Изобретение относится к измерительной технике, в частности к способам оценки технического состояния подводных и подземных коммуникаций.
Такие коммуникации относятся к опасным объектам, доступ к ним затруднен. Особая важность этих объектов, например в трубопроводном транспорте, вызывает необходимость систематического контроля их технического состояния. Поэтому задача разработки способов оценки их технического состояния является очень важной.
К важнейшим параметрам, характеризующим техническое состояние подводных коммуникаций, относятся:
- защищенность от воздействия внешних факторов, характеризуемая значением защитного слоя над верхней образующей коммуникации;
- состояние изоляционного покрытия, характеризуемое распределением потерь токов, протекающих в коммуникации.
Аналогом предложенного способа является способ, описанный в Авт.св. СССР № 602901, опубл. 1978 г. Данный способ может быть применен для оценки технического состояния коммуникаций, в том числе подводных.
Способ включает в себя выполнение электромагнитными устройствами контроля расстояния до коммуникации путем измерения параметров электромагнитного поля, излучаемого коммуникацией. Однако данный способ ввиду конструктивного выполнения и расположения антенн требует сложных манипуляций. Кроме того, сложной является методика обработки результатов, не позволяющая выполнять измерения в реальном времени. Данное обстоятельство объясняется тем, что обработка результатов измерений требует выполнения всего объема измерений и только после этого можно приступить к совокупной обработке их результатов.
Наиболее близким к заявленному по технической сущности и достигаемым результатам является способ оценки технического состояния подводных коммуникаций, включающий измерения расстояния до дна водоема и анализ состояния дна гидроакустическими средствами, а также измерения параметров электромагнитного поля, излучаемого коммуникацией, при помощи электромагнитной антенны, состоящей из двух ортогонально расположенных измерительных преобразователей параметров электромагнитного поля, с определением расстояния до оси коммуникации, а также степени защищенности подводной коммуникации путем вычисления расстояния от дна водоема до верха конструкции коммуникации, и измерением потерь токов, протекающих по коммуникации, с определением состояния изоляционного покрытия, причем в точках измерений определяются их геодезические координаты, при этом упомянутые средства и устройства расположены на судне-носителе. (Автоматизированный мобильный комплекс «Система картографирования акваторий и трубопроводов» (АМК «СКАТ»), сайт научно-производственного предприятия Форт XXI http://www.fort21.ru, получено 13.05.2015. Однако данный способ трассировки коммуникации предусматривает обязательное движение судна-носителя галсами, перпендикулярными оси подводной коммуникации. При этом между галсами измерения не проводятся, что приводит к снижению достоверности получаемой информации. Особенно данный недостаток сказывается на больших водоемах, на которых расстояние между галсами достигает десятков и сотен метров, что сопоставимо с размерами возможных дефектов. Соответственно есть вероятность пропуска дефектов, в том числе критических и закритических. Кроме этого, время, необходимое для проведения измерений, значительно, т.к. для обработки результатов измерений требуется выполнить весь объем измерений, и только после этого можно приступить к совокупной обработке их результатов.
Была поставлена задача разработки такого способа оценки технического состояния подводных коммуникаций, который повысил бы достоверность оценки технического состояния подводных коммуникаций, снизил бы время и трудоемкость на проведение измерений.
Эта задача была решена настоящим изобретением.
В способе оценки технического состояния подводных коммуникаций, включающем выполнение измерения расстояния до дна водоема и анализ состояния дна гидроакустическими средствами, а также измерения параметров электромагнитного поля, излучаемого коммуникацией, электромагнитной антенной, состоящей из двух ортогонально расположенных измерительных преобразователей параметров электромагнитного поля, с определением расстояния до оси коммуникации, а также степени защищенности подводной коммуникации путем вычисления расстояния от дна водоема до верха конструкции коммуникации, и измерением потерь токов, протекающих по коммуникации, с определением состояния изоляционного покрытия, причем в точках измерений определяются их геодезические координаты, при этом упомянутые средства и устройства расположены на судне-носителе, согласно изобретению, все измерения и последующие вычисления осуществляются в квази непрерывном режиме, измерения параметров электромагнитного поля, излучаемого коммуникацией, осуществляются двумя пространственно-разнесенными антеннами, жестко соединенными между собой, каждая антенна включает в себя три взаимно ортогональных измерительных преобразователей параметров электромагнитного поля, причем при настройке линия соединения центров антенн выставляется горизонтально в плоскости, перпендикулярной продольной оси судна-носителя, два измерительных преобразователя каждой антенны выставляются в горизонтальной плоскости, причем ось одного из них совпадает с линией соединения центров антенн, а ось другого перпендикулярна этой линии, движение судна-носителя производят вдоль продольной оси коммуникации, причем начальную траекторию движения определяют путем трассировки коммуникации на берегах и построения электронной модели подводного перехода, при этом движение сопровождают вычислением значений пространственных смещений судна-носителя от оси коммуникации, а также углов между его продольной осью и продольной осью подводной коммуникации с последующим определением действительных значений параметров технического состояния подводной коммуникации, максимальные значения отклонений от оси коммуникации во время движения задаются требованиями по минимизации погрешностей оценки технического состояния подводной коммуникации, а определение состояния изоляционного покрытия производят путем анализа диаграммы распределения токов вдоль трубопровода, при этом защищенность подводной коммуникации определяется как расстояние по вертикали от дна водоема до верха конструкции коммуникации, вычисляемое как разность между расстоянием от линии соединения центров антенн до оси коммуникации и суммы трех слагаемых: расстояние от линии соединения центров антенн до поверхности водоема с расстоянием от антенны блока гидроакустики до дна водоема и с расстоянием от оси коммуникации до верха конструкции (определяется по проектным данным коммуникации).
