ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Данная заявка основана на заявке на патент Китая №2014108321087, зарегистрированной 26 декабря, 2014, полное содержание которой включено в данный документ в качестве ссылки, и заявляет приоритет вышеуказанной заявки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Данное раскрытие сущности изобретения относится к области техники терминала связи и, более конкретно, к способу автоматической фокусировки и устройству автоматической фокусировки.
УРОВЕНЬ ТЕХНИКИ
[0003] С развитием интеллектуальных терминалов, пользователь может реализовывать различные функции посредством интеллектуальных терминалов, причем одной наиболее распространенной прикладной функцией является функция камеры, интегрированной в интеллектуальный терминал. Пользователь может фотографировать когда угодно и где угодно заинтересовавшие сцены или людей. Когда функция камеры активирована, пользователь, после нахождения вида посредством видоискателя, может использовать способ ручной фокусировки для выполнения фокусировки на содержимом найденного вида посредством касания некоторой мишени визирования на видоискателе.
[0004] В предшествующем уровне техники, если пользователь перемещает видоискатель после ручной фокусировки, то тогда содержимое найденного вида в видоискателе может измениться. В этот момент, камера автоматически сфокусируется к центру видоискателя. Однако, поскольку существует отклонение между фокусной точкой после повторной фокусировки и мишенью визирования, сфокусированной пользователем, пользователь должен переустановить фокусную точку к мишени визирования посредством повторного выполнения ручной фокусировки, что вызывает однообразные операции фокусировки и, таким образом, приводит к плохому восприятию пользователем фотографирования.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Данное раскрытие сущности изобретения обеспечивает способ автоматической фокусировки и устройство автоматической фокусировки для решения проблемы плохого восприятия пользователем фотографирования, вызванного однообразными операциями ручной фокусировки в предшествующем уровне техники.
[0006] Согласно первому аспекту вариантов осуществления данного раскрытия сущности изобретения, обеспечен способ автоматической фокусировки, включающий в себя:
[0007] при завершении ручной фокусировки посредством касания целевого объекта в видоискателе пользователем, получение первых пространственных данных целевого объекта;
[0008] при детектировании изменения содержимого найденного вида в видоискателе, получение данных изменения положения;
[0009] вычисление вторых пространственных данных целевого объекта согласно первым пространственным данным и данным изменения положения; и
[0010] выполнение автоматической фокусировки на целевом объекте согласно вторым пространственным данным.
[0011] Необязательно, получение первых пространственных данных целевого объекта включает в себя:
[0012] вычисление первого вертикального расстояния от фокусной точки до датчика изображения, причем изображение целевого объекта формируют на датчике изображения при завершении ручной фокусировки;
[0013] получение первых пространственных координат первого положения на датчике изображения, где расположено изображение целевого объекта, согласно первому вертикальному расстоянию, с использованием фокусной точки в качестве начала трехмерной прямоугольной системы координат; и
[0014] вычисление первых пространственных векторных углов первого вектора между фокусной точкой и первым положением.
[0015] Необязательно, вычисление первого вертикального расстояния от фокусной точки до датчика изображения включает в себя:
[0016] получение расстояния до изображения при завершении ручной фокусировки; и
[0017] вычисление разности между расстоянием до изображения и фиксированным фокусным расстоянием, в качестве первого вертикального расстояния от фокусной точки до датчика изображения.
[0018] Необязательно, получение первых пространственных координат первого положения на датчике изображения, где расположено изображение целевого объекта, согласно первому вертикальному расстоянию, включает в себя:
[0019] с использованием центра видоискателя в качестве начала прямоугольной плоской системы координат, получение первых двумерных координат целевого объекта в прямоугольной плоской системе координат, причем центр видоискателя и фокусная точка находятся на одном и том же направлении нормали;
[0020] преобразование первых двумерных координат согласно заданному масштабу для получения вторых двумерных координат изображения целевого объекта на датчике изображения; и
[0021] определение первых пространственных координат изображения целевого объекта на датчике изображения согласно вторым двумерным координатам и первому вертикальному расстоянию, причем значение координаты по оси X в первых пространственных координатах является значением координаты по оси X во вторых двумерных координатах, значение координаты по оси Y в первых пространственных координатах является значением координаты по оси Y во вторых двумерных координатах, и значение координаты по оси Z в первых пространственных координатах является первым вертикальным расстоянием.
[0022] Необязательно, получение данных изменения положения при детектировании изменения содержимого найденного вида в видоискателе, включает в себя:
[0023] оценивание, перемещается ли видоискатель, посредством данных ускорения, детектируемых посредством датчика ускорения; и
[0024] при перемещении видоискателя, получение одного или нескольких пространственных изменений векторных углов, детектируемых посредством датчика направления, в качестве данных изменения положения.
[0025] Необязательно, вычисление вторых пространственных данных целевого объекта, согласно первым пространственным данным и данным изменения положения, включает в себя:
[0026] вычисление первого прямолинейного расстояния от фокусной точки до первого положения, согласно первым пространственным координатам;
[0027] вычисление одного или нескольких вторых пространственных векторных углов согласно одному или нескольким первым пространственным векторным углам и одному или нескольким пространственным изменениям векторных углов, причем один или несколько вторых пространственных векторных углов являются одним или несколькими пространственными векторными углами второго вектора между фокусной точкой и вторым положением, и, причем, второе положение является положением изображения целевого объекта на датчике изображения после завершения автоматической фокусировки; и
[0028] вычисление одной или нескольких вторых пространственных координат второго положения согласно первому прямолинейному расстоянию и одному или нескольким вторым пространственным векторным углам.
[0029] Необязательно, выполнение автоматической фокусировки на целевом объекте, согласно вторым пространственным данным, включает в себя:
[0030] получение второго вертикального расстояния от фокусной точки до второго положения согласно одной или нескольким вторым пространственным координатам, причем второе вертикальное расстояние является значением координаты по оси Z в одних или нескольких вторых пространственных координатах;
[0031] вычисление суммы второго вертикального расстояния и фиксированного фокусного расстояния, в качестве настроенного расстояния до изображения; и
[0032] перемещение набора линз до достижения расстояния от набора линз до датчика изображения, равного настроенному расстоянию до изображения.
[0033] Необязательно, перед выполнением автоматической фокусировки на целевом объекте согласно вторым пространственным данным, способ включает в себя:
[0034] вычисление третьих пространственных координат второго положения посредством алгоритма распознавания изображения; и
[0035] коррекцию вторых пространственных координат согласно третьим пространственным координатам для получения скорректированных вторых пространственных координат.
[0036] Необязательно, коррекция вторых пространственных координат, согласно третьим пространственным координатам для получения настроенных вторых пространственных координат, включает в себя:
[0037] оценивание, является ли расстояние между третьими пространственными координатами и вторыми пространственными координатами меньшим, чем заданный порог коррекции;
[0038] когда расстояние между третьими пространственными координатами и вторыми пространственными координатами является меньшим, чем заданный порог коррекции, вычисление среднего значения значений координат по оси X в третьих пространственных координатах и вторых пространственных координатах в качестве значения координаты по оси X в скорректированных вторых пространственных координатах, и вычисление среднего значения значений координат по оси Y в третьих пространственных координатах и вторых пространственных координатах в качестве значения координаты по оси Y в скорректированных вторых пространственных координатах; и
[0039] вычисление значения координаты по оси Z в скорректированных вторых пространственных координатах согласно первому прямолинейному расстоянию, значению координаты по оси X в скорректированных вторых пространственных координатах, и значению координаты по оси Y в скорректированных вторых пространственных координатах.
[0040] Согласно второму аспекту вариантов осуществления данного раскрытия сущности изобретения, обеспечено устройство автоматической фокусировки, включающее в себя:
[0041] модуль сбора данных, выполненный с возможностью, при завершении ручной фокусировки посредством касания целевого объекта в видоискателе пользователем, получения первых пространственных данных целевого объекта;
[0042] модуль детектирования, выполненный с возможностью, при детектировании изменения содержимого найденного вида в видоискателе, полученных данных изменения положения;
[0043] первый модуль вычисления, выполненный с возможностью вычисления вторых пространственных данных целевого объекта согласно первым пространственным данным и данным изменения положения; и
[0044] модуль фокусировки, выполненный с возможностью выполнения автоматической фокусировки на целевом объекте согласно вторым пространственным данным.
[0045] Необязательно, модуль сбора данных включает в себя:
[0046] подмодуль вычисления первого вертикального расстояния, выполненный с возможностью вычисления первого вертикального расстояния от фокусной точки до датчика изображения, причем изображение целевого объекта формируют на датчике изображения при завершении ручной фокусировки;
[0047] подмодуль получения первых пространственных координат, выполненный с возможностью получения первых пространственных координат первого положения на датчике изображения, где расположено изображение целевого объекта, согласно первому вертикальному расстоянию, с использованием фокусной точки в качестве начала трехмерной прямоугольной системы координат; и
[0048] подмодуль вычисления первых пространственных векторных углов, выполненный с возможностью вычисления первых пространственных векторных углов первого вектора между фокусной точкой и первым положением.
[0049] Необязательно, подмодуль вычисления первого вертикального расстояния включает в себя:
[0050] подмодуль получения расстояния до изображения, выполненный с возможностью получения расстояния до изображения при завершении ручной фокусировки; и
[0051] подмодуль вычисления разности, выполненный с возможностью вычисления разности между расстоянием до изображения и фиксированным фокусным расстоянием, в качестве первого вертикального расстояния от фокусной точки до датчика изображения.
[0052] Необязательно, подмодуль получения первых пространственных координат включает в себя:
[0053] подмодуль получения первых двумерных координат, выполненный с возможностью, с использованием центра видоискателя в качестве начала прямоугольной плоской системы координат, получения первых двумерных координат целевого объекта в прямоугольной плоской системе координат, причем центр видоискателя и фокусная точка находятся на одном и том же направлении нормали;
[0054] подмодуль получения вторых двумерных координат, выполненный с возможностью преобразования первых двумерных координат согласно заданному масштабу, для получения вторых двумерных координат изображения целевого объекта на датчике изображения; и
[0055] подмодуль определения первых пространственных координат, выполненный с возможностью определения первых пространственных координат изображения целевого объекта на датчике изображения, согласно вторым двумерным координатам и первому вертикальному расстоянию, причем значение координаты по оси X в первых пространственных координатах является значением координаты по оси X во вторых двумерных координатах, значение координаты по оси Y в первых пространственных координатах является значением координаты по оси Y во вторых двумерных координатах, и значение координаты по оси Z в первых пространственных координатах является первым вертикальным расстоянием.
[0056] Необязательно, модуль детектирования включает в себя:
[0057] подмодуль детектирования ускорения, выполненный с возможностью оценивания, перемещается ли видоискатель, посредством данных ускорения, детектируемых посредством датчика ускорения; и
[0058] подмодуль получения изменения векторного угла, выполненный с возможностью, при перемещении видоискателя, получения одного или нескольких пространственных изменений векторных углов, детектируемых посредством датчика направления, в качестве данных изменения положения.
[0059] Необязательно, первый модуль вычисления включает в себя:
[0060] подмодуль вычисления первого прямолинейного расстояния, выполненный с возможностью вычисления первого прямолинейного расстояния от фокусной точки до первого положения, согласно первым пространственным координатам;
[0061] подмодуль вычисления второго пространственного векторного угла, выполненный с возможностью вычисления одного или нескольких вторых пространственных векторных углов согласно одному или нескольким первым пространственным векторным углам и одному или нескольким пространственным изменениям векторных углов, причем один или несколько вторых пространственных векторных углов являются одним или несколькими пространственными векторными углами второго вектора между фокусной точкой и вторым положением, и, причем, второе положение является положением изображения целевого объекта на датчике изображения после завершения автоматической фокусировки; и
[0062] подмодуль вычисления второй пространственной координаты, выполненный с возможностью вычисления одной или нескольких вторых пространственных координат второго положения согласно первому прямолинейному расстоянию и одному или нескольким вторым пространственным векторным углам.
[0063] Необязательно, модуль фокусировки включает в себя:
[0064] подмодуль получения второго вертикального расстояния, выполненный с возможностью получения второго вертикального расстояния от фокусной точки до второго положения, согласно одной или нескольким вторым пространственным координатам, причем второе вертикальное расстояние является значением координаты по оси Z в одних или нескольких вторых пространственных координатах;
[0065] подмодуль вычисления настроенного расстояния до изображения, выполненный с возможностью вычисления суммы второго вертикального расстояния и фиксированного фокусного расстояния, в качестве настроенного расстояния до изображения; и
[0066] подмодуль перемещения набора линз, выполненный с возможностью перемещения набора линз до достижения расстояния от набора линз до датчика изображения, равного настроенному расстоянию до изображения.
