Изобретение предназначено для решения задач автоматического измерения (определения) и коррекции параметров стабилизатора вооружения (СВ), определяющих степень демпфирования его приводов, а именно количества перебегов и величины первого перебега.
В настоящее время степень демпфирования приводов наведения СВ в вертикальной (ВН) и горизонтальной (ГН) плоскостях является обязательной составляющей методики диагностирования системы управления огнем (СУО) различных типов вооружения как в условиях производственных и ремонтных предприятий, так и непосредственно при эксплуатации в войсковых частях. Измерение (определение) и коррекция данных параметров реализуются с помощью определенных способа и оборудования, позволяющих настроить СВ в соответствии с требованиями.
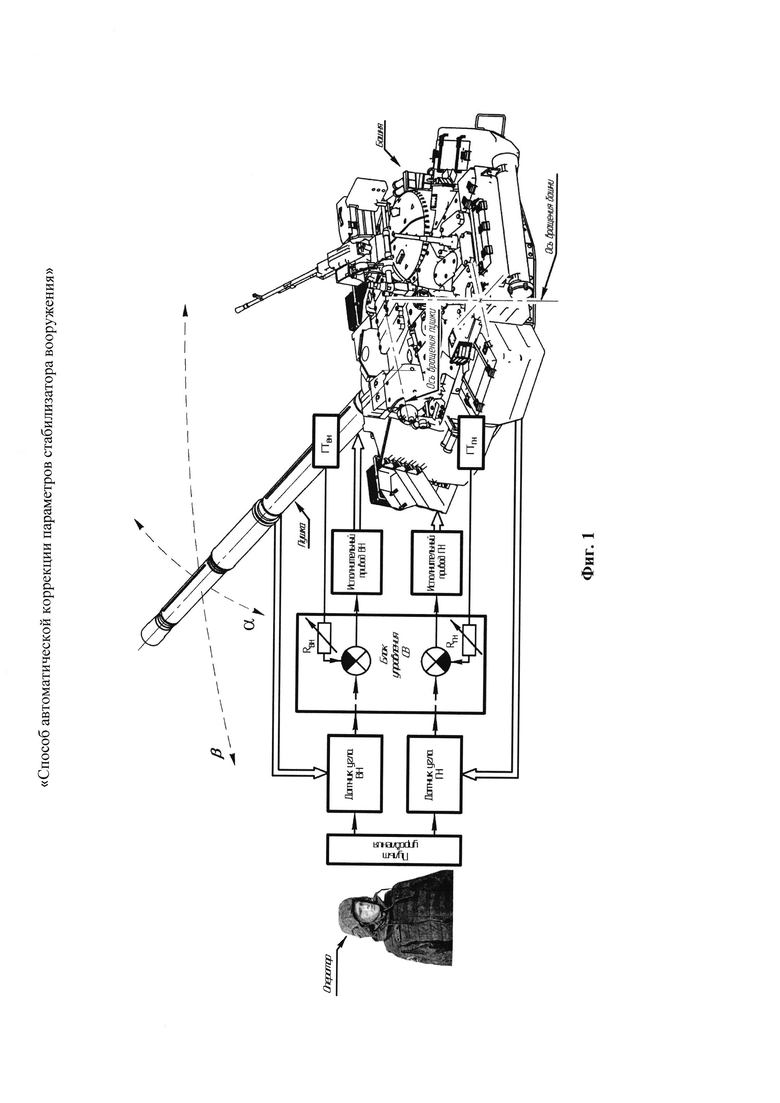
Конструктивно СВ различных образцов вооружения в зависимости от типа и года выпуска как правило имеют отличия по составу оборудования и характеристикам. Но в целом современный СВ, как правило, представляет собой автоматическую систему, выполненную по принципу комбинированного регулирования, и в общем представлении может быть описан схемой, представленной на фиг. 1.
Как видно из представленной схемы, СВ состоит из приводов вертикального и горизонтального наведения (приводы ВН и ГН), каждый из которых в свою очередь включает цепи пульта управления, гироскопический датчик, цепи блока управления и исполнительный привод, соответственно по ВН и ГН.
Реализация регулирования по отклонению обеспечивается за счет охвата элементов СВ жесткими обратными связями по положению вооружения и с башни, соответственно, на гироскопические датчики ВН и ГН.
Для повышения качества переходных процессов в СВ применяются дополнительные каналы регулирования, компенсирующие внешние воздействия (возмущения) (на фиг. 1 не показано) и гибкие корректирующие обратные связи сдатчиков скорости, в качестве которых применяются гиротахометры ВН и ГН (ГТВН и ГТГН),через регулировочные сопротивления RГН и RВН на сумматоры блока управления СВ (фиг. 1).
Известный способ измерения (определения) и коррекции параметров демпфирования приводов наведения СВ заключается (фиг. 1) [Техническое описание и инструкция по эксплуатации Танк Т-72Б. - М.: Военное издательство, 1992. - С. 65-125] в придании поочередно вооружению (пушке) и башне «перебросочных» (максимальных) угловых скоростей с резкими остановками и дальнейшим оценивании величин первых перебегов и количества совершенных колебаний, соответственно вооружения (пушки) и башни. При измерении (определение) параметров демпфирования привода ВН (т.е. оценку характера колебаний вооружения в вертикальной плоскости по углу α относительно оси вращения (цапф) вооружения (пушки)) осуществляют визуального по взаимному расположению меток (рисок) на казенной части вооружения и его ограждения. Измерение (определение) параметров демпфирования привода ГН (т.е. оценку характера колебаний башни в горизонтальной плоскости по углу β относительно оси ее вращения) осуществляют также визуально по положению стрелки азимутального указателя. При этом для достижения более высокой точности измерения рекомендуется проводить по крайней мере три раза с последующим усреднением результатов, что, соответственно, увеличивает время на осуществление данного способа.
Если измеренные параметры не соответствуют требуемому уровню, то оператор вручную поочередно изменяет коэффициенты передачи корректирующих гибких обратных связей, перемещая подвижные контакты регулировочных сопротивлений, соответственно, RГН и RВН. Циклы измерений и регулировки параметров демпфирования приводов ВН и ГН повторяются оператором до тех пор, пока не будет обеспечено соответствие параметров демпфирования приводов ВН и ГН установленным (заводским, эксплуатационным) показателям.
Очевидными недостатками известного способа измерения (определения) и коррекции параметров демпфирования являются следующие:
все мероприятия выполняются человеком, требуют определенные навыки и квалификацию, в связи с чем достаточно велики временные затраты на проведение всех проверок и настроек, а также имеет место влияние на точность результата субъективных ошибок привлекаемых специалистов;