Упомянутый способ может быть реализован с помощью устройства для оценки технического состояния подводных коммуникаций, содержащего судно-носитель с расположенными на нем компьютером, блоком гидроакустики, блоком определения координат точек измерений, а также блоком измерения тока и расстояния до оси коммуникации, включающим в себя антенну с взаимно ортогональными измерительными преобразователями параметров электромагнитного поля коммуникации и блок обработки сигналов, выходы измерительных преобразователей параметров электромагнитного поля коммуникации соединены с соответствующими входами блока обработки сигналов, выход которого соединен с первым входом компьютера, а выходы блока гидроакустики и блока определения координат точек измерений соединены соответственно с вторым и третьим входами компьютера, отличающееся тем, что блок измерения тока и расстояния до оси коммуникации содержит вторую антенну, обе антенны пространственно разнесены и жестко связаны между собой, каждая антенна включает в себя три взаимно ортогональных измерительных преобразователей параметров электромагнитного поля коммуникации, причем линия соединения центров антенн изначально лежит в горизонтальной плоскости, перпендикулярной продольной оси судна-носителя, два измерительных преобразователя каждой антенны изначально находятся в горизонтальной плоскости, причем ось одного из них совпадает с линией соединения центров антенн, а ось другого перпендикулярна этой линии.
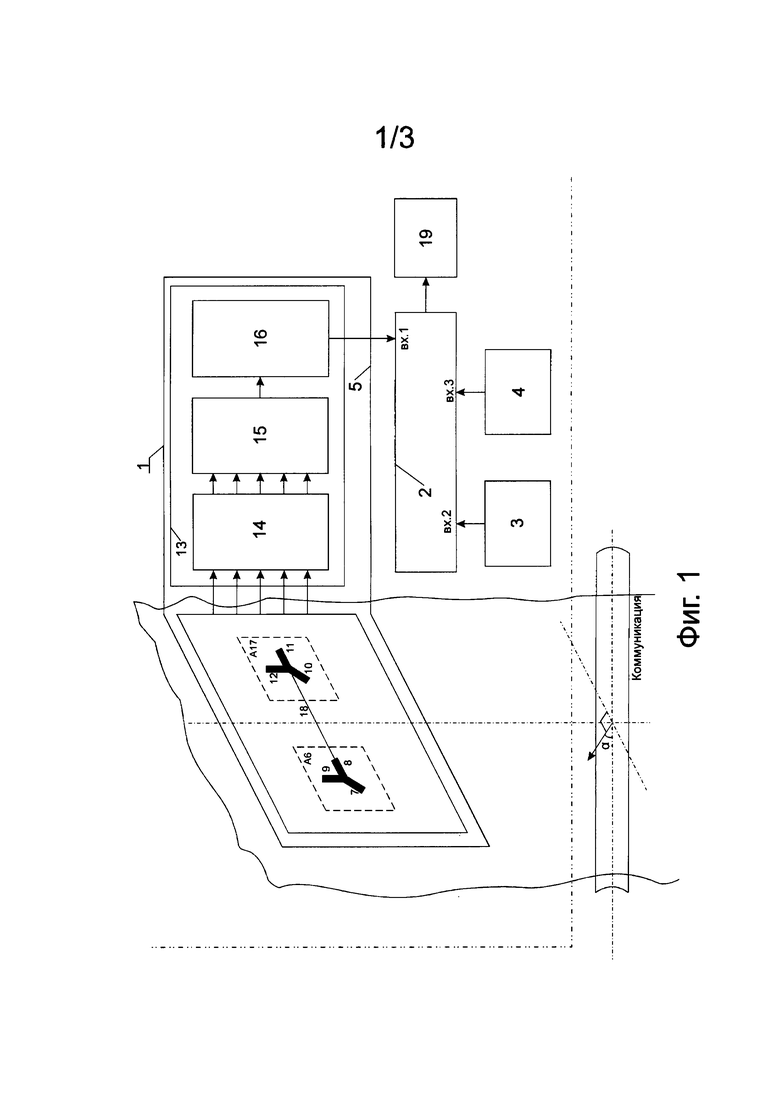
Устройство для оценки технического состояния подводных коммуникаций содержит судно-носитель 1. В качестве судна-носителя 1 может быть использовано любое плавательное средство, в том числе маломерное. На борту судна-носителя 1 располагаются:
- компьютер 2, которым может быть современный промышленный компьютер или ноутбук;
- блок гидроакустики 3. В состав блока гидроакустики 3 могут входить узколучевой или многолучевой эхолоты, гидролокатор бокового обзора, гидроакустический профилограф;
- блок определения координат точек измерений 4. Блок определения координат точек измерения 4 может быть реализован в виде спутниковой навигационной системы ГЛОНАСС или ДжиПиЭс, работающих в дифференциальном режиме и обладающих субметровой точностью;
- блок измерения тока и расстояния до оси коммуникации 5, включающий в себя антенну 6 и 17 с взаимно ортогональными измерительными преобразователями 7, 8, 9 и 10, 11, 12 параметров электромагнитного поля коммуникации. Измерительные преобразователи 7-12 могут быть выполнены в виде катушек индуктивности;