[0067] Необязательно, устройство дополнительно включает в себя:
[0068] второй модуль вычисления, выполненный с возможностью вычисления третьих пространственных координат второго положения посредством алгоритма распознавания изображения; и
[0069] модуль коррекции, выполненный с возможностью коррекции вторых пространственных координат согласно третьим пространственным координатам, для получения скорректированных вторых пространственных координат.
[0070] Необязательно, модуль коррекции включает в себя:
[0071] подмодуль оценивания порога коррекции, выполненный с возможностью оценивания, является ли расстояние между третьими пространственными координатами и вторыми пространственными координатами меньшим, чем заданный порог коррекции; и
[0072] подмодуль вычисления скорректированного значения координаты, выполненный с возможностью, когда расстояние между третьими пространственными координатами и вторыми пространственными координатами является меньшим, чем заданный порог коррекции, вычисления среднего значения значений координат по оси X в третьих пространственных координатах и вторых пространственных координатах в качестве значения координаты по оси X в скорректированных вторых пространственных координатах, и вычисления среднего значения значений координат по оси Y в третьих пространственных координатах и вторых пространственных координатах в качестве значения координаты по оси Y в скорректированных вторых пространственных координатах, и вычисления значения координаты по оси Z в скорректированных вторых пространственных координатах согласно первому прямолинейному расстоянию, значению координаты по оси X в скорректированных вторых пространственных координатах, и значению координаты по оси Y в скорректированных вторых пространственных координатах.
[0073] Согласно третьему аспекту вариантов осуществления данного раскрытия сущности изобретения, обеспечено устройство автоматической фокусировки, включающее в себя:
[0074] процессор; и
[0075] запоминающее устройство для сохранения инструкций, которые могут быть выполнены процессором;
[0076] причем процессор выполнен с возможностью выполнения:
[0077] при завершении ручной фокусировки посредством касания целевого объекта в видоискателе пользователем, получения первых пространственных данных целевого объекта;
[0078] при детектировании изменения содержимого найденного вида в видоискателе, получения данных изменения положения;
[0079] вычисления вторых пространственных данных целевого объекта согласно первым пространственным данным и данным изменения положения; и
[0080] выполнения автоматической фокусировки на целевом объекте согласно вторым пространственным данным.
[0081] Технические решения, обеспеченные посредством вариантов осуществления данного раскрытия сущности изобретения, могут включать в себя следующие предпочтительные результаты.
[0082] Согласно данному раскрытию сущности изобретения, во время фотографирования, выполняемого с использованием терминала, первые пространственные данные целевого объекта получают при завершении ручной фокусировки посредством касания целевого объекта в видоискателе пользователем, а данные изменения положения получают, когда детектируют изменение содержимого найденного вида в видоискателе. После того, как вычисляют вторые пространственные данные целевого объекта согласно первым пространственным данным и данным изменения положения, автоматическая фокусировка может быть завершена согласно вторым пространственным данным. Следовательно, во время процесса фотографирования пользователя, если видоискатель перемещается, но целевой объект не смещается за пределы видоискателя, то возможна автоматическая фокусировка на целевом объекте. Таким образом, данное раскрытие сущности изобретения может устранить операции ручной фокусировки при изменении содержимого найденного вида, может упростить последовательности операций фокусировки, может увеличить скорость фокусировки, и, следовательно, улучшить восприятие фотографирования пользователем.
[0083] Согласно данному раскрытию сущности изобретения, при получении первых пространственных данных целевого объекта, посредством получения расстояния до изображения после завершения ручной фокусировки и получения первых пространственных координат и первых пространственных векторных углов изображения целевого объекта на датчике изображения с использованием фокусной точки в качестве начала трехмерной прямоугольной системы координат, могут быть вычислены пространственные данные после изменения положения целевого объекта с использованием первых пространственных координат и первых пространственных векторных углов. Таким образом, можно реализовать удобную автоматическую фокусировку.
[0084] Согласно данному раскрытию сущности изобретения, датчик ускорения, интегрированный в терминал, может быть использован для оценивания того, перемещается ли видоискатель, и, при перемещении видоискателя, пространственные изменения векторных углов, обеспеченные при перемещении, могут быть детектированы посредством датчика направления; следовательно, пространственные данные после изменения положения целевого объекта могут быть вычислены согласно пространственным изменениям векторных углов, первым пространственным координатам и первым пространственным векторным углам, для реализации автоматической фокусировки.
[0085] Согласно данному раскрытию сущности изобретения, вторые пространственные координаты могут также быть скорректированы посредством третьих пространственных координат, вычисляемых с использованием алгоритма распознавания изображения, перед выполнением автоматической фокусировки, согласно вторым пространственным координатам, и, таким образом, точность автоматической фокусировки может быть дополнительно улучшена.
[0086] Следует понимать, что, как предшествующее общее описание, так и нижеследующее подробное описание являются только иллюстративными и пояснительными, а не ограничивающими данное изобретение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0087] Сопутствующие чертежи, которые включены в состав и образуют часть данного описания, иллюстрируют варианты осуществления, соответствующие данному изобретению и, вместе с описанием, служат для объяснения принципов данного изобретения.
[0088] Фиг. 1 является последовательностью операций способа автоматической фокусировки согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения.
[0089] Фиг. 2 является последовательностью операций другого способа автоматической фокусировки согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения.
[0090] Фиг. 3 является схемой, показывающей формирование изображения после завершения фокусировки посредством терминала, согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения.
[0091] Фиг. 4 является блок-схемой устройства автоматической фокусировки согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения.
[0092] Фиг. 5 является блок-схемой другого устройства автоматической фокусировки согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения.
[0093] Фиг. 6 является блок-схемой другого устройства автоматической фокусировки согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения.
[0094] Фиг. 7 является блок-схемой другого устройства автоматической фокусировки согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения.
[0095] Фиг. 8 является блок-схемой другого устройства автоматической фокусировки согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения.
[0096] Фиг. 9 является блок-схемой другого устройства автоматической фокусировки согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения.
[0097] Фиг. 10 является блок-схемой другого устройства автоматической фокусировки согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения.
[0098] Фиг. 11 является блок-схемой другого устройства автоматической фокусировки согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения.
[0099] Фиг. 12 является блок-схемой другого устройства автоматической фокусировки согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения.
[00100] Фиг. 13 является структурной схемой устройства автоматической фокусировки согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[00101] Теперь будут сделаны подробные ссылки на иллюстративные варианты осуществления, примеры которых показаны в сопутствующих чертежах. Нижеследующее описание относится к сопутствующим чертежам, в которых одинаковые позиции в разных чертежах представляют одинаковые или подобные элементы, если не указано иное. Реализации, изложенные в нижеследующем описании иллюстративных вариантов осуществления, не представляют собой все реализации, соответствующие данному изобретению. Вместо этого, они являются просто примерами устройств и способов, соответствующих некоторым аспектам в отношении данного изобретения, изложенным в приложенной формуле изобретения.
[00102] Терминология, используемая в данном раскрытии сущности изобретения, приведена только в целях описания конкретных вариантов осуществления и не предназначена для ограничения данного изобретения. При использовании в данном раскрытии сущности изобретения и приложенной формуле изобретения, формы единственного числа «один», «некоторый» и «этот», как предполагается, включают в себя также формы множественного числа, если иное ясно не указано в контексте. Следует также понимать, что термин «и/или», при использовании в данном документе, относится и охватывает любые и все возможные комбинации из одного или нескольких связанных перечисленных элементов.
[00103] Следует понимать, что, хотя термины первый, второй, третий, и т.д., могут быть использованы здесь для описания различной информации, эта информация не должна быть ограничена этими терминами. Эти термины должны быть использованы только для различения информации одного типа от другого. Например, первая информация может быть названа второй информацией, и, подобным образом, вторая информация может быть названа первой информацией, не выходя за рамки объема данного изобретения. В зависимости от контекста, при использовании здесь, слова «если» могут быть интерпретированы как «когда …» или «в качестве реакции на определение …».
[00104] Фиг. 1 является последовательностью операций способа автоматической фокусировки согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения. Как показано на фиг. 1, этот способ может быть применен в терминале и может включать в себя следующие стадии.
[00105] На стадии 101, при завершении ручной фокусировки посредством касания целевого объекта в видоискателе пользователем, получают первые пространственные данные целевого объекта.
[00106] Терминал в вариантах осуществления данного раскрытия сущности изобретения, главным образом, относится к различным интеллектуальным терминалам, которые интегрируют функцию камеры, например, смартфону, планшетному компьютеру, персональному цифровому секретарю (PAD) и т.п. Набор линз, обеспеченный на интеллектуальном терминале и выполненный с возможностью реализации функции камеры, обычно использует фиксированное фокусное расстояние (f), т.е., оптическое масштабирование не может быть реализовано. Во время процесса фокусировки, терминал изменяет расстояние между набором линз и датчиком изображения для формирования изображения посредством перемещения набора линз для обеспечения расстояния, равного расстоянию до изображения (v). А именно, фокальная плоскость результирующего изображения посредством фокусировки совпадает с вертикальной плоскостью датчика изображения для обеспечения четкого изображения. В этот момент, фокусировку завершают.
[00107] В вариантах осуществления данного раскрытия сущности изобретения, когда пользователь активирует функцию камеры терминала, он может осматривать содержимое найденного вида в видоискателе для настройки того, что он хочет сфотографировать; кроме того, ручная фокусировка может быть завершена посредством касания некоторого целевого объекта в видоискателе. После завершения ручной фокусировки, изображение целевого объекта формируют на датчике изображения. В этот момент, изображение является четким. После ручной фокусировки пользователя, если пользователь перемещает видоискатель для повторного нахождения вида, т.е., содержимое найденного вида изменяется, то положение целевого объекта в видоискателе изменится, но целевой объект не смещается за пределы видоискателя; для обеспечения способности терминала к автоматической фокусировке на целевом объекте при таком условии, могут быть получены первые пространственные данные целевого объекта после завершения ручной фокусировки. Первые пространственные данные могут включать в себя первые пространственные координаты и первые пространственные векторные углы. Таким образом, первые пространственные данные могут быть использованы для завершения последующей процедуры автоматической фокусировки.
[00108] Когда получают первые пространственные данные целевого объекта, терминал может сначала вычислить первое вертикальное расстояние от фокусной точки до датчика изображения и установить трехмерную прямоугольную систему координат с использованием фокусной точки в качестве начала координат. В этот момент, поскольку ручная фокусировка завершена, изображение целевого объекта формируют на датчике изображения. Предполагая, что изображение целевого объекта расположено у первого положения на датчике изображения, получают первые пространственные координаты первого положения в трехмерной прямоугольной системе координат. Первые пространственные координаты составляют из координаты по оси X, координаты по оси Y и координаты по оси Z, а именно, значение координаты по оси Z является упомянутым выше первым вертикальным расстоянием. Далее, первые пространственные векторные углы первого вектора между фокусной точкой и первым положением вычисляют с использованием формулы векторного угла в предшествующем уровне техники, на основе трехмерной прямоугольной системы координат. Первые пространственные векторные углы включают в себя прилежащий к оси X угол между первым вектором и осью X, прилежащий к оси Y угол между первым вектором и осью Y, и прилежащий к оси Z угол между первым вектором и осью Z.
[00109] На стадии 102, при детектировании изменения содержимого найденного вида, получают данные изменения положения.
[00110] Различные датчики, имеющие разные функции, интегрируют обычно в интеллектуальный терминал, среди них два типа датчиков могут включать в себя датчик ускорения и датчик направления. Датчик ускорения выполнен с возможностью детектирования величины и направления ускорения, которое испытывает интеллектуальный терминал, и, таким образом, можно оценить, поворачивают ли терминал. Датчик направления выполнен с возможностью детектирования углов перемещения интеллектуального терминала относительно каждой оси координат трехмерного пространства. Например, датчик направления может быть гироскопическим датчиком.
[00111] В этом варианте осуществления, после получения терминалом данных ускорения, детектируемых посредством датчика ускорения, может быть определено согласно данным ускорения, поворачивают ли терминал, и, таким образом, может быть оценено, перемещают ли видоискатель. Когда оценивают, что видоискатель перемещают, и когда перемещение прекращается, могут быть получены векторные углы пространственного изменения, детектируемого посредством датчика направления. Пространственные изменения векторных углов относятся к изменениям текущего пространственного векторного угла по отношению к пространственным векторным углам при завершении ручной фокусировки, включая изменение угла к оси X по отношению к оси X, изменение угла к оси Y по отношению к оси Y, и изменение угла к оси Z по отношению к оси Z.
[00112] На стадии 103, вычисляют вторые пространственные данные целевого объекта согласно первым пространственным данным и данным изменения положения.
