Изобретение относится к области машиностроения, преимущественно к трубопроводной арматуре, а именно к кранам с поворотными пробками, имеющими сферическую поверхность.
Из сведений, общедоступных до даты приоритета заявленного технического решения, известно средство того же назначения - система автоматического управления положением седел шарового крана, содержащая блок управления, связанный с пневмогидравлическим приводом поворота шаровой пробки, механизм перемещения седел, размещенных во входном и выходном патрубках корпуса шарового крана, в котором в собранном состоянии образованы: камера прямого хода L, сообщенная с председловым штуцером и камера обратного хода N, сообщенная с постседловым штуцером, при этом каждое седло шарового крана выполнено в виде подпружиненного ступенчатого поршня, на примыкающей поверхности которого к пробке размещено герметизирующее кольцо, трехходовой кран ручного управления, соединенный со штуцерами, и аварийный ручной дублер привода (патент US 3776506, МПК (Int. Cl.) F16K 25020, 12/04/1973 г.).
Данное техническое решение является наиболее близким к изобретению по технической сущности и достигаемому результату, поэтому принято за прототип.
Недостатками прототипа являются невысокие эксплуатационные качества из-за перемещения и поворота пробки и седел отдельными ручными механизмами, что затрудняет автоматизацию управления положением седел.
Технический результат от использования заявленного технического решения заключается в улучшении эксплуатационных качеств за счет комплексного автоматического управления перемещением седел и поворотом пробки.
Ниже раскрыты все общие и частные существенные признаки изобретения, характеризующие их причинно-следственную связь с указанным техническим результатом, достаточные для осуществления специалистом в данной области техники:
Система автоматического управления положением седел шарового крана, содержит блок управления, связанный с пневмогидравлическим приводом поворота шаровой пробки, механизм перемещения седел, размещенных во входном и выходном патрубках корпуса шарового крана, в котором в собранном состоянии образованы: камера прямого хода L, сообщенная с председловым штуцером и камера обратного хода N, сообщенная с постседловым штуцером. Каждое седло шарового крана выполнено в виде подпружиненного ступенчатого поршня, на примыкающей поверхности которого к пробке размещено герметизирующее кольцо, трехходовой кран ручного управления, соединенный со штуцерами, и аварийный ручной дублер привода. Система включает в себя селективный клапан, связанный с входным и выходным патрубками, обратный клапан с подрывом поршневого типа, вход в корпусную полость обратного клапана соединен с выходным патрубком, указанного селективного клапана и с первым патрубком трехходового крана ручного управления. Корпусная полость обратного клапана соединена с председловыми штуцерами каждого седла. Выход корпусной полости обратного клапана соединен с атмосферой и закрыт запорным элементом. Запорный элемент обратного клапана установлен с возможностью перемещения его поршнем до упора во вход в корпусную полость обратного клапана при подаче рабочей среды в надпоршневую полость. Вход в корпусную полость обратного клапана герметично закрыт запорным элементом, а выход открыт и корпусная полость соединена с атмосферой. Надпоршневая полость соединена с постседловыми штуцерами каждого седла и со вторым патрубком трехходового крана ручного управления, третий патрубок которого через перекидной клапан соединен с полостями пневматического цилиндра пневмогидравлического привода, последние в свою очередь связаны через блок управления с атмосферой, либо с выходным патрубком селективного клапана. Трехходовой кран ручного управления конструктивно выполнен с возможностью обеспечения двух рабочих положений. Первое положение - «ручное управление закрыто», при котором линия первого патрубка перекрыта, а соединены между собой второй и третий патрубки. Второе положение - «ручное управление открыто», при котором линия третьего патрубка перекрыта, а соединены между собой первый и второй патрубки.