- блок обработки сигналов 13. Блок обработки сигналов 13 может включать в себя следующие стандартные блоки:
- блок выделения полезного сигнала 14, вход которого совпадает с входом блока обработки сигналов 13, к которому подключены соответствующие измерительные преобразователи 7-12. Блок выделения полезного сигнала 14 может быть реализован в виде кварцевых узкополосных избирательных фильтров с высокой добротностью, настроенных на частоту сигнала генератора, подключенного к коммуникации, и усилителей с регулируемым коэффициентом усиления, сигналы на выходе которых по уровню должны соответствовать требованиям мультиплексора 15 и аналого-цифрового преобразователя 16;
- мультиплексор 15, входы которого соединены с соответствующими выходами блока выделения полезного сигнала 14, а выход соединен с входом аналого-цифрового преобразователя 16,
- аналого-цифровой преобразователь 16, выход которого, являющийся выходом блока обработки сигналов 13, соединен с первым входом компьютера 2,
- выходы блока гидроакустики 3, блока определения координат точек измерений 4 соединены соответственно с вторым и третьим входами компьютера 2. Антенны 6 и 17 пространственно разнесены и жестко связаны между собой, причем линия соединения центров антенн 18 горизонтальна и лежит в плоскости, перпендикулярной продольной оси судна-носителя 1, два измерительных преобразователя 7 и 8 антенны 6 и два измерительных преобразователя 10 и 11 антенны 17 находятся в горизонтальной плоскости, причем ось одного из каждой пары измерительных преобразователей совпадает с линией соединения центров антенн 18, а ось другого перпендикулярна этой линии. Соответственно измерительные преобразователи 9 и 12 расположены вертикально.
Оценка технического состояния подводной коммуникации осуществляется следующим образом. С целью повышения достоверности и точности результатов контроля задается начальная траектория движения судна-носителя 1 путем трассировки коммуникации на берегах, снятия урезных линий и построения электронной модели подводного перехода. При этом предполагаемое положение коммуникации в русловой части определяется как продолжение продольной оси коммуникации, определенной на береговых участках. Далее (Фиг. 1), на борту судна-носителя 1 крепятся пространственно-разнесенные антенны 6 и 17, причем линия соединения центров антенн 18 выставляется горизонтально и в плоскости, перпендикулярной продольной оси судна-носителя 1, два измерительных преобразователя 7, 8 антенны 6 и два измерительных преобразователя 10 