Область техники, к которой относится изобретение
Настоящее изобретение относится к способам определения необходимости блокировки автоматической остановки двигателя на основании оценочных величин требуемого электрического тока для электрических нагрузок.
Уровень техники
Микрогибридное транспортное средство может останавливать работу двигателя внутреннего сгорания на промежуток времени во время интервалов цикла вождения, когда скорость транспортного средства приближается или равна нулю. Такие автоматические остановки двигателя могут снизить расход топлива за счет сокращения времени холостого хода двигателя (и потребления топлива) для цикла вождения.
Раскрытие изобретения
В связи с этим было разработано транспортное средство (автомобиль), которое содержит двигатель и по меньшей мере один контроллер. По меньшей мере один контроллер может быть запрограммирован таким образом, чтобы периодически определять оценочный ток, который будет затребован электрическими нагрузками транспортного средства во время автоматической остановки двигателя для того, чтобы сравнить оценочный ток с пороговым значением и заблокировать автоматическую остановку двигателя, если оценочный ток больше порогового значения для заданного периода времени.
Транспортное средство может содержать двигатель и по меньшей мере один контроллер, выполненный с возможностью обнаруживать условия для блокировки автоматической остановки двигателя, когда оценочная величина тока, который должен потребляться во время автоматической остановки, превышает пороговое значение. При обнаружении условия для блокировки автоматической остановки двигателя по меньшей мере один контроллер может предотвратить автоматическую остановку двигателя.
Представлен также способ управления двигателем транспортного средства, который может включать в себя определение оценочного тока, который будет затребован электрическими нагрузками транспортного средства во время автоматической остановки двигателя, сравнение оценочного тока с пороговым значением, блокировку автоматической остановки двигателя, если оценочный ток превышает пороговое значение, и разрешение автоматической остановки двигателя, если оценочный ток меньше порогового.
Краткое описание чертежей
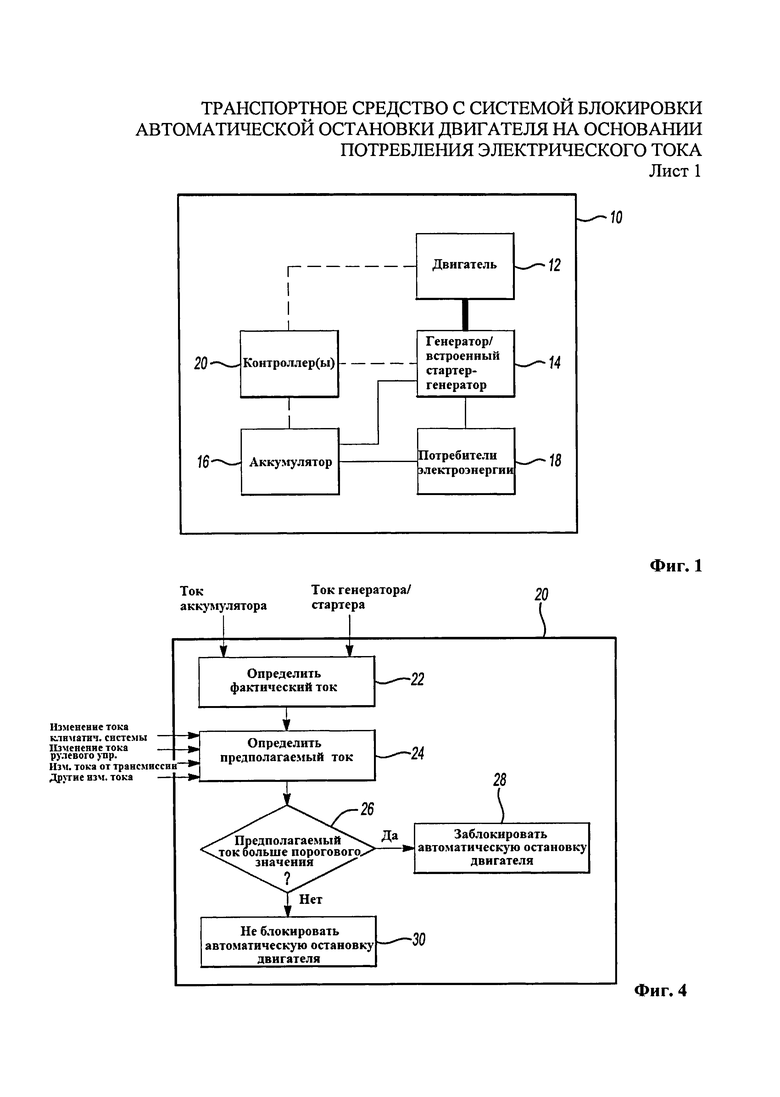
Фиг. 1 представляет собой принципиальную схему микрогибридного транспортного средства.
