Область техники
Изобретение относится к области машиностроения, а именно к горизонтальному пятиосевому обрабатывающему центру с опрокидной полкой.
Уровень техники
С быстрым развитием аэрокосмической промышленности Китая, возникает необходимость обрабатывать различные детали с полостью пластины, для того чтобы повысить эффективность и точность обработки, большинство станков используют заготовку, вертикально зажатую в обрабатывающей станции, и фрезу, горизонтально установленную на шпинделе станка. В настоящее время горизонтальный пятиосевой обрабатывающий центр использует заготовки, непосредственно загруженные в обрабатывающую станцию, загрузочные работы являются сложными для выполнения, особенно для обработки аэроинженерных структурных деталей с большой скоростью удаления резания, что может значительно снизить эффективность производства, и не сможет удовлетворить отечественную аэрокосмическую промышленность по спросу на эффективное и высокоточное оборудование для обработки деталей из алюминиевых сплавов. Раскрытие сущности изобретения
Настоящее изобретение решает вышеуказанную проблему, исследуя и разрабатывая горизонтальный пятиосевой обрабатывающий центр с опрокидной полкой. В настоящем изобретении используют следующие технические средства.
Горизонтальный пятиосевой обрабатывающий центр с опрокидной полкой, включающий опорное основание, станок, установленный на опорном основании, и колонну, установленную на опорном основании, при этом станок и колонна неподвижно соединены соединительным рычагом, отличающийся тем, что опорное основание снабжено устройством опрокидной полки, которое включает опрокидную полку, шарнирно закрепленную на опорном основании в нижней части, и первый приводной блок, выполненный с возможностью приведения опрокидной полки в движение в опрокинутом состоянии, при этом станок имеет на стороне, обращенной к колонне, X-направленный ползун, выполненный с возможностью скольжения в направлении X по станку, и второй приводной блок, выполненный с возможностью приведения в движение Х-направленного ползуна, опрокидная полка снабжена третьим приводным блоком, выполненным с возможностью приведения в движение рабочего стола для изменения положения между опрокидной полкой и Х-направленным ползуном, при этом Х-направленный ползун снабжен стопорным механизмом, выполненным с возможностью фиксации рабочего стола, а колонна снабжена Y-направленным ползуном с Z-направленным ползуном, имеющим фрезерную головку.
В предпочтительном варианте осуществления опрокидная полка снабжена первой опорной направляющей в нижней части, Х-направленный ползун снабжен второй опорной направляющей в нижней части, нижняя задняя часть рабочего стола снабжена скользящими роликами, выполненными с возможностью скольжения по первой опорной направляющей и второй опорной направляющей, верхняя часть рабочего стола снабжена ограничительным желобом, при этом верхняя часть опрокидной полки снабжена первым ограничительным роликом, который выполнен с возможностью вхождения в ограничительный желоб и скольжения относительно указанного желоба, а также ограничения рабочего стола относительно опрокидной полки, верхняя часть Х-направленного ползуна снабжена вторым ограничительным роликом, который выполнен с возможностью вхождения и скольжения по ограничительному желобу, а также ограничения рабочего стола на Х-направленном ползуне.
В еще одном предпочтительном варианте осуществления первый приводной блок включает винт опрокидной полки, шарнирно соединенный с опорным основанием и приводным двигателем опрокидной полки, приводящим во вращение винт опрокидной полки, при этом опрокидная полка снабжена винтовой гайкой на верхней части торцевой поверхности опрокидной полки, которая подходит к винту опрокидной полки.
В еще одном предпочтительном варианте осуществления второй приводной блок включает в себя стойку, закрепленную на станке в направлении X, шестерню, установленную на Х-направленном ползуне в направлении X, и электродвигатель, приводящий в движение шестерню, при этом шестерня входит в зацепление со стойкой.
В еще одном предпочтительном варианте осуществления третий приводной блок включает червяк и двигатель для привода червяка, при этом червяк установлен вдоль направления X, а задняя часть рабочего стола снабжена роликами, расположенными вдоль направления X, с зазорами между соседними роликами для взаимодействия с червяком с обеспечением возможности толкания роликов червяком при его вращении с приведением в движение рабочего стола.
В еще одном предпочтительном варианте осуществления стопорный механизм включает Т-образный блок, опорный блок, тягу, тарельчатую пружину, пружину и четвертый приводной блок для обеспечения осевого перемещения тяги, при этом опорный блок закреплен на Х-направленном ползуне, тяга проходит через Т-образный блок и опорный блок, а конец тяги имеет первый радиальный выступ, способный тянуть Т-образный блок, пружина установлена между Т-образным блоком и опорным блоком (30), а тарельчатая пружина установлена на тяге, тарельчатая пружина и Т-образной блок расположены на внешней и внутренней сторонах опорного блока соответственно, а тяга имеет второй радиальный выступ, выполненный с возможностью ограничения тарельчатой пружины на тяге, концы тарельчатой пружины соответственно находятся в контакте с опорным блоком и вторым радиальным выступом, а задняя часть рабочего стола имеет Т-образный стопорный желоб для установки в Т-образный блок.