способ разработан более полувека назад и уже мало отвечает современным требованиям, дает результаты относительной точности, которые в свою очередь не могут быть учтены и систематизированы с помощью современных средств вычислительной техники для их дальнейшей статистической обработки за воинские подразделения, часть или соединение.
Таким образом, задачами, на решение которых направлено заявляемое изобретение, являются:
во-первых, исключение из процесса проверки и регулировки параметров СВ операций по оценке параметров демпфирования, выполняемых «вручную» привлекаемыми специалистами;
во-вторых, обеспечение возможности учета, хранения, систематизации и дальнейшей статистической обработки с помощью современных вычислительных средств сводных данных за подразделение, часть и т.п.
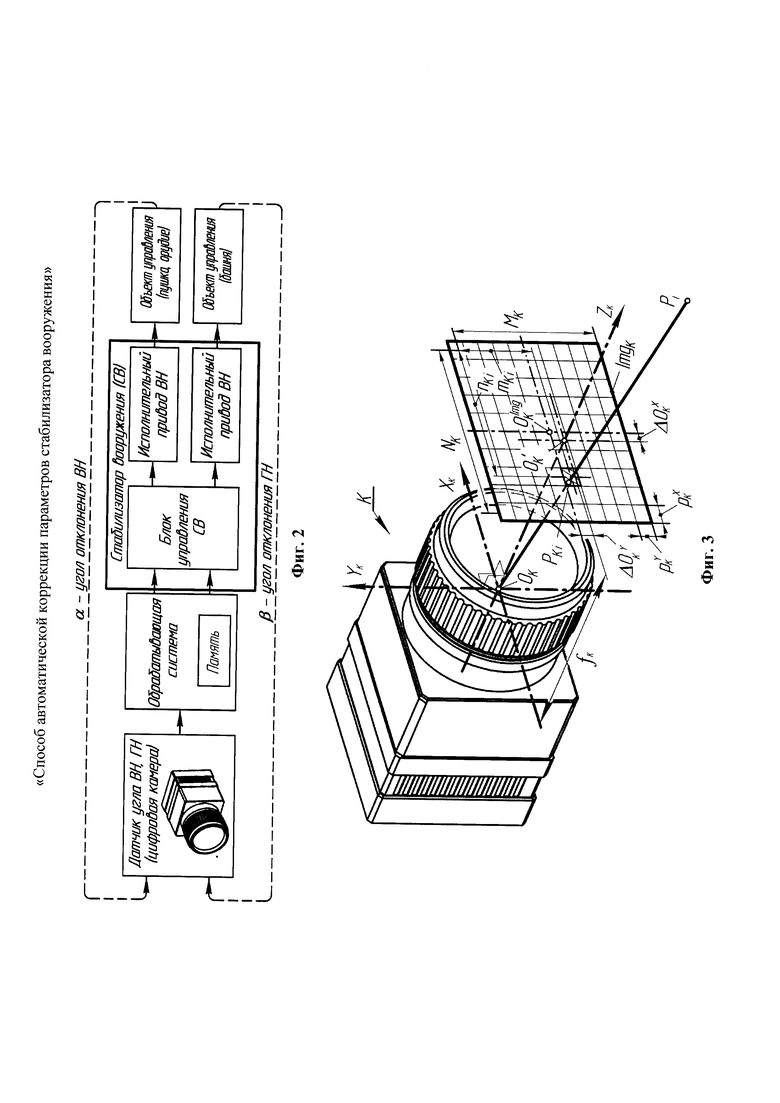
Решение первой задачи реализуется за счет введения в приводы ВН и ГН СВ дополнительных контуров автоматического управления по отклонению по схеме: датчик ВН, ГН (цифровая камера) - обрабатывающая система - исполнительные приводы ВН, ГН СВ - объекты управления (вооружение [орудие, пушка] и башня образца вооружения) - измеряемые величины (углы отклонения ВН и ГН, соответственно, α и β) - датчик ВН, ГН (фиг. 2).
Значения всех проведенных измерений могут сохранятся в памяти обрабатывающей системы, где может осуществляться их дальнейшая статистическая обработка, в том числе и с учетом данных с других боевых машин подразделения, части и т.п., тем самым решается вторая задача.
Основным техническим результатом, обеспечиваемым приведенной совокупностью признаков, является повышение точности и уменьшение затрачиваемого времени на измерение и осуществление коррекции степени демпфирования приводов наведения СВ СУО образца вооружения.
В качестве дополнительных результатов можно указать снижение требований к уровню квалификации специалистов, привлекаемых для осуществления проверки и регулировки параметров СВ, устранение возможности влияния на процесс проверки и регулировки параметров СВ субъективных ошибок, свойственных человеку, а также возможный экономический эффект по совершенствованию системы технического обслуживания.
Для осуществления заявленного способа в качестве датчика угла, позволяющего одновременно измерять угловые отклонения в вертикальной и горизонтальной плоскостях, используют цифровую видеокамеру К, выполненную с возможностью захвата и передачи в обрабатывающую систему цифровых изображений Imgi окружающей местности, где i - номер кадра, через кабели (например, кабели универсальной последовательной шины USB) или по беспроводной связи (например, Wi-Fi).
Цифровые изображения Imgi (фиг. 3) получаемые с камеры К, состоят из пикселей. Каждый пиксель характеризуется значением, которое состоит из полутонового значения или цветового значения.
В полутоновых изображениях значение пикселя представляет собой величину, которая характеризует яркость пикселя. Наиболее общим форматом описания пикселя является байт изображения, в котором значение пикселя представлено восьмиразрядным целым числом, лежащим в диапазоне возможных значений от 0 до 255. Как правило, значение пикселя, равное нулю, используют для обозначения черного пикселя, а значение 255 используют для обозначения белого пикселя. Промежуточные значения описывают различные оттенки полутонов.
В цветных изображениях для описания каждого пикселя (расположенного в цветовом пространстве размерности RGB - красный, зеленый, синий) должны быть отдельно определены красная, зеленая и синяя компоненты. Иными словами, значение пикселя фактически представляет собой вектор, описанный тремя числами. Три различные компоненты могут быть сохранены как три отдельных полутоновых изображения, известные как цветовые плоскости (по одной для красного, зеленого и синего цветов), которые можно воссоединять при отображении или при обработке.
Для установления физической связи между положением изображения объекта интереса P на цифровых изображениях Imgi и его положением в системе координат ОКYКXКZК камеры К размеры пикселей изображений Imgi в горизонтальной и вертикальной плоскостях принимают равными физическим размерам фотоячеек (пикселей) фотоприемного устройства (например, ПЗС- или ПЗИ-матрицы) камеры К, соответственно, 

