Область техники, к которой относится изобретение
Настоящее изобретение относится к механизму с упрощенным обращением для регулирования устройства, предназначенного для герметичного соединения двух замкнутых пространств, и к устройству для герметичного соединения двух замкнутых пространств, содержащему, по меньшей мере, один такой механизм.
В ряде определенных отраслей промышленности, к которым, в частности, относятся ядерная, медицинская, фармацевтическая и сельскохозяйственная отрасли, необходимо или желательно решать определенные задачи в замкнутой атмосфере с целью защиты персонала, например, от радиоактивности, токсичности и т.д., или, наоборот, решать эти задачи в стерильной или незапыленной атмосфере или, в конечном счете, обе эти задачи одновременно.
Перемещение устройства или продукта из одного замкнутого пространства в другое без уплотнения каждого из этих пространств в любой момент времени, принимая во внимание нарушение внешней среды, создает проблему, подлежащую решению. Эта проблема может быть решена с помощью двухдверного соединительного устройства.
Такое двухдверное устройство известно, к примеру, из FR 2695343. Каждое пространство закрыто дверцей, установленной во фланце. Каждая дверца крепится к соответствующему фланцу с помощью байонетного соединения, и два фланца предназначены для крепления друг к другу с помощью байонетного соединения.
В случае, когда одно из замкнутых пространств образовано контейнером, и другое пространство образовано перчаточным боксом, перенос выполняется следующим образом. Фланец контейнера содержит на его наружной периферии выступы, предназначенные для взаимодействия с углублением фланца перчаточного бокса. Фланец контейнера входит во фланец перчаточного бокса, при этом контейнер ориентирован таким образом, чтобы выступы соответствовали углублению. Первое вращение контейнера вдоль оси его дверцы обеспечивает крепление фланца контейнера к фланцу перчаточного бокса с помощью байонетного соединения. Посредством второго вращения контейнера вдоль той же оси непосредственно после первого вращения дверца контейнера поворачивается относительно контейнера, обеспечивая как крепление с помощью другого байонетного соединения с дверцей контейнера, так и отсоединение нового узла, образованного двумя примыкающими дверцами, относительно фланцев дверцы и перчаточного бокса. Рукоятка управления, расположенная в перчаточном боксе, позволяет разблокировать защитный механизм и освободить проход между двумя пространствами. В случае стерильной атмосферы, когда наружные поверхности двух дверец находятся в герметичном контакте, они не могут загрязнять внутренние стороны пространств.
Это устройство полностью удовлетворяет требованиям в случае перемещения твердых продуктов с ограниченной массой. Однако требуется вращение контейнера для совмещения фланцев и их крепления. В случае контейнера большого размера обращение с устройством при вращении может стать затруднительным. В случае, когда устройство для соединения является вертикальным, не всегда можно легко повернуть контейнер. Кроме того, если перемещаемый продукт является порошком, наличие выступов для соединения может сделать очистку более трудоемкой.
Сущность изобретения
Задача настоящего изобретения заключается в том, чтобы предложить механизм для регулирования устройства для герметичного соединения двух замкнутых пространств, например, контейнера и кожуха, обеспечивая более легкое соединение двух пространств без вращения двух пространств.
Дополнительная задача настоящего изобретения состоит в том, чтобы предложить проход упрощенной формы между двумя пространствами, обеспечивающий более легкую очистку.
Вышеуказанная задача решается с помощью механизма для регулирования устройства для соединения, расположенного в одном из пространств и предназначенного для обеспечения примыкания дверцы другого пространства и обеспечения во время приведения в действие герметичного соединения двух дверец и их последующего разблокирования по отношению к фланцам с целью образования герметичного прохода между двумя пространствами.
Другими словами, механизм управления требует только приведения в контакт двух фланцев, при этом он содержит стыковочную головку, в одном из пространств, автоматической стыковки с дверцей другого пространства независимо от ориентации, крепления к дверце и отсоединения от нее.
Механизм по изобретению имеет преимущество, состоящее в том, что не требуется никакой угловой ориентации двух пространств относительно друг друга, что упрощает маневрирование. Кроме того, обеспечивается автоматизация маневрирования, поскольку перемещения при вращении сосредоточены на одной из дверец.
Соответственно выбранному количеству выступов, которое, по меньшей мере, равно двум, возможны несколько вариантов изготовления. В этом случае, соответственно угловому позиционированию стыковочной головки во время вхождения в контакт двух пространств, необходимо вращение, которое может доходить до 180°, для обеспечения выравнивания выступов. Если выбирается больше количество выступов, максимальный угол вращения пропорционально уменьшается. По существу, для четырех выступов угол вращения, необходимый для обеспечения выравнивания выступов, составляет максимум только 90°. Таким образом, уменьшается трение. Внедрение большего количества выступов также имеет преимущество для обеспечения повышенного механического сопротивления и улучшенного распределения усилий при контакте двух дверец.
Преимущественно, стыковочный механизм приводится в действие электродвигателем, обеспечивая получение герметичного соединения.
Предметом настоящего изобретения является механизм для регулирования устройства для герметичного соединения первого и второго замкнутых пространств, при этом первое пространство содержит первый фланец, ограничивающий первое отверстие, и первую дверцу, закрывающую вышеуказанное первое отверстие, второе пространство содержит второй фланец, ограничивающий второй отверстие, и вторую дверцу, закрывающую вышеуказанное второе отверстие, вторая дверца крепится ко второму фланцу с помощью байонетного соединения, первая дверца содержит кольцевую часть, обеспечивающую герметичный контакт с первым фланцем и второй дверцей, и корпус, при этом корпус и кольцевая часть ограничивают со второй дверцей герметизируемое пространство, вышеуказанный механизм управления установлен в кольцевой части, вышеуказанный механизм управления содержит охватываемый элемент, сконфигурированный для взаимодействия с охватывающим элементом, расположенным на второй дверце с помощью байонетного соединения, вышеуказанный механизм управления содержит средство для приведения во вращение вышеуказанного охватываемого элемента, вышеуказанный охватываемый элемент поступательно перемещается вдоль продольной оси и поворотно перемещается вокруг продольной оси для обеспечения соединения между двумя пространствами соответственно, по меньшей мере, следующим этапам:
- первому этапу вращения для поиска стыковочного положения охватываемого элемента на охватывающем элементе,
- второму этапу поступательного перемещения, во время которого охватываемый элемент примыкает к охватывающему элементу,
- третьему этапу вращения для обеспечения осевого запирания двух дверец,
- четвертому этапу вращения для обеспечения разблокирования второй дверцы относительно второго фланца.