и 11 антенны 17 должны находиться в горизонтальной плоскости, причем ось одного из каждой пары измерительных преобразователей должна совпадать с линией соединения центров антенн 18, а ось другого должна быть перпендикулярна этой линии. Измеряется и запоминается расстояние от линии, соединяющей центры антенн 6 и 17 до поверхности водоема. Рабочее движение судна-носителя 1 осуществляется вдоль продольной оси коммуникации. При этом судоводитель пользуется специальной программой «судовождение», введенной в компьютер 2 и работающей по показаниям блока определения координат 4. При этом программа «судовождение» реализованная, например, в виде программы "AquaScan", входящая в состав комплекса АМК «Скат», на экране монитора 19 компьютера 2 отображает планируемую линию движения судна-носителя 1, совпадающую с продолжением продольной оси коммуникации от одного берега до совмещения с продольной осью на другом берегу, и реальную линию движения. Реальная линия движения строится в квазинепрерывном режиме по показаниям блока определения координат 4. Также в квазинепрерывном режиме производятся все другие измерения и вычисления. Шаг дискретности квазинепрерывного режима определяется дискретностью работы устройств блока гидроакустики 3 и блока определения координат 4 (например, частота 1 Гц). Во время движения производятся измерения расстояния блоком гидроакустики 3 (например, с помощью эхолота) до дна водоема и (например, с помощью профилографа) анализ состояния дна. Также блоком измерения тока и расстояния до оси коммуникации 5 производятся измерения параметров электромагнитного поля, излучаемого коммуникацией. Измерения параметров электромагнитного поля, излучаемого коммуникацией, осуществляются с помощью антенн 6 и 17, посредством измерительных преобразователей 7-12 параметров электромагнитного поля. В приведенном примере технической реализации в качестве сигналов от измерительных преобразователей 7-12 используется эдс индукции, наведенные от векторов напряженностей электромагнитного поля, излучаемого коммуникацией. Сигналы от измерительных преобразователей 7-12 поступают на соответствующие им вход блока обработки сигналов 13. В блоке выделения полезного сигнала 14 происходит выделение полезных сигналов с частотой генерации генератора, подключенного к коммуникации. Также в этом блоке идет согласование полезных сигналов по уровню с требованиями входов мультиплексора 15 и аналого-цифрового преобразователя 16. Мультиплексор 15 последовательно на вход аналого-цифрового преобразователя 16 подает