Предполагаются два варианта осуществления автоматической коррекции параметров СВ заявленным способом: по удаленной точке и по измерительному щиту.
При коррекции по удаленной точке в качестве опорной точки принимается объект или участок местности, расположенные на значительном удалении от боевой машины. Как правило, это расстояние составляет порядка 1600 и более метров. Коррекция по измерительному щиту предпочтительна в заводских и парковых условиях, когда дальность прямой видимости ограничена местностью или различными строениями.
Измерительный щит представляет собой ровную поверхность, на которой на фиксированном расстоянии L друг от друга нанесены маркеры в виде геометрических примитивов (например, на фиг. 4 на измерительном щите нанесено четыре квадрата). Связано это с достаточной простотой организации алгоритмов автоматического распознавания на изображении подобных форм, например, на основе алгоритмов математической морфологии. В любом случае и количество и форма маркеров могут иметь и другое число, и более сложные формы, а определяться это будет только требованиями по точности к результату измерений и ограничениями по производительности применяемых вычислительных ресурсов.
Обрабатывающая система, являющаяся, например, удаленным компьютером, таким как ноутбук или персональный компьютер (рабочая станция), должна обеспечивать выбор пользователем изображений и/или ввод команд обработки, прием начального кадра с исходным положением удаленной точки (измерительного щита) и всех следующих кадров с текущими положениями удаленной точки (измерительного щита) с камеры К, дальнейшую их автоматической обработку с получением переходных характеристик, выработкой сигналов управления на приводы ВН и ГНСВ, хранение измеренных параметров, их статистическую обработку, вывод сигналов обратной связи в блок управления стабилизатора вооружения с целью коррекции его параметров.
Обрабатывающая система должна содержать исполняемые модули или команды с возможностью выполнения по меньшей мере одним процессором, память для хранения данных, пользовательский интерфейс, содержащий дисплей, такой как жидкокристаллический монитор, для просмотра видеоданных и устройство управления и ввода данных, такое как клавиатура или указательное устройство (например, манипулятор типа «мышь», шаровой указатель, стилус, сенсорная панель или другое устройство), для обеспечения взаимодействия пользователя (оператора) с видеоданными.
Введение сигналов управления ВН и ГН в блоке управления СВ может быть реализовано путем подачи их на сумматоры каналов ВН и ГН блока управления СВ. Введение сигналов обратной связи ВН и ГН, может быть осуществлено, например, путем замены в каналах ВН и ГН, соответствующих регулировочных сопротивлений, изменяющих сигналы управления и коэффициенты обратной связи, электронными сопротивлениями, выполненными в свою очередь с возможностью изменения величины собственного электрического сопротивления по значению цифрового сигнала на входе.
Сущность изобретения поясняется чертежами, которые не охватывают и тем более не ограничивают весь объем притязаний данного изобретения, а являются лишь иллюстрирующими материалами частного случая выполнения, на которых:
на фиг. 1 показана упрощенная (в сокращенном виде) функциональная схема современного стабилизатора вооружения на примере танка;
на фиг. 2 проиллюстрированы водимые контуры регулирования в СВ для реализации заявленного способа;
на фиг. 3 отражена взаимная геометрическая связь между системой координат камеры, цифровым изображением, его элементами и объектом в пространстве;
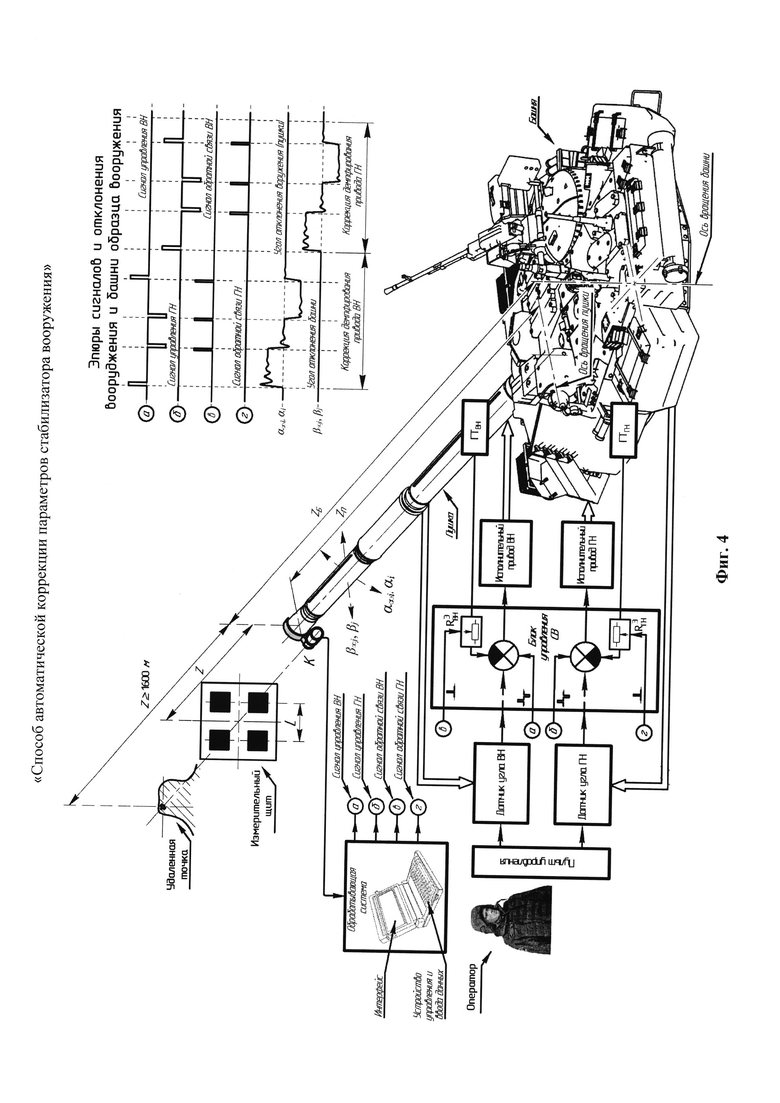
на фиг. 4 показана упрощенная (в сокращенном виде) функциональная схема современного стабилизатора вооружения на примере танка с введенными дополнительными контурами регулирования для реализации заявленного способа, так же приведены эпюры сигналов и отклонения вооружения и башни.
Для осуществления заявленного способа боевую машину предварительно размещают на горизонтальной ровной площадке. Основное вооружение (как правило, пушку) приводят к горизонтальному относительно корпуса боевой машины положению. Камеру К устанавливают неподвижно на дульном срезе канала ствола на его внешней или внутренней стороне с таким исполнением, чтобы ось симметрии вооружения и оптическую ось объектива камеры К были параллельными, а оптический центр ее объектива находился на уровне среза канала ствола пушки (вооружения) (Фиг. 4).
Осуществляют заявленный способ следующим образом.
По техническим данным камеры К вычисляют матрицу внутренних параметров 
где fК - фокусное расстояние объектива камеры К, при этом значение ƒК задают из технических данных объектива, применяемой камеры, или определяют в процессе внутренней калибровки камеры К;












