Область техники, к которой относится изобретение
Изобретение относится к стратегиям управления выходным напряжением генератора переменного тока или встроенного стартера-генератора перед автоматической остановкой двигателя.
Уровень техники
Микрогибридное транспортное средство может останавливать двигатель внутреннего сгорания на промежуток времени в течение цикла вождения, когда скорость транспортного средства близка или равна нулю. Такие автоматические остановки двигателя могут снизить расход топлива за счет сокращения времени холостого хода двигателя (и, таким образом, потребления топлива) в течение поездки.
Раскрытие изобретения
В связи с этим было разработано механическое транспортное средство (транспортное средство), которое содержит двигатель, генератор переменного тока и по меньшей мере один контроллер. По меньшей мере один контроллер может получать данные об уровне естественного освещения и информацию о скорости транспортного средства и перед началом автоматической остановки двигателя понижать выходное напряжение генератора переменного тока или встроенного стартера-генератора на основании полученной информации.
Также представлен способ управления выходным напряжением генератора переменного тока или встроенного стартера-генератора транспортного средства, который может включать в себя определение порогового значения скорости транспортного средства, которое больше нуля, сравнение скорости транспортного средства с этим пороговым значением и, если скорость транспортного средства меньше или равна пороговому значению, понижение выходного напряжения генератора переменного тока или встроенного стартера-генератора перед началом автоматической остановки двигателя.
Также представлено транспортное средство, которое может содержать двигатель, генератор переменного тока или встроенный стартер-генератор и по меньшей мере один контроллер. По меньшей мере один контроллер может понижать выходное напряжение генератора переменного тока или встроенного стартера-генератора перед началом автоматической остановки двигателя.
Краткое описание чертежей
Фиг.1 представляет собой принципиальную схему микрогибридного транспортного средства.
Фиг.2 представляет собой блок-схему, иллюстрирующую алгоритм управления выходным напряжением генератора переменного тока или встроенного стартера-генератора.
Фиг.3 представляет собой график зависимости выходного напряжения генератора переменного тока или встроенного стартера-генератора от времени.
Фиг.4 представляет собой график зависимости скорости транспортного средства от времени.
Фиг.5 представляет собой график зависимости частоты вращения двигателя от времени.
Осуществление изобретения
Далее подробно описаны способы воплощения настоящего изобретения; однако следует понимать, что представленные здесь варианты осуществления изобретения являются лишь примерами изобретения, которые могут быть реализованы в различных альтернативных вариантах. На чертежах не всегда соблюдены реальные размеры, некоторые элементы могут быть увеличены или уменьшены с целью демонстрации деталей определенных составных частей. Таким образом, специфические структурные и функциональные детали, раскрытые в настоящем изобретении, следует рассматривать не в качестве ограничения, а в качестве иллюстративной части для изучения специалистами в данной области техники с целью различного применения настоящего изобретения.
В транспортных средствах, оборудованных системой непосредственного запуска или старт-стопной системой, двигатель может быть выключен, когда транспортное средство движется по инерции и останавливается или после того, как транспортное средство остановилось. Во время выключения двигателя максимальное напряжение силовой цепи транспортного средства снижается от значения выходного напряжения генератора переменного тока или встроенного стартера-генератора (обычно 14,5 вольт на холостых оборотах) до напряжения аккумуляторной батареи (обычно 12,5 вольт), если оно не поддерживается при помощи иных средств. Если такое снижение на 2 вольта напряжения системы применяется к фарам или иным осветительным устройствам транспортного средства во время выключения двигателя, может наблюдаться значительное снижение световой мощности (в люменах), в частности, при низком уровне фонового или естественного освещения. Когда уровень фонового или естественного освещения высок, снижение световой мощности может остаться незамеченным.
