ОБЛАСТЬ ТЕХНИКИ
Эта заявка в целом относится к объединению систем автоматического пуска-останова двигателя и активного рулевого управления в транспортном средстве.
УРОВЕНЬ ТЕХНИКИ
Транспортное средство с микрогибридным приводом или автоматическим пуском/остановом могут избирательно выключать свой двигатель в течение частей ездового цикла, чтобы сберегать топливо. В качестве примера, транспортное средство с автоматическим пуском/остановом могут выключать свой двигатель, в то время как транспортное средство остановлено, вместо того, чтобы предоставлять двигателю возможность работать на холостом ходу. Двигатель затем может перезапускаться, например, когда водитель нажимает ногой на педаль акселератор. Транспортное средство с автоматическим пуском/остановом также может включать в себя систему активного рулевого управления, которая меняет передаточное отношение, с которым колеса поворачиваются в ответ на поворачивание рулевого колеса.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Система активного рулевого управления включает в себя электрический привод, присоединенный к рулевому механизму, и по меньшей мере один контроллер. По меньшей мере один контроллер запрограммирован, в ответ на запрос изменить передаточное отношение рулевого механизма на величину, которая дает в результате запрошенный ток электрического привода, являющийся большим, чем предопределенный ток, при наличии входного сигнала, указывающего событие автоматического останова двигателя, эксплуатировать электрический привод на предопределенном токе. По меньшей мере один контроллер дополнительно может быть запрограммирован, в ответ на запрос изменить передаточное отношение рулевого механизма на величину, которая дает в результате запрошенный ток электрического привода, являющийся большим, чем предопределенный ток, при наличии входного сигнала, указывающего работающий двигатель, эксплуатировать электрический привод на запрошенном токе. Система активного рулевого управления дополнительно может содержать механизм блокировки, взаимодействующий с электрическим приводом, и по меньшей мере один контроллер может быть дополнительно запрограммирован, в ответ на входной сигнал, указывающий событие автоматического останова двигателя, эксплуатировать механизм блокировки в заблокированном режиме, чтобы предотвращать оказание влияния электрического привода на работу рулевого механизма. Предопределенный ток может убывать в направлении предельного тока в ответ на входной сигнал, указывающий подготовку к автоматическому останову двигателя. Предопределенный ток может возрастать в направлении запрошенного тока в ответ на входной сигнал, указывающий повышение числа оборотов двигателя. По меньшей мере один контроллер может быть дополнительно запрограммирован, в ответ на запрос изменить передаточное отношение рулевого механизма на величину, которая дает в результате запрошенный ток электрического привода, являющийся большим, чем предопределенный ток, и входной сигнал, указывающий отсутствие выработки электрической мощности для поддержки электрического привода, эксплуатировать электрический привод на предопределенном токе. Электрический привод может быть электродвигателем.
Транспортное средство включает в себя двигатель, выполненный с возможностью осуществлять автоматический останов и автоматический пуск, систему активного рулевого управления, включающую в себя электрический привод, и по меньшей мере один контроллер. По меньшей мере один контроллер запрограммирован, в ответ на запрос изменить передаточное отношение рулевого механизма на величину, которая дает в результате запрошенный ток электрического привода, являющийся большим, чем предопределенный ток, во время события автоматического останова двигателя, эксплуатировать электрический привод на предопределенном токе. Предопределенный ток может уменьшаться до предопределенного предельного тока до того, как перекрыто топливо в двигатель. По меньшей мере один контроллер дополнительно может быть запрограммирован, в ответ на запрос изменить передаточное отношение рулевого механизма на величину, которая дает в результате запрошенный ток электрического привода, являющийся большим, чем предопределенный ток, в то время как двигатель является работающим, эксплуатировать электрический привод на запрошенном токе. Предопределенный ток может возрастать в ответ на выдачу топлива в двигатель. Транспортное средство дополнительно может включать в себя электрическую машину, присоединенную к двигателю, и по меньшей мере один контроллер может быть дополнительно запрограммирован, в ответ на электрическую машину, работающую в качестве генератора и вырабатывающую ток, по меньшей мере равный запрошенному току, эксплуатировать электрический привод на запрошенном токе. Система активного рулевого управления дополнительно может включать себя механизм блокировки, взаимодействующий с электрическим приводом, и по меньшей мере один контроллер дополнительно может быть запрограммирован приводить в действие механизм блокировки для эксплуатации системы активного рулевого управления в заблокированном режиме во время события автоматического останова двигателя. Предопределенный ток может линейно понижаться до предопределенного предельного тока после перехода на событие автоматического останова двигателя. Предопределенный ток может линейно повышаться до запрошенного тока после перехода из события автоматического останова двигателя.
Способ включает в себя прием, посредством контроллера, входного сигнала, указывающего состояние системы автоматического пуска-останова двигателя. Способ дополнительно включает в себя запрашивание, посредством контроллера, требуемого тока для приведения в действие электрического привода, чтобы добиваться передаточного отношения рулевого механизма, которое основано на запросе рулевого управления. Способ дополнительно включает в себя эксплуатацию, посредством контроллера, электрического привода на предельном токе, который является меньшим, чем требуемый ток, в ответ на состояние, указывающее событие автоматического останова двигателя. Способ дополнительно может включать в себя повышение, посредством контроллера, предельного тока до требуемого тока через предопределенный временной интервал в ответ на состояние, указывающее, что число оборотов двигателя является возрастающим. Способ дополнительно может включать в себя эксплуатацию, посредством контроллера, электрического привода на требуемом токе в ответ на состояние, указывающее состояние работающего двигателя. Способ дополнительно может включать в себя понижение, посредством контроллера, предельного тока до минимального предела через предопределенный временной интервал в ответ на состояние, указывающее подготовку к автоматическому останову двигателя. Способ дополнительно может включать в себя вывод, посредством контроллера, индикатора состояния, когда электрический привод эксплуатируется на предельном токе.
