Настоящее изобретение относится к способу определения тормозного момента, соответствующему способу для выработки тормозного сигнала, который использует тормозной момент, а также к устройству для определения тормозного момента и устройству для выдачи тормозного сигнала на тормозную систему для рельсового транспортного средства.
При эксплуатации тормозных систем рельсовых транспортных средств условия трения между колесом или колесной парой и рельсом или между тормозным диском и приданной тормозному диску тормозной накладкой подчас существенно колеблются в зависимости от погодных условий, температуры окружающей среды, состояния износа и профиля нагрузки. Если теперь необходимо регулирование тормозного момента, действующего на колесную пару рельсового транспортного средства, то в этом случае необходимо измерение с достаточной точностью тормозного момента, выработанного суппортом дискового тормозного элементам тормозной системы. Создаваемый на тормозном диске тормозной момент зависит, однако, от различных факторов, например, усилия прижима между тормозными обкладками и тормозным диском, величины трения между тормозной обкладкой и тормозным диском или радиуса трения, который представляет расстояние вытекающей силы трения от оси колесной пары.
Поскольку как локальное удельное давление между тормозной обкладкой и тормозным диском, так и величина трения тормозной обкладки на тормозном диске зависят от большого числа (частично локально весьма различных факторов), радиус трения также не является фиксированной, неизменной величиной, которая необходима, однако, для регулирования подлежащего приложению тормозного момента. Более того, при поочередно следующих торможениях происходят колебания радиуса трения, которыми не следует пренебрегать. В качестве причин можно рассматривать, например, различные исходные температуры тормозного диска и тормозной обкладки, различную исходную скорость, изменяющийся вид рабочей поверхности тормозной обкладки вследствие термических деформаций и/или износа тормозного диска и тормозной обкладки.
Воздействующий на тормозной диск тормозной момент в целом соответствует продукту из силы нажима тормозной обкладки на тормозной диск, величины трения между тормозной обкладкой и тормозным диском и фактического (подчас быстро изменяющегося) радиуса трения.
При проведении теперь измерения окружного усилия, которое соответствует действующей на тормозной диск силе трения, и при предпосылке неизменности радиуса трения тормозной момент может быть определен лишь относительно неточно.
В документе WO 2009/118350 А2 описано, как один или несколько сенсоров расположены на блоке суппорта дискового тормозного элемента с целью измерения силы трения между обкладкой и тормозным диском. В случае увеличении радиуса трения при неизменной силе трения, в реальности тормозной момент возрастает, в то время как измерение силы трения не регистрирует изменения силы трения. В случае использования лишь одного сенсора может быть даже определено уменьшение силы трения и, следовательно, уменьшение тормозного момента, что привело бы в цепи регулирования к «корректировке» в ошибочном направлении. С помощью описанного в документе WO 2009/118350 А2 способа действий невозможен высокоточный расчет силы замедления на транспортном средстве.
В документе WO 2010/069520 описан способ регулирования тормозной силы или тормозного момента.
В документе ЕР 0777598 В1 описан блок суппорта дискового тормозного механизма для дисковых тормозов транспортных средств, в частности рельсовых транспортных средств, причем используют эксцентриковый редуктор.
Задачей настоящего изобретения является создания возможности улучшенного определения тормозного момента и, таким образом, управлением тормозной силой с высокой точностью.
Эту задачу решают с помощью способа определения тормозного момента тормозной системы рельсового транспортного средства, способа выдачи тормозного сигнала для тормозной силы в тормозной системе для рельсового транспортного средства, устройства определения тормозного момента в тормозной системе для рельсового транспортного средства, а также устройства для выдачи тормозного сигнала для тормозной силы тормозной системы для рельсового транспортного средства в соответствии с независимыми главными пунктами формулы изобретения. Предпочтительные усовершенствования раскрыты в зависимых пунктах формулы и в описании.
Представленная здесь концепция создает способ определения тормозного момента тормозной системы для рельсового транспортного средства, причем приданная, по меньшей мере, одному колесу или, по меньшей мере, одной колесной парне тормозная система для выработки тормозной силы по тормозному сигналу содержит, по меньшей мере, один тормозной диск, по меньшей мере, одну взаимодействующую с тормозным диском тормозную обкладку, а также один соединенный с тормозной обкладкой суппорт дискового тормозного механизма, а также корпус тормоза и/или консоль, причем суппорт дискового тормозного механизма с корпусом тормоза укреплен в, по меньшей мере, одном месте крепления и одном втором месте крепления, причем второе место крепления находится на заранее определенном расстоянии крепления от первого места крепления, причем на тормозной системе и/или на корпусе тормоза, и/или между корпусом тормоза и консолью расположены один первый сенсор для выработки первого измерительного сигнала и, по меньшей мере, один второй сенсор для выработки второго измерительного сигнала, причем первый измерительный сигнал и второй измерительный сигнал характеризуют соответственно силу, в частности, усилие на опоре или выведенную из него величину. Способ включает следующие этапы:
ввод первого измерительного сигнала и второго измерительного сигнала; и
определение тормозного момента с использованием установочного размера, расстояния между местами крепления, а также первого измерительного сигнала и второго измерительного сигнала, причем установочный размер соответствует расстоянию между одной осью вращения тормозного диска и первым местом крепления.
Для замедления или торможения рельсовые транспортные средства содержат, по меньшей мере, один тормоз. Под рельсовым транспортным средством можно понимать в целом привязанное к колее транспортное средство, например, локомотив, моторный вагон, трамвай, транспортное средство метро, вагон, например, пассажирский и/или грузовой. Тормоз может воздействовать на один тормозной диск колеса или колесной пары. При этом тормоз может находиться в рабочей связи с одним колесом, одной колесной парой или большим количеством колес. Для упрощения описания и достижения большей понятности написанного, в последующем представленная здесь концепция описана на основании лишь одного колеса, даже если приведенная здесь концепция может быть исполнена для нескольких колес или одной колесной пары или нескольких колесных пар. Тормоз может состоять из большого количества конструктивных частей или элементов, в частности, тормоз может содержать один тормозной диск, по меньшей мере, одну взаимодействующую с тормозным диском тормозную обкладку, а также двигатель. Суппорт дискового тормозного механизма может быть соединен с возможностью поворота с консолью с помощью двух мест крепления, причем два места крепления расположены на расстоянии друг от друга. Тормозной диск содержит ось вращения, которая расположена на расстоянии от (ближнего) первого из двух мест крепления, причем это расстояние может быть обозначено как установочный размер. При этом под установочным размером можно понимать горизонтальное расстояние относительно встраивания. Консоль может быть жестко соединена с шасси рельсового транспортного средства. Срабатывание тормоза может производиться соответственно по тормозному сигналу. Тормозной сигнал может представлять собой сигнал запроса торможения. При срабатывании тормоза фрикционный элемент тормоза, например тормозная обкладка, может противодействовать окружному усилию колеса, которое действует в окружном направлении колеса или направлении движения колеса рельсового транспортного средства. Таким образом, тормозной момент может быть выработан тормозной обкладкой на тормозном диске и, тем самым, на колесе.