Преобразователь постоянного тока (DC/DC), установленный между аккумуляторной батареей и определенными потребителями электроэнергии первостепенной важности (или базовыми) (например, радио), может быть включен во время автоматической остановки двигателя для поддержания или минимизации понижения напряжения, которому подвергаются выбранные базовые потребители электроэнергии. Однако устройства освещения транспортного средства могут не относиться к базовым потребителям электроэнергии. Следовательно, для минимизации или предотвращения изменения световой мощности во время старт-стопного выключения и повторного запуска можно использовать дополнительную аккумуляторную батарею или емкостное устройство. В качестве альтернативы, для обеспечения работы устройств освещения транспортного средства и базовых потребителей электроэнергии во время старт-стопного выключения и повторного запуска можно использовать преобразователь постоянного тока большей емкости. Такие схемы, однако, могут увеличить размер и стоимость старт-стопной системы.
Как указано выше, системы освещения транспортного средства могут быть чувствительны к имеющимся проблемам функциональной эффективности вследствие изменения/понижения напряжения во время автоматической остановки. Следовательно, устройства управления генератора переменного тока или встроенного стартера-генератора могут быть использованы для линейного понижения напряжения системы до целевого значения перед отключением двигателя, с целью минимизации наблюдаемых изменений в освещении. Такие параметры, как скорость линейного изменения, продолжительность понижения и целевое значение напряжения, могут быть отрегулированы таким образом, чтобы сбалансировать функциональность, экономию топлива и согласованность с выключениями двигателя.
Испытания в темном помещении показали, что если может быть уменьшена скорость изменения напряжения, подаваемого на осветительные приборы, то наблюдаемое изменение световой мощности менее неприятно. Однако также было установлено, что при определенных условиях (например, при длительном линейном изменении перед выключением двигателя) такое линейное изменение напряжения может оказать неблагоприятное воздействие на экономию топлива, связанную с остановкой/запуском транспортного средства. Линейное изменение напряжения в связи с остановкой/запуском перед выключением двигателя можно минимизировать или исключить при высоком уровне естественного освещения (например, если выключены фары), так что изменение световой мощности может пройти незамеченным. В одном примере выходной сигнал от датчика естественного освещения может использоваться как входные данные для алгоритма линейного изменения либо для изменения скорости понижения напряжения (например, целевое отношение вольты/секунды, использованное для управления линейным понижением напряжения генератора переменного тока или встроенного стартера-генератора) в зависимости от уровня естественного освещения, либо для исключения линейного изменения напряжения, если уровни естественного освещения превышают заданное пороговое значение. Выходной сигнал от датчиков естественного освещения уже может использоваться для автоматического включения фар некоторых транспортных средств. Этот выходной сигнал также может использоваться как входные данные для управления линейным понижением напряжения генератора переменного тока или встроенного стартера-генератора.