В настоящей заявке предлагается система активного рулевого управления, содержащая электрический привод, присоединенный к рулевому механизму; и по меньшей мере один контроллер, запрограммированный, в ответ на запрос изменить передаточное отношение рулевого механизма на величину, которая дает в результате запрошенный ток электрического привода, являющийся большим, чем предопределенный ток, при наличии входного сигнала, указывающего событие автоматического останова двигателя, эксплуатировать электрический привод на предопределенном токе. При чем по меньшей мере один контроллер дополнительно запрограммирован, в ответ на запрос изменить передаточное отношение рулевого механизма на величину, которая дает в результате запрошенный ток электрического привода, являющийся большим, чем предопределенный ток, при наличии входного сигнала, указывающего работающий двигатель, эксплуатировать электрический привод на запрошенном токе. Причем систем дополнительно содержит механизм блокировки, взаимодействующий с электрическим приводом, и при этом, по меньшей мере один контроллер дополнительно запрограммирован, в ответ на входной сигнал, указывающий событие автоматического останова двигателя, эксплуатировать механизм блокировки в заблокированном режиме, чтобы предотвращать оказание влияния электрического привода на работу рулевого механизма. Причем предопределенный ток убывает в направлении предельного тока в ответ на входной сигнал, указывающий подготовку к автоматическому останову двигателя. Причем предопределенный ток возрастает в направлении запрошенного тока в ответ на входной сигнал, указывающий увеличение числа оборотов двигателя. Причем по меньшей мере один контроллер дополнительно запрограммирован, в ответ на запрос изменить передаточное отношение рулевого механизма на величину, которая дает в результате запрошенный ток электрического привода, являющийся большим, чем предопределенный ток, и входной сигнал, указывающий отсутствие выработки электрической мощности для поддержки электрического привода, эксплуатировать электрический привод на предопределенном токе. Причем электрический привод является электродвигателем.
В настоящей заявке предлагается транспортное средство, содержащее двигатель, выполненный с возможностью осуществлять автоматический останов и автоматический пуск; систему активного рулевого управления, включающую в себя электрический привод; и по меньшей мере один контроллер, запрограммированный, в ответ на запрос изменить передаточное отношение рулевого механизма на величину, которая дает в результате запрошенный ток электрического привода, являющийся большим, чем предопределенный ток, во время события автоматического останова двигателя, эксплуатировать электрический привод на предопределенном токе. Причем предопределенный ток уменьшается до предопределенного предельного тока до того, как перекрыто топливо в двигатель. Причем по меньшей мере один контроллер дополнительно запрограммирован, в ответ на запрос изменить передаточное отношение рулевого механизма на величину, которая дает в результате запрошенный ток электрического привода, являющийся большим, чем предопределенный ток, в то время как двигатель является работающим, эксплуатировать электрический привод на запрошенном токе. Причем предопределенный ток повышается в ответ на выдачу топлива в двигатель. Транспортное средство может дополнительно содержать электрическую машину, присоединенную к двигателю, при этом, по меньшей мере один контроллер дополнительно запрограммирован, в ответ на электрическую машину, работающую в качестве генератора и вырабатывающую ток, по меньшей мере равный запрошенному току, эксплуатировать электрический привод на запрошенном токе. Причем система активного рулевого управления включает в себя механизм блокировки, взаимодействующий с электрическим приводом, и при этом, по меньшей мере один контроллер дополнительно запрограммирован приводить в действие механизм блокировки для эксплуатации системы активного рулевого управления в заблокированном режиме во время события автоматического останова двигателя. Причем предопределенный ток линейно убывает до предопределенного предельного тока после перехода на событие автоматического останова двигателя. Причем предопределенный ток линейно нарастает до запрошенного тока после перехода из события автоматического останова двигателя.
Также в настоящей заявке раскрыт способ, состоящий в том, что принимают, посредством контроллера, входной сигнал, указывающий состояние системы автоматического пуска-останова двигателя; запрашивают, посредством контроллера, требуемый ток для приведения в действие электрического привода, чтобы добиваться передаточного отношения рулевого механизма, которое основано на запросе рулевого управления; и эксплуатируют, посредством контроллера, электрический привод на предельном токе, который является меньшим, чем требуемый ток, в ответ на состояние, указывающее событие автоматического останова двигателя. Причем способ дополнительно состоит в том, что повышают, посредством контроллера, предельный ток до требуемого тока через предопределенный временной интервал в ответ на состояние, указывающее, что число оборотов двигателя является возрастающим. Причем способ дополнительно состоит в том, что эксплуатируют, посредством контроллера, электрический привод на требуемом токе в ответ на состояние, указывающее состояние работающего двигателя. Причем способ дополнительно состоит в том, что понижают, посредством контроллера, предельный ток до минимального предела через предопределенный временной интервал в ответ на состояние, указывающее подготовку к автоматическому останову двигателя. Причем способ дополнительно состоит в том, что выводят, посредством контроллера, индикатор состояния, когда электрический привод эксплуатируется на предельном токе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
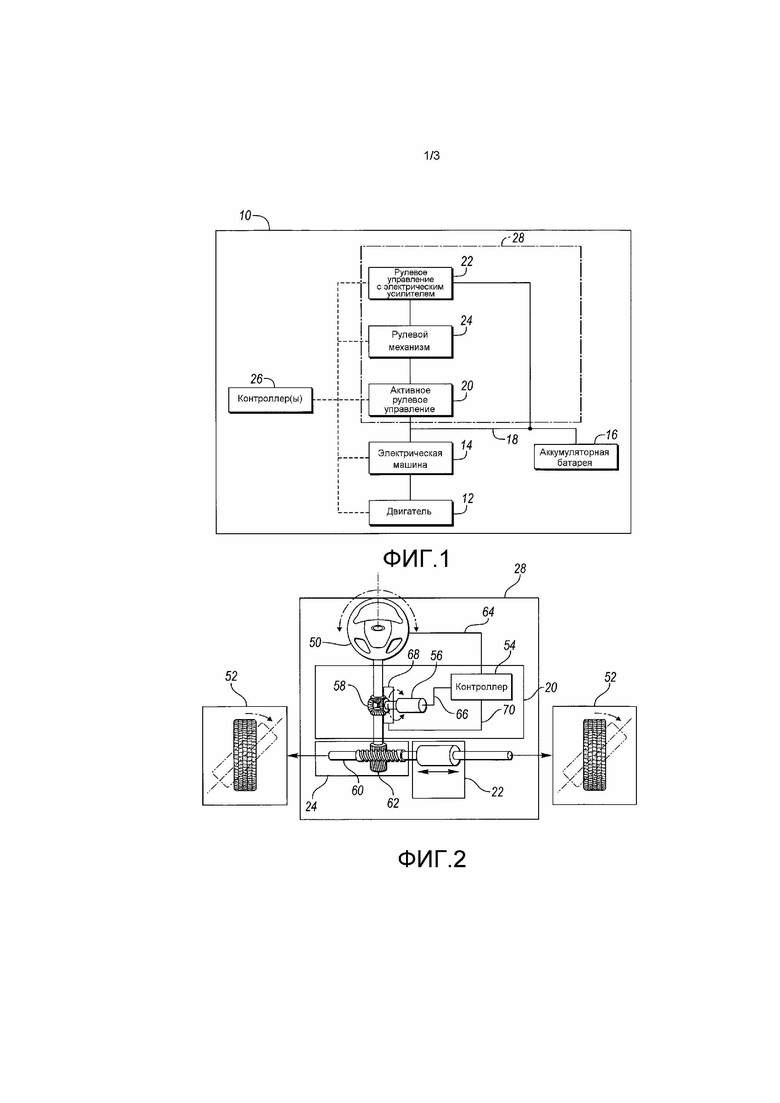
Фиг.1 - схема примерного транспортного средства с автоматическим пуском/остановом, иллюстрирующая типичные компоненты.
