Изобретение относится к области бурения скважин с боковыми стволами и может быть использовано в качестве средства для ориентации и доставки гибкой трубы в боковые стволы скважин при ремонте многоствольных скважин и проведении различных технологических операций.
Известны способ доставки оборудования на колтюбинговой (гибкой) трубе в заданный интервал многоствольной скважины и устройство для его осуществления (пат. РФ №2449107, Е21В 7/08, приор. 01.07.2010 г., опубл. 27.04.2012 г.).
При осуществлении известного способа на колонну насосно-компрессорных труб (НКТ) устанавливают ориентируемые с устья скважины отклонители, производят спуск оборудования в заданный интервал скважины и его доставку через колонны НКТ в боковой ствол при закрытом доступе в интервал, расположенный ниже НКТ, или опускают оборудование в интервал, расположенный ниже колонны НКТ, при закрытом доступе в боковой ствол скважины.
В качестве устройства используют отклонитель, установленный на НКТ. Отклонитель содержит полый поворотный корпус, снабженный продольным окном и направляющим элементом, обеспечивающим прохождение колтюбинговой трубы в боковой ствол скважины или в интервал, расположенный ниже НКТ.
Известно устройство для ориентации гибкой трубы в боковой ствол скважины (пат. РФ №2444603, приор. 24.02.2010 г., опубл. 10.03.2012 г.).
Устройство выполнено с возможностью крепления на колонне НКТ и содержит полый сборный корпус, в котором с возможностью возвратно-поступательного перемещения размещена подпружиненная втулка и привод, обеспечивающий поступательное перемещение подпружиненной втулки при воздействии на него гибкой трубой, полый поворотный шпиндель, в нижней части которого жестко закреплен корпус с отклоняющим элементом и продольным окном для прохода гибкой трубы в ствол скважины, механизм, обеспечивающий преобразование поступательного движения втулки во вращательное движение шпинделя на дискретный угол, а также содержит дополнительную втулку, выполненную с возможностью центрирования гибкой трубы и обеспечения ограничения возвратного движения подпружиненной втулки.
При спуске гибкой трубы (колтюбинга) в скважину оператор следит за показаниями гидравлического индикатора веса (ГИВ). Если в этот момент не произошло уменьшение веса, то есть разгрузка гибкой трубы отсутствует, значит поворота корпуса с отклоняющим элементом оказалось достаточно, и гибкая труба через продольное окно вошла в боковой ствол скважины. Если же при спуске гибкой трубы опять произошла ее разгрузка и ГИВ показал уменьшение нагрузки, значит гибкая труба уперлась в стенку обсадной колонны. Производится еще одна операция по повороту корпуса с отклоняющим элементом. Операции повторяются до тех пор, пока гибкая труба не войдет в боковой ствол скважины.
Недостаток известных средств заключается в том, что ориентацию отклонителей на НКТ относительно бокового ствола скважины производят с устья скважины, при этом снижается точность установки отклонителя (ориентатора) против бокового ствола из-за погрешности данных о точной глубине и азимуте соотоветствующего бокового ствола.
Неоднократный спуск и подъем НКТ усложняет технологию доставки и ориентацию отклонителя для колтюбинговой трубы.
Отсутствие в конструкции блоков контроля за движением ориентатора в скважине делает технологию по его установке в нужном положении малоэффективной и затратной.
Задачей изобретения является упрощение технологии ориентации и доставки гибкой трубы в боковой ствол скважины и снижение трудозатрат за счет снабжения ориентатора приборами контроля за его движением в скважине и установкой в нужном положении на глубине против окна входа в боковой ствол скважины.
Указанная задача достигается тем, что устройство для ориентации и доставки (ориентатор) гибкой трубы в боковой ствол скважины, содержащее поворотный корпус, снабженный направляющим элементом, обеспечивающим прохождение гибкой трубы в боковой ствол скважины, механизм, обеспечивающий поворот корпуса на дискретный угол, механизм фиксации ориентатора в нужном положении, отличается от известного тем, что ориентатор закреплен на гибкой трубе с возможностью пропуска гибкой трубы по направляющему элементу в боковой ствол скважины, снабжен приборами контроля за его движением в скважине и установкой в нужном положении, автономным блоком питания и элементами для беспроводной электромагнитной двусторонней связи по горной породе с наземным блоком управления.
Приборы контроля за движением ориентатора в скважине и установкой его в нужном положении включают электромагнитный датчик дефектоскопа, установленный на поворотном корпусе (корпус), и гироскопический инклинометр, установленный внутри корпуса.