NК, MК - количество столбцов и строк фотоприемного устройства высокого разрешения камеры К, при этом значения NК и MК задают из технических данных используемого фотоприемного устройства или определяют в результате ее внутренней калибровки.
Принимают с камеры К цифровые изображения Imgi (где i = 0, 1, 2, … - номер кадра) окружающей местности.
Выбирают вариант осуществления автоматической коррекции параметров СВ заявленным способом - по удаленной точке или по измерительному щиту.
При выборе варианта осуществления коррекции по удаленной точке указывают на начальном кадре Img0 изображения соответствующую ей область.
При выборе варианта осуществления коррекции по измерительному щиту, устанавливают в поле зрении камеры К измерительный щит, указывают на начальном кадре Img0 область, соответствующую измерительному щиту.
По положению центра выбранной области изображения составляют расширенный вектор начального положения 

где 




Вычисляют вектор начальных координат 


где 

После этого по результатам внутренней калибровки (или техническим данным объектива камеры К) и значениям вектора 

где 


При этом значения коэффициентов радиальной дисторсии 




По значениям матриц 



где 

Если был выбран вариант осуществления коррекции по измерительному щиту определяют расстояние Z до щита относительно оптического центра объектива камеры К, например, путем распознавания на изображении Img0 маркеров, формирования(аналогично порядку нахождения вектора 




непосредственном вычислении величины Z как среднеарифметического значения найденных значений 
Передают в блок управления СВ (в цепи привода ВН) сигнал управления ВН, представляющий собой последовательные положительные и отрицательные ступенчатые воздействия такой длительности и амплитуды (сигнал «а» на фиг. 4), чтобы обеспечивалось условие разгона вооружения до максимальной скорости в вертикальной плоскости и его резкую остановку, например, сначала вверх, а затем вниз.
При этом, на каждом i-м из следующих за Img0 изображениях Imgi осуществляют поиск изображения указанного удаленной точки (измерительного щита), например, путем сканирования и нахождения положения изображения удаленной точки (измерительного щита) по максимуму двумерной корреляционной функции.
Аналогично порядку нахождения вектора начальных скорректированных координат

Для каждого из найденных векторов 

где α∞i, αi - i-е значения углов отклонения вооружения относительно начального положения, соответственно, при осуществлении коррекции по удаленной точке (α∞i) и по измерительному щиту (αi);
 - значения второго столбца вектора
- значения второго столбца вектора
 - значения второго и третьего столбцов i-х векторов
- значения второго и третьего столбцов i-х векторов  ;
;
Z - расстояние до измерительного щита относительно оптического центра ОК камеры К;
ZП - расстояние от цапф вооружения (орудия) до дульного среза.
По найденным значениям α∞i или αi для каждого из колебаний вооружения вследствие отработки приводами ВН СВ сигналов управления ВН, строят переходные характеристики (эпюры α∞i, αi (фиг. 4)), оценивают по ним и сравнивают с заданными значениями параметры демпфирования, а именно величины первых перебегов и количество перебегов (колебаний). Если полученные параметры демпфирования привода ВН СВ не соответствуют заданным значениям, то осуществляют изменение (в большую или меньшую сторону, в зависимости от измеренных параметров) величины сигналов обратной связи на определенную (выбранную для данного стабилизатора вооружения) величину. Для чего передают измененные сигнал обратной связи на исполнительный элемент, например, электронное сопротивление 
Прекращение подачи сигналов управления и соответственно сигналов обратной связи для привода ВН будет осуществлено тогда, когда после очередного измерения выполнится условие соответствия измеренных параметров установленному уровню. После чего подают последний сигнал управления для возвращения вооружения в исходное состояние. Так на эпюрах «а», «в» (фиг. 4) в качестве примера показано, что после подачи четвертого сигнала управления ВН сигнал обратной связи ВН подан не был, так как был достигнут необходимый уровень «демпфированности» привода ВН СВ.
Осуществляют коррекцию параметров демпфирования привода ГН СВ, для чего передают в блок управления СВ (в цепи привода ГН) сигнал управления ГН, обеспечивающий разгон башни в горизонтальной плоскости до перебросочной скорости с резким торможением в конце, например, сначала влево затем в право.
Для всех j-х принятых с камеры К изображений Imgj вычисляют (аналогично порядку нахождения векторов 