Фиг.2 - схема примерной системы рулевого управления, которая включает в себя активное рулевое управление.
Фиг.3 - график, иллюстрирующий состояние двигателя во время события автоматического останова.
Фиг.4 - диаграмма переходов между состояниями из примерных состояний и переходов для системы активного рулевого управления в транспортном средстве с возможностью автоматического пуска-останова двигателя.
ПОДРОБНОЕ ОПИСАНИЕ
Варианты осуществления настоящего раскрытия описаны в материалах настоящей заявки. Должно быть понятно, однако, что раскрытые варианты осуществления являются всего лишь примерами, и другие варианты осуществления могут принимать различные и альтернативные формы. Фигуры не обязательно должны определять масштаб; некоторые признаки могли быть преувеличены или сведены к минимуму, чтобы показать подробности конкретных компонентов. Поэтому, специфичные конструктивные и функциональные детали, раскрытые в материалах настоящей заявки, не должны интерпретироваться в качестве ограничивающих, а только качестве представляющих основу для изучения специалистом в данной области техники для различного применения настоящего изобретения. Как будут понимать рядовые специалисты в данной области техники, различные признаки, проиллюстрированные и описанные со ссылкой на любую одну из фигур, могут комбинироваться с признаками, проиллюстрированными на одной или более других фигур, для создания вариантов осуществления, которые не проиллюстрированы и не описаны явно. Проиллюстрированные комбинации признаков дают характерные варианты осуществления для типичных применений. Различные комбинации и модификации признаков, совместимых с доктринами этого раскрытия, однако, могли бы требоваться для конкретных применений или реализаций.
Фиг.1 изображает примерную структурную схему транспортного средства. Транспортное средство 10 может включать в себя двигатель 12 для энергоснабжения транспортного средства 10. Двигатель 12 может быть механически присоединен к электрической машине 14. Электрическая машина 14 может функционировать в качестве генератора переменного тока и стартера. При эксплуатации в качестве стартера, электрическая машина 14 может принимать электрическую мощность из аккумуляторной батареи 16 через сеть 18 электропитания. Электрическая машина 14 может преобразовывать электрическую мощность в механическое вращение для прокручивания двигателя 12, чтобы запускать двигатель 12.
При эксплуатации в качестве генератора переменного тока или генератора, электрическая машина 14 может преобразовывать механическую энергию от вращения двигателя 12 в электрическую энергию в сети 18 электропитания. Электрическая энергия может накапливаться в аккумуляторной батарее 16 или использоваться электрическими компонентами, присоединенными к сети 18 электропитания.
Транспортное средство 10 может включать в себя систему 28 рулевого управления, которая включает в себя рулевой механизм 24, присоединенный к передним колесам транспортного средства 10. Система 28 рулевого управления может включать в себя модуль 20 активного рулевого управления (AFS). Модуль 20 AFS может содействовать приведению в движение рулевого механизма 24, чтобы менять передаточное отношение, с которым колеса поворачиваются в ответ на поворачивание рулевого колеса. Например, на более низких скоростях транспортного средства, высокое передаточное отношение может быть реализовано, из условия чтобы рулевое колесо поворачивалось в меньшей степени для данного угла поворота управляемых колес. Это предоставляет возможность, чтобы крутые повороты выполнялись с меньшим входным сигналом на рулевом колесе. На более высоких скоростях транспортного средства, передаточное отношение может понижаться, из условия, чтобы рулевое колесо поворачивалось в большей степени для данного угла поворота управляемых колес. Это понижает чувствительность системы 28 рулевого управления к изменениям на рулевом колесе на более высоких скоростях. Результирующий эффект состоит в том, что, на более высоких скоростях, колеса поворачиваются в меньшей степени в ответ на поворачивание рулевого колеса.
Система 28 рулевого управления может включать в себя модуль 22 (EPAS) рулевого управления с электрическим усилителем, который может работать вместе с рулевым механизмом 24. Модуль 22 EPAS может содействовать приведению в движение рулевого механизма 24, чтобы уменьшать величину усилия водителя, требуемого для рулевого управления транспортным средством 10. Модуль 22 EPAS может включать в себя электродвигатель, который содействует приведению в движение рулевого механизма 24. Модуль 22 EPAS может добавлять крутящий момент в дополнение к крутящему моменту, выдаваемому водителем, чтобы изменять направление передних колес.
Модуль 20 AFS и модуль 22 EPAS могут быть электрически присоединены к сети 18 электропитания. Электропитание может обеспечиваться энергией, накопленной в аккумуляторной батарее 16. Электрическая машина 14 также может выдавать электропитание при работе в качестве генератора. Модуль 20 AFS и модуль 22 EPAS могут поддерживать связь с одним или более контроллеров 26 в транспортном средстве.