[00113] Первые пространственные векторные углы первого вектора между фокусной точкой и первым положением приобретают на стадии 101, и векторные углы для пространственного изменения приобретают на стадии 102. Следовательно, на этой стадии, вторые пространственные векторные углы могут быть вычислены согласно первым пространственным векторным углам и пространственным изменениям векторных углов, вторые пространственные векторные углы являются пространственными векторными углами второго вектора между фокусной точкой и вторым положением, а второе положение является положением изображения целевого объекта на датчике изображения после завершения автоматической фокусировки. Прилежащий к оси X угол во вторых пространственных векторных углах является суммой прилежащего к оси X угла в первых пространственных векторных углах и изменения угла к оси X в пространственных изменениях векторных углов, прилежащий к оси Y угол во вторых пространственных векторных углах является суммой прилежащего к оси Y угла в первых пространственных векторных углах и изменения угла к оси Y в пространственных изменениях векторных углов, и прилежащий к оси Z угол во вторых пространственных векторных углах является суммой прилежащего к оси Z угла в первых пространственных векторных углах и изменения угла к оси Z в пространственных изменениях векторных углов. На стадии 101, получают первые пространственные координаты первого положения в трехмерной прямоугольной системе координат. Следовательно, на этой стадии, первое прямолинейное расстояние от фокусной точки до первого положения может быть вычислено согласно первым пространственным координатам, а вторые пространственные координаты второго положения могут быть вычислены согласно первому прямолинейному расстоянию и вышеуказанным приобретенным вторым пространственным векторным углам. Значение координаты по оси X во вторых пространственных координатах получают посредством умножения первого прямолинейного расстояния на значение косинуса прилежащего к оси X угла из вторых пространственных векторных углов, значение координаты по оси Y во вторых пространственных координатах приобретают посредством умножения первого прямолинейного расстояния на значение косинуса прилежащего к оси Y угла из вторых пространственных векторных углов, и значение координаты по оси Z во вторых пространственных координатах приобретают посредством умножения первого прямолинейного расстояния на значение косинуса прилежащего к оси Z угла из вторых пространственных векторных углов.
[00114] На стадии 104, автоматическую фокусировку выполняют на целевом объекте согласно вторым пространственным данным.
[00115] После получения вторых пространственных координат на стадии 103, второе вертикальное расстояние от фокусной точки до второго положения может быть получено согласно второй пространственной координате, а именно, второе вертикальное расстояние является значением координаты по оси Z во вторых пространственных координатах, и вычисляют сумму второго вертикального расстояния и фиксированного фокусного расстояния в качестве настроенного расстояния до изображения. Затем, терминал перемещает набор линз до тех пор, пока формируемое изображение целевого объекта не расположится на датчике изображения, когда расстояние от набора линз до датчика изображения равно настроенному расстоянию до изображения. В этот момент, формируемое изображение целевого объекта является четким, и автоматическую фокусировку завершают.
[00116] Согласно вариантам осуществления данного раскрытия сущности изобретения, перед выполнением автоматической фокусировки согласно вторым пространственным данным, вторые пространственные данные могут также быть скорректированы. А именно, когда вторые пространственные данные являются вторыми пространственными координатами второго положения, третьи пространственные координаты второго положения могут быть вычислены посредством алгоритма распознавания изображения, и вышеуказанные вторые пространственные координаты могут быть скорректированы согласно третьим пространственным координатам, для приобретения скорректированных вторых пространственных координат.
[00117] Во время конкретного процесса коррекции вторых пространственных координат, терминал может оценить, является ли расстояние между третьими пространственными координатами и вторыми пространственными координатами меньшим, чем заданный порог коррекции. Когда расстояние между третьими пространственными координатами и вторыми пространственными координатами является меньшим, чем заданный порог коррекции, среднее значение значений координат по оси X в третьих пространственных координатах и вторых пространственных координатах вычисляют в качестве значения координаты по оси X в скорректированных вторых пространственных координатах, а среднее значение значений координат по оси Y в третьих пространственных координатах и вторых пространственных координатах вычисляют в качестве значения координаты по оси Y в скорректированных вторых пространственных координатах. Затем, значение координаты по оси Z в скорректированных вторых пространственных координатах может быть вычислено согласно первому прямолинейному расстоянию, значению координаты по оси X в скорректированных вторых пространственных координатах, и значению координаты по оси Y в скорректированных вторых пространственных координатах. А именно, скорректированное значение координаты по оси Z является упомянутым выше вторым вертикальным расстоянием. Например, если предполагается, что первое прямолинейное расстояние равно L, скорректированное значение координаты по оси X равно a, скорректированное значение координаты по оси Y равно b и скорректированное значение координаты по оси Z равно c, то тогда вышеуказанные значения удовлетворяют уравнению: L2=a2+b2+c2.
[00118] В упомянутом выше варианте осуществления, во время фотографирования, выполняемого с использованием терминала, первые пространственные данные целевого объекта получают при завершении ручной фокусировки посредством касания целевого объекта в видоискателе пользователем, а данные изменения положения получают, при детектировании изменения содержимого найденного вида в видоискателе. После вычисления вторых пространственных данных целевого объекта согласно первым пространственным данным и данным изменения положения, автоматическая фокусировка может быть завершена согласно вторым пространственным данным. Следовательно, во время процесса фотографирования пользователя, если видоискатель перемещается, но целевой объект не смещается за пределы видоискателя, то возможна автоматическая фокусировка на целевом объекте. Таким образом, данный вариант осуществления может устранить операции ручной фокусировки при изменении содержимого найденного вида, может упростить последовательности операций фокусировки, может увеличить скорость фокусировки, и, следовательно, улучшить восприятие фотографирования пользователем. Дополнительно, согласно данному варианту осуществления, вторые пространственные координаты могут также быть скорректированы посредством третьих пространственных координат, вычисляемых с использованием алгоритма распознавания изображения, перед выполнением автоматической фокусировки согласно вторым пространственным координатам, и, таким образом, точность автоматической фокусировки может быть дополнительно увеличена.
[00119] Фиг. 2 является последовательностью операций другого способа автоматической фокусировки согласно иллюстративному варианту осуществления. Как показано на фиг. 2, этот способ может быть применен в терминале и может включать в себя следующие стадии.
[00120] На стадии 201, при завершении ручной фокусировки посредством касания целевого объекта в видоискателе пользователем, вычисляют первое вертикальное расстояние от фокусной точки до датчика изображения.
[00121] Терминал в вариантах осуществления данного раскрытия сущности изобретения, главным образом, относится к различным интеллектуальным терминалам, которые интегрируют функцию камеры. Во время процесса формирования изображения посредством камеры, фокусное расстояние (f), расстояние до объекта (u) и расстояние до изображения (v) удовлетворяют уравнению Гаусса для формирования изображения, причем фокусное расстояние относится к расстоянию между набором линз и фокусной точкой, расстояние до объекта относится к расстоянию от вертикальной плоскости, в которой расположен фотографируемый объект, до набора линз, и расстояние до изображения относится к расстоянию от изображения фотографируемого объекта до набора линз. Обычно, терминал не может реализовать оптическое масштабирование, и набор линз терминала имеет фиксированное фокусное расстояние f. Следовательно, во время процесса фокусировки, терминал может изменить расстояние между набором линз и датчиком изображения для формирования изображения посредством перемещения набора линз таким образом, чтобы упомянутое выше расстояние равнялось v при завершении фокусировки, и, между тем, вертикальное расстояние от фокусной точки до датчика изображения равнялось d. Фиг. 3 является схемой, показывающей формирование изображения после завершения фокусировки посредством терминала, согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения.
[00122] В этом варианте осуществления, когда пользователь активирует функцию камеры терминала, он может осматривать содержимое найденного вида в видоискателе для настройки того, что он хочет сфотографировать; кроме того, ручная фокусировка может быть завершена посредством касания некоторого целевого объекта в видоискателе, как показано на фиг. 3. После завершения ручной фокусировки, изображение целевого объекта располагают на датчике изображения. В этот момент, изображение является четким. Если предположить, что расстояние до изображения равно v1 и фиксированное фокусное расстояние равно f в этот момент, то тогда первое вертикальное расстояние d1 от фокусной точки до датчика изображения равно d1. Уравнение вычисления d1 выглядит следующим образом:
[00123] d1=v1-f 
[00124] На стадии 202, с использованием фокусной точки в качестве начала трехмерной прямоугольной системы координат, получают первые пространственные координаты первого положения на датчике изображения, где расположено изображение целевого объекта, согласно первому вертикальному расстоянию.
[00125] На этой стадии, сначала центр видоискателя может быть взят в качестве начала прямоугольной плоской системы координат, причем центр видоискателя и фокусная точка находятся на одном и том же направлении нормали. В этот момент, получают первые двумерные координаты целевого объекта в прямоугольной плоской системе координат, т.е., P (x, y), и единицей измерения первых двумерных координат является пиксель (px). Затем, устанавливают трехмерную прямоугольную систему координат с использованием фокусной точки в качестве начала координат. В этот момент, поскольку ручная фокусировка завершена, изображение целевого объекта формируют на датчике изображения. Предполагая, что изображение целевого объекта формируют у первого положения P1 на датчике изображения, получают первые пространственные координаты первого положения P1 в трехмерной прямоугольной системе координат. В этот момент, первые двумерные координаты P (x, y) могут быть преобразованы согласно заданному масштабу на основе размера видоискателя и размера датчика изображения для получения вторых двумерных координат изображения целевого объекта на датчике изображения, которые обозначают как (x1, y1). Например, при фотографировании изображения с использованием соотношения длины к ширине, составляющего 4:3, пиксельного размера видоискателя, составляющего 1440*1080, длины и ширины датчика изображения, равных 0,261 дюйма и 0,196 дюйма, соответственно, и первых двумерных координат целевого объекта на видоискателе, предположим, P (500px, 500px), тогда соответствующие вторые двумерные координаты в трехмерной прямоугольной системе координат равны (0,090 дюйма, 0,090 дюйма).
[00126] Далее, первые пространственные координаты P1 (x1, y1, z1) изображения целевого объекта на датчике изображения могут быть определены согласно вторым двумерным координатам (x1, y1) и первому вертикальному расстоянию d1. Значение координаты по оси X в первых пространственных координатах является значением координаты по оси X x1 во вторых двумерных координатах, значение координаты по оси Y первых пространственных координат является значением координаты по оси Y y1 во вторых двумерных координатах, и значение координаты по оси Z в первых пространственных координатах является первым вертикальным расстоянием z1=d1.
[00127] На стадии 203, вычисляют первые пространственные векторные углы первого вектора между фокусной точкой и первым положением.
[00128] После завершения ручной фокусировки и получения первых пространственных координат первого положения, терминал может вычислить первые пространственные векторные углы (∠x1, ∠y1, ∠z1) от фокусной точки до первого положения P1 посредством формулы векторного угла трехмерной прямоугольной системы координат. Прилежащий к оси X угол между первым вектором и осью X равен ∠x1, прилежащий к оси Y угол между первым вектором и осью Y равен ∠y1, и прилежащий к оси Z угол между первым вектором и осью Z равен ∠z1.
[00129] На стадии 204, оценивают, перемещается ли видоискатель, посредством данных ускорения, детектируемых посредством датчика ускорения.
[00130] Различные датчики, имеющие разные функции, интегрируют обычно в терминал, среди них датчик ускорения выполнен с возможностью детектирования величины и направления ускорения, которое испытывает терминал. В этом варианте осуществления, после завершения ручной фокусировки и получения терминалом данных ускорения, детектируемых посредством датчика ускорения, можно определить, согласно данным ускорения, поворачивают ли терминал, и, таким образом, можно оценить, перемещается ли видоискатель.
[00131] На стадии 205, когда видоискатель перемещается, получают векторные углы для пространственных изменений, детектируемых посредством датчика направления, в качестве данных изменения положения.
[00132] Дополнительно к датчику ускорения, датчик направления, выполненный с возможностью детектирования углов перемещения терминала относительно каждой оси координат трехмерного пространства, может быть также интегрирован в терминал. Например, датчик направления может быть гироскопическим датчиком.
[00133] При оценивании, согласно данным ускорения, что видоискатель перемещается, на стадии 204, векторные углы для пространственных изменений, детектируемые посредством датчика направления, могут быть получены, когда перемещение прекращается. Пространственные изменения векторных углов относятся к изменениям текущих пространственных векторных углов по отношению к пространственным векторным углам при завершении ручной фокусировки, включая изменение угла к оси X (∠Δx) по отношению к оси X, изменение угла к оси Y (∠Δy) по отношению к оси Y, и изменение угла к оси Z (∠Δz) по отношению к оси Z.
[00134] На стадии 206, вычисляют первое прямолинейное расстояние от фокусной точки до первого положения, согласно первым пространственным координатам.