аналоговые сигналы. Эти сигналы оцифровываются и в качестве выходных сигналов от блока обработки сигналов 13 поступают на вход 1 компьютера 2. При этом определяется расстояние до оси коммуникации, а также степень защищенности подводной коммуникации путем вычисления расстояния от дна водоема до верха конструкции коммуникации. Расстояние от дна водоема до верха конструкции коммуникации определяется как разность между расстоянием от центра линии соединения антенн 6 и 17 до оси коммуникации по вертикали и суммы трех слагаемых: расстояние от центров антенн 6 и 17 до поверхности водоема с расстоянием от антенны блока гидроакустики 3 до дна водоема и с расстоянием от оси коммуникации до верха конструкции (определяется по проектным данным коммуникации). Также происходит измерение токов, протекающих по коммуникации, с оценкой состояния изоляционного покрытия. Оценка расстояния до оси коммуникации и состояния изоляционного покрытия осуществляется в соответствии с ВРД ВРД 39-1.10-026-2001 МЕТОДИКА ОЦЕНКИ ФАКТИЧЕСКОГО ПОЛОЖЕНИЯ И СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ, ДОАО «ВНИИГАЗ», УДК 622.692.4.047. В каждой точке измерений блоком определения координат 4 определяются ее геодезические координаты.
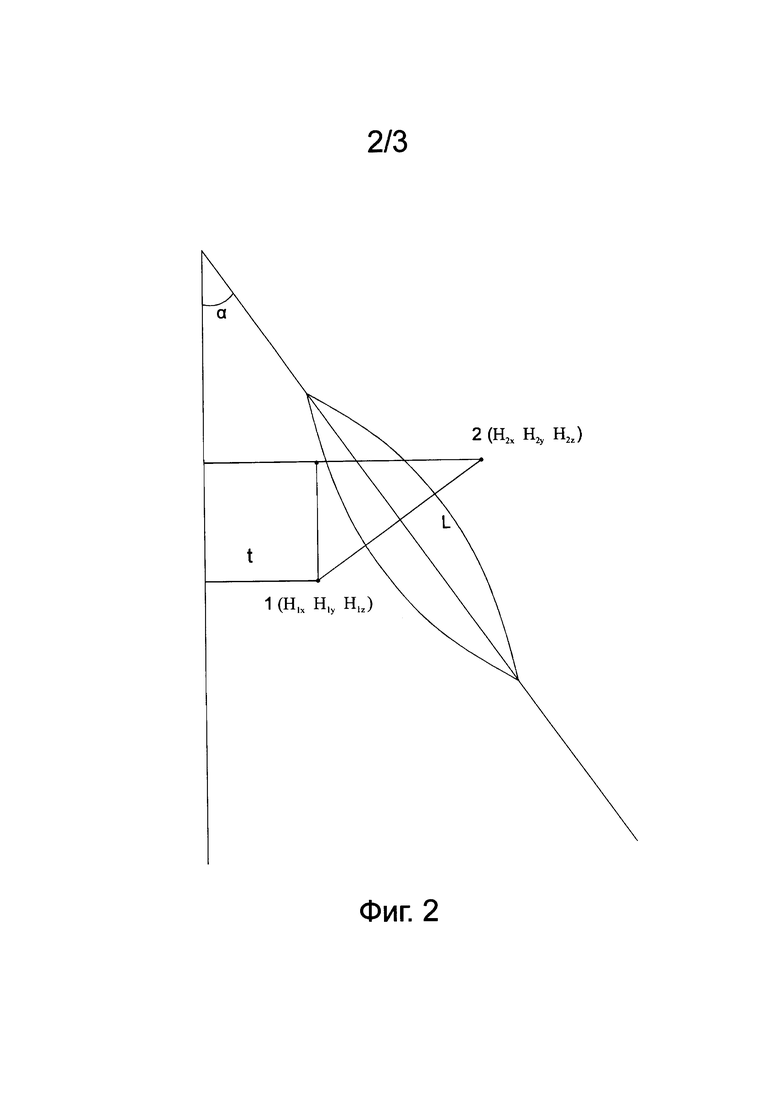
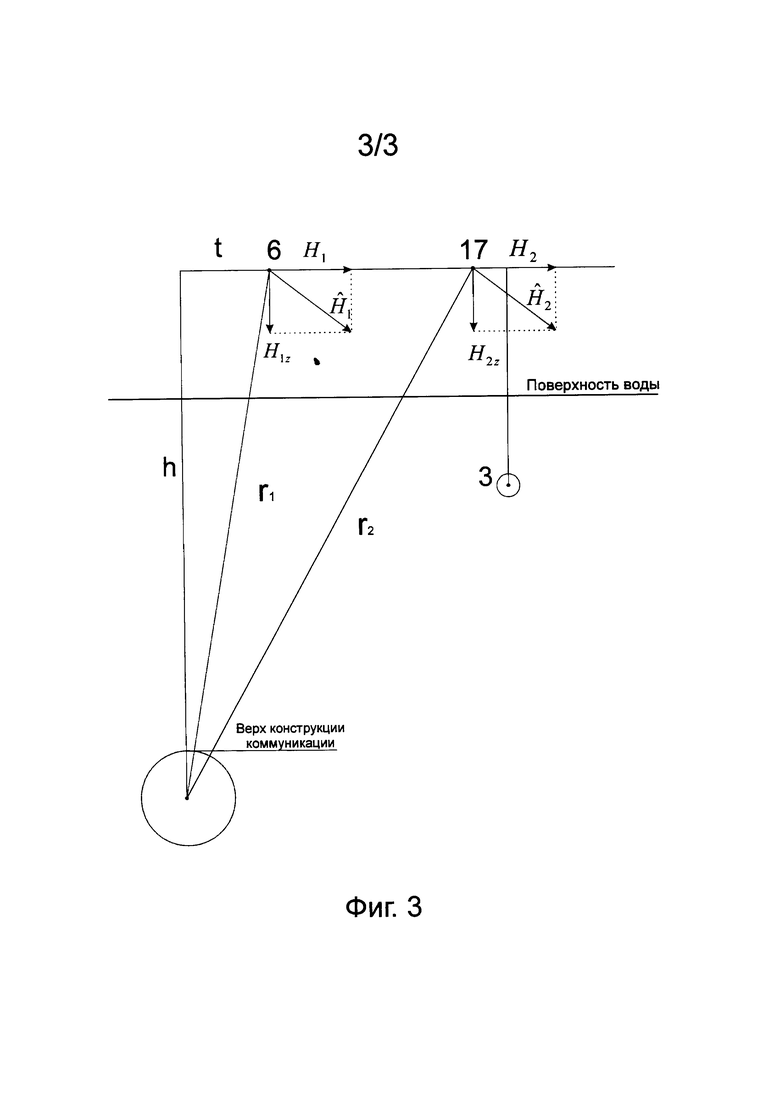
Процесс определения расстояния от центра линии соединения антенн 6 и 17 до оси коммуникации подводной коммуникации иллюстрируется Фиг. 2 и Фиг. 3. Дальнейшие расчеты исходят из модели, что бесконечный проводник с током I (коммуникация) проходит (лежит) в горизонтальной плоскости на расстоянии h ниже уровня антенны. Вдоль него по поверхности водоема перемещается судно-носитель 1 с антеннами 6 и 17. Измерения происходят в двух точках, разнесенных на расстояние L. Судно-носитель 1 движется вдоль оси коммуникации под некоторым углом α (0≤α≤αmах). Для положения судна-носителя 1, как показано на Фиг. 2, считаем угол α положительным. Оси измерительных преобразователей 8 в точках измерения расположены следующим образом:
- ось X лежит в горизонтальной плоскости, перпендикулярна продольной оси судна- носителя 1 и направлена слева направо;
- ось Y лежит в горизонтальной плоскости, направлена вдоль продольной оси судна - носителя 1 по ходу движения;
- ось Ζ перпендикулярна горизонтальной плоскости и направлена вертикально вверх. Предположим (суть выкладок от этого не меняется), что судно-носитель 1 находится справа от коммуникации и расстояние по ее проекции на горизонтальную плоскость от ближайшей точки измерения t.