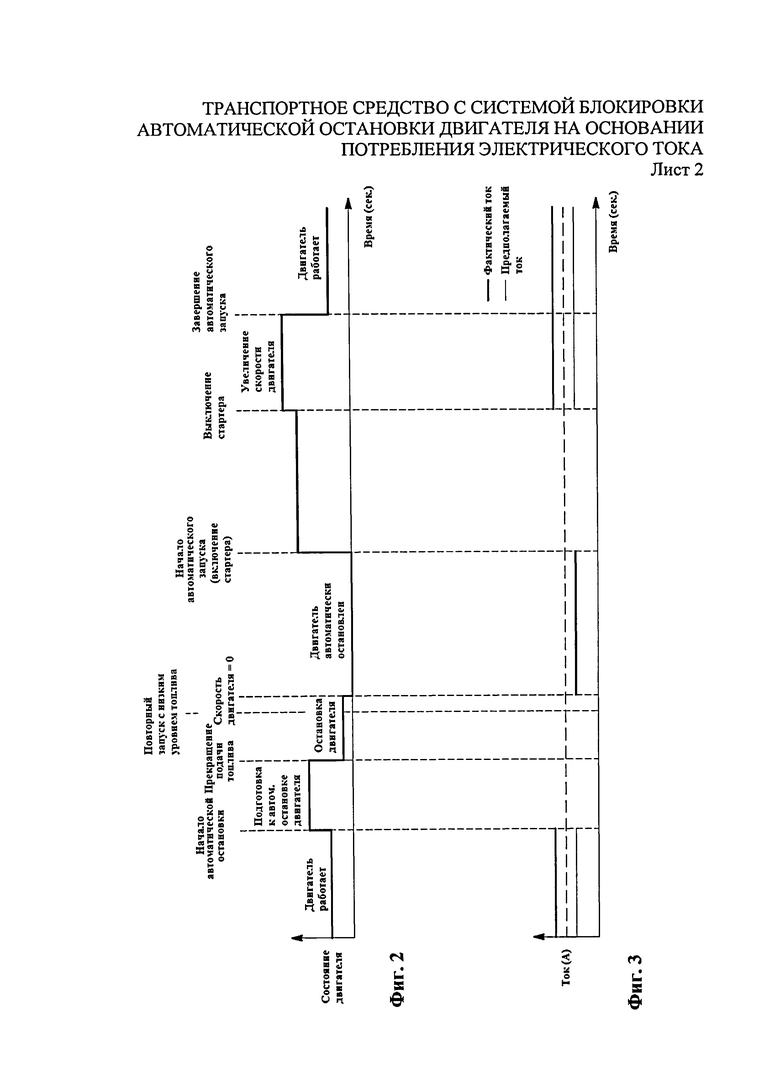
Фиг. 2 представляет собой график, иллюстрирующий зависимость состояния двигателя от времени до, во время и после факта автоматической остановки/запуска.
Фиг. 3 представляет собой график, иллюстрирующий фактический и оценочный (предполагаемый) ток системы, связанные с графиком на Фиг. 2.
Фиг. 4 представляет собой блок-схему алгоритма определения необходимости блокировки автоматической остановки двигателя.