Транспортное средство может включать в себя один или более контроллеров 26 для координации и управления работой различных компонентов. Один или более контроллеров 26 могут сопрягаться с различными устройствами с помощью проводных сигналов или последовательной шины связи (например, локальной сети контроллеров (CAN)). Контроллеры 26 могут включать в себя микропроцессор и энергонезависимую память для хранения данных, когда питание контроллеров 26 выключено.
Двигатель 12 может быть выполнен с возможностью осуществлять автоматический останов и автоматический пуск. Во время эксплуатации транспортного средства, двигатель может останавливаться и запускаться во время цикла зажигания. Условия могут контролироваться, чтобы определять, когда следует автоматически останавливать двигатель 12 для улучшения экономии топлива. Условия также могут контролироваться, чтобы определять, когда следует автоматически запускать двигатель 12.
Со ссылкой на фиг.3, последовательность останова/пуска двигателя может включать в себя несколько стадий: «начало автоматического останова», которая отмечает начало автоматического останова двигателя; «подготовка к автоматическому останову двигателя», которая является периодом времени, в течение которого системы транспортного средства, а также двигатель подготавливаются к предстоящему останову двигателя (если условие подавления автоматического останова выявляется в течение этой стадии, подготовка к предстоящему останову двигателя прерывается, и системы и двигатель транспортного средства возвращаются к своим нормальным рабочим режимам); «перекрытие топлива», которая отмечает момент, в который прекращается поток топлива в двигатель; «остановка двигателя», которая является периодом времени, в течение которого число оборотов двигателя снижается до нуля; «ниже перезапуска подачей топлива», которая отмечает момент, после которого, если запрошен перезапуск для подавления автоматического останова во время стадии «остановка двигателя», стартеру может быть необходимо вводиться в действие, чтобы проворачивать коленчатый вал двигателя (если перезапуск запрошен до «ниже перезапуска подачей топлива» и во время стадии «остановка двигателя», двигатель может перезапускаться, чтобы подавлять автоматический останов, посредством включения потока топлива обратно); «число оборотов двигателя = 0», которая отмечает момент, в который число оборотов двигателя находится около или равно 0; «двигатель автоматически остановлен», которая является периодом времени, в течение которого двигатель выключен; «ввод в действие стартера», которая отмечает момент, в который стартер начинает проворачивать коленчатый вал двигателя в попытке запустить двигатель (в ответ на выявление условия автоматического пуска двигателя); «проворачивание коленчатого вала двигателя стартером», которая является периодом времени, в течение которого двигатель не способен проворачивать коленчатый вал под своей собственной мощью; «выключение стартера», которая отмечает момент, в который двигатель способен проворачивать коленчатый вал под своей собственной мощью; «повышение числа оборотов двигателя», которая является периодом времени, в течение которого число оборотов двигателя возрастает до своего рабочего числа оборотов; и «окончание автоматического пуска», которая отмечает момент, в который число оборотов двигателя достигает своего рабочего числа оборотов (числа оборотов на или выше целевого числа оборотов холостого хода). Событие автоматического останова двигателя может включать в себя все стадии с «начала автоматического останова» по «окончание автоматического пуска».
Фиг.2 изображает схему примерной системы 28 рулевого управления. Система 28 рулевого управления может быть выполнена с возможностью осуществлять рулевое управление транспортным средством 10 в направлении, желательном водителю. Система 28 рулевого управления может включать в себя рулевое колесо 50, которое приводится в действие водителем. Система 28 рулевого управления может преобразовывать движение рулевого колеса 50 в перемещение передних колес 52, чтобы вызывать изменение направления транспортного средства 10. Рулевой механизм 24 может быть конфигурацией зубчатой рейки 60 и ведущей шестерни 62, в которой передние колеса 52 присоединены к зубчатой рейке 60, а рулевое колесо 50 присоединено к ведущей шестерне 62.
Модуль 20 AFS может включать в себя электрический привод или электрическую машину 56, присоединенные к дифференциальной или планетарной передаче 58. Электрическая машина 56 может побуждать ведущую шестерню 62 вращаться, что может заставлять зубчатую рейку 60 вращаться и побуждать передние колеса 52 изменять направление. Рулевое колесо 50 также может быть присоединено через зубчатую передачу 58 AFS. Переменное передаточное отношение между рулевым колесом 50 и колесами 52 может вызываться эксплуатацией модуля 20 AFS, чтобы приводить в движение ведущую шестерню 62 по мере того, как поворачивается рулевое колесо 50. Передаточное отношение может быть отношением между углом поворота рулевого колеса и углом, на который поворачиваются колеса (например, углом поворота управляемых колес). Контроллер 54 может принимать входной сигнал 64 угла поворота рулевого колеса, указывающий положение рулевого колеса 50, и может вырабатывать один или более выходных сигналов 66 для эксплуатации электрической машины 56. Дополнительные входные сигналы и выходные сигналы могут использоваться контроллером 54. Контроллер 54 может поддерживать связь с другими контроллерами, такими как контроллер двигателя или системный контроллер транспортного средства.
Контроллер 54 может быть запрограммирован контролировать входной сигнал 64 угла поворота рулевого колеса с рулевого колеса 50. Передаточное отношение рулевого механизма может определяться на основании угла поворота рулевого колеса и скорости транспортного средства. На основании передаточного отношения рулевого механизма, контроллер 54 может определять требуемый ток для электрической машины 56. Контроллер 54 может управлять током через электрическую машину 56 с помощью выходных сигналов 66.
Модуль 20 AFS может включать в себя механизм 68 блокировки. Механизм 68 блокировки может быть устройством с соленоидным приводом, которое, когда приведено в действие, предотвращает поворачивание ведущей шестерни 62 электрической машиной. Когда механизм 68 блокировки введен в действие, модуль 20 AFS не может содействовать рулевому управлению транспортного средства, и рулевое управление выполняется с использованием выходного сигнала рулевого колеса 50. Механизм 68 блокировки может управляться выходным сигналом 70 из контроллера 54.