В еще одном предпочтительном варианте осуществления Y-направленный ползун расположен на одной из сторон колонны, а магазин инструментов установлен на другой стороне колонны, при этом на стороне колонны, на которой расположен Y-направленный ползун, выполнены первый Y-направленный винт, второй Y-направленный винт и первый Y-направленный приводной двигатель, а также второй Y- направленный приводной двигатель, выполненный с возможностью приведения в движение первого Y-направленного винта и второго Y-направленного винта соответственно, Y-направленный ползун установлен на первом Y-направленном винте и втором Y-направленном винте, Y-направленный ползун снабжен двумя Z-направленными направляющими, обе стороны Z-направленного ползуна установлены на Z-направленных направляющих посредством Z-ползунов, при этом фрезерная головка представляет собой фрезерную головку, выполненную с возможностью качания.
По сравнению с известным уровнем техники горизонтальный пятиосевой обрабатывающий центр с опрокидной полкой, описанный в настоящем изобретении, имеет следующие преимущества:
1. Установка устройства опрокидной полки, приведение опрокидной полки в горизонтальное и вертикальное изменение положения, приведение опрокидной полки в горизонтальное состояние для монтажа и демонтажа заготовки, приведение опрокидной полки в вертикальное состояние для перемещения рабочего стола к станку для обработки заготовок, что значительно повышает эффективность загрузки и разгрузки.
2. Примененная конструкция с двойным ходовым винтом и двойной направляющей структурой, с хорошей жесткостью шпинделя, особенно подходит для эффективной и высокоточной обработки деталей авиадвигателей и цилиндрических деталей из алюминиевого сплава.
3. Форма угловой фрезерной головки, выполненной с возможностью качания, и разумная структурная конфигурация всего станка гарантируют точность и эффективность обработки.
Краткое описание графических материалов
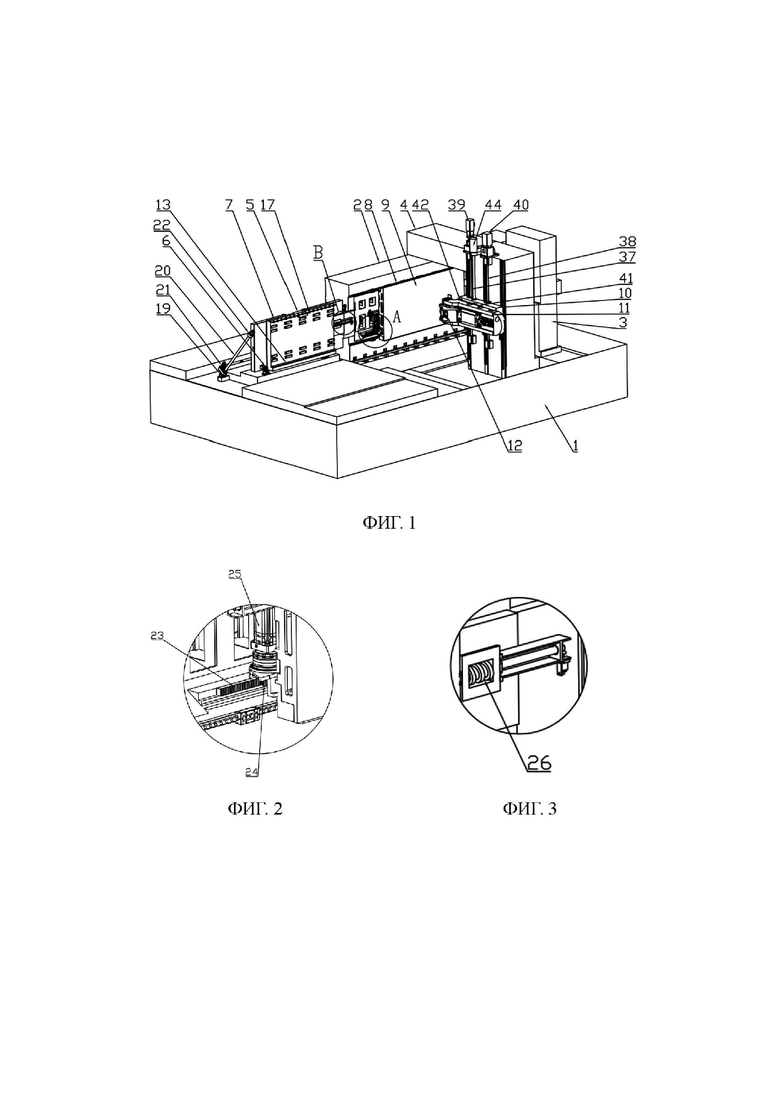
Фигура 1 представляет собой схематическую диаграмму структуры одного из вариантов осуществления настоящего изобретения.
Фигура 2 представляет собой увеличенный масштаб А на фигуре 1.
