Предлагаемая механическая передача движения на вал штатной трубопроводной арматуры (далее передача) является частью одностороннего, пространственного привода устройства с ручным взводом и может преимущественно быть использована в системах аварийной защиты для приведения в закрытое или открытое положение штатной запорной трубопроводной арматуры.
Известные (RU 89135, МПК Е03С 1/05 (2006.01), 27.11.2009, RU 91579, МПК Е03С 1/05, Е03С 1/242 (2006.01), 20.02.2010 и RU 91580, МПК Е03С 1/05, Е03С 1/242 (2006.01), 20.02.2010) устройства аварийного отключения подачи воды содержат установленный в кране (стойке) вал с закрепленной на нем рукояткой. Периферия рукоятки соединена с гибким передаточным элементом механизма, частично размещенным с возможностью движения в трубе для гибкого передаточного элемента механизма, вдоль ее центровой линии. Ближний к рукоятке конец трубы для гибкого передаточного элемента механизма закреплен в ориентирующем ее элементе, закрепленном на смежной крану трубе трубопровода (стойке).
Недостатком указанных устройств является сложность создания в них универсального крепления элемента, ориентирующего трубу для гибкого передаточного элемента механизма, а также отсутствие возможности удобной ориентации самого ориентирующего элемента, т.к. смежная крану труба действующего трубопровода может быть по-разному ориентирована относительно крана, а окружающее пространство ограничено.
Указанные недостатки отсутствуют в прототипе RU 2554413, МПК Е03С 1/05 (2006.01), Е03С 1/242 (2006.01), F16P 5/00 (2006.01), F16L 29/00 (2006.01), F17D 5/02 (2006.01), 27.06.15. Там на рукоятке с возможностью вращательного или винтового движения, соосного оси вращения вала, смонтировано звено, содержащее названный ориентирующий элемент, а между звеном и стойкой установлена механическая связь, препятствующая вращению звена вокруг оси вращения вала по крайней мере в одном направлении.
Недостатком прототипа является отсутствие возможности изменения плеча силы в нужной фазе передачи им движения на вал крана, что обусловлено соосностью вращательного или винтового движения звена оси вращения вала. Например, при выводе из длительного покоя запорного элемента шарового крана требуется больший момент силы, чем в остальных фазах или через минуту.
Техническим результатом заявленного изобретения является создание более надежного устройства за счет передачи на вал штатного крана движение с измененным в нужной фазе плечом силы. Это позволяет, например, увеличить в начальной фазе движения момент силы, передаваемый устройством на вал длительно покоившегося, «вросшего» в сопряженные детали, запорного элемента шарового крана, или компенсировать снижение силы упругого двигателя в конце хода увеличением ее плеча без увеличения габаритов деталей.
Для этого известная передача содержит установленный в стойке вал с закрепленной на нем рукояткой. Периферия рукоятки соединена с гибким передаточным элементом механизма, частично размещенным с возможностью движения в трубе для гибкого передаточного элемента механизма. Ближний к рукоятке конец трубы для гибкого передаточного элемента механизма закреплен в ориентирующем элементе, закрепленном на звене, смонтированном на рукоятке с возможностью вращательного или винтового движения. Между звеном и стойкой установлена механическая связь, препятствующая вращению звена вокруг оси вращения вала по крайней мере в одном направлении и выполненная или посредством, по крайней мере одного, самого удобного из множества, элемента сопряжения механической связи звена со стойкой, сопряженного с твердым или гибким телом, связанным со стойкой, или посредством упора звена в стойку. Ось вращательного или винтового движения звена смещена относительно оси вращения вала.