Модули EPAS 22 и AFS 20 присоединены к сети 18 электропитания и могут получать электрическую мощность из электрической машины 14 или аккумуляторной батареи 16. Во время работы, модули EPAS 22 и AFS 20 могут отбирать значительную величину тока из сети 18 электропитания. В условиях, в которых двигатель 12 является работающим, а электрическая машина 14 подводит электрическую мощность в сеть 18 электропитания, энергия, накопленная в аккумуляторной батарее 16, может не истощаться. Однако, когда двигатель 12 не является работающим, электропитание обеспечивается аккумуляторной батареей 16. Результатом может быть падение напряжения сети 18 электропитания, которое может оказывать отрицательное влияние на модули EPAS 22 или AFS 20. Например, напряжение может падать достаточно низко, так что модули EPAS 22 или AFS 20 не могут функционировать в достаточной мере.
Еще одна проблема состоит в том, что, несмотря на то, что EPAS 22 и AFS 20 отбирают ток, может быть принято решение перезапустить двигатель 12 с использованием электрической машины 14. Использование электрической машины 14 для пуска двигателя вызывает повышение отбора тока из аккумуляторной батареи 16, которое может приводить к дополнительному падению напряжения. Результат состоит в том, что электрическая машина 14 может не получать достаточную мощность для пуска двигателя 12. Это является нежелательной ситуацией, так как водитель может не иметь в распоряжении движущей силы, когда она требуется.
Для решения этих проблем, может быть выгодным управлять потребными мощностями модуля 22 EPAS и модуля 20 AFS во время событий автоматического пуска-останова двигателя. Максимальный отбор тока модуля AFS может быть ограничен предопределенным пороговым значением во время событий автоматического пуска-останова. Например, во время события автоматического пуска-останова двигателя, максимальный ток, отбираемый модулем 20 AFS, может быть ограничен значением 5 ампер. Ток может оставаться ограниченным до тех пор, пока не происходит перезапуск двигателя, и напряжение сети электропитания не возвращается к нормальным рабочим уровням.
Падение напряжения аккумуляторной батареи 16 может контролироваться во время события автоматического останова двигателя. Во время события автоматического останова двигателя, напряжение аккумуляторной батареи 16 может убывать, так как электрическая машина 14 больше может не выдавать мощность в сеть 18 электропитания. Напряжение аккумуляторной батареи 16 может падать до минимального калиброванного порогового значения.
Модуль 22 EPAS может эксплуатироваться в ограниченном режиме во время событий автоматического останова двигателя. Модуль 22 EPAS может быть выполнен с возможностью не обеспечивать содействие во время событий автоматического останова двигателя. В качестве альтернативы, содействие EPAS может действовать с пониженной несущей способностью во время события автоматического останова двигателя. Модуль 22 EPAS может эксплуатироваться, из условия, чтобы максимальный отбор тока модуля 22 EPAS был меньшим, чем предопределенное пороговое значение во время событий автоматического останова двигателя. Результирующее влияние на транспортное средство состоит в том, что крутящий момент водителя, требуемый для рулевого управления транспортным средством, повышается во время событий автоматического останова двигателя.
Эксплуатация системы 20 AFS может быть основана на рабочем статусе или состоянии системы автоматического пуска-останова двигателя. Рабочее состояние системы автоматического пуска-останова двигателя может широковещательно передаваться в контроллеры через линию связи. Система автоматического пуска-останова двигателя может работать в одном или боле отдельных состояний или стадий, которые могут оказывать влияние на работу системы 20 AFS. Фиг.4 изображает примерную диаграмму 200 состояний, показывающую возможные состояния системы активного рулевого управления, связанные с переходами между состояниями и рабочими режимами системы автоматического пуска-останова двигателя.
Контроллер 54 может эксплуатировать электрический привод 56 на основании запроса изменить передаточное отношение рулевого механизма. В ответ на запрос изменить передаточное отношение рулевого механизма, контроллер 54 может определять требуемый ток для электрического привода 56. Другие входные сигналы, такие как скорость транспортного средства, также может использоваться для определения требуемого тока. Контроллер 54 затем может побуждать ток с амплитудой требуемого тока течь через электрический привод 56. Режим работы системы AFS может быть основан на состоянии системы автоматического пуска-останова двигателя. Контроллер 54 может принимать входной сигнал, который является указывающим событие автоматического останова двигателя.
Диаграмма 200 состояния может включать в себя рабочие состояния (208-218) для системы автоматического пуска-останова двигателя и соответствующие режимы работы (202-206) для системы 20 AFS. Режим работы (202-206) системы 20 AFS может быть основан на текущем рабочем состоянии (208-218) системы автоматического пуска-останова двигателя. Работа системы 20 AFS может происходить в поддерживаемом режиме 202, когда рабочим состоянием системы автоматического пуска-останова двигателя является Работающий двигатель, 208, или Подготовка к автоматическому останову двигателя, 210. В поддерживаемом режиме 202, система 20 AFS может быть полностью действующей и наделена возможностью отбирать полный требуемый ток из сети 18 электропитания. Электрический привод 56 может эксплуатироваться на требуемом токе в поддерживаемом режиме 202.
Эксплуатация системы 20 AFS может происходить в необеспеченном или неподдерживаемом режиме 204, когда рабочим состоянием системы автоматического пуска-останова двигателя является Остановка двигателя, 212, Двигатель автоматически остановлен, 214 или Проворачивание коленчатого вала двигателя стартером, 216. В необеспеченном режиме 204, система 20 AFS может ограничиваться по току, а привод 56 AFS может быть заблокирован или удерживаться. Когда система AFS является работающей в необеспеченном режиме 204, максимально допустимый ток электрического привода 56 может ограничиваться контроллером 54, чтобы был не большим, чем предопределенный ток. В этом режиме, когда запрос рулевого управления вызывает требуемый ток, который является большим, чем предопределенный ток, ток может ограничиваться предопределенным током. Если требуемый ток является меньшим, чем предопределенный ток, то электрический привод 56 может эксплуатироваться на требуемом токе. В этом режиме, контроллер 54 может активировать механизм 68 блокировки для ограничения влияния электрического привода 56. Во время события автоматического останова двигателя, система 20 AFS может выдавать пониженную производительность и не будет предотвращать перезапуск двигателя.
Работа системы 20 AFS может происходить в поддерживаемом неминуемом режиме 206, когда рабочим состоянием системы автоматического пуска-останова двигателя является Повышение числа оборотов двигателя, 218. В поддерживаемом неминуемом режиме 206, может быть предоставлена возможность ограниченной работы системы 20 AFS. Контроллер 54 может ограничивать ток электрического привода 56, чтобы не был большим, чем предопределенный ток. В этом режиме, предопределенный ток может повышаться в направлении требуемого тока.