[00135] Первые пространственные координаты P1 (x1, y1, z1) приобретают на стадии 202. На этой стадии, первое прямолинейное расстояние ρ от фокусной точки до P1 может быть вычислено согласно этим координатам, P1 (x1, y1, z1), причем уравнение вычисления ρ выглядит следующим образом:
[00136] ρ2= x12+y12+z12
[00137] На стадии 207, вычисляют вторые пространственные векторные углы согласно первым пространственным векторным углам и пространственным изменениям векторных углов.
[00138] На этой стадии, вторые пространственные векторные углы могут быть вычислены согласно первым пространственным векторным углам, полученным на стадии 203, и пространственным изменениям векторных углов, полученным на стадии 205. Вторые пространственные векторные углы относятся к пространственным векторным углам второго вектора между фокусной точкой и вторым положением P2, а второе положение P2 является положением изображения целевого объекта на датчике изображения после завершения терминалом автоматической фокусировки, в ситуации, когда ручная фокусировка завершена, содержимое найденного вида в видоискателе изменяется, но целевой объект не смещается за пределы видоискателя.
[00139] Предполагают, что прилежащий к оси X угол между вторым вектором и осью X равен ∠x2, прилежащий к оси Y угол между вторым вектором и осью Y равен ∠y2, и прилежащий к оси Z угол между вторым вектором и осью Z равен ∠z2, и, тогда, вычисляют вторые пространственные векторные углы согласно следующему уравнению:
[00140] ∠x2=∠x1+∠Δx;
[00141] ∠y2=∠y1+∠Δy;
[00142] ∠z2=∠z1+∠Δz;
[00143] На стадии 208, вторые пространственные координаты второго положения вычисляют согласно первому прямолинейному расстоянию и вторым пространственным векторным углам.
[00144] На этой стадии, вторые пространственные координаты P2 (x2, y2, z2) второго положения P2 могут быть вычислены согласно первому прямолинейному расстоянию ρ, приобретенному на стадии 206, и вторым пространственным векторным углам (∠x2, ∠y2, ∠z2), вычисленным на стадии 207. Значение координаты по оси X x2 из P2 получают посредством умножения ρ на значение косинуса ∠x2, значение координаты по оси Y y2 из P2 получают посредством умножения ρ на значение косинуса ∠y2, и значение координаты по оси Z z2 из P2 получают посредством умножения ρ на значение косинуса ∠z2. А именно, вторые пространственные координаты могут быть вычислены согласно следующему уравнению:
[00145] x2=ρ×cos∠x2
[00146] y2=ρ×cos∠y2
[00147] z2=ρ×cos∠z2
[00148] На стадии 209, получают второе вертикальное расстояние от фокусной точки до второго положения согласно вторым пространственным координатам. Второе вертикальное расстояние является значением координаты по оси Z во вторых пространственных координатах.
[00149] Вторые пространственные координаты P2 (x2, y2, z2) второго положения P2 получают на стадии 208; следовательно, второе вертикальное расстояние d2 от фокусной точки до второго положения P2 может быть получено согласно вторым пространственным координатам, т.е., второе вертикальное расстояние d2 является значением координаты по оси Z z2 во вторых пространственных координатах.
[00150] Следует отметить, что, согласно этой стадии, для реализации автоматической фокусировки после ручной фокусировки, должно быть получено второе вертикальное расстояние d2 (т.е., z2). Следовательно, можно вычислить только z2=ρ×cos∠z2 в Уравнении (4) на стадии 208, и, таким образом, датчик направления может получить только ∠Δz на стадии 205, и можно вычислить только z2=∠z1+∠Δz на стадии 207. Следовательно, вычислительные ресурсы терминала могут быть дополнительно сэкономлены.
[00151] На стадии 210, вычисляют сумму второго вертикального расстояния и фиксированного фокусного расстояния в качестве настроенного расстояния до изображения.
[00152] На этой стадии, предполагают, что настроенное расстояние до изображения равно v2, тогда уравнение вычисления v2 выглядит следующим образом:
[00153] v2=d2+f
[00154] На стадии 211, набор линз перемещают до достижения расстояния от набора линз до датчика изображения, равного настроенному расстоянию до изображения.
[00155] При завершении ручной фокусировки, расстояние между набором линз и датчиком изображения для формирования изображения равно расстоянию до изображения; следовательно, когда настроенное расстояние до изображения вычисляют согласно положению изображения целевого объекта на датчике изображения после автоматической фокусировки на предшествующих стадиях, терминал может выполнить автоматическую фокусировку посредством управления перемещением набора линз; когда набор линз перемещается к положению, где расстояние между набором линз и датчиком изображения является настроенным расстоянием до изображения v2, автоматическую фокусировку завершают.
[00156] В предшествующем варианте осуществления, во время фотографирования, выполняемого с использованием терминала, после завершения ручной фокусировки посредством касания целевого объекта в видоискателе пользователем, если детектируют, что содержимое найденного вида в видоискателе изменяется, то расстояние до изображения после завершения автоматической фокусировки может быть получено посредством вычисления пространственных данных после изменения положения целевого объекта, для управления перемещением набора линз для соответствия расстоянию до изображения, и, таким образом, автоматическую фокусировку завершают. Следовательно, во время процесса фотографирования пользователя, если видоискатель перемещается, но целевой объект не смещается за пределы видоискателя, то возможна автоматическая фокусировка на целевом объекте. Таким образом, этот вариант осуществления может устранить операции ручной фокусировки при изменении содержимого найденного вида, может упростить последовательности операций фокусировки, может увеличить скорость фокусировки, и, следовательно, улучшить восприятие фотографирования пользователем.
[00157] В соответствии с упомянутыми выше вариантами осуществления способа автоматической фокусировки, данное раскрытие сущности изобретения также обеспечивает варианты осуществления устройства автоматической фокусировки и терминала, в котором применяют устройство автоматической фокусировки.
[00158] Фиг. 4 является блок-схемой устройства автоматической фокусировки согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения. Как показано на фиг. 4, это устройство включает в себя: модуль 410 сбора данных, модуль 420 детектирования, первый модуль 430 вычисления и модуль 440 фокусировки.
[00159] Модуль 410 сбора данных выполнен с возможностью, при завершении ручной фокусировки посредством касания целевого объекта в видоискателе пользователем, получения первых пространственных данных целевого объекта.
[00160] Модуль 420 детектирования выполнен с возможностью, при детектировании изменения содержимого найденного вида в видоискателе, получения данных изменения положения.
[00161] Первый модуль 430 вычисления выполнен с возможностью вычисления вторых пространственных данных целевого объекта согласно первым пространственным данным и данным изменения положения.
[00162] Модуль 440 фокусировки выполнен с возможностью выполнения автоматической фокусировки на целевом объекте согласно вторым пространственным данным.
[00163] Согласно упомянутому выше варианту осуществления, во время фотографирования, выполняемого с использованием терминала, получают первые пространственные данные целевого объекта при завершении ручной фокусировки посредством касания целевого объекта в видоискателе пользователем, и получают данные изменения положения при детектировании изменения содержимого найденного вида в видоискателе. После вычисления вторых пространственных данных целевого объекта согласно первым пространственным данным и данным изменения положения, автоматическая фокусировка может быть завершена согласно вторым пространственным данным. Следовательно, во время процесса фотографирования пользователя, если видоискатель перемещается, но целевой объект не смещается за пределы видоискателя, то возможна автоматическая фокусировка на целевом объекте. Таким образом, этот вариант осуществления может устранить операции ручной фокусировки при изменении содержимого найденного вида, может упростить последовательности операций фокусировки, может увеличить скорость фокусировки, и, следовательно, улучшить восприятие фотографирования пользователем.
[00164] Фиг. 5 является блок-схемой другого устройства автоматической фокусировки согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения. Как показано на фиг. 5, на основе предшествующего варианта осуществления, показанного на фиг. 4, модуль 410 сбора данных может включать в себя: подмодуль 411 вычисления первого вертикального расстояния, подмодуль 412 получения первых пространственных координат и подмодуль 413 вычисления первых пространственных векторных углов.
[00165] Подмодуль 411 вычисления первого вертикального расстояния выполнен с возможностью вычисления первого вертикального расстояния от фокусной точки до датчика изображения, причем изображение целевого объекта формируют на датчике изображения при завершении ручной фокусировки.
[00166] Подмодуль 412 получения первых пространственных координат выполнен с возможностью получения первых пространственных координат первого положения на датчике изображения, где расположено изображение целевого объекта, согласно первому вертикальному расстоянию, с использованием фокусной точки в качестве начала трехмерной прямоугольной системы координат.
[00167] Подмодуль 413 вычисления первых пространственных векторных углов выполнен с возможностью вычисления первых пространственных векторных углов первого вектора между фокусной точкой и первым положением.
[00168] Фиг. 6 является блок-схемой другого устройства автоматической фокусировки согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения. Как показано на фиг. 6, на основе предшествующего варианта осуществления, показанного на фиг. 5, подмодуль 411 вычисления первого вертикального расстояния может включать в себя: подмодуль 4111 получения расстояния до изображения и подмодуль 4112 вычисления разности.
[00169] Подмодуль 4111 получения расстояния до изображения выполнен с возможностью получения расстояния до изображения при завершении ручной фокусировки.
[00170] Подмодуль 4112 вычисления разности выполнен с возможностью вычисления разности между расстоянием до изображения и фиксированным фокусным расстоянием, в качестве первого вертикального расстояния от фокусной точки до датчика изображения.
[00171] Фиг. 7 является блок-схемой другого устройства автоматической фокусировки согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения. Как показано на фиг. 7, на основе предшествующего варианта осуществления, показанного на фиг. 5, подмодуль 412 получения первых пространственных координат может включать в себя: подмодуль 4121 получения первых двумерных координат, подмодуль 4122 получения вторых двумерных координат и подмодуль 4123 определения первых пространственных координат.
[00172] Подмодуль 4121 получения первых двумерных координат выполнен с возможностью, с использованием центра видоискателя в качестве начала прямоугольной плоской системы координат, получения первых двумерных координат целевого объекта в прямоугольной плоской системе координат, причем центр видоискателя и фокусная точка находятся на одном и том же направлении нормали.
[00173] Подмодуль 4122 получения вторых двумерных координат выполнен с возможностью преобразования первых двумерных координат согласно заданному масштабу, для получения вторых двумерных координат изображения целевого объекта на датчике изображения.
[00174] Подмодуль 4123 определения первых пространственных координат выполнен с возможностью определения первых пространственных координат изображения целевого объекта на датчике изображения согласно вторым двумерным координатам и первому вертикальному расстоянию, причем значение координаты по оси X в первых пространственных координатах является значением координаты по оси X во вторых двумерных координатах, значение координаты по оси Y в первых пространственных координатах является значением координаты по оси Y во вторых двумерных координатах, и значение координаты по оси Z в первых пространственных координатах является первым вертикальным расстоянием.
[00175] Согласно упомянутому выше варианту осуществления, при получении первых пространственных данных целевого объекта, посредством получения расстояния до изображения после завершения ручной фокусировки, и получения первых пространственных координат и первых пространственных векторных углов изображения целевого объекта на датчике изображения с использованием фокусной точки в качестве начала трехмерной прямоугольной системы координат, пространственные данные после изменения положения целевого объекта могут быть вычислены с использованием первых пространственных координат и первых пространственных векторных углов. Таким образом, можно реализовать удобную автоматическую фокусировку.
[00176] Фиг. 8 является блок-схемой другого устройства автоматической фокусировки согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения. Как показано на фиг. 8, на основе предшествующего варианта осуществления, показанного на фиг. 5, модуль 420 детектирования может включать в себя: подмодуль 421 детектирования ускорения и подмодуль 422 получения изменения векторного угла.
[00177] Подмодуль 421 детектирования ускорения выполнен с возможностью оценивания, перемещается ли видоискатель, посредством данных ускорения, детектируемых посредством датчика ускорения.
[00178] Подмодуль 422 получения изменения векторного угла выполнен с возможностью, при перемещении видоискателя, получения одного или нескольких пространственных изменений векторных углов, детектируемых посредством датчика направления, в качестве данных изменения положения.
[00179] Фиг. 9 является блок-схемой другого устройства автоматической фокусировки согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения. Как показано на фиг. 9, на основе предшествующего варианта осуществления, показанного на фиг. 8, первый модуль 430 вычисления может включать в себя: подмодуль 431 вычисления первого прямолинейного расстояния, подмодуль 432 вычисления второго пространственного векторного угла и подмодуль 433 вычисления второй пространственной координаты.