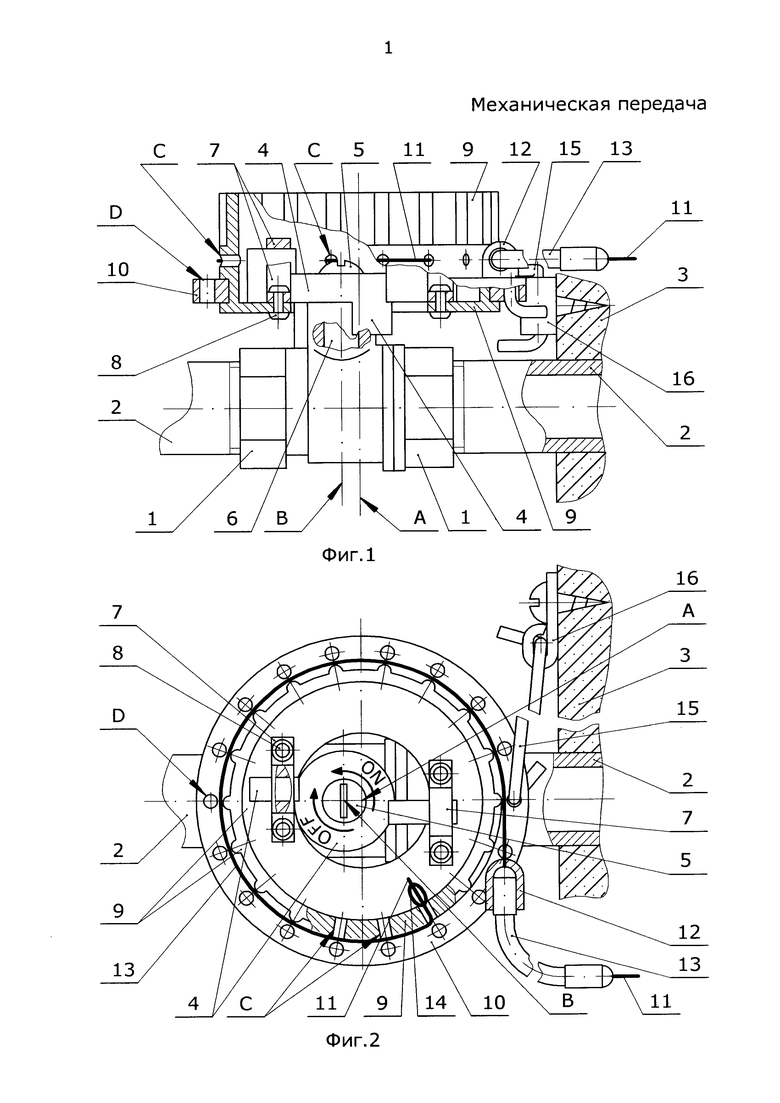
На фиг. 1 представлен вид спереди передачи, в которой ось А вращательного движения звена 10 относительно рукоятки 9 смещена относительно оси В вращения вала 6 крана 1 в сторону увеличения плеча силы гибкого передаточного элемента 11 в начальной фазе смещения запорного элемента крана 1 в закрытое положение. При этом элемент D сопряжения механической связи звена 10 со стойкой сопряжен с твердым телом 15 этой связи, связанным со стойкой (стеной 3) посредством проушины 16.
На фиг. 2 представлен вид сверху передачи по фиг. 1. Если цепь D-15-16 установить симметрично относительно плоскости, в которой расположены ось трубопровода 2 и ось В вращения вала 6 крана 1, то симметричное твердому телу 15 механической связи звена 10 со стойкой тело может быть не только твердым, но и гибким.
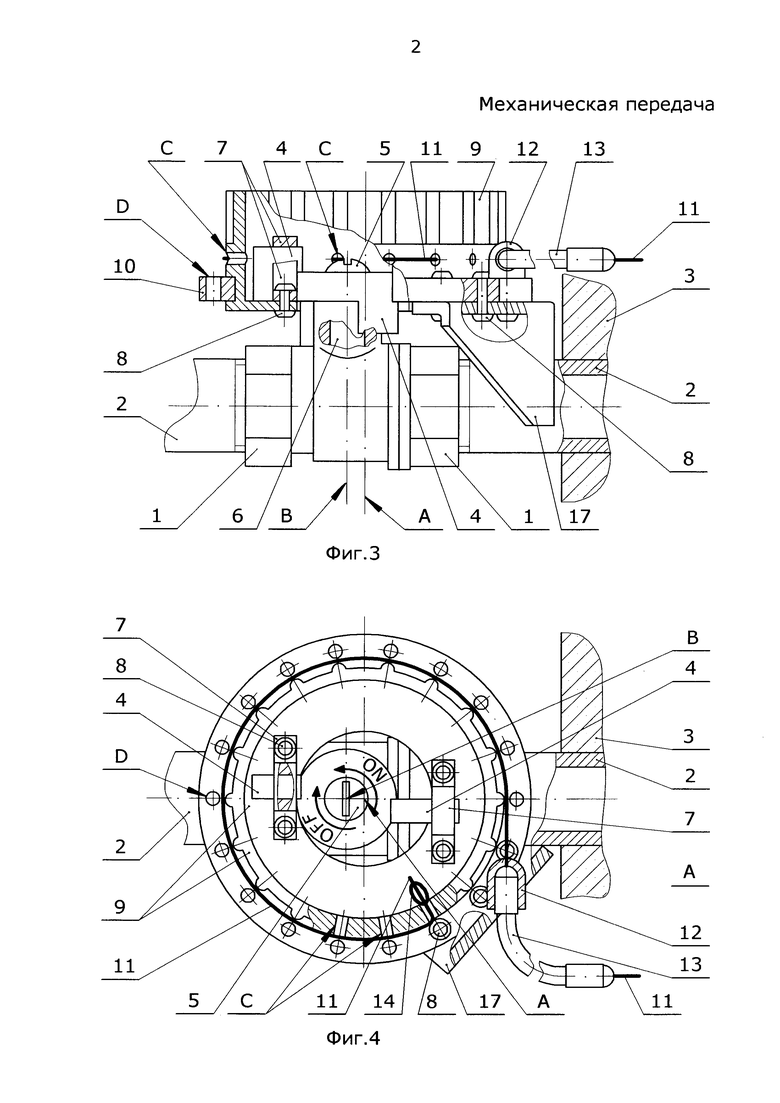
На фиг. 3 представлен вид спереди передачи, в которой ось А вращательного движения звена 10 относительно рукоятки 9 смещена относительно оси В вращения вала 6 крана 1 в сторону увеличения плеча силы гибкого передаточного элемента 13 в начальной фазе смещения запорного элемента крана 1 в закрытое положение. При этом механическая связь звена 10 со стойкой осуществлена посредством упора в трубопровод 2 (стойку) кронштейна 17, закрепленного на звене 10 в удобном положении с помощью заклепок 8 и выбранных из множества элементов D сопряжения механической связи звена 10.
На фиг. 4 представлен вид сверху передачи по фиг. 3.
Наименование позиций и обозначений на фигурах.
1. Кран штатный (стойка).
2. Трубопровод действующий (стойка).
3. Стена, на которой закреплены действующий трубопровод 2 со штатным краном 1 и проушина 16 (стойка).
4. Рукоятка штатная крана 1.
5. Винт крепления штатной рукоятки 4 к валу 6 крана 1.
6. Вал штатного крана 1.
7. Хомут крепления универсальной рукоятки 9 к штатной рукоятке 4 посредством заклепок 8.
8. Заклепка.
9. Рукоятка универсальная.
