтительно, левая телескопическая опорная нога и правая телескопическая опорная нога содержат все их три соответственно, при этом:
[074] многозвенный механизм содержит первое звено (предпочтительно длинное звено) 8 и второе звено (предпочтительно короткое звено) 10.
[075] Телескопические силовые механизмы расположены между левой и правой телескопическими опорными ногами и неподвижной рамой, соответственно, а каждый из телескопических силовых механизмов содержит телескопический масляный цилиндр (или так называемый вертикальный телескопический масляный цилиндр) 13 и масляный цилиндр 9 переменной амплитуды.
[076] Одна гильза цилиндра и поршневой шток телескопического масляного цилиндра 13 соединен с неподвижной рамой, а другая гильза цилиндра и поршневой шток телескопического масляного цилиндра 13 соединен с подвижной ногой 2.
[077] Один конец каждого первого звена 8 и второго звена 10 шарнирно соединен с одной гильзой цилиндра и поршневым штоком масляного цилиндра 9 переменной амплитуды.
[078] Другой конец первого звена 8 шарнирно соединен с основной ногой 1.
[079] Другая одна гильза цилиндра и поршневой шток масляного цилиндра 9 переменной амплитуды и другой конец второго звена 10 шарнирно соединены в различных местах неподвижной рамы, а масляный цилиндр 9 переменной амплитуды установлен между первым звеном 8 и вторым звеном 10.
[080] В варианте осуществления, ограничительные экраны 6 неподвижно расположены на соответствующих основных ногах 1 левой телескопической опорной ноги и правой телескопической опорной ноги, а углубленные участки расположены на нижних частях ограничительных экранов 6, выпуклые участки (выпуклые участки предпочтительно в виде треугольной пластины, соответственно) неподвижно расположены в верхней части опорной лапы, а телескопические силовые механизмы способны приводить в действие подвижные ноги 2 и опорную лапу для перемещения в положение, где выпуклые участки зацепляются в углубленные участки.
[081] Когда опорная нога 51 А-образной формы находится во втянутом состоянии, выпуклые участки опорной лапы зацепляются с углубленными участками на нижних частях ограничительных экранов 6, таким образом, фиксация опорной лапы и всего устройства 5, препятствующего скольжению опорной лапы, может быть реализована, и раскачивание устройства 5, препятствующего скольжению опорной лапы, на опорной ноге 51 А-образной формы может быть устранено.
[082] В варианте осуществления ползуны 7 расположены между соответствующими основными ногами и подвижными ногами левой телескопической опорной ноги и правой телескопической опорной ноги, а основные ноги скользяще соединены с подвижными ногами через ползуны 7.
[083] Ползуны 7 способны уменьшить силу трения между основными ногами и подвижными ногами. Ползуны 7 установлены на четырех контактных поверхностях между подвижными ногами и основными ногами, с регулируемыми зазорами. Ползуны 7 (изготовлены из нейлона) установлены на четырех поверхностях, таким образом, с одной стороны, обеспечиваются минимальные зазоры между подвижными ногами и основными ногами, таким образом, когда подвижные ноги несут нагрузку, структурные элементы смягчают нагрузку (содержащие низкую деформацию структурные элементы устраняют концентрацию напряжений, повышают нагрузку областей структурных элементов, снижают нагрузку и т.п.).
[084] Конечно, технические решения применения устройства 5, препятствующего скольжению опорной лапы, предусмотренные настоящим изобретением, с другими опорными ногами или машинами, исключающими опорную ногу 51 А-образной формы или самоходную машину, также попадают в объем охраны настоящего изобретения.
[085] Опорная нога А-образной формы в варианте осуществления содержит левый участок и правый участок, которые являются симметричными, принимая левую телескопическую опорную ногу в качестве примера, левая телескопическая опорная нога содержит основную ногу 1, соединенную с шасси 50 и способную отклоняться вокруг осевого пальца 18, и подвижную ногу 2, способную вытягиваться или втягиваться в основную ногу 1, при этом основная нога 1 и подвижная нога 2 соединены телескопическим масляным цилиндром 13, гильза цилиндра и поршневой шток телескопического масляного цилиндра 13 закреплены в неподвижной точке а на верхнем конце основной ноги и неподвижной точке с на нижнем конце подвижной ноги, соответственно, а ползун 7 установлен между подвижной ногой 2 и основной ногой 1, обеспечивая тем самым высокую нагрузочную характеристику во время вытягивания или втягивания подвижной ноги; а неподвижная точка d на нижней концевой части подвижной ноги 2 шарнирно соединена с устройством 5, препятствующим скольжению опорной лапы, посредством осевого пальца 4, и поворот основной ноги приводится в действие масляным цилиндром 9 переменной амплитуды.