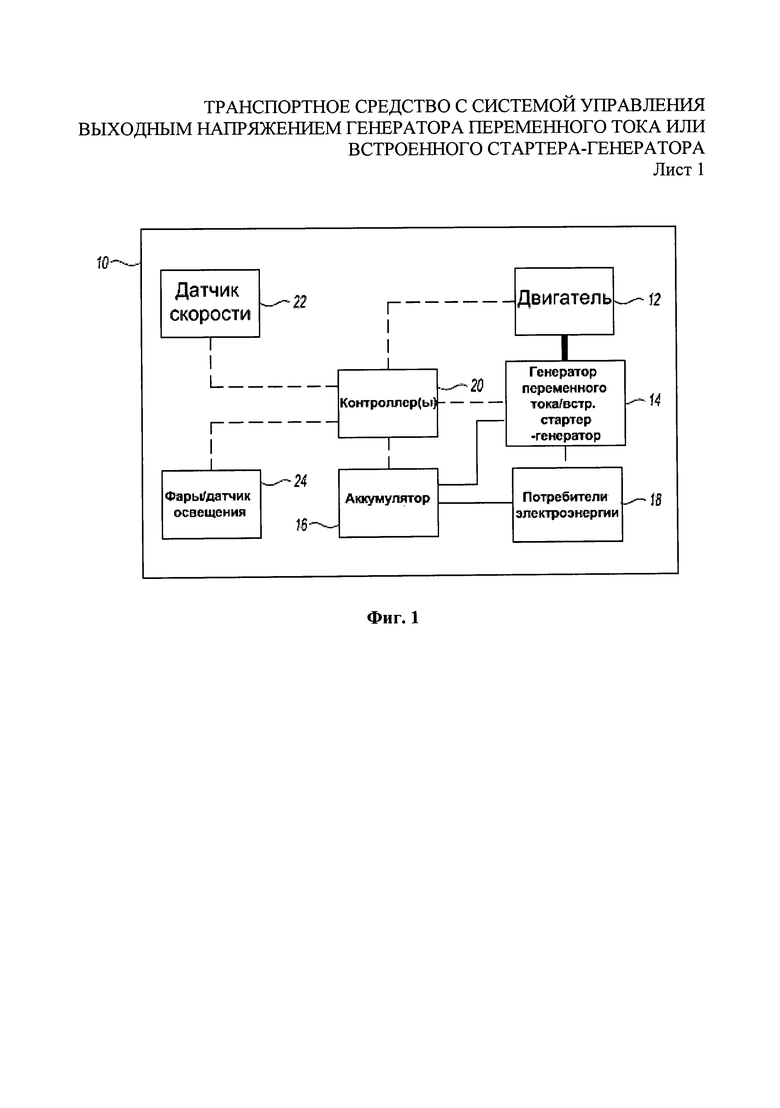
На Фиг.1 транспортное средство 10 может содержать двигатель 12, генератор переменного тока или встроенный стартер-генератор 14, аккумуляторную батарею 16, несколько потребителей 18 электроэнергии (например, система освещения и т.д.) и один или более контроллеров 20. Двигатель 12 вырабатывает двигательную энергию для передвижения транспортного средства 10 и механически приводит в действие генератор переменного тока или встроенный стартер-генератор 14. Генератор переменного тока или встроенный стартер-генератор 14 и аккумуляторная батарея 16 электрически соединены друг с другом и с потребителями 18 электроэнергии. Двигатель 12, генератор переменного тока или встроенный стартер-генератор 14 и аккумуляторная батарея 16 находятся во взаимодействии друг с другом и/или управляются контроллерами 20. Также, разумеется, возможны другие схемы. Например, транспортное средство 10 может дополнительно содержать тяговую батарею и электрическую машину (не показана), установленные таким образом, чтобы селективно вырабатывать двигательную энергию для передвижения транспортного средства 10 и т.д.
Генератор переменного тока или встроенный стартер-генератор 14 вырабатывают электрический ток для зарядки аккумуляторной батареи 16 и для подачи потребителям 18 электроэнергии, когда двигатель 12 работает. Аккумуляторная батарея 16 может обеспечивать подачу электрического тока потребителям 18 электроэнергии при работе двигателя 12. Как объяснялось выше, выходное напряжение генератора переменного тока или встроенного стартера-генератора 14 может быть выше выходного напряжения аккумуляторной батареи 16. Для минимизации случаев возникновения наблюдаемых изменений яркости системы освещения контроллеры 20 могут линейно понижать выходное напряжение генератора переменного тока или встроенного стартера-генератора 14 перед автоматической остановкой двигателя 12. Таким образом, когда осуществляется переход от генератора переменного тока или встроенного стартера-генератора 14 к аккумуляторной батарее 16 в качестве источника электрического тока для подачи питания потребителям 18 электроэнергии, изменение напряжения системы минимизируется.
Для прогнозирования момента, когда может произойти автоматическая остановка двигателя 12, можно использовать различные параметры. В одном примере транспортное средство 10 дополнительно содержит датчик 22 скорости и/или датчик 24 фар и/или естественного освещения. Информация от этих и/или иных датчиков или источников данных может использоваться в качестве входных данных для таблицы соответствия, хранящейся в памяти, связанной с контроллерами 20, и предназначенной для определения порогового значения скорости транспортного средства, ниже которой контроллеры 20 начинают линейно понижать выходное напряжение генератора переменного тока или встроенного стартера-генератора 14 до целевого значения выходного напряжения, предполагая предстоящую автоматическую остановку двигателя (при этом предполагается, что когда скорость транспортного средства 10 становится меньше установленного порогового значения скорости, автоматическая остановка двигателя неизбежна). Такая таблица соответствия может быть создана в ходе испытаний, моделирования или при помощи любой другой подходящей или известной техники. В качестве альтернативы, пороговое значение скорости можно определить расчетным путем на основании входных данных и т.д.