[00180] Подмодуль 431 вычисления первого прямолинейного расстояния выполнен с возможностью вычисления первого прямолинейного расстояния от фокусной точки до первого положения, согласно первым пространственным координатам;
[00181] Подмодуль 432 вычисления второго пространственного векторного угла выполнен с возможностью вычисления одного или нескольких вторых пространственных векторных углов согласно одному или нескольким первым пространственным векторным углам и одному или нескольким пространственным изменениям векторных углов, причем один или несколько вторых пространственных векторных углов являются одним или несколькими пространственными векторными углами второго вектора между фокусной точкой и вторым положением, и, причем, второе положение является положением изображения целевого объекта на датчике изображения после завершения автоматической фокусировки.
[00182] Подмодуль 433 вычисления второй пространственной координаты выполнен с возможностью вычисления одной или нескольких вторых пространственных координат второго положения согласно первому прямолинейному расстоянию и одному или нескольким вторым пространственным векторным углам.
[00183] Фиг. 10 является блок-схемой другого устройства автоматической фокусировки согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения. Как показано на фиг. 10, на основе предшествующего варианта осуществления, показанного на фиг. 9, модуль 440 фокусировки может включать в себя: подмодуль 441 получения второго вертикального расстояния, подмодуль 442 вычисления настроенного расстояния до изображения и подмодуль 443 перемещения набора линз.
[00184] Подмодуль 441 получения второго вертикального расстояния выполнен с возможностью получения второго вертикального расстояния от фокусной точки до второго положения согласно одной или нескольким вторым пространственным координатам, причем второе вертикальное расстояние является значением координаты по оси Z в одних или нескольких вторых пространственных координатах.
[00185] Подмодуль 442 вычисления настроенного расстояния до изображения выполнен с возможностью вычисления суммы второго вертикального расстояния и фиксированного фокусного расстояния, в качестве настроенного расстояния до изображения.
[00186] Подмодуль 443 перемещения набора линз выполнен с возможностью перемещения набора линз до достижения расстояния от набора линз до датчика изображения, равного настроенному расстоянию до изображения.
[00187] Согласно упомянутому выше варианту осуществления, датчик ускорения, интегрированный в терминал, может быть использован для оценивания того, перемещается ли видоискатель, и, при перемещении видоискателя, пространственные изменения векторных углов, обеспеченные при перемещении, могут быть детектированы посредством датчика направления; следовательно, пространственные данные после изменения положения целевого объекта могут быть вычислены согласно пространственным изменениям векторных углов, первым пространственным координатам и первым пространственным векторным углам, для реализации автоматической фокусировки.
[00188] Фиг. 11 является блок-схемой другого устройства автоматической фокусировки согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения. Как показано на фиг. 11, на основе предшествующего варианта осуществления, показанного на фиг. 9 или 10, это устройство может дополнительно включать в себя: второй модуль 450 вычисления и модуль 460 коррекции.
[00189] Второй модуль 450 вычисления выполнен с возможностью вычисления третьих пространственных координат второго положения посредством алгоритма распознавания изображения.
[00190] Модуль 460 коррекции выполнен с возможностью коррекции вторых пространственных координат согласно третьим пространственным координатам, для получения скорректированных вторых пространственных координат.
[00191] Фиг. 12 является блок-схемой другого устройства автоматической фокусировки согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения. Как показано на фиг. 12, на основе предшествующего варианта осуществления, показанного на фиг. 11, модуль 460 коррекции может включать в себя: подмодуль 461 оценивания порога коррекции и подмодуль 462 вычисления скорректированного значения координаты.
[00192] Подмодуль 461 оценивания порога коррекции выполнен с возможностью оценивания, является ли расстояние между третьими пространственными координатами и вторыми пространственными координатами меньшим, чем заданный порог коррекции.
[00193] Подмодуль 462 вычисления скорректированного значения координаты выполнен с возможностью, когда расстояние между третьими пространственными координатами и вторыми пространственными координатами является меньшим, чем заданный порог коррекции, вычисления среднего значения значений координат по оси X в третьих пространственных координатах и вторых пространственных координатах, в качестве значения координаты по оси X в скорректированных вторых пространственных координатах, и вычисления среднего значения значений координат по оси Y в третьих пространственных координатах и вторых пространственных координатах, в качестве значения координаты по оси Y в скорректированных вторых пространственных координатах, и вычисления значения координаты по оси Z в скорректированных вторых пространственных координатах, согласно первому прямолинейному расстоянию, значению координаты по оси X в скорректированных вторых пространственных координатах, и значению координаты по оси Y в скорректированных вторых пространственных координатах.
[00194] Согласно упомянутому выше варианту осуществления, вторые пространственные координаты могут также быть скорректированы посредством третьих пространственных координат, вычисляемых с использованием алгоритма распознавания изображения, перед выполнением автоматической фокусировки, согласно вторым пространственным координатам, и, таким образом, точность автоматической фокусировки может быть дополнительно улучшена.
[00195] Таким образом, данное раскрытие сущности изобретения также обеспечивает другое устройство автоматической фокусировки, включающее в себя процессор, и запоминающее устройство для хранения команд, которые могут быть выполнены процессором; причем процессор выполнен с возможностью выполнения:
[00196] при завершении ручной фокусировки посредством касания целевого объекта в видоискателе пользователем, приобретения первых пространственных данных целевого объекта;
[00197] при детектировании изменения содержимого найденного вида в видоискателе, получения данных изменения положения;
[00198] вычисления вторых пространственных данных целевого объекта согласно первым пространственным данным и данным изменения положения; и
[00199] выполнения автоматической фокусировки на целевом объекте согласно вторым пространственным данным.
[00200] Для подробных реализаций функций и действий соответствующих модулей в устройствах, следует обратиться к подробным реализациям соответствующих стадий в приведенных выше способах, и повторяющиеся описания будут здесь опущены.
[00201] В отношении вариантов осуществления устройства, поскольку они, по существу, соответствуют вариантам осуществления способа, может быть сделана ссылка на разъяснения в отношении вариантов осуществления способа для соответствующих участков. Варианты осуществления устройства, описанные выше, являются только иллюстративными, причем модули, показанные в виде отдельных частей, могут либо не быть физически отдельными, либо части, показанные посредством модулей, могут либо быть физическими модулями, либо не быть, т.е., эти части могут либо быть расположены в одном месте, либо могут быть распределены по множеству сетевых модулей. Задача данного раскрытия сущности изобретения может быть реализована посредством выбора части или всех модулей здесь согласно фактической необходимости. Приведенное выше содержание может быть понято и осуществлено на практике специалистами в данной области техники без творческих усилий.
[00202] Фиг. 13 является структурной схемой устройства 1300 для автоматической фокусировки согласно иллюстративному варианту осуществления данного раскрытия сущности изобретения. Например, устройство 1300 может быть мобильным телефоном, имеющим функцию маршрутизации, компьютером, цифровым широковещательным терминалом, устройством обмена сообщениями, игровой консолью, планшетным компьютером, медицинским устройством, тренажерным оборудованием, персональным цифровым секретарем, и т.п.
[00203] Со ссылкой на фиг. 13, устройство 1300 может включать в себя один или несколько из следующих компонентов: компонент 1302 обработки, запоминающее устройство 1304, компонент 1306 электропитания, мультимедийный компонент 1308, звуковой компонент 1310, интерфейс 1313 ввода/вывода, компонент 1314 датчика, и компонент 1316 связи.
[00204] Компонент 1302 обработки обычно управляет общими операциями устройства 1300, такими как операции, связанные с отображением, телефонными вызовами, обменом данными, операциями камеры, и операциями записи. Компонент 1302 обработки может включать в себя один или несколько процессоров 1320 для исполнения команд для выполнения всех или части стадий в вышеописанных способах. Кроме того, компонент 1302 обработки может включать в себя один или несколько модулей, которые облегчают взаимодействие между компонентом 1302 обработки и другими компонентами. Например, компонент 1302 обработки может включать в себя мультимедийный модуль для облегчения взаимодействия между мультимедийным компонентом 1308 и компонентом 1302 обработки.
[00205] Запоминающее устройство 1304 выполнено с возможностью хранения различных типов данных для поддержки функционирования устройства 1300. Примеры таких данных включают в себя команды для любых приложений или способов, функционирующих в устройстве 1300, контактные данные, данные телефонной книги, сообщения, изображения, видео, и т.д. Запоминающее устройство 1304 может быть реализовано с использованием любого типа энергозависимых или энергонезависимых запоминающих устройств, или их комбинации, таких как статическое запоминающее устройство с произвольной выборкой (SRAM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), электрически программируемое постоянное запоминающее устройство (EPROM), программируемое постоянное запоминающее устройство (PROM), постоянное запоминающее устройство (ROM), магнитное запоминающее устройство, флэш-память, магнитный или оптический диск.
[00206] Компонент 1306 электропитания обеспечивает электропитание для различных компонентов устройства 1300. Компонент 1306 электропитания может включать в себя систему управления электропитанием, один или несколько источников электропитания, и любые другие компоненты, связанные с генерацией, управлением, и распределением электропитания в устройстве 1300.
[00207] Мультимедийный компонент 1308 включает в себя экран, обеспечивающий выходной интерфейс между устройством 1300 и пользователем. В некоторых вариантах осуществления, экран может включать в себя жидкокристаллический дисплей (LCD), и сенсорную панель (TP). Если экран включает в себя сенсорную панель, то экран может быть реализован в виде сенсорного экрана для приема входных сигналов от пользователя. Сенсорная панель включает в себя один или несколько датчиков касания для восприятия касаний, проведений пальцем, и жестов на сенсорной панели. Датчики касания могут не только воспринимать границу касания или действия проведения пальцем, но, также, могут воспринимать период времени и давление, связанные с касанием или действием проведения пальцем. В некоторых вариантах осуществления, мультимедийный компонент 1308 включает в себя переднюю камеру и/или заднюю камеру. Передняя камера и/или задняя камера могут принимать внешний мультимедийный элемент данных, при нахождении устройства 1300 в рабочем режиме, таком как режим фотографирования или видеорежим. Каждая из передней камеры и задней камеры может быть системой с фиксированным оптическим объективом или может иметь способность фокусировки и оптического масштабирования.
[00208] Звуковой компонент 1310 выполнен с возможностью вывода и/или ввода звуковых сигналов. Например, звуковой компонент 1310 включает в себя микрофон ("MIC"), выполненный с возможностью приема внешнего звукового сигнала, когда устройство 1300 находится в рабочем режиме, таком как режим вызова, режим записи, и режим распознавания речи. Принимаемый звуковой сигнал может быть дополнительно сохранен в запоминающем устройстве 1304 или передан через компонент 1316 связи. В некоторых вариантах осуществления, звуковой компонент 1310 дополнительно включает в себя громкоговоритель для вывода звуковых сигналов.
[00209] Интерфейс 1313 ввода/вывода обеспечивает интерфейс между компонентом 1302 обработки и периферийными модулями интерфейса, такими как клавиатура, колесо прокрутки, кнопки, и т.п. Кнопки могут включать в себя, но не ограничены этим, кнопку возврата в исходное положение, кнопку громкости, кнопку включения, и кнопку блокировки.
[00210] Компонент 1314 датчика включает в себя один или несколько датчиков для обеспечения оценок состояния различных аспектов устройства 1300. Например, компонент 1314 датчика может детектировать открытое/закрытое состояние устройства 1300, относительное расположение компонентов, например, дисплея и клавиатуры, устройства 1300, изменение положения устройства 1300 или компонента устройства 1300, наличие или отсутствие пользовательского контакта с устройством 1300, ориентацию или ускорение/замедление устройства 1300, и изменение температуры устройства 1300. Компонент 1314 датчика может включать в себя датчик близости, выполненный с возможностью детектирования наличия близких объектов, без физического контакта. Компонент 1314 датчика может также включать в себя световой датчик, такой как датчик изображения CMOS или CCD, для использования в применениях формирования изображения. В некоторых вариантах осуществления, компонент 1314 датчика может также включать в себя датчик-акселерометр, гироскопический датчик, магнитный датчик, датчик СВЧ-излучения, или датчик температуры.
[00211] Компонент 1316 связи выполнен с возможностью обеспечения связи, проводным или беспроводным способом, между устройством 1300 и другими устройствами. Устройство 1300 может обращаться к беспроводной сети на основе стандарта связи, такого как WiFi, 2G, или 3G, или их комбинации. В одном иллюстративном варианте осуществления, компонент 1316 связи принимает широковещательный сигнал или информацию, связанную с широковещанием, от внешней широковещательной системы управления через широковещательный канал. В одном иллюстративном варианте осуществления, компонент 1316 связи дополнительно включает в себя модуль радиосвязи на короткие расстояния (NFC) для облегчения связи ближнего действия. Например, модуль NFC может быть реализован на основе технологии радиочастотной идентификации (RFID), технологии ассоциации инфракрасной техники передачи данных (IrDA), сверхширокополосной (UWB) технологии, технологии Bluetooth (BT), и других технологий.