[086] Гильза цилиндра масляного цилиндра 9 переменной амплитуды (или так называемый нижний конец масляного цилиндра) и неподвижная рама шасси шарнирно соединены в точке f, поршневой шток масляного цилиндра переменной амплитуды (или так называемый верхний конец масляного цилиндра), первое звено (предпочтительно длинное звено) 8 и второе звено (предпочтительно короткое звено) 10 шарнирно соединены в точке е, другой конец первого звена 8 и основная нога 1 шарнирно соединены в точке b, а другой конец второго звена 10 шарнирно соединен с неподвижной рамой шасси, с тем, чтобы образовать четырехзвенный механизм для реализации угла α поворота основной ноги 1.
[087] Принцип работы заключается в следующем: когда рабочее положение достигнуто, источник масла, обеспеченный гидравлическим насосом самоходной машины для подачи масла к масляному цилиндру 9 переменной амплитуды и четырехзвенному механизму, приводится в действие для расширения сначала основной ноги 1 левой телескопической опорной ноги, угол α переменной амплитуды находится от 0 до α, расстояние между верхними шарнирными точками левой основной ноги и правой основной ноги является S1, а расстояние от поверхности земли верхних шарнирных точек перед расширением опорной ноги является L, а затем гидравлический насос самоходной машины поставляет масло в телескопический масляный цилиндр 13, в данный момент подвижная нога 2 устанавливается на землю посредством телескопической поддержки, самоходная машина поднимается до определенной высоты, и нагрузка самоходной машины поддерживается опорной ногой, в процессе подъема обычная опорная нога А-образной формы создает боковое скольжение, и величина скольжения является t=(S-S1)/2-tanα*L, таким образом, подвижная нога имеет плохую нагрузочную характеристику во время процесса поддержки, тем временем создается большая толчковая нагрузка на все транспортное средство, непосредственно влияющая на устойчивость всего транспортного средства, даже случаи травм могут быть причинены в тяжелых ситуациях, и склонность бокового скольжения к разрушению земли является высокой; устройство 5, препятствующее скольжению опорной лапы, которым оснащена препятствующая боковому скольжению опорная нога А-образной формы по настоящему изобретению, способно предотвращать боковое скольжение опорной ноги после установки подвижной ноги 2 на землю посредством поддержки, телескопический масляный цилиндр 13 продолжает вытягиваться или втягиваться, устройство 5, препятствующее скольжению опорной лапы, может автоматически регулировать размах опорной ноги в соответствии с высотой подъема, весь процесс стабильно проходит, не вызывая толчков на весь автомобиль, таким образом, обеспечивая устойчивость и безопасность всего транспортного средства.
[088] Самоходная машина, предусмотренная вариантами осуществления настоящего изобретения, является предпочтительно автомобилем технической помощи, при этом самоходная машина содержит шасси 50, подъемный механизм 52, поворотный механизм 53, подъемную стрелу 54 и опорный механизм 56, шасси 50 содержит по меньшей мере одну переднюю ось 57 и по меньшей мере одну заднюю ось 58. Подъемный механизм 52, поворотный механизм 53, подъемная стрела 54 и опорный механизм 56 установлены на шасси 50, подъемный механизм 52 присоединен над поворотным механизмом 53, подъемная стрела 54 расположена позади поворотного механизма 53, четыре телескопические опорные ноги установлены на шасси 50, и две или более из четырех опорных ног предназначены для опорной ноги 51 А-образной формы.
[089] Во время работы автомобиля технической помощи, опорные ноги полностью или частично вытягиваются для расширения края шасси 50 в силу толкающего действия масляного цилиндра 9 переменной амплитуды и телескопического масляного цилиндра 13; а в процессе движения автомобиля технической помощи опорные ноги полностью втягиваются, и ширина не превышает ширины автомобиля технической помощи.
