ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к сфокусированному ультразвуку высокой интенсивности, в частности к сфокусированному ультразвуку высокой интенсивности под контролем магнитного резонанса.
УРОВЕНЬ ТЕХНИКИ
Изобретение относится к системе терапии сфокусированным ультразвуком высокой интенсивности под контролем магнитно-резонансной визуализации (HIFU). Модуль HIFU содержит преобразователь ультразвука (решетку преобразователей) с элементами преобразователя, которые испускают пучки HIFU. Фокус может регулироваться по локальному диапазону посредством электронного контроля фазы каждого элемента (электронное управление).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение предоставляет медицинский инструмент и компьютерный программный продукт в независимых пунктах формулы изобретения. Варианты осуществления даются в зависимых пунктах формулы изобретения.
Согласно одному из вариантов осуществления изобретения большая целевая область, в которую должна быть внесена ультразвуковая (US) энергия, сегментируется на несколько локальных областей. В пределах индивидуальных локальных областей US энергия вносится посредством сканирования фокуса в локальной области посредством электронного регулирования. Далее преобразователь (решетка преобразователей) переустанавливается для каждой из локальных областей.
Изобретение может обеспечить возможность применения обработки HIFU (посредством внесения ультразвуковой энергии) в большой целевой области произвольной формы.
'Машиночитаемый носитель информации' при использовании в настоящем описании охватывает любой материальный носитель информации, на котором могут храниться инструкции, которые являются исполнимыми процессором вычислительного устройства. Машиночитаемый носитель информации может также называться постоянным машиночитаемым носителем информации. Машиночитаемый носитель информации может также называться материальным машиночитаемым носителем информации. В некоторых вариантах осуществления машиночитаемый носитель информации может также быть в состоянии хранить данные, к которым может осуществлять доступ процессор вычислительного устройства. Примеры машиночитаемых носителей информации включают, но не ограничиваются указанным: гибкий диск, магнитный жесткий диск, твердотельный жесткий диск, флэш-память, карту флэш-памяти USB, оперативную память (RAM), постоянную память (ROM), оптический диск, магнитооптический диск и регистровый файл процессора. Примеры оптических дисков включают компакт-диски (CD) и цифровые универсальные диски (DVD), например CD-ROM, CD-RW, CD-R, DVD-ROM, DVD-RW или диски DVD-R. Термин "машиночитаемый носитель информации" также относится к различным типам сред записи, к которым может осуществлять доступ компьютерное устройство через сеть или линию связи. Например, данные могут быть получены по модему, через Интернет или по локальной сети.
'Память компьютера', или 'память', является примером читаемого компьютером носителя информации. Память компьютера представляет собой любую память, которая непосредственно доступна процессору. Примеры памяти компьютера включают, но не ограничиваются указанным: оперативную память, регистры и регистровые файлы.
'Компьютерное запоминающее устройство', или 'запоминающее устройство', является примером читаемого компьютером носителя информации. Компьютерное запоминающее устройство представляет собой любой долговременный читаемый компьютером носитель информации. Примеры компьютерного запоминающего устройства включают, но не ограничиваются указанным: жесткий диск, карту флэш-памяти USB, дисковод для гибких дисков, смарт-карту, DVD, CD-ROM и твердотельный жесткий диск. В некоторых вариантах осуществления компьютерное запоминающее устройство может также являться памятью компьютера или наоборот.
'Процессор' при использовании в настоящем описании охватывает электронный блок, который в состоянии выполнить программу или исполнимую машиной инструкцию. Ссылки на вычислительное устройство, содержащее "процессор", должны интерпретироваться как, возможно, охватывающие более одного процессора или ядра процессора. Процессор может, например, являться многоядерным процессором. Процессор может также относиться к множеству процессоров в пределах одной вычислительной системы или распределенному по множеству вычислительных систем. Термин "вычислительное устройство" должен также интерпретироваться, как, возможно, относящийся к множеству или сети вычислительных устройств, каждое из которых содержит процессор или процессоры. Инструкции многих программ выполняются на множестве процессоров, которые могут находиться в пределах одного и того же вычислительного устройства, или которые могут даже быть распределены по множеству вычислительных устройств.
'Пользовательский интерфейс' при использовании в настоящем описании представляет собой интерфейс, который позволяет пользователю или оператору взаимодействовать с компьютером или вычислительной системой. 'Пользовательский интерфейс' может также называться 'устройством интерфейса пользователя'. Пользовательский интерфейс может предоставлять информацию или данные оператору и/или принимать информацию или данные от оператора. Пользовательский интерфейс может обеспечивать возможность получения входных данных от пользователя компьютером и может выдавать выходные данные компьютера пользователю. Другими словами, пользовательский интерфейс может позволить оператору управлять или манипулировать компьютером, и интерфейс может позволить компьютеру показывать влияние управления или манипулирования оператора. Отображение данных или информации на дисплее или графическом интерфейсе пользователя является примером предоставления информации оператору. Получение данных через клавиатуру, "мышь", шаровой манипулятор, сенсорную панель, джойстик, графический планшет, ручку управления, игровой планшет, веб-камеру, гарнитуру, рычаг переключения передач, рулевое колесо, педали, проводную перчатку, танцевальный коврик, пульт дистанционного управления и акселерометр являются примерами компонентов пользовательского интерфейса, которые обеспечивают возможность приема информации или данных от оператора.
'Аппаратный интерфейс' при использовании в настоящем описании охватывает интерфейс, который позволяет процессору вычислительной системы взаимодействовать и/или управлять внешним вычислительным устройством и/или аппаратурой. Аппаратный интерфейс может позволить процессору отправлять управляющие сигналы или инструкции внешнему вычислительному устройству и/или аппаратуре. Аппаратный интерфейс может также позволить процессору обмениваться данными с внешним вычислительным устройством и/или аппаратурой. Примеры аппаратных интерфейсов включают, но не ограничиваются указанным: универсальная последовательная шина, порт IEEE 1394, параллельный порт, порт IEEE 1284, последовательный порт, порт RS-232, порт IEEE 488, соединение Bluetooth, беспроводное соединение локальной сети, соединение TCP/IP, соединение Ethernet, интерфейс управляющего напряжения, MIDI-интерфейс, интерфейс аналогового ввода, и интерфейс цифрового ввода.
'Дисплей', или 'устройство отображения', при использовании в настоящем описании охватывают устройство вывода или интерфейс пользователя, настроенный для отображения изображений или данных. Дисплей может выводить визуальные, аудио, и/или тактильные данные. Примеры дисплея включают, но не ограничиваются указанным: компьютерный монитор, телевизионный экран, сенсорный экран, тактильный электронный дисплей, экран Брайля, электронно-лучевую трубку (CRT), запоминающую трубку, бистабильный дисплей, электронную бумагу, векторный дисплей, плоский экран, вакуумный флуоресцентный дисплей (VF), дисплеи на светоизлучающих диодах (LED), электролюминесцентный дисплей (ELD), плазменные панели (PDP), жидкокристаллический дисплей (LCD), дисплеи на органических светоизлучающих диодах (OLED), проектор и шлем-дисплей.
Данные магнитного резонанса (MR) определяются в настоящем описании как записанные измерения радиочастотных сигналов, испускаемые спинами атомов, посредством антенны устройства магнитного резонанса во время сканирования магнитно-резонансной визуализации. Изображение магнитно-резонансной визуализации (MRI) определяется в настоящем описании как реконструированная двух- или трехмерная визуализация анатомических и/или функциональных данных, содержавшихся в данных магнитно-резонансной визуализации. Данная визуализация может быть выполнена с применением компьютера.
Данные медицинских изображений при использовании в настоящем описании охватывают данные, которые описывают анатомические структуры субъекта. Магнитно-резонансное изображение представляет собой один из типов данных медицинских изображений.
Данные магнитно-резонансной (MR) термометрии определяются в настоящем описании как записанные измерения радиочастотных сигналов, испускаемые спинами атомов, посредством антенны устройства магнитного резонанса во время сканирования магнитно-резонансной визуализации, которые содержат информацию, которая может использоваться для магнитно-резонансной термометрии. Магнитно-резонансная термометрия функционирует посредством измерения изменений чувствительных к температуре параметров. Примеры параметров, которые могут быть измерены во время магнитно-резонансной термометрии: сдвиг частоты протонного резонанса, коэффициент рассеяния или изменения во времени релаксации T1 и/или T2 могут использоваться для измерения температуры с использованием магнитного резонанса. Сдвиг частоты протонного резонанса является зависимым от температуры, поскольку магнитное поле, которое действует на отдельные протоны, атомы водорода, зависит от окружающего молекулярного строения. Увеличение температуры понижает молекулярный скрининг вследствие влияния температуры на водородные связи. Это приводит к зависимости протонной резонансной частоты от температуры.
'Ультразвуковое окно' при использовании в настоящем описании охватывает окно, которое имеет возможность передачи ультразвуковых волн или энергии. Обычно тонкая пленка или мембрана используются в качестве ультразвукового окна. Ультразвуковое окно может, например, быть сделано из тонкой мембраны BoPET (двухосно ориентированный полиэтилентерефталат).
В одном аспекте изобретение предоставляет медицинский инструмент, содержащий систему магнитно-резонансной визуализации для получения данных магнитного резонанса от субъекта в зоне визуализации. Медицинский инструмент также содержит систему сфокусированного ультразвука высокой интенсивности, содержащую преобразователь ультразвука с электронно-управляемым фокусом. Электронно-управляемый фокус может быть реализован посредством применения преобразователя ультразвука, который имеет множество элементов преобразователя. Фазой и/или амплитудой ультразвука можно управлять таким образом, что аддитивные и деструктивные эффекты множества сигналов ультразвука вызывают смещение положение фокуса. Система сфокусированного ультразвука высокой интенсивности дополнительно содержит механическую систему позиционирования для позиционирования преобразователя ультразвука. Механическая система позиционирования может физически перемещать преобразователь ультразвука в различные местоположения.
Как правило, механическая система позиционирования используется для грубого контроля фокуса, и электронное управление используется для точной регулировки фокуса. Электронно-управляемый фокус реализован с возможностью настройки фокуса в пределах зоны фокусировки. Зона фокусировки при использовании в настоящем описании охватывает область, выше которой интенсивность фокуса выше заранее заданной интенсивности. При электронном перемещении фокуса интенсивность ультразвука может уменьшиться. Оператор или производитель системы сфокусированного ультразвука высокой интенсивности может выбрать предел интенсивности, который определяет зону фокусировки. Местоположение зоны фокусировки зависит от положения преобразователя ультразвука. Когда преобразователь ультразвука физически перемещается механической системой позиционирования, местоположение зоны фокусировки изменяется с изменением местоположения преобразователя ультразвука.
Медицинский инструмент дополнительно содержит память для хранения исполнимых машиной инструкций. Медицинский инструмент также содержит процессор для управления медицинским инструментом. Выполнение инструкций вызывает получение процессором целевой зоны, описывающей объем в пределах субъекта. Целевая зона может также упоминаться как целевой объем. Целевая зона может, например, быть определена на графическом интерфейсе пользователя, или она может быть получена как часть схемы лечения. В любом случае целевая зона может описывать объем в пределах субъекта и может также содержать такие элементы, как анатомические ссылки, которые позволяют целевой зоне быть зарегистрированной в местоположении субъекта. Объем при использовании в настоящем описании может представлять двухмерную или трехмерную указанную целевую зону. Обычно при планировании и визуализации используются двумерные изображения. Однако эти двумерные изображения обязательно представляют объемы. В магнитно-резонансной визуализации данные обычно отображаются как "срезы" или двумерные области субъекта. Каждый воксел в двумерном изображении представляет вклад главным образом от небольшого объема. Изображения MRI реконструируются с применением преобразования Фурье, таким образом, области за пределами конкретного объема могут также вносить вклад в изображение в конкретном вокселе. Аналогично, когда область разрушается, планирование также может быть выполнено с использованием двумерных изображений. Когда цель фактически разрушается ультразвуком, ультразвук нагревает небольшой объем субъекта.
Целевая зона больше зоны фокусировки. Это может означать, что для того, чтобы разрушить ультразвуком или нагреть всю целевую зону, механическая система позиционирования должна быть перемещена более чем в одно местоположение. Выполнение исполнимых машиной инструкций также вызывает выполнение процессором разделения целевой зоны на множество подзон. Подзона может также упоминаться как подзона, подобъем или под-объем. Каждая из множества подзон имеет положение преобразователя. Когда преобразователь находится в положении преобразователя, зона фокусировки содержит подзону.
Выполнение инструкций также вызывает выполнение процессором определения последовательности для перемещения положения преобразователя в каждую из множества подзон. "Последовательность" при использовании в настоящем описании может быть широко определена как список или последовательность положений, в которые преобразователь ультразвука перемещается, с тем чтобы была выбрана каждая из множества подзон. В некоторых случаях последовательность может быть определена в процессе работы, например, через использование дерева решений. В других вариантах осуществления последовательность задается предварительно, но может быть изменена позднее посредством соответствующего алгоритма. В некоторых случаях последовательность определяет только первую подзону, которая будет нагрета, и затем алгоритм отбора, такой как дерево решений, применяется для выбора каждой из последующих подзон, которые будут нагреты.