Когда двигатель 12 является действующим в работающем состоянии, состояние автоматического пуска-останова двигателя может находиться в состоянии 208 Работающего двигателя. В состоянии 208 Работающего двигателя, различные условия 220 Начала автоматического останова могут контролироваться касательно перехода к автоматическому останову двигателя. Система автоматического пуска-останова двигателя может переходить в состояние 210 Подготовки к автоматическому останову двигателя, когда удовлетворены условия 220 Начала автоматического останова. Условия 220 Начала автоматического останова могут быть основаны на положении педали акселератора, скорости транспортного средства и положении тормозной педали. Другие входные сигналы также могут оказывать влияние на условия 220 Начала автоматического останова. Например, условия 220 Начала автоматического останова могут быть удовлетворены, когда положение педали акселератора является меньшим, чем пороговое значение, или когда положение тормозной педали находится выше порогового значения.
В состоянии 210 Подготовки к автоматическому останову двигателя, контроллер 26 может выполнять операции для подготовки системы к остановке двигателя. Во время состояния 210 Подготовки к автоматическому останову двигателя, системе 20 AFS может быть предоставлена возможность действовать. Контроллер 54 может ограничивать ток электрического привода 56, чтобы не был большим, чем предопределенный ток. Предопределенный ток для электрического привода 56 может линейно снижаться от требуемого тока до предопределенного предельного значения (например, 5 ампер). Состояние 210 Подготовки к автоматическому останову двигателя может переходить в состояние 212 Остановки двигателя, когда удовлетворены определенные условия 222 Перекрытия топлива. Например, условия 222 Перекрытия топлива могут включать в себя число оборотов двигателя, являющееся меньшим, чем предопределенное число оборотов.
В состоянии 212 Остановки двигателя, контроллер 26 может выполнять операции для доведения двигателя до полной остановки. Операции, которые могут выполняться, могут состоять в том, чтобы эксплуатировать электрическую машину 14 для снижения числа оборотов двигателя. Число оборотов двигателя может контролироваться, чтобы выявлять, когда двигатель 12 выключен. Во время состояния 212 Остановки двигателя, система 20 AFS может находиться в неподдерживаемом режиме 204. Состояние 212 Остановки двигателя может переходить в состояние 214 Двигатель автоматически остановлен, когда удовлетворены определенные условия 224 Выключения двигателя. Условия 224 Выключения двигателя могут включать в себя число оборотов двигателя, являющееся приблизительно нулевым.
В состоянии 214 Двигатель автоматически остановлен, контроллер 26 может выполнять операции для контроля перезапуска двигателя. Например, входные сигналы, такие как положение педали акселератора и положение тормозной педали, могут контролироваться, чтобы определять, когда двигатель 12 должен быть перезапущен. Во время состояния 214 Двигатель автоматически остановлен, система 20 AFS может находиться в неподдерживаемом режиме 204. Когда выявлены условия 226 Начала автоматического пуска, система автоматического пуска-останова двигателя может переходить в состояние 216 Проворачивания коленчатого вала двигателя стартером.
В состоянии 216 Проворачивания коленчатого вала двигателя стартером, контроллер 26 может выполнять операции для повторного проворачивания коленчатого вала двигателя. Электрическая машина 14 может отбирать мощность из аккумуляторной батареи 16, чтобы вращать двигатель 12. Число оборотов двигателя 12 может повышаться в течение этого состояния. Во время состояния 216 Проворачивания коленчатого вала двигателя стартером, система 20 AFS может находиться в неподдерживаемом режиме 204. Состояние 216 Проворачивания коленчатого вала двигателя стартером может переходить в состояние 218 Повышения числа оборотов двигателя, когда удовлетворены определенные условия 228 Выключения стартера. Условия 228 Выключения стартера могут включать в себя те случаи, когда число оборотов двигателя повысилось до большего, чем предопределенное, числа оборотов.
В состоянии 218 Повышения числа оборотов двигателя, контроллер 26 может выполнять операции для эксплуатации двигателя 12 и связанных систем. Во время этого состояния, число оборотов двигателя может быть возрастающим или может регулироваться предопределенным числом оборотов холостого хода. Контроллер 26 может вызывать впрыск топлива и вызывать искру в двигателе 12, чтобы инициировать сгорание. Двигатель 12 может начинать работу, и число оборотов двигателя может изменяться для достижения числа оборотов холостого хода. Во время состояния 218 Повышения числа оборотов двигателя, предельное значение тока AFS может линейно повышаться до нормального рабочего предельного значения или требуемого тока. Во время состояния 218 Повышения числа оборотов двигателя, система 20 AFS может находиться в поддерживаемом неминуемом режиме 206. Состояние 218 Повышения числа оборотов двигателя может переходить в состояние 208 Работающего двигателя, когда удовлетворены определенные условия 230 Окончания автоматического пуска. Условия 230 Окончания автоматического пуска могут заключаться в том, что готов генератор 14 переменного тока. Условия 230 Окончания автоматического пуска могут определяться по состоянию электрической машины 14. Условия 230 Окончания автоматического пуска могут быть удовлетворены, когда электрическая машина 14 является действующей в качестве генератора и подает энергию в сеть 18 электропитания. Отметим, что, в состоянии 218 Повышения числа оборотов двигателя, электрическая машина 14 может переходить с действия в качестве электродвигателя (функции стартера) на генератор (функцию генератора переменного тока).
Возможны другие пути через состояния. Например, могут быть ситуации во время события автоматического пуска-останова двигателя, в которых последовательность состояний может изменяться. Эти ситуации могут быть описаны в качестве ситуаций «изменения намерения». Например, во время события автоматического пуска-останова двигателя, может определяться, что двигатель должен быть перезапущен до того, как двигатель полностью остановлен. Событие автоматического останова двигателя может включать в себя операции от остановки двигателя до следующего перезапуска двигателя.