По дополнительной характеристике охватываемый элемент содержит участок осевого запирания и участок управления, и вышеуказанные участки поворотно перемещаются относительно друг друга вокруг продольной оси, при этом участок осевого запирания предназначен для осевого запирания первой дверцы и второй дверцы, и участок управления предназначен для запирания или разблокирования второй крышки.
Например, участок осевого запирания может содержать кронштейн, перпендикулярный продольной оси и соединенный со средством для приведения во вращение вокруг продольной оси, при этом вышеуказанный кронштейн предназначен для взаимодействия с углублением второй дверцы с целью обеспечения осевого запирания первой и второй дверец, и участок управления содержит первую плиту и вторую плиту, по существу, круглой формы, снабженные выступами, при этом вышеуказанные плиты параллельны и находятся на фиксированном расстоянии друг от друга вдоль продольной оси, что обеспечивает возможность поворачивания кронштейна, и вышеуказанные выступы предназначены для взаимодействия с вырезами углубления таким образом, что вращение участка управления приводит во вращение вторую дверцу, при этом первая плита и вторая плита соединены со средством для приведения во вращение.
В преимущественном варианте выполнения средства для приведения во вращение входят в зацепление с приводным валом, соединенным с кронштейном, при этом вышеуказанные первая и вторая плиты крепятся к полому валу с проходящим через него приводным валом участка запирания, и механизм регулирования содержит утапливаемое средство для крепления при вращении, соединяющее кронштейн и первую и вторую плиты таким образом, что во время первого этапа первая и вторая плиты и кронштейн вращаются совместно, во время третьего этапа кронштейн поворачивается, и первая и вторая плиты неподвижны, и во время четвертого этапа первая и вторая плиты и кронштейн вращаются совместно.
Приводной вал, прикрепленный к кронштейну, более предпочтительно поступательно перемещается вдоль продольной оси, и второе упругое средство установлено в сжатом состоянии между первой плитой и фиксированным участком механизма управления таким образом, чтобы перемещать назад первую плиту и кронштейн в направлении второй дверцы.
Средства для крепления при вращении содержат, например, по меньшей мере, один штифт, имеющий участок малого диаметра и участок большого диаметра и установленный с возможностью скольжения через первую и вторую плиты и кронштейн, при этом первая плита имеет отверстие, диаметр которого обеспечивает размещение участка большого диаметра, и вторая плита имеет отверстие, диаметр которого обеспечивает размещение участка малого диаметра и меньше диаметра участка большого диаметра, и кронштейн содержит паз в форме дуги окружности, сцентрированной по продольной оси, при этом ширина паза позволяет размещать в нем участок малого диаметра штифта, и ширина паза меньше диаметра участка большого диаметра; паз содержит конец большого диаметра, позволяющий размещать участок большого диаметра, и упругое средство прикладывает усилие к штифту в направлении второй дверцы, и в закрепленном состоянии штифт проходит через два отверстия первой и второй плит и конец большой ширины паза кронштейна.
Механизм регулирования преимущественно может содержать средство для обнаружения положения охватываемого элемента снаружи углубления второй дверцы и положения в углублении второй дверцы.
Более предпочтительно, вращение во время первого этапа имеет направление, противоположное вращению на третьем этапе.
В варианте выполнения средство приведения в движение образовано электродвигателем. В другом варианте выполнения средство приведения в движение образовано ручным рычагом.
Другим предметом настоящего изобретения является устройство для герметичного соединения двух замкнутых пространств, содержащее в первом пространстве первый фланец, ограничивающий первое отверстие, и первую дверцу, закрывающую вышеуказанное первое отверстие, содержащее во втором пространстве второй фланец, ограничивающий второй отверстие, и вторую дверцу, закрывающую вышеуказанное второе отверстие, при этом вторая дверца крепится ко второму фланцу с помощью байонетного соединения, и механизм управления по изобретению, при этом первая дверца содержит кольцевую часть, обеспечивающую герметичный контакт с первым фланцем и со второй дверцей, и корпус, при этом корпус и кольцевая часть ограничивают со второй дверцей герметизированное пространство, и вышеуказанный механизм управления установлен в кольцевой части.
Устройство также может содержать средство для прикладывания осевого усилия к первой дверце в направлении первого фланца. Устройство также может содержать средство для прикладывания осевого усилия ко второму фланцу в направлении первого фланца.
В варианте выполнения первая дверца шарнирно соединена со стенкой первого пространства с помощью шарнира.
Другим предметом настоящего изобретения является система для перемещения порошка, содержащая устройство для соединения по настоящему изобретению, при этом первое пространство является кожухом, содержащим верхнюю стенку, через которую герметично проходит бункер, обеспечивающий подачу порошкообразного материала, нижнюю стенку, снабженную первым фланцем и первой дверцей в закрытом положении, при этом второе пространство образовано контейнером, подлежащим заполнению, который снабжен вторым фланцем и второй дверцей в закрытом положении, и средство для обеспечения контакта посредством перемещения вдоль продольной оси первого и второго фланцев, и средство для препятствования осевому перемещению второго фланца относительно первого фланца, и подвижный участок бункера, расположенный в камере, который может соединяться с концом бункера, открытым в камеру, и отверстием контейнера.