Выполнение инструкций также вызывает выполнение процессором определения выбранной подзоны, выбираемой из множества подзон, с использованием последовательности. Каждая из подзон делится на области. Выполнение инструкций также вызывает выполнение процессором поддержания в целевой зоне целевой температуры в течение предварительно заданного периода времени посредством многократного управления механической системой позиционирования с целью перемещения преобразователя в положение преобразователя выбранной подзоны. Целевая температура может быть интерпретирована как диапазон температур. Предварительно заданный период времени может также быть настроен или изменен в процессе работы во время функционирования.
Выбранная подзона имеет положение механического преобразователя, ассоциированное с ней, и механическая система позиционирования перемещает преобразователь ультразвука в это положение таким образом, чтобы зона фокусировки охватывала выбранные подзоны, с тем чтобы они могли быть нагреты. Выполнение инструкций также вызывает выполнение процессором поддержания в целевой зоне целевой температуры в течение предварительно заданного периода времени посредством многократного получения данных магнитно-резонансной термометрии.
Данные магнитно-резонансной термометрии описывают температуру вокселов в подзоне. Важно отметить, что данные описывают только температуру вокселов в подзоне. Могут иметься определенные свойства, такие как значение T1, значение T2 или упругость ткани в конкретном вокселе, которые могут быть показательными относительно температуры. Могут применяться алгоритмы управления, которые используют эти данные зависящего от температуры магнитного резонанса вместо непосредственного использования температурных данных. Однако данные магнитного резонанса могут также быть обработаны таким образом, чтобы температура была отображена в каждом из вокселов и это могло использоваться для управления процессом.
Выполнение инструкций также вызывает выполнение процессором поддержания в целевой зоне целевой температуры в течение предварительно заданного периода времени посредством многократного определения карты температурных свойств, описывающей температуру в каждом из вокселов с использованием, по меньшей мере, данных магнитно-резонансной термометрии. Карта температурных свойств может являться температурой, может являться некоторым средним значением или другой величиной, вычисленной статистически по значениям температуры, или она может являться свойством, которое является зависящим от температуры, таким как значение T1, фаза вращения, T2 или другие свойства. Выполнение инструкций также вызывает выполнение процессором поддержания в целевой зоне целевой температуры в течение предварительно заданного периода времени посредством многократного независимого нагревания областей до целевой температуры посредством управления каждым из электронно контролируемых фокусов с помощью алгоритма температурной обратной связи, который использует карту температурных свойств.
В одном из вариантов осуществления каждая из областей соответствует вокселу. В других вариантах осуществления каждая из областей соответствует части воксела или множеству вокселов.
Алгоритм управления является основанным на областях. Каждая из областей оценивается независимо и обрабатывается алгоритмом управления, который управляет электронным управлением фокуса с целью обеспечения соответствующего нагрева каждой области. Выполнение инструкций также вызывает выполнение процессором поддержания в целевой зоне целевой температуры в течение предварительно заданного периода времени посредством многократного изменения выбранной подзоны с использованием последовательности. Это может включать просто следование списку подзон, которые должны быть нагреты, или это может включать использование более сложного алгоритма, который изменяет последовательность в процессе работы или даже может выбрать следующую подзону в процессе работы.
Этот вариант осуществления может быть полезным, потому что он предоставляет средство для эффективного нагрева больших областей субъекта до конкретной температуры. Это может использоваться для ампутации ткани, но может быть особенно полезным для поддержания температуры целевой зоны ниже значения, при котором происходит некроз ткани.
В другом варианте осуществления выполнение инструкций также вызывает выполнение процессором определения температурного свойства для каждой из множества подзон с использованием данных магнитно-резонансной термометрии. Температурное свойство может, например, являться статистическим свойством карты температурного свойства для каждой из множества подзон. В качестве примера, минимальная температура, максимальная температура или средняя температура могут быть выбраны и использованы в качестве температурного свойства. В других случаях другие величины, такие как T1, T2 или другие параметры, которые показывают зависимость от температуры, также могут использоваться. Выполнение инструкций также вызывает выполнение процессором выбора следующей подзоны с использованием температурного свойства для каждой из множества подзон.
Например, алгоритм или алгоритм дерева решений может использоваться для выбора следующей подзоны. Например, если бы была выбрана средняя температура, то подзона с самой низкой средней температурой могла бы быть выбрана в некоторых вариантах осуществления. Выполнение инструкций также вызывает выполнение процессором изменения последовательности таким образом, чтобы следующая подзона была следующей в последовательности.
Этот вариант осуществления может быть полезным, поскольку он позволяет осуществлять навигацию в процессе работы к следующей подзоне, которая должна быть нагрета. Этапы в этом варианте осуществления могут быть выполнены многократно для поддержания температуры всей целевой зоны в течение предварительно заданного периода времени.
В другом варианте осуществления выполнение инструкций также вызывает выполнение процессором управления механической системой позиционирования с целью перемещения преобразователя ультразвука в положение преобразователя для каждой из множества подзон до начала нагрева целевой зоны до целевой температуры. Этот вариант осуществления может быть полезным, поскольку различные свойства магнитного поля могут изменяться, когда механическая система позиционирования перемещается в различные местоположения. Перемещение системы механического позиционирования в каждое из положений до начала процесса нагревания может позволить осуществить измерения свойств, которые оказывают влияние на измерения MR, и также могут позволить выполнить испытательные воздействия ультразвука или испытательные пуски до начала процесса нагревания.
В другом варианте осуществления выполнение инструкций также вызывает выполнение процессором получения калибровочных данных магнитно-резонансной термометрии в положении преобразователя для каждой из множества подзон до нагревания целевой зоны до целевой температуры. Карта температурного свойства определяется с использованием, по меньшей мере, калибровочных данных магнитного резонанса. Для выполнения точных измерений температуры может быть необходимым использование некоторых методик, таких как методика фазы вращения, чтобы выполнить начальное градуировочное измерение.
В другом варианте осуществления выполнение инструкций также вызывает выполнение процессором тестового ультразвукового воздействия с применением системы сфокусированного ультразвука высокой интенсивности при нахождении преобразователя по меньшей мере в двух или в каждой из множества подзон до нагревания целевой зоны до целевой температуры. Выполнение инструкций также вызывает выполнение процессором определения электронной коррекции фокуса для каждой из множества подзон и/или настройки положения зоны фокусировки для каждой из множества подзон и/или вычисления скорости повышения температуры для каждой из множества подзон. Этот вариант осуществления может быть полезным, поскольку он может предоставить различные средства коррекции применения медицинского инструмента до начала процесса нагревания.
В другом варианте осуществления выполнение инструкций также вызывает выполнение процессором многократного вычисления коэффициентов перфузии и/или коэффициентов рассеяния для каждого из вокселов с использованием данных магнитного резонанса. Дополнительные данные магнитного резонанса могут быть получены во время получения данных магнитно-резонансной термометрии, или также могут быть выведены из некоторых таких же последовательностей импульсов. Это данные могут использоваться для коррекции коэффициентов перфузии и/или рассеяния в каждом из вокселов.
В другом варианте осуществления алгоритм управления температурой с обратной связью имеет параметры алгоритма управления температурой. Параметр алгоритма управления температурой представляет собой постоянное значение, которое используется в математической формуле, которая используется алгоритмом управления температурой с обратной связью. Изменение параметров алгоритма управления температурой изменяет поведение алгоритма управления температурой с обратной связью. Выполнение инструкций также вызывает выполнение процессором многократного повторного вычисления параметров алгоритма управления температурой с использованием коэффициентов перфузии и/или коэффициентов рассеяния. Например, когда система сфокусированного ультразвука высокой интенсивности начинает нагревать целевую зону, может иметься некоторое множество предполагаемых параметров алгоритма управления температурой. В процессе выполнения системой нагрева целевой зоны коэффициенты перфузии и/или коэффициенты рассеяния могут быть вычислены во время процесса, и эти значения могут использоваться для повторного вычисления параметров алгоритма управления температурой, в результате чего улучшается функционирование алгоритма управления температурой с обратной связью.
В другом варианте осуществления алгоритм управления температурой с обратной связью представляет собой один из следующих алгоритмов: бинарный алгоритм управления температурой, пропорциональный алгоритм управления температурой, пропорционально-интегральный алгоритм управления температурой и пропорционально-интегрально-производный алгоритм управления температурой.
В другом варианте осуществления целевая зона разделяется на множество подзон с применением преобразования к средним осям.
В другом варианте осуществления медицинский инструмент содержит жидкостную систему охлаждения, которая обеспечивает циркуляцию жидкости для охлаждения субъекта. Жидкостная система охлаждения функционирует для поддержания рабочей температуры жидкости. Она, например, может представлять собой трубку или охлаждающую подставку, которая размещается на поверхности субъекта и используется для отведения избыточного тепла. Холодильник или другая система охлаждения могут поддерживать постоянную температуру жидкости. Выполнение инструкций также вызывает выполнение процессором многократного получения данных магнитного резонанса, описывающих фазы вращения жидкости, с целью определения изменений в фазе вращения. Например, если используется способ фазы вращения для измерения температуры, целесообразно многократное проведение фазовых измерений для градуировки измерение. Например, могут иметься изменения в магнитном поле, которые приводят к медленному перемещению фазы вращения во время применения медицинского инструмента.
Если температура жидкости в жидкостной системе охлаждения поддерживается постоянной, в результате чего достигается стационарное состояние, то жидкость в пределах жидкостной системы охлаждения может использоваться в качестве контроля. Фаза вращения может перемещаться вследствие изменений в магнитном поле, но температура будет той же самой, и она может использоваться в качестве контрольного измерения. Выполнение инструкций также вызывает выполнение процессором коррекции карты температурного свойства с использованием изменений в фазе вращения жидкости. В некоторых вариантах осуществления может присутствовать температурный датчик для измерения температуры жидкости, чтобы сделать коррекцию более точной. Это может учесть отклонения и в магнитном поле системы магнитно-резонансной томографии и также отклонения в температуре жидкости жидкостной системы охлаждения.
В другом варианте осуществления выполнение инструкций также вызывает выполнение процессором настройки размера и/или местоположения подзон и/или положения преобразователя после начала поддержания целевой зоны при целевой температуре. Этот вариант осуществления может быть полезным, поскольку подзоны, которые были созданы, возможно, не были оптимальны для конкретного нагревания целевой зоны. Настройка объема и местоположения подзон может обеспечить возможность более эффективного или точного нагревания целевой зоны.
В другом варианте осуществления выполнение инструкций также вызывает выполнение процессором нагревания целевой зоны при изменении выбранной подзоны. В этом варианте осуществления преобразователь ультразвука перемещается от одного местоположения к другому при изменении подзоны. Может быть эффективным применение преобразователя ультразвука для нагревания целевой зоны при перемещении преобразователя ультразвука от одного местоположения к другому местоположению.
В другом варианте осуществления алгоритм дерева решений применяется для запуска изменения выбранной подзоны. Это может быть эффективным и простым способом обеспечения определения того, когда подзона должна быть изменена, или даже выбора того, какая подзона будет нагреваться следующей.
В другом варианте осуществления целевая температура имеет одно из следующих значений: между 38°C и 40°C, между 39°C и 40°C, между 40°C и 45°C, между 40°C и 44°C, между 40°C и 43°C, между 40°C и 42°C, между 40°C и 41°C, между 41°C и 45°C, между 41°C и 44°C, между 41°C и 43°C, между 41°C и 42°C, между 42°C и 45°C, между 42°C и 44°C, между 42°C и 43°C, между 43°C и 45°C, между 43°C и 44°C, между 44°C и 45°C, между 38°C и 39°C, между 52°C и 55°C, больше либо равна 55°C и между 50°C и 55°C.
В другом аспекте изобретение предоставляет компьютерный программный продукт, содержащий исполнимые машиной инструкции для выполнения процессором, управляющим медицинским инструментом, который содержит систему магнитно-резонансной визуализации, с целью получения данных магнитно-резонансной термометрии от субъекта в зоне визуализации. Медицинский инструмент также содержит систему сфокусированного ультразвука высокой интенсивности, содержащую преобразователь ультразвука с электронно-управляемым фокусом. Система сфокусированного ультразвука высокой интенсивности дополнительно содержит механическую систему позиционирования для позиционирования преобразователя ультразвука. Электронно-управляемый фокус реализован с возможностью настройки фокуса в пределах зоны фокусировки. Местоположение зоны фокусировки зависит от положения преобразователя ультразвука. Выполнение инструкций вызывает получение процессором целевой зоны, описывающей объем в пределах субъекта. Целевая зона больше зоны фокусировки. Выполнение инструкций также вызывает выполнение процессором разделения целевой зоны на множество подзон. Подзоны делятся на области.