Осуществление изобретения
Далее подробно описаны способы воплощения настоящего изобретения; однако следует понимать, что представленные здесь варианты осуществления изобретения являются лишь примерами изобретения, которые могут быть реализованы в различных альтернативных вариантах. На чертежах не всегда соблюдены реальные размеры, некоторые элементы могут быть увеличены или уменьшены с целью демонстрации деталей определенных составных частей. Таким образом, специфические структурные и функциональные детали, раскрытые в настоящем изобретении, следует рассматривать не в качестве ограничения, а в качестве иллюстративной части для изучения специалистами в данной области техники с целью различного применения настоящего изобретения.
На Фиг. 1 микрогибридное транспортное средство 10 может содержать двигатель 12, генератор переменного тока или встроенный стартер-генератор 14, аккумуляторную батарею 16 (например, батарею на 12 В), электрические нагрузки 18 (например, насосы системы климат-контроля, электроусилитель рулевого управления и т.д.), соединенные/управляемые одним или несколькими контроллерами 20 (как показано пунктирной линией). Двигатель 12 механически соединен с генератором переменного тока или встроенным стартером-генератором 14 (как показано жирной линией) так, чтобы двигатель 12 мог привести в действие генератор переменного тока или встроенный стартер-генератор 14 для выработки им электрического тока. Генератор переменного тока или встроенный стартер-генератор 14 и аккумуляторная батарея 16 электрически соединены друг с другом и электрическими нагрузками 18 (как показано тонкой линией). Следовательно, генератор или встроенный стартер-генератор 14 могут заряжать аккумуляторную батарею 16; электрические нагрузки 18 могут использовать электрический ток, вырабатываемый генератором или встроенным генератором-стартером 14 и/или аккумуляторной батареей 16.
Контроллеры 20 могут инициировать автоматическую остановку или автоматический запуск двигателя 12. Например, когда транспортное средство 10 останавливается, контроллеры 20 могут подавать команду начать остановку двигателя 12, таким образом предотвращая подачу питания от генератора переменного тока или встроенного генератора- стартера 14 электрическим нагрузкам 18. Аккумуляторная батарея 16 может обеспечивать подачу электрического тока электрическим нагрузкам 18, когда двигатель 12 остановлен. Когда педаль тормоза (не показана) отпущена (и/или педаль акселератора (не показана) нажата) после автоматической остановки двигателя, контроллеры 20 могут подавать команду начать запуск двигателя 12, таким образом позволяя генератору или встроенному генератору-стартеру 14 подавать ток электрическим нагрузкам 18.
Со ссылкой на Фиг. 2, автоматическая остановка двигателя может включать в себя несколько этапов: «начало автоматической остановки», обозначающий начало автоматической остановки двигателя; «подготовка к автоматической остановке двигателя», обозначающий период, во время которого производится подготовка систем автомобиля и двигателя к предстоящей автоматической остановке (если на данном этапе обнаружено условие, препятствующее автоматической остановке, подготовка к автоматической остановке двигателя прерывается, системы автомобиля и двигатель возвращаются к их обычным режимам работы); «прекращение подачи топлива», обозначающий момент времени, когда подача топлива в двигатель прекращается; «остановка двигателя», обозначающий период, во время которого частота вращения (скорость) двигателя снижается до нуля; «повторный запуск с низким уровнем топлива», обозначающий момент времени, после которого требуется повторный запуск для блокировки автоматической остановки во время этапа «остановка двигателя», для запуска двигателя может потребоваться стартер (если повторный запуск требуется до этапа «повторный запуск с низким уровнем топлива» и во время этапа «остановка двигателя», двигатель может быть повторно запущен путем увеличения подачи топлива); «скорость вращения двигателя = 0», обозначающий момент времени, при котором скорость вращения двигателя около или равна нулю; «двигатель автоматически остановлен», обозначающий период времени, когда двигатель выключен; «включение стартера», обозначающий момент времени, при котором стартер начинает проворачивать двигатель с целью запуска двигателя (при обнаружении условия автоматического запуска двигателя); «стартер проворачивает двигатель», обозначающий период времени, во время которого двигатель не может запускаться самостоятельно; «выключение стартера», обозначающий момент времени, при котором двигатель способен вращаться самостоятельно; «увеличение скорости вращения двигателя», обозначающий период, во время которого частота вращения двигателя возрастает до его рабочей частоты; «окончание автоматического запуска», обозначающий момент времени, когда частота вращения двигателя достигает своей рабочей частоты (частота при необходимом числе оборотов холостого хода или выше него); и «завершение автоматического запуска», т.е. момент времени, когда частота вращения двигателя достигает своей рабочей частоты.