[00212] В иллюстративных вариантах осуществления, устройство 1300 может быть реализовано с использованием одной или нескольких специализированных интегральных схем (ASIC), цифровых сигнальных процессоров (DSP), цифровых устройств обработки сигналов (DSPD), программируемых логических устройств (PLD), матриц программируемых логических вентилей (FPGA), контроллеров, микроконтроллеров, микропроцессоров, или других электронных компонентов, для выполнения описанных выше способов.
[00213] В иллюстративных вариантах осуществления, также обеспечивают энергонезависимый машиночитаемый носитель данных, включающий в себя команды, такие как команды, включенные в запоминающее устройство 1304, исполняемые процессором 1320 в устройстве 1300, для выполнения описанных выше способов. Например, энергонезависимый машиночитаемый носитель данных может быть ROM, RAM, CD-ROM, магнитной лентой, гибким диском, оптическим устройством хранения данных, и т.п.
Энергонезависимый машиночитаемый носитель данных, при выполнении команды в носителе данных процессором терминала, обеспечивает возможность выполнения терминалом способа автоматической фокусировки, причем этот способ включает в себя: при завершении ручной фокусировки посредством касания целевого объекта в видоискателе пользователем, получение первых пространственных данных целевого объекта; при детектировании изменения содержимого найденного вида в видоискателе, получение данных изменения положения; вычисление вторых пространственных данных целевого объекта согласно первым пространственным данным и данным изменения положения; и выполнение автоматической фокусировки на целевом объекте согласно вторым пространственным данным.
[00214] Другие варианты осуществления данного изобретения будут очевидны специалистам в данной области техники из рассмотрения описания и осуществления на практике изобретения, описанного здесь. Данное изобретение предназначено для охвата любых вариаций, применений, или приспособлений данного изобретения, отвечающих общим принципам данного изобретения и включая такие отступления от данного изобретения, как попадание в пределы общеизвестной или общепринятой практики в данной области техники. Предполагается, что данное описание и примеры должны рассматриваться только в качестве иллюстративных, в пределах объема и сущности данного изобретения, указанных посредством нижеследующей формулы изобретения.
[00215] Следует понимать, что данное изобретение не ограничено точной структурой, которая описана выше и показана в сопутствующих чертежах, и что различные модификации и изменения могут быть выполнены, не выходя за рамки объема данного изобретения. Предполагается, что объем данного изобретения должен быть ограничен только приложенной формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЛЕГЧЕНИЯ ФОКУСИРОВКИ | 2007 |