Фигура 3 представляет собой увеличенный масштаб В на фигуре 1.
Фигура 4 представляет собой схематическую диаграмму трехмерной структуры рабочего стола, описанного в одном из вариантов осуществления настоящего изобретения.
Фигура 5 представляет собой увеличенный масштаб С на фигуре 4.
Фигура 6 представляет собой схематическую диаграмму трехмерной структуры рабочего стола, описанного в варианте осуществления настоящего изобретения, под другим углом.
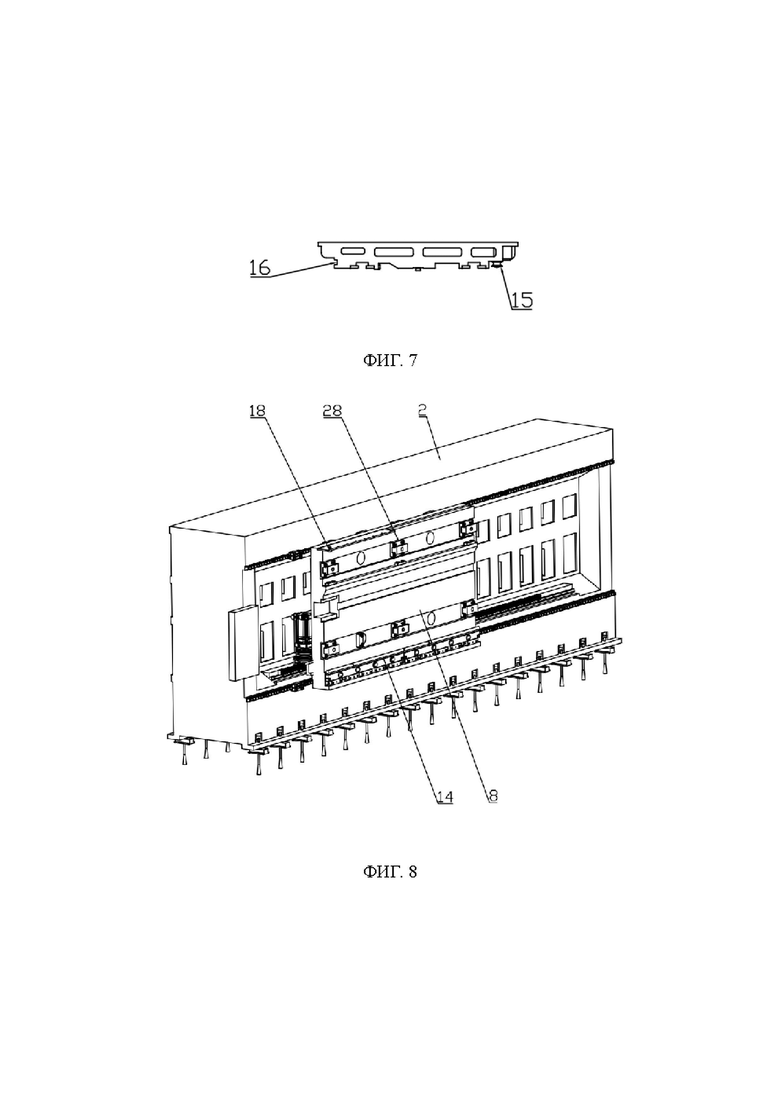
Фигура 7 представляет собой боковой схематический вид рабочего стола, описанного в одном из вариантов осуществления настоящего изобретения.
Фигура 8 представляет собой схематическую диаграмму структуры станка с Х-направленным ползуном, как описано в одном из вариантов осуществления настоящего изобретения.