Каждая из множества подзон имеет положение преобразователя. Когда преобразователь находится в положении преобразователя, зона фокусировки содержит подзону. Выполнение инструкций также вызывает выполнение процессором определения последовательности для перемещения положения преобразователя в каждую из множества подзон.
Выполнение инструкций также вызывает выполнение процессором определения выбранной подзоны, выбираемой из множества подзон, с использованием последовательности. Выполнение инструкций также вызывает выполнение процессором поддержания в целевой зоне целевой температуры в течение предварительно заданного периода времени посредством многократного управления механической системой позиционирования с целью перемещения преобразователя в положение преобразователя выбранной подзоны. Выполнение инструкций также вызывает выполнение процессором поддержания в целевой зоне целевой температуры в течение предварительно заданного периода времени посредством многократного получения данных магнитно-резонансной термометрии с применением системы магнитно-резонансной визуализации. Данные магнитно-резонансной термометрии описывают температуру вокселов в подзоне.
Выполнение инструкций также вызывает выполнение процессором поддержания в целевой зоне целевой температуры в течение предварительно заданного периода времени посредством многократного определения карты температурных свойств, описывающую температуру в каждом из вокселов с использованием, по меньшей мере, данных магнитно-резонансной термометрии. Выполнение инструкций также вызывает выполнение процессором поддержания в целевой зоне целевой температуры в течение предварительно заданного периода времени посредством многократного независимого нагревания областей до целевой температуре посредством управления каждым из электронно контролируемых фокусов с помощью алгоритма температурной обратной связи, который использует карту температурных свойств. Выполнение инструкций также вызывает выполнение процессором поддержания в целевой зоне целевой температуры в течение предварительно заданного периода времени посредством многократного изменения выбранной подзоны с использованием последовательности.
Следует понимать, что один или больше вышеупомянутых вариантов осуществления изобретения могут быть скомбинированы, если комбинированные варианты осуществления не являются взаимно исключающими.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже будут описаны предпочтительные варианты осуществления, только в качестве примера, и со ссылками на чертежи, на которых:
На фиг. 1 показана блок-схема, которая иллюстрирует пример способа для управления медицинским инструментом;
На фиг. 2 показан пример медицинского инструмента;
На фиг. 3 показана блок-схема, которая иллюстрирует способ для согласованного нагревания большого объема для гипертермии;
Фиг. 4 иллюстрирует способ разделения целевой зоны на подзоны;
На фиг. 5 показана блок-схема, которая иллюстрирует пример дерева решений, используемого для решения, какая подзона или подобъем должны нагреваться;
На фиг. 6 показан пример временной шкалы, которая показывает перемещение и разрушение ультразвуком во время применения медицинского инструмента;
Фиг. 7 демонстрирует применение способа согласованного нагревания большой площади в естественных условиях; и
Фиг. 8 иллюстрирует интенсивность сигнала магнитного резонанса и флуоресценцию доксорубицина после инъекции визуализируемой чувствительной к низкой температуре липосомы (iLTSL) и нагрева с помощью магнитно-резонансного сфокусированного ультразвука высокой эффективности.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Аналогично пронумерованные элементы на этих фигурах являются или эквивалентными элементами, или выполняют одну и ту же функцию. Элементы, которые были обсуждены ранее, не обязательно будут обсуждаться на последующих фигурах, если функция будет эквивалентна.
На фиг. 1 показана блок-схема, которая иллюстрирует пример способа для управления медицинским инструментом. На этапе 100 осуществляется получение целевой зоны, которая описывает объем в пределах субъекта. Затем на этапе 102 целевая зона делится на множество подзон. Каждая из множества подзон имеет положение преобразователя, ассоциированное с ней. Целевая зона имеет больший размер, чем зона фокусировки. Когда преобразователь находится в положении преобразователя, конкретная зона фокусировки содержит соответствующую подзону. Затем на этапе 104 определяется последовательность перемещения положения преобразователя в каждую из множества подзон. Затем на этапе 106 выбранная подзона выбирается из множества подзон с использованием последовательность.
Следующий этап 108 заключается в управлении механической системой позиционирования с целью перемещения преобразователя в положение выбранной подзоны. Затем на этапе 110 получают данные магнитно-резонансной термометрии. Данные магнитно-резонансной термометрии описывают температуру вокселов в подзоне. Затем на этапе 112 определяется или вычисляется карта температурного свойства, которая описывает температуру в каждом из вокселов с использованием, по меньшей мере, данных магнитно-резонансной термометрии. Затем на этапе 114 каждая область независимо нагревается до целевой температуры посредством управления электронно-управляемым фокусом с помощью алгоритма с температурной обратной связью, который использует карту температурного свойства. Наконец, на этапе 116 выбранная подзона изменяется с использованием последовательности. Способ может вернуться к этапу 108, 110, 112, 114 или 116, и процесс может выполняться многократно, пока процедура нагрева не будет завершена. Например, способ между этапами 108 и 116 может выполняться в течение заранее заданного периода времени.
На фиг. 2 показан пример медицинского инструмента 200. Медицинский инструмент содержит систему 202 магнитно-резонансной визуализации и систему 204 сфокусированного ультразвука высокой интенсивности. Система магнитно-резонансной визуализации содержит магнит 206. Магнит, показанный на фиг. 2, является сверхпроводящим магнитом цилиндрического типа. Магнит имеет охлаждаемый жидким гелием криостат со сверхпроводящими катушками. Также возможно использовать постоянные или резистивные магниты. Также возможно использование магнитов различных типов, например также можно использовать и разделенный цилиндрический магнит, и так называемый открытый магнит. Разделенный цилиндрический магнит аналогичен стандартному цилиндрическому магниту, за исключением того, что криостат был разделен на две секции, чтобы обеспечить доступ к изоплоскости магнита; такие магниты могут, например, применяться совместно с терапией пучком заряженных частиц. Открытый магнит имеет две магнитные секции, один выше другой, с пространственным промежутком, который является достаточно большим, чтобы принять субъекта: расположение области с двумя секциями, аналогичное катушке Гельмгольца. Открытые магниты популярны, поскольку субъект меньше ограничивается. Внутри криостата цилиндрического магнита находится набор сверхпроводящих катушек. В пределах канала 208 цилиндрического магнита 206 находится зона визуализации, в которой магнитное поле является достаточно сильным и однородным для выполнения магнитно-резонансной визуализации.
В пределах канала 206 магнита также находится катушка - также катушка 210 градиента магнитного поля, которая используется для пространственного кодирования магнитных спинов в зоне визуализации магнита во время получения данных магнитного резонанса. Катушка 210 градиента магнитного поля соединена с источником питания 212 катушки градиента магнитного поля. Предполагается, что катушка градиента магнитного поля является типичной. Обычно катушки градиента магнитного поля содержат три отдельных множества катушек для пространственного кодирования в трех ортогональных пространственных направлениях. Источник питания градиента магнитного поля подводит ток к катушкам градиента магнитного поля. Ток, подводимый к катушкам магнитного поля, управляется как функция времени и может изменяться линейно или быть импульсным.
В центре канала 208 находится зона 218 визуализации. Смежно с зоной визуализации находится радиочастотная катушка 214, которая соединена с приемопередатчиком 216. Также в пределах канала 208 находится субъект 220, лежащий на опоре 222 субъекта. Радиочастотная катушка 214 настроена для управления ориентацией магнитных спинов в зоне визуализации и для получения радиопередачи от вращений также в пределах зоны визуализации. Радиочастотная катушка 214 может содержать множество элементов катушки. Радиочастотная катушка может также называться каналом или антенной. Радиочастотная катушка 214 и радиочастотный приемопередатчик 216 могут быть заменены на отдельные катушки передачи и приема и отдельный передатчик и приемник. Следует понимать, что радиочастотная катушка 214 и радиочастотный приемопередатчик 216 являются типичными. Радиочастотная катушка 214 также предназначена для представления выделенной передающей антенны и выделенной принимающей антенны. Аналогично, приемопередатчик может также представлять отдельный передатчик и приемники.
Система 204 сфокусированного ультразвука высокой интенсивности содержит заполненную жидкостью камеру 224, в которой находится преобразователь 226 ультразвука. Преобразователь 226 ультразвука механически размещается посредством механической системы позиционирования 228. Имеется привод 230 для приведения в действие механической системы позиционирования. В альтернативных вариантах осуществления преобразователь ультразвука может быть внешним преобразователем, помещаемым вручную, без заполненной жидкостью камеры 924 или механической системы позиционирования 228.
Преобразователь 226 ультразвука также может содержать множество элементов для испускания ультразвука. Источник питания, который не показан, может управлять амплитудой, и/или фазой, и/или частотой электроэнергии переменного тока, подаваемой к элементам преобразователя 226 ультразвука. Пунктирные линии 232 показывают траекторию ультразвука от преобразователя 226 ультразвука. Ультразвук 232 сначала проходит через заполненную жидкостью камеру 224. Ультразвук затем проходит через ультразвуковое окно 234. После прохождения через ультразвуковое окно 234 ультразвук проходит через дополнительную гелевую подушку 236 или через слой проводящего ультразвук геля, который может использоваться для проведения ультразвука между окном 234 и субъектом 220. Ультразвук 232 затем входит в субъекта 220 и фокусируется в фокусе 238 или точке разрушения ультразвуком. Область 240 является целевой зоной. Посредством объединения электронного и механического позиционирования фокуса 238 может быть нагрета вся целевая зона 240. Целевая зона 240 находится в пределах зоны визуализации 218. Система 204 сфокусированного ультразвука высокой интенсивности, приемопередатчик 216 и источник питания 212 катушки градиента магнитного поля соединены с аппаратным интерфейсом 246 вычислительной системы 242. Аппаратный интерфейс 246 соединен с процессором 244. Процессор 244 также соединен с пользовательским интерфейсом 248, компьютерным запоминающим устройством 250 и компьютерной памятью 252.
Показано, что компьютерное запоминающее устройство 250 содержит данные 260 определения зоны фокусировки. Определение 260 зоны фокусировки представляет собой данные, которые используются для определения размера зоны 238 фокусирования. Зона фокусировки может быть определена с точки зрения площади, выше которой интенсивность ультразвука превышает порог, или она может быть определена с точки зрения фиксированных координат, которые могут быть определены относительно положения преобразователя 226 ультразвука, или может зависеть от координат, установленных механической системой 228 позиционирования. Также показано, что компьютерное запоминающее устройство 250 содержит координаты 262 целевой зоны. Координаты 262 целевой зоны содержат данные, которые идентифицируют местоположение целевой зоны 240. Координаты 262 целевой зоны могут в некоторых вариантах осуществления являться определениями в абсолютных координатах, или, в других вариантах осуществления, могут быть определены с точки зрения их положения относительно анатомических опознавательных точек субъекта 220.
Также показано, что компьютерное запоминающее устройство 250 показывает координаты 264 подзоны. Координаты 264 подзоны содержат координаты, которые разделяют целевую зону на соответствующие подзоны. Также показано, что компьютерное запоминающее устройство 250 показывает координаты 266 положения преобразователя. Координаты 266 положения преобразователя имеются для каждой из подзон. Также показано, что компьютерное запоминающее устройство 268 содержит последовательность 268 импульсов. Последовательность импульсов представляет собой множество команд, которые процессор 244 может выдавать системе 202 магнитно-резонансной визуализации с целью получения данных магнитного резонанса. Последовательность 268 импульсов может содержать последовательность импульсов, которая разработана для получения данных магнитно-резонансной термометрии. Также показано, что компьютерное запоминающее устройство 250 содержит данные 270 магнитно-резонансной термометрии, которые были получены с использованием последовательности 268 импульсов. Также показано, что компьютерное запоминающее устройство 250 содержит последовательности 272. Последовательность 272 содержит последовательность подзон, которые должны быть нагреты. Она может быть заранее определенным списком или может содержать исходную подзону, и остальные зоны могут быть разработаны или изменены в процессе работы. Также показано, что компьютерное запоминающее устройство 250 содержит карту 274 температурного свойства, которая была восстановлена по данным 270 магнитно-резонансной термометрии.
Показано, что компьютерная память 252 содержит модуль 280 управления. Модуль 280 управления содержит исполнимый компьютером код, который позволяет процессору 244 управлять работой и функционированием медицинского инструмента 200. Также показано, что компьютерная память 252 содержит модуль 282 деления на подзоны. Модуль 282 деления на подзоны содержит исполнимый компьютером код, который позволяет процессору 244 разделить координаты 262 целевой зоны на множество координат 264 подзон, и также может одновременно вычислить координаты 266 положения преобразователя. Также показано, что компьютерная память 252 содержит модуль 284 восстановления изображения. Модуль 284 восстановления изображения содержит процессор 244 для конструирования карты 274 температурного свойства по данным 270 магнитно-резонансной термометрии. Модуль 284 восстановления изображения в некоторых вариантах осуществления может также быть способен восстановить другие данные магнитного резонанса или изображения по данным 270 магнитного резонанса.