Ориентатор подвешен на гибкой трубе при помощи стопорной муфты, закрепленной на корпусе и обеспечивающей прохождение гибкой трубы в боковой ствол скважины, при этом гибкая труба снабжена ограничительной муфтой, установленной с возможностью упора в стопорную муфту.
Механизм фиксации ориентатора в нужном положении выполнен в виде электромеханического якоря с выдвигающимися стопорными плашками.
Беспроводная электромагнитная двусторонняя связь с наземным блоком управления содержит приемопередатчик электромагнитных волн и дипольный излучатель электромагнитных волн, управляемые электронной функциональной схемой, размещенной в корпусе устройства.
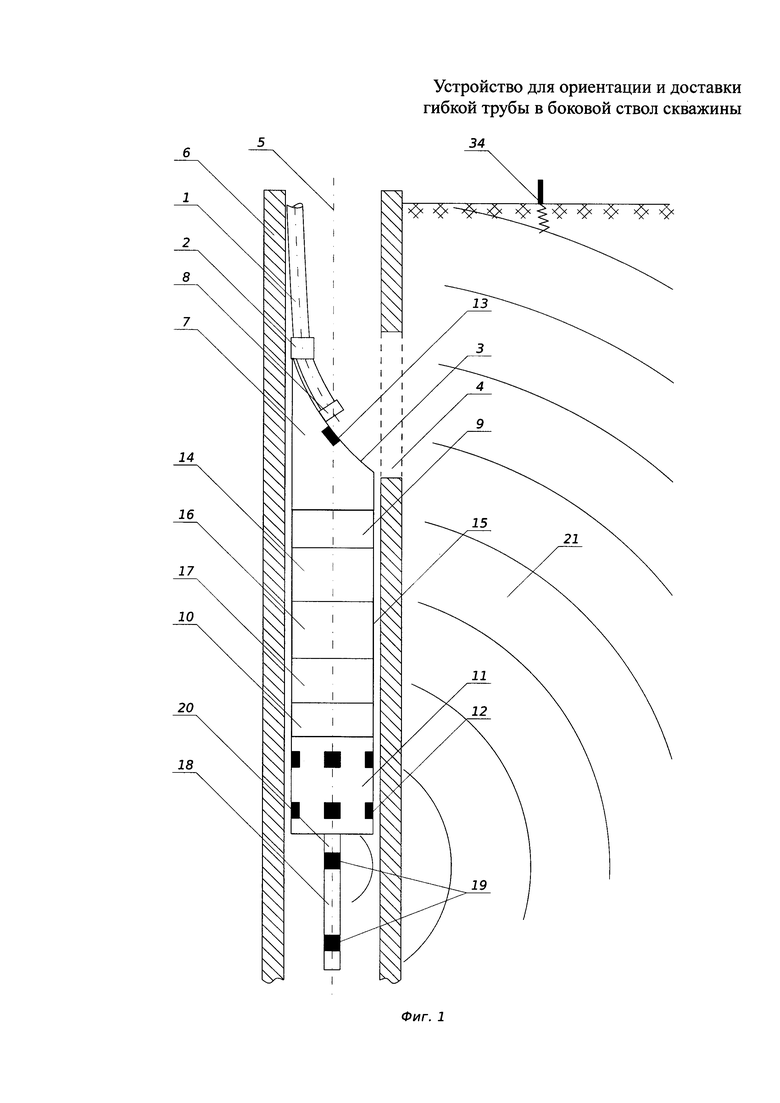
На фиг. 1 представлена скважинная часть устройства для ориентации гибкой трубы в боковой ствол скважины.