Компоненты магнитного поля, измеряемые измерительными преобразователями 7-12, обозначим следующим образом:
H1x, H1y, H1z - для первой точки измерения
Н2х, Н2у, H2z - для второй точки измерения.
1) Условие нулевого поля вдоль коммуникации:


2) Обозначим через Hxy(12) компоненту магнитного поля, лежащую в горизонтальной плоскости и перпендикулярную проводнику. Тогда:


Полное магнитное поле в точках измерения можно записать в виде:
Модули напряженностей определяются следующим образом:
Условие перпендикулярности магнитного поля перпендикуляру из точки измерения на коммуникацию, учитывая подобие треугольников Фиг. 2, следующим образом:
Причем h=h1=h2.
Следовательно, можно записать:

3) Условие обратно пропорционального затухания магнитного поля от расстояния до коммуникации будет:
Таким образом, получаем:
Н1r1=Н2r2 или  , отсюда
, отсюда

Из приведенных соотношений легко получить уравнения для определения численных значений угла смещения судна-носителя 1 от оси коммуникации и смещения в горизонтальной плоскости ближайшей точки измерения от оси коммуникации.:


из уравнения (3) получаем: 
из уравнения (4) получаем: 
Вычитая из уравнения (7) уравнение (6), получаем:
Решая приведенные уравнения, легко определить расстояние от поверхности водоема до оси коммуникации:

Учитывая, что измерительные преобразователи 7-12 на выходе выдают измерительный сигнал в виде эдс, пропорционального напряженности поля, излучаемого коммуникацией, легко получить зависимости угла и величины смещения судна-носителя 1 от оси. При этом расстояние от поверхности водоема до оси коммуникации будет определяться с учетом смещений и рассчитываться компьютером 2.
Значение тока в коммуникации, наведенного от измерительного генератора, подключенного к ней, определяется следующим образом:

Значение коэффициента k постоянно и определяется конструктивными параметрами.
Аналогичными выкладками легко показать возможность введения поправок от крена и дифферента, являющихся источниками дополнительных погрешностей.
В процессе движения судна-носителя 1 в ходе оценки технического состояния подводной коммуникации возможен вариант его значительного ухода от реальной оси коммуникации. Судоводитель, зная теоретическое положение оси и реальные значения смещений, индицируемые на мониторе компьютера 2, легко может компенсировать эти значения ухода, что позволяет минимизировать дополнительные погрешности измерений, вызванные воздействием смещения судна-носителя 1 от требуемой траектории движения.
Также возможны пропадания электромагнитных сигналов от коммуникации из-за затухания сигналов, связанных с большим удалением от точки подключения генератора, или с значительными утечками тока в местах нарушения изоляционного покрытия. В этом случае имеется возможность продолжать контроль технического состояния подводного перехода с помощью гидроакустического профилографа или гидролокатора бокового обзора, входящих в состав блока гидроакустики 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОБИЛЬНОГО ПОИСКА МЕСТОРОЖДЕНИЙ УГЛЕВОДОРОДОВ И ДОННЫХ ОБЪЕКТОВ, ОБНАРУЖЕНИЯ ПРИЗНАКОВ ЗАРОЖДЕНИЯ ОПАСНЫХ ЯВЛЕНИЙ НА МОРСКОМ ШЕЛЬФЕ | 2015 |
|
RU2601773C2 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| РАДИОГИДРОАКУСТИЧЕСКАЯ СИСТЕМА МОБИЛЬНОГО ПОИСКА МЕСТОРОЖДЕНИЙ УГЛЕВОДОРОДОВ И ДОННЫХ ОБЪЕКТОВ, ОБНАРУЖЕНИЯ ПРИЗНАКОВ ЗАРОЖДЕНИЯ ОПАСНЫХ МОРСКИХ ЯВЛЕНИЙ НА МОРСКОМ ШЕЛЬФЕ | 2015 |
|
RU2601769C2 |
| ГОЛОГРАФИЧЕСКАЯ АКУСТООПТИЧЕСКАЯ СИСТЕМА ВИЗУАЛИЗАЦИИ ПОДВОДНЫХ ОБЪЕКТОВ В НАТУРНОМ ВОДОЕМЕ | 2003 |
|
RU2236691C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВОДНОГО ТРУБОПРОВОДА | 2011 |
|
RU2472178C1 |
| Способ установки морского полигона донных станций | 2023 |
|
RU2797702C1 |
| Глобальная радиогидроакустическая система мониторинга полей атмосферы, океана и земной коры в морской среде и распознавания источников их формирования | 2017 |
|
RU2691295C2 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| СИСТЕМА ПОИСКА МОРСКИХ МЕСТОРОЖДЕНИЙ УГЛЕВОДОРОДОВ | 2012 |