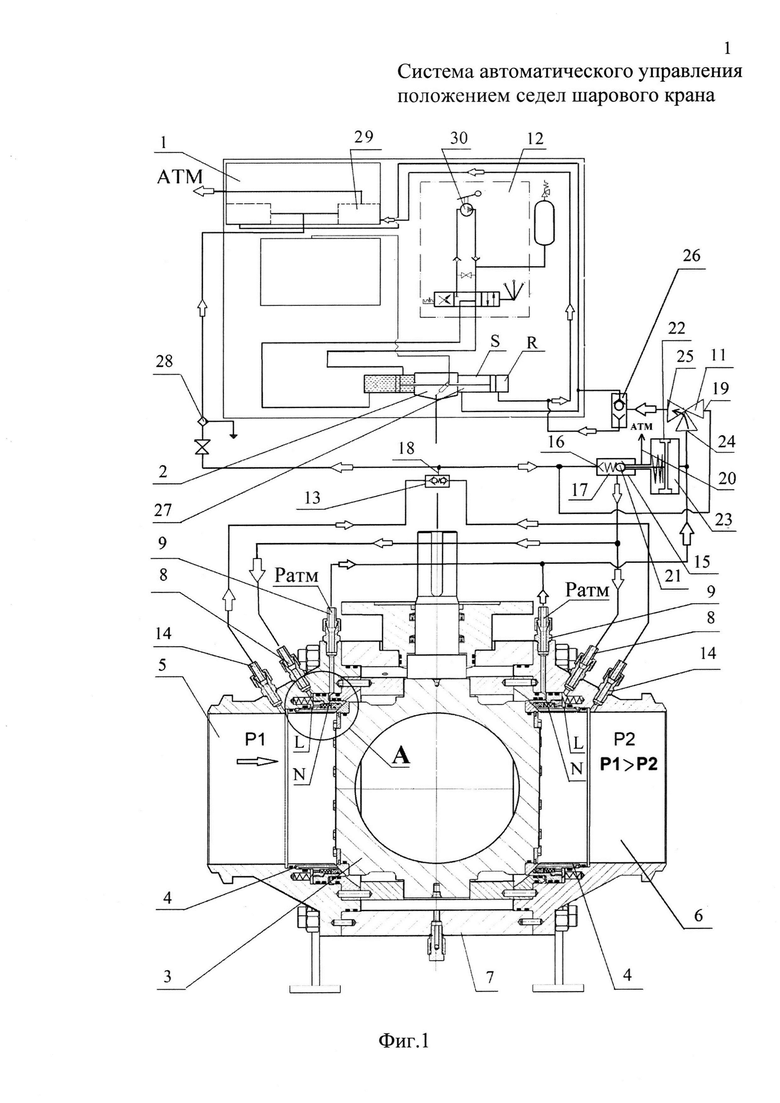
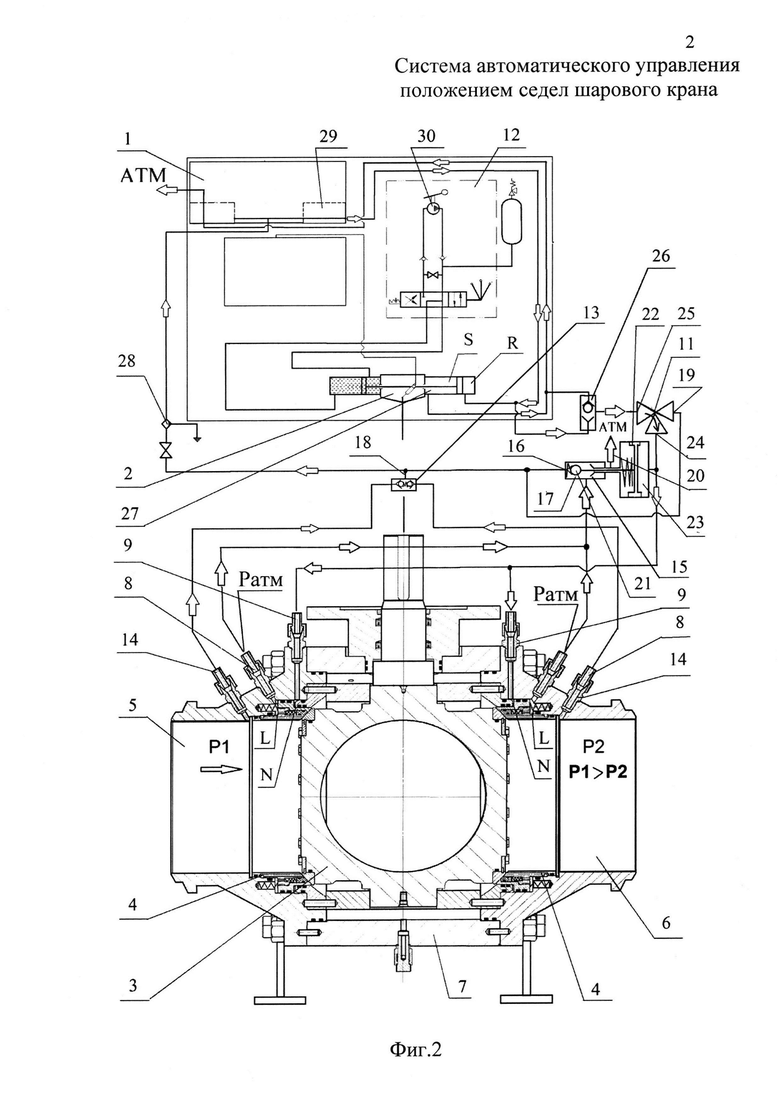
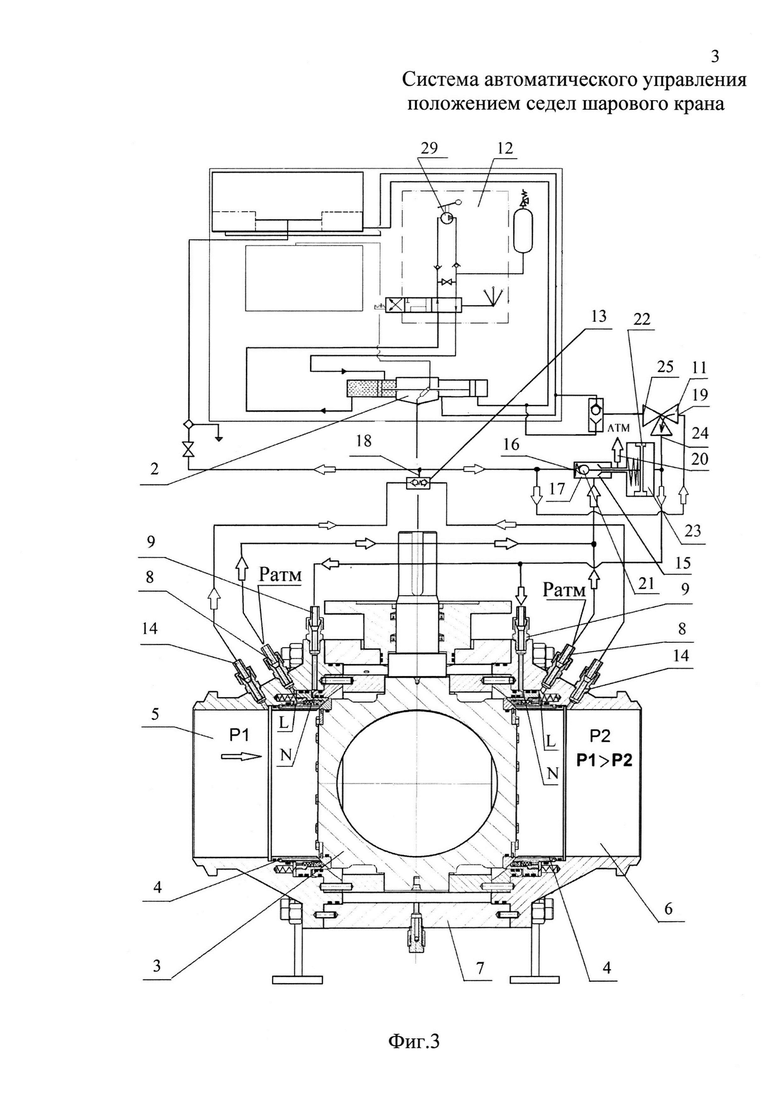
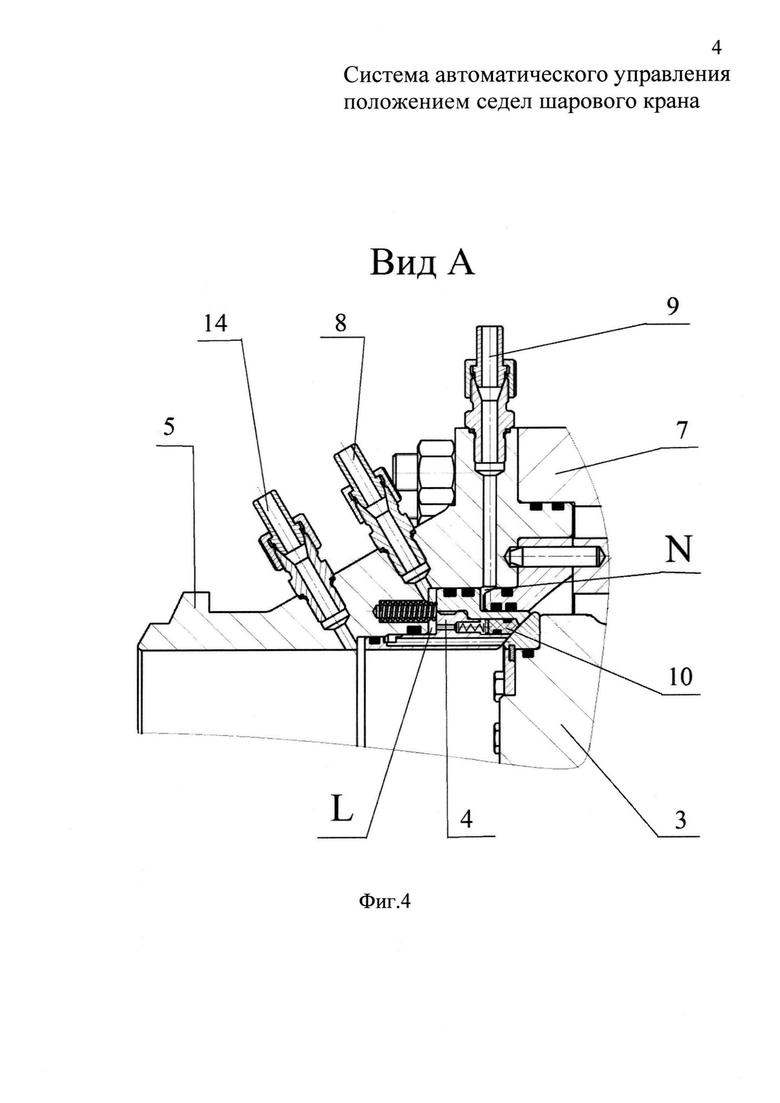
Устройство иллюстрируется чертежами, где: на фиг. 1 представлена система автоматического управления в рабочем положении «ручное управление закрыто», кран закрыт; на фиг. 2 представлена система автоматического управления в рабочем положении «ручное управление закрыто», кран открывается; на фиг. 3 представлена система автоматического управления в рабочем положении ручного управления автоматическим приводом; на фиг. 4 - вид А. на фиг. 1.
Система автоматического управления положением седел шарового крана содержит блок управления 1, связанный с пневмогидравлическим приводом 2 поворота шаровой пробки 3, механизм перемещения седел 4, размещенных во входном 5 и выходном 6 патрубках корпуса 7 шарового крана.
В корпусе 7 в собранном состоянии образованы: камера прямого хода L, сообщенная с председловым штуцером 8, и камера обратного хода N, сообщенная с постседловым штуцером 9.