Информация от одного или обоих датчиков 22, 24 и/или других датчиков или источников данных также может использоваться для определения скорости линейного изменения для понижения выходного напряжения, целевого выходного напряжения и/или для предотвращения линейного понижения выходного напряжения генератора переменного тока или встроенного стартера-генератора 14 (из-за потенциального неблагоприятного эффекта такого линейного изменения с точки зрения экономии топлива). Для этих целей можно использовать таблицу соответствия, вычислительные и тому подобные средства.
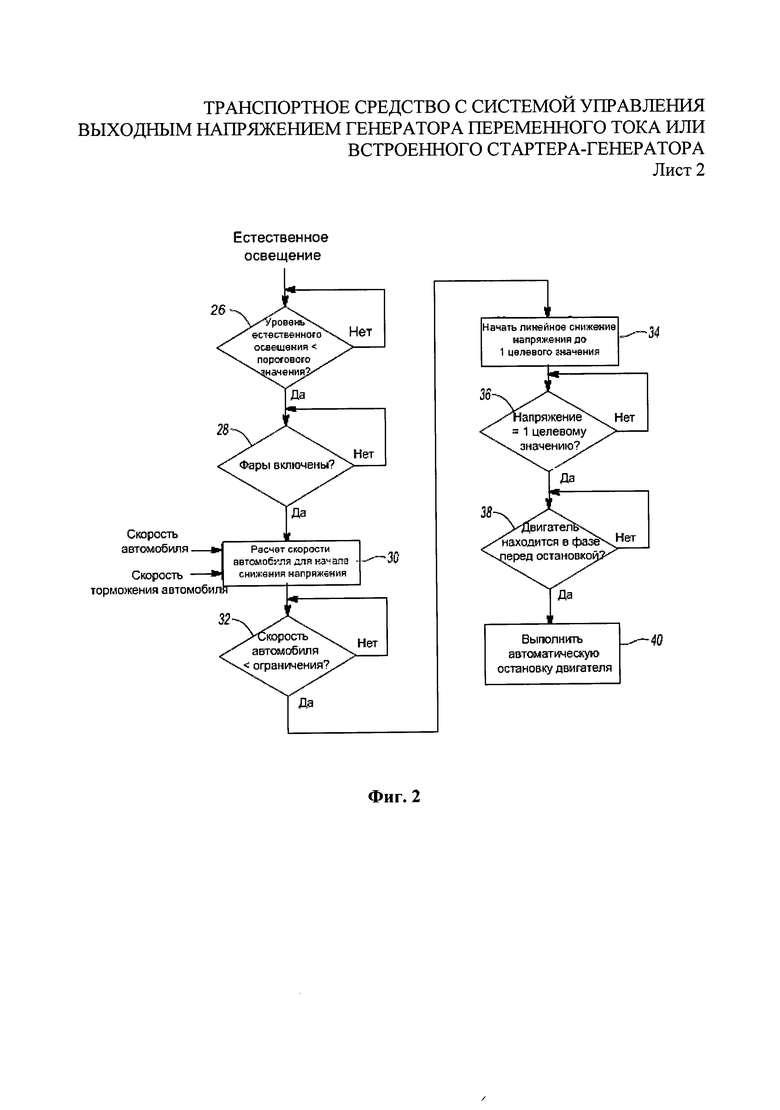
На Фиг.2 алгоритм управления выходным напряжением генератора переменного тока или встроенного стартера-генератора начинается на этапе 26. Здесь определяют, меньше ли уровень естественного освещения заданного порогового значения. Например, контроллеры 20 могут определять, находится ли уровень естественного освещения ниже определенного порогового уровня (установленного, например, по результатам испытаний) на основании информации, полученной от датчика 24. Если нет, тогда алгоритм возвращается к этапу 26. Если да, то на этапе 28 определяют, включены ли фары. Если нет, алгоритм возвращается на этап 28.