Для каждого из найденных векторов 

где β∞j, βj - j-е значения углов отклонения башни относительно начального положения, соответственно, при осуществлении коррекции по удаленной точки (β∞i) и по измерительному щиту (βi);
 - значения первого столбца вектора
- значения первого столбца вектора
 - значения первого и третьего столбцов j-х векторов
- значения первого и третьего столбцов j-х векторов  ;
;
ZБ - расстояние от дульного среза орудия до центра вращения башни.
По найденным значениям β∞j или βj для каждого из колебаний башни вследствие отработки приводами ГН СВ сигналов управления ГН, строят переходные характеристики (эпюры β∞j, βj (фиг. 4)), оценивают по ним и сравнивают с заданными значениями параметры демпфирования, а именно величины первых перебегов и количество перебегов (колебаний).Если полученные параметры демпфирования привода ГН СВ не соответствуют заданным значениям, то осуществляют изменение (в большую или меньшую сторону, в зависимости от измеренных параметров) величины сигналов обратной связи на определенную фиксированную (выбранную для данного стабилизатора вооружения) величину. Передают еще один сигнал управления ГН для отклонения башни в противолодочную стороны, повторяют измерение параметров демпфирования в горизонтальной плоскости. По результатам оценки измеренных параметров снова меняют передаточный коэффициент обратной связи.
Прекращение подачи сигналов управления ГН и соответственно сигналов обратной связи для привода ГН будет аналогично коррекции привода ВН осуществлено тогда, когда после очередного измерения будет выполнено соответствие измеренных параметров установленному уровню, что будет соответствовать завершению коррекции привода ГН. После чего подают последний сигнал управления для возвращения вооружения в исходное состояние. Так на эпюрах «б», «г» (фиг. 4) в качестве примера показано, что после подачи трех сигналов управления ГН и был достигнут необходимый уровень «демпфированности» привода ГН СВ, т.е. подачи сигнала обратной связи ГН не потребовалось.
Сохраняют данные (например, наименование образца вооружения, его номер, длительность работы стабилизатора вооружения, условия проведения коррекции, данные об измеренных колебаниях, данные о количестве выработанных сигналов управления и обратной связи) о проведенной коррекции в памяти обрабатывающей системы для возможности дальнейшей, в том числе с учетом данных с других образцов вооружения, статистической обработки.
В военной технике автоматизация занимает одну из главнейших ролей, определяя такие важные качества образца вооружения, как огневая мощь, защищенность, подвижность и командная управляемость. Автоматизация все больше применяется в комплексах и системах защиты, управления вооружением, работой силовой установки и пр. Соответственно, все более актуальными являются работы, направленные на разработку систем диагностирования данных автоматических систем. Причем желательно, чтобы сама система диагностирования требовала минимального привлечения человека и обеспечивала снятие и поддержание на необходимом уровне в автоматическом режиме контролируемых параметров.
Заявленный способ автоматической коррекции параметров стабилизатора вооружения может быть полезен при разработке системы автоматического диагностирования в составе перспективной информационно-управляющей системы управления огнем модернизируемых или вновь создаваемых образцов вооружения.
Применение же в качестве датчика угла ВН и ГН цифровой видеокамеры может позволить с учетом возможностей заявленного способа:
за счет применения только одного датчика для вертикальных и горизонтальных измерений обеспечить более простую конструкцию системы автоматической диагностики;
повысить степень автоматизации выверки линий визирования прицелов и основного вооружения боевой машины;