Со ссылкой на Фиг. 1, электрические нагрузки 18 могут работать при остановленном двигателе 12 во время остановки/запуска двигателя. Например, насосы, связанные с системой климат-контроля, могут в это время функционировать. Следовательно, для подачи питания таким потребителям может потребоваться аккумуляторная батарея 16. Потребление тока электрическими нагрузками 18 во время остановки/запуска двигателя, тем не менее, может превышать рекомендуемую емкость аккумуляторной батареи 16. То есть напряжение аккумуляторной батареи 16 может упасть ниже рекомендуемого предела при подаче питания электрическим нагрузкам 18 во время остановки/запуска двигателя. Для предотвращения данной ситуации контроллеры 20 могут определять уровень тока, необходимый электрическим нагрузкам 18, и сравнивать его с заданным пороговым значением. Например, величина тока, вырабатываемого генератором переменного тока или встроенным генератором-стартером 14 и величина тока, вырабатываемого аккумуляторной батареей 16, могут суммироваться для определения общего тока, необходимого электрическим нагрузкам 18. Если общий ток потребления превышает заданное пороговое значение, контроллеры 20 могут блокировать любую попытку автоматической остановки двигателя 12. Заданное пороговое значение может быть определено путем тестирования, моделирования и т.д. и выбрано так, чтобы исключить падение напряжения аккумуляторной батареи 16 ниже желаемого уровня.
Ток, необходимый некоторым электрическим нагрузкам 18, может зависеть от того, работает двигатель 12, или нет. Например, потребление тока вентилятором охлаждения двигателя или топливным насосом может снизиться до нуля при остановленном двигателе 12 во время остановки/запуска двигателя. Аналогично, потребление тока насосами, связанными с системой климат-контроля, может быть снижено при остановленном двигателе 12 во время остановки/запуска двигателя. Потребление тока другими подсистемами, тем не менее, при остановленном двигателе 12 во время остановки/запуска двигателя может увеличиться. Следовательно, величина полного тока, необходимая электрическим нагрузкам 18, может либо понижаться, либо повышаться после того, как двигатель 12 автоматически остановлен.
Блокирование автоматической остановки двигателя, основанное на фактических значениях тока, вырабатываемого генератором переменного тока или встроенным генератором-стартером 14 и аккумуляторной батареей до остановки/запуска двигателя, может привести к слишком редким автоматическим остановкам двигателя и менее чем оптимальной экономии топлива, поскольку значение тока, используемого электрическими нагрузками 18, может снизиться после того, как двигатель 12 автоматически остановлен. Следовательно, оценочные величины изменения значения тока, необходимого для электрических нагрузок 18 при остановке/запуске двигателя, могут быть использованы для принятия решения о необходимости блокирования автоматической остановки двигателя. Это значит, что изменение значения тока, необходимого для электрических нагрузок 18 при остановке/запуске двигателя, обусловленное остановкой двигателя 12, может быть вычислено путем тестирования, моделирования и т.д. и сделано доступным для контроллеров 20 так, что решение о блокировании автоматической остановки двигателя 12 может быть основано на оценочной величине тока, необходимого для электрических нагрузок 18 при остановленном двигателе 12.