Если да, то на этапе 30 определяют пороговое значение скорости для начала линейного понижения выходного напряжения генератора переменного тока или встроенного стартера-генератора. Контроллеры 20, например, могут в качестве входных данных использовать скорость транспортного средства и скорость торможения транспортного средства, а для определения порогового значения скорости транспортного средства использовать таблицу соответствия или подходящую методику вычисления. Другие входные данные могут включать в себя, например, условия дорожного движения (определяемые с помощью навигационной системы) и влажность дороги (определяемую с помощью датчика влажности или на основании сигналов обратной связи от системы регулировки тягового усилия) и т.д. В этом примере при увеличении скорости торможения увеличивается пороговое значение скорости транспортного средства. Аналогичным образом, по мере увеличения скорости транспортного средства увеличивается пороговое значение скорости транспортного средства. Однако подразумевается, что могут существовать также и другие зависимости.
На этапе 32 определяют, меньше ли скорость транспортного средства порогового значения. Контроллеры 20, например, могут сравнивать информацию от датчика 22 с пороговым значением скорости, определенным на этапе 30. Если нет, алгоритм возвращается к этапу 32. Если да, то на этапе 34 инициируют линейное понижение выходного напряжения генератора переменного тока или встроенного стартера-генератора до целевого напряжения. Например, контроллеры 20 могут инициировать понижение выходного напряжения генератора переменного тока направлением генератору 14 переменного тока команды понизить напряжение до заданного значения. Далее может сработать регулятор напряжения генератора 14 переменного тока и соответственно понизить ток возбуждения, связанный с генератором 14 переменного тока.
На этапе 36 определяют, равно ли выходное напряжение генератора переменного тока или встроенного стартера-генератора целевому значению напряжения. Контроллеры 20 могут сравнивать, например, выходное напряжение генератора переменного тока или встроенного стартера-генератора 14 с целевым значением напряжения. Если выходное напряжение не равно целевому значению напряжения, тогда алгоритм возвращается на этап 36. Если значения напряжений равны, на этапе 38 определяют, находится ли двигатель на этапе подготовки к остановке. Например, контроллеры 20 могут определять, равна ли нулю скорость транспортного средства 10, что означает, что двигатель находится на этапе подготовки к остановке. Если нет, алгоритм возвращается на этап 38. Если да, то на этапе 40 инициируют автоматическую остановку двигателя. Контроллеры 20 могут, как известно из уровня техники, направлять команды о подготовке систем транспортного средства к предстоящей остановке двигателя, о прекращении подачи топлива в двигатель 12 и т.д.
В примере на Фиг.2 предполагается, что данные об уровне естественного освещения и состоянии фар используют для определения того, следует ли предотвращать/откладывать линейное понижение выходного напряжения генератора переменного тока или встроенного стартера-генератора. Однако в других примерах данные параметры могут не использоваться таким образом. То есть определенные алгоритмы могут не предусматривать каких-либо мер по предотвращению/задержке линейного понижения выходного напряжения генератора переменного тока или встроенного стартера-генератора. Аналогичным образом, не нужно будет линейно понижать выходное напряжение генератора переменного тока или встроенного стартера-генератора до целевого значения. Наоборот, выходное напряжение генератора переменного тока или встроенного стартера-генератора можно просто понижать до тех пор, пока генератор переменного тока или встроенный стартер-генератор больше не будут источниками тока для потребителей электроэнергии. Однако этот вариант может привести к возникновению периодов ненужной разрядки аккумуляторной батареи после того, как выходное напряжение генератора переменного тока или встроенного стартера-генератора станет меньше или равным выходному напряжению аккумуляторной батареи. Также могут рассматриваться другие варианты.
Следует иметь в виду, что приведенный в качестве примера на Фиг.2 алгоритм не предотвращает автоматических остановок двигателя. Наоборот, алгоритм касается решения о том, следует ли линейно изменять выходное напряжение. Если алгоритм остается на этапе 28, так как, например, фары не горят, контроллеры 20 могут, тем не менее, инициировать автоматическую остановку двигателя, если выполняются условия для автоматической остановки двигателя (например, скорость двигателя приблизительно равна 0 и т.д.). Аналогичным образом, контроллеры 20 могут инициировать автоматическую остановку двигателя, даже если алгоритм остается на этапе 26, когда уровень естественного освещения выше заданного порогового значения.