Также показано, что компьютерная память 252 содержит алгоритм 286 управления температурой, который позволяет процессору 244 управлять системой 204 сфокусированного ультразвука высокой интенсивности с целью поддержания температуры в пределах выбранной подзоны посредством анализа карты 274 температурного свойства на основании данных для каждого воксела. Также показано, что компьютерная память 252 содержит алгоритм 288 выбора подзоны. Алгоритм выбора 288 подзоны позволяет процессору 244 использовать данные 270 магнитно-резонансной термометрии и/или карту 274 температурного свойства для выбора следующей подзоны, которая должна быть нагрета.
На фиг. 3 показана блок-схема, которая иллюстрирует способ для согласованного нагревания большого объема для гипертермии. Блок-схема на фиг. 3 разделена на четыре основных части: 300 представляет визуализацию, 302 представляет магнитно-резонансную термометрию с использованием данных визуализации, 304 представляет собой модуль планирования лечения и 306 представляет собой цикл обратной связи разрушения ультразвуком 306. Визуализация 300 предоставляет данные для модуля 304 планирования лечения и термометрии MR 302. Часть 304 плана лечения содержит несколько подэтапов. Одним из них является алгоритм 308 разделения на зоны лечения. Алгоритм 308 разделения на зоны лечения способен выбрать зону лечения и также разделить ее на подзоны. Эта информация затем вводится в блок 310, который представляет мультибазисную коррекцию. Блок 304 также содержит коррекцию пространственного смещения преобразователя. Она выдает данные к мультибазисной коррекции 310 и также циклу 306 обратной связи разрушения ультразвуком. Мультибазисная коррекция 310 также выдает данные, полезные для магнитно-резонансной термометрии 302. Цикл 306 обратной связи разрушения ультразвуком получает данные магнитно-резонансной термометрии, которые используются для вычисления регулирования 314 температуры с обратной связью. Это выполняется посредством вычисление мощности на воксел, в результате чего вычисляется, сколько тепла будет подано в каждую подзону. Эти данные затем используются деревом решений 316, которое использует информацию от регулирования 316 температуры с обратной связью и магнитно-резонансной термометрии 302. Дерево 316 решений позволяет решить, продолжать ли нагревать текущую подзону или передвинуться в следующее местоположение. Блок 318 показывает перемещение в следующее местоположение. Местоположение 318 может быть скорректировано посредством коррекции 312 пространственного смещения преобразователя. После перемещения в следующее местоположение 318 повторяется часть 314 регулирования температуры с обратной связью 314. Этапы в блоке 306 повторяются, пока нагревание не будет полностью завершено.
Умеренная (40-45°C) гипертермия продемонстрировала способность улучшения эффективности противораковой терапии, таких как химиотерапия и радиация, в преклинических и клинических исследованиях. Температуры ниже умеренной гипертермии могут не давать требуемого эффекта, в то время как температуры выше данного диапазона могут остановить перфузию ткани, что оказывает негативное влияние на доставку лекарственных средств или радиотерапию. Параметры, которые являются критическими по отношению к достижению соответствующего лечения с помощью умеренной гипертермии, включают тепловую дозу, целевую температуру, пространственную точность, температурную стабильность и продолжительность. В целях управления этими параметрами применялось множество средств выполнения гипертермии, как для гипертермии глубоких тканей, так и для местной гипертермии, включая контактное нагревание, микроволновое излучение, радиочастотное излучение и ультразвук.
Узкий диапазон, 40-45°C, температур умеренной гипертермии требует жесткого контроля температуры с механизмом обратной связи. Направляемый MR сфокусированный ультразвук высокой интенсивности (MR-HIFU) имеет возможность обеспечения такой обратной связи неинвазивно с использованием термометрии сдвига частоты протонного резонанса (PRFS). MR-HIFU обеспечивает возможность нагрева ткани с применением электронного или механического управления. Электронное управление включает отклонение фокуса посредством изменения фазы акустических волн, сгенерированных каждым из элементов преобразователя, в то время как механическое регулирование достигается посредством сдвига и/или вращения преобразователя. Каждый из способов управления имеет значительные ограничения: электронное управление ограничено малыми отклонениями (~8 мм) [1], и механическое управление создает помехи температурной визуализации с применением способа PRFS, при этом большие смещения дают больше шума, и также является значительно более медленным [2]. Эти недостатки имеющихся подходов к нагреванию до сих пор ограничивали применение MR-HIFU в умеренной гипертермии, несмотря на начальные положительные результаты в клинических исследованиях [3].
Одним из самых больших недостатков, которые возникают вследствие вышеупомянутых ограничений, является малый размер целевого объема (1-2 см3), для нагрева которого до умеренной гипертермии применялся MR-HIFU [2]. Абляция больших объемов ткани достигалась посредством быстрого последовательного полного абляции малых объемов [1]. Однако такое фрагментарное нагревание не подходит для умеренной гипертермической обработки больших объемов, поскольку требуется нагревать весь объем непрерывно в течение длительного периода времени (30-60 минут) для применения при облучении или доставке лекарственных средств. Для большинства алгоритмов гипертермии требуется предварительно заданная форма обработки, например, круглая, которая, таким образом, не является конформной к опухоли [1, 2, 4]. Это ограничение на форму объема лечения не очень хорошо подходит для клинического применения, где является желательным избегание нагрева здоровой ткани и критических/чувствительных структур, таких как кровеносные сосуды. Наконец, ткань опухоли является разнородной (по перфузии и поглощению энергии), что означает, что мощность, требуемая для нагрева различных областей, зависит от локальных свойств ткани. Эта разнородная природа ткани опухоли предполагает необходимость основанной на вокселе/области обратной связи. Таким образом, три проблемы должны быть решены для клинического переноса умеренной гипертермии с помощью MR-HIFU: 1) нагревание больших объемов, 2) конформное нагревание, 3) нагревание разнородной ткани.
В целях решения данных проблемы, комплексный подход к умеренной гипертермии в настоящем раскрытии включает алгоритм, который комбинирует электронное и механическое управления для нагревания больших объемов. Данная комбинация была сделана возможной посредством метода разобщения, который применялся для разбиения обрабатываемого объема на подобъемы, и архитектуры алгоритма дерева решений, которая позволила осуществлять настройку обработки в реальном времени с целью обеспечения нагревания всех подобъемов. Размер этих подобъемов определялся максимальным объемом, достижимым с помощью только электронного регулирования. Обратная связь, основанная на вокселе/области, была применена с целью достижения однородного нагревания или требуемого обрабатываемого объема, и мультибазисная термометрия применялась для учета движения преобразователя и предоставления температурной обратной связи во время лечения. Предложенный алгоритм был реализован на клинической платформе Philips Healthcare Sonalleve MR-HIFU.
Для термической абляции требуется, чтобы температура была поднята до уровня, способного индуцировать некроз (обычно >55°C) в течение короткого периода времени (секунды), тогда как для умеренной гипертермии требуется, чтобы температура в целевой области поддерживалась на требуемом уровне в течение длительного периода времени. Поскольку оптимальная температура для большинства применений умеренной гипертермии находится в диапазоне 40-45°C (T<40°C дает ограниченный эффект, T>45°C может остановить перфузию ткани), то для умеренной гипертермии требуется подход, совершенно отличный от абляции. Это может обеспечить гибкую архитектуру алгоритма, которая дает возможность настройки в реальном времени во время лечения, при этом как форма подобъема, так и мощность, с которой нагревается каждый воксел, могут быть автоматически настроены в реальном времени. Варианты осуществления могут обеспечивать приведение к практическому применению, концепции и формализации алгоритма с целью демонстрации комбинации электронного и механического управления с возможностью обновления в реальном времени (ранее не раскрытой) и поддержку любого алгоритма обратной связи, включая, но не ограничиваясь, бинарный, пропорционально-интегральный и пропорционально-интегрально-производный. Данный подход предлагает конкретный способ минимизации механического перемещения преобразователя, таким образом повышая стабильность нагревания в случаях, когда нагревание во время перемещения преобразователя невозможно.
По сравнению с известной бинарной обратной связью абляции и алгоритмами обратной связи умеренной гипертермии и другими опубликованными и/или запатентованными работами, варианты осуществления могут предлагать значительные улучшения и дополнительные функции для разбиения большого объема, способов управления с обратной связью и поддержания умеренной гипертермии в объемах, больших, чем объемы, которые могут быть достигнуты с применением только электронного регулирования. Варианты осуществления могут обеспечить конформное, по большому объему и однородное распределение температуры глубоко в ткани, что требуется для большинства клинических приложений. Это однородное распределение температуры достигается посредством основанной на вокселе/области обратной связи, разбиения объема, электронного и механического управления, дерева решений и мультибазисной термометрией MR.
Существенные особенности настоящего изобретения могут включать разбиение объема, дерево решений, электронное и механическое управление, основанную на вокселе/области обратную связь и мультибазисную термометрию MR. Эти особенности подробно обсуждаются ниже.
Конформный алгоритм гипертермии большого объема
Конформный алгоритм гипертермии большого объема использует ряд этапов для планирования лечения, получения информации, необходимой для начала лечения (то есть, начальной температуры, различных поправочных коэффициентов) и выполнения нагревания. Эти этапы показаны на фиг. 3 и подробнее объясняются ниже.
На фиг. 3 показана блок-схема конформного алгоритма гипертермии большого объема. Во время планирования объем лечения был выбран и разделен на подобъемы с применением алгоритма разбиения объема лечения. В каждом из местоположений преобразователя, предоставленных алгоритмом, был выполнен мультибазисный сбор и сбор пространственного смещения преобразователя. Мультибазисный сбор был затем повторен с использованием собранных пространственных смещений. Во время разрушения ультразвуком применялось как мультибазисное исправление, так и коррекция пространственного смещения преобразователя. Для каждого динамического изображения MR (1,6 с), применялось дерево решений для определения необходимости нагревания текущего подобъема и, если решение о перемещении было принято, для определения следующего местоположения/подобъема для нагревания. Контроль пропорциональной обратной связи применялся для вычисления карты мощности, с которой текущий подобъем был нагрет, с применением электронного регулирования. Этот контур обратной связи повторялся до истечения заданного пользователем времени разрушения ультразвуком.
Подход к разбиению целевого объема
Заданный пользователем нарисованный от руки целевой объем автоматически делится на подобъемы с применением алгоритма типа "разделяй и властвуй" (см. фиг. 4). Каждый из подобъемов был бы нагрет с применением электронного регулирования фокусной точкой HIFU, тогда как механическое перемещение преобразователя HIFU может применяться для помещения преобразователя в соответствующее местоположение для нагрева каждого подобъема. Размер индивидуальных подобъемов ограничивается объемом, который может быть адекватно покрыт с помощью только электронного регулирования (определяемого пользователем). Размер подобъема может изменяться, но обычно он ограничивается возможностями электронного регулирования преобразователя обеспечить оптимальное фокусирование, соответствующую акустическую интенсивность и определение границы нагретой области (конформное нагревание). Этот подход применим и к 2-D, и к 3-D разбиению объема.
Фиг. 4 иллюстрирует способ разделения целевой зоны на подобъемы. Имеется целевая зона 240. Имеется три вида 400, 402, 404, которые показывают целевую зону 240. Фиг. 4 поясняет метод средних осей. Вычисляется средняя ось, или каркас. Он показан линией 406. Затем определяется местоположение центра масс 408 целевой зоны 240. Большая точка 408 представляет приблизительное местоположение центра масс. Затем вдоль средней оси 406 определяется воксел 410, расположенный дальше всего от центра масс. Затем вдоль средней оси 406 выбирается фокус 412. Фокус 412 представляет собой естественную нескорректированную фокусную точку преобразователя ультразвука и помещается таким образом, чтобы максимальный объем целевой зоны 240 находился в пределах границ фокусирования 414 и также воксела 410. Таким образом задается первая подобласть 416. Вид 402 демонстрирует местоположение области 416 относительно целевой зоны 240. Для целевой зоны 240, не включающей область 416, затем повторяется процесс, проиллюстрированный на виде 400. Он проводится неоднократно, пока вся целевая зона 240 не будет разделена на подзоны. Вид 404 показывает целевую зону 240, разделенную на десять подобъемов. Они помечены как 416, 418, 420, 422, 424, 426, 428, 430, 432 и 434.
Фиг. 4 иллюстрирует алгоритм сегментации объема. После расчета каркаса 406 определяется самый дальний от центра масс (CoM) 408 воксел 410 и каркас расширяется до самого дальнего воксела 410. После нахождения оптимального местоположения 412 фокуса вдоль расширенного каркаса помечается объем, который может быть достигнут из фокуса. Эти шаги повторяются, пока весь объем не будет разделен на подобъемы, каждый из которых будет уникально помечен.