[090] Принцип работы заключается в следующем: после того, как автомобиль технической помощи прибывает к месту эксплуатации, опорные ноги вытягиваются в соответствующие положения посредством соответствующего механизма расширения, и источник масла обеспечивает гидравлическим насосом подачу масла к масляному цилиндру 9 переменной амплитуды, при этом амплитуды основной ноги 1 левой телескопической опорной ноги и основной ноги 14 правой телескопической опорной ноги изменяются к заданным положениям под действием масляного цилиндра 9 переменной амплитуды, затем масло подается к телескопическому масляному цилиндру 13, подвижная нога 2 вытягивается, устройство 5, препятствующее скольжению опорной лапы, устанавливается на землю и автоматически регулирует размах, шасси 50 поддерживается для образования устойчивой опоры, и автомобиль технической помощи начинает соответствующую работу; после того как работа автомобиля технической помощи закончена, опорные ноги соответственно втягиваются, и ограничительные экраны 6 на основной ноге 1 левой телескопической опорной ноги и основной ноге 14 правой телескопической опорной ноги фиксируют устройство, препятствующее скольжению опорной лапы.
[091] Процесс работы выглядит следующим образом: согласно вышеприведенной самоходной машине, предусмотренной настоящим изобретением, а именно автомобилю технической помощи, прежде чем опорная нога 51 А-образной формы вытянута, пользователь тянет за основание 61 во внешнюю сторону, и затем опорная нога 51 А-образной формы опирается, и во время процесса опорная подлапка 62 перемещается по направлению к внешней стороне вдоль основания 61, и размах опорной ноги регулируется автоматически до тех пор, пока опорная нога полностью не вытянется, в этот момент фиксатор 63 автоматически фиксирует опорную подлапку 62 и основание 61; после того как работа автомобиля технической помощи закончена, масляный цилиндр 9 переменной амплитуды и телескопический масляный цилиндр 13 втягиваются, ограничительный экран 6 на основной ноге фиксирует устройство 5, препятствующее скольжению опорной лапы, и раскачивание опорной подлапки 62 ограничивается во время процесса движения транспортного средства, тем самым улучшая безопасность движения. Согласно автомобилю технической помощи по настоящему изобретению, количество и способ установки опорных ног могут быть соответственно подобраны, таким образом отвечая конкретным конструктивным и эксплуатационным требованиям, поэтому автомобиль технической помощи по настоящему изобретению имеет широкий диапазон применений и высокую универсальность.
[092] Согласно любому техническому решению, раскрытому в настоящем изобретении, если не указано иное, если раскрывается диапазон значений, раскрытый диапазон значений является предпочтительным диапазоном значений, и любому специалисту в данной области техники должно быть понятно, что: предпочтительный диапазон значений является только значениями с явными техническими эффектами или репрезентативностью из многих реализуемых значений. Поскольку существует много значений, которые не могут быть перечислены, настоящее изобретение раскрывает часть значений для иллюстрации технических решений по настоящему изобретению, кроме того, указанные выше значения не должны создавать ограничений на объем охраны настоящего изобретения.
[093] В то же время, если настоящее изобретение раскрывает или имеет отношение к компонентам или структурным элементам, которые взаимно жестко соединены, то, если не указано иное, жесткое соединение может быть понято как:
[094] разъемное жесткое соединение (например, соединение с помощью болта или винта), или может быть понято как: неразъемное жесткое соединение (например, клепкой и сваркой), конечно, взаимное жесткое соединение может также быть заменено цельной структурой (например, цельно образованной и изготовленной литьем, ковкой или процессом впрыска) (за исключением случая, когда единый процесс образования, очевидно, не может быть принят).
[095] Кроме того, в любом техническом решении, раскрытом в настоящем изобретении, если существуют термины для представления взаимного расположения или формы, то, если не указано иное, значения применяемых терминов для представления взаимного расположения или формы содержат состояния или формы приблизительно, аналогично или близко к этому. Любой компонент, предусмотренный настоящим изобретением, может быть образован путем сборки множества независимых составляющих или независимых компонентов, изготовленных посредством единого процесса образования.