Перемещение подвижного участка бункера преимущественно обеспечивается посредством приведения в действие электродвигателя. Смещение двух дверец, соединенных друг с другом, также может преимущественно обеспечиваться посредством приведения в действие электродвигателя.
Другим предметом настоящего изобретения является способ герметичного соединения первого и второго замкнутых пространств с помощью механизма управления по настоящему изобретению; вышеуказанный способ содержит следующие этапы:
a) приведение в контакт первого фланца и второго фланца,
b) приведение во вращение охватываемого элемента до тех пор, пока он поступательно не переместится в углубление второй дверцы,
c) приведение во вращение охватываемого элемента для осевого запирания первой и второй дверец,
d) приведение во вращение охватываемого элемента для разблокирования второй дверцы и второго фланца,
e) отведение узла, образованного первой и второй дверцами.
Более предпочтительно, чтобы этап b) выполнялся после подтверждения выполнения этапа а), этап с) выполнялся после подтверждения выполнения этапа b), и этап d) выполнялся после подтверждения выполнения этапа с).
Направление вращения на этапе b) преимущественно должно быть противоположным по отношению к этапу d).
Краткое описание чертежей
Настоящее изобретение станет более понятым после изучения приведенного ниже описания со ссылкой на приложенные чертежи, на которых:
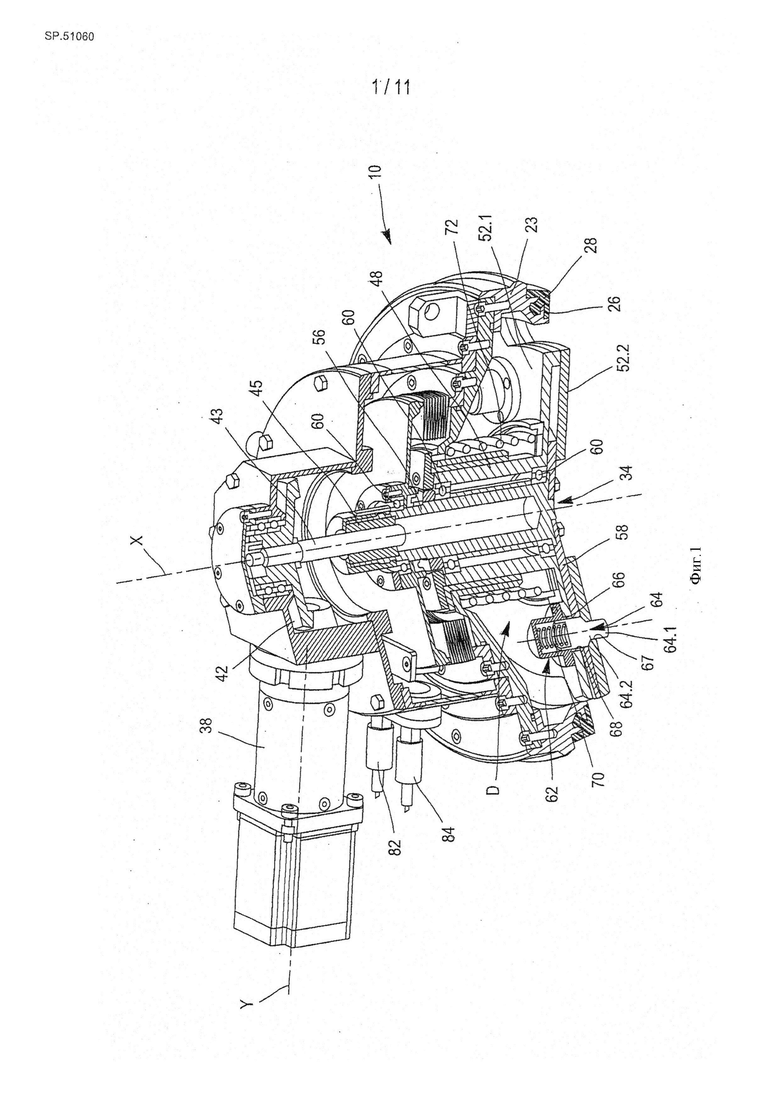
Фиг. 1 - вид в продольном разрезе по двум секущим плоскостям по варианту выполнения механизма управления по настоящему изобретению;
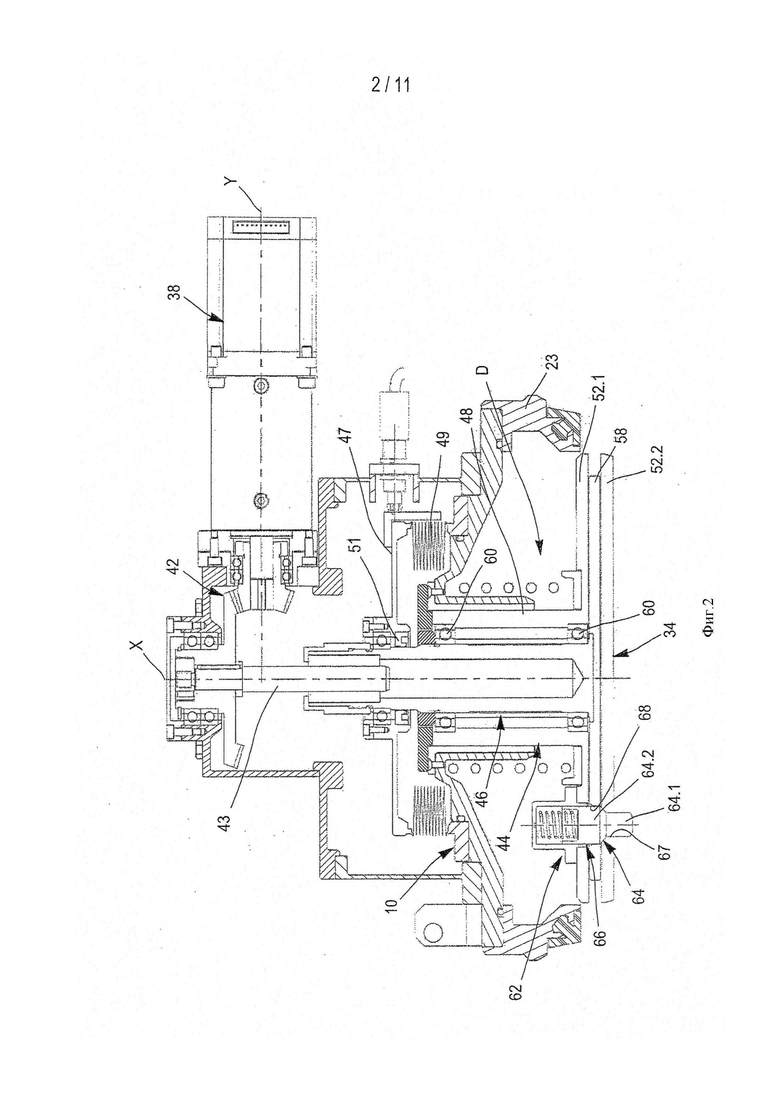
Фиг. 2 - вид в продольном разрезе по плоскости механизма управления из Фиг.1;
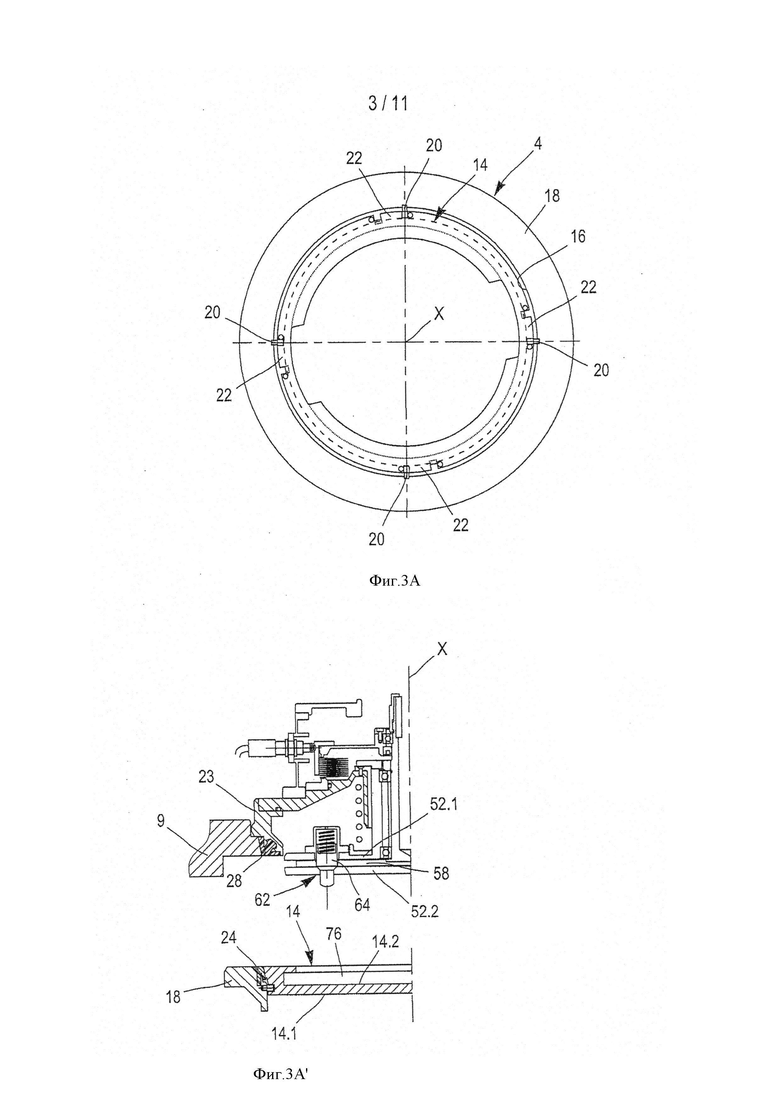
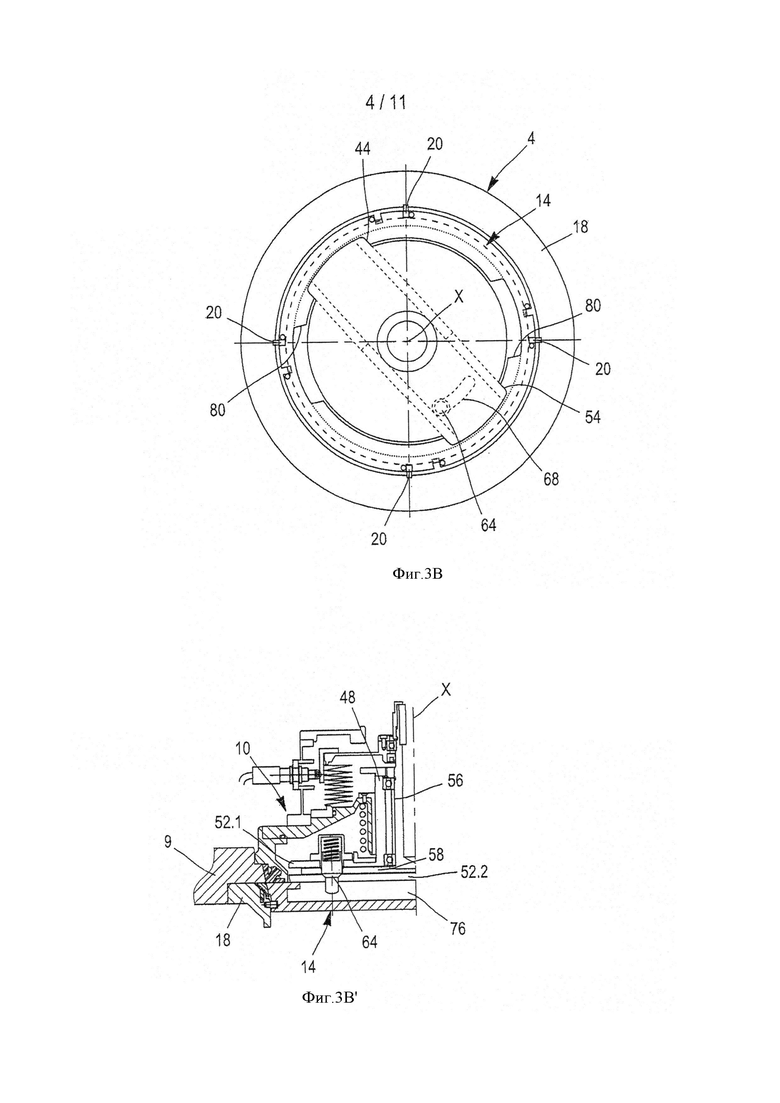
Фиг. 3А-3F - виды сверху на контейнер с участком механизма управления на различных этапах приведения двух пространств во взаимодействие в варианте выполнения с двумя выступами;
Фиг. 3А'-3F' - половины продольных разрезов устройства для соединения на различных этапах из Фиг. 3А-3F, соответственно;
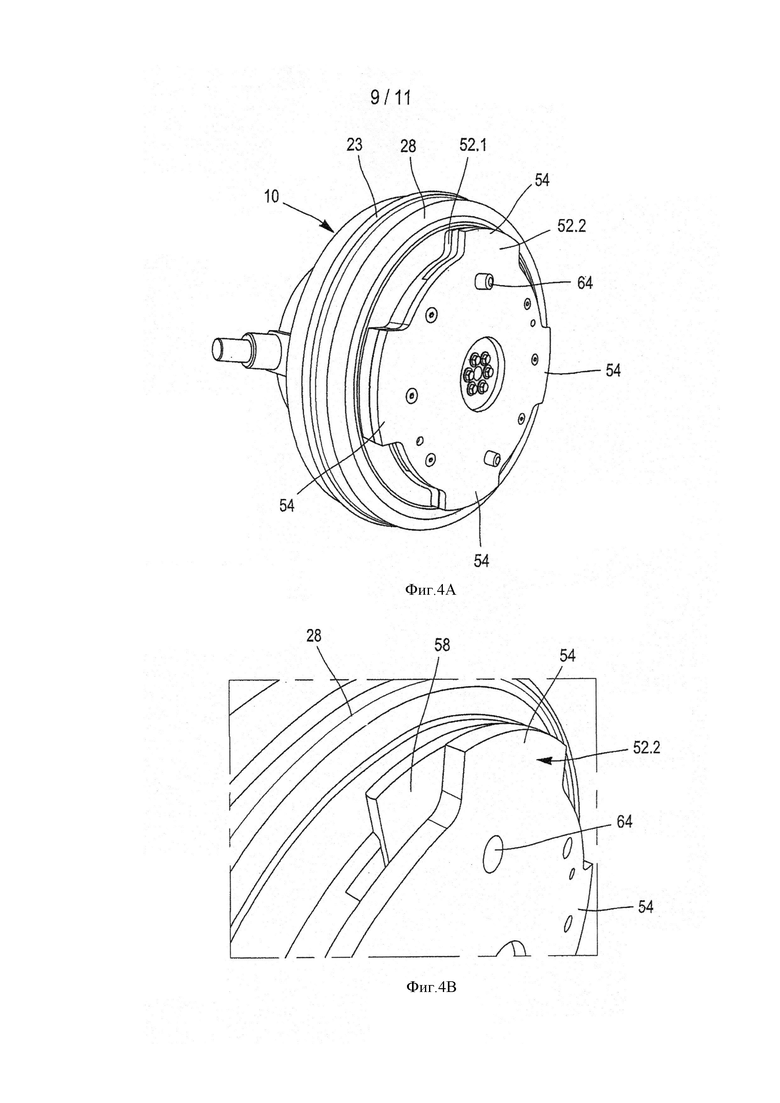
Фиг. 4А и 4В - виды снизу механизма управления из Фиг.1 и дверцы, содержащий механизм, в варианте выполнения с 4 выступами,
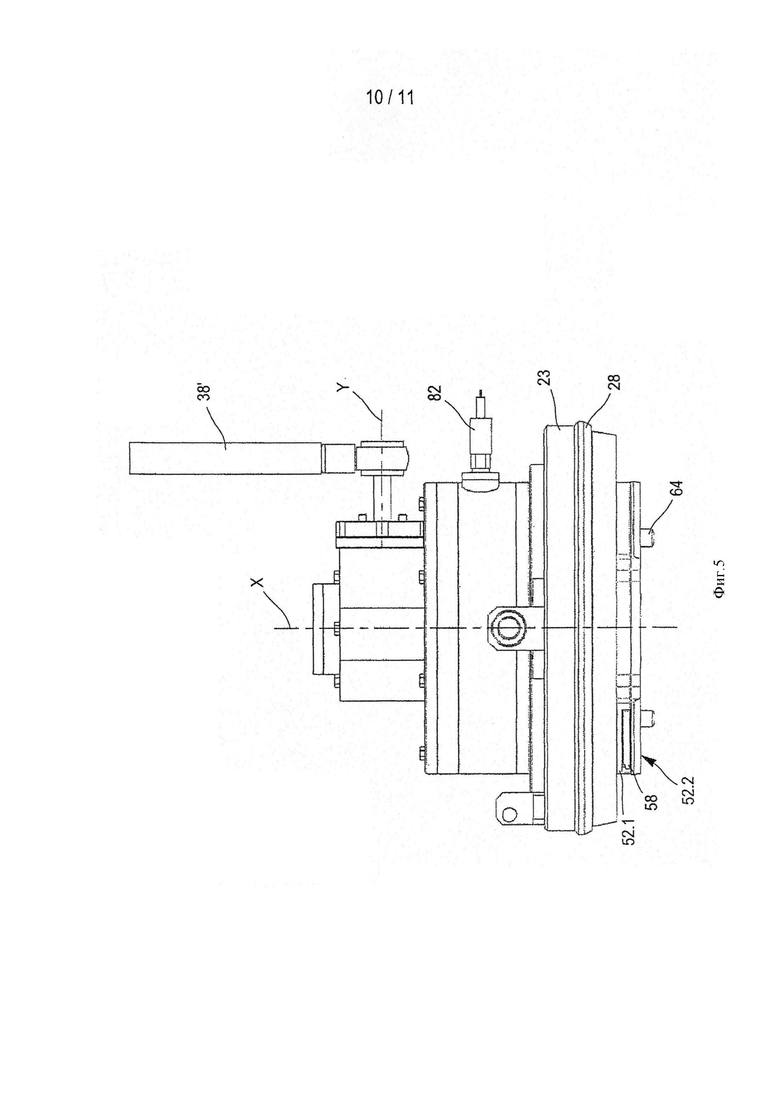