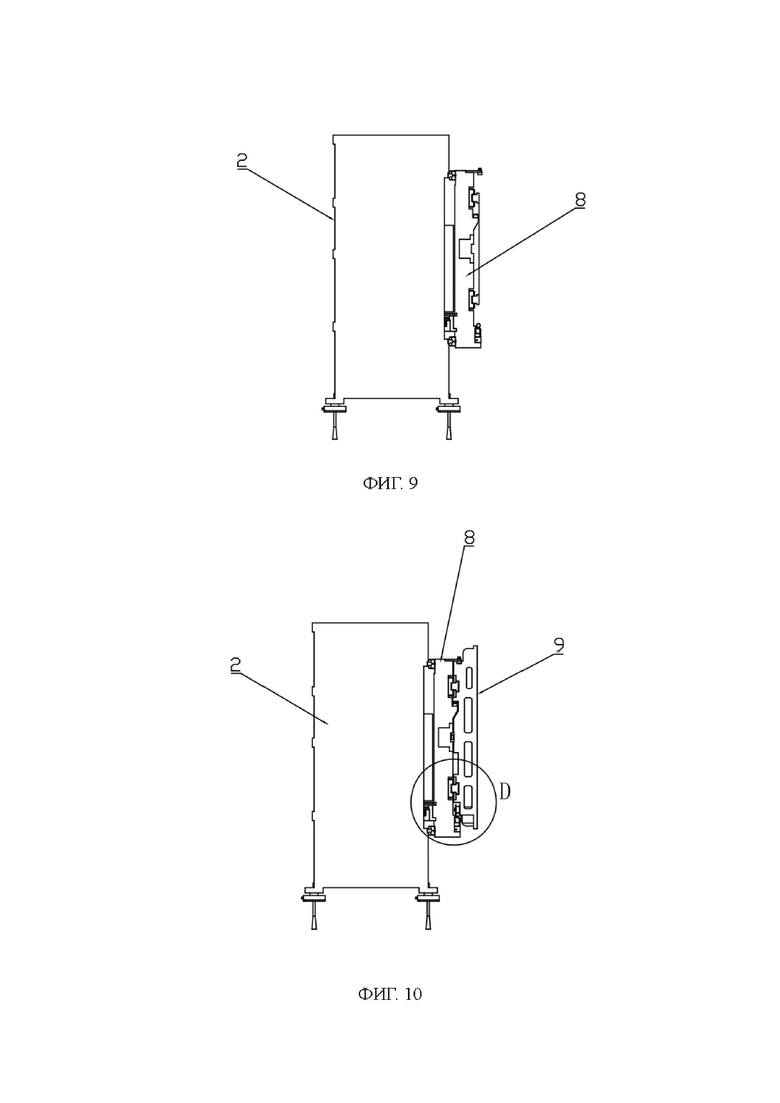
Фигура 9 представляет собой схематический вид сбоку станка с X-направленным ползуном, как описано в одном из вариантов осуществления настоящего изобретения.
Фигура 10 представляет собой схематический вид сбоку станка, X-направленного ползуна с рабочим столом, как описано в одном из вариантов осуществления настоящего изобретения.
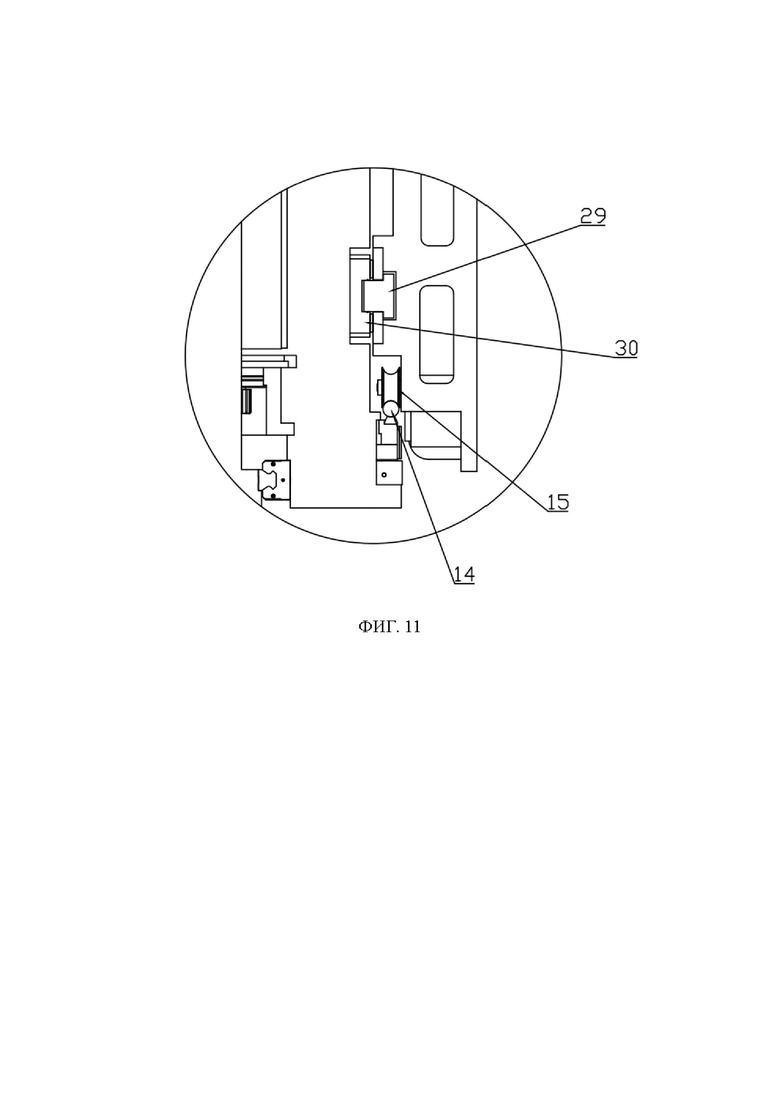
Фигура 11 представляет собой увеличенный масштаб D на фигуре 10.