Противодействующая окружному усилию колеса сила может обусловить деформацию, по меньшей мере, одного тормозного элемента. При срабатывании тормоза тормозная обкладка, которая через суппорт дискового тормозного механизма активно соединена с двигателем, может прижиматься к тормозному диску. Действующая между тормозным диском и тормозной обкладкой сила трения может с этой целью обеспечивать равновесие сил в суппорте дискового тормозного механизма и на двух креплениях суппорта дискового тормозного механизма. В результате этого происходит деформация суппорта дискового тормозного механизма. На суппорте дискового тормозного механизма расположены один первый сенсор и один второй сенсор. Первый сенсор может вырабатывать первый измерительный сигнал, который характеризует одну первую силу, одно первое усилие на опоре в первом месте крепления или выведенную из них величину. В дополнение второй сенсор может вырабатывать второй измерительный сигнал, который характеризует одну вторую силу, одно второе усилие на опоре во втором месте крепления или выведенную из них величину. В случае первого сенсора или альтернативно, по меньшей мере, второго сенсора речь может идти об измерительном болте или альтернативно об измерительном элементе.
Представленная здесь концепция базируется на знании того, что за счет известного геометрического расположения определенных сенсоров и их типов подвешивания в совокупности с фактически измеренными сенсорами величинами можно с весьма высокой точностью определить тормозной момент. Этот тормозной момент может быть также весьма точно определен во время движения, даже если, например, в результате изменения действия тормозной силы возможно локальное изменение положения сенсоров относительно подвижных частей, таких как ось колеса или тормозной диск. Например, при использовании представленной здесь концепции может быть определен радиус трения. На - теоретическую - точку приложения силы тормозной обкладки к тормозному диску могут оказывать влияние внешние воздействия или влияния окружающей среды. Радиус трения может быть отображен также посредством изменения расстояния между точкой приложения силы тормозной обкладки к тормозной колодке и осью колеса, или вытекающей точкой приложения силы, на основании действия рычага при изменении тормозного момента, воздействующего со стороны тормоза на колесо. Если теперь возможно высокоточное определение тормозного момента, может быть также произведена весьма прецизионная подрегулировка тормозного момента или силы, которая должна воздействовать на дисковый тормоз в процессе движения рельсового транспортного средства.
Таким образом, представленная здесь концепция обеспечивает преимущество, в соответствии с которым за счет использования геометрических взаимосвязей и ограниченного количества простых в изготовлении и монтаже сенсоров возможно определение с высокой точностью фактически воздействующего на колесо тормозного момента и этот тормозной момент можно использовать для весьма прецизионного управления тормозом. За счет этого может быть достигнуто предпочтительно весьма точное и дозированное торможение рельсового транспортного средства, которое было бы невозможным без использования представленной здесь концепции.
Благоприятным также является случай, когда в одной форме исполнения настоящего изобретения первый измерительный сигнал характеризует приданное первому месту крепления одно первое усилие на опоре, а второй измерительный сигнал характеризует приданное второму месту крепление одно второе усилие на опоре. Под усилием на опоре можно понимать силу, которая воздействует со стороны суппорта дискового тормозного механизма на крепление, расположенное в определенном месте крепления. В двух местах крепления, которыми суппорт дискового тормозного механизма соединен с консолью, с помощью соответственно одного из болтов измерения силы суппорт дискового тормозного механизма может быть соединен с консолью. При срабатывании тормоза два болта измерения силы могут вырабатывать каждый измерительный сигнал, который характеризует усилие на опоре. Такая форма исполнения настоящего изобретения создает то преимущество, что за счет точного знания обоих усилий на опоре в совокупности с заранее известным расстоянием между двумя местами крепления за счет использования механических взаимосвязей, в частности, закона рычага, можно сделать вывод о тормозном моменте, который воздействует на колесо со стороны тормозной системы.
В соответствии с одной формой исполнения настоящего изобретения первый измерительный сигнал и второй измерительный сигнал соответственно характеризуют деформацию тормозной системы. Под деформацией тормозной системы можно понимать деформацию суппорта дискового тормозного механизма или других тормозных элементов. Под деформацией тормозной системы можно понимать изгибание тормозной системы или ее части, которое обусловлено силой, которая возникает в результате вращения тормозного диска с прижатой к нему тормозной обкладкой. Таким образом, при срабатывании тормоза сила трения, которая действует между тормозным диском и тормозной обкладкой, может деформировать тормозную систему. Соответствующие сенсоры, позиции расположения которых в тормозной системе являются известными, могут измерять в двух позициях состояние деформации тормозной системы и одновременно или альтернативно измерять напряжение в тормозной системе и выдавать сигнал, который характеризует деформацию тормозной системы. В одной форме исполнения на суппорте дискового тормозного механизма тормозной системы может быть расположен, по меньшей мере, один измерительный элемент для выработки первого и/или второго измерительных сигналов. В одной форме исполнения может производиться определение усилия зажима. Одна форма исполнения нестоящего изобретения обеспечивает то преимущество, что использование заранее известной упругости или жесткости тормозной системы, суппорта дискового тормозного механизма или одного другого тормозного элемента может дополнительно использоваться для определения тормозного момента. За счет этого посредством использования одного (дополнительного) следующего параметра достигается весьма высокая точность при определении тормозного момента.
Далее, также на этапе определения можно определять силу трения с использованием первого измерительного сигнала и второго измерительного сигнала. Также благоприятен случай, когда на этапе определения с использованием первого измерительного сигнала и второго измерительного сигнала определяют силу прижима тормозной обкладки к тормозному диску, в частности, если тормозной диск не вращается, и в состоянии покоя не происходит передачи силы трения. Если измерительные сигналы характеризуют каждый усилие на опоре, то, например, первый и второй измерительные сигналы могут быть суммированы с целью получения величины, которая характеризует силу трения. Например, с помощью такого способа действий можно весьма несложным образом определить из суммы обоих измеренных усилий на опоре силу трения, которая возникает при торможении на обоих креплениях тормозной обкладки, в частности, с учетом знака. При этом знак определенной силы трения может зависеть в этом случае от направления вращения. Такая форма исполнения настоящего изобретения обеспечивает то преимущество, что можно очень точно и несложным в техническом отношении образом определить силу трения, которая ведет к торможению колеса. Полученную таким образом силу трения можно затем весьма несложным образом использовать с использованием механических закономерностей для определения тормозного момента.
Благоприятен также случай, если в соответствии с одной формой исполнения настоящего изобретения на этапе определения определяют радиус трения с использованием установочного размера, расстояния между креплениями, а также первого измерительного сигнала и второго измерительного сигнала. Установочный размер и расстояние между опорами известны из конструкции тормозной системы и могут рассматриваться как неизменные. По этой причине настоящее изобретение обеспечивает то преимущество, что также за счет использования механических закономерностей тормозной момент может быть определен весьма несложным с технической точки зрения образом. Например, может быть образован коэффициент из одного измерительного сигнала, в частности, второго измерительного сигнала, и суммы первого измерительного сигнала и второго измерительного сигнала. Затем коэффициент может быть, например, умножен на расстояние между креплениями для получения расстояния между одним местом крепления, в частности, первым местом крепления, и вытекающей точкой приложения силы трения. Если вычесть из установочного размера расстояние, определенное из расстояния между креплениями и коэффициента из двух измерительных сигналов и сумму обоих измерительных сигналов, можно непосредственно определить величину радиуса трения. Так как расстояние между первым местом крепления суппорта дискового тормозного механизма и осью вращения тормозного диска (то есть установочный размер) и расстояние между креплениями точек подвешивания суппорта дискового тормозного механизма являются известными, то мгновенный эффективный радиус R трения можно рассчитать, например, с помощью следующего уравнения:
R=X0-A*F2/FR,
причем переменная R характеризует радиус трения, переменная А характеризует расстояние между креплениями, переменная Х0 характеризует установочный размер, переменная F2 характеризует второе усилие на опоре и переменная FR характеризует силу трения. Такого рода форма исполнения настоящего изобретения создает преимущество, в соответствии с которым за счет использования простой механической взаимосвязи может быть весьма точно определен радиус трения и за счет этого также тормозной момент.
