Предлагаемый ограничитель скорости движения рабочего поршня является частью чисто механического управляющего устройства, односторонне воздействующего на объект управления. Преимущественно ограничитель может быть использован в автономных системах аварийной защиты, автоматически приводящих в закрытое или открытое положение штатную трубопроводную арматуру.
Известен ограничитель скорости движения рабочего поршня домкрата SU 1359251, В66F 3/00, 15.12.87, Бюл. №46. Там ограничитель содержит рабочую камеру, объем которой зависит от положения рабочего поршня. Между рабочей камерой и ее единственным выходным отверстием установлен «механизм подачи рабочего тела», содержащий звено, управляющее процессом выхода содержимого рабочей камеры. Ось управляющего звена перпендикулярна оси рабочей камеры. Рабочая камера и окружающее управляющее звено пространство заполнены сыпучим телом. При неподвижном управляющем звене геометрические параметры устройства не меняются со временем, обеспечивая стабильность работы устройства в ждущем режиме. Кроме этого, неподвижное управляющее звено и его сыпучее тело являются стопором устройства, а сыпучее тело рабочей камеры - звеном цепи со стопором, фиксирующей рабочий поршень в ждущем режиме. Принудительное движение управляющего звена приводит к утрате стопором стопорной функции и переходу ограничителя из ждущего режима работы в рабочий. При этом положение оси рабочей камеры не зависит от режима работы ограничителя и неизменно, как и направление (от рабочего поршня) проекции силы тяжести сыпучего тела на ось рабочей камеры.
Недостатком аналога SU 1359251 является необходимость привлечения внешнего источника энергии для вывода его из ждущего режима (принудительного удаления сыпучего тела из рабочей камеры) путем приведения в движение управляющего звена и его сыпучего тела, то есть для утраты стопором стопорной функции. При этом сыпучее тело перемещается в открытую емкость, а не в изолированную от окружающей среды камеру сброса сыпучего тела, что также является недостатком этого аналога, устраненным в «механизме фиксации груза», являющимся дополнительной частью гидравлического домкрата с одним поршнем (SU 523862, В66F 3/24, 05.08.76, Бюл. №29).
Аналог содержит «кольцевую полость», то есть рабочую камеру, объем которой зависит от положения «фиксирующего кольца», выполняющего функцию рабочего поршня и, соответственно, возможность возвратно-поступательного движения вдоль ее оси. Рабочая камера сообщается с камерой сброса сыпучего тела («гильзой») посредством дроссельного «отверстия», площадь проходного сечения которого меньше площади поперечного сечения рабочей камеры. Объем камеры сброса сыпучего тела зависит от положения ее поршня («толкателя»), имеющего возможность возвратно-поступательного движения вдоль ее оси и взаимодействующего с «винтом», «гайка» которого выполнена в корпусе камеры сброса сыпучего тела. Обе камеры заполнены сыпучим телом, а их оси перпендикулярны. При этом неподвижный «винт» является стопором устройства, поршень камеры сброса сыпучего тела и сыпучее тело являются звеньями цепи со стопором, фиксирующей рабочий поршень в ждущем режиме. Принудительное движение «винта» приводит к утрате стопором стопорной функции и переходу ограничителя из ждущего режима работы в рабочий. При этом положение оси рабочей камеры не зависит от режима работы ограничителя и неизменно, как и направление (от рабочего поршня) проекции силы тяжести сыпучего тела на ось рабочей камеры.
Недостатком аналога SU 523862 является необходимость привлечения внешнего источника энергии для вывода его из ждущего режима (то есть для утраты стопором стопорной функции). Это осуществляется приведением в движение «винта» и «гильзы», принудительно удаляющих сыпучее тело из рабочей камеры («Для полного освобождения домкрата от груза производят качкообразное поворачивание домкрата вокруг вертикальной оси, воздействуя на гильзу 10 как на рычаг»).
Указанный недостаток отсутствует в ограничителе скорости движения тела RU 2623612, МПК F15B 20/00 (2006.01), 28.06.2017, Бюл. №19, выбранного в качестве прототипа предлагаемого устройства.