измерять вибрации и статическую ошибку приводов наведения СВ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОЙ ВЫВЕРКИ НУЛЕВЫХ ЛИНИЙ ПРИЦЕЛИВАНИЯ ОПТИКО-ЭЛЕКТРОННЫХ КАНАЛОВ ПРИЦЕЛОВ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ | 2018 |
|
RU2695141C2 |
| СПОСОБ ВНУТРЕННЕГО ЦЕЛЕУКАЗАНИЯ С ИНДИКАЦИЕЙ ЦЕЛЕЙ ДЛЯ ОБРАЗЦОВ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2712367C2 |
| СПОСОБ ВНЕШНЕГО ЦЕЛЕУКАЗАНИЯ С ИНДИКАЦИЕЙ ЦЕЛЕЙ ДЛЯ ОБРАЗЦОВ БРОНЕТАНКОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2697047C2 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2015 |
|
RU2593931C1 |
| СИСТЕМА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2548941C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ ПО ИХ ЦИФРОВЫМ ИЗОБРАЖЕНИЯМ | 2018 |
|
RU2697822C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| Информационная обзорно-панорамная система наблюдения | 2020 |
|
RU2757061C1 |
| Комбинированный прибор наблюдения-прицел | 2022 |
|
RU2790221C1 |
| Система управления огнем боевой машины | 2022 |
|
RU2785804C1 |
Изобретение предназначено для решения задач автоматического измерения (определения) и коррекции параметров стабилизатора вооружения (СВ), определяющих степень демпфирования его приводов, а именно количества перебегов и величины первого перебега. Заявленный способ автоматической коррекции параметров стабилизатора вооружения заключается в последовательных угловых отклонениях с максимально допустимыми скоростями соответственно вооружения (пушки) и башни образца вооружения с резкими остановками и измерениях (определениях) параметров демпфирования приводов вертикального и горизонтального наведения, а именно количества перебегов, и амплитуд первых перебегов колебаний, возникающих при остановках. Причем для измерения (определения) параметров демпфирования приводов вертикального и горизонтального наведения стабилизатора вооружения в качестве датчика угла, позволяющего одновременно измерять угловые отклонения в вертикальной и горизонтальной плоскостях, используют предварительно установленную неподвижно на дульном срезе вооружения (канала ствола пушки) на его внешней или внутренней стороне цифровую видеокамеру (далее камеру) с таким исполнением, чтобы ось симметрии вооружения и оптическая ось объектива камеры были параллельными, а оптический центр ее объектива находился на уровне среза канала ствола вооружения (пушки). Технический результат - повышение точности и уменьшение затрачиваемого времени на измерение и осуществление коррекции степени демпфирования приводов наведения СВ СУО образца вооружения. 4 ил.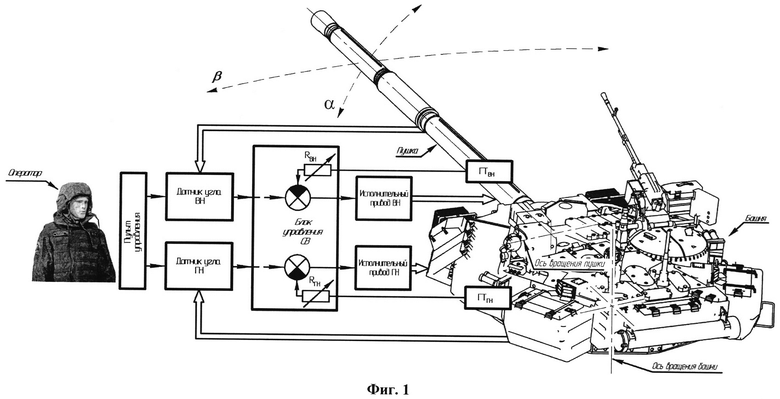
Способ автоматической коррекции параметров стабилизатора вооружения, заключающийся в последовательных угловых отклонениях с максимально допустимыми скоростями соответственно вооружения (пушки) и башни образца вооружения с резкими остановками и измерениях (определениях) параметров демпфирования приводов вертикального и горизонтального наведения, а именно количества перебегов, и амплитуд первых перебегов колебаний, возникающих при остановках, и отличающийся тем, что
для измерения (определения) параметров демпфирования приводов вертикального и горизонтального наведения стабилизатора вооружения в качестве датчика угла, позволяющего одновременно измерять угловые отклонения в вертикальной и горизонтальной плоскостях, используют предварительно установленную неподвижно на дульном срезе вооружения (канала ствола пушки) на его внешней или внутренней стороне цифровую видеокамеру (далее камеру) с таким исполнением, чтобы ось симметрии вооружения и оптическая ось объектива камеры были параллельными, а оптический центр ее объектива находился на уровне среза канала ствола вооружения (пушки),
по техническим данным камеры составляют матрицу внутренних параметров 
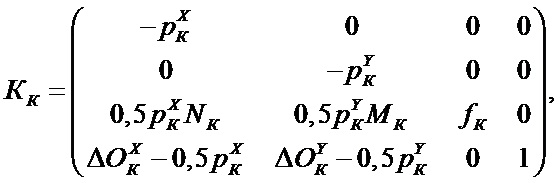
где fК - фокусное расстояние объектива камеры, при этом значение fК задают из технических данных объектива, применяемой камеры, или определяют в процессе ее внутренней калибровки;