[096] Окончательно следует пояснить, что: вышеизложенные варианты осуществления только используются для иллюстрации технических решений настоящего изобретения, а не для его ограничения; хотя настоящее изобретение проиллюстрировано подробно со ссылкой на предпочтительные варианты осуществления, специалисты в данной области техники должны понимать, что: модификации могут еще быть выполнены на конкретных вариантах осуществления настоящего изобретения, или эквивалентные замены могут быть проведены на части технических признаков без отхода от сущности технических решений настоящего изобретения, и что модификации и эквивалентные замены должны быть включены в рамки технических решений, заявленных в настоящем изобретении.
Список ссылочных позиций
| название | год | авторы | номер документа |
|---|---|---|---|
| ГОРИЗОНТАЛЬНЫЙ ПЯТИОСЕВОЙ ОБРАБАТЫВАЮЩИЙ ЦЕНТР С ОПРОКИДНОЙ ПОЛКОЙ | 2020 |
|
RU2838433C2 |
| ОБНАРУЖИВАЮЩАЯ, РОЮЩАЯ, ПОДДЕРЖИВАЮЩАЯ, АНКЕРУЮЩАЯ И ПЕРЕДАЮЩАЯ КОМПЛЕКСНАЯ МАШИННАЯ СИСТЕМА ДЛЯ БЫСТРОГО РЫТЬЯ СКВАЖИНЫ И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2020 |
|
RU2748264C1 |
| ДВУНАПРАВЛЕННОЕ ТОРМОЗНОЕ УСТРОЙСТВО С АЭРОДИНАМИЧЕСКИМ СОПРОТИВЛЕНИЕМ | 2020 |
|
RU2773066C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ КРЕСЛО-КОЛЯСКА | 2018 |
|
RU2767548C1 |
| ДЕМПФЕР СО СКРЫТОЙ НАПРАВЛЯЮЩЕЙ | 2021 |
|
RU2799287C1 |
| СКОЛЬЗЯЩАЯ МУФТА | 2017 |
|
RU2751521C2 |
| УЗЕЛ СИДЕНЬЯ ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ МОТОРНОГО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И СПИНКА СИДЕНЬЯ ДЛЯ МОТОРНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2681827C2 |
| ГУСЕНИЧНАЯ СЦЕПНАЯ КОНСТРУКЦИЯ ДЛЯ КОЛЕСНОГО КРАНА И КОЛЕСНЫЙ КРАН | 2014 |
|
RU2672324C1 |
| АУТРИГЕР | 1997 |
|
RU2124993C1 |
| УСТАНОВКА ДЛЯ ОБНАРУЖЕНИЯ ДЕФЕКТОВ С ФУНКЦИЕЙ ПАРАЛЛЕЛЬНОГО ПОДДОМКРАЧИВАНИЯ, ВЫПОЛНЕННАЯ С ВОЗМОЖНОСТЬЮ ОБНАРУЖЕНИЯ ДЕФЕКТОВ БЕЗ ДЕМОНТАЖА КОЛЕС | 2014 |
|
RU2651934C1 |
Изобретение относится к устройствам, препятствующим скольжению опорной лапы для самоходной машины. Устройство, препятствующее скольжению опорной лапы, содержит основание, опорную лапу, фиксатор и скользящую направляющую структуру. Скользящая направляющая структура расположена между опорной лапой и основанием, и опорная лапа допускает скольжение по основанию вдоль заданного направления посредством скользящей направляющей структуры, а фиксатор расположен на основании и опорной лапе, и, когда опорная лапа скользит к заданному положению фиксации по основанию вдоль заданного направления посредством скользящей направляющей структуры, фиксатор способен фиксировать опорную лапу на основании. Самоходная машина содержит неподвижную раму, опорную ногу А-образной формы, телескопические силовые механизмы и устройство, препятствующее скольжению опорной лапы. Достигается улучшение характеристики противодействия боковому скольжению опорной ноги. 2 н. и 8 з.п. ф-лы, 16 ил.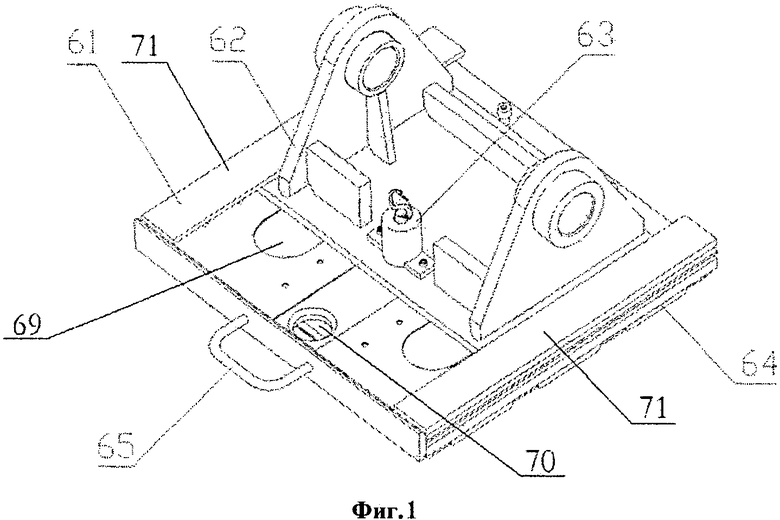
1. Устройство, препятствующее скольжению опорной лапы, содержащее основание, опорную лапу, фиксатор и скользящую направляющую структуру, в котором:
скользящая направляющая структура расположена между опорной лапой и основанием, и опорная лапа способна скользить по основанию вдоль заданного направления посредством скользящей направляющей структуры; и
фиксатор расположен на основании и опорной лапе, и, когда опорная лапа скользит к заданному положению фиксации по основанию вдоль заданного направления посредством скользящей направляющей структуры, фиксатор способен фиксировать опорную лапу на основании.
2. Устройство по п.1, в котором опорная лапа имеет опорную подлапку с плитообразной нижней частью, скользящая направляющая структура содержит две направляющие планки, неподвижно расположенные на основании и противоположные по расположениям, две направляющие канавки, противоположные по расположениям, образованы между двумя направляющими планками и основанием, два выступа, противоположные по расположениям, на нижней части опорной подлапки зацеплены в две направляющие канавки, соответственно, и направление длины двух направляющих канавок является таким же, как заданное направление.
3. Устройство по п.1 или 2, в котором скользящая направляющая структура содержит направляющую канавку, расположенную в основании, и направляющий элемент, неподвижно расположенный на нижней части опорной подлапки, при этом направляющий элемент зацеплен в направляющую канавку и способен скользить вдоль направления длины направляющей канавки, а направление длины направляющей канавки является таким же, как заданное направление.
4. Устройство по п.1, в котором фиксатор содержит ограничительный столбик, упругую структуру и ограничительное отверстие, расположенное на основании, при этом осевое направление ограничительного столбика является перпендикулярным к направлению скольжения опорной лапы;
упругая структура расположена между опорной лапой и ограничительным столбиком, причем,
когда опорная лапа скользит к заданному положению фиксации по основанию вдоль заданного направления посредством скользящей направляющей структуры, ограничительный столбик зацепляется в ограничительное отверстие под упругим воздействием упругой структуры.
5. Устройство по п.4, в котором упругая структура содержит втулку, упругий элемент и захватную часть, при этом
один конец втулки неподвижно соединен с опорной лапой, а препятствующий выпадению край полностью соединен с втулкой и обеспечен внутренним диаметром, который меньше, чем внутренний диаметр втулки, расположенный на другом конце втулки;
ограничительный столбик содержит концевую рабочую часть и зацепляющую часть, внешний диаметр концевой рабочей части больше, чем у зацепляющей части, при этом зацепляющая часть зацеплена во втулку, а захватный компонент, используемый для захвата рукой пользователя, расположен на участке зацепляющей части, продолжающемся за втулку и препятствующий выпадению край; и
упругий элемент расположен во втулке и упирается против препятствующего выпадению края и концевой рабочей части, соответственно.
6. Устройство по п.5, в котором упругий элемент является пружиной, обернутой на зацепляющую часть ограничительного столбика, а захватный компонент является вытяжным кольцом или ручкой, соединенной с участком зацепляющей части, продолжающимся за втулку и препятствующий выпадению край.