Подробное описание изобретения
Как показано на фигурах 1-11, горизонтальный пятиосевой обрабатывающий центр с опрокидной полкой, включающий опорное основание 1, станок 2, установленный на опорном основании 1, и колонну 3, установленную на опорном основании 1, причем указанный станок 2 и колонна 3 соединены соединительным рычагом 4, указанное опорное основание 1 также снабжено устройством 5 опрокидной полки, указанное устройство 5 опрокидной полки включает в себя опрокидную полку 7, шарнирно соединенную с опорным основанием 1 первым шарниром 6, и первый приводной блок, способный приводить в движение опрокидную полку 7 первое приводное устройство для опрокидывания, причем указанный станок 2 имеет на стороне, обращенной к колонне 3, Х-направленный ползун 8, способный скользить в Х-направлении по станку 2, и второй приводной блок, способный приводить в движение Х-направленный ползун 8, причем указанная опрокидная полка 7 имеет на опрокидной полке 7 рабочий стол 9, способный приводить в движение рабочий стол для изменения положения между опрокидной полкой 7 и Х-направленным ползуном 8, третий приводной блок, указанный Х-направленный ползун 8 снабжен стопорным механизмом 28, способным фиксировать рабочий стол 9, указанная колонна 3 снабжена Y-направленным ползуном 10, указанный Y-направленный ползун 10 снабжен Z-направленным ползуном 11, указанный Z-направленный ползун 11 снабжен фрезерной головкой 12.
Указанная опрокидная полка 7 снабжена первой опорной направляющей 13 в нижней части, указанный Х-направленный ползун 8 снабжен второй опорной направляющей 14 в нижней части, указанный рабочий стол 9 снабжен скользящими роликами 15 в нижней части спинки, указанные скользящие ролики 15 способны скользить по первой опорной направляющей 13 и второй опорной направляющей 14, указанные первая опорная направляющая 13 и вторая опорная направляющая 14 установлены соосно, указанные верхняя часть рабочего стола 9 снабжена ограничительным желобом 16, указанная верхняя часть опрокидной полки 7 снабжена первым ограничительным роликом 17, указанный первый ограничительный ролик 17 может входить в ограничительный желоб 16 и скользить относительно ограничительного желоба 16 и ограничивать рабочий стол 9 относительно опрокидной полки 7, указанная верхняя часть Х-направленного ползуна 8 снабжена вторым ограничительным роликом 18, указанный второй ограничительный ролик 18 способен входить и скользить относительно ограничительных желобов 16 и ограничивать рабочий стол 9 на X-направленном ползуне 8.
Указанный первый приводной блок включает в себя винт 20 опрокидной полки7, шарнирно соединенный с опорным основанием 1 посредством второго шарнира 19 и приводным двигателем 21 опрокидной полки7, приводящий во вращение винт 20 опрокидной полки7, причем указанная опрокидная полка 7 снабжена винтовой гайкой 22 на верхней торцевой поверхности опрокидной полки 7 в соединении с винтом 20 опрокидной полки7, в данном варианте осуществления, для обеспечения стабильности поворота, каждый из двух верхних концов указанной опрокидной полки 7 снабжен винтовой гайкой, а два конца указанной опрокидной полки 7 снабжены двумя винтами опрокидной полки 7 соответственно.
Второй приводной блок состоит из стойки 23, закрепленной на станке в направлении X, шестерни 24, установленной на Х-направленном ползуне 8, и электродвигателя 25, приводящего в движение шестерню 24, причем шестерня 24 зацепляет стойку 23, как показано на фигуре 2.
Указанный третий приводной блок включает в себя червяк 26 и электродвигатель для привода червяка, конкретный привод может быть соосным или горизонтальным посредством шестерней, осевое направление указанного червяка 26 установлено вдоль направления X, задняя часть указанного рабочего стола 9 снабжена роликами 27, расположенными вдоль направления X, между соседними роликами 27 имеется зазор для взаимодействия с указанным червяком 26, винтообразная структура червяка подходит к роликам 27 с интервалами для формирования аналогичной структуры зацепления, которая позволяет червяку 26 толкать ролики 27 при вращении, тем самым приводя в движение рабочий стол 9.
Как показано на фигуре 11, указанный стопорный механизм 28 включает Т-образный блок 29, опорный блок 30, тягу 31, тарельчатую пружину 32, пружину 33 и четвертый приводной блок для приведения в движение осевого перемещения тяги 31, причем опорный блок 30 закреплен на X-направленном ползуне 8, тяга 31 проходит через Т-образный блок 29 и опорный блок 30, а конец тяги 31 имеет первый радиальный выступ 34, способный тянуть Т-образный блок 29, причем указанная пружина 33 предусмотрена между Т-образным блоком 29 и опорным блоком 30, а тарельчатая пружина 32 установлена на тяге 31, причем тарельчатая пружина 32 и Т-образный блок 29 расположены на внешней и внутренней сторонах опорного блока 30 соответственно, а тяга 31 имеет второй радиальный выступ 35, ограничивающий тарельчатую пружину 32 на тяге 31, причем концы тарельчатой пружины 32 расположены напротив опорного блока 30 и второго радиального выступа 35 соответственно. В разблокированном состоянии четвертый приводной блок толкает тягу 31, второй радиальный выступ 35 сжимает тарельчатую пружину 32, Т-образный блок 29 перемещается в направлении опорного блока 30 под действием пружины 33, создавая определенный зазор между ним и опорным блоком 30, так что когда рабочий стол 9 скользит к Х-направленному ползуну 8, Т-образный блок 29 входит в Т-образный стопорный желоб 43, четвертый приводной блок перестает толкать тягу 31, тарельчатая пружина 32 расширяется и возвращается из сжатого состояния, тянет тягу 31 через второй радиальный выступ 35, тяга 31 тянет Т-образный блок 29 через первый радиальный выступ 34 в направлении опорного блока 30 и фиксирует Т-образный блок 29, и в свою очередь Т-образный блок 29 фиксирует рабочий стол 9 на Х-направленном ползуне 8. Четвертый приводной блок, используемый в данном варианте, может быть масляным цилиндром или кулачковой конструкцией, приводимой в движение шаговым двигателем, если он позволяет толкать тягу 31.