Там ограничитель скорости движения рабочего поршня системы аварийной защиты, автоматически приводящей в закрытое или открытое положение трубопроводную арматуру, содержит рабочую камеру, объем которой зависит от положения рабочего поршня. Рабочая камера сообщается посредством дроссельного отверстия с камерой сброса сыпучего тела. Площадь проходного сечения дроссельного отверстия меньше площади поперечного сечения рабочей камеры. В ждущем режиме рабочая камера заполнена сыпучим телом, являющимся звеном цепи со стопором, блокирующей рабочий поршень в ждущем режиме, а стопор выполнен из разрушающегося при аварии материала. Этим обеспечивается утрата стопором стопорной функции и переход ограничителя в нужный момент из ждущего режима работы в рабочий. При этом положение оси рабочей камеры не зависит от режима работы ограничителя и неизменно, как и направление (от рабочего поршня) проекции силы тяжести сыпучего тела на ось рабочей камеры.
Недостатком прототипа является наличие в нем механической связи стопора с рабочим поршнем, увеличивающей его габарит на величину хода блокирующего поршня камеры сброса сыпучего тела, а также усложняющей изготовление и эксплуатацию устройства.
Техническим результатом заявленного изобретения является упрощение изготовления и эксплуатации устройства, а также уменьшения его габарита за счет исключения из него механической связи стопора с рабочим поршнем.
Предлагаемый ограничитель скорости движения рабочего поршня, содержит рабочую камеру, объем которой зависит от положения рабочего поршня, имеющего возможность возвратно-поступательного движения вдоль ее оси. Рабочая камера сообщается посредством дроссельного отверстия с камерой сброса сыпучего тела. Площадь проходного сечения дроссельного отверстия меньше площади поперечного сечения рабочей камеры. В ждущем режиме рабочая камера заполнена сыпучим телом, а элементы ограничителя расположены и зафиксированы цепью со стопором в положении, при котором проекция силы тяжести сыпучего тела на ось рабочей камеры направлена на рабочий поршень. Поэтому частицы сыпучего тела не имеют возможности высыпаться из рабочей камеры и при достаточной величине суммы проекции силы его тяжести на ось рабочей камеры, силы внутреннего трения и силы трения о внутренние поверхности рабочей камеры блокируют рабочий поршень, всегда находящегося под действием рабочей силы содержащего ограничитель устройства. В противном случае, камера сброса сыпучего тела содержит некоторое количество дополнительного сыпучего тела или груз в виде поршня, или то и другое вместе, помогающих проекциями сил их тяжести на ось рабочей камеры сыпучему телу рабочей камеры заблокировать рабочий поршень. При утрате стопором стопорной функции, элементы ограничителя имеют возможность перемещения таким образом, что в результате проекция силы тяжести сыпучего тела на ось рабочей камеры направлена от рабочего поршня. Тоже происходит и с проекциями сил тяжести на ось рабочей камеры дополнительного сыпучего тела и поршня камеры сброса сыпучего тела, если они имеют место быть. Теперь частицы сыпучего тела имеют возможность высыпаться и выталкиваться из рабочей камеры разблокированным рабочим поршнем посредством действующей на него рабочей силы устройства, содержащего ограничитель. Таким образом, обеспечивается его переход из ждущего режима в рабочий.