Каждое седло 4 шарового крана выполнено в виде подпружиненного ступенчатого поршня, на примыкающей поверхности которого к пробке 3 размещено герметизирующее кольцо 10, трехходовой кран ручного управления 11, соединенный со штуцерами, и аварийный ручной дублер 12 привода 2.
Система включает в себя селективный клапан 13, связанный штуцерами 14 с входным 5 и выходным 6 патрубками и обратный клапан с подрывом 15 поршневого типа.
Вход 16 в корпусную полость 17 обратного клапана с продрывом 15 соединен с выходным патрубком 18 указанного селективного клапана 13 и с первым патрубком 19 трехходового крана ручного управления 11.
Корпусная полость 17 обратного клапана с продрывом 15 соединена с председловыми штуцерами 8 каждого седла 4.
Выход 20 корпусной полости 17 обратного клапана с продрывом 15 соединен с атмосферой и закрыт запорным элементом 21.
Запорный элемент 21 обратного клапана с продрывом 15 установлен с возможностью перемещения его поршнем 22 до упора во вход 16 в корпусную полость 17 обратного клапана с продрывом 15 при подаче рабочей среды в надпоршневую полость 23.
Вход 16 в корпусную полость 17 обратного клапана с продрывом 15 герметично закрыт запорным элементом 21, а выход 20 открыт и корпусная полость 17 соединена с атмосферой.
Надпоршневая полость 23 соединена с постседловыми штуцерами 9 каждого седла 4 и со вторым патрубком 24 трехходового крана ручного управления 11, третий патрубок 25 которого через перекидной клапан 26 соединен с полостями S и R цилиндра 27 пневмогидравлического привода 2, последние в свою очередь связаны через блок управления 1 с атмосферой, либо с выходным патрубком 18 селективного клапана.
Трехходовой кран ручного управления 11 конструктивно выполнен с возможностью обеспечения двух рабочих положений.
Первое положение - «ручное управление закрыто» (фиг. 1 и фиг. 2), при котором линия первого патрубка 19 перекрыта, а соединены между собой второй 24 и третий 25 патрубки.
Второе положение - «ручное управление открыто» (фиг. 3), при котором линия третьего патрубка 25 перекрыта, а соединены между собой первый 19 и второй 24 патрубки.
Патрубки 5 или 6 через выходной патрубок 18 селективного клапана 13, фильтр-осушитель 28 связаны с электромагнитными клапанами 29 блока управления 1.