Первая ситуация изменения намерения может происходить, когда система находится в состоянии 210 Подготовки к автоматическому останову двигателя. Могут присутствовать условия 232 Отмены автоматического останова, которые вызывают переход обратно в состояние 208 Работающего двигателя. Эти условия могут включать в себя отпускание тормозной педали или нажатие педали акселератора. В этих ситуациях, система может переходить обратно в состояние 208 Работающего двигателя, так как топливо все еще выдается в двигатель 12.
Вторая ситуация изменения намерения может происходить, когда событие автоматического пуска-останова двигателя отменяется во время состояния 212 Остановки двигателя, в то время как число оборотов двигателя понижается до того, как удовлетворены условия 224 Выключения двигателя. Система может переходить в состояние 218 Повышения числа оборотов двигателя из состояния 212 Остановки двигателя, когда удовлетворены определенные условия 234 Перезапуска без проворачивания коленчатого вала. Условия 234 перезапуска двигателя без проворачивания коленчатого вала могут включать в себя отпускание тормозной педали или увеличение положения акселератора, указывающие потребность в движущей силе.
Третья ситуация изменения намерения может возникать вследствие заглохшего двигателя. Эта ситуация может вызывать переход из состояния 208 Работающего двигателя в состояние 214 Двигатель автоматически остановлен на основании условий 236 глушения. Условия 236 глушения могут включать в себя нахождение числа оборотов двигателя ниже предопределенного порогового значения, что указывает, что двигатель 12 заглох. В транспортном средстве, имеющем ручную трансмиссию, двигатель 12 может глохнуть вследствие неточного управления сцеплением или выбора передачи водителем. В транспортном средстве, имеющем автоматическую трансмиссию, заглохший двигатель 12 может быть следствием системной ошибки, которая вызывает неправильную работу двигателя 12 или трансмиссии.
Транспортное средство также может включать в себя интерфейс оператора для сообщения информации о состоянии водителю. Интерфейс оператора может включать в себя световую сигнализацию, измерительные приборы, устройства отображения или другие индикаторы для указания состояния функций транспортного средства. Например, сообщение лампой или на устройстве отображения может быть выполнено с возможностью указывать, когда система EPAS или AFS работает в ограниченном режиме. Сообщение лампой или на устройстве отображения может вводиться в действие, когда работа системы EPAS или AFS запрошена вовремя события автоматического останова двигателя, в котором система EPAS или AFS работают в режиме пониженной производительности (например, в режиме работы на ограниченном токе). Интерфейс оператора может включать в себя переключатель или кнопку для отмены режима пониженной производительности. Например, когда переключатель или кнопка нажаты, система EPAS или AFS может возвращаться к нормальной работе (например, ток больше не ограничивается). Другие конфигурации могут включать в себя дисплейный интерфейс, который дает оператору возможность активировать и деактивировать режим пониженной производительности систем EPAS и AFS.
Последовательности операций, способы или алгоритмы, раскрытые в материалах настоящей заявки, могут быть подлежащими выполнению/реализованы устройством обработки, контроллером или компьютером, которые могут включать в себя существующий программируемый электронный блок управления или специальный электронный блок управления. Подобным образом, последовательности операций, способы или алгоритмы могут храниться в качестве данных и команд, исполняемых контроллером или компьютером, в многих формах, в том числе, ноне в качестве ограничения, информации, постоянно хранимой на незаписываемом запоминающем носителе, таком как устройства ПЗУ (постоянного запоминающего устройства, ROM), и информации, с возможностью изменения хранимой на записываемом запоминающем носителе, таком как гибкие диски, магнитные ленты, CD (компакт-диски), устройства ОЗУ (оперативного запоминающего устройства, RAM) и другие магнитные и оптические носители. Последовательности операций, способы или алгоритмы также могут быть реализованы в программном исполняемом объекте. В качестве альтернативы, последовательности операций, способы или алгоритмы могут быть воплощены полностью или частично с использованием пригодных аппаратных компонентов, таких как специализированные интегральные схемы (ASIC), программируемые пользователем вентильные матрицы (FPGA), конечные автоматы, контроллеры или другие аппаратные компоненты или устройства, или комбинации аппаратных средств, программных средств и программно-аппаратных компонентов.
Несмотря на то, что примерные варианты осуществления описаны выше, не предполагается, что эти варианты осуществления описывают все возможные формы, охваченные формулой изобретения. Словесные формулировки, используемые в описании изобретения, предпочтительнее являются словесными формулировками описания, нежели ограничением, и понятно, что различные изменения могут быть произведены, не выходя из сущности и объема раскрытия. Как описано ранее, признаки различных вариантов осуществления могут комбинироваться для формирования дополнительных вариантов осуществления изобретения, которые могут не быть описаны или проиллюстрированы в прямой форме. Несмотря на то, что различные варианты осуществления могли бы быть описаны в качестве обеспечивающих преимущества или являющихся предпочтительными над другими вариантами осуществления или реализациями предшествующего уровня техники, что касается одной или более требуемых характеристик, рядовые специалисты в данной области техники осознают, что один или более признаков или характеристик могут быть скомпрометированы для достижения требуемых общих свойств системы, которые зависят от конкретных применения и реализации. Эти свойства могут включать в себя, но не в качестве ограничения: себестоимость, прочность, надежность, затраты в течение жизненного цикла, пригодность для продажи, внешний вид, упаковку, габариты, ремонтопригодность, вес, технологичность, легкость сборки, и т. д. По существу, варианты осуществления, описанные в качестве менее желательных, чем другие варианты осуществления, или реализации предшествующего уровня техники по отношению к одной или более характеристик, не выходят за пределы объема раскрытия и могут быть желательными для конкретных применений.


Изобретение относится к транспортным средствам. Система активного рулевого управления содержит электрический привод, присоединенный к рулевому механизму для регулирования передаточного отношения рулевого управления, и контроллер, запрограммированный в ответ на запрос изменить передаточное отношение рулевого управления на величину, которая дает в результате запрошенный ток электрического привода, являющийся большим, чем предопределенный ток. При наличии входного сигнала, указывающего событие автоматического останова двигателя, контроллер эксплуатирует электрический привод на предопределенном токе. Повышается надежность системы. 3 н. и 17 з.п. ф-лы, 4 ил.