В соответствии с одной формой исполнения на этапе ввода можно определить информацию об изменениях длины установочного размера и одновременно или альтернативно информацию об изменении позиции оси колеса в одном диапазоне допусков перпендикулярно направлению прохождения установочного размера, а на этапе определения можно определить крутящий момент и одновременно или альтернативно силу трения и одновременно или альтернативно радиус трения с использованием информации об изменении длины и одновременно или альтернативно информацию об изменении позиции. Под направлением прохождения установочного размера может пониматься направление измерения установочного размера. Под изменением позиции оси колеса в диапазоне допусков перпендикулярно направлению прохождения установочного размера можно понимать изменение позиции колеса в направлении, которое отличается от направления прохождения. Таким образом, в частности, под этим можно понимать вертикальное изменение позиции оси колеса, если направление прохождения простирается в горизонтальном направлении. То есть в основном параллельно прохождению рельсов, по которым движется рельсовое транспортное средство. Для обеспечения возможности ввода информации об изменении длины установочного размера и одновременно или альтернативно информации об изменении позиции оси колеса в диапазоне допусков перпендикулярно направлению прохождения установочного размера может быть введена, по меньшей мере, информация дополнительного сенсора, например, сенсора длины. С целью дальнейшего повышения точности при определении тормозного момента, в соответствии с такой формой исполнения настоящего изобретения предпочтительно учитывают относительные движения тормозного диска во время режима движения. Вследствие первичного подрессорирования между колесом или колесной парой и рамой поворотной тележки колесо или колесная пара в зависимости от состояния загрузки могут смещаться в вертикальном направлении относительно рамы. Дополнительно или альтернативно упругие осевые подшипники, например, с резиновыми амортизаторами, также допускают смещение в продольном направлении транспортного средства и в поперечном направлении. В результате этого происходит принудительное изменение позиции тормозного диска относительно суппорта дискового тормозного механизма. В расчете тормозного момента учет влияния этого осевого движения или осевых движений относительно суппорта дискового тормозного механизма может быть учтен, если известно относительное движение тормозного диска. Если на обоих осевых подшипниках движения колесной пары принимаются в одном, двух или всех трех направлениях, например, с помощью пригодных сенсоров положения, то для позиции тормозного диска на оси относительно несложным образом может быть рассчитано относительное движение. Для этого могут быть определены геометрические изменения вследствие смещения оси тормозного диска относительно первого места крепления и второго места крепления и учтено их воздействие на определение силы или момента.
Далее, с помощью представленной здесь концепции предложен способ вывода тормозного сигнала для тормозной силы на тормозную систему для рельсового транспортного средства, причем, приданная, по меньшей мере, одному колесу или, по меньшей мере, одной колесной паре тормозная система содержит для выработки тормозной силы применительно к тормозному сигналу, по меньшей мере, один тормозной диск, по меньшей мере, одну, взаимодействующую с тормозным диском тормозную обкладку, а также соединенный с тормозной обкладкой суппорт дискового тормозного механизма, причем суппорт дискового тормозного механизма с корпусом тормоза укреплен в, по меньшей мере, одном первом месте крепления и одном втором месте крепления, причем второе место крепления расположено на заранее определенном крепежном расстоянии от первого места крепления, причем на суппорте дискового тормозного механизма расположены один первый сенсор для выработки одного первого измерительного сигнала и один второй сенсор для выработки одного второго измерительного сигнала, причем первый измерительный сигнал и второй измерительный сигнал характеризуют каждый в целом одну силу, в частности, усилие на опоре, или выведенную из них величину. Способ выдачи тормозного сигнала для тормозного усилия тормозной системы рельсового транспортного средства включает в себя следующие этапы:
ввод тормозного момента, который был определен с использованием варианта представленного здесь способа определения тормозного момента тормозной системы рельсового транспортного средства, и
определение тормозной силы с использованием желаемого заданного тормозного момента и введенного тормозного момента с целью выдачи тормозного сигнала.
Также благоприятен случай, когда на этапе определения тормозную силу определяют с использованием силы трения. Такая дополнительная величина, как сила трения, может обеспечивать возможность надежного или альтернативно более быстрого по сравнению с возможностями прежних концепций регулирования тормозного момента, который должен прикладываться в процессе движения рельсового транспортного средства, или определения такой тормозной силы.
В одном дополнительном усовершенствовании указанного способа для выдачи тормозного сигнала на этапе определения может быть определена тормозная сила с использованием радиуса трения. За счет использования рычажного действия радиуса торможения возможно более быстрое или надежное определение тормозной силы, в частности, за счет этого возможно очень быстрое распознавание изменений радиуса торможения и его учет при определении фактически необходимой силы торможения.
Далее, представлено устройство для определения тормозного момента тормозной системы рельсового транспортного средства, причем тормозная система для выработки тормозного усилия по тормозному сигналу, приданная, по меньшей мере, одному колесу или, по меньшей мере, одной колесной паре, содержит, по меньшей мере, один тормозной диск, по меньшей мере, одну взаимодействующую с тормозным диском тормозную обкладку, а также один соединенный с тормозной обкладкой суппорт дискового тормозного механизма, причем суппорт дискового тормозного механизма укреплен через корпус тормоза в, по меньшей мере, одном первом месте крепления и одном втором месте крепления, причем второе место крепления расположено на заранее определенном крепежном расстоянии от первого места крепления, причем на корпусе тормоза расположены один первый сенсор для выработки первого измерительного сигнала и один второй сенсор для выработки второго измерительного сигнала, причем первый измерительный сигнал и второй измерительный сигнал характеризуют соответственно силу, в частности, усилие на опоре, или выведенную из них величину, причем устройство предусматривает следующие этапы:
устройство сопряжения для ввода первого измерительного сигнала и второго измерительного сигнала; и
устройство для определения тормозного момента с использованием установочного размера, расстояния между креплениями, а также первого измерительного сигнала и второго измерительного сигнала, причем установочный размер соответствует расстоянию между осью вращения тормозного диска и первым местом крепления.
Таким образом, в данном случае представлено устройство для определения тормозного момента тормозной системы рельсового транспортного средства, которое выполнено для выполнения или преобразования этапов способа определения тормозного момента тормозной системы рельсового транспортного средства в соответствующих устройствах сопряжения и/или устройствах. Также за счет этого варианта исполнения изобретения в форме устройства возможно быстрое и эффективное решение задачи, положенной в основу изобретения.
Далее, представлено устройство для выдачи тормозного сигнала для тормозной силы тормозной системы для рельсового транспортного средства, причем приданная, по меньшей мере, одному колесу или, по меньшей мере, одной колесной паре тормозная система для выработки тормозной силы по тормозному сигналу содержит, по меньшей мере, один тормозной диск, по меньшей мере, одну, взаимодействующую с тормозным диском тормозную обкладку, а также соединенный с тормозной обкладкой суппорт дискового тормозного механизма, причем суппорт дискового тормозного механизма укреплен через корпус тормоза в, по меньшей мере, одном первом месте крепления и одном втором месте крепления, причем второе место крепление расположено на заранее определенном крепежном расстоянии от первого места крепления, причем на суппорте дискового тормозного механизма расположены один первый сенсор для выработки одного первого измерительного сигнала и один второй сенсор для выработки одного второго измерительного сигнала, причем первый измерительный сигнал и второй измерительный сигнал характеризуют каждый одну силу, в частности, усилие на опоре, или выведенную из них величину, причем устройство содержит:
устройство сопряжения для ввода тормозного момента; и
устройство для определения тормозной силы с использованием заранее определенного заданного тормозного момента и введенного тормозного момента для выдачи тормозного сигнала.