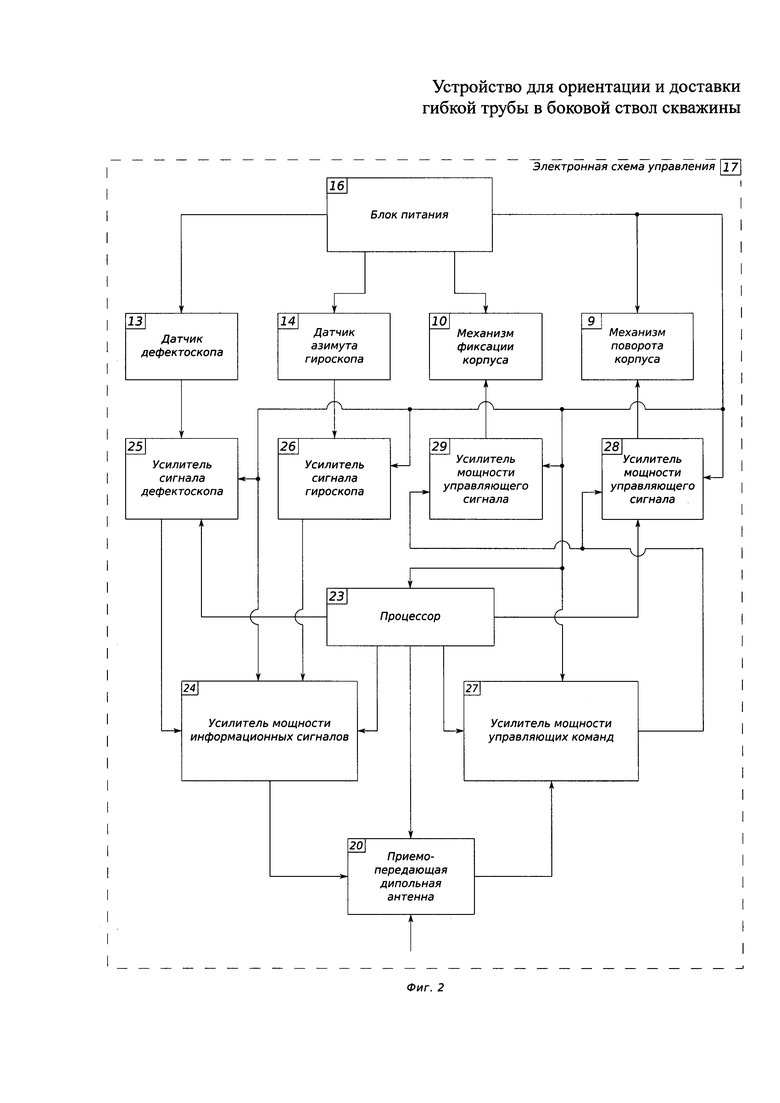
На фиг. 2 изображена электронная функциональная блок-схема для управления ориентатором.
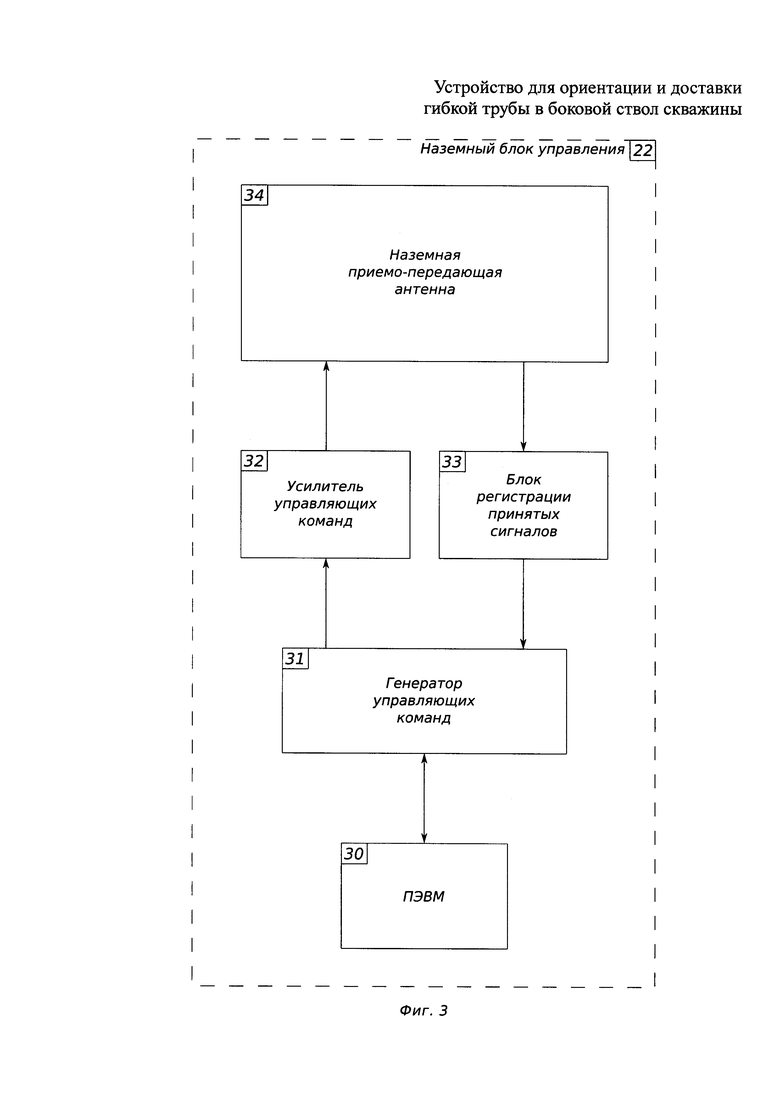
На фиг. 3 изображена блок-схема наземного управления.