Указанный Y-направленный ползун 10 устанавливается на одной стороне колонны 3, а магазин инструментов 36 устанавливается на другой стороне колонны. В этом варианте осуществления шпиндельная коробка подвешена сбоку на левой боковой поверхности колонны, а магазин инструментов установлен на правой боковой поверхности колонны для смены инструментов с помощью мобильного робота. Сторона указанной колонны 3 имеет первый Y-направленный винт 37, второй Y-направленный винт 38, первый Y-направленный приводной двигатель 39 и второй Y-направленный приводной двигатель 40, приводящий в движение первый Y-направленный винт 37 и второй Y-направленный винт 38 соответственно, указанный Y-направленный ползун 10 установлен на первый Y-направленный винт 37 и второй Y-направленный винт 38, указанный Y-направленный ползун 10 имеет две Z-направленные направляющие 41, указанный Z-направленный ползун 11 установлен с обеих сторон Z-направленной направляющей 41 посредством Z-ползунов 42, указанная фрезерная головка 12 представляет собой маятниковую фрезерную головку, в частности, маятниковую фрезерную головку с тягой. Упомянутая колонна 3 также снабжена балансировочным цилиндром 44 для балансировки Y-направленного ползуна 10. Шпиндель данного варианта осуществления изобретения обеспечивает движение оси А вокруг оси X, весь станок имеет относительно простую конструкцию и очень хорошую жесткость шпинделя, что особенно подходит для эффективной и высокоточной обработки авиационных деталей из алюминиевого сплава и цилиндрических деталей. Он особенно подходит для эффективной и высокоточной обработки деталей из алюминиевых сплавов и цилиндрических деталей.
Х-направление, Y-направление и Z-направление, описанные в настоящем изобретении, являются общепринятыми названиями для направления станка в данной области, для облегчения дифференциации направленной связи между перемещением и настройкой каждого компонента, а не в качестве квалификации абсолютного направления каждого компонента.
Рабочий процесс данного осуществления выглядит следующим образом:
Загрузка: рабочее положение опрокидной полки 7 обращено вверх, рабочий стол 9 расположен на опрокидной полке 7, и рабочий загружает обрабатываемую деталь.
Переворот опрокидной полки: после загрузки заготовки первый приводной блок приводит опрокидную полку 7 во вращение и поднимает ее в вертикальное положение и параллельно Х-направленного ползуна 8 на станке 2.
Рабочий стол станка: червяк 26 третьего приводного блока приводит рабочий стол 9 в положение станка, скользящий ролик 15 перекатывается с первой опорной направляющей 13 на вторую опорную направляющую 14, а стопорный механизм фиксирует рабочий стол 9 на Х-направленном ползуне 8 для обработки детали.
Снятие обработанных деталей со станка: после завершения обработки рабочий стол 9 возвращается на опрокидную полку 7, приводимый в движение третьим приводным блоком, а первый приводной блок приводит опрокидную полку 7 во вращение в горизонтальное положение, где рабочий выполняет снятие детали, после чего переходит к следующему циклу.