10. Звено, смонтированное на универсальной рукоятке 9 с возможностью вращательного движения вокруг неподвижной относительно универсальной рукоятки 9 оси А, параллельной оси В вращения вала 6 штатного крана 1.
11. Гибкий передаточный элемент механизма - в частности, это может быть трос.
12. Элемент, ориентирующий и удерживающий ближний к универсальной рукоятке 9 конец трубы 13 для гибкого передаточного элемента 11 механизма таким образом, чтобы центровая линия конца трубы 13 для гибкого передаточного элемента 11 механизма совпадала с касательной к траектории вращательного движения периферии универсальной рукоятки 9 вокруг оси А. Элемент 12 заранее закреплен на звене 10.
13. Труба для гибкого передаточного элемента 11 механизма, в которой частично, с возможностью движения вдоль ее центровой линии, размещен гибкий передаточный элемент 11 механизма. К трубе относят гибкий шланг, включая гибкий металлический.
14. Зажим гибкого передаточного элемента 11 механизма.
15. Твердое тело механической связи звена 10 со стойкой (проушиной 16).
16. Проушина (стойка).
17. Кронштейн звена 10. Имеет г-образную форму с соосными элементам D сквозными отверстиями в верхней полке, предназначенными для объединения его со звеном 10 посредством заклепок. Осуществляет механическую связь звена 10 со стойкой посредством упора в трубопровод 2 (стойку).
А - ось вращательного движения звена 10. Неподвижна относительно универсальной рукоятки 9. Параллельна оси В вращения вала 6.
В - ось вращения вала 6 штатного крана 1.
С - отверстие сквозное в теле универсальной рукоятки 9. Предназначено для закрепления гибкого передаточного элемента 11 механизма на ее периферии. Для удобства монтажа устройства выполнено множество отверстий С.
D - элемент сопряжения механической связи звена 10 со стойкой. Является совокупностью поверхностей, линий и отдельных точек звена 10, по которым оно соприкасается с другим элементом сопряжения указанной связи. Образован на теле звена 10 сквозным отверстием. Для удобства монтажа устройства выполнено множество элементов D.