|
RU2503977C1 |
| СИСТЕМА ПАРАМЕТРИЧЕСКОГО ПРИЕМА ГИДРОФИЗИЧЕСКИХ И ГЕОФИЗИЧЕСКИХ ВОЛН В МОРСКОЙ СРЕДЕ | 2013 |
|
RU2536836C1 |
Заявлен способ оценки технического состояния подводных коммуникаций. Способ включает измерения расстояния до дна водоема и анализ состояния дна гидроакустическими средствами, а также измерения параметров электромагнитного поля, излучаемого коммуникацией. Измерения проводятся при помощи электромагнитной антенны, состоящей из ортогонально расположенных измерительных преобразователей параметров электромагнитного поля, с определением расстояния до оси коммуникации, а также значения защищенности подводной коммуникации путем вычисления расстояния от дна водоема до верха конструкции коммуникации, и измерением потерь токов, протекающих по коммуникации. Измерения проводятся с определением состояния изоляционного покрытия. При этом в точках измерений определяются их геодезические координаты. Упомянутые средства и устройства расположены на судне-носителе. Согласно изобретению все измерения и последующие вычисления осуществляются в квазинепрерывном режиме. Измерения параметров электромагнитного поля, излучаемого коммуникацией, осуществляются двумя пространственно разнесенными антеннами, жестко соединенными между собой. Каждая антенна включает в себя три взаимно ортогональных измерительных преобразователя параметров электромагнитного поля. При настройке линия соединения центров антенн выставляется горизонтально в плоскости, перпендикулярной продольной оси судна-носителя. Два измерительных преобразователя каждой антенны выставляются в горизонтальной плоскости, причем ось одного из них совпадает с линией соединения центров антенн, а ось другого перпендикулярна этой линии. Движение судна-носителя производят вдоль продольной оси коммуникации. Начальную траекторию движения определяют путем трассировки коммуникации на берегах и построения электронной модели подводного перехода. Движение сопровождают вычислением значений пространственных смещений судна-носителя от оси коммуникации, а также углов между его продольной осью и продольной осью подводной коммуникации с последующим определением действительных значений параметров технического состояния подводной коммуникации. Максимальные значения отклонений от оси коммуникации во время движения задают требованиями по минимизации погрешностей оценки технического состояния подводной коммуникации. Определение состояния изоляционного покрытия производят путем анализа диаграммы распределения токов вдоль трубопровода. Защищенность подводной коммуникации определяется как расстояние по вертикали от дна водоема до верха конструкции коммуникации, вычисляемое как разность между расстоянием от линии соединения центров антенн до оси коммуникации и суммы трех слагаемых: расстояние от линии соединения центров антенн до поверхности водоема, расстояние от антенны блока гидроакустики до дна водоема, расстояние от оси коммуникации до верха конструкции (определяется по проектным данным коммуникации). Заявлено также устройство для оценки технического состояния подводных коммуникаций. 2 н.п. ф-лы, 3 ил.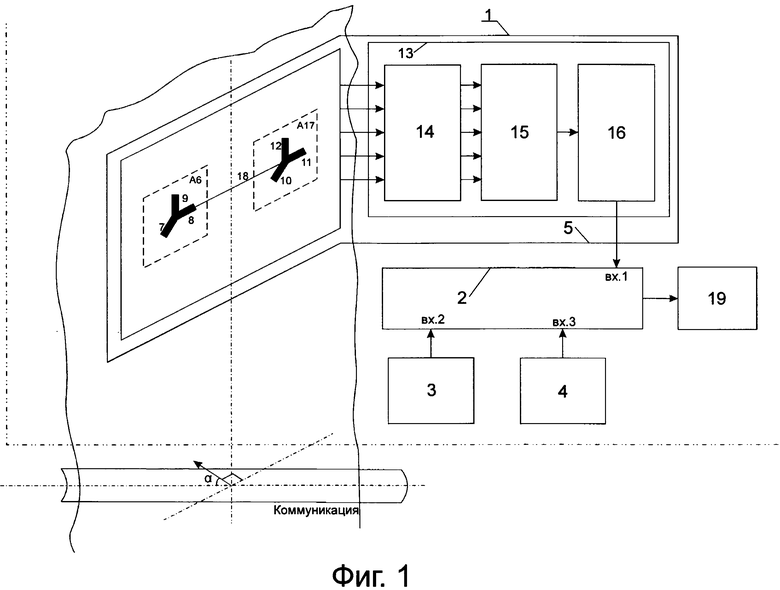
1. Способ оценки технического состояния подводных коммуникаций, включающий измерения расстояния до дна водоема и анализ состояния дна гидроакустическими средствами, а также измерения параметров электромагнитного поля, излучаемого коммуникацией, при помощи электромагнитной антенны, состоящей из ортогонально расположенных измерительных преобразователей параметров электромагнитного поля, с определением расстояния до оси коммуникации, а также значения защищенности подводной коммуникации путем вычисления расстояния от дна водоема до верха конструкции коммуникации, и измерением потерь токов, протекающих по коммуникации, с определением состояния изоляционного покрытия, причем в точках измерений определяются их геодезические координаты, при этом упомянутые средства и