Устройство для ориентации и доставки гибкой трубы в боковой ствол скважины состоит из скважинной части - ориентатора и наземной части - блока управления. Ориентатор закреплен на колтюбинге 1 при помощи стопорной муфты 2, обеспечивающей прохождение колтюбинга 1 по направляющему элементу 3 в боковой ствол 4 скважины 5 с металлической обсадной колонной (ОК) 6. При этом стопорная муфта 2 закреплена на поворотном корпусе 7 ориентатора, а гибкая труба 1 снабжена ограничительной муфтой 8, установленной с возможностью упора в стопорную муфту 2 (фиг. 1).
Ориентатор снабжен приводным механизмом 9, обеспечивающим поворот корпуса 7 на дискретный угол, например, с помощью реверсивного дискретного редуктора (на фиг. 1 не показан), и приводным механизмом фиксации 10 ориентатора в нужном положении по глубине, с помощью электромеханического якоря 11 с выдвигающимися стопорными плашками 12.
Приборы контроля за движением ориентатора в скважине и установкой его в нужном положении включают электромагнитный датчик дефектоскопа 13, установленный на поворотном корпусе 7, и гироскопический инклинометр 14, установленный внутри корпуса 15 ориентатора.
Корпус 15 ориентатора выполнен герметичным и в нем размещены автономный блок питания 16 и подключенная к нему электронная функциональная схема управления 17.
Внизу ориентатора установлен электрический разделитель 18 с полюсами диполя 19 (дипольный излучатель), составляющие приемопередающую дипольную антенну 20 для беспроводной электромагнитной двусторонней связи ориентатора по горной породе 21 с наземным блоком управления 22 (фиг. 3).
К автономному блоку питания 16 подключены: механизм 9, обеспечивающий поворот корпуса 7 на дискретный угол, механизм фиксации 10 корпуса ориентатора в нужном положении по глубине, электромагнитный датчик дефектоскопа 13 и гироскопический инклинометр 14.
В электронную функциональную схему управления 17 (фиг. 2) входят: процессор 23, одним выходом подключенный к приемопередающей дипольной антенне 20, другим выходом - к усилителю мощности информационных сигналов 24, своими входами соединенного с усилителем сигналов 25 от электромагнитного датчика дефектоскопа 13 и с усилителем сигналов 26 от гироскопического инклинометра 14, третьим выходом - с усилителем мощности управляющих команд 27, соединенным через усилитель мощности управляющего сигнала 28 с механизмом 9, обеспечивающим поворот корпуса 7, и через усилитель мощности управляющего сигнала 29 - с механизмом фиксации 10 корпуса ориентатора в нужном положении в колонне 6 по глубине.
При этом приемопередающая дипольная антенна 20 своим выходом соединена с усилителем мощности управляющих команд 27, а входом - с усилителем мощности информационных сигналов 24.
Наземный блок управления 22 содержит персональный компьютер - ПЭВМ 30 с генератором управляющих команд 31, соединенный своим выходом с усилителем управляющих команд 32, а входом - с блоком регистрации принятых сигналов 33, которые соединены с наземной приемопередающей антенной 34, принимающей сигналы через породу 21 от приемопередающей дипольной антенны 20, установленной внизу корпуса 15 ориентатора.
Устройство работает следующим образом.
Корпус ориентатора закрепляют на колтюбинге 1, пропустив колтюбинг 1 через стопорную муфту 2 на поворотном корпусе 7 и закрепив от выскальзывания с помощью ограничительной муфты 8.