Фиг. 5 - вид сбоку на альтернативное устройство из Фиг. 1;
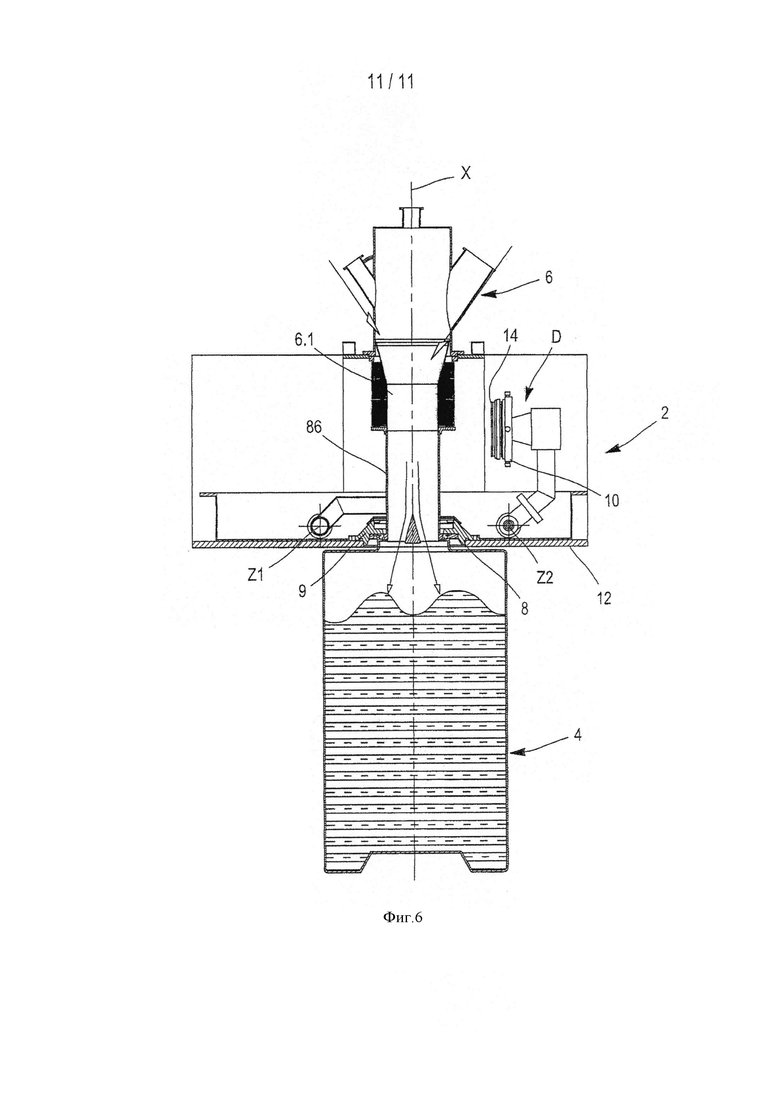
Фиг. 6 - схематичный вид установки для перемещения порошка, в которое внедрено устройство для соединения по изобретению.
Подробное описание конкретных вариантов выполнения
В приведенном ниже описании будут рассмотрены первое замкнутое пространство, образованное кожухом 2, и второе замкнутое пространство, образованное контейнером 4. Кожух может быть образован перчаточным боксом или камерой.
Термины «перчаточный бокс», «камера», «кожух» и «контейнер», используемые для обозначения двух замкнутых пространств, не являются ограничительными, поскольку изобретение относится, в общем, к обеспечению сообщения между двумя пространствами независимо от этих двух пространств. К примеру, изобретение может обеспечивать соединение между двумя перчаточными боксами или между двумя камерами.
На Фиг.6 показана установка для перемещения порошка, в которой используется механизм управления по изобретению.
Установка содержит кожух 2, расположенный под бункером 6, который герметично проходит через верхнюю стенку кожуха 2 и отверстие 8 в нижней стенке 12.
Отверстие 8 ограничивается фланцем 9 и закрывается дверцей 10. Механизм D управления по изобретению расположен в кожухе 2.
Контейнер 4 расположен под кожухом 2 и снабжен дверцей 14.
На Фиг. 3А показан вид сверху на контейнер 4 и, в частности, на дверцу 14. Контейнер содержит отверстие 16, ограничиваемое фланцем 18, в котором размещается дверца 14, которая герметично закрывает отверстие 16.
Устройство для соединения образовано дверцей 10 и фланцем 9 кожуха и дверцей 14 и фланцем 18 контейнера (Фиг. 3А').
Дверца 14 крепится к фланцу 18 с помощью байонетного соединения. В показанном варианте выполнения фланец 18 содержит четыре пальца 20, которые расположены радиально внутрь фланца 18 равномерно по окружности, и дверца 14 содержит на наружной кромке канавки 22, которые соответствуют каждому пальцу и в которых эти пальцы размещаются в запертом состоянии. Как вариант, пальцы могут быть установлены в дверце 14, и канавки 22 могут быть выполнены во фланце 18 контейнера 4. Это, к примеру, позволяет полностью освобождать проход, что создает особое преимущество в случае перемещения порошка или других элементов, которые могут удерживаться выступающими пальцами.