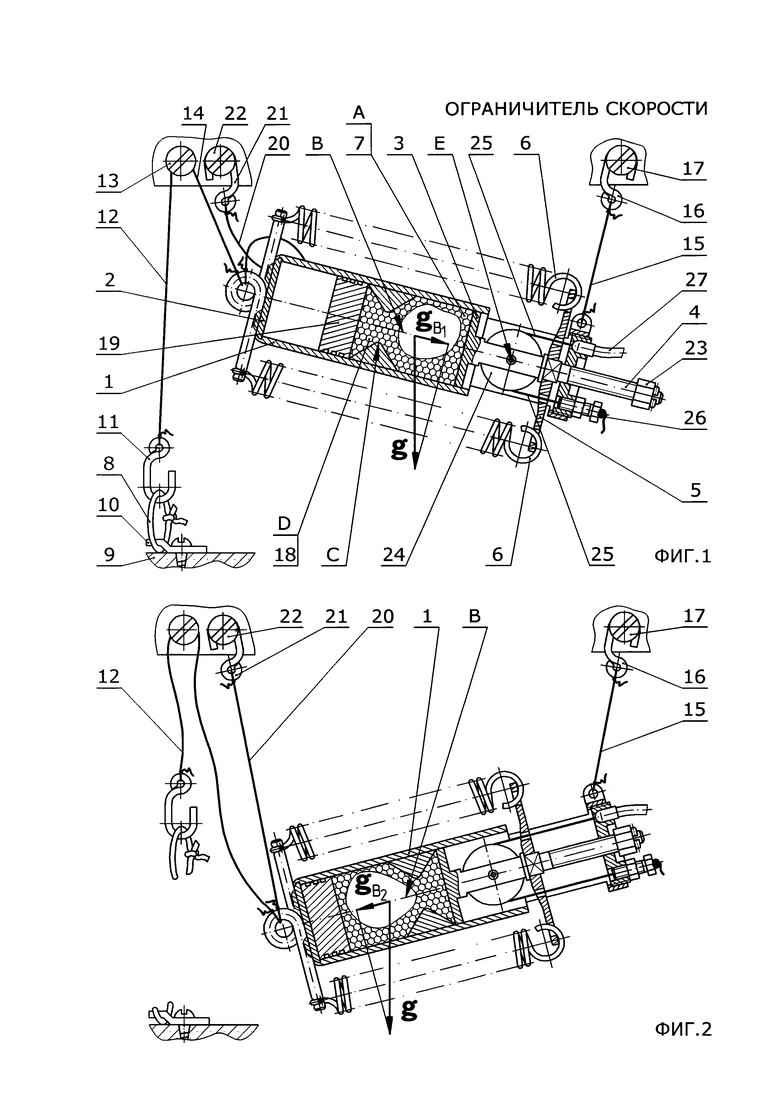
На фиг. 1 представлена часть автомата, содержащая предлагаемый ограничитель скорости движения рабочего поршня 3, находящегося в рабочем положении ждущего режима. Видно, что проекция  силы тяжести g сыпучего тела 7 на ось В рабочей камеры А направлена на рабочий поршень 3. На фиг. 2 представлена та же часть автомата в рабочем режиме работы ограничителя, при котором проекция
силы тяжести g сыпучего тела 7 на ось В рабочей камеры А направлена на рабочий поршень 3. На фиг. 2 представлена та же часть автомата в рабочем режиме работы ограничителя, при котором проекция  силы тяжести g сыпучего тела 7 на ось В направлена от рабочего поршня 3. В рабочем режиме работы ограничителя автомат смещает соответствующий запорный элемент в закрытое положение при разрушении стопора 8 аварийной водой, появляющейся на полу 9 охраняемого от затопления помещения. Прототипом автомата является устройство RU 2475600, МПК Е03С 1/04, F16P 5/00 (2006.01), 20.02.2013, Бюл. №5.
силы тяжести g сыпучего тела 7 на ось В направлена от рабочего поршня 3. В рабочем режиме работы ограничителя автомат смещает соответствующий запорный элемент в закрытое положение при разрушении стопора 8 аварийной водой, появляющейся на полу 9 охраняемого от затопления помещения. Прототипом автомата является устройство RU 2475600, МПК Е03С 1/04, F16P 5/00 (2006.01), 20.02.2013, Бюл. №5.
Наименование позиций и обозначений на фиг. 1 и 2.
1. Корпус части автомата. Содержит предлагаемый ограничитель скорости движения рабочего поршня 3.
2. Днище корпуса 1.
3. Рабочий поршень рабочей камеры А ограничителя скорости его движения.
4. Шток рабочего поршня 3, соосный ему и рабочей камере А.
5. Коромысло рабочего поршня 3. Симметрично относительно оси В. Посредством штока 4 рабочего поршня 3 передает на него рабочую силу рабочих пружин 6 автомата.
6. Рабочие пружины автомата. Предварительно растянуты. Создают постоянно действующую рабочую силу, передаваемую на рабочий поршень 3 посредством коромысла 5 и штока 4 рабочего поршня 3, лежащую на оси В и направленную на днище 2.
7. Сыпучее тело ограничителя скорости движения рабочего поршня 3. Состоит, например, из множества металлических шаров. В ждущем режиме блокирует, а в рабочем деблокирует рабочий поршень 3.