|
RU2466438C2 |
| ЦИФРОВАЯ КАМЕРА С СИСТЕМОЙ ТРИАНГУЛЯЦИОННОЙ АВТОМАТИЧЕСКОЙ ФОКУСИРОВКИ И СВЯЗАННЫЙ С НЕЙ СПОСОБ | 2006 |
|
RU2447609C2 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЗАХВАТА ИЗОБРАЖЕНИЯ | 2010 |
|
RU2498376C2 |
| УСТРОЙСТВО СЪЕМКИ ИЗОБРАЖЕНИЯ | 2012 |
|
RU2574325C2 |
| СФОКУСИРОВАННЫЙ УЛЬТРАЗВУК ВЫСОКОЙ ИНТЕНСИВНОСТИ ДЛЯ НАГРЕВА ЦЕЛЕВОЙ ЗОНЫ, БОЛЬШЕЙ, ЧЕМ ЭЛЕКТРОННАЯ ЗОНА ФОКУСИРОВКИ | 2013 |
|
RU2635481C2 |
| ДВУХФОТОННЫЙ СКАНИРУЮЩИЙ МИКРОСКОП С АВТОМАТИЧЕСКОЙ ТОЧНОЙ ФОКУСИРОВКОЙ ИЗОБРАЖЕНИЯ И СПОСОБ АВТОМАТИЧЕСКОЙ ТОЧНОЙ ФОКУСИРОВКИ ИЗОБРАЖЕНИЯ | 2012 |
|
RU2515341C2 |
| ЛИНЗОВОЕ УСТРОЙСТВО И ФОТОКАМЕРА | 2008 |
|
RU2399942C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТЕЙ ДО ОБЪЕКТОВ ПО ИЗОБРАЖЕНИЯМ С ЦИФРОВЫХ ВИДЕОКАМЕР | 2016 |
|
RU2626051C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОРРЕКЦИИ ПАРАМЕТРОВ СТАБИЛИЗАТОРА ВООРУЖЕНИЯ | 2017 |
|
RU2667664C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТОВ ПО ИХ ИЗОБРАЖЕНИЯМ ПРЕИМУЩЕСТВЕННО В КОСМОСЕ | 2014 |
|
RU2568335C1 |
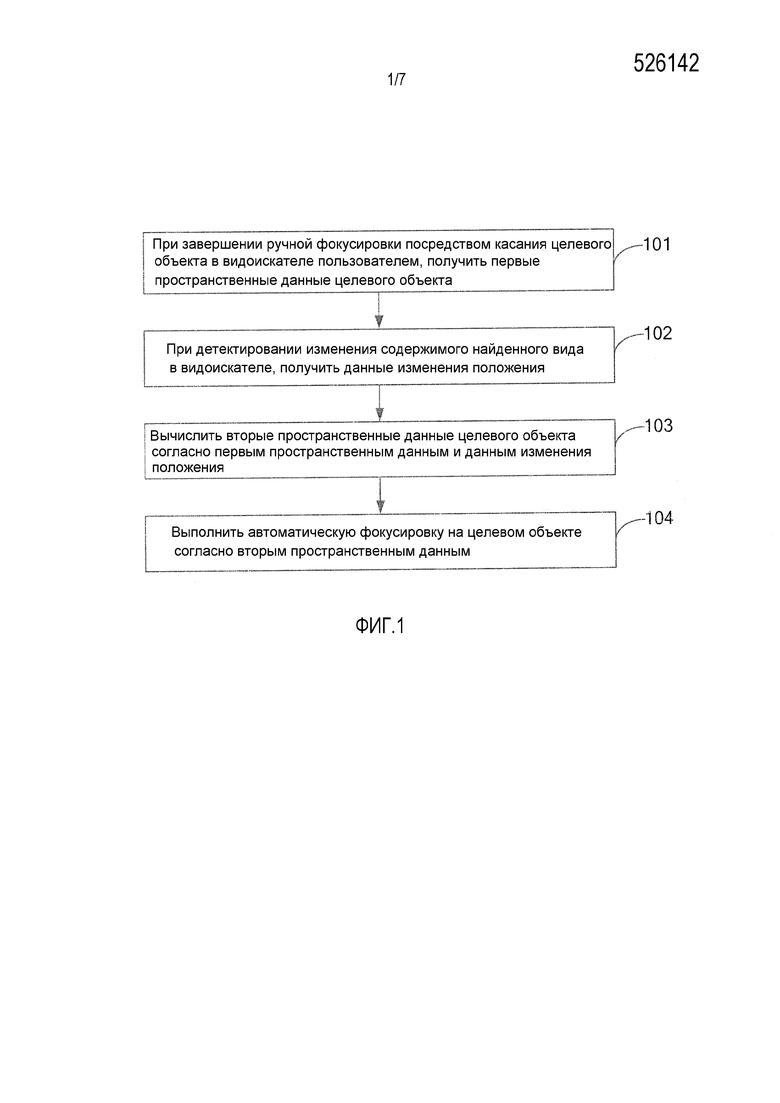
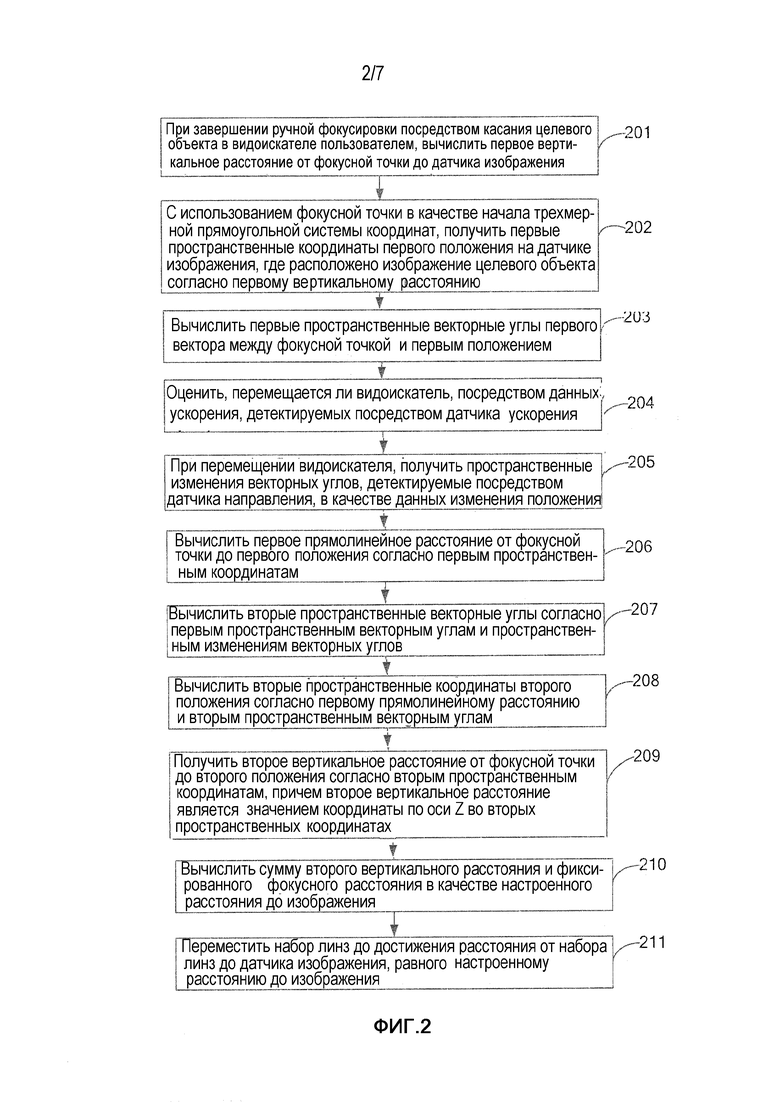
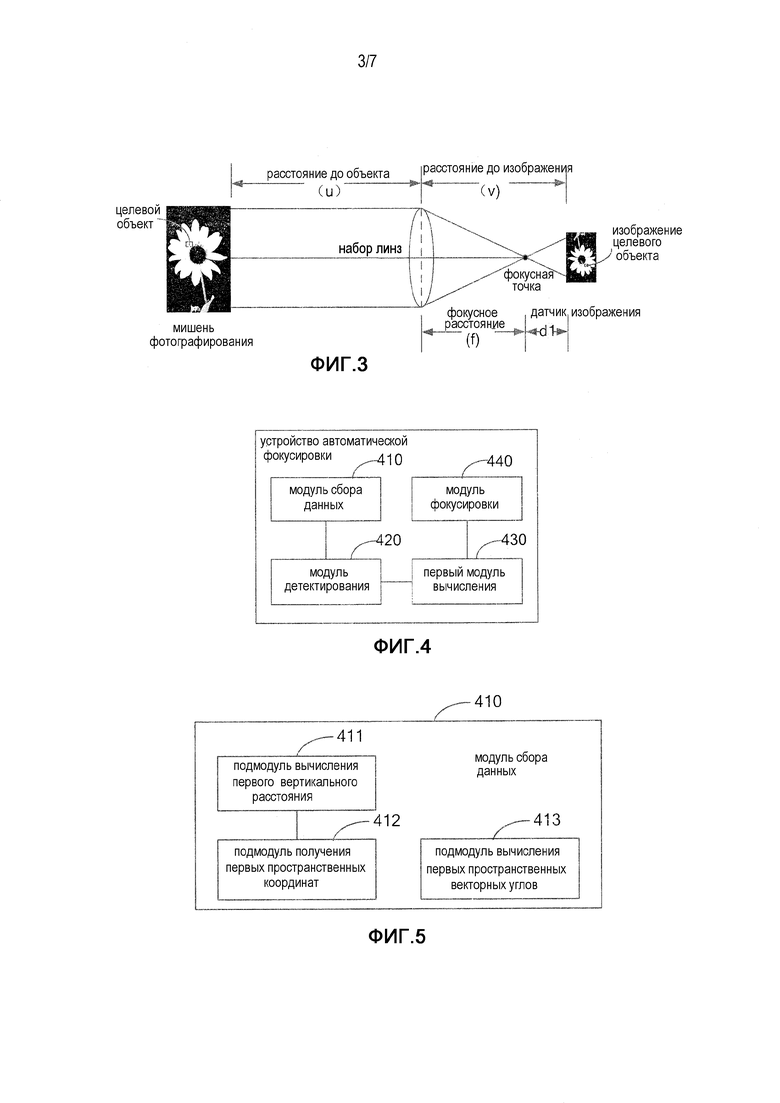
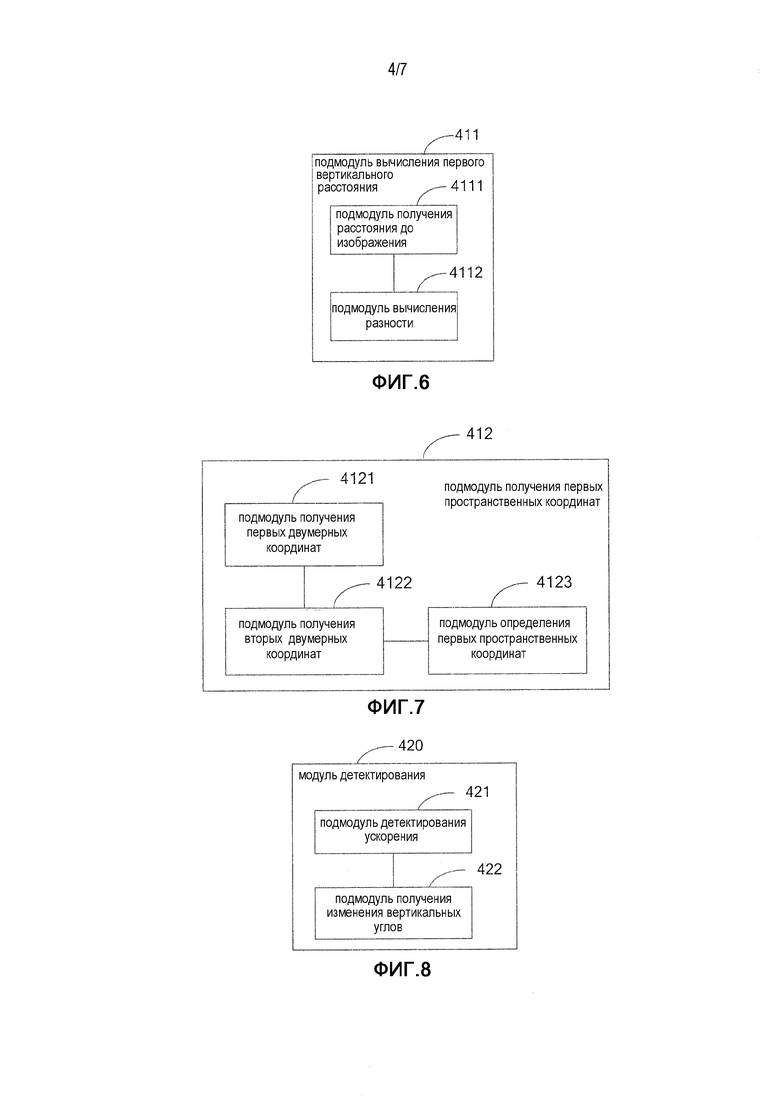
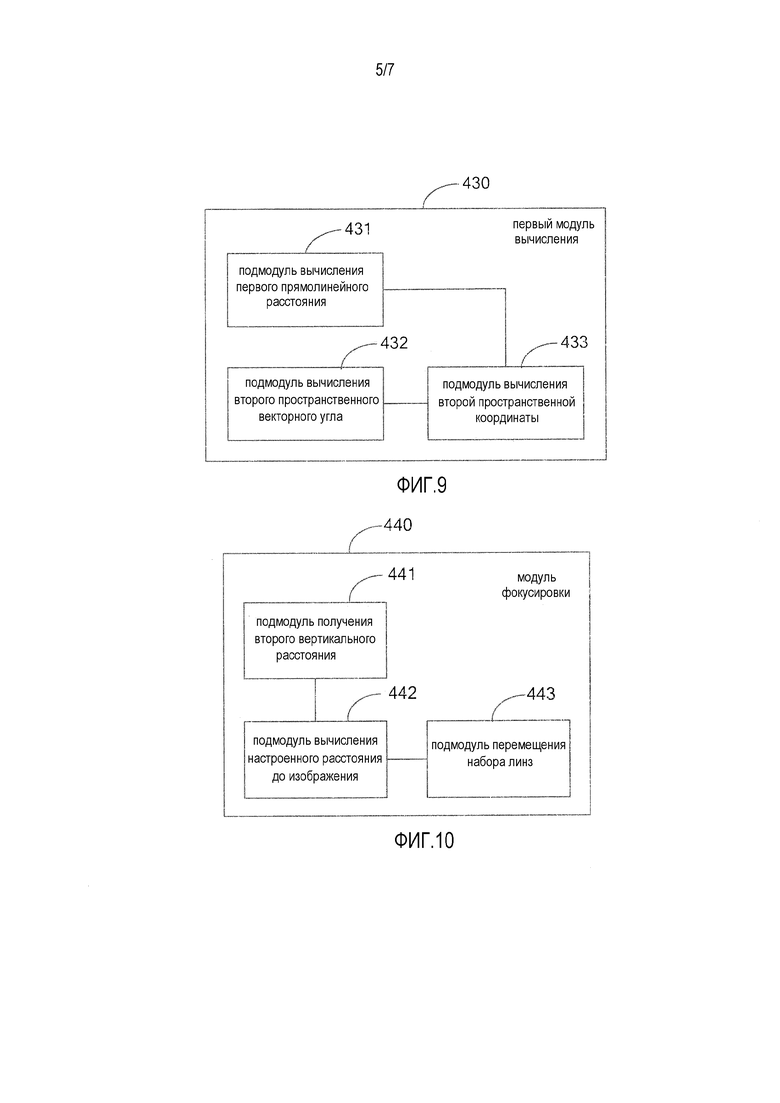
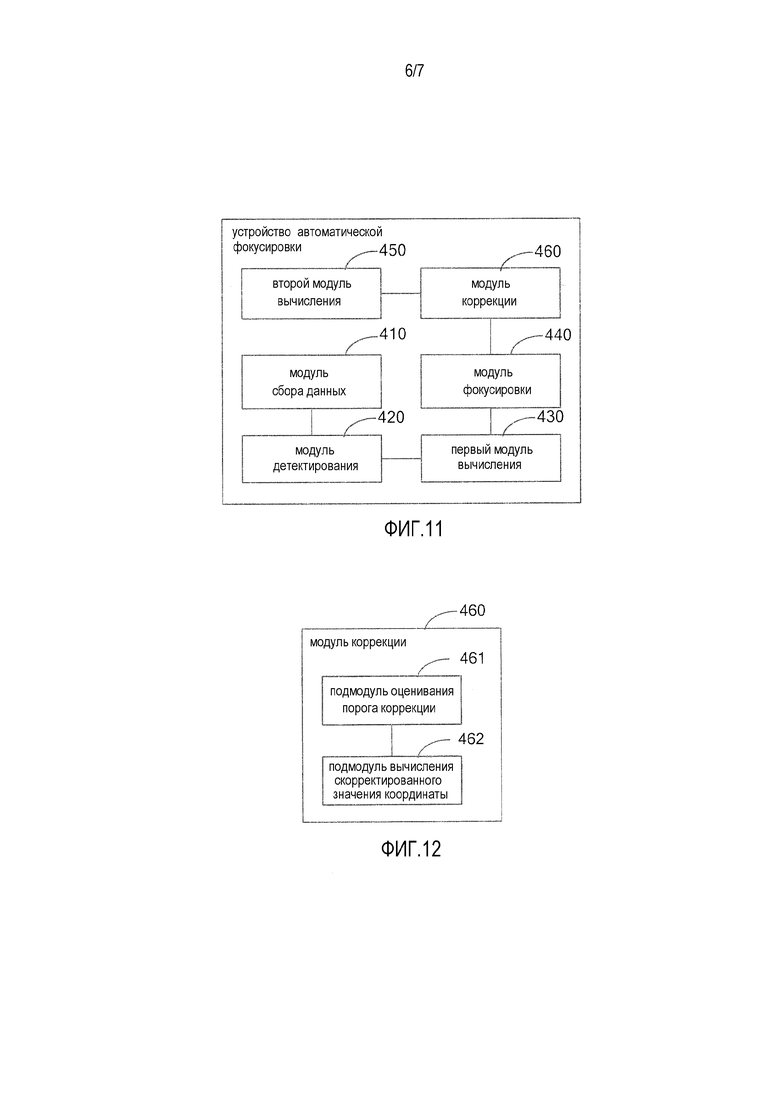
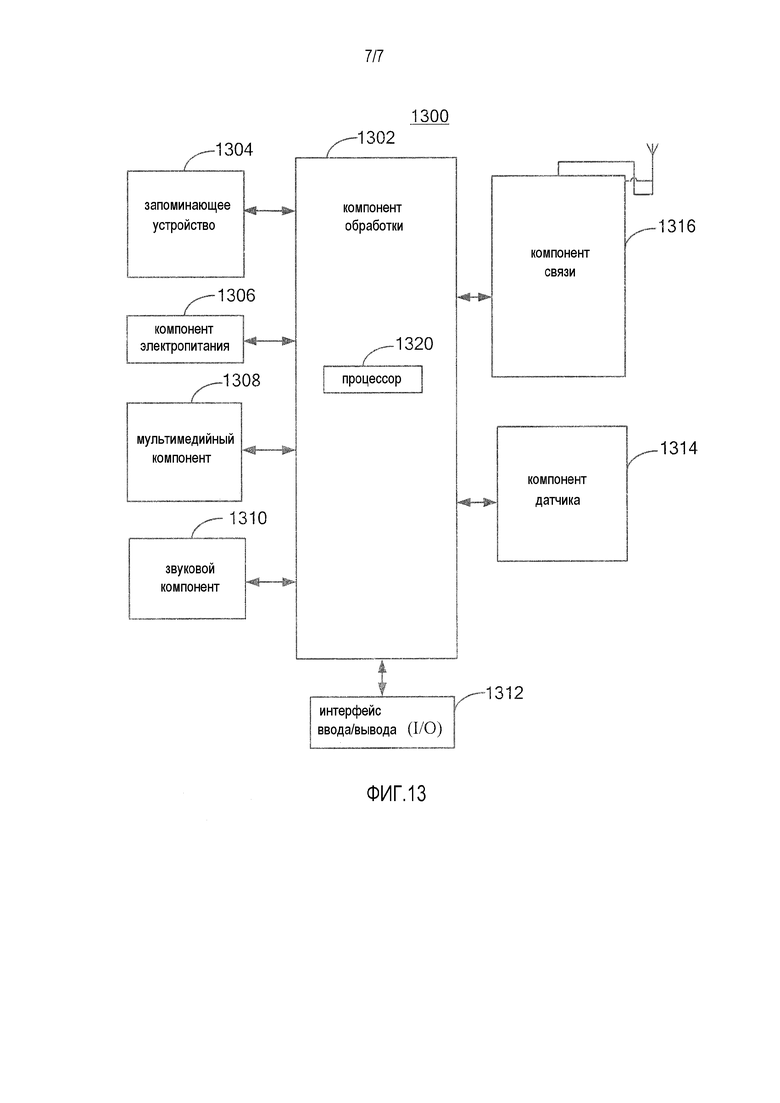
Способ автоматической фокусировки включает в себя выбор объекта на видоискателе при помощи касания, получение первых пространственных данных целевого объекта. Далее производится определение изменения положения объекта на основании содержимого изображения на видоискателе. Вычисление вторых пространственных данных целевого объекта согласно первым пространственным данным и данным изменения положения. Выполнение автоматической фокусировки на целевом объекте согласно вторым пространственным данным. Технический результат заключается в обеспечении возможности автоматической фокусировки движущегося объекта за счёт устранения операции ручной фокусировки при изменении содержимого найденного вида. 3 н. и 16 з.п. ф-лы, 13 ил.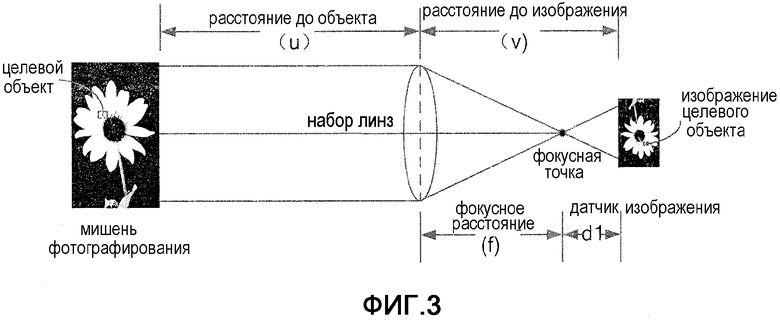
1. Способ автоматической фокусировки, отличающийся тем, что этот способ содержит:
при завершении ручной фокусировки посредством касания целевого объекта в видоискателе пользователем, получение первых пространственных данных целевого объекта;
при детектировании изменения содержимого найденного вида в видоискателе, получение данных изменения положения;
вычисление вторых пространственных данных целевого объекта согласно первым пространственным данным и данным изменения положения; и
выполнение автоматической фокусировки на целевом объекте согласно вторым пространственным данным.