Сравнение заявленного технического решения с уровнем техники известным из научно-технической и патентной документации на дату приоритета в основной и смежной рубриках не выявило средство, которому присущи признаки, идентичные всем признакам, содержащимся в предложенной заявителем формуле изобретения, включая характеристику назначения. Т.е., совокупность существенных признаков заявленного решения ранее не была известна и не тождественна каким-либо известным техническим решениям, следовательно, она соответствует условию патентоспособности "новизна".
Данное техническое решение промышленно применимо, поскольку в описании к заявке и названии изобретения указано его назначение, оно может быть осуществлено промышленным способом для запорно-регулирующих операций в трубопроводах, осуществимо и воспроизводимо, а отличительные признаки, приведенные в формуле изобретения устройства, позволяют получить заданный технический результат, т.е. являются существенными.
Изобретение в том виде, как оно охарактеризовано в каждом из пунктов формулы, может быть осуществлено с помощью средств и методов, описанных в патенте US 3776506, ставшим общедоступным до даты приоритета изобретения.
Следовательно, заявленное техническое решение соответствует условию патентоспособности "промышленная применимость".
Анализ известных технических решений в данной области техники показал, что предложенное техническое решение не следует для специалиста явным образом из уровня техники, поскольку не выявлены решения, имеющие признаки, совпадающие с его отличительными признаками, а в выявленных таких решениях не подтверждена известность влияния отличительных признаков на указанный в материалах заявки технический результат.
Т.е. заявленное решение имеет признаки, которые отсутствуют в известных технических решениях, а использование этих признаков в заявленной совокупности существенных признаков дает возможность получить новый технический результат - улучшение эксплуатационных качеств за счет комплексного автоматического управления перемещением седел и поворотом пробки.
Следовательно, предложенное техническое решение может быть получено только путем творческого подхода и неочевидно для среднего специалиста в этой области, т.е. имеет изобретательский уровень по сравнению с существующим уровнем техники.
Осуществление заявленной изобретения достигается реализацией указанного назначения.
Для подтверждения возможности осуществления изобретения ниже приводятся следующие сведения о работе устройства, раскрывающие, как может быть осуществлено изобретение с реализацией указанного заявителем назначения и с подтверждением возможности достижения технического результата при осуществлении изобретения.
На фиг. 1-фиг. 3 показана работа системы управления в разных режимах использования шарового крана, установленного в собранном виде в рабочей магистрали.
На фиг. 1 система автоматического управления положением седел шарового крана находится в режиме ожидания, при котором проход для рабочей среды перекрыт шаровой пробкой 3.
Давление рабочей среды во входном 5 и выходном 6 патрубках шарового крана может иметь разные значения.
Рабочая среда из патрубка 5 или 6 с более высоким давлением через выходной патрубок 18 селективного клапана 13, фильтр-осушитель 28 поступает на электромагнитные клапаны 29 блока управления 1.
В режиме ожидания электромагнитные клапаны 29 блока управления 1 закрыты и рабочая среда дальше не поступает.
Одновременно с этим рабочая среда из выходного патрубка селективного клапана 13 поступает на вход 16 обратного клапана с подрывом 15 поршневого типа, попадает в его корпусную полость 17 и из нее - через председловые штуцеры 8, установленные во входном 5 и выходном 6 патрубках шарового крана попадает в замкнутые полости L, расположенные перед седлом 4.
Выход 20 из корпусной полости 17 обратного клапана с подрывом 15 соединен с атмосферой и закрыт запорным элементом 21.
Полости N, расположенные после седла 4 через постседловые штуцера 9, соединены со вторым 24 патрубком трехходового крана 11 ручного управления.
Трехходовой кран ручного управления 11 находится в рабочем положении: «ручное управление закрыто», при котором линия первого патрубка 19 перекрыта, а соединены между собой второй 24 и третий 25 патрубки.
Третий 25 патрубок трехходового крана ручного управления 11 через перекидной клапан 26 соединен с полостями S и R цилиндра 27 пневмогидравлического привода 2, а полости, в свою очередь, связаны через блок управления 1 с атмосферой.
В результате этого на каждом ступенчатом поршне (седле 4) появляется перепад давлений: в полости L давление рабочей среды равно, например, Р1, а в полости N - равно атмосферному.
Под воздействием перепада давлений, а также под действием пружин седла 4 плотно прижаты к уплотнительной поверхности шаровой пробки 3.
Чем выше давление в трубопроводе, тем больше сила прижатия седел 4 к шаровой пробке 3.
В этом положении шаровой кран герметично закрыт.
Процесс работы системы при открытии крана показан на фиг.2.
При необходимости открыть шаровой кран, оператор подает электропитание на соответствующий электромагнитный клапан 29 блока управления 1.