Алгоритм разбиения объема лечения, описанные ниже, дает 1) объем лечения, разделенный на подобъемы, и 2) список естественных нескорректированных местоположений фокуса HIFU в этих подобъемах, из которых все вокселы в пределах данного подобъема могут быть достигнуты с применением электронного регулирования (называемые в настоящем описании местоположениями преобразователя). Следует отметить, что каждое естественное местоположение фокуса HIFU соответствует физическому местоположению преобразователя.
Алгоритм разбивает объем лечения с применением преобразования к средней оси (скелетирование), которое содержит информацию о форме объема лечения. Скелетирование применяется для нахождения местоположения преобразователя, максимизируя размер ассоциированного с ним подобъема. Этот процесс минимизирует общее количество местоположений преобразователя, снижая суммарное время пробега преобразователя HIFU во время лечения. Уменьшение механического перемещения преобразователя обладает преимуществами ограничения возможных помех в отношении термометрии MR, повышения стабильности нагревания в случаях, когда нагревание невозможно во время перемещения (как в несвязанных областях), ограничения затрат по обслуживанию оборудования и, что возможно является наиболее важным, увеличения комфорта пациента и повышения пропускной способности клиники. Наконец, алгоритм связывает каждое местоположение преобразователя с вокселами, которые могут быть нагреты из этого местоположения, с применением только электронного регулирования.
Пример схемы работа алгоритма разбиения объема лечения:
1. Вычислить преобразование Евклидова расстояния (DT) от от центроида объема лечения.
2. Выполнить скелетирование объема лечения.
3. Выбрать воксел с самым большим значением DT в пределах объема лечения (начальный воксел).
4. Расширить каркас линейно до начального воксела.
5. Поместить центр объема электронного регулирования в начальном вокселе и вычислить перекрытие с объемом лечения (рассматриваются только вокселы, еще не отнесенные к какому-либо подобъему).
6. Повторить предыдущее вычисление посредством помещения центра объема электронного регулирования в каждый из вокселов вдоль расширенного каркаса, который находится на расстоянии от начального воксела ≤ радиусу электронного отклонения.
7. Определение воксела, в котором объем лечения и объема электронного регулирования имеют наибольшее перекрытие. Если выбрано множество вокселов, то выбирают воксел, расположенный дальше всего от границы объема лечения.
8. Добавить выбранный воксел к множеству местоположений преобразователя.
9. Пометить все вокселы, которые могут быть достигнуты с помощью электронного регулирования из рассматриваемого местоположения преобразователя. Если требуется, чтобы вокселы, которые уже были помечены, должны быть снова помечена на этом шаге, то выбрать метку местоположения преобразователя, расположенного ближе всего к этим вокселам. Вокселы вне объема лечения остаются непомеченными.
10. Повторить шаги 2-9, пока все вокселы в объеме лечения не будут помечены.
Мультибазисная термометрия MR и коррекция пространственного смещения фокусной точки:
Выбор и разбиение объема лечения: стек 2-D или 3-D мультисрезовых изображений MR может использоваться для выбора объема лечения (фиг. 5, 'планирование лечения', планирование лечения 308). Этот объем разбивается на подобъемы с применением алгоритма разбиения объема лечения, описанного выше (фиг. 4).
Мультибазисная термометрия со множеством местоположений преобразователя: Во время мультибазисного накопления фазовые изображения MR были получены в каждом местоположении преобразователя (фиг. 3, 'планирование лечения', планирование лечения 310). Они были подставлены как базисные изображения в расчет температуры в соответствующих местоположениях преобразователя в реальном времени. Эта процедура позволяет обеспечить стабильное картирование температур без влияния положения преобразователя на фазовые/температурные изображения. Во время этого шага может использоваться геометрическая зависимость между преобразователем и местоположениями фокусной точки. Следующий шаг ('коррекция пространственного смещения') измерит и применит поправочные коэффициенты, которые обеспечивают точное позиционирование, связанное с необходимостью повторения сбора базисных температур до начала лечения. Следует отметить, что мультибазис применялся/публиковался ранее для коррекции перемещения пациента или целевого объема. Подход, описанный в настоящем описании, должен учитывать перемещение преобразователя (мы не знаем, является ли это понятие предшествующим уровнем техники). Альтернативные средства коррекции влияния положения преобразователя на фазовые/температурные изображения, такие как моделирование фазового эффекта преобразователя, должны быть включены в объем изобретения.
Коррекция пространственного смещения: дополнительная коррекция пространственного смещения может быть выполнена для одного или более положений преобразователя с целью исправления фактического местоположения нагревания. После запуска MR-термометрии тестовые разрушения ультразвуком низкой мощности могут быть выполнены в каждом из положений преобразователя, вычисленных во время разбиения объема (фиг. 3, этап 312 планирования лечения). Положения, нагретые разрушающим ультразвуком низкой мощности, могут быть определены, помимо других способов, по термометрии MR посредством обнаружения местоположений с наибольшей достигнутой температурой или с самым большим изменением в температуре относительно базиса. Автоматический алгоритм применяется для выполнения поиска местоположений фокусной точки вблизи объема лечения, который не содержит, области, в которых термометрия MR неточна (кишечник, движущиеся органы). Алгоритм может исследовать множество срезов в своем поиске фокусных точек. Затем определяются пространственные смещения фокусной точки для каждого из местоположений преобразователя (каждое соответствует подобъему) посредством сопоставления геометрически рассчитанных естественных местоположений фокусной точки с обнаруженными местоположениями. Этот множество 3-D пространственных смещений может затем применяться для коррекции движения преобразователя. После получения пространственных смещений может быть повторено мультибазисное накопление, чтобы собрать базисные значения температуры в скорректированных местоположениях преобразователя с использованием полученных пространственных смещений (фиг. 3, этап 310 планирования лечения).
На фиг. 5 показана блок-схема, которая иллюстрирует пример дерева решений, используемого принятия решения о том, какая подзона или какой подобъем должны быть нагреты. Имеется блок, который представляет получение данных 500 магнитно-резонансной термометрии, которые затем вводятся в дерево, которое оценивает конкретное температурное условие 502 с применением анализа условий. Блок 504 представляет результат анализа, и 506 показывает, какой подобъем или подзона нагревается. После того как данные магнитно-резонансной термометрии были получены, дерево решений находится в блоке 502. Например, средняя температура могла сравниваться с целевой температурой плюс погрешность. Если температура выше данного среднего значения, то может быть принято решение о перемещении преобразователя в новое местоположение, например, с целью нагрева самого холодного подобъема. Если среднее значение не выше целевого значения плюс погрешность, то тогда среднее значение может сравниваться с целевым. Если среднее значение меньше целевого, то тогда может быть принято решение об отсутствии перемещения и нагревании текущего подобъема. Если среднее значение меньше целевого, то, например, может быть принято решение об определении подобъема с самой низкой средней температурой. Если это текущий подобъем, то тогда преобразователь может остаться в том же самом местоположении. Если температура с самой низкой средней температурой находится в другом местоположении, то может быть принято решение о перемещении и нагревании самого холодного подобъема.
Фиг. 5. Дерево решений, используемое во время разрушения ультразвуком. Этот алгоритм заканчивается нагреванием текущего подобъема, если его средняя температура (Tmean) ниже целевой температуры (Ttarget), и если текущий подобъем имеет самую низкую Tmean. В других случаях этот алгоритм направляет преобразователь для перемещения в подобъем с самой низкой Tmean.
Дерево решений
Алгоритм конформного нагревания большого объема использует дерево решений для определения того, продолжать ли нагрев или осуществлять механическое перемещение в другой подобъем (фиг. 3, разрушение ультразвуком - цикл обратной связи, шаг 316 и фиг. 5).
На фиг. 6 показан пример временной шкалы, которая показывает перемещение и разрушение ультразвуком во время применения медицинского инструмента. Штриховая линия 600 показывают решение, и это может быть решением о нагревании или перемещении преобразователя. Затем 602 указывает, когда происходит магнитно-резонансная визуализация с целью получения данных магнитно-резонансной термометрии. В блоке 604 показано, когда происходит задержка. Задержка происходит, когда принимается решение и также когда преобразователь перемещается в новое местоположение. 606 показывает, когда выполняется нагревание. В некоторых вариантах осуществления нагревание может все еще выполняться, когда происходит перемещение. 608 показывает, когда элемент преобразователя перемещается. И 610 показывает время в произвольных единицах измерения.
Если было обнаружено, что текущий подобъем нагрет достаточно, то дерево решений определяет следующий подобъем, который должен быть нагрет, используя ряд критериев, которые могут включать среднее число, минимум, максимум или другие критерии. Дерево решений используется с каждым динамическим изображением, чтобы обеспечить использование наиболее актуальных температурных карт для принятия решения. Один из примеров эффективного использования дерева решений (фиг. 5) заканчивался нагреванием текущего подобъема, если 1) не произошло превышение, превышающее погрешность температуры (Тerror) (Тerror может быть измерена непосредственно по изображениям термометрии MR); и 2) средняя температура (Tmean) подобъема была ниже, чем целевая температура. Если одно из этих условий было ложью, то дерево решений направляет преобразователь для перемещения в подобъем с самой низкой Tmean. Если подобъем с самой низкой средней температурой был текущим подобъемом, то было принято решение об остановке на продолжительность одного цикла обратной связи, без нагревания. Если было принято решение о нагревании другого подобъема, то преобразователь HIFU перемещался в соответствующее местоположение преобразователя. В случае либо повторного нагревания текущего подобъема, либо перемещения и нагревания следующего соответствующего подобъема, повторялся цикл нагревания подобъема. Если решение было принято остаться в текущем местоположении преобразователя без повторного нагревания, то объему лечения позволяли охладиться в течение одной длительности цикла обратной связи, после чего оценивалась температура. Алгоритм, изображенный на фиг. 5, может повторяться, пока не истечет определяемое пользователем время разрушения ультразвуком. Схема синхронизации различных частей системы, работающих вместе, изображена на фиг. 6.
Фиг. 6. Временная шкала перемещения и разрушения ультразвуком. Схема представляет пример временной шкалы перемещения и разрушения ультразвуком, показывающей точки, в которых использовалось дерево решений (a), время отображения (b), задержку между командами, выдаваемыми алгоритмом (c), нагрев с применением электронного регулирования HIFU (d), механическое перемещение преобразователя (e) и время (f).
Обратная связь на основании воксела/области
Использование архитектуры алгоритма дерева решений обеспечивает гибкость в выборе алгоритмов температурной обратной связи, так как оно ограничивает превышение температуры. Поэтому при условии, что максимальная мощность ограничена во избежание повреждения тканей (через механические эффекты, такие как кавитация), выбор алгоритмов обратной связи включает, но не ограничивается, бинарный, пропорционально-интегральный или пропорциональный-интегральный-производный. Любой из этих алгоритмов может применяться для предписывания мощности на воксел или для произвольно определенной области (например, 3×3×3 мм) в пределах целевого объема на основании обратной связи термометрии MR от вокселов или областей. Вместо мощности алгоритм обратной связи может также скорректировать продолжительность разрушения ультразвуком, рабочий цикл, или любой другой параметр, который оказывает влияние на суммарную выходную энергию в зависимости от времени. Чтобы ограничить влияние артефактов термометрии MR, которые являются следствием движения преобразователя, управление температурой с обратной связью может основывать свой расчет мощности на самом последнем точном полученном изображении термометрии MR, после того, как движение преобразователя прекратилось. Способ обратной связи, основанный на вокселах/областях, для управления нагреванием в подобласти является одним из способов для обеспечения нагревания подобластей до целевой температуры. Однако вышеупомянутое нагревание во множестве положений и связанные способы могут комбинироваться с другими алгоритмами нагревания, и объем изобретения также включает альтернативные способы нагревания.
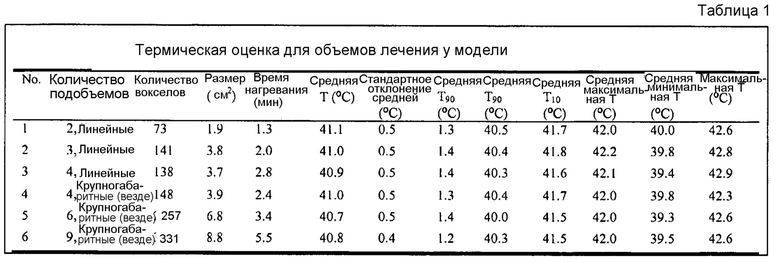
Для каждого объема лечения представлено количество подобъемов и вокселов, а также размер. Кроме того, показано время нагревания, определяемое как время, в которое каждый из подобъемов достиг средней температуры, большей либо равной Ttarget-Тerror. Кроме того, отображены другие теплофизические свойства, такие как средняя температура (Среднее значение T), среднее стандартное отклонение (средней SD), амплитуды T90-T10, средняя T90, средняя T10, средние максимальные и минимальные температуры (Av max и min T, соответственно) и суммарные максимальные температуры после нагревания (Max T), выделяются. Средние или медианные значения были вычислены посредством усреднения после нагрева до окончания разрушения ультразвуком.