Дверца 14 содержит внутреннюю поверхность 14.1, которая располагается внутри контейнера, и наружную поверхность 14.2, которая располагается снаружи контейнера (Фиг. 3А').
Использование пальцев 20 обеспечивает очень небольшую поверхность, задерживающую порошок, который поступает из бункера.
Между краем фланца 18 и краем дверцы 14 контейнера установлено уплотнение 24.
На Фиг. 1 и 2 детально показан механизм D управления. Механизм D расположен в дверце 10 кожуха. Дверца 10 образована корпусом, который в показанном примере, по существу, имеет форму «шляпы», в которой установлен механизм D управления. Корпус содержит кольцевую часть 23, имеющую кольцевую сторону 26, предназначенную для контакта с фланцем 18 и дверцей 14 контейнера. Кольцевая часть 23 в закрытом положении расположена во фланце 9, как показано на Фиг. 3А'. Боковая периферия фланца 9 и боковая поверхность кольцевой части 23 обеспечивают, что дверца 10 опирается на фланец 9. Уплотнение 28 образует наружный конец кольцевой стороны 26 и нижний край боковой периферии кольцевой части 23. Уплотнение 28, по существу, контактирует с краем наружной поверхности 14.2 дверцы 14 контейнера и с боковой периферией фланца 9. Это уплотнение 28 образует уплотнение между нижней стенкой камеры и дверцей 10 и между двумя дверцами 10 и 14.
Средства для уплотнения, которые будут описаны ниже, ограничивают с помощью кольцевой части 23 герметизированное пространство применительно к внутренней стороне кожуха.
Предусмотрены непоказанные на чертежах средства для удерживания дверцы 10 впритык к фланцу 9 посредством прикладывания осевого усилия к дверце в направлении фланца 9. Для удаления дверцы 10 эти усилия сбрасываются. К примеру, эти средства могут быть образованы с помощью цилиндра.
Более предпочтительно дверца 10 шарнирно поворачивается вокруг горизонтальной оси с помощью шарнира.
Преимущественно для автоматического открывания дверец 10 и 14 предусматривается использование электродвигателя.
Автоматическое открывание в этом примерном варианте выполнения представляет особый интерес, поскольку должны быть подняты две дверцы, что может потребовать прикладывания определенных физических усилий. В случае вертикального устройства для соединения масса двух дверец воспринимается шарниром, и ручное открывание становится более легким.
Устройство для соединения имеет продольную ось X, вокруг которой поворачиваются дверцы 10 и 14. Продольная ось X образует ось вращения механизма управления (Фиг. 2).
Механизм D управления обеспечивает обращение с дверцей 14. Устройство D содержит охватываемый элемент 34, предназначенный для взаимодействия с углублением, образованным в наружной поверхности дверцы 14, что будет описано ниже.
Поворотно установленный охватываемый элемент 34 перемещается вокруг продольной оси X и поступательно вдоль продольной оси X. Охватываемый элемент может перемещаться поворотно и поступательно относительно кольцевой части 23. Для приведения во вращение предусматривается средство 38. В варианте выполнения, показанном на Фиг.1, этим средством является электродвигатель. В показанном варианте выполнения ось Y электродвигателя перпендикулярна оси вращения охватываемого элемента с целью ограничения помех, и между осью электродвигателя и валом 43 соединенным с охватываемым элементом, предусмотрена угловая передача 42. Весьма предпочтительно электродвигатель должен быть шаговым электродвигателем, поскольку в этом случае в любой момент можно определить, на какой ступени соединения находится механизм.
Охватываемый элемент 34 содержит наружный участок 44, предназначенный для приведения во вращение крышки 14 контейнера и именуемый далее как «участок управления», и внутренний участок 46, предназначенный для осевого крепления дверцы 10 к дверце 14 и именуемый далее как «участок осевого запирания».
Участок 44 управления содержит полый вал 48 и две плиты 52.1, 52.2, перпендикулярные валу 48 и жестко к нему прикрепленные. Плиты 52.1, 52.2 снабжены выступами, продолжающимися радиально наружу. В показанном варианте выполнения предусмотрены четыре выступа 54, которые расположены под прямыми углами друг к другу. Эти выступы предназначены для прохода в углубление, образованное в наружной поверхности дверцы 14.
Участок 46 осевого запирания содержит полый вал 56, расположенный внутри полого вала 48 участка 44 управления и находящийся в зацеплении с валом 43 электродвигателя. Участок 46 осевого запирания также содержит кронштейн 58, перпендикулярный валу 56 и установленный между двумя плитами участка 44 управления. Участок 46 осевого запирания может скользить вокруг вала 43 вдоль продольной оси. Соединение во время вращения между валом 43 и валом 56 обеспечивается, к примеру, с помощью шлицов, при этом вал 43 снабжен осевыми канавками, и вал 48 содержит на внутренней периферии осевые ребра, взаимодействующие с канавками.
Полый вал 56 установлен в полом валу 48 на шарикоподшипниках 60.
Участок 46 осевого запирания может поворачиваться относительно участка 44 управления. Втулка 45, образующая прокладку между валом 48 участка 44 управления и корпусом, предназначена для уменьшения трения.
На Фиг. 4А и 4В показан альтернативный вариант механизма управления из Фиг. 1 и 2, если смотреть снизу, содержащий четыре выступа 54, и в этом случае кронштейн может иметь, по существу, форму креста.
На Фиг. 4А кронштейн не выходит между плитами 52.1, 52.2. и на Фиг. 4В можно видеть кронштейн, который поворачивается относительно плит 52.1, 52.2 и выходит между плитами.
Вокруг охватываемого участка выполнено уплотнение. В показанном варианте выполнения уплотнение образовано фланцем 47, через который проходит вал 56, и сильфоном 49, установленным на радиальном конце фланца и прикрепленным к корпусу, и уплотнением 51 между отверстием фланца 47 и валом 56. Перемещение охватываемого участка 34 компенсируется сильфоном 49.