Клапан при этом открывается.
Рабочая среда поступает в полость цилиндра 27 пневмогидравлического привода 2. из патрубка 5 или 6 шарового крана с более высоким давлением через выходной патрубок 18 селективного клапана 13, фильтр-осушитель 28, открытые электромагнитные клапаны 29 блока управления 1.
Полость S цилиндра 27 пневмогидравлического привода 2 связана через блок управления 1 с атмосферой.
Поступая в полость R, рабочая среда одновременно поступает через перекидной клапан 26 на третий 25 патрубок трехходового крана ручного управления 11.
Так как трехходовой кран ручного управления 11 находится в рабочем положении «ручное управление закрыто», при котором линия первого патрубка 19 перекрыта, а соединены между собой второй 24 и третий 25 патрубки, то рабочая среда из третьего 25 патрубка через второй 24 патрубок поступает в надпоршневую полость 23 обратного клапана с подрывом 15 и через постседловые штуцера 9, установленные во входном 5 и выходном 6 патрубках шарового крана, попадает в замкнутые полости N.
Рабочая среда, попадая в надпоршневую полость 23 обратного клапана с подрывом 15 воздействует на поршень 22.
Поршень 22, перемещая запорный элемент 21, открывает выход 20 из корпусной полости обратного клапана с подрывом 15, и соединяет ее с атмосферой.
При этом запорный элемент 21, перемещаясь дальше, закрывает вход 16 в корпусную полость 17 обратного клапана с подрывом 15 и перекрывает поступление рабочей среды в нее из выходного патрубка селективного клапана 13.
Так как замкнутые полости L, расположенные перед седлом 4, соединены с корпусной полостью 17 обратного клапана с подрывом 15, то в результате этого давление в замкнутых полостях L также становиться равным атмосферному.
На каждом ступенчатом поршне (седле 4) появляется обратный перепад давлений: в полости N давление рабочей среды равно, например, Р1, а в полости L равно атмосферному.
Под воздействием обратного перепада давлений, седла 4 перемещаются от шаровой пробки 3, преодолевая усилие пружин, между седлами 4 и пробкой 3 появляется зазор.
Шаровой кран открывается, при этом отсутствует трение между уплотнительными поверхностями седел 4 и пробки 3.
Закрытие крана происходит аналогично, но в этом случае оператор подает питание на другой электромагнитный клапан 29 блока управления 1, давление поступает в полость S цилиндра 27 пневмогидравлического привода 2, а полость R связана через блок управления 1 с атмосферой.
На фиг. 3 показана работа системы автоматического управления положением седел шарового крана при его открытии в ручном режиме, например, при отсутствии электропитания.
В этом режиме рабочая среда из патрубков 5 или 6 крана с более высоким давлением через выходной патрубок селективного клапана 13, фильтр-осушитель 28 поступает на электромагнитные клапаны 29 блока управления 1.
При отсутствии команды оператора или при отсутствии электропитания, электромагнитные клапаны 29 блока управления 1 закрыты и рабочая среда дальше не поступает.
При ручном управлении пневмогидравлическим приводом 2 трехходовой кран ручного управления 11 переводится в рабочем положении «ручное управление открыто», при котором линия третьего патрубка 25 перекрыта, а соединены между собой первый 19 и второй 24 патрубки.
В таком положении рабочая среда из первого 19 патрубка поступает во второй 24 патрубок и из него - в надпоршневую полость 23 обратного клапана с подрывом 15.
Далее через постседловые штуцера 9, установленные во входном 5 и выходном 6 патрубках шарового крана, рабочая среда попадает в замкнутые полости N, попадая в надпоршневую полость 23 обратного клапана с подрывом 15, и воздействует на поршень 22.
Поршень 22, перемещая запорный элемент 21, открывает выход из корпусной полости 17 обратного клапана с подрывом 15 и соединяет ее с атмосферой.
При этом запорный элемент 21, перемещаясь дальше, закрывает вход 16 в корпусную полость 17 и перекрывает поступление рабочей среды в нее из выходного патрубка селективного клапана 13.
Так как замкнутые полости L, расположенные перед седлом 4, соединены с корпусной полостью 17 обратного клапана с подрывом 15, то в результате этого давление в замкнутых полостях L также становиться равным атмосферному.
На каждом ступенчатом поршне (седле) 4 появляется обратный перепад давлений: в полости N, давление рабочей среды равно, например, Р1, а в полости L равно атмосферному.
Под воздействием обратного перепада давлений седла 4 перемещаются от шаровой пробки 3, преодолевая усилие пружин, между седлами 4 и пробкой 3 появляется зазор.