Комбинация электронного и механического управления
Применение электронного регулирования фокусной точки HIFU в пределах каждого подобъема обеспечивает точное нагревание областей, изображенных индивидуальными вокселами, или малыми областями, в зависимости от разрешения изображения MR. Как упомянуто выше в разделе "Обратная связь на основании воксела/области", алгоритм обратной связи может применяться для вычисления акустической мощности, с которой должен быть нагрет каждый воксел/область. Нагревание было достигнуто посредством электронного регулирования фокусом преобразователя HIFU в текущем подобъеме. В зависимости от времени динамического сканирования и числа вокселов, которые должны были быть нагреты, могли происходить множественные разрушения ультразвуком одного и того же воксела. В этом случае мощность для таких вокселов может быть поделена на число разрушений ультразвуком в них. Нагревание подобъема затем выполнялось в течение интервала, равного числу нагретых вокселов, умноженному на количество прохождений через каждый воксел, умноженному на время нагревания воксела. Электронное отклонение вдоль и перпендикулярно к оси пучка может снизить реализованную интенсивность в намеченном фокусе HIFU и изменить местоположение максимальной интенсивности. Поэтому для каждого воксела мощность может быть скорректирована с использованием множителя полинома второй степени в зависимости от электронного отклонения от естественного фокусного положения.
Это данные демонстрируют, что система обеспечивает быстрое нагревание до нужной температуры и конформное, хорошо управляемое нагревание. В то время как время нагревания действительно увеличивается с увеличением объема (1,3-5,5 минут), это увеличение мало по сравнению с типичным временем лечения умеренной гипертермией, составляющим 1 час. Фиг. 7 демонстрирует рабочие характеристики этого алгоритма в естественных условиях, с рабочими характеристиками, аналогичными работе на модели.
Это данные демонстрируют, что система обеспечивает быстрое нагревание до нужной температуры и конформное, хорошо управляемое нагревание. В то время как время нагревания действительно увеличивается с увеличением объема (1,3-5,5 минут), это увеличение мало по сравнению с типичным временем лечения умеренной гипертермией, составляющим 1 час. Фиг. 7 демонстрирует рабочие характеристики этого алгоритма в естественных условиях, с рабочими характеристиками, аналогичными работе на модели.
На фиг. 7 показаны два изображения 700, 702 и диаграмма 704. Изображение 700 представляет собой схему планирования. Изображение 702 показывает тепловое магнитно-резонансное изображение или температурную карту, полученную непосредственно после того, как обе подзоны были нагреты до средней температуры, превышавшей 40°C. Это показывает конформное нагревание по всей зоне. На фиг. 700 показана обработка различных местоположений зон и их автоматическое разбиение на подзоны, каждая из которых может обрабатываться с помощью одного электронного фокусирования. На плоском изображении 700 можно видеть две подзоны. Имеется первая подзона 706 и вторая подзона 708. Эти две подзоны также видимы или помечены на тепловом изображении 702. На диаграмме 704 показано время в минутах в зависимости от температуры в градусах Цельсия. Кривая, помеченная как 706, соответствует средней температуре в пределах первой подзоны 706. Кривая, помеченная как 708, показывает температуру во второй подзоне 708. Пунктирная линия 710 показывает температуру 41°C, которая является целевой температурой в этом эксперименте. Пунктирная линия 712 в одной минуте показывает время запуска нагревания. Пунктирная линия 714, которая соответствует 11 минутам, показывает время, когда нагревание было остановлено. При изучении диаграммы 704 можно заметить, что способ может эффективно поддерживать температуру целевой зоны.
Фиг. 7 иллюстрирует эксперимент, тестирующий умеренную гипертермию для алгоритма нагревания большого объема: приведен пример в естественных условиях. Объем лечения был выбран в опухоли Vx2 в бедре кролика. A) Местоположение объема лечения и его автоматическое разделение на подобъемы, каждый из которых может лечиться с помощью одного электронного регулирования. B) карта температуры непосредственно после того, как оба объема были нагреты до Taverage>40°C, показывающая конформное нагревание всего объема лечения. C) изменение нагревания в обоих подобъемах в течение 10-минутного лечения умеренной гипертермией.
Варианты осуществления могут включать одно или более данных усовершенствований или улучшений:
1) 3-D визуализация термометрии MR - использование 3-D термометрии MR вместе с подходом нагревания большого объема, описанным в настоящем описании, могло бы обеспечить улучшенный контроль возможных горячих и/или холодных точек в реальном времени, а так же предоставить более полную информацию о распределении температуры ткани. Такая информация могла бы повысить уровень безопасности этого способа, а также обеспечить более высокое качество данных для изучения доставки лекарственных средств и воздействия излучения. Наконец, использование 3-D термометрии MR позволило бы обеспечить изотропные или почти изотропные размеры воксела (3-D визуализация учитывает более тонкие срезы в термометрии MR), что могло бы улучшить точность лечения. Получение смещений фокусной точки, описанных выше, было выполнено с применением 3-D с целью увеличения пространственной точности коррекции, и улучшение SNR с помощью использования различных катушек визуализации MR может обеспечить возможность использования 3-D визуализации с достаточно быстрым динамическим отображением для контроля температуры во время лечения.
2) Расширение до 3-D планирования, выполнения и контроля лечения - Все типовые методики, алгоритмы и варианты осуществления легко применимы и к 2-D, и к 3-D плану лечения. Подразбиение целевого объема на подобъемы может быть выполнено в 3-D с использованием аналогичных процедур. Кроме того, платформа MR-HIFU обеспечивает многомерное механическое перемещение преобразователя, а также многомерное электронное управление, таким образом, позволяя учитывать 3-D геометрию целевых и здоровых тканей в течение всего лечения. Объединение 3-D планирования лечения с 3-D визуализацией (см. "усовершенствования или улучшения"/"3-D визуализация термометрии MR") могло бы обеспечить направление лечения на его цель с наибольшей специфичностью.
3) Переменное время ультразвуком и перемещения преобразователя - Каждое разрушение ультразвуком может быть или не быть ограничено продолжительностью одного динамического получения изображений. В случае когда используются короткие динамические времена получения изображений, или в случаях, когда требуется быстрый нагрев/большая мощность, команды разрушения ультразвуком и/или перемещения могут быть выданы или обновлены после каждого получения изображений. Однако если время визуализации увеличивается, что может быть необходимым для повышения отношения "сигнал-шум" или получения больших объемов данных, то как нагревание, так и перемещение к другому местоположению могут быть выполнены в пределах одного динамического получения.
4) Способность использовать мощность и получаемое в результате тепло для измерения теплоотдачи или перфузии - термометрия MR в реальном времени и применение энергии ультразвука может обеспечить определение относительной перфузии в нагретой ткани на основании изменения температуры во время нагревания каждого из подобъемов, в то время как некоторые подобъемы охлаждаются, так же как на основании охлаждения после завершения гипертермии. Наконец, поскольку алгоритм нагревает ткань только при необходимости и выбирает мощность только на основании температуры в каждом вокселе (расчет мощности меняется в зависимости от способа обратной связи), накопленная, а также мгновенная, мощность, требуемая для поддержания целевой температуры ткани (а также для нагрева до этой температуре), может использоваться для оценки перфузии ткани. Структура перфузии в опухоли может обеспечить понимание того, какие части опухоли могут лучше всего лечиться с помощью комбинации умеренной гипертермии и химиотерапии или излучения, а также может помочь в планировании будущего лечения.
5) Более динамичная автоматическая коррекция исправления отклонения фокусной точки - Текущая реализация обеспечивает как автоматический, так и ручной сбор коррекции отклонения фокусной точки в каждом положении преобразователя. Перемещение ткани, так же как локальная магнитная неоднородность или ограниченные районы низкого SNR, могут привести к ошибочному обнаружению высокой температуры во время процедуры коррекции смещения, изложенного в настоящей заявке. Такие погрешности могут привести к пространственным неточностям нагревания, которые до сих пор уменьшались с помощью добавления ручной настройки. Более динамичный алгоритм автоматического обнаружения, который способен лучше отфильтровывать возможные погрешности в оценке этих поправочных коэффициентов, мог бы уменьшить время планирования лечения, а также обеспечить большую пространственную точность нагревания.
6) Обновления подобъема в реальном времени - Текущая реализация алгоритма большого объема подразделяет целевой объем на подобъемы непосредственно перед началом лечения гипертермией. Однако этот процесс не требует больших вычислительных затрат (<0,2 с на типичной рабочей станции), и поэтому он может быть выполнен в режиме реального времени во время перемещения преобразователя или нагревания. Такая корректировка в реальном времени может применяться для уменьшения числа механических перемещений преобразователя, сокращая затраты на обслуживание оборудования и, возможно, стабильность нагревания посредством уменьшения охлаждения, которое происходит во время перемещения (когда нагревание во время перемещения невозможно, как в случае нескольких разъединенных областей).
7) Продуманный расчет в реальном времени оптимального перемещения преобразователя - В то время как текущая реализация нагревает самый холодный из подобъемов при необходимости, установка приоритетов перемещения может обеспечить дальнейшую оптимизацию, приводящую к более эффективному, возможно, более безопасному нагреванию. Перемещение преобразователя вызывает артефакты в термометрии MR, которые могли бы оказать влияние на температурную обратную связь, и поэтому должно быть или минимизировано, или учтено. Примеры могут учесть артефакты, посредством игнорирования тех изображений термометрии MR, которые были получены во время перемещения преобразователя и с помощью мультибазисного отображения. Артефакты могли бы также быть минимизированы посредством минимизации времени и/или расстояния перемещения преобразователя. Это может быть достигнуто посредством перемещения преобразователя вдоль кратчайшего пути. Чтобы нагреть периферические части целевого объема (часть, которая ограничивает ненагретую ткань и, следовательно, испытывает самую большую относительную теплоотдачу), может также быть необходимо переместить преобразователь вдоль самого длинного пути. Кроме того, коэффициент охлаждения ткани и коэффициент перемещения передатчика могут использоваться для выбора подобъема, который оптимально размещен, чтобы обеспечить минимальное охлаждение во время механического перемещения преобразователя к нему. Это может использоваться вместе с обновлениями подобъема в реальном времени и с другими вариантами осуществления, описанными в настоящем описании.
Использование множества размеров пределов электронного отклонения - Подразбиение целевого объема на подобъемы с использованием единственного предела электронного отклонения достаточно для конформного нагревания большого объема, как продемонстрировано данными, представленными в этом ID. Однако использование переменных или множества размеров пределов электронного может обеспечить более быстрее нагревание, особенно при комбинировании с обновлениями в реальном времени разделения объема, описанного выше. Использование меньших пределов электронного отклонения может обеспечить большую пространственную точность нагревания (фокусная точка является более рассеянной при увеличенном отклонении), которая могла бы быть полезной в областях нагрева, близких к жизненно важным структурам (рядом с кровеносными сосудами или нервами), тогда как большие пределы отклонения могут использоваться для нагревания подобъемов, которые не требуют точных пространственных определений (таких как ткань опухоли далеко от границ опухоли).
8) Способность включать границу вокруг намеченной области - значительное увеличение максимального нагретого объема, предоставляемого конформным алгоритмом MR-HIFU для большого объема, может обеспечить возможность нагрева границ вокруг поражения (включая большие поражения, обычно наблюдаемые в клинике), возможно, повышая эффективность лечения.
9) Способность планировать и выполнить комбинацию абляции и лечение умеренной гипертермией - система MR-HIFU способна и к абляции, и к нагреванию умеренной гипертермии. Это преимущество системы могло бы использоваться наряду с другими вышеупомянутыми функциями и усовершенствованиями, для обеспечения оптимального лечения. План лечения может включать информацию о неоднородности опухоли, такую как структура перфузии в опухоли, чтобы обеспечить, что различные части опухоли обрабатываются с применением подходов, которые могли бы максимизировать эффективность лечения. Например, области, которые имеют низкую перфузию, могут лучше всего лечиться посредством абляции, тогда как области, которые имеют более высокую перфузию, могут лучше лечиться посредством комбинации гипертермии и химиотерапии.
Применения для конформного алгоритма умеренной гипертермии большого объема включают MR-направляемое паллиативное устранение боли, MR-направляемую лучевую сенсибилизацию, MR-направляемую доставку химиотерапии (локальная доставка лекарственных средств), MR-направленную активацию лекарственного средства, MR-направленную доставку гена и экспрессию гена, и стимулирование физиологических и клеточных изменений (под управлением MR) с целью обеспечения клинических преимуществ. Многие из алгоритмов (разбиения объема) могут также применяться для абляции (T>55°C). Одно из главных преимуществ использования MR-HIFU для этих целей является ее способность предоставлять изображения, которыми можно руководствоваться, и точное положение поражения. Другое возможное преимущество состоит в использование множества данных визуализации, таких как высвобождение контрастного вещества из липосом или параметров переноса в ткани для внутрипроцедурной обратной связи. Это могло бы значительно увеличить размер поражений или объемов, которые могли бы лечиться с помощью комбинации умеренной гипертермии и химиотерапии или лучевой терапии.