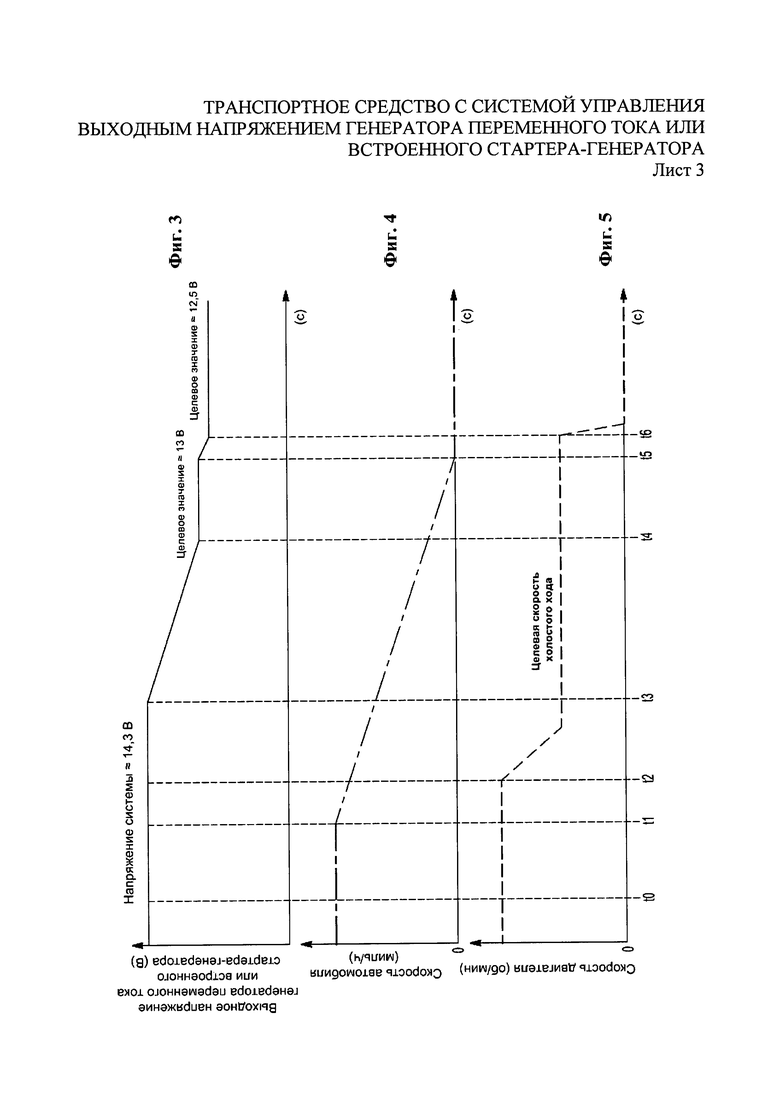
На Фиг.3, 4 и 5 выходное напряжение генератора переменного тока или встроенного стартера-генератора (например, 14,3 В), скорость транспортного средства и частота вращения (скорость) двигателя относительно постоянны, начиная с момента времени t0. В момент t1 скорость транспортного средства начинает снижаться, так как, например, водитель может убрать ногу с педали акселератора и поместить ее на педаль тормоза. В момент t2 скорость двигателя начинает снижаться до своего целевого значения на холостом ходу в ответ на уменьшение скорости транспортного средства. В момент t3 выходное напряжение генератора переменного тока или встроенного стартера-генератора начинает понижаться, так как скорость транспортного средства опускается ниже порогового значения скорости транспортного средства, как было рассмотрено выше. В момент t4 выходное напряжение генератора переменного тока или встроенного стартера-генератора достигает первого целевого напряжения (например, 13 В). В момент t5 выходное напряжение генератора переменного тока или встроенного стартера-генератора начинает понижаться от первого целевого напряжения до второго целевого напряжения (например, 12,5 В), приблизительно равного выходному напряжению аккумуляторной батареи, так как скорость транспортного средства достигла 0. В момент t6 двигатель остановлен.