Положенная в основу задача может быть быстро и эффективно решена за счет одной формы исполнения изобретения в форме устройства для выдачи тормозного сигнала на тормозной системе для рельсового транспортного средства. При этом на тормозной системе для рельсового транспортного средства выполнено устройство для управления тормозным сигналом для тормозной силы для осуществления или преобразования этапов способа управления тормозным сигналом для тормозной силы на тормозной системе для рельсового транспортного средства в соответствующих устройствах сопряжения и/или устройствах. Под устройством в данном случае может пониматься электрическое устройство, которое осуществляет ввод сигналов сенсоров, их обработку и в зависимости от этого выдает сигналы управления и/или информационные сигналы. Устройство может содержать устройство сопряжения, которое может быть выполнено в соответствии с аппаратным и/или программным обеспечением. При исполнении в соответствии с аппаратным обеспечением устройства могут являться, например, частью так называемой системы ASICs (центр сбора информации от всех источников), которая выполняет самые различные функции устройства управления. Однако, возможно также, что устройства сопряжения представляют собой собственные интегрированные схемы или, по меньшей мере, частично состоят из этих конструктивных элементов. При исполнении в соответствии с программным обеспечением устройства сопряжения могут представлять собой модули программного обеспечения, которые присутствуют, например, на микроконтроллере наряду с другими модулями программного обеспечении.
Преимущественным является также продукт компьютерной программы с программным кодом, который может быть записан на носитель, который может считываться машиной, например, память на базе полупроводников, жесткий диск или оптическое запоминающее устройство, и применяется для осуществления способа в соответствии с одной из описанных выше формой исполнения, если программный код выполняют на компьютере или устройстве. Таким образом, возможно преобразование определенных в программном коде этапов способа устройствами компьютера или устройством.
Изобретения поясняются чертежами, на которых представлено следующее:
фиг. 1 - схематическое изображение на виде сбоку тормозной системы для рельсового транспортного средства согласно примеру исполнения настоящего изобретения;
фиг. 2 - схематическое изображение на виде сверху тормозной системы для рельсового транспортного средства согласно примеру исполнения настоящего изобретения;
фиг. 3а-3с - схематическое изображение тормозной системы для рельсового транспортного средства согласно примеру исполнения;
фиг. 4а-4b - схематическое изображение тормозной системы для рельсового транспортного средства согласно примеру исполнения настоящего изобретения;
фиг. 5 - схематическое изображение тормозной системы с потенциальным движением оси тормозного диска к консоли для рельсового транспортного средства согласно примеру исполнения настоящего изобретения;
фиг. 6 - схема последовательности операций способа определения тормозного момента на тормозной системе для рельсового транспортного средства согласно примеру исполнения настоящего изобретения;
фиг. 7 - схема последовательности операций способа управления тормозным сигналом для тормозной силы на тормозной системе рельсового транспортного средства согласно примеру исполнения настоящего изобретения;
В последующем описании предпочтительных примеров исполнения настоящего изобретения для изображенных на различных чертежах и одинаково функционирующих элементов используют одинаковые или аналогичные ссылочные обозначения, причем повторное описание этих элементов отсутствует.
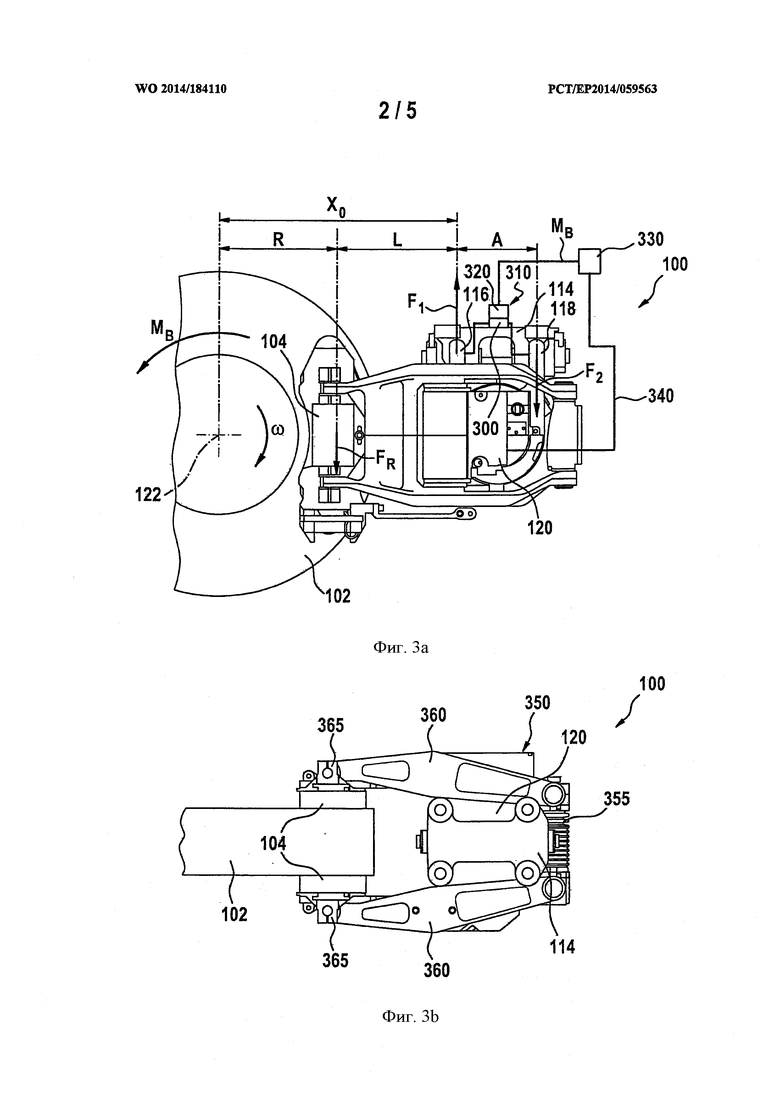
Фиг. 1 показывает схематическое изображение в виде сбоку тормозной системы 100 для рельсового транспортного средства для использования в одном примере исполнения настоящего изобретения. Тормозная система 100 содержит тормозной диск 102, воздействующую на тормозной диск 102 или прижимаемую к нему тормозную обкладку 104, а также суппорт 106 дискового тормозного механизма. Тормозная обкладка 104 укреплена на одном конце суппорта 196 дискового тормозного механизма. Суппорт 106 дискового тормозного механизма укреплен с корпусом 108 в двух местах 110, 112 крепления на консоли 114. В двух местах 110, 112 крепления расположено по одному болту 116, 118 для определения действующих на опоры сил. На фиг. 1 показан не видимый непосредственно и изображенный штриховкой тормозной цилиндр 120, с помощью которого суппорт 106 дискового тормозного механизма эффективно, то есть с передачей силы соединен с корпусом 108 тормоза. Во время движения рельсового транспортного средства, на котором укреплена тормозная система 100, тормозной диск 102 вращается вокруг оси 122 вращения. Тормозная обкладка 104 расположена сбоку от тормозного диска 102, то есть тормозная обкладка 104 расположена в диапазоне допусков параллельно одной боковой поверхности тормозного диска 102. Поверхность тормозной обкладки 104 покрывает частичную область боковой поверхности тормозного диска 102. Суппорт 106 дискового тормозного механизма имеет в примере исполнения U-образную форму, причем оба конца соединены с тормозной обкладкой 104, а на противолежащем тормозной обкладке 104 конце расположен тормозной цилиндр 120 или описанный более подробно ниже исполнительный элемент с нажимными штангами для передачи силы от тормозного цилиндра 120 на суппорт 196 дискового тормозного механизма.