Фиг. 8 иллюстрирует интенсивность сигнала магнитного резонанса и флуоресценцию доксорубицина после инъекции iLTSL и нагрева с помощью MR-HIFU. Изображение 800 показывает интенсивность сигнала перед инъекцией iLTSL. Изображение 802 показывает интенсивность сигнала после инъекции iLTSL. Изображение 804 показывает пример температурной карты во время нагревания, наложенной на интенсивность сигнала, полученную с помощью взвешенного сканирования с протонной плотностью для планирования лечения. На фиг. 806 показана интенсивность сигнала после четырех десятиминутных сеансов нагревания. На фиг. 808 показана флуоресценция доксорубицина в приблизительном местоположении нагревания.
Как упомянуто выше, фиг. 9 иллюстрирует интенсивность ЯМР-сигнала и флуоресценцию доксорубицина после инъекции iLTSL и нагревания с помощью MR-HIFU. Изображение интенсивности сигнала 800) до инъекции iLTSL и изображение 802) - после инъекции iLTSL. Изображение 804), пример температурной карты во время нагревания, наложенной на интесивность сигнала, полученной с помощью взвешенного сканирования с протонной плотностью для планирования лечения. Изображение 806), интесивность сигнала после четырех 10-минутных процедур нагревания. Изображение 808), флуоресценция доксорубицина в приблизительном местоположении нагревания. Следует отметить, что на изображениях 800, 802 и 806 приведены T1-взвешенные изображения, тогда как изображение 804 показывает взвешенное по протонной плотности изображение.
В некоторых случаях может быть полезно выполнить мультибазисную коррекцию. Движение преобразователя ультразвука может вмешаться в магнитно-резонансную визуализацию. Это может вызвать артефакты на фазовых изображениях и затруднить определение температурных изменений. Это может быть удалено посредством выполнения мультибазисной визуализации. Она выполняется посредством сбора фазовых изображений магнитного резонанса в каждом отдельном местоположении преобразователя до начала нагревания и последующего вычитания соответствующих изображений из фазовых изображений, собранных во время нагревания. В некоторых случаях может также быть полезно исправить естественное смещение фокуса. Внутритканевая идентичность или геометрия может вызвать отклонение реальных фокусов от естественного фокуса. Это может потребовать специфичной коррекции местоположения преобразователя. Может быть полезно вычислить естественное смещение фокуса для каждого местоположения преобразователя. Это может быть осуществлено плоскость за плоскостью. В некоторых случаях может быть полезно скорректировать мощность и скомпенсировать нагревание вне плоскости. Когда используется большее электронное отклонение, оно вызывает дефокусировку, которая вызывает понижение мощности. Это может также увеличить нагревание близлежащих областей преобразователем ультразвука. Для нагревания близлежащих областей может быть полезным добавление пространственного смещения с целью корректировки положения преобразователя. Для понижения в мощности, вызванного дефокусировкой, может быть полезным увеличение выдаваемой мощности с целью компенсации уменьшения мощности.
Несмотря на то, что изобретение было проиллюстрировано и подробно описано на чертежах и в предшествующем описании, такую иллюстрацию и описание следует считать иллюстративными или примерными, а не ограничивающими; изобретение не ограничено раскрытыми вариантами осуществления.
Другие вариации раскрытых вариантов осуществления могут быть поняты и произведены специалистами в данной области техники при практическом применении заявляемого изобретения на основании изучения чертежей, раскрытия и прилагаемой формулы изобретения. В формуле изобретение слово "содержащий" не исключает другие элементы или этапы и единственное число не исключает множества. Единственный процессор или другой модуль могут выполнять функции нескольких элементов, изложенных в формуле изобретения. Сам факт того, что определенные меры излагаются во взаимно различных зависимых пунктах формулы изобретения, не показывает, что комбинация этих мер не может использоваться с выгодой. Компьютерная программа может храниться/распространяться на соответствующей носителе информации, таком как оптический носитель или твердотельный накопитель, поставляемый или как часть других технических средств, но может также распространяться в других формах, например, через Интернет или другие проводные или беспроводные телекоммуникационные системы. Любые условные обозначения в формуле изобретения не должны рассматриваться как ограничивающие ее объем.
Список литературы
[1] M. O. Kohler, C. Mougenot, B. Quesson et al., “Volumetric HIFU ablation under 3D guidance of rapid MRI thermometry,” Med Phys, vol. 36, no. 8, pp. 3521-35, Aug, 2009.
[2] R. Staruch, R. Chopra, and K. Hynynen, “Localised drug release using MRI-controlled focused ultrasound hyperthermia,” Int J Hyperthermia, vol. 27, no. 2, pp. 156-71, 2011.
[3] P. M. Harari, K. H. Hynynen, R. B. Roemer et al., “Development of scanned focussed ultrasound hyperthermia: clinical response evaluation,” Int J Radiat Oncol Biol Phys, vol. 21, no. 3, pp. 831-40, Aug, 1991.
[4] J. K. Enholm, M. O. Kohler, B. Quesson et al., “Improved volumetric MR-HIFU ablation by robust binary feedback control,” IEEE Trans Biomed Eng, vol. 57, no. 1, pp. 103-13, Jan, 2010.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
200 медицинский инструмент
202 система магнитно-резонансной визуализации
204 система сфокусированного ультразвука высокой интенсивности
206 магнит
208 канал магнита
210 катушка градиента магнитного поля
212 источник питания катушки градиента магнитного поля
214 радиочастотная катушка
216 приемопередатчик
218 зона визуализации
220 субъект
222 опора субъекта
224 заполненная жидкостью камера
226 ультразвуковой преобразователь
228 механическая система позиционирования
230 привод
232 траектория ультразвука
234 ультразвуковое окно
236 гелевая подушка
238 фокус
240 целевая зона
242 компьютерная система
244 процессор
246 аппаратный интерфейс
248 пользовательский интерфейс
250 компьютерное запоминающее устройство
252 компьютерная память
260 определение зоны фокусировки
262 координаты целевой зоны
264 координаты подзоны
266 координат положения преобразователя
268 последовательность импульсов
270 данные магнитно-резонансной термометрии
272 последовательности
274 карты температурного свойства
280 модуль управления
282 модуль деления на подзоны
284 модуль восстановления изображения
286 алгоритм управления температурой
288 алгоритм выбора подзоны
300 визуализация
302 магнитно-резонансная термометрия
304 планирование лечения
306 цикл обратной связи разрушения ультразвуком
308 алгоритм разбиения на зоны лечения
310 мультибазисное исправление
312 коррекция пространственного смещения преобразователя
314 регулирование температуры с обратной связью
316 дерево решений
318 механическое перемещение
400 вид целевой зоны
402 вид целевой зоны
404 вид целевой зоны
406 средняя осей
408 центр масс
410 наиболее удаленные вокселы
412 фокусная точка
414 зона фокусировки
416 подзона 1
418 подзона 2
420 подзона 3
422 подзона 4
424 подзона 5
426 подзона 6
428 подзона 7
430 подзон 8
500 получение данных магнитно-резонансной термометрии
502 дерево решений
504 результат решения
506 следующая подзона, которая должна быть нагрета
600 решение
602 визуализация
604 задержка
606 нагревание
608 перемещение
610 время
700 схема планирования
702 тепловое изображение
704 график зависимости температуры от времени
706 первая подзона
708 вторая подзона
710 средняя температура
712 нагревание началось
714 нагревание остановлено



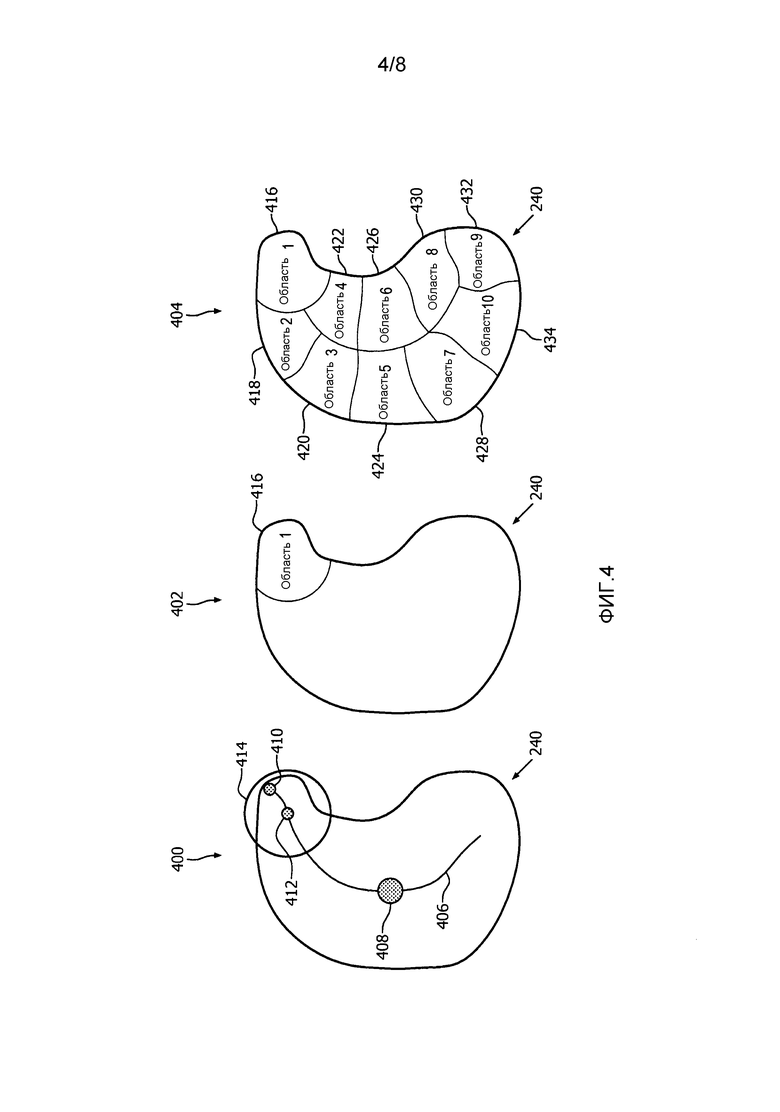




Группа изобретений относится к медицинской технике, а именно к медицинским диагностическим магнитно-резонансным системам. Медицинский инструмент содержит систему магнитно-резонансной визуализации для получения данных магнитно-резонансной термометрии от субъекта, систему сфокусированного ультразвука высокой интенсивности, содержащую преобразователь ультразвука с электронно-управляемым фокусом, которая содержит механическую систему позиционирования преобразователя ультразвука, при этом электронно-управляемый фокус реализован с возможностью настройки фокуса в пределах зоны фокусировки, а местоположение зоны фокусировки зависит от положения преобразователя ультразвука, память для хранения исполнимых машиной инструкций, процессор для управления медицинским инструментом, побуждающий выполнять получение целевой зоны, описывающей объем в пределах субъекта, при этом целевая зона больше зоны фокусировки, разделение целевой зоны на множество подзон, при этом каждая из множества подзон имеет положение преобразователя, при этом, когда преобразователь находится в положении преобразователя, зона фокусировки содержит подзону, определение последовательности для перемещения положения преобразователя в каждую из множества подзон, определение выбранной подзоны, выбираемой из множества подзон с использованием последовательности, при этом каждая из подзон делится на области, причем выполнение инструкций побуждает процессор поддерживать в целевой зоне целевую температуру в течение предварительно заданного периода времени посредством многократного управления механической системой позиционирования с целью перемещения преобразователя в положение преобразователя выбранной подзоны; получения данных магнитно-резонансной термометрии, при этом данные магнитно-резонансной термометрии описывают температуру вокселов в подзоне, определения карты температурных свойств, описывающей температуру в каждом из вокселов с использованием данных магнитно-резонансной термометрии, нагревания области подзоны независимо до целевой температуры посредством управления электронно-управляемым фокусом с помощью алгоритма температурной обратной связи, который использует карту температурных свойств, изменения выбранной подзоны с использованием последовательности. Машиночитаемый носитель обеспечивает выполнение процессором инструкций для управления медицинским инструментом. Использование изобретений обеспечивает увеличение объема области непрерывной гипертермической обработки в течение длительного периода времени. 2 н. и 12 з.п. ф-лы, 8 ил., 1 табл.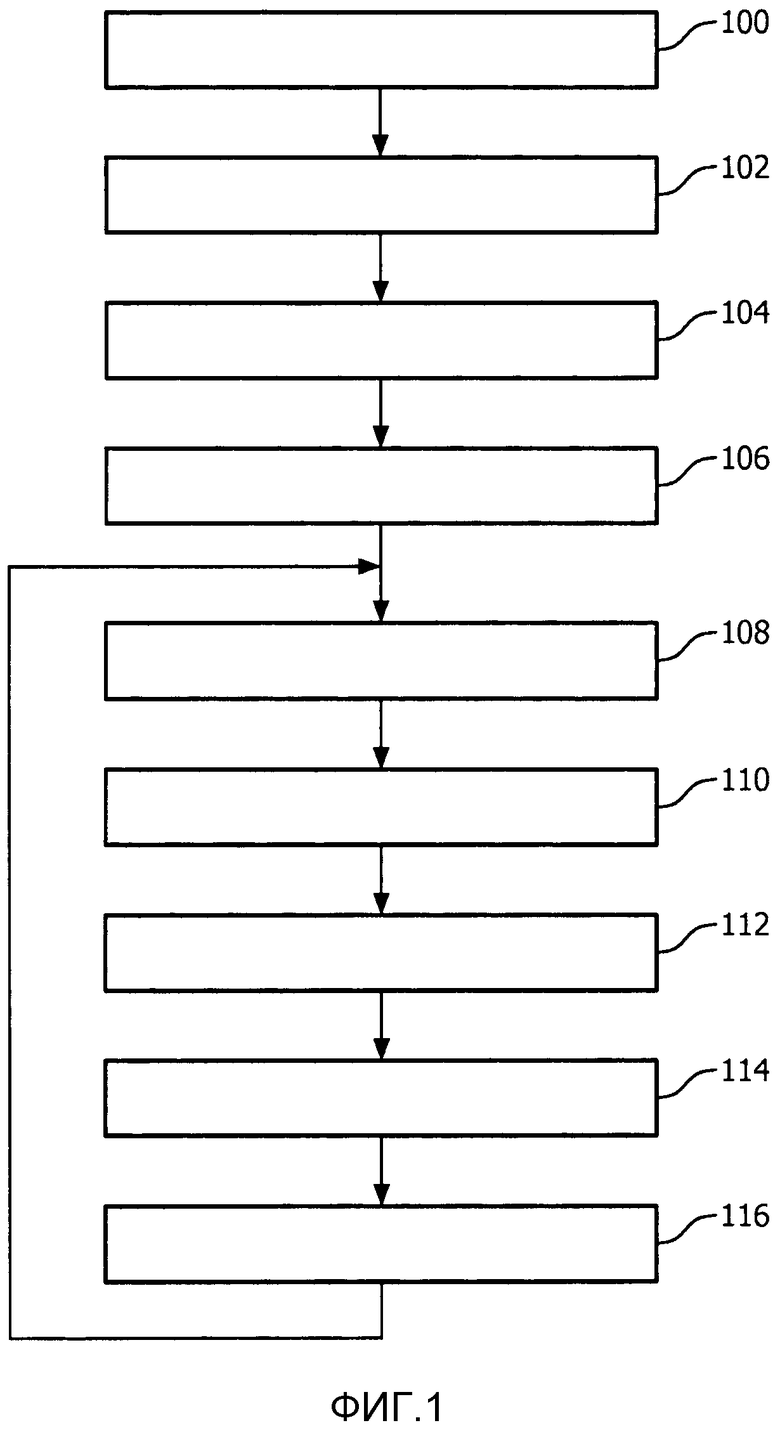
1. Медицинский инструмент (200), содержащий:
- систему (202) магнитно-резонансной визуализации для получения данных (270) магнитно-резонансной термометрии от субъекта (220) в зоне (218) визуализации;