8. Стопор ограничителя скорости движения рабочего поршня 3. Посредством его цепи 10-8-11-12-13-14-1-15-16-17 удерживает элементы ограничителя в положении ждущего режима. При разрушении стопора аварийной водой элементы ограничителя оказываются в положении рабочего режима. Может быть выполнен, например, в виде бумажного кольца.
9. Пол охраняемого от затопления помещения.
10. Зацеп пола.
11. Крючок.
12. Левая ветвь каната стопора 8.
13. Кронштейн помещения.
14. Правая ветвь каната стопора 8.
15. Правый канат корпуса 1.
16. Крючок.
17. Кронштейн помещения.
18. Дополнительное сыпучее тело. Вводится при необходимости помочь проекцией силы его тяжести на ось В сыпучему телу 7 заблокировать рабочий поршень 3.
19. Поршень камеры D сброса сыпучего тела 7. Вводится при необходимости помочь проекцией силы его тяжести на ось В сыпучему телу 7 заблокировать соосный рабочий поршень 3.
20. Левый канат корпуса 1.
21. Крючок.
22. Кронштейн помещения.
23. Гайка штока 4. Образует с ним самотормозящуюся винтовую кинематическую пару. Используется для зарядки автомата энергией, то есть преодоления рабочей силы рабочих пружин 6 и смещения рабочего поршня 3 и связанных с ним деталей в рабочее положение ждущего режима.
24. Тросовый блок рабочего поршня 3. Имеет возможность вращательного движения вокруг его оси Е, неподвижной относительно рабочего поршня 3. Удваивает ход подвижной ветви троса 25 относительно хода рабочего поршня 3. Позволяет существенно уменьшить габариты представленной на фиг. 1 и 2 части автомата.
25. Трос автомата. Обычным образом охватывает тросовый блок 24. Преобразует параметры движения рабочего поршня 3 и передает его в запорное устройство источника воды.
26. Конец троса 25.
27. Гибкая труба автомата. Продольно несжимаема. Содержит трос 25, имеющий возможность движения вдоль ее центровой линии. Один ее конец неподвижно закреплен на крайней правой части корпуса 1, а другой - на запорном устройстве источника воды.
А - рабочая камера ограничителя скорости движения рабочего поршня 3.
В - ось рабочей камеры А. Является общей для рабочего поршня 3, его штока 4, гайки 23 и поршня 19 камеры D. Является также осью симметрии для коромысла 5.
С - дроссельное отверстие. Расположено между рабочей камерой А и камерой D сброса сыпучего тела 7. Площадь его проходного сечения меньше площади поперечного сечения рабочей камеры А.
D - камера сброса сыпучего тела 7. Может содержать дополнительное сыпучее тело 18 или груз в виде поршня 19 или то и другое вместе. При наличии поршня 19 имеет форму прямого кругового цилиндра с осью, совпадающей с осью В.
Е - ось вращения тросового блока 24. Перпендикулярна оси В и жестко связана с рабочим поршнем 3.
g - сила тяжести сыпучего тела 7 (вектор).
 - проекция силы тяжести g сыпучего тела 7 на ось В рабочей камеры А в положении ждущего режима работы ограничителя (вектор).
- проекция силы тяжести g сыпучего тела 7 на ось В рабочей камеры А в положении ждущего режима работы ограничителя (вектор).
 - проекция силы тяжести g сыпучего тела 7 на ось В рабочей камеры А в положении рабочего режима работы ограничителя (вектор).
- проекция силы тяжести g сыпучего тела 7 на ось В рабочей камеры А в положении рабочего режима работы ограничителя (вектор).
Предлагаемый ограничитель скорости движения рабочего поршня содержится в части автомата (фиг. 1 и 2), имеющей корпус 1 с днищем 2. Внутри корпуса 1 находится рабочая камера А ограничителя скорости движения рабочего поршня 3, имеющая форму прямого кругового цилиндра с осью В. В одном основании этого цилиндра выполнено сквозное дроссельное отверстие С, а другое является днищем рабочего поршня 3, имеющего возможность возвратно-поступательного движения вдоль оси В рабочей камеры А. На рабочий поршень 3, посредством жестко соединенного с ним соосного штока 4 рабочего поршня 3 и симметричного относительно оси В коромысла 5 рабочего поршня 3, передается постоянно действующая рабочая сила предварительно растянутых рабочих пружин 6. Вектор этой силы лежит на оси В и сонаправлен скорости движения рабочего поршня 3 в направлении днища 2. В прямо противоположном направлении на рабочий поршень 3 действует сила сыпучего тела 7, состоящего из множества металлических шаров. Для обеспечения движения рабочего поршня 3 в режиме ограничиваемой скорости, сыпучее тело 7 имеет возможность выхода из рабочей камеры А в камеру D сброса сыпучего тела 7 и наоборот, только через расположенное между ними дроссельное отверстие С.При этом площадь его проходного сечения меньше площади поперечного сечения рабочей камеры А.