При работе насосом 30 ручного дублера 12 пневмогидавлического привода 2 шаровой кран открывается, при этом отсутствует трение между уплотнительными поверхностями седел 4 и пробки 3.
В изобретении упрощена конструкция механизмов управления, что позволяет автоматизировать действия, связанные с поворотом запорного органа и перемещением седел, и увеличить срок службы уплотнений шарового крана.
Устройство может быть использовано для перекрытия потока рабочей среды с содержанием твердых включений, транспортируемой по трубопроводам технологических систем в газовой, нефтяной отраслях промышленности.
Преимуществами изобретения являются:
- снижение стоимости крана также за счет уменьшения рабочих усилий для его управления, что позволяет использовать для шарового крана менее мощных и более дешевых приводов;
- минимальные изменения в конструкции для использования настоящего изобретения.
Использование изобретение позволяет улучить эксплуатационные качества за счет комплексного автоматического управления перемещением седел и поворотом пробки, а также повысить надежность за счет единого автоматического управления отводом и поджатием седел к запорному органу и поворотом пробки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран | 2016 |
|
RU2644315C1 |
| СПОСОБ ПОСТРОЕНИЯ ПРИВОДА И ПРИВОД (ВАРИАНТЫ) | 2004 |
|
RU2289053C2 |
| КРАН СФЕРИЧЕСКИЙ С РАЗДЕЛИТЕЛЕМ СРЕД | 2019 |
|
RU2720907C1 |
| Пневматическая система управления для шарового крана | 1980 |
|
SU934125A1 |
| ТРЕХХОДОВОЙ ШАРОВОЙ КРАН С ВЕРХНИМ РАЗЪЕМОМ | 2005 |
|
RU2282087C1 |
| Обратный клапан управления сёдлами шарового крана | 2018 |
|
RU2673636C1 |
| Шаровой кран-регулятор давления | 2023 |
|
RU2799157C1 |
| ШАРОВОЙ КРАН | 2013 |
|
RU2521701C1 |
| УПЛОТНИТЕЛЬНЫЙ УЗЕЛ ЗАПОРНОГО ОРГАНА ШАРОВОГО КРАНА | 2016 |
|
RU2615239C1 |
| КЛАПАН ПЕРЕПУСКНОЙ С БЛОКОМ УПРАВЛЕНИЯ | 2004 |
|
RU2276303C1 |
Система содержит блок управления, связанный с пневмогидравлическим приводом поворота шаровой пробки. Аварийный дублер с ручным насосом. В зоне седел шарового крана, выполненного в виде ступенчатого поршня, образованы две полости с соответствующим председловым и постседловым штуцерами. В системе дополнительно установлен обратный клапан с подрывом поршневого типа, вход которого соединен с выходным патрубком селективного клапана и с первым патрубком трехходового крана ручного управления. Корпусная полость обратного клапана соединена с председловыми штуцерами каждого седла. Выход корпусной полости обратного клапана соединен с атмосферой и закрыт запорным элементом. Надпоршневая полость клапана соединена со всеми постседловыми и со вторым патрубком трехходового крана ручного управления, третий патрубок которого соединен с полостями цилиндра пневмогидравлического привода, последние связаны через блок управления с атмосферой, либо с выходным патрубком селективного клапана. Трехходовой кран устанавливает два рабочих положения: первое положение - «ручное управление закрыто», при котором линия первого патрубка перекрыта, а соединены между собой второй и третий патрубки, и второе положение - «ручное управление открыто», при котором линия третьего патрубка перекрыта, а соединены между собой первый и второй патрубки. 4 ил.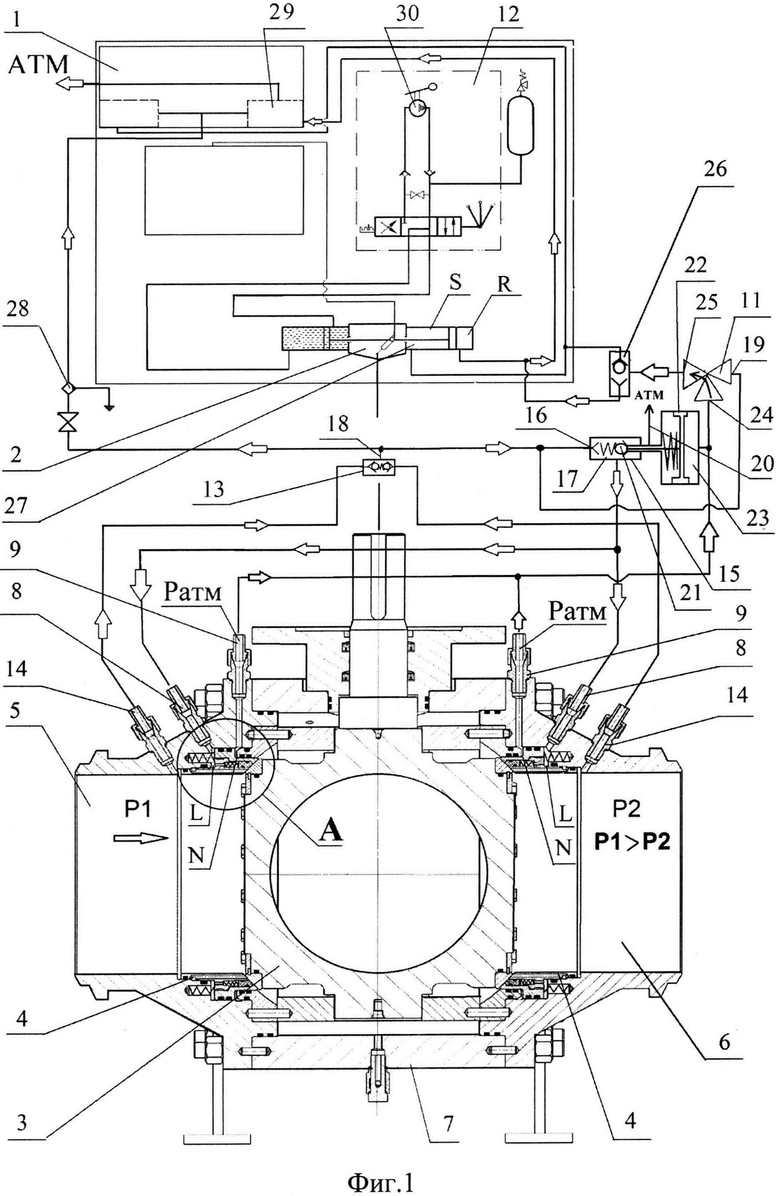