В изображенном на фиг. 1 первом месте 110 крепления корпус 108 тормоза соединен с помощью одного первого болта 116 с консолью 114. Аналогично этому во втором месте 112 крепления корпус 108 тормоза соединен с консолью 114 с помощью одного второго болта 118. В случае болтов 116 и 118 речь идет соответственно об измерительных болтах, которые соответственно выполнены для измерения возникающих на соответствующих местах 110, 112 усилий на опоре и выдаче соответствующего второго измерительного сигнала в соответствии с первым измерительным сигналом. Измерительный болт 116, 118 может быть обозначен также как измерительный элемент 116, 118. В одном примере исполнения два болта 116, 118 могут быть выполнены в качестве одного проходного болта или проходного измерительного болта. Проходной болт изображен, например, на фиг. 4.
Срабатывая по тормозному сигналу, тормозная обкладка 104 в соответствии с последующим детальным описанием прижимается через передачу тормозного цилиндра 120 к тормозному диску 102. При этом тормозной диск 102 может вращаться с угловой скоростью ω. В результате этого в эффективном месте 124 между тормозной обкладкой 104 и тормозным диском 102 тормозная обкладка 104 прижимается с тормозной силой FB к тормозному диску 102. Эффективное место 124 расположено на удалении R от оси 122 вращения тормозного диска 102, которое соответствует радиусу R торможения. Расстояние Х0 между осью 122 вращения и первым местом 110 крепления обозначено при этом как установочный размер Х0. Расстояние между первым местом 110 крепления и вторым местом 112 крепления обозначено как крепежное расстояние А. За счет вращения тормозного диска 102 при вращении колеса, на котором укреплен тормозной диск 102, в месте 124 воздействия возникает пропорциональная тормозной силе FB сила FR трения, которую можно рассматривать как ориентированную в основном перпендикулярно направлению прохождения суппорта 106 дискового тормозного механизма между тормозными обкладками 104 и тормозным цилиндром 120. На основании силы FR трения или тормозной силы FB и радиуса R трения можно определить действующий на тормозной диск 102 тормозной момент MB. Для такого определения тормозного момента MB используют тот факт, что в результате этой силы FR трения или тормозной силы FB возникает эффект рычага суппорта 106 дискового тормозного механизма, который обуславливает воздействующее на первое место 110 крепления усилие F1 на опоре и воздействующее во втором месте 112 крепления второе усилие F2 на опоре, которые могут быть определены с помощью измерительного элемента 116 и 118.
Фиг. 2 показывает простое схематическое изображение тормозной системы 100 для рельсового транспортного средства для использования в одном примере исполнения настоящего изобретения. В случае изображенной на фиг. 2 тормозной системы 100 речь может идти, таким образом, об описанной на фиг. 1 тормозной системе 100, причем она схематически изображена на фиг. 2 на виде сверху. Блок суппорта дискового тормозного механизма содержит два клещевых рычага 106, одни концы которых шарнирно укреплены на тормозной колодке 104, и другие концы которых укреплены с помощью шарнира на исполнительном механизме 225 с нажимными штангами, который простирается между ними. Центральные области клещевых рычагов 106 присоединены к корпусу 108 тормоза, причем место присоединения одного клещевого рычага 106 выполнено в качестве простой вращающейся опоры 226. Место присоединения другого клещевого рычага 106 выполнено в качестве эксцентрикового механизма 227, который может приводиться в действие укрепленным в корпусе тормозным цилиндром 120 через плечо 228 кривошипа в направлении сближения обоих клещевых рычагов 106. Эксцентриковый механизм 227 содержит вал, который может вращаться в корпусе вокруг одной оси и который с эксцентричностью, направленной обращенной от тормозного диска 102 наклонно вниз-наружу, несет цапфу с осью, на которой укреплен клещевой рычаг 106. Эксцентриковый механизм 227 обеспечивает высокое силовое передаточное отношение при относительно коротких клещевых рычагах 106.
В одном примере исполнения тормозной цилиндр 120 или альтернативно корпус тормозного цилиндра 120 могут быть соединены с корпусом 108 тормоза.
Следующие фиг. 3а, 3b и 3с показывают различные виды одного примера исполнения для тормозной системы 100 для рельсового транспортного средства. При этом тормозная система 100, которая изображена на фиг. 3а на виде сбоку с указанием обозначений расстояний между отдельными элементами, показана на фиг. 3с в виде сверху. Фиг. 3 с показывает вид в сечении частичной области тормозной системы 100, из которого делаются понятными позиции мест крепления с первым измерительным болтом и вторым измерительным болтом.
Фиг. 3 показывает изображение тормозной системы 100 для рельсового транспортного средства для использования в одном примере исполнения настоящего изобретения. При этом еще раз воспроизведены уже поясненные более подробно со ссылкой на фиг. 1 элементы и компоненты, причем теперь с целью лучшего пояснения назначения тормозного момента MB внесены также расстояния или обозначения расстояний некоторых из элементов тормозной системы 100. При этом первый измерительный сигнал, который выработан первым измерительным болтом 116, и второй измерительный сигнал, выработанный вторым измерительным болтом 118, вводят с целью записи с помощью устройства 300 сопряжения в изображенное на фиг. 3а устройство 310. Первый и второй измерительные сигналы могут быть в этом случае переданы устройством 300 сопряжения в устройство 320 для определения тормозного момента MB, в котором, например, в соответствии с описанной ниже более подробно процедурой определяют тормозной момент MB. В завершение определенный тормозной момент MB может быть передан, например, на устройство 330 для выдачи тормозного сигнала 340, который управляет замедлением или сокращением тормозного цилиндра, чтобы изменить (фактически воздействующий на тормозной диск 102) тормозной момент MB таким образом, чтобы он, например, соответствовал желаемому заданному тормозному моменту. За счет этого весьма несложным с технической точки зрения образом реализовано регулирование тормозной силы FB, прикладываемой от тормозных обкладок 104 к тормозному диску 102. Устройство 310 определения тормозного момента MB и устройство 330 выдачи тормозного сигнала 340 изображены или расположены на фиг. 3а лишь в качестве примера. Поэтому эти устройства 310 и 330 не должны быть действительно смонтированы в изображенных на фиг. 3а позициях и могут быть смонтированы в любом месте в тормозной системе 100 или в целом в рельсовом транспортном средстве.
Фиг. 3b показывает изображение на виде сверху тормозной системы 100, изображенной на фиг. 3а. В изображении по фиг. 3b, в частности, виден двигатель 350 тормозного цилиндра 120, который вырабатывает силу приведения в действие, которая с помощью рычажной передачи воздействует на один клещевой рычаг 360 и на тормозную обкладку 104. На клещевом рычаге 360 эта сила через исполнительный механизм 355 с нажимными штангами передается на второй клещевой рычаг 360, который приводит вторую тормозную обкладку 104 в состояние контакта с тормозным диском. Таким образом, теперь сила FBet преобразуется в тормозную силу FB, в то время как расположенные на держателях обкладок тормозные обкладки 104 прижимаются к тормозному диску 102.