В ждущем режиме (фиг. 1) элементы ограничителя и автомата расположены и зафиксированы цепью 10-8-11-12-13-14-1-15-16-17 со стопором 8 в положении, при котором проекция  силы тяжести g сыпучего тела 7 на ось В рабочей камеры А направлена на рабочий поршень 3. Указанная цепь содержит закрепленный на полу 9 зацеп 10, стопор 8, крючок 11, левую ветвь 12 каната стопора 8, кронштейн 13 помещения, правую ветвь 14 каната стопора 8, корпус 1, правый канат 15 корпуса 1, крючок 16 и кронштейн 17 помещения. При этом частицы сыпучего тела 7 не имеют возможности высыпаться из рабочей камеры А и при достаточной величине суммы проекции силы его тяжести на ось В, силы внутреннего трения и силы трения о внутренние поверхности рабочей камеры А блокируют рабочий поршень 3, находящегося под действием рабочей силы рабочих пружин 6, за вычетом соответствующих проекций сил тяжести на ось В. В противном случае, камера D сброса сыпучего тела 7 содержит некоторое количество дополнительного сыпучего тела 18 или груз в виде поршня 19, или то и другое вместе. При наличии поршня 19, камера D имеет форму прямого кругового цилиндра с осью, совпадающей с осью В, вдоль которой имеет возможность возвратно-поступательного движения поршень 19. Дополнительное сыпучее тело 18 камеры D и ее поршень 19 помогают проекциями сил их тяжести на ось В сыпучему телу 7 заблокировать рабочий поршень 3 в ждущем режиме работы ограничителя.
силы тяжести g сыпучего тела 7 на ось В рабочей камеры А направлена на рабочий поршень 3. Указанная цепь содержит закрепленный на полу 9 зацеп 10, стопор 8, крючок 11, левую ветвь 12 каната стопора 8, кронштейн 13 помещения, правую ветвь 14 каната стопора 8, корпус 1, правый канат 15 корпуса 1, крючок 16 и кронштейн 17 помещения. При этом частицы сыпучего тела 7 не имеют возможности высыпаться из рабочей камеры А и при достаточной величине суммы проекции силы его тяжести на ось В, силы внутреннего трения и силы трения о внутренние поверхности рабочей камеры А блокируют рабочий поршень 3, находящегося под действием рабочей силы рабочих пружин 6, за вычетом соответствующих проекций сил тяжести на ось В. В противном случае, камера D сброса сыпучего тела 7 содержит некоторое количество дополнительного сыпучего тела 18 или груз в виде поршня 19, или то и другое вместе. При наличии поршня 19, камера D имеет форму прямого кругового цилиндра с осью, совпадающей с осью В, вдоль которой имеет возможность возвратно-поступательного движения поршень 19. Дополнительное сыпучее тело 18 камеры D и ее поршень 19 помогают проекциями сил их тяжести на ось В сыпучему телу 7 заблокировать рабочий поршень 3 в ждущем режиме работы ограничителя.
При взаимодействии с аварийной водой стопор 8 утрачивает стопорную функцию и часть 10-8-11-12-13-14 его цепи замещается левым канатом 20 корпуса 1, крючком 21 и кронштейном 22 помещения. Таким образом, элементы ограничителя оказываются в положении рабочего режима его работы (фиг. 2), при котором проекция  силы тяжести g сыпучего тела 7 на ось В рабочей камеры А направлена от рабочего поршня 3. Тоже происходит и с проекциями сил тяжести на ось В дополнительного сыпучего тела 18 и поршня 19 камеры D, если они имеют место быть. Теперь частицы сыпучего тела 7 рабочей камеры А получают возможность высыпаться и выталкиваться из нее разблокированным рабочим поршнем 3 под действием рабочей силы рабочих пружин 6 и соответствующих проекций сил тяжести на ось В, а поршень 3 - возможность движения с ограниченной скоростью в сторону днища 2.