Описанные выше варианты осуществления являются лишь описанием предпочтительного варианта осуществления настоящего изобретения и не предназначены для ограничения объема настоящего изобретения. Не отступая от сущности настоящего изобретения, всевозможные вариации и усовершенствования, внесенные в технические решения настоящего изобретения специалистами в данной области техники, подпадают под объем охраны, определяемый формулой настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХПОЗИЦИОННАЯ КОМБИНИРОВАННАЯ ПОРТАЛЬНАЯ СИСТЕМА ОБРАБОТКИ, СПОСОБНАЯ АВТОМАТИЧЕСКИ ПЕРЕВОРАЧИВАТЬ И ОБРАБАТЫВАТЬ ЗАГОТОВКИ | 2020 |
|
RU2836246C2 |
| ПЯТИОСЕВАЯ ВЕРТИКАЛЬНАЯ ОБРАБАТЫВАЮЩАЯ СИСТЕМА С АВТОМАТИЧЕСКОЙ ЗАГРУЗКОЙ И ВЫГРУЗКОЙ | 2020 |
|
RU2836770C2 |
| Станок для обработки ферромагнитных сердечников | 1981 |
|
SU1109075A3 |
| Многопозиционный станок | 1987 |
|
SU1454652A1 |
| УСТРОЙСТВО ДЛЯ ЗАЖИМА В ЦЕНТРАЛЬНОМ ПОЛОЖЕНИИ ОБРАБАТЫВАЕМОЙ ДЕТАЛИ И СТАНОК, СОДЕРЖАЩИЙ ТАКОЕ УСТРОЙСТВО | 2004 |
|
RU2341382C2 |
| НИЗКОУРОВНЕВЫЙ ТОКАРНЫЙ СТАНОК ПОДВИЖНОГО БАЗИРОВАНИЯ ДЛЯ ВОССТАНОВЛЕНИЯ КОЛЕСНОЙ ПАРЫ | 2021 |
|
RU2759101C1 |
| 3D-ПРИНТЕР | 2019 |
|
RU2698353C1 |
| Устройство для загрузки изделий в тару | 1990 |
|
SU1724519A1 |
| Линия изготовления комбинированных балок | 1988 |
|
SU1558676A1 |
| Кантователь металлоконструкций под сварку | 1988 |
|
SU1532260A1 |

Изобретение относится к области машиностроения. Горизонтальный пятиосевой обрабатывающий центр с опрокидной полкой включает опорное основание, станок и колонну. Станок и колонна неподвижно соединены соединительным рычагом. Опорное основание снабжено устройством опрокидной полки, которое включает опрокидную полку, шарнирно закрепленную на опорном основании в нижней части, и первый приводной блок, выполненный с возможностью приведения опрокидной полки в движение в опрокинутом состоянии. Станок имеет на стороне, обращенной к колонне, X-направленный ползун, выполненный с возможностью скольжения в направлении X по станку, и второй приводной блок, выполненный с возможностью приведения в движение Х-направленного ползуна. Опрокидная полка снабжена третьим приводным блоком, выполненным с возможностью приведения в движение рабочего стола для изменения положения между опрокидной полкой и Х-направленным ползуном. Х-направленный ползун снабжен стопорным механизмом, выполненным с возможностью фиксации рабочего стола. Колонна снабжена Y-направленным ползуном с Z-направленным ползуном, имеющим фрезерную головку. Техническим результатом изобретения является повышение эффективности загрузки и разгрузки станка для обработки заготовок. 6 з.п. ф-лы, 11 ил.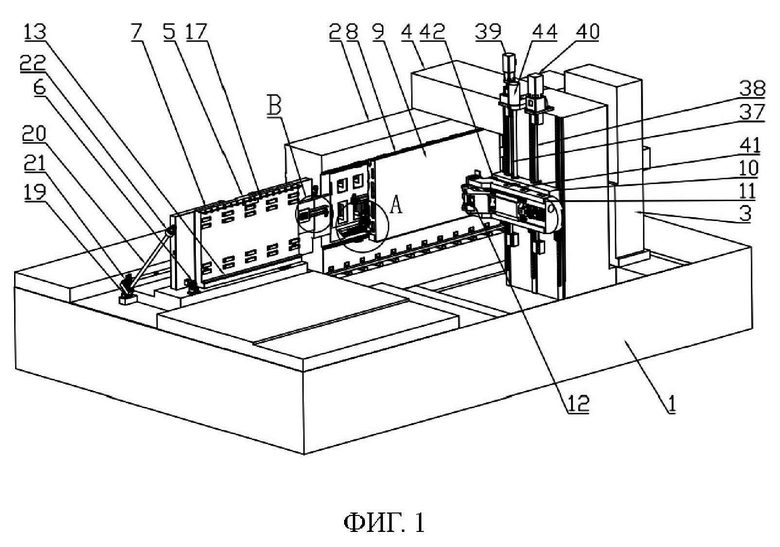
1. Горизонтальный пятиосевой обрабатывающий центр с опрокидной полкой, включающий опорное основание (1), станок (2), установленный на опорном основании (1), и колонну (3), установленную на опорном основании (1), при этом станок (2) и колонна (3) неподвижно соединены соединительным рычагом (4), отличающийся тем, что опорное основание (1) снабжено устройством (5) опрокидной полки, которое включает опрокидную полку (7), шарнирно закрепленную на опорном основании (1) в нижней части, и первый приводной блок, выполненный с возможностью приведения опрокидной полки (7) в движение в опрокинутом состоянии, при этом станок (2) имеет на стороне, обращенной к колонне (3), X-направленный ползун (8), выполненный с возможностью скольжения в направлении X по станку (2), и второй приводной блок, выполненный с возможностью приведения в движение Х-направленного ползуна (8), опрокидная полка (7) снабжена третьим приводным блоком, выполненным с возможностью приведения в движение рабочего стола (9) для изменения положения между опрокидной полкой (7) и Х-направленным ползуном (8), при этом Х-направленный ползун (8) снабжен стопорным механизмом (28), выполненным с возможностью фиксации рабочего стола (9), а колонна (3) снабжена Y-направленным ползуном (10) с Z-направленным ползуном (11), имеющим фрезерную головку (12).