2. Способ по п. 1, отличающийся тем, что получение первых пространственных данных целевого объекта содержит:
вычисление первого расстояния от фокусной точки до датчика изображения, причем изображение целевого объекта формируют на датчике изображения при завершении ручной фокусировки;
получение первых пространственных координат первого положения на датчике изображения, где расположено изображение целевого объекта, согласно первому расстоянию, с использованием фокусной точки в качестве начала трехмерной прямоугольной системы координат; и
вычисление первых пространственных векторных углов первого вектора между фокусной точкой и первым положением.
3. Способ по п. 2, отличающийся тем, что вычисление первого расстояния от фокусной точки до датчика изображения содержит:
получение расстояния до изображения при завершении ручной фокусировки; и
вычисление разности между расстоянием до изображения и фиксированным фокусным расстоянием в качестве первого расстояния от фокусной точки до датчика изображения.
4. Способ по п. 2, отличающийся тем, что получение первых пространственных координат первого положения на датчике изображения, где расположено изображение целевого объекта, согласно первому расстоянию, содержит:
с использованием центра видоискателя в качестве начала прямоугольной плоской системы координат, получение первых двумерных координат целевого объекта в прямоугольной плоской системе координат, причем центр видоискателя и фокусная точка находятся на одном и том же направлении нормали;
преобразование первых двумерных координат согласно заданному масштабу для получения вторых двумерных координат изображения целевого объекта на датчике изображения; и
определение первых пространственных координат изображения целевого объекта на датчике изображения согласно вторым двумерным координатам и первому расстоянию, причем первые пространственные координаты состоят из значения координаты по оси X, значения координаты по оси Y и значения координаты по оси Z, причем значение координаты по оси X в первых пространственных координатах соответствует значению координаты по оси X во вторых двумерных координатах, значение координаты по оси Y в первых пространственных координатах соответствует значению координаты по оси Y во вторых двумерных координатах, и значение координаты по оси Z в первых пространственных координатах соответствует первому расстоянию.
5. Способ по п. 2, отличающийся тем, что получение данных изменения положения при детектировании изменения содержимого найденного вида в видоискателе, содержит:
оценивание, перемещается ли видоискатель, посредством данных ускорения, детектируемых посредством датчика ускорения; и
при перемещении видоискателя, получение одного или более пространственных изменений векторных углов, детектируемых посредством датчика направления, в качестве данных изменения положения.
6. Способ по п. 5, отличающийся тем, что вычисление вторых пространственных данных целевого объекта, согласно первым пространственным данным и данным изменения положения, содержит:
вычисление первого прямолинейного расстояния от фокусной точки до первого положения, согласно первым пространственным координатам;
вычисление одного или более вторых пространственных векторных углов согласно одному или более первым пространственным векторным углам и одному или более пространственным изменениям векторных углов, причем один или более вторых пространственных векторных углов являются одним или более пространственными векторными углами второго вектора между фокусной точкой и вторым положением, и, причем, второе положение является положением изображения целевого объекта на датчике изображения после завершения автоматической фокусировки; и
вычисление одной или более вторых пространственных координат второго положения согласно первому прямолинейному расстоянию и одному или более вторым пространственным векторным углам.
7. Способ по п. 6, отличающийся тем, что выполнение автоматической фокусировки на целевом объекте согласно вторым пространственным данным, содержит:
получение второго расстояния от фокусной точки до второго положения согласно одной или более вторым пространственным координатам, причем второе расстояние является значением координаты по оси Z в одних или более вторых пространственных координатах;
вычисление суммы второго расстояния и фиксированного фокусного расстояния в качестве настроенного расстояния до изображения; и
перемещение набора линз до достижения расстояния от набора линз до датчика изображения, равного настроенному расстоянию до изображения.
8. Способ по п. 6 или 7, отличающийся тем, что перед выполнением автоматической фокусировки на целевом объекте согласно вторым пространственным данным способ содержит:
вычисление третьих пространственных координат второго положения посредством алгоритма распознавания изображения; и
коррекцию вторых пространственных координат согласно третьим пространственным координатам для получения скорректированных вторых пространственных координат.
9. Способ по п. 8, отличающийся тем, что коррекция вторых пространственных координат согласно третьим пространственным координатам, для получения настроенных вторых пространственных координат, содержит:
оценивание, является ли расстояние между третьими пространственными координатами и вторыми пространственными координатами меньшим, чем заданный порог коррекции;
когда расстояние между третьими пространственными координатами и вторыми пространственными координатами является меньшим, чем заданный порог коррекции, вычисление среднего значения значений координат по оси X в третьих пространственных координатах и вторых пространственных координатах в качестве значения координаты по оси X в скорректированных вторых пространственных координатах, и вычисление среднего значения значений координат по оси Y в третьих пространственных координатах и вторых пространственных координатах в качестве значения координаты по оси Y в скорректированных вторых пространственных координатах; и
вычисление значения координаты по оси Z в скорректированных вторых пространственных координатах согласно первому прямолинейному расстоянию, значению координаты по оси X в скорректированных вторых пространственных координатах и значению координаты по оси Y в скорректированных вторых пространственных координатах.
10. Устройство автоматической фокусировки, отличающееся тем, что устройство содержит:
модуль сбора данных, выполненный с возможностью, при завершении ручной фокусировки посредством касания целевого объекта в видоискателе пользователем, получения первых пространственных данных целевого объекта;
модуль детектирования, выполненный с возможностью, при детектировании изменения содержимого найденного вида в видоискателе, получения данных изменения положения;
первый модуль вычисления, выполненный с возможностью вычисления вторых пространственных данных целевого объекта согласно первым пространственным данным и данным изменения положения; и
модуль фокусировки, выполненный с возможностью выполнения автоматической фокусировки на целевом объекте согласно вторым пространственным данным.
11. Устройство по п. 10, отличающееся тем, что модуль сбора данных содержит:
подмодуль вычисления первого расстояния, выполненный с возможностью вычисления первого расстояния от фокусной точки до датчика изображения, причем изображение целевого объекта формируют на датчике изображения при завершении ручной фокусировки;
подмодуль получения первых пространственных координат, выполненный с возможностью получения первых пространственных координат первого положения на датчике изображения, где расположено изображение целевого объекта, согласно первому расстоянию, с использованием фокусной точки в качестве начала трехмерной прямоугольной системы координат; и
подмодуль вычисления первых пространственных векторных углов, выполненный с возможностью вычисления первых пространственных векторных углов первого вектора между фокусной точкой и первым положением.
12. Устройство по п. 11, отличающееся тем, что подмодуль вычисления первого расстояния содержит:
подмодуль получения расстояния до изображения, выполненный с возможностью получения расстояния до изображения при завершении ручной фокусировки; и
подмодуль вычисления разности, выполненный с возможностью вычисления разности между расстоянием до изображения и фиксированным фокусным расстоянием, в качестве первого расстояния от фокусной точки до датчика изображения.
13. Устройство по п. 11, отличающееся тем, что подмодуль получения первых пространственных координат содержит:
подмодуль получения первых двумерных координат, выполненный с возможностью, с использованием центра видоискателя в качестве начала прямоугольной плоской системы координат, получения первых двумерных координат целевого объекта в прямоугольной плоской системе координат, причем центр видоискателя и фокусная точка находятся на одном и том же направлении нормали;
подмодуль получения вторых двумерных координат, выполненный с возможностью преобразования первых двумерных координат согласно заданному масштабу, для получения вторых двумерных координат изображения целевого объекта на датчике изображения; и
подмодуль определения первых пространственных координат, выполненный с возможностью определения первых пространственных координат изображения целевого объекта на датчике изображения согласно вторым двумерным координатам и первому расстоянию, причем первые пространственные координаты состоят из значения координаты по оси X, значения координаты по оси Y и значения координаты по оси Z, причем значение координаты по оси X в первых пространственных координатах соответствует значению координаты по оси X во вторых двумерных координатах, значение координаты по оси Y в первых пространственных координатах соответствует значению координаты по оси Y во вторых двумерных координатах, и значение координаты по оси Z в первых пространственных координатах соответствует первому расстоянию.
14. Устройство по п. 11, отличающееся тем, что модуль детектирования содержит:
подмодуль детектирования ускорения, выполненный с возможностью оценивания, перемещается ли видоискатель, посредством данных ускорения, детектируемых посредством датчика ускорения; и
подмодуль получения изменения векторного угла, выполненный с возможностью, при перемещении видоискателя, получения одного или нескольких пространственных изменений векторных углов, детектируемых посредством датчика направления, в качестве данных изменения положения.
15. Устройство по п. 14, отличающееся тем, что первый модуль вычисления содержит:
подмодуль вычисления первого прямолинейного расстояния, выполненный с возможностью вычисления первого прямолинейного расстояния от фокусной точки до первого положения, согласно первым пространственным координатам;
подмодуль вычисления второго пространственного векторного угла, выполненный с возможностью вычисления одного или более вторых пространственных векторных углов согласно одному или более первым пространственным векторным углам и одному или более пространственным изменениям векторных углов, причем один или более вторых пространственных векторных углов являются одним или более пространственными векторными углами второго вектора между фокусной точкой и вторым положением, и, причем, второе положение является положением изображения целевого объекта на датчике изображения после завершения автоматической фокусировки; и
подмодуль вычисления второй пространственной координаты, выполненный с возможностью вычисления одной или более вторых пространственных координат второго положения согласно первому прямолинейному расстоянию и одному или более вторым пространственным векторным углам.
16. Устройство по п. 15, отличающееся тем, что модуль фокусировки содержит:
подмодуль получения второго расстояния, выполненный с возможностью получения второго расстояния от фокусной точки до второго положения согласно одной или более вторым пространственным координатам, причем второе расстояние является значением координаты по оси Z в одних или более вторых пространственных координатах;
подмодуль вычисления настроенного расстояния до изображения, выполненный с возможностью вычисления суммы второго расстояния и фиксированного фокусного расстояния, в качестве настроенного расстояния до изображения; и
подмодуль перемещения набора линз, выполненный с возможностью перемещения набора линз до достижения расстояния от набора линз до датчика изображения, равного настроенному расстоянию до изображения.
17. Устройство по п. 15 или 16, отличающееся тем, что устройство дополнительно содержит:
второй модуль вычисления, выполненный с возможностью вычисления третьих пространственных координат второго положения посредством алгоритма распознавания изображения; и
модуль коррекции, выполненный с возможностью коррекции вторых пространственных координат согласно третьим пространственным координатам, для получения скорректированных вторых пространственных координат.
18. Устройство по п. 17, отличающееся тем, что модуль коррекции содержит:
подмодуль оценивания порога коррекции, выполненный с возможностью оценивания, является ли расстояние между третьими пространственными координатами и вторыми пространственными координатами меньшим, чем заданный порог коррекции; и
подмодуль вычисления скорректированного значения координаты, выполненный с возможностью, когда расстояние между третьими пространственными координатами и вторыми пространственными координатами является меньшим, чем заданный порог коррекции, вычисления среднего значения значений координат по оси X в третьих пространственных координатах и вторых пространственных координатах в качестве значения координаты по оси X в скорректированных вторых пространственных координатах, и вычисления среднего значения значений координат по оси Y в третьих пространственных координатах и вторых пространственных координатах в качестве значения координаты по оси Y в скорректированных вторых пространственных координатах, и вычисления значения координаты по оси Z в скорректированных вторых пространственных координатах согласно первому прямолинейному расстоянию, значению координаты по оси X в скорректированных вторых пространственных координатах и значению координаты по оси Y в скорректированных вторых пространственных координатах.
19. Устройство автоматической фокусировки, отличающееся тем, что устройство содержит:
процессор; и
запоминающее устройство для сохранения инструкций, которые могут быть выполнены процессором;
причем процессор выполнен с возможностью выполнения:
при завершении ручной фокусировки посредством касания целевого объекта в видоискателе пользователем, получения первых пространственных данных целевого объекта;
при детектировании изменения содержимого найденного вида в видоискателе, получения данных изменения положения;
вычисления вторых пространственных данных целевого объекта согласно первым пространственным данным и данным изменения положения; и
выполнения автоматической фокусировки на целевом объекте согласно вторым пространственным данным.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| US 20100020222 A1 28.01.2010 | |||
| WO 2012163393 A1 06.12.2012 | |||
| US 20020080257 A1 27.06.2002. | |||