силы тяжести g сыпучего тела 7 на ось В рабочей камеры А направлена от рабочего поршня 3. Тоже происходит и с проекциями сил тяжести на ось В дополнительного сыпучего тела 18 и поршня 19 камеры D, если они имеют место быть. Теперь частицы сыпучего тела 7 рабочей камеры А получают возможность высыпаться и выталкиваться из нее разблокированным рабочим поршнем 3 под действием рабочей силы рабочих пружин 6 и соответствующих проекций сил тяжести на ось В, а поршень 3 - возможность движения с ограниченной скоростью в сторону днища 2.
Для зарядки автомата энергией, то есть преодоления рабочей силы рабочих пружин 6 и смещения рабочего поршня 3 с его коромыслом 5 и концами рабочих пружин 6 в рабочее положение ждущего режима, используется самотормозящаяся винтовая кинематическая пара в виде гайки 23, охватывающей резьбовую часть штока 4 рабочего поршня 3.
Далее представлены элементы части автомата, не имеющие прямого отношения к предлагаемому устройству.
Жестко связанная с рабочим поршнем 3, возможность возвратно-поступательного движения вдоль оси В имеет перпендикулярная ей ось Е вращения тросового блока 24, охваченного обычным образом тросом 25. Конец 26 троса 25 и конец гибкой трубы 27, внутри которой имеет возможность возвратного движения трос 25, закреплены на крайней правой части корпуса 1. Другие (удаленные) концы троса 25 и гибкой трубы 27 закреплены, соответственно, в и на запорном устройстве источника воды для изменения положения его запорного элемента.
Предлагаемый ограничитель скорости движения рабочего поршня 3, находящийся в части автомата, работает следующим образом.
Ждущий режим автомата (фиг. 1) есть состояние напряженного покоя всех тех его элементов, чье положение относительно корпуса 1, как тела отсчета, зависит от положения рабочего поршня 3. Для обеспечения этого состояния элементы ограничителя и автомата расположены и зафиксированы цепью 10-8-11-12-13-14-1-15-16-17 со стопором 8 в положении, при котором проекция  силы тяжести g сыпучего тела 7 на ось В рабочей камеры А направлена на рабочий поршень 3. При этом частицы сыпучего тела 7 не имеют возможности высыпаться из рабочей камеры А, и при достаточной величине сил
силы тяжести g сыпучего тела 7 на ось В рабочей камеры А направлена на рабочий поршень 3. При этом частицы сыпучего тела 7 не имеют возможности высыпаться из рабочей камеры А, и при достаточной величине сил  внутреннего трения и трения о внутренние поверхности рабочей камеры А блокируют рабочий поршень 3, то есть препятствуют его движению под действием рабочей силы рабочих пружин 6 за вычетом соответствующих проекций сил тяжести на ось В. В противном случае, камера D сброса сыпучего тела 7 содержит некоторое количество дополнительного сыпучего тела 18 или груз в виде поршня 19, или то и другое вместе, помогающих проекциями сил их тяжести на ось В сыпучему телу 7 заблокировать рабочий поршень 3.
внутреннего трения и трения о внутренние поверхности рабочей камеры А блокируют рабочий поршень 3, то есть препятствуют его движению под действием рабочей силы рабочих пружин 6 за вычетом соответствующих проекций сил тяжести на ось В. В противном случае, камера D сброса сыпучего тела 7 содержит некоторое количество дополнительного сыпучего тела 18 или груз в виде поршня 19, или то и другое вместе, помогающих проекциями сил их тяжести на ось В сыпучему телу 7 заблокировать рабочий поршень 3.