1. Система активного рулевого управления, содержащая:
электрический привод, присоединенный к рулевому механизму для регулирования передаточного отношения рулевого управления; и
контроллер, запрограммированный в ответ на запрос изменить передаточное отношение рулевого управления на величину, которая дает в результате запрошенный ток электрического привода, являющийся большим, чем предопределенный ток, при наличии входного сигнала, указывающего событие автоматического останова двигателя, эксплуатировать электрический привод на предопределенном токе.
2. Система активного рулевого управления по п.1, в которой по меньшей мере один контроллер дополнительно запрограммирован, в ответ на запрос изменить передаточное отношение рулевого управления на величину, которая дает в результате запрошенный ток электрического привода, являющийся большим, чем предопределенный ток, при наличии входного сигнала, указывающего работающий двигатель, эксплуатировать электрический привод на запрошенном токе.
3. Система активного рулевого управления по п.1, дополнительно содержащая механизм блокировки, взаимодействующий с электрическим приводом, и при этом, по меньшей мере один контроллер дополнительно запрограммирован, в ответ на входной сигнал, указывающий событие автоматического останова двигателя, эксплуатировать механизм блокировки в заблокированном режиме, чтобы предотвращать изменение передаточного отношения рулевого управления рулевого механизма электрическим приводом.
4. Система активного рулевого управления по п.1, в которой предопределенный ток убывает в направлении предельного тока в ответ на входной сигнал, указывающий подготовку к автоматическому останову двигателя.
5. Система активного рулевого управления по п.1, в которой предопределенный ток возрастает в направлении запрошенного тока в ответ на входной сигнал, указывающий увеличение числа оборотов двигателя.
6. Система активного рулевого управления по п.1, в которой по меньшей мере один контроллер дополнительно запрограммирован, в ответ на запрос изменить передаточное отношение рулевого управления на величину, которая дает в результате запрошенный ток электрического привода, являющийся большим, чем предопределенный ток, и входной сигнал, указывающий отсутствие выработки электрической мощности для поддержки электрического привода, эксплуатировать электрический привод на предопределенном токе.
7. Система активного рулевого управления по п.1, в которой электрический привод является электродвигателем.
8. Транспортное средство, содержащее:
двигатель, выполненный с возможностью осуществлять автоматический останов и автоматический пуск;
систему активного рулевого управления, включающую в себя электрический привод; и
по меньшей мере один контроллер, запрограммированный, в ответ на запрос изменить передаточное отношение рулевого управления на величину, которая дает в результате запрошенный ток электрического привода, являющийся большим, чем предопределенный ток, во время события автоматического останова двигателя, эксплуатировать электрический привод на предопределенном токе.
9. Транспортное средство по п.8, в котором предопределенный ток уменьшается до предопределенного предельного тока до того, как перекрыто топливо в двигатель.
10. Транспортное средство по п.8, в котором по меньшей мере один контроллер дополнительно запрограммирован, в ответ на запрос изменить передаточное отношение рулевого управления на величину, которая дает в результате запрошенный ток электрического привода, являющийся большим, чем предопределенный ток, в то время как двигатель является работающим, эксплуатировать электрический привод на запрошенном токе.
11. Транспортное средство по п.8, в котором предопределенный ток повышается в ответ на выдачу топлива в двигатель.
12. Транспортное средство по п.8, дополнительно содержащее электрическую машину, присоединенную к двигателю, при этом, по меньшей мере один контроллер дополнительно запрограммирован, в ответ на электрическую машину, работающую в качестве генератора и вырабатывающую ток, по меньшей мере равный запрошенному току, эксплуатировать электрический привод на запрошенном токе.
13. Транспортное средство по п.8, в котором система активного рулевого управления дополнительно включает в себя механизм блокировки, взаимодействующий с электрическим приводом, и при этом, по меньшей мере один контроллер дополнительно запрограммирован приводить в действие механизм блокировки для эксплуатации системы активного рулевого управления в заблокированном режиме для предотвращения изменений передаточного отношения рулевого управления во время события автоматического останова двигателя.
14. Транспортное средство по п.8, в котором предопределенный ток линейно убывает до предопределенного предельного тока после перехода на событие автоматического останова двигателя.
15. Транспортное средство по п.8, в котором предопределенный ток линейно нарастает до запрошенного тока после перехода из события автоматического останова двигателя.
16. Способ эксплуатации системы активного рулевого управления, содержащий этапы, на которых:
принимают, посредством контроллера, входной сигнал, указывающий состояние системы автоматического пуска-останова двигателя;
запрашивают, посредством контроллера, требуемый ток для приведения в действие электрического привода, чтобы добиваться передаточного отношения рулевого управления, которое основано на запросе рулевого управления; и
эксплуатируют, посредством контроллера, электрический привод на предельном токе, который является меньшим, чем требуемый ток, в ответ на состояние, указывающее событие автоматического останова двигателя.
17. Способ по п.16, дополнительно содержащий этап, на котором повышают, посредством контроллера, предельный ток до требуемого тока через предопределенный временной интервал в ответ на состояние, указывающее, что число оборотов двигателя является возрастающим.
18. Способ по п.16, дополнительно содержащий этап, на котором эксплуатируют, посредством контроллера, электрический привод на требуемом токе в ответ на состояние, указывающее состояние работающего двигателя.
19. Способ по п.16, дополнительно содержащий этап, на котором понижают, посредством контроллера, предельный ток до минимального предела через предопределенный временной интервал в ответ на состояние, указывающее подготовку к автоматическому останову двигателя.
20. Способ по п.16, дополнительно содержащий этап, на котором выводят, посредством контроллера, индикатор состояния, когда электрический привод эксплуатируется на предельном токе.
| US 2005043873 A1, 24.02.2005 | |||
| US 2008208410 A1, 28.08.2008 | |||
| US 2008306654 A1, 11.12.2008 | |||
| ЭЛЕКТРОУСИЛИТЕЛЬ РУЛЕВОГО УПРАВЛЕНИЯ С ВОЛНОВЫМ РЕДУКТОРОМ, АКТИВНОЕ РУЛЕВОЕ УПРАВЛЕНИЕ С ЦИКЛОИДАЛЬНЫМ ВАРИАТОРОМ | 2007 |
|
RU2370398C2 |
| WO 2014108966 A1, 17.07.2014. | |||