Промежуток времени между t3 и t4 (например, 2 секунды) и соответствующая первая скорость понижения в этом примере являются фиксированными. Следовательно, промежуток времени между t4 и t5 может меняться в зависимости от порогового значения скорости транспортного средства. Таким образом, промежуток времени между t4 и t5 может увеличиваться при увеличении порогового значения скорости транспортного средства и наоборот. Первая скорость понижения, в этом примере, зафиксирована на значении, которое минимизирует наблюдаемые изменения в световой мощности. Первое целевое значение напряжения выбрано выше выходного напряжения аккумуляторной батареи таким образом, чтобы избежать случаев разрядки батареи в течение периода времени между t4 и t5. В вариантах, где отсутствует целевое значение напряжения, выходное напряжение генератора переменного тока или встроенного стартера-генератора может продолжать понижаться до тех пор, пока оно не станет ниже выходного напряжения аккумуляторной батареи, что приведет к разрядке батареи. В этом примере показано, что промежуток времени между t5 и t6 будет минимальным (например, ½ секунды). Следовательно, соответствующая вторая скорость линейного понижения зафиксирована на значении, которое обеспечивает переход выходного напряжения генератора переменного тока или встроенного стартера-генератора от первого целевого значения ко второму целевому значению в течение этого минимального промежутка времени.
Алгоритмы, раскрытые в данном документе, могут быть реализованы устройствами обработки, такими как контроллеры 20, которые могут включать в себя любой известный электронный блок управления или выделенный электронный блок управления во многих формах, в том числе в виде данных, постоянно хранящихся на запоминающих устройствах без перезаписи, таких как устройства ПЗУ (ROM), и данных, хранящиеся на запоминающих устройствах с перезаписью, таких как гибкие диски, магнитные ленты, компакт-диски, устройства RAM и другие магнитные и оптические носители. Алгоритмы также могут быть реализованы в виде программного объекта. Альтернативно, алгоритмы могут быть реализованы полностью или частично с использованием подходящих аппаратных компонентов, таких как специализированные интегральные микросхемы (ASIC), программируемые логические матрицы типа FPGA, машины состояний и другие аппаратные компоненты и устройства или сочетания аппаратных средств, программного обеспечения и аппаратно-реализованных программных компонентов.
Описанные выше примеры не охватывают все возможные варианты осуществления изобретения. Данное описание имеет скорее иллюстративный, чем ограничивающий характер. При этом без выхода за рамки сущности и объема изобретения могут быть произведены различные модификации описанных вариантов. Кроме того, различные варианты осуществления изобретения могут быть объединены в новые варианты воплощения изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОСНОВАННЫЙ НА ЭЛЕКТРИЧЕСКОМ ТОКЕ АЛГОРИТМ БЛОКИРОВКИ АВТОМАТИЧЕСКОЙ ОСТАНОВКИ ДВИГАТЕЛЯ И СИСТЕМА, ЕГО ОСУЩЕСТВЛЯЮЩАЯ | 2012 |
|