При взаимодействии с аварийной водой, появляющейся на полу 9 охраняемого помещения, стопор 8 утрачивает стопорную функцию, как и его цепь 10-8-11-12-13-14-1-15-16-17. Под действием сил гравитации корпус 1 с элементами ограничителя и автомата перемещается в положение рабочего режима его работы (фиг. 2). При этом часть 10-8-11-12-13-14 цепи стопора 8 замещается ветвью 20-21-22, а проекция  силы тяжести g сыпучего тела 7 на ось В рабочей камеры А направляется от рабочего поршня 3. То же происходит и с проекциями сил тяжести на ось В дополнительного сыпучего тела 18 и поршня 19 камеры D, если они имеют место быть. Теперь частицы сыпучего тела 7 высыпаются и выталкиваются из рабочей камеры А разблокированным рабочим поршнем 3 под действием рабочей силы пружин 6 и соответствующих проекций сил тяжести на ось В за вычетом сил трения.
силы тяжести g сыпучего тела 7 на ось В рабочей камеры А направляется от рабочего поршня 3. То же происходит и с проекциями сил тяжести на ось В дополнительного сыпучего тела 18 и поршня 19 камеры D, если они имеют место быть. Теперь частицы сыпучего тела 7 высыпаются и выталкиваются из рабочей камеры А разблокированным рабочим поршнем 3 под действием рабочей силы пружин 6 и соответствующих проекций сил тяжести на ось В за вычетом сил трения.
Уменьшение объема сыпучего тела 7 в рабочей камере А, является причиной движения рабочего поршня 3 вместе со штоком 4, гайкой 23, коромыслом 5, концами рабочих пружин 6 и осью вращения Е тросового блока 24. При этом механизм тросового блока 24 увеличивает в два раза ход и скорость движения троса 25, а его удаленный конец смещает запорный элемент запорного устройства источника воды в закрытое положение.
Приведение автомата и ограничителя скорости движения рабочего поршня 3 в рабочее положение ждущего режима осуществляется завинчиванием до упора гайки 23 на резьбовой части штока 4. При этом, вместе со штоком 4 в соответствующее ждущему режиму положение относительно корпуса 1, смещаются тросовый блок 24, рабочий поршень 3 и коромысло 5 с концами растягивающихся и запасающихся энергией рабочих пружин 6. Так как одна ветвь гибкой трубы 27 с тросом 25 (ввиду их гибкости) не может обеспечить двусторонней механической связи между рабочим поршнем 3 и запорным элементом источника воды без лишнего здесь силового замыкания, запорный элемент остается в закрытом положении. Затем корпус 1 с элементами ограничителя и автомата поворачивается в вертикальной плоскости в положение, при котором проекция силы тяжести сыпучего тела 7 на ось В направлена на рабочий поршень 3 и, примерно, совпадает с ней. После перемещения сыпучего тела 7 (дополнительного сыпучего тела 18 или поршня или того и другого вместе) гравитационными силами на свое место, рабочий поршень 3 оказывается зафиксированным и готовым принять силу растянутых рабочих пружин 6 от гайки 23. Свободная, она отвинчивается до конца штока 4 и фиксируется там силами трения. Затем корпус 1 с элементами ограничителя и частей автомата крепится цепью 10-8-11-12-13-14-1-15-16-17 со стопором 8 в положении ждущего режима (фиг. 1). И, наконец, рукоятка запорного устройства источника воды вручную смещается в открытое положение, при котором посредством троса 25 и гибкой трубы 27 вновь обеспечивается односторонняя механическая связь между рабочим поршнем 3 и запорным элементом источника воды.
Существуют и другие варианты исполнения совокупности существенных признаков предлагаемого устройства «…цепь со стопором, при утрате которым стопорной функции происходит переход ограничителя из ждущего режима работы в рабочий…», входящих в формулу этого изобретения.
Например, при прочих равных условиях, положение элементов ограничителя в рабочем режиме может определяться высотой буфера пола 9, заменяющего ветвь 20-21-22 и являющегося опорой левой части корпуса 1.
Можно ничем, кроме уже имеющейся ветви 15-16-17 цепи 10-8-11-12-13-14-1-15-16-17 со стопором 8, не определять положение элементов ограничителя в рабочем режиме его работы.
Существует вариант с устанавливаемой на полу рамой, в которой с возможностью вращения вокруг горизонтальной оси установлен корпус с элементами ограничителя и автомата. При этом траектория любой точки корпуса относительно рамы лежит в вертикальной плоскости.
В ждущем режиме (подобно фиг. 1) правая от оси вращения часть корпуса посредством каната, крючка и стопора, соединена с близким к полу зацепом рамы. На левую от оси вращения часть корпуса действует сила веса элементов ограничителя и автомата, момент которой относительно оси вращения уравновешивается соответствующим моментом силы стопора.