NК, MК - количество столбцов и строк фотоприемного устройства высокого разрешения камеры, при этом значения NК и MК задают из технических данных используемого фотоприемного устройства или определяют в результате ее внутренней калибровки,
принимают с камеры цифровые изображения Imgi (где i = 0, 1, 2, … - номер кадра) окружающей местности,
выбирают вариант осуществления автоматической коррекции параметров стабилизатора вооружения - по удаленной точке (при работе на открытой местности или полевых условиях) или по измерительному щиту (при ограниченной видимости или заводских или парковых условиях), причем под удаленной точкой принимают объект или участок местности, расположенный на значительном удалении от образца вооружения, как правило 1600 и более метров, под измерительным щитом понимают ровную поверхность, на которой на фиксированном расстоянии L друг от друга нанесены маркеры в виде геометрических примитивов,
при выборе варианта осуществления коррекции по удаленной точке указывают на начальном кадре Img0 изображения соответствующую область, при выборе варианта осуществления коррекции по измерительному щиту устанавливают в поле зрении камеры измерительный щит и указывают на начальном кадре Img0 область, соответствующую измерительному щиту,
по положению центра выбранной области изображения составляют расширенный вектор начального положения 

где





вычисляют вектор начальных координат 

где 

после этого по результатам внутренней калибровки (или техническим данным объектива камеры) и значениям вектора 

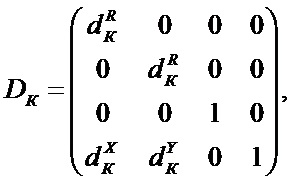
где 


при этом значения коэффициентов радиальной дисторсии 




по значениям матриц 



где 

если был выбран вариант осуществления коррекции по измерительному щиту, определяют расстояние Z до щита относительно оптического центра объектива камеры, например, путем распознавания на изображении Img0 маркеров, формирования (аналогично порядку нахождения вектора 




непосредственном вычислении величины Z как среднеарифметического значения найденных значений

осуществляют коррекцию параметров демпфирования привода вертикального наведения стабилизатора вооружения, для этого
передают в блок управления стабилизатора вооружения (в цепи привода вертикального наведения) сигнал управления, представляющий собой последовательные положительные и отрицательные ступенчатые воздействия такой длительности и амплитуды, чтобы обеспечивались условие разгона вооружения до максимальной угловой скорости в вертикальной плоскости и его резкая остановка, например, сначала вверх, а затем вниз,
при этом на каждом i-м из следующих за Img0 изображениях Imgi осуществляют поиск изображения указанного удаленной точки (измерительного щита), например, путем сканирования и нахождения положения изображения удаленной точки (измерительного щита) по максимуму двумерной корреляционной функции,
аналогично порядку нахождения вектора начальных скорректированных координат