Фиг. 3 с показывает в сечении вид одной частичной области тормозной системы 100. На фиг. 3с видно положение первого измерительного болта 116 и второго измерительного болта 188, которые расположены в точке крепления в первом месте 110 крепления или втором месте 112 крепления корпуса 370 тормоза на консоли 114. В нижней частичной области изображения в сечении из фиг. 3с изображен двигатель 350 тормозного цилиндра 120.
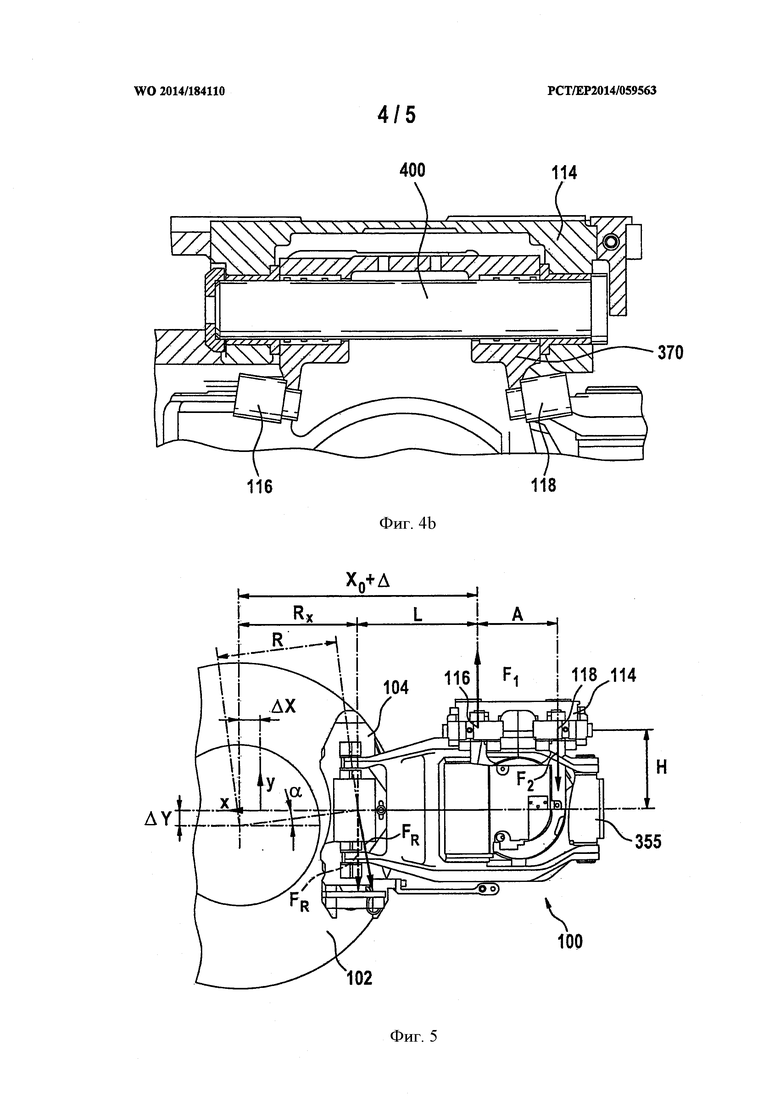
Фиг. 4 показывает изображение в сечении части тормозной системы 100 в соответствии с одним следующим примером настоящего изобретения. При этом видно, что соединение между консолью 114 и суппортом 106 дискового тормозного механизма реализовано с помощью подвесного болта 400, причем подвесной болт 400 проведен через отверстие корпуса 370 двигателя 350. Первый измерительный элемент 116 и второй измерительный элемент 118 встроены каждый между корпусом 370 двигателя 350 и подвеской 400, так что они могут измерять деформацию, передаваемую от соответственно граничащего клещевого рычага 360 через корпус 370. Деформация пропорционально - приложенной - силе.
Фиг. 4b показывает особо важную область из фиг. 4а в увеличенном масштабе.
Для определения тормозного момента, который во время торможения воздействует на тормозной диск 102, в тормозной системе 100 или в точках подвешивания между соответственно клещевым рычагом 360 и корпусом 370 двигателя 350, могут быть, таким образом, расположены два сенсора 116 и 118 на заранее известном расстоянии А друг от друга. Сенсоры 116 или 118 могут быть расположены или позиционированы здесь таким образом, что возможно определение, с одной стороны, силы FR трения между тормозной обкладкой и тормозным диском и, с другой стороны, изгибающий момент, передающийся силой трения в суппорт дискового тормозного механизма. С помощью этих обеих величин изменения и известных размеров суппорта дискового тормозного механизма и поворотной тележки, например, консоли, в модуле 310 управления или определения может быть, тем самым, рассчитаны мгновенно присутствующий радиус R трения и вместе с определенной силой FR трения фактически действующий тормозной момент MB. Определенные в модуле 310 управления или определения величины или значения могут быть использованы модулем 330 регулирования для управления тормозной системой или для выдачи тормозного сигнала для регулирования приводного усилия FBet. Дополнительно или одновременно определенные величины или значения могут быть выведены на индикацию, в частности, для человека в рельсовом транспортном средстве. Выведенные на индикацию величины или значения могут поддерживать человека при управлении рельсовым транспортным средством.
В области подвески или подвесных болтов 400 корпус 370 двигателя 350 (компактные клещи) нагружен лишь собственным весом суппорта 106 дискового тормозного механизма и воздействием силы FR трения на тормозных обкладках 104. Если в этой области в двух местах производят измерение состояния напряжения или деформации, то можно однозначно определить передаваемую суппортом 106 дискового тормозного механизма нагрузку. При соответствующей калибровке сенсорной техники из измерения может быть определена сила FR трения и рассчитан важный для тормозного момента MB радиус R трения.
Блок суппорта дискового тормозного механизма или тормозная система укреплена с возможностью поворота, таким образом, с помощью обоих болтов 116 и 118 измерения силы в консоли 114. Консоль 114 жестко привинчена к раме поворотной тележки (рельсового) транспортного средства. Суппорт 106 дискового тормозного механизма подвешен с корпусом 108 в консоли 114 в двух местах крепления. Крепежные болты 116 или 118 выполнены в качестве отдельных болтов для измерения силы. При торможении возможно весьма точное измерение обоих возникающих усилий F1 и F2 на опорах. Тем самым, воздействующий на тормозной диск 102 тормозной момент MB можно определить в соответствии со следующей взаимосвязью:
MB=FR*R или
MB=FR*X0-F2*A
Фиг. 5 показывает изображение тормозной системы 100 с потенциальным движением оси тормозного диска относительно консоли 114 для рельсового транспортного средства для использования в одном примере настоящего изобретения. В случае тормозной системы 100 речь может идти об уже изображенной на фиг. 3а тормозной системе 100. При этом ось 122 вращения на фиг. 5 смещена по сравнению с осью 122 вращения, изображенной на фиг. 3а. За счет смещения оси 122 вращения относительно консоли 114 возникают новые геометрические взаимосвязи, которые также оказывают влияние на действующие в тормозной системе 100 силы.
Далее, представленная здесь концепция создает возможность дополнительного учета смещения оси во время торможения при определении тормозного момента. Для этого на фиг. 5 смещение оси колеса и, следовательно, центральной точки или точки вращения тормозного диска 102 изображено в вертикальном направлении ΔY и в продольном направлении транспортного средства. Если смещения или участки ΔХ и ΔY известны, то на основании известной геометрии и измеренной силы в местах крепления может быть рассчитан тормозной момент MB. Если указанный на фиг. 5 угол α приблизительно рассчитывают в среднем положении с использованием величины для RX (то есть доли компоненты радиуса в направлении X, то есть в направлении, параллельном прохождению рельсов), то тормозной момент может быть определен с относительно малой погрешностью с помощью простых (геометрических) уравнений.
