13
робота. Кисть 19 руки 1 робота вращается с помощью червячной пары 6, 22 относительно вертикальной оси. Держатель 21 с жестко закрепленным на нем барабаном 30 приводится во вращение относительно оси 18 зубчатой конической парой через червячную пару 14, 10. Контроль вращения кисти 19 и держателя 21 осуществляется соответственно датчиками 24 и 27. Чер- вяки 6 и 10 через тяги 12 связаны с
1
Изобретение относится к машиностроению, а именно к конструкциям манипуляторов и промьшшенных роботов.
Цель изобретения - расширение зоны обслуживания и обеспечение стереотипности захвата при загрузке многоярусных прямоугольных контейнеров и складских полок путем применения кинематической связи между захватными органами и кистью робота.
На фиг. 1 представлена принципиальная схема стереотипного захвата промьгашенного робота; на фиг. 2 - разрез А-А на фиг.1;на фиг.З - разрез Б-Б на фиг. 1;на фиг.4 - разрез В-В на фиг. 1.
Захват промьшшенного робота состоит из руки 1, выполенной в виде двух пластин 2 и 3, жестко соединенных между собой. В пластинах 2 и 3 установлены подшипники 4 и 5. В подшипники 4 установлен полый вал с червяком 6, в котором в подшипниках 7 установлена коленчатая ось 8. В подшипниках 5 установлен на коленчатой оси 9 червяк 10.
На коленчатые оси 8 и 9 установлены подшипники 11, расположенные в тягах 12, кинематически связанных с приводом. На конце оси 8 расположена электромагнитная муфта 13, передающая вращающий момент с оси 8 на червяк 6. Червяк 10 связан с двойны червячным кол есом 14, установленным вместе с конической шестерней 15 на полом валу в подшипнике на опорной пластине 16. Коническая шестерня 15 связана с двойной конической шестерне
10202
приводом, в барабане 30 в подшипниках 31 установлены цилиндры 32 со штоками 33, к концам которых прикреплены пальцы 35 и толкатель 34. Стереотипное положение толкателя 34 и пальцев 35 при изменении положения захвата осуществляется с помощью цепной передачи, одна звездочка которой жестко закреплена на корпусе кисти 19, а другая жестко соединена с цилиндрами 32. 4 ил.
О
5
0
5
0
5
0
17,закрепленной на одном конце оси 18, установленной в корпусе .кисти 19 в подшипнике 20. Другой конец оси 18 жестко закреплен на корпусе держателя 21.
Вращение кисти 19 осуществляется червяком 6 через двойное червячное колесо 22, жестко установленные на оси 23, концы которой жестко закреплены на корпусе кисти 19. Вращение кисти 19 контролируется датчиком 24, связанньм с осью 23 через зубчатую пару, состоящую из двойной шестерни 25, установленной на оси датчика 24, и шестерни 26, установленной на ook 23. Вращение держателя 21 контролируется датчиком 27, связанным с полым валом червячного колеса 14 через зубчатую пару, состоящую из двойной шестерни 28, установленной на оси датчика 27, и шестерни 29, установленной на полом валу червячного колеса 14.
На держателе 21 жестко закреплен барабан 30, в корпусе которого в подшипниках 31 установлены два цилиндра 32 со штоками 33, к одному из которых прикреплен толкатель 34, а к другому - пальцы 35. Перемещение штока 33 происходит по направляющим штырям 36 и 37, установленным во втулках 38. К цилиндрам 32 жестко закреплена звездочка 39, связанная цепной передачей со звездочкой 40, жестко закрепленной на корпусе кисти 19.
Захват промьшшенного робота работает следующим образом.
313
Кисть 19 руки 1 получает движение от привода через тяги 12. Крутящий момент тягами 12 передается червячным самотормозящимся передачам. Ось 23, а с ней и кисть 19 руки 1 получа- ют вращательное движение от червячного колеса 22, контролируемое датчиком 24 через зубчатую пару 25 и 26.
Держатель 21 получает вращение от червячного колеса 14 через коническу пару шестерен 15 и 17 и ось 18, контролируемое датчиком 27 через зубчату пару 28 и 29. Поворот кисти 19 вокру вертикальной оси осуществляется в пределах ±90 .
Стереотипное положение толкателя 34 и пальцев 35 при изменении положения захвата достигается с помощью .цепной передачи. Загружаемьй предмет удерживается пальцами 35 и занимает стереотипное положение при повороте захвата вокруг горизонтальной оси 18
Цилиндры 32 со штоками 33 подсоединены к пневмосистеме. Подъем и перенос предметов осуществляется пальцами 35, а выгрузка - толкателем 34. Поворот кисти и захвата осуществляется как раздельно, так и вместе. Для этого служит электромагнитная муфта 13, установленная на коленчатой оси
8
О
5
0
5
0
8, которая при включении передает вращающий момент через червячную пару 6 и 22 на поворот кисти относительно вертикальной оси. Зубчатая коническая пара 15 и 17 вьшолнена безлюфтовой за счет исполнения вала двойным с пружинным механизмом.