устройства расположены на судне-носителе, отличающийся тем, что все измерения и последующие вычисления осуществляются в квазинепрерывном режиме, измерения параметров электромагнитного поля, излучаемого коммуникацией, осуществляются двумя пространственно-разнесенными антеннами, жестко соединенными между собой, каждая антенна включает в себя три взаимно ортогональных измерительных преобразователя параметров электромагнитного поля, причем при настройке линия соединения центров антенн выставляется горизонтально в плоскости, перпендикулярной продольной оси судна-носителя, два измерительных преобразователя каждой антенны выставляются в горизонтальной плоскости, причем ось одного из них совпадает с линией соединения центров антенн, а ось другого перпендикулярна этой линии, движение судна-носителя производят вдоль продольной оси коммуникации, причем начальную траекторию движения определяют путем трассировки коммуникации на
берегах и построения электронной модели подводного перехода, при этом движение сопровождают вычислением значений пространственных смещений судна-носителя от оси коммуникации, а также углов между его продольной осью и продольной осью подводной коммуникации с последующим определением действительных значений параметров технического состояния подводной коммуникации, максимальные значения отклонений от оси коммуникации во время движения задаются требованиями по минимизации погрешностей оценки технического состояния подводной коммуникации, а определение состояния изоляционного покрытия производят путем анализа диаграммы распределения токов вдоль трубопровода, при этом защищенность подводной коммуникации определяется как расстояние по вертикали от дна водоема до верха конструкции коммуникации, вычисляемое как разность между расстоянием от линии соединения центров антенн до оси коммуникации и суммы трех слагаемых: расстояние от линии соединения центров антенн до поверхности водоема с расстоянием от антенны блока гидроакустики до дна водоема и с расстоянием от оси коммуникации до верха конструкции (определяется по проектным данным коммуникации).
2. Устройство для оценки технического состояния подводных коммуникаций, содержащее судно-носитель с расположенными на нем компьютером, блоком гидроакустики, блоком определения координат точек измерений, а также блоком измерения тока и расстояния до оси коммуникации, включающим в себя антенну с взаимно ортогональными измерительными преобразователями параметров электромагнитного поля коммуникации и блок обработки сигналов, выходы измерительных преобразователей параметров электромагнитного поля коммуникации соединены с соответствующими входами блока обработки сигналов, выход которого соединен с первым входом компьютера, а выходы блока
гидроакустики и блока определения координат точек измерений соединены соответственно с вторым и третьим входами компьютера, отличающееся тем, что блок измерения тока и расстояния до оси коммуникации содержит вторую антенну, обе антенны пространственно разнесены и жестко связаны между собой, каждая антенна включает в себя три взаимно ортогональных измерительных преобразователей параметров электромагнитного поля коммуникации, причем линия соединения центров антенн изначально лежит в горизонтальной плоскости, перпендикулярной продольной оси судна-носителя, два измерительных преобразователя каждой антенны изначально находятся в горизонтальной плоскости, причем ось одного из них совпадает с линией соединения центров антенн, а ось другого перпендикулярна этой линии.
| ЭХОЛОКАТОР ДЛЯ ПОИСКА ОБЪЕКТОВ ВБЛИЗИ ДНА, НА ДНЕ И В ПРИПОВЕРХНОСТНОМ СЛОЕ ДНА | 1992 |
|
RU2050559C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| Мониторинг подводных переходов магистральных трубопроводов на основе НСП | |||
| Информационно-рекламный проспект | |||
| ЗАО "Диагностика подводных трубопроводов" | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| US8447532 B1, 21.05.2013 | |||
| US8242793 B2, 14.08.2012. | |||