Затем ориентатор на колтюбинге 1 спускают в обсадную колонну 6 скважины на нужную глубину, где находится окно входа бокового ствола скважины. Во время спуска наземный блок управления 22 и электронная схема управления 17, подключенная к автономному блоку питания 16, обеспечивают функционирование приборов контроля за движением ориентатора в скважине и установкой его в нужном положении по глубине против входа бокового ствола. При этом происходит непрерывное исследование обсадной колонны 6 с помощью электромагнитного датчика дефектоскопа 13, который определяет дефекты колонны и устанавливает их азимуты с помощью гироскопического инклинометра 14. Полученная информация регистрируется и обрабатывается в блоках электронной схемы управления 17, затем с помощью приемопередающей дипольной антенны 20 электромагнитные сигналы, модулированные полезной информацией от указанных датчиков, излучаются в породу 21, по которой достигают наземной приемопередающей антенны 34, далее обрабатываются блоком регистрации принятых сигналов 33 и воспроизводятся на экране ПЭВМ 30 наземного блока управления 22.
После достижения ориентатором расчетной глубины, соответствующей положению входного окна в боковой ствол 4, положение ориентатора относительно окна корректируется с помощью гибкой трубы по глубине по максимальному значению показаний электромагнитного датчика дефектоскопа 13 и совпадению показаний датчика гироскопического инклинометра 14 с данными значений азимута окна бокового ствола, которые отображаются на экране ПЭВМ 30.
После завершения ориентации корпуса ориентатора против входного окна в боковой ствол 4 скважины, по команде с поверхности, наземная антенна 34 при помощи цепи, включающей ПЭВМ 30, генератор управляющих команд 31 и усилитель управляющих команд 32, передает электромагнитные сигналы через породу на приемопередающую дипольную антенну 20, которые усиливаются в усилителе мощности управляющих команд 27, соединенном с усилителем мощности управляющего сигнала 29 и далее с приводным механизмом фиксации 10 корпуса ориентатора в нужном положении. Приводной механизм фиксации 10 приводит в действие электромеханический якорь 11, при этом выдвигаются стопорные плашки 12 и жестко фиксируют корпус ориентатора относительно стенки обсадной колонны 6.
Далее с поверхности подают команду через наземную антенну 34, передающую через породу электромагнитные сигналы приемопередающей дипольной антенне 20, которые усиливаются в усилителе мощности управляющих команд 27, соединенном с усилителем мощности управляющего сигнала 28 механизмом 9, обеспечивающим поворот корпуса 7 на дискретный угол. Поворотный корпус 7 ориентатора начинает вращаться, при этом электромагнитный датчик дефектоскопа 13 осуществляет сканирование по периметру зоны окна бокового ствола скважины, передавая полученную информацию по электромагнитному каналу связи на поверхность. В момент достижения максимальных показаний, регистрируемых электромагнитным датчиком дефектоскопа 13, механизм 9 по команде с поверхности останавливается, что соответствует точной установке поворотного корпуса 7 против входа в боковой ствол скважины.
После завершения ориентации поворотного корпуса 7 приступают к спуску колтюбинга 1 под собственным весом в боковой ствол через стопорную муфту 2.
После завершения технологических операций в боковом стволе скважины, осуществляемых с помощью колтюбинга, последний извлекают до момента упора ограничительной муфты 8 в стопорную муфту 2. После чего с поверхности подают команду через наземную антенну 34, передающую через породу электромагнитные сигналы на приемопередающую дипольную антенну 20, которые усиливаются в усилителе мощности управляющих команд 27, соединенном с усилителем мощности управляющего сигнала 29, и передаются на приводной механизм фиксации 10 корпуса ориентатора в нужном положении по глубине и далее на электромеханический якорь 11, стопорные плашки 12 которого втягиваются и освобождают корпус ориентатора. После чего ориентатор с помощью колтюбинга 1 может транспортироваться на поверхность либо перемещаться к окну следующего бокового ствола с повторением вышеописанных операций.