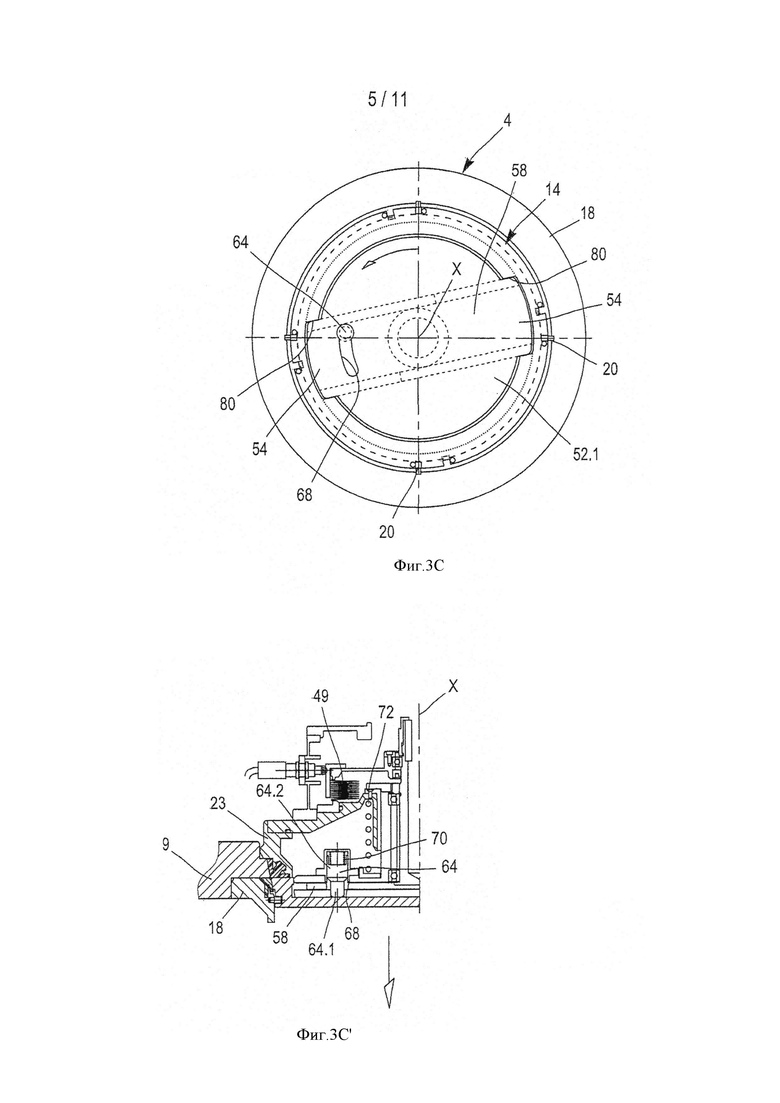
Между участком 44 управления и участком 46 осевого запирания предусматривается средство 62 соединения с утапливанием. Это средство содержит штифт 64, который имеет участок малого диаметра 64.1 и участок большого диаметра 64.2, первое отверстие 66 в верхней плите 52.1, диаметр которого немного больше диаметра участка большого диаметра 64.2, второе отверстие 67 в нижней плите 52.2, диаметр которого немного больше диаметра участка малого диаметра 64.1, но меньше диаметра участка большого диаметра 64.2, при этом первое 66 и второе 67 отверстия являются концентричными, паз 68, образованный в кронштейне в форме дуги окружности, сцентрированной по продольной оси X. Паз 68 имеет ширину немного больше диаметра участка меньшего диаметра 64.1 и меньше диаметра участка большого диаметра 64.2. Конец 68.1 паза 68 имеет диаметр немного больше диаметра участка большого диаметра 64.2, как можно видеть на Фиг. 3С и 3Е.
На верхней плите 52.1 предусмотрены возвратное упругое средство 70 для возврата штифта 64 к наружной стороне дверцы 10. В показанном варианте выполнения упругое средство 70 образовано цилиндрической пружиной сжатия, установленной между стаканом 71 и штифтом 64.
В отсутствии дверцы 14 штифт 64 находится в приведенном положении, и его участок большого диаметра 64.2 расположен в конце паза 68. и участок малого диаметра 64.1 проходит в отверстие 67 нижней плиты 52.2. Кронштейн и две плиты 52.1, 52.2 соединены при вращении и, в общем, участок 46 осевого запирания приводит во вращение участок 44 управления.
Когда контейнер расположен под дверцей 10, штифт 64 перемещается вверх против действия первого упругого средства 70, участок малого диметра 64.1 проходит через паз 68, и штифт 64 может скользить по участку паза, ширина которого немного больше диаметра участка меньшего диаметра 64.1. Кронштейн 58 может поворачиваться относительно двух плит 52.1, 52.2.
Второе упругое средство 72 установлено между верхней плитой 52.1 и неподвижным участком дверцы 10.
Охватывающий элемент расположен на наружной поверхности дверцы 14. Наружная поверхность содержит углубление 76, в общем, круглой формы, снабженное четырьмя вырезами 78 в его боковой периферии, форма которых соответствует четырем выступам плит 52.1, 52.2 для размещения этих выступов. Для размещения кронштейна 58 в боковой кромке углубления 76 предусмотрена периферийная канавка 80. Глубина углубления 76. по существу, равна толщине двух плит 52.1, 52.2 и кронштейна.
Преимущественно, между контейнером и кожухом предусмотрены средства препятствования осевому перемещению (не показаны). Более предпочтительно, они образованы средствами, которые жестко соединяют фланец 9 кожуха и фланец 18 контейнера. Эти средства препятствования осевому перемещению могут быть образованы кольцом, установленным на фланце кожуха и содержащим винтовые канавки, и элементом, поворотно установленным вокруг контейнера; причем этот поворотный элемент содержит два диаметрально противоположных выступа, предназначенных для скольжения по винтовым канавкам. Вращение поворотного элемента вызывает противодействие