Со ссылкой на Фиг. 3, фактический ток системы и оценочный ток системы могут измеряться непрерывно/периодически до автоматической остановки двигателя. Например, фактический или полный ток системы (как показано жирной линией) может быть определен путем суммирования тока, вырабатываемого генератором переменного тока или встроенным генератором-стартером 14, и тока, вырабатываемого аккумуляторной батареей 16. Оценочный ток системы (как показано тонкой линией) может быть вычислен путем вычитания (или сложения) ожидаемой величины снижения (или повышения) потреблений тока, связанных с автоматической остановкой двигателя, из фактического тока системы. Данные об ожидаемом снижении (или повышении) потребления тока, связанного с автоматической остановкой двигателя, могут храниться в памяти и быть доступными при необходимости, или обнаруживаться, например, датчиками тока. Оценочный ток системы можно затем сравнить с пороговым значением тока (как показано пунктирной линией). Если оценочный ток системы превышает пороговое значение, любая попытка начать автоматическую остановку двигателя может быть заблокирована (будет предотвращаться автоматическая остановка двигателя). Если оценочный ток системы меньше порогового значения, любая попытка начать автоматическую остановку двигателя может не быть заблокирована (двигателю может быть позволено автоматически остановиться). Например, после выполнения вышеупомянутого сравнения может быть установлен флаг блокировки автоматической остановки двигателя (сигнальный индикатор). Такой флаг может быть установлен на ноль, когда оценочный ток системы меньше порогового значения тока, и может быть установлен на единицу, когда оценочный ток системы превышает пороговое значение. Данный флаг может затем проверяться в стандартном алгоритме определения необходимости автоматической остановки двигателя.
В других примерах может потребоваться, чтобы оценочный ток системы был меньше порогового значения в течение некоторого заданного периода времени (например, 3 секунды) до разрешения начала автоматической остановки двигателя. Аналогично может потребоваться, чтобы оценочный ток системы превышал пороговое значение в течение некоторого заданного периода времени до блокировки начала автоматической остановки двигателя. Такие способы могут быть применены для того, чтобы свести к минимуму влияние, которое оказывают неустойчивые изменения значения тока на решение о необходимости блокирования автоматических остановок двигателя. Также возможны другие сценарии.
Предполагая, что оценочный ток системы меньше порогового значения тока, определение оценочного тока системы может быть отложено, как только была начата автоматическая остановка двигателя. Ток системы может подвергаться неустойчивым изменениям, так как различные подсистемы транспортного средства подготавливаются к остановке двигателя. Такие изменения значения тока могут снизить точность определения оценочного тока системы. Значение оценочного тока системы, определенное непосредственно перед началом остановки двигателя, может, таким образом, поддерживаться на одном уровне, пока скорость вращения двигателя не будет равна нулю.
Когда скорость вращения двигателя становится равной нулю, можно снова непрерывно/периодически определять фактический ток системы. Электрические нагрузки, работающие во время автоматической остановки двигателя, в примере на Фиг. 3, управляются так, их потребления тока соответствуют оцененным до начала автоматической остановки двигателя. Таким образом, вентилятор охлаждения двигателя, для которого снижение рабочего тока экспериментально оценено в 0,3 А, во время автоматической остановки двигателя, будет управляться таким образом, что его рабочий ток действительно будет уменьшен на 0,3 А во время автоматической остановки двигателя и т.д. Данная схема управления может работать до момента обнаружения условия для автоматического запуска двигателя (например, водитель нажимает на педаль акселератора, фактический ток системы превышает пороговое значение в течение некоторого заданного периода времени и т.д.). Фактический ток системы может возрасти при запуске двигателя стартером. В некоторых случаях, например, в примере, показанном на Фиг. 3, измерение фактического тока системы прекращают, когда стартер проворачивает двигатель, поскольку стартеру требуется определенное количество тока. Когда двигатель работает самостоятельно, определение фактического и оценочного тока может быть продолжено, как описано выше.