- систему (204) сфокусированного ультразвука высокой интенсивности, содержащую преобразователь (226) ультразвука с электронно-управляемым фокусом, при этом система сфокусированного ультразвука высокой интенсивности дополнительно содержит механическую систему (228) позиционирования для позиционирования преобразователя ультразвука, при этом электронно-управляемый фокус реализован с возможностью настройки фокуса в пределах зоны (414) фокусировки и при этом местоположение зоны фокусировки зависит от положения преобразователя ультразвука;
- память (252) для хранения исполнимых машиной инструкций (280, 282, 284, 286, 288);
- процессор (244) для управления медицинским инструментом, при этом выполнение инструкций побуждает процессор выполнять:
- получение (100) целевой зоны (240, 264), описывающей объем в пределах субъекта, при этом целевая зона больше зоны фокусировки;
- разделение (102) целевой зоны на множество подзон (416, 418, 420, 422, 424, 426, 428, 430, 432, 434), при этом каждая из множества подзон имеет положение (266) преобразователя, при этом, когда преобразователь находится в положении преобразователя, зона фокусировки содержит подзону;
- определение (104) последовательности (272) для перемещения положения преобразователя в каждую из множества подзон;
- определение (106) выбранной подзоны, выбираемой из множества подзон с использованием последовательности, при этом каждая из подзон делится на области;
причем выполнение инструкций дополнительно побуждает процессор поддерживать в целевой зоне целевую температуру в течение предварительно заданного периода времени посредством многократного:
- управления (108) механической системой позиционирования с целью перемещения преобразователя в положение преобразователя выбранной подзоны;
- получения (110) данных магнитно-резонансной термометрии, при этом данные магнитно-резонансной термометрии описывают температуру вокселов в подзоне;
- определения (112) карты (274) температурных свойств, описывающей температуру в каждом из вокселов с использованием, по меньшей мере, данных магнитно-резонансной термометрии;
- нагревания (114) области подзоны независимо до целевой температуры посредством управления электронно-управляемым фокусом с помощью алгоритма (286) температурной обратной связи, который использует карту температурных свойств; и
- изменения (116) выбранной подзоны с использованием последовательности.
2. Медицинский инструмент по п. 1, в котором выполнение инструкций дополнительно побуждают процессор выполнять
- определение температурного свойства для каждой из множества подзон с использованием данных магнитно-резонансной термометрии;
- выбор следующей подзоны с использованием температурного свойства для каждой из множества подзон; и
- изменение последовательности таким образом, чтобы следующая подзона была следующей в последовательности.
3. Медицинский инструмент по п. 1, в котором выполнение инструкций дополнительно побуждает процессор выполнять управление механической системой позиционирования с целью перемещения преобразователя ультразвука в положение преобразователя для каждой из множества подзон до начала нагрева целевой зоны до целевой температуры.
4. Медицинский инструмент по п. 3, в котором выполнение инструкций дополнительно побуждает процессор выполнять получение калибровочных данных магнитно-резонансной термометрии при нахождении в положении преобразователя для каждой из множества подзон до нагревания целевой зоны до целевой температуры, и при этом карту температурного свойства определяют с использованием, по меньшей мере, калибровочных данных магнитного резонанса.
5. Медицинский инструмент по п. 3, в котором выполнение инструкций дополнительно побуждает процессор выполнять:
- тестовое ультразвуковое воздействие с использованием системы сфокусированного ультразвука высокой интенсивности при нахождении в положении преобразователя для по меньшей мере двух из множества подзон до нагревания целевой зоны до целевой температуры; и
- определение электронной коррекции фокуса для каждой из множества подзон, и/или настройки местоположения зоны фокусировки для по меньшей мере двух из множества подзон, и/или вычисления скорости повышения температуры для каждой из множества подзон.
6. Медицинский инструмент по п. 1, в котором выполнение инструкций дополнительно побуждает процессор выполнять многократное вычисление коэффициентов перфузии и/или коэффициентов рассеяния для каждого из вокселов с использованием данных магнитного резонанса.
7. Медицинский инструмент по п. 6, в котором алгоритм управления температурой с обратной связью имеет параметры алгоритма управления температурой, при этом выполнение инструкций дополнительно побуждает процессор выполнять многократное повторное вычисление параметров алгоритма управления температурой с использованием коэффициентов перфузии и/или коэффициентов рассеяния.
8. Медицинский инструмент по п. 1, в котором алгоритм управления температурой с обратной связью представляет собой один из следующих алгоритмов: бинарный алгоритм управления температурой, пропорциональный алгоритм управления температурой, пропорционально-интегральный алгоритм управления температурой и пропорционально-интегрально-производный алгоритм управления температурой.
9. Медицинский инструмент по п. 1, в котором целевая зона разделяется на множество подзон с применением преобразования к средним осям.
10. Медицинский инструмент по п. 1, при этом медицинский инструмент содержит жидкостную систему охлаждения, которая обеспечивает циркуляцию жидкости для охлаждения субъекта, при этом жидкостная система охлаждения выполнена с возможностью поддержания рабочей температуры жидкости и при этом выполнение инструкций дополнительно побуждает процессор выполнять:
- многократное получение данных магнитного резонанса, описывающих фазы вращения жидкости, с целью определения изменений в фазе вращения; и
- коррекцию карты температурного свойства с использованием изменений в фазе вращения жидкости.
11. Медицинский инструмент по п. 1, в котором выполнение инструкций дополнительно побуждает процессор выполнять настройку размера и/или местоположения подзон и/или положения преобразователя после начала поддержания целевой температуры в целевой зоне.
12. Медицинский инструмент по п. 1, в котором выполнение инструкций дополнительно побуждает процессор выполнять нагревание целевой зоны при изменении выбранной подзоны.
13. Медицинский инструмент по п. 11, в котором алгоритм дерева решений применяется для запуска изменения выбранной подзоны.
14. Медицинский инструмент по любому из предыдущих пунктов, при этом целевая температура имеет одно из следующих значений: между 38 и 40 градусами Цельсия, между 39 и 40 градусами Цельсия, между 40 и 45 градусами Цельсия, между 40 и 44 градусами Цельсия, между 40 и 43 градусами Цельсия, между 40 и 42 градусами Цельсия, между 40 и 41 градусом Цельсия, между 41 и 45 градусами Цельсия, между 41 и 44 градусами Цельсия, между 41 и 43 градусами Цельсия, между 41 и 42 градусами Цельсия, между 42 и 45 градусами Цельсия, между 42 и 44 градусами Цельсия, между 42 и 43 градусами Цельсия, между 43 и 45 градусами Цельсия, между 43 и 44 градусами Цельсия, между 44 и 45 градусами Цельсия, между 38 и 39 градусами Цельсия, между 52 и 55 градусами Цельсия, больше либо равна 55 градусам Цельсия и между 50 и 55 градусами Цельсия.
15. Машиночитаемый носитель информации, имеющий компьютерную программу, хранящуюся на нем, содержащую исполнимые машиной инструкции (280, 282, 284, 286, 288) для выполнения процессором (244), управляющим медицинским инструментом (200) который содержит систему (202) магнитно-резонансной визуализации, с целью получения данных (270) магнитно-резонансной термометрии от субъекта (220) в зоне (218) визуализации, при этом медицинский инструмент также содержит систему (226) сфокусированного ультразвука высокой интенсивности, содержащую преобразователь (226) ультразвука с электронно-управляемым фокусом (238), при этом система сфокусированного ультразвука высокой интенсивности дополнительно содержит механическую систему (228) позиционирования для позиционирования преобразователя ультразвука, при этом электронно-управляемый фокус реализован с возможностью настройки фокуса в пределах зоны (414) фокусировки, при этом местоположение зоны фокусировки зависит от положения преобразователя ультразвука и при этом выполнение инструкций дополнительно побуждает процессор выполнять:
- получение (100) целевой зоны (240, 264), описывающей объем в пределах субъекта, при этом целевая зона больше зоны фокусировки;
- разделение (102) целевой зоны на множество подзон (416, 418, 420, 422, 424, 426, 428, 430, 432, 434), при этом каждая из множества подзон имеет положение преобразователя (266), при этом, когда преобразователь находится в положении преобразователя, зона фокусировки содержит подзону, при этом каждая подзона разделена на области;
- определение (104) последовательности (272) для перемещения положения преобразователя в каждую из множества подзон;
- определение (106) выбранной подзоны, выбираемой из множества подзон, с использованием последовательности;
при этом выполнение инструкций дополнительно побуждает процессор выполнять поддержание в целевой зоне целевой температуры в течение предварительно заданного периода времени посредством многократного:
- управления (108) механической системой позиционирования с целью перемещения преобразователя в положение преобразователя выбранной подзоны;
- получения (110) данных магнитно-резонансной термометрии, при этом данные магнитно-резонансной термометрии описывают температуру вокселов в подзоне;
- определения (112) карты температурных свойств, описывающей температуру в каждом из вокселов с использованием, по меньшей мере, данных магнитно-резонансной термометрии;
- нагревания (114) каждой области независимо до целевой температуры посредством управления электронно-управляемым фокусом с помощью алгоритма температурной обратной связи, который использует карту температурных свойств; и
- изменения (116) выбранной подзоны с использованием последовательности.
| WO 2011086477 A1, 21.07.2011 | |||
| US 2009198131 A1, 06.08.2009 | |||
| US 20100081857 A1, 01.04.2010 | |||
| US 2010286519 A1, 11.11.2010 | |||
| JP 2004105502 A, 08.04.2004 | |||
| Устройство для автоматического контроля средней крупности дробленного материала | 1980 |
|
SU884740A1 |
| ТЕРАПЕВТИЧЕСКАЯ СИСТЕМА НА ОСНОВЕ СФОКУСИРОВАННОГО УЛЬТРАЗВУКА | 2005 |
|
RU2366475C2 |