2. Обрабатывающий центр по п. 1, отличающийся тем, что опрокидная полка (7) снабжена первой опорной направляющей (13) в нижней части, Х-направленный ползун (8) снабжен второй опорной направляющей (14) в нижней части, нижняя задняя часть рабочего стола (9) снабжена скользящими роликами (15), выполненными с возможностью скольжения по первой опорной направляющей (13) и второй опорной направляющей (14), верхняя часть рабочего стола (9) снабжена ограничительным желобом (16), при этом верхняя часть опрокидной полки (7) снабжена первым ограничительным роликом (17), который выполнен с возможностью вхождения в ограничительный желоб (16) и скольжения относительно указанного желоба (16), а также ограничения рабочего стола (9) относительно опрокидной полки (7), верхняя часть Х-направленного ползуна (8) снабжена вторым ограничительным роликом (18), который выполнен с возможностью вхождения и скольжения по ограничительному желобу (16), а также ограничения рабочего стола (9) на Х-направленном ползуне (8).
3. Обрабатывающий центр по п. 2, отличающийся тем, что первый приводной блок включает винт (20) опрокидной полки (7), шарнирно соединенный с опорным основанием (1) и приводным двигателем (21) опрокидной полки (7), приводящим во вращение винт (20) опрокидной полки (7), при этом опрокидная полка (7) снабжена винтовой гайкой (22) на верхней части торцевой поверхности опрокидной полки (7), которая подходит к винту (20) опрокидной полки (7).
4. Обрабатывающий центр по п. 3, отличающийся тем, что второй приводной блок включает в себя стойку (23), закрепленную на станке (2) в направлении X, шестерню (24), установленную на Х-направленном ползуне (8) в направлении X, и электродвигатель (25), приводящий в движение шестерню (24), при этом шестерня (24) входит в зацепление со стойкой (23).
5. Обрабатывающий центр по п. 4, отличающийся тем, что третий приводной блок включает червяк (26) и двигатель для привода червяка (26), при этом червяк (26) установлен вдоль направления X, а задняя часть рабочего стола (9) снабжена роликами (27), расположенными вдоль направления X, с зазорами между соседними роликами (27) для взаимодействия с червяком (26) с обеспечением возможности толкания роликов (27) червяком (26) при его вращении с приведением в движение рабочего стола (9).
6. Обрабатывающий центр по п. 5, отличающийся тем, что стопорный механизм (28) включает Т-образный блок (29), опорный блок (30), тягу (31), тарельчатую пружину (32), пружину (33) и четвертый приводной блок для обеспечения осевого перемещения тяги (31), при этом опорный блок (30) закреплен на Х-направленном ползуне (8), тяга (31) проходит через Т-образный блок (29) и опорный блок (30), а конец тяги (31) имеет первый радиальный выступ (34), способный тянуть Т-образный блок (29), пружина (33) установлена между Т-образным блоком (29) и опорным блоком (30), а тарельчатая пружина (32) установлена на тяге (31), тарельчатая пружина (32) и Т-образной блок (29) расположены на внешней и внутренней сторонах опорного блока (30) соответственно, а тяга (31) имеет второй радиальный выступ (35), выполненный с возможностью ограничения тарельчатой пружины (32) на тяге (31), концы тарельчатой пружины (32) соответственно находятся в контакте с опорным блоком (30) и вторым радиальным выступом (35), а задняя часть рабочего стола (9) имеет Т-образный стопорный желоб (43) для установки в Т-образный блок (29).
7. Обрабатывающий центр по любому из пп. 1-6, отличающийся тем, что Y-направленный ползун (10) расположен на одной из сторон колонны (3), а магазин инструментов (36) установлен на другой стороне колонны (3), при этом на стороне колонны (3), на которой расположен Y-направленный ползун (10), выполнены первый Y-направленный винт (37), второй Y-направленный винт (38) и первый Y-направленный приводной двигатель (39), а также второй Y-направленный приводной двигатель (40), выполненный с возможностью приведения в движение первого Y-направленного винта (37) и второго Y-направленного винта (38) соответственно, Y-направленный ползун (10) установлен на первом Y-направленном винте (37) и втором Y-направленном винте (38), Y-направленный ползун (10) снабжен двумя Z-направленными направляющими (41), обе стороны Z-направленного ползуна (11) установлены на Z-направленных направляющих (41) посредством Z-ползунов (42), при этом фрезерная головка (12) представляет собой фрезерную головку, выполненную с возможностью качания.
| CN 110039095 A, 23.07.2019 | |||
| CN 109262031 A, 25.01.2019 | |||
| CN 204295296 U, 29.04.2015 | |||
| CN 109262032 A, 25.01.2019 | |||
| US 2006260907 A1, 23.11.2006. |