Предлагаемое изобретение позволяет создать легкосъемный управляемый эксплуатационный ориентатор, обладающий возможностью оперативной доставки на необходимую глубину и точного направления гибкой трубы во входное отверстие бокового ствола скважины независимо от его глубины и азимута, что обеспечивает простую, надежную и малозатратную доставку в него колтюбинга для выполнения различных технологических операций.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОРИЕНТАТОР ГИБКОЙ ТРУБЫ | 2009 |
|
RU2398949C1 |
| УСТРОЙСТВО ДЛЯ ПРОВОДКИ НАКЛОННО-НАПРАВЛЕННЫХ И ГОРИЗОНТАЛЬНЫХ СКВАЖИН | 2004 |
|
RU2278236C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ГИБКОЙ ТРУБЫ В БОКОВОЙ СТВОЛ СКВАЖИНЫ | 2010 |
|
RU2444603C2 |
| Способ геонавигации бурильного инструмента и управления его траекторией при проводке скважин в нужном направлении | 2015 |
|
RU2613364C1 |
| СПОСОБ ПОВЫШЕНИЯ НЕФТЕОТДАЧИ ПЛАСТОВ И ИНТЕНСИФИКАЦИИ ДОБЫЧИ НЕФТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2703064C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ПРОЦЕССОМ ОДНОВРЕМЕННО-РАЗДЕЛЬНОЙ ЭКСПЛУАТАЦИИ МНОГОПЛАСТОВЫХ ОБСАЖЕННЫХ СКВАЖИН (ВАРИАНТЫ) И ИСПОЛНИТЕЛЬНЫЙ МОДУЛЬ В СОСТАВЕ УСТРОЙСТВА (ВАРИАНТЫ) | 2010 |
|
RU2475643C2 |
| СПОСОБ ДОСТАВКИ ОБОРУДОВАНИЯ НА КОЛТЮБИНГОВОЙ ТРУБЕ В ЗАДАННЫЙ ИНТЕРВАЛ МНОГОСТВОЛЬНОЙ ДОБЫВАЮЩЕЙ СКВАЖИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2449107C2 |
| ОРИЕНТАТОР ГИБКОЙ ТРУБЫ | 2007 |
|
RU2355862C2 |
| Устройство оперативного исследования нефтяных и газовых скважин | 2021 |
|
RU2771093C1 |
| Способ строительства многозабойной скважины в неустойчивых пластах-коллекторах | 2024 |
|
RU2825795C1 |
Изобретение относится к области бурения скважин и может быть использовано в качестве средства для ориентации и доставки гибкой трубы в боковые стволы скважин при ремонте многоствольных скважин и проведении различных технологических операций. Устройство включает поворотный корпус, снабженный направляющим элементом, обеспечивающим прохождение гибкой трубы в боковой ствол скважины, приводной механизм, обеспечивающий поворот корпуса на дискретный угол, приводной механизм фиксации поворотного корпуса в нужном положении и содержит приборы контроля за его движением в скважине и установкой в нужном положении, электронную функциональную схему с автономным блоком питания и элементами для беспроводной электромагнитной двусторонней связи по горной породе с наземным блоком управления. Устройство подвешено на гибкой трубе при помощи стопорной муфты, закрепленной на поворотном корпусе и обеспечивающей прохождение гибкой трубы в боковой ствол скважины, при этом гибкая труба снабжена ограничительной муфтой, установленной с возможностью упора в стопорную муфту. Приводной механизм фиксации поворотного корпуса в нужном положении по глубине выполнен в виде электромеханического якоря с выдвигающимися стопорными плашками. Приборы контроля за движением устройства в скважине и установкой в нужном положении включают электромагнитный датчик дефектоскопа, установленный на поворотном корпусе, и гироскопический инклинометр. Беспроводная электромагнитная двусторонняя связь с наземным блоком управления содержит приемопередатчик и дипольный излучатель электромагнитных волн, управляемые электронной функциональной схемой. Обеспечивается упрощение технологии ориентации и доставки гибкой трубы в боковой ствол скважины и снижение трудозатрат. 3 ил.
Устройство для ориентации и доставки гибкой трубы в боковой ствол скважины, включающее поворотный корпус, снабженный направляющим элементом, обеспечивающим прохождение гибкой трубы в боковой ствол скважины, приводной механизм, обеспечивающий поворот корпуса на дискретный угол, приводной механизм фиксации поворотного корпуса в нужном положении и содержащее приборы контроля за его движением в скважине и установкой в нужном положении, электронную функциональную схему с автономным блоком питания и элементами для беспроводной электромагнитной двусторонней связи по горной породе с наземным блоком управления, отличающееся тем, что устройство подвешено на гибкой трубе при помощи стопорной муфты, закрепленной на поворотном корпусе и обеспечивающей прохождение гибкой трубы в боковой ствол скважины, при этом гибкая труба снабжена ограничительной муфтой, установленной с возможностью упора в стопорную муфту, приводной механизм фиксации поворотного корпуса в нужном положении по глубине выполнен в виде электромеханического якоря с выдвигающимися стопорными плашками, а приборы контроля за движением устройства в скважине и установкой в нужном положении включают электромагнитный датчик дефектоскопа, установленный на поворотном корпусе, и гироскопический инклинометр, кроме того, беспроводная электромагнитная двусторонняя связь с наземным блоком управления содержит приемопередатчик и дипольный излучатель электромагнитных волн, управляемые электронной функциональной схемой.