Формула изобретения
Захват промьшшенного робота, содержащий руку, силовые цилиндры, цепную передачу, отличающийся тем,что, с целью расширения зоны обслуживания захвата и обеспечения стереотипности захвата при загрузке многоярусных прямоугольных контейнеров и складских полок, рука робота снабжена установленной на ней шарнирно приводной кистью, держателем, шарнирно закрепленным одним концом к кисти, и барабаном, неподвижно закрепленным на другом конце держателя, с установленными в нем с возможностью вращения относительно горизонтальной оси приводными толкателем и кольцами, кинематически связанными с корпусом кисти, при этом привод кисти состоит из самотормозяп хся червячных передач .
40 20 19
НУ
HHW
фиг.2
;4
10 5 k |0 0|
(pus.3
12
|0 0|
7/
7
12
, J
Л
J2
37
зе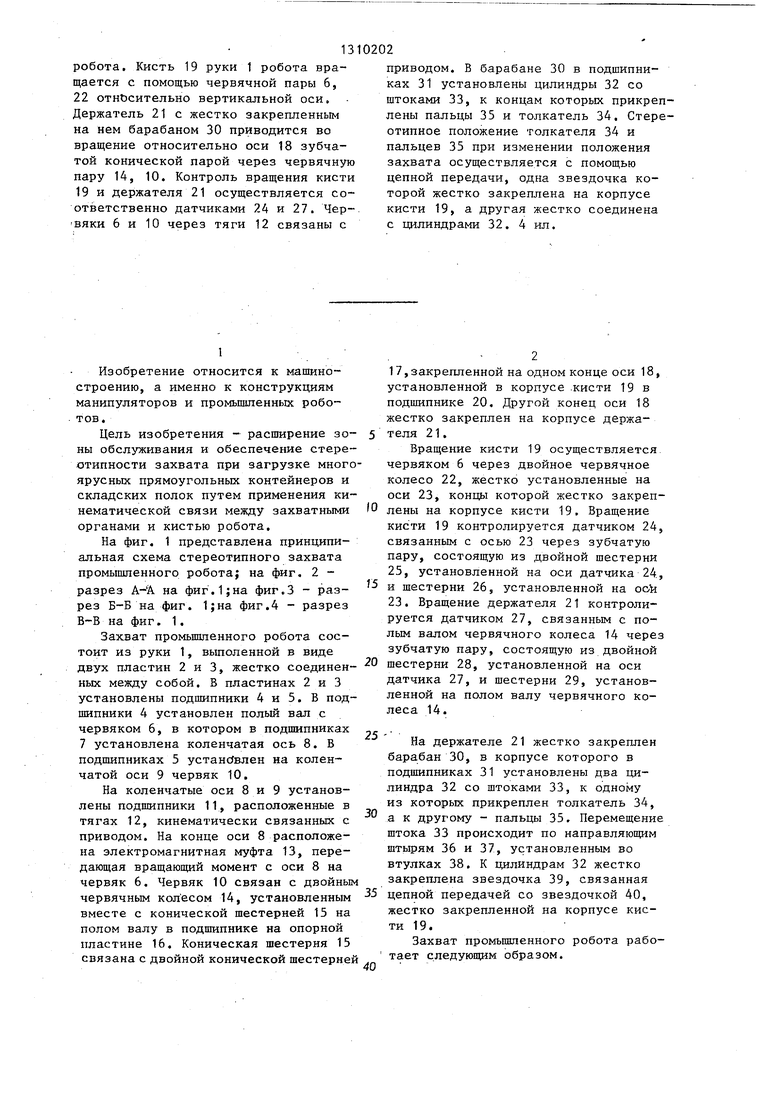

| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1978 |
|
SU847617A1 |
| Транспортный промышленный робот | 1987 |
|
SU1743845A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Промышленный робот | 1990 |
|
SU1805028A1 |
| Кисть механической руки промышленногоРОбОТА | 1979 |
|
SU841961A1 |
| Устройство рекуперации энергии колебательных движений поворотного звена | 1986 |
|
SU1384820A1 |
| Кисть манипулятора | 1987 |
|
SU1423372A1 |
| ИСКУССТВЕННАЯ БИОЭЛЕКТРИЧЕСКАЯ КИСТЬ РУКИ | 2021 |
|
RU2779492C1 |
| Манипулятор | 1984 |
|
SU1273243A1 |
| Устройство для выработки стекловолокна | 1978 |
|
SU890970A3 |
Изобретение относится к машино- строению, а именно к конструкциям манипуляторов и промышленных роботов. Цель изобретения - расширение зоны обслуживания захватом и обеспечение стереотипности захвата при загрузке многоярусных прямоугольных контейнеров и складских полок. Указанная цель достигается применением в конструкции кинематической связи между захватными органами и кистью J А 27 (риг.1 17 гз j
Составитель А.Чернышев Редактор И.Касарда Техред И.Попович Корректор Г. Решетник
Заказ 1854/14 Тираж 954 . Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
| Современные промышленные роботы | |||
| Каталог./ Под ред | |||
| Ю.Г.Козырева и Я.А.Шифрина | |||
| М.: Машиностроение, 1984, с.33,38. |