Предлагаемая передача (фиг. 1-4) сформирована на основе нормально открытого для движения воды штатного крана 1 действующего трубопровода 2, закрепленного на стене 3. К штатной рукоятке 4, закрепленной винтом 5 на валу 6 штатного крана 1, посредством хомутов 7 и заклепок 8 присоединена универсальная рукоятка 9 таким образом, чтобы неподвижная относительно универсальной рукоятки 9 ось А, допустимого вращательного движения звена 10, как можно точнее совпала с прямой, параллельной оси В вращения вала 6 крана 1, и была смещена относительно оси В в сторону увеличения плеча силы гибкого передаточного элемента 11 относительно оси В в начальной фазе смещения запорного элемента крана 1 в закрытое положение, то есть по линии, соединяющей первую точку касания троса 11 с рукояткой 9 и осью В. (При неприемлемых трудностях объединения рукояток 4 и 9 на вал 6 тем же винтом 5 закрепляется единая рукоятка, совмещающая свойства объединяемых.) Звено 10 содержит элемент 12, ориентирующий и удерживающий ближний к универсальной рукоятке 9 конец трубы 13 для гибкого передаточного элемента 11 механизма, в которой с возможностью движения вдоль ее центровой линии, частично размещен гибкий передаточный элемент 11 механизма, например трос. Элемент 12 ориентирует конец трубы 13 таким образом, чтобы центровые линии конца этой трубы и троса 11 совпадали с касательной к траектории вращательного движения вокруг осей А и В периферии универсальной рукоятки 9, на которой намотан трос 11. Один конец троса 11 закреплен на рукоятке 9 посредством одного, самого удобного из множества, сквозного отверстия С и зажима 14, другой - на двигателе привода.
Для закрепления на стойке сориентированного звена 10 и, соответственно, трубы 13 звено 10 содержит множество элементов D сопряжения механической связи звена 10 со стойкой. Самый удобно расположенный из них сопряжен (фиг. 1 и 2) с твердым телом 15 механической связи звена 10 со стойкой, которое, в свою очередь, связано со стойкой посредством проушины 16, закрепленной на стене 3 (стойке). Если цепь D-15-16 установить симметрично относительно плоскости, в которой расположены ось трубопровода 2 и ось В вращения вала 6 штатного крана 1, то симметричное твердому телу 15 механической связи тело может быть не только твердым, но и гибким. И, наконец, самой компактной, не требующей привязки к стене 3, является передача, представленная на фиг. 3 и 4. Там сопряжение звена 10 со стойкой осуществлено посредством упора в трубопровод 2 (стойку) кронштейна 17, закрепленного на звене 10 в удобном положении с помощью заклепок 8 и выбранных из множества элементов D сопряжения механической связи звена 10 со стойкой. Существуют и другие варианты механической связи сориентированного звена 10 со стойкой посредством его элементов D.
Нормально открытый кран 1 с установленной на нем предлагаемой передачей позволяет содержимому трубопровода двигаться к потребителю с максимальной или с заранее установленной универсальной рукояткой 9 скоростью. Причем при обычном пользовании краном в ранее установленных пределах трос 11 не препятствует вращению рукой универсальной рукоятки 9 вокруг оси В вращения вала 6 крана 1, а либо упруго изгибается при этом, либо затягивается в трубу 13 силой специальной пружины привода.