Система автоматического управления положением седел шарового крана, содержащая блок управления, связанный с пневмогидравлическим приводом поворота шаровой пробки, механизм перемещения седел, размещенных во входном и выходном патрубках корпуса шарового крана, в котором в собранном состоянии образованы: камера прямого хода L, сообщенная с председловым штуцером, и камера обратного хода N, сообщенная с постседловым штуцером, при этом каждое седло шарового крана выполнено в виде подпружиненного ступенчатого поршня, на примыкающей поверхности которого к пробке размещено герметизирующее кольцо, трехходовой кран ручного управления, соединенный со штуцерами, и аварийный ручной дублер привода, отличающаяся тем, что система включает в себя селективный клапан, связанный с входным и выходным патрубками, обратный клапан с подрывом поршневого типа, вход в корпусную полость обратного клапана соединен с выходным патрубком указанного селективного клапана и с первым патрубком трехходового крана ручного управления, корпусная полость обратного клапана соединена с председловыми штуцерами каждого седла, выход корпусной полости обратного клапана соединен с атмосферой и закрыт запорным элементом, причем запорный элемент обратного клапана установлен с возможностью перемещения его поршнем до упора во вход в корпусную полость обратного клапана при подаче рабочей среды в надпоршневую полость, при этом вход в корпусную полость обратного клапана герметично закрыт запорным элементом, а выход открыт и корпусная полость соединена с атмосферой, надпоршневая полость соединена с постседловыми штуцерами каждого седла и со вторым патрубком трехходового крана ручного управления, третий патрубок которого через перекидной клапан соединен с полостями пневматического цилиндра пневмогидравлического привода, последние в свою очередь связаны через блок управления с атмосферой, либо с выходным патрубком селективного клапана, при этом трехходовой кран ручного управления конструктивно выполнен с возможностью обеспечения двух рабочих положений: первое положение - «ручное управление закрыто», при котором линия первого патрубка перекрыта, а соединены между собой второй и третий патрубки, и второе положение - «ручное управление открыто», при котором линия третьего патрубка перекрыта, а соединены между собой первый и второй патрубки.
| US 3776506 A1, 04.12.1973 | |||
| US 1946319 A1, 06.02.1934 | |||
| ЗАПОРНАЯ АРМАТУРА С ПОДВИЖНЫМИ ЭЛЕМЕНТАМИ СЕДЕЛ | 2007 |
|
RU2355933C1 |
| 0 |
|
SU155805A1 | |
| Шаровой кран | 1978 |
|
SU709882A1 |
| US 3765647 A1, 16.10.1973. | |||