При разрушении стопора указанное равновесие нарушается, и корпус получает возможность повернуться против часовой стрелки вокруг оси вращения в положение рабочего режима работы ограничителя (подобно фиг. 2).
Ограничитель предназначен для одностороннего механического воздействия на объект управления. Может быть частью чисто механической системы аварийной защиты. В корпусе выполнена рабочая камера. Объем рабочей камеры зависит от положения рабочего поршня. Рабочая камера заполнена сыпучим телом. Сыпучее тело имеет возможность выхода из рабочей камеры только в камеру сброса сыпучего тела через дроссельное отверстие. Площадь проходного сечения отверстия меньше площади поперечного сечения рабочей камеры. Режим работы ограничителя зависит от ориентации оси рабочей камеры в гравитационном поле. Цепь, фиксирующая положение оси рабочей камеры в ждущем режиме, утрачивает фиксирующую функцию при появлении ожидаемого аварийного фактора. Движение рабочего поршня осуществляется благодаря естественному выходу сыпучего тела из рабочей камеры в камеру сброса сыпучего тела без привлечения внешнего источника энергии. Технический результат - упрощение изготовления и эксплуатации устройства, уменьшение его габарита. 2 ил.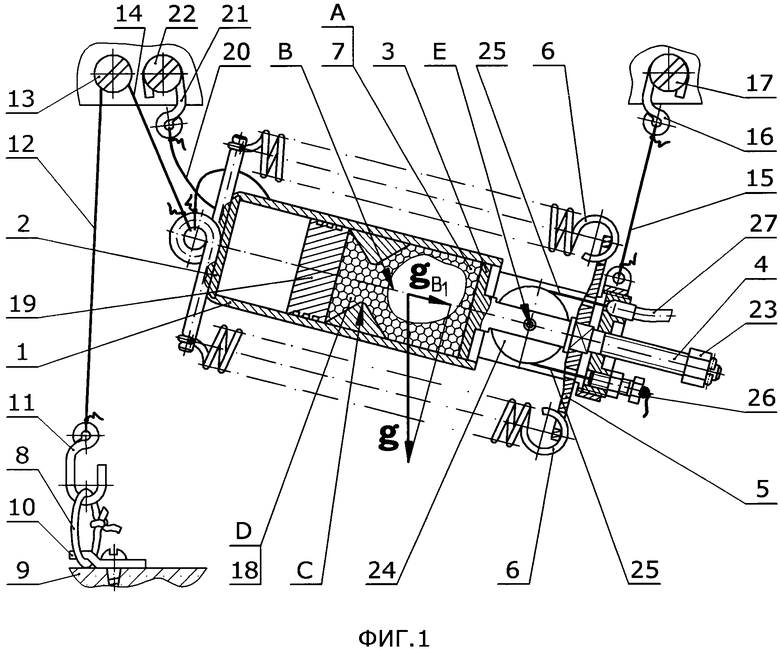
Ограничитель скорости движения тела, например, рабочего поршня, содержащий заполненную сыпучим телом рабочую камеру, объем которой зависит от положения рабочего поршня и сообщающуюся посредством дроссельного отверстия с камерой сброса сыпучего тела, цепь со стопором, при утрате которым стопорной функции происходит переход ограничителя из ждущего режима работы в рабочий, отличающийся тем, что при указанном переходе элементы ограничителя имеют возможность перемещения таким образом, что проекция силы тяжести сыпучего тела на ось рабочей камеры в ждущем режиме работы ограничителя направлена на рабочий поршень, а в рабочем режиме - от него.
| ОГРАНИЧИТЕЛЬ СКОРОСТИ ДВИЖЕНИЯ ТЕЛА | 2015 |
|
RU2623612C2 |
| УСТРОЙСТВО АВАРИЙНОГО ОТКЛЮЧЕНИЯ ПОДАЧИ ВОДЫ | 2011 |
|
RU2475600C2 |
| ДЕМПФЕР | 1991 |
|
RU2010129C1 |
| US 1963687 A, 19.06.1934 | |||
| Способ изготовления деталей типа лопаток з титановых сплавов | 1974 |
|
SU633682A1 |