7. Устройство по п.1, дополнительно содержащее по меньшей мере одну препятствующую выпадению пластину, износостойкие амортизирующие блоки и ограничительный элемент, при этом
препятствующая выпадению пластина неподвижно соединена с краем основания, и направление длины препятствующей выпадению пластины является перпендикулярным к направлению скольжения опорной лапы;
когда опорная лапа скользит к заданному положению фиксации по основанию вдоль заданного направления посредством скользящей направляющей структуры, опорная лапа упирается в препятствующую выпадению пластину;
количество износостойких амортизирующих блоков равно по меньшей мере двум, и износостойкие амортизирующие блоки равномерно распределены по нижней поверхности основания и неподвижно соединены с нижней поверхностью основания; и
ограничительный элемент неподвижно соединен с основанием, и, когда опорная лапа скользит к заданному втянутому положению по основанию вдоль заданного направления посредством скользящей направляющей структуры, опорная лапа упирается в ограничительный элемент.
8. Устройство по п.7, в котором ручка дополнительно соединена с препятствующей выпадению пластиной.
9. Самоходная машина, содержащая неподвижную раму, опорную ногу А-образной формы, телескопические силовые механизмы и устройство, препятствующее скольжению опорной лапы, согласно любому из пп.1-8, в которой:
опорная нога А-образной формы содержит левую телескопическую опорную ногу и правую телескопическую опорную ногу, при этом левая телескопическая опорная нога и правая телескопическая опорная нога содержат основную ногу, шарнирно соединенную с неподвижной рамой, и подвижную ногу, с возможностью скольжения соединенную с основной ногой, соответственно;
телескопические силовые механизмы расположены между соответствующими подвижными ногами левой телескопической опорной ноги и правой телескопической опорной ноги и неподвижной рамой, и телескопические силовые механизмы способны приводить в действие подвижные ноги для вращения относительно неподвижной рамы и осуществлять вытягивающее или втягивающее движение относительно основных ног, которые с возможностью скольжения соединены с подвижными ногами; и
опорную лапу устройства, препятствующего скольжению опорной лапы, шарнирно соединенную с нижней частью подвижной ноги.
10. Самоходная машина по п.9, в которой левая телескопическая опорная нога и правая телескопическая опорная нога содержит по меньшей мере один многозвенный механизм, ограничительный экран и ползун, соответственно, при этом
многозвенный механизм содержит первое звено и второе звено;
телескопические силовые механизмы расположены между левой и правой телескопическими опорными ногами и неподвижной рамой, соответственно, и каждый из телескопических силовых механизмов содержит телескопический масляный цилиндр и масляный цилиндр переменной амплитуды;
одна гильза цилиндра и поршневой шток телескопического масляного цилиндра соединен с неподвижной рамой, а другая гильза цилиндра и поршневой шток телескопического масляного цилиндра соединен с подвижной ногой;
один конец каждого первого звена и второго звена шарнирно соединен с одной гильзой цилиндра и поршневым штоком масляного цилиндра переменной амплитуды.
другой конец первого звена шарнирно соединен с основной ногой;
другая одна гильза цилиндра и поршневой шток масляного цилиндра переменной амплитуды, и другой конец второго звена шарнирно соединены в различных местах неподвижной рамы, а масляный цилиндр переменной амплитуды установлен между первым звеном и вторым звеном.
ограничительный экран неподвижно расположен на соответствующих основных ногах левой телескопической опорной ноги и правой телескопической опорной ноги, и углубленные участки расположены на нижних частях ограничительных экранов, выпуклые участки неподвижно расположены на верхней части опорной лапы, а телескопические силовые механизмы способны приводить в движение подвижные ноги и опорную лапу для перемещения в положение, где выпуклые участки зацепляются в углубленные участки; и
ползуны расположены между соответствующими основными ногами и подвижными ногами левой телескопической опорной ноги и правой телескопической опорной ноги, а основные ноги с возможностью скольжения соединены с подвижными ногами посредством ползунов.
| JP 2011168148 A, 01.09.2011 | |||
| JP 2001047981 A, 20.02.2001 | |||
| ОПОРНО-ВЫВЕШИВАЮЩЕЕ УСТРОЙСТВО ДЛЯ ПОСЕВНОЙ ТЕХНИКИ | 2004 |
|
RU2269440C1 |
| JP 2000327268 A, 28.11.2000. | |||