для каждого из найденных векторов 

где α∞i, αi - i-е значения углов отклонения вооружения относительно начального положения соответственно при осуществлении коррекции по удаленной точке (α∞i) и по измерительному щиту (αi);
 - значения второго столбца вектора
- значения второго столбца вектора
 - значения второго и третьего столбцов i-х векторов
- значения второго и третьего столбцов i-х векторов  ;
;
Z - расстояние до измерительного щита относительно оптического центра ОК камеры К;
ZП - расстояние от цапф вооружения (орудия) до дульного среза,
по найденным значениям α∞i или αi для каждого из колебаний вооружения вследствие отработки приводами вертикального наведения стабилизатора вооружения сигналов управления строят переходные характеристики, оценивают по ним и сравнивают с заданными значениями параметры демпфирования, а именно величины первых перебегов и количество перебегов (колебаний),
и если полученные параметры демпфирования привода вертикального наведения не соответствуют заданным значениям, то осуществляют изменение (в большую или меньшую сторону, в зависимости от измеренных параметров) величины сигналов обратной связи на определенную (выбранную для данного стабилизатора вооружения) величину,
для чего передают измененные сигнал обратной связи на исполнительный элемент, например электронное сопротивление, блока управления стабилизатора вооружения (в контур вертикального наведения), изменяющее свое электрическое сопротивление, и, как следствие, передаточный коэффициент обратной связи привода вертикального наведения стабилизатора вооружения,
передают еще один сигнал управления для отклонения вооружения в противоположную сторону, повторяют измерение параметров демпфирования в вертикальной плоскости, по результатам оценки измеренных параметров снова меняют передаточный коэффициент обратной связи,
прекращение подачи сигналов управления и соответственно сигналов обратной связи для привода вертикального наведения осуществляют тогда, когда после очередного измерения выполнится условие соответствия измеренных параметров установленному уровню,
после чего подают последний сигнал управления для возвращения вооружения в исходное состояние,
осуществляют коррекцию параметров демпфирования привода горизонтального наведения стабилизатора вооружения,
для чего передают в блок управления стабилизатора вооружения (в цепи привода горизонтального наведения) сигнал управления, обеспечивающий разгон башни в горизонтальной плоскости до перебросочной (максимальной) угловой скорости с резким торможением в конце, например, сначала влево затем вправо,
при этом для всех j-х принятых с камеры изображений Imgj вычисляют (аналогично порядку нахождения векторов 

для каждого из найденных векторов 

где β∞j, βj - j-е значения углов отклонения башни относительно начального положения соответственно при осуществлении коррекции по удаленной точке (β ∞i) и по измерительному щиту (βi);
 - значения первого столбца вектора
- значения первого столбца вектора
 - значения первого и третьего столбцов j-х векторов
- значения первого и третьего столбцов j-х векторов  ;
;
ZБ - расстояние от дульного среза орудия до центра вращения башни,
по найденным значениям β∞j или βj для каждого из колебаний башни вследствие отработки приводами горизонтального наведения стабилизатора вооружения сигналов управления строят переходные характеристики,
оценивают по ним и сравнивают с заданными значениями параметры демпфирования, а именно величины первых перебегов и количество перебегов (колебаний), и
если полученные параметры демпфирования привода горизонтального наведения стабилизатора вооружения не соответствуют заданным значениям, то осуществляют изменение (в большую или меньшую сторону, в зависимости от измеренных параметров) величины сигналов обратной связи на определенную фиксированную (выбранную для данного стабилизатора вооружения) величину,
передают еще один сигнал управления для отклонения башни в противолодочную стороны, повторяют измерение параметров демпфирования в горизонтальной плоскости, по результатам оценки измеренных параметров снова меняют передаточный коэффициент обратной связи привода горизонтального наведения,
прекращение подачи сигналов управления и соответственно сигналов обратной связи для привода горизонтального наведения аналогично коррекции привода вертикального наведения осуществляют тогда, когда после очередного измерения будет выполнено соответствие измеренных параметров установленному уровню, что будет означать завершение коррекции привода горизонтального наведения,
сохраняют данные (например, тип образца вооружения, его бортовой номер, длительность работы стабилизатора вооружения, условия проведения коррекции, данные об измеренных колебаниях, данные о количестве выработанных сигналов управления и обратной связи) о проведенной коррекции в памяти (например, памяти электронно-вычислительной машины) для возможности дальнейшей, в том числе с учетом данных с других образцов вооружения, статистической обработки.
| "Разработка способов диагностирования стабилизаторов танкового вооружения, автоматической коррекции демпфирования приводов наведения стабилизатора вооружения" | |||
| Интернет-журнал "Науковедение", т | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Термосно-паровая кухня | 1921 |
|
SU72A1 |
| - М.: Военное издательство, 1992 | |||
| - С | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2015 |
|
RU2593931C1 |
| Приспособление к токарному станку для нарезания смазочных канавок на валиках и во втулках | 1926 |
|
SU5243A1 |