RU2613185C2 |
| ОБЪЕДИНЕНИЕ АВТОМАТИЧЕСКОГО ПУСКА-ОСТАНОВА И АКТИВНОГО РУЛЕВОГО УПРАВЛЕНИЯ | 2016 |
|
RU2708964C2 |
| СПОСОБ ДЛЯ УПРАВЛЕНИЯ ИСТОЧНИКОМ ЭЛЕКТРИЧЕСКОГО ТОКА В МОТОРНОМ ТРАНСПОРТНОМ СРЕДСТВЕ | 2015 |
|
RU2674754C2 |
| РЕГУЛИРОВАНИЕ ЗАРЯДКИ ОТ ГЕНЕРАТОРА С УЧЕТОМ ДОБАВОЧНОГО РАСХОДА ТОПЛИВА | 2017 |
|
RU2692862C2 |
| СИСТЕМА ЭЛЕКТРОСТАРТЕРНОГО ПУСКА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2012 |
|
RU2502889C1 |
| СПОСОБ УПРАВЛЕНИЯ ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2014 |
|
RU2676923C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ МОТОРНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2668884C2 |
| СПОСОБ ПОДАЧИ ПИТАНИЯ НА СИСТЕМУ ЭЛЕКТРОУСИЛИТЕЛЯ РУЛЯ | 2012 |
|
RU2577809C2 |
| ВСПОМОГАТЕЛЬНАЯ СИЛОВАЯ УСТАНОВКА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2732522C2 |
| СПОСОБ РАБОТЫ ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ (ВАРИАНТЫ) | 2014 |
|
RU2581993C2 |
Изобретение относится к области транспортного средства, в частности микрогибридное транспортное средство, содержащее двигатель, генератор переменного тока или встроенный стартер-генератор и по меньшей мере один контроллер, который понижает выходное напряжение генератора переменного тока или встроенного стартера-генератора перед началом автоматической остановки двигателя. 4 з.п. ф-лы, 5 ил.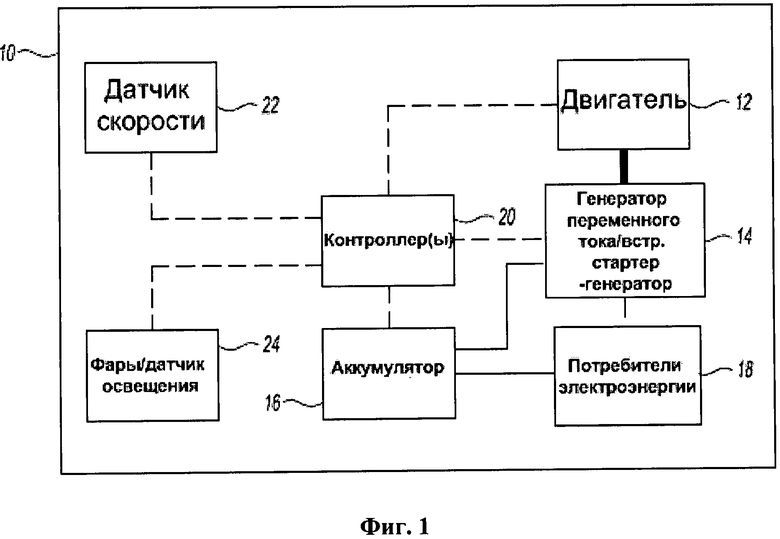
1. Механическое транспортное средство, содержащее:
двигатель;
генератор переменного тока или встроенный стартер-генератор; и
по меньшей мере один контроллер, выполненный с возможностью понижать выходное напряжение генератора переменного тока или встроенного стартера-генератора перед инициированием автоматической остановки двигателя в ответ на то, что уровень окружающего освещения меньше порогового уровня окружающего освещения, и, что скорость транспортного средства меньше пороговой скорости транспортного средства.
2. Транспортное средство по п. 1, в котором по меньшей мере один контроллер дополнительно выполнен с возможностью понижать выходное напряжение до целевого напряжения перед инициированием автоматической остановки двигателя.
3. Транспортное средство по п. 2, дополнительно содержащее батарею, при этом целевое напряжение выше выходного напряжения упомянутой батареи.
4. Транспортное средство по п. 3, в котором по меньшей мере один контроллер дополнительно выполнен с возможностью понижать выходное напряжение генератора переменного тока или встроенного стартер-генератора от упомянутого целевого напряжения до другого целевого напряжения, приблизительно равного выходному напряжению батареи, когда скорость транспортного средства приблизительно равна нулю.
5. Транспортное средство по п. 1, в котором по меньшей мере один контроллер дополнительно выполнен с возможностью определять пороговое значение скорости транспортного средства на основе скорости транспортного средства.
| JP 2006183546 A, 13.07.2006 | |||
| US 4825139 A, 25.05.1989 | |||
| JP 2002369403 A), 20.12.2002 | |||
| US 6049171 A, 11.04.2000 | |||
| RU 2009132617 A, 11.03.2011. |