При появлении аварийного сигнала в системе управления приводом крана 1 двигатель привода смещает трос 11 вдоль центровой линии трубы 13. Закрепленный посредством отверстия С и зажима 14 на периферии универсальной рукоятки 9 и направленный с помощью ориентирующего элемента 12 по касательной к траектории вращательного движения периферии универсальной рукоятки 9 вокруг параллельных осей А и В, трос 13 передает на рукоятку 9 вращающую ее силу. Увеличенный за счет смещения друг от друга осей А и В по линии, соединяющей первую точку касания троса 11 с рукояткой 9 и осью В, момент силы преодолевает повышенное начальное сопротивление длительно покоящегося запорного элемента крана 1 и поворачивает рукоятку 9 в закрытое для движения содержимого трубопровода положение. При этом цепь D-15-16 или кронштейн 17 препятствуют соответствующему повороту звена 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЧЕСКАЯ ПЕРЕДАЧА ДВИЖЕНИЯ НА ВАЛ ШТАТНОЙ ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2015 |
|
RU2616384C1 |
| МЕХАНИЧЕСКАЯ ПЕРЕДАЧА ДВИЖЕНИЯ НА ВАЛ ШТАТНОЙ ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2014 |
|
RU2554413C1 |
| ОГРАНИЧИТЕЛЬ СКОРОСТИ ДВИЖЕНИЯ ТЕЛА | 2015 |
|
RU2623612C2 |
| ОГРАНИЧИТЕЛЬ СКОРОСТИ ДВИЖЕНИЯ ТЕЛА | 2017 |
|
RU2666698C1 |
| ОГРАНИЧИТЕЛЬ СКОРОСТИ ДВИЖЕНИЯ ТЕЛА | 2017 |
|
RU2675642C1 |
| Устройство аварийного отключения подачи воды | 2023 |
|
RU2829150C1 |
| УСТРОЙСТВО АВАРИЙНОГО ОТКЛЮЧЕНИЯ ПОДАЧИ ВОДЫ | 2011 |
|
RU2475600C2 |
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |
| Устройство для укладки проводов и кабелей в трубы | 1979 |
|
SU1092636A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПНЕВМОЦИЛИНДРАМИ РАЗГРУЗКИ ДУМПКАРА (ВОЗДУХОЗАМЕДЛИТЕЛЬ) | 2010 |
|
RU2410261C1 |
Передача предназначена для смещения запорного элемента в крайнее положение и может быть использована в системах аварийной защиты. На рукоятке вала с возможностью вращательного или винтового движения смонтировано звено с ориентирующим и удерживающим трубу для троса элементом. В трубе для троса частично, с возможностью движения для поворота рукоятки и вала размещен трос. Один конец троса закреплен в удобном месте периферии рукоятки, другой - на двигателе привода. Указанное звено установлено в самом удобном положении. Удобное положение указанного звена зафиксировано механической связью, установленной между указанным звеном и стеной. Механическая связь препятствует вращению указанного звена вокруг оси вращения вала по крайней мере в одном направлении. Передача позволяет увеличить момент страгивания, допускает обычное пользование рукояткой, имеет универсальное крепление ориентирующего и удерживающего трубу для троса элемента и удобно монтируется. 4 ил.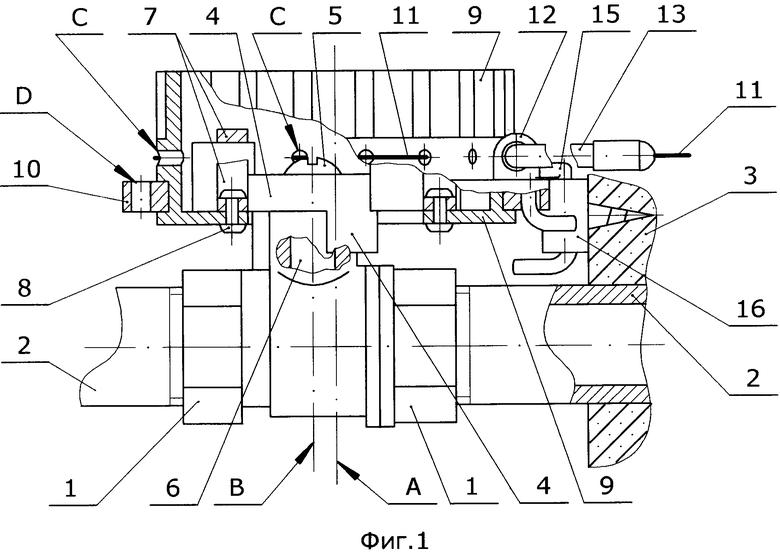
Механическая передача движения на вал штатной трубопроводной арматуры, содержащая установленный в стойке вал с закрепленной на нем рукояткой, периферия которой соединена с гибким передаточным элементом механизма, частично размещенным с возможностью движения в трубе для гибкого передаточного элемента механизма, ближний к рукоятке конец которой закреплен в ориентирующем элементе, закрепленном на звене, смонтированном на рукоятке с возможностью вращательного или винтового движения, а между звеном и стойкой установлена механическая связь, препятствующая вращению звена вокруг оси вращения вала по крайней мере в одном направлении, отличающаяся тем, что ось вращательного или винтового движения названного звена смещена относительно оси вращения вала.
| МЕХАНИЧЕСКАЯ ПЕРЕДАЧА ДВИЖЕНИЯ НА ВАЛ ШТАТНОЙ ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2014 |
|
RU2554413C1 |
| ОБРАТНЫЙ ПОВОРОТНЫЙ ЗАТВОР | 2007 |
|
RU2335682C1 |
| УСТРОЙСТВО АВАРИЙНОГО ОТКЛЮЧЕНИЯ ПОДАЧИ ВОДЫ | 2011 |
|
RU2475600C2 |
| US 20030201011 A1, 30.10.2003 . | |||