Со ссылкой на Фиг. 4, фактическое значение тока может быть измерено на этапе 22. Например, контроллеры 20 могут считывать данные о токе аккумуляторной батареи и токе генератора переменного тока или встроенного генератора-стартера, доступные из локальной сети контроллера. Значения, связанные с этими данными, могут быть суммированы для вычисления фактического тока. На этапе 24 может быть определен оценочный ток. Контроллеры 20, например, могут считывать данные об уменьшении (или увеличении) тока, которое будет происходить в климатической системе, системе рулевого управления и/или силовой передаче и т.д. во время остановки двигателя, и вычитать эти данные из фактического тока (или прибавлять эти данные к фактическому току) для вычисления оценочного тока. На этапе 26 определяется, превышает ли оценочный ток пороговое значение. Контроллеры 20, например, могут сравнивать оценочный ток с пороговым значением. При выполнении условия для блокирования автоматической остановки автоматическая остановка двигателя может быть заблокирована на этапе 28. Например, контроллеры 20 могут заблокировать автоматическую остановку двигателя 12. При отсутствии условия для разрешения автоматической остановки автоматическая остановка двигателя может быть разрешена на этапе 30. Например, контроллеры 20 могут разрешить автоматическую остановку двигателя 12.
Алгоритмы, раскрытые в данном документе, могут быть реализованы устройствами обработки, такими как контроллеры 20, которые могут включать в себя любой известный электронный блок управления или выделенный электронный блок управления во многих формах, в том числе в виде данных, постоянно хранящихся на запоминающих устройствах без перезаписи, таких как устройства ПЗУ (ROM), и данных, хранящиеся на запоминающих устройствах с перезаписью, таких как гибкие диски, магнитные ленты, компакт-диски, устройства RAM и другие магнитные и оптические носители. Алгоритмы также могут быть реализованы в виде программного объекта. Альтернативно, алгоритмы могут быть реализованы полностью или частично с использованием подходящих аппаратных компонентов, таких как специализированные интегральные микросхемы (ASIC), логическая матрица, программируемая пользователем (ППВМ), конечные автоматы, контроллеры и другие аппаратные компоненты и устройства или сочетания аппаратных средств, программного обеспечения и аппаратно- реализованных программных компонентов.
Описанные выше примеры не охватывают все возможные варианты осуществления изобретения. Данное описание имеет скорее иллюстративный, чем ограничивающий характер. При этом без выхода за рамки сущности и объема изобретения могут быть произведены различные модификации описанных вариантов. Кроме того, различные варианты осуществления изобретения могут быть объединены в новые варианты воплощения изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО С СИСТЕМОЙ УПРАВЛЕНИЯ ВЫХОДНЫМ НАПРЯЖЕНИЕМ ГЕНЕРАТОРА ПЕРЕМЕННОГО ТОКА ИЛИ ВСТРОЕННОГО СТАРТЕРА-ГЕНЕРАТОРА | 2012 |
|
RU2611728C2 |
| СПОСОБ УПРАВЛЕНИЯ ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2014 |
|
RU2676923C2 |
| СПОСОБ ПОДАЧИ ПИТАНИЯ НА СИСТЕМУ ЭЛЕКТРОУСИЛИТЕЛЯ РУЛЯ | 2012 |
|
RU2577809C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ МОТОРНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2668884C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОСТАНОВКИ И АВТОМАТИЧЕСКОГО ЗАПУСКА ДВИГАТЕЛЯ | 2012 |
|
RU2576642C2 |