В случае попытки определения точного тормозного момента с помощью сенсора 116 или 118, расположенных на удалении от места приложения силы, то есть места 124 трения между тормозной обкладкой 104 и тормозным диском 102, установлено, что колебания этого места 124 трения (в более реальном случае речь идет о плоскостном прохождении), то есть в конечном итоге, радиуса трения не могут быть определены с достаточной точностью. Если присутствует лишь одна величина силы, например, F1 или F2, то в числовом отношении невозможно вычислить точную величину для тормозного момента MB - остается одна неизвестная величина. За счет одновременного определения с помощью измерительной техники обеих сил F1 и F2 и их точно известного геометрического местоположения система уравнений для сил и момент полностью определена. Преимущество предложенной здесь концепции заключается, таким образом, в частности, в использовании двух расположенных (то есть эффективно соединенных) на расстоянии друг от друга сенсоров 116 или 118 деформации и силы, которые расположены с передачей силы на проводящих силу элементах тормоза, например, корпусе 370.
В качестве следующего преимущества предложенной здесь концепции можно отметить, что один из сенсоров 116 или 118 при соответствующем размещении может быть использован также для определения силы деформации, которая не проистекает из непосредственной, относящейся к торможению силы FR трения. Таким образом, при не вращающемся тормозном диске или не вращающейся колесной паре (то есть при нахождении транспортного средства в состоянии покоя) можно измерить приводное усилие (в смысле анализа корректной функции). Измерительные болты 116 и 118 могут быть при этом расположены в соответствии с изображенным на фиг. 3а или фиг 4а позиционированием, причем на этих фигурах показана также принципиальная тематика и, например, локализация сенсоров на тормозном диске рельсового транспортного средства для использования для измерения деформации, по меньшей мере, одного компонента тормозной системы 100. Измерение деформации в силовом потоке одной, нагруженной тормозным усилием FB конструктивной группы тормоза, определяет в расчетном исчислении измеренных сил F1 и F2 реакции точную, действующую в месте происхождения силу FR трения. При этом сенсоры 116 или 118 могут быть расположены или встроены на консоли 114, подвесном болте 400 и/или корпусе 370 тормоза, как это видно из фиг. 4а и 4b.
Фиг. 6 показывает схему последовательности операций способа 600 для определения тормозного момента в тормозной системе для рельсового транспортного средства. При этом тормозная система содержит, по меньшей мере, одну приданную одному колесу или, по меньшей мере, одной колесной паре тормозную систему для выработки тормозной силы по тормозному сигналу, по меньшей мере, один тормозной диск, по меньшей мере, одну взаимодействующую с тормозным диском тормозную обкладку, а также соединенный с тормозной обкладкой суппорт дискового тормозного механизма. Суппорт дискового тормозного механизма укреплен, по меньшей мере, в одном первом месте крепления и одном втором месте крепления, причем второе место крепления расположено на заранее определенном крепежном расстоянии от первого места крепления, причем на суппорте дискового тормозного механизма расположены один первый сенсор для выработки первого измерительного сигнала и второй сенсор для выработки второго измерительного сигнала, причем первый измерительный сигнал и второй измерительный сигнал соответственно характеризуют силу, в частности, усилие на опоре, или выведенную из них величину. Способ 600 содержит этап ввода 610 первого измерительного сигнала и второго измерительного сигнала. Далее, способ 600 содержит этап определения 620 тормозного момента с использованием установочного размера, крепежного расстояния, а также первого измерительного сигнала и второго измерительного сигнала, причем установочный размер соответствует расстоянию между осью вращения тормозного диска и первым местом крепления.
Фиг. 7 показывает схему последовательности операций способа 700 для выдачи тормозного сигнала для тормозной силы в тормозной системе для рельсового транспортного средства для использования в одном примере исполнения настоящего изобретения. При этом тормозная система содержит приданную, по меньшей мере, одному колесу или, по меньшей мере, одной колесной паре тормозную систему для выработки тормозной силы по тормозному сигналу, по меньшей мере, один тормозной диск, по меньшей мере, одну взаимодействующую с тормозным диском тормозную обкладку, а также соединенный с тормозной обкладкой суппорт дискового тормозного механизма. Суппорт дискового тормозного механизма укреплен, по меньшей мере, в одном первом месте крепления и одном втором месте крепления, причем второе место крепления расположено на заранее определенном крепежном расстоянии от первого места крепления, причем на суппорте дискового тормозного механизма расположены один первый сенсор для выработки первого измерительного сигнала и один второй сенсор для выработки второго измерительного сигнала, причем первый измерительный сигнал и второй измерительный сигнал характеризуют каждый силу, в частности, усилие на опоре или выведенную из них величину. Способ 700 содержит этап ввода 710 тормозного момента, который за счет исполнения одного варианта способа был предусмотрен для определения тормозного момента. Далее, способ 700 содержит этап определения 720 тормозной силы с использованием заранее определенного заданного тормозного момента и введенного тормозного момента с целью выдачи тормозного сигнала.
Описанные примеры исполнения выбраны лишь в качестве примера и могут комбинироваться друг с другом.



Группа изобретений относится к области рельсовых транспортных средств. Устройство для определения тормозного момента в тормозной системе рельсового транспортного средства содержит устройство сопряжения для ввода первого измерительного сигнала и второго измерительного сигнала и устройство для определения тормозного момента. Способ определения тормозного момента в тормозной системе рельсового транспортного средства содержит этапы ввода первого и второго измерительных сигналов и определение тормозного момента. Устройство для выдачи тормозного сигнала для тормозной силы в тормозной системе рельсового транспортного средства содержит одно устройство сопряжения для ввода тормозного момента, определенного устройством для определения тормозного момента и устройство для определения тормозной силы. Способ выдачи тормозного сигнала для тормозной силы в тормозной системе рельсового транспортного средства включает этапы ввода тормозного момента и определения тормозной силы. Достигается повышение точности определения тормозного момента. 4 н. и з.п. ф-лы, 10 ил.
1. Способ (600) определения тормозного момента (MB) в тормозной системе (100) для рельсового транспортного средства, причем приданная по меньшей мере одному колесу или по меньшей мере одной колесной паре тормозная система (100) содержит для создания тормозной силы (FB) по тормозному сигналу (340) по меньшей мер, один тормозной диск (102), по меньшей мере одну выполненную с возможностью взаимодействия с тормозным диском (102) тормозную обкладку (104), а также соединенный с тормозной обкладкой (104) суппорт (106) дискового тормозного механизма, а также корпус (108) тормоза и/или одну консоль (114), причем суппорт (106) дискового тормозного механизма с корпусом тормоза закреплен в по меньшей мере одном первом месте (110) крепления и одном втором месте (112) крепления, причем второе место (112) крепления расположено на заранее заданном крепежном расстоянии (А) от первого места (110) крепления, причем на тормозной системе (100) и/или на корпусе (108) тормоза и/или между корпусом (108) тормоза и консолью (114) расположены один первый сенсор (116) для выработки первого измерительного сигнала и по меньшей мере один второй сенсор (118) для выработки второго измерительного сигнала, причем первый измерительный сигнал и второй измерительный сигнал характеризуют каждый одну силу (F1, F2), в частности усилие на опоре, или выведенную из них величину, причем способ (600) содержит следующие этапы:
ввод (610) первого измерительного сигнала и второго измерительного сигнала и определение (620) тормозного момента (MB) с использованием установочного размера (Х0), крепежного расстояния (А), а также первого измерительного сигнала и второго измерительного сигнала, причем установочный размер (Х0) соответствует расстоянию между осью (122) вращения тормозного диска (102) и первым местом (110) крепления.