| СИСТЕМА И СПОСОБ ПРИМЕНЕНИЯ АКТИВНОГО МЕХАНИЗМА НАТЯЖЕНИЯ РЕМНЯ ВСТРОЕННОГО СТАРТЕРА-ГЕНЕРАТОРА С РЕМЕННОЙ ПЕРЕДАЧЕЙ | 2018 |
|
RU2688613C1 |
| ОРГАНИЗАЦИЯ ЭЛЕКТРОПИТАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2690298C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОУСИЛИТЕЛЕМ РУЛЕВОГО УПРАВЛЕНИЯ | 2012 |
|
RU2606354C2 |
| СИСТЕМА ПОДАЧИ МОЩНОСТИ | 2015 |
|
RU2668491C1 |
| СПОСОБ ЗАПУСКА ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ЗАПУСКА ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ | 2013 |
|
RU2606160C2 |
Изобретение относится к автомобилям со стартстопной системой. Транспортное средство содержит двигатель и контроллер, который обнаруживает условие для блокировки автоматической остановки двигателя, когда оценочная величина тока, который будет затребован электрическими нагрузками транспортного средства, включающими в себя систему климат-контроля, во время автоматической остановки двигателя, превышает пороговое значение тока. В ответ на обнаружение условия для блокировки автоматической остановки двигателя контроллер предотвращает автоматическую остановку двигателя. Повышается комфорт управления. 3 з.п. ф-лы, 4 ил.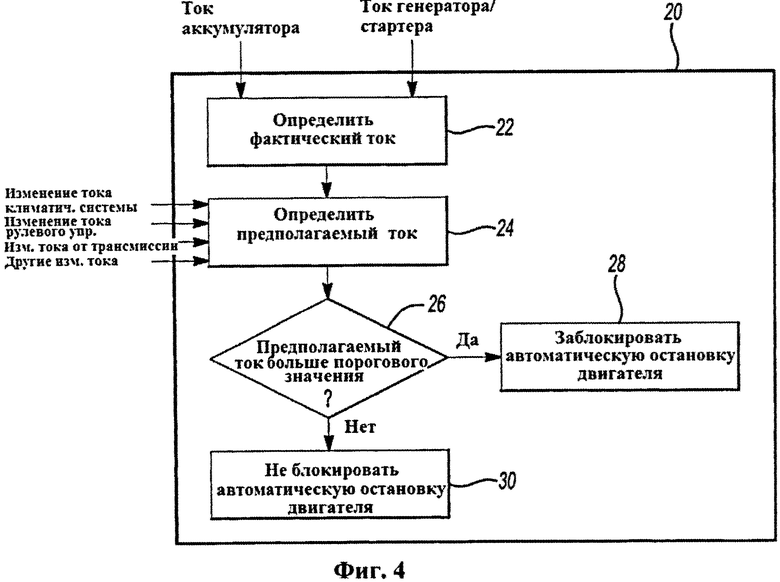
1. Транспортное средство, содержащее
двигатель; и
по меньшей мере один контроллер, выполненный с возможностью обнаруживать условие для блокировки автоматической остановки двигателя, когда оценочная величина тока, который будет затребован электрическими нагрузками транспортного средства, включающими в себя систему климат-контроля, во время автоматической остановки двигателя, превышает пороговое значение тока, и, в ответ на обнаружение условия для блокировки автоматической остановки двигателя, предотвращать двигатель от автоматической остановки.
2. Транспортное средство по п. 1, дополнительно содержащее
(i) аккумуляторную батарею и
(ii) генератор переменного тока или встроенный генератор-стартер,
причем по меньшей мере один контроллер дополнительно выполнен с возможностью определять полный ток, вырабатываемый (i) аккумуляторной батареей и (ii) генератором переменного тока или встроенным генератором-стартером, и причем по меньшей мере один контроллер дополнительно выполнен с возможностью определять оценочную величину тока, который будет затребован электрическими нагрузками транспортного средства во время автоматической остановки двигателя, на основании разницы между полным током и ожидаемым изменением тока, затребованного электрическими нагрузками транспортного средства во время автоматической остановки двигателя.
3. Транспортное средство по п. 2, в котором по меньшей мере один контроллер дополнительно выполнен с возможностью определять оценочную величину тока до начала автоматической остановки двигателя.
4. Транспортное средство по п. 1, в котором по меньшей мере один контроллер дополнительно выполнен с возможностью обнаруживать условие для разрешения автоматической остановки двигателя, когда оценочная величина тока, который будет затребован электрическими нагрузками транспортного средства во время автоматической остановки двигателя, меньше порогового значения тока, и, в ответ на обнаружение условия разрешения автоматической остановки двигателя, допускать автоматическую остановку двигателя.
| JP 2001173480 A, 26.06.2001 | |||
| US 6624529 B2, 23.09.2003 | |||
| US 2007170778 A1, 26.07.2007 | |||
| US 6564765 B2, 20.05.2003 | |||
| US 6570266 B1, 27.05.2003. |