2. Способ (600) по п. 1, при котором на этапе ввода (610) вводят первый измерительный сигнал, который характеризует приданное первому месту (110) крепления первое усилие (F1) на опоре и при котором вводят второй измерительный сигнал, который характеризует приданное второму месту (112) крепления второе усилие (F2) на опоре.
3. Способ (600) по п. 1 или 2, при котором на этапе определения (620) с использованием первого измерительного сигнала и второго измерительного сигнала определяют силу (FR) трения.
4. Способ (600) по п. 1 или 2, при котором на этапе ввода (610) выполняют ввод первого и второго измерительных сигналов, причем первый измерительный сигнал и второй измерительный сигнал характеризуют каждый деформацию в тормозной системе (100).
5. Способ (600) по п. 4, при котором на этапе определения (620) с использованием первого измерительного сигнала и второго измерительного сигнала определяют силу прижима тормозной обкладки (104) к тормозному диску (102), в частности, если тормозной диск (102) не находится во вращении и в состоянии покоя отсутствует передача силы (FR) трения.
6. Способ (600) по п. 1 или 2, при котором на этапе определения с использованием установочного размера (Х0), крепежного расстояния (А), а также первого измерительного сигнала и второго измерительного сигнала определяют радиус (R) трения, в частности, причем радиус (R) трения характеризует расстояние между осью (122) вращения колеса и вытекающей точкой (124) воздействия тормозной обкладки (104) на тормозной диск (102).
7. Способ (600) по п. 1 или 2, при котором на этапе ввода (610) вводят информацию об изменении (Х0+ΔХ) длины установочного размера (Х0) и/или информацию об изменении (ΔY) позиции оси (122) колеса в диапазоне допусков перпендикулярно направлению прохождения установочного размера (Х0), и при этапе определения (620) с использованием информации об изменении (Х0+ΔХ) длины и/или информации об изменении (ΔY) позиции определяют тормозной момент (MB) и/или силу (FR) трения и/или радиус (R) трения.
8. Способ (700) выдачи тормозного сигнала (340) для тормозной силы (FB) в тормозной системе (100) для рельсового транспортного средства, причем приданная по меньшей мере одному колесу или по меньшей мере одной колесной паре тормозная система (100) содержит для выработки тормозной силы (FB) по тормозному сигналу (340), по меньшей мере один тормозной диск (102), по меньшей мере одну выполненную с возможностью взаимодействия с тормозным диском (102) тормозную обкладку (104), а также один соединенный с тормозной обкладкой (104) суппорт (106) дискового тормозного механизма, причем суппорт (106) дискового тормозного механизма с корпусом (108) тормоза укреплен в по меньшей мере одном первом месте (110) крепления и одном втором месте (112) крепления, причем второе место (112) крепления находится на заранее определенном крепежном расстоянии от первого места (110) крепления, причем на суппорте (106) дискового тормозного механизма расположены один первый сенсор (116) для выработки первого измерительного сигнала и один второй сенсор (118) для выработки второго измерительного сигнала, причем первый измерительный сигнал и второй измерительный сигнал характеризуют каждый силы (F1, F2), в частности усилие на опоре, или выведенную из них величину, причем способ (600) содержит следующие этапы:
ввод (710) тормозного момента (MB), который был определен посредством выполнения этапа способа (600) по любому из пп. 1-7, и
определение (710) тормозной силы (FB) с использованием заранее заданного тормозного момента и введенного тормозного момента (MB) для выработки тормозного сигнала (340).
9. Способ (700) по п. 8, при котором на этапе определения с использованием силы (FR) трения определяют тормозную силу (FB).
10. Способ (700) по п. 8 или 9, при котором на этапе определения (720) с использованием радиуса (R) трения определяют тормозную силу (FB).
11. Устройство (310) для определения тормозного момента (MB) в тормозной системе (100) для рельсового транспортного средства, причем приданная по меньшей мере одному колесу или по меньшей мере одной колесной паре тормозная система (100) для выработки тормозной силы (FB) по тормозному сигналу (340) содержит по меньшей мере один тормозной диск, по меньшей мере одну выполненную с возможностью взаимодействия с тормозным диском (102) тормозную обкладку (104), а также соединенный с тормозной обкладкой (104) суппорт (106) дискового тормозного механизма, причем суппорт (106) дискового тормозного механизма закреплен через корпус (108) тормоза в, по меньшей мере, одном первом месте (110) крепления и одном втором месте (112) крепления, причем второе место (112) крепления находится на заранее заданном крепежном расстоянии от первого места (110) крепления, причем на корпусе (108) тормоза или между ним и консолью (114) расположены один первый сенсор (116) для выработки первого измерительного сигнала и один второй сенсор (116) для выработки второго измерительного сигнала, причем первый измерительный сигнал и второй измерительный сигнал характеризуют каждый силы (F1, F2), в частности усилие на опоре, или выведенную из них величину, причем устройство (310) содержит:
устройство (300) сопряжения для ввода первого измерительного сигнала и второго измерительного сигнала, и
устройство (320) для определения тормозного момента с использованием установочного размера (Х0), крепежного расстояния (А), а также первого измерительного сигнала и второго измерительного сигнала, причем установочный размер (Х0) соответствует расстоянию между осью (122) вращения тормозного диска (102) и первым местом (110) крепления.
12. Устройство (330) для выдачи тормозного сигнала (340) для тормозной силы (FB) в тормозной системе (100) для рельсового транспортного средства, причем приданная по меньшей мере одному колесу или по меньшей мере одной колесной паре тормозная система (100) содержит для выработки тормозного усилия (FB) по тормозному сигналу (340) по меньшей мере один тормозной диск, по меньшей мере одну выполненную с возможностью взаимодействия с тормозным диском (102) тормозную обкладку (104), а также соединенный с тормозной обкладкой (104) суппорт (106) дискового тормозного механизма, причем суппорт (106) дискового тормозного механизма через корпус (108) тормоза укреплен в, по меньшей мере, в одном первом месте (110) крепления и одном втором месте (112) крепления, причем второе место (112) крепления расположено на заранее заданном крепежном расстоянии (А) от первого места (110) крепления, причем на суппорте (106) дискового тормозного механизма расположены один первый сенсор (116) для выработки первого измерительного сигнала и один второй сенсор (118) для выработки второго измерительного сигнала, причем первый измерительный сигнал и второй измерительный сигнал характеризуют каждый силы (F1, F2), в частности усилие на опоре, или выведенную из них величину, причем устройство (330) содержит:
одно устройство сопряжения для ввода тормозного момента (MB), определенного устройством по п. 11; и
одно устройство для определения тормозной силы (FB) с использованием заранее определенного заданного тормозного момента и введенного тормозного момента (MB) для управления тормозным сигналом (340).
| Колосоуборка | 1923 |
|
SU2009A1 |
| DE 4425598 C1, 21.12.1995 | |||
| Шпулярник к машинам для размотки стеклонити | 1988 |
|
SU1640233A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА | 2005 |
|
RU2283786C1 |
| Дисковый тормоз транспортного средства | 1984 |
|
SU1234258A1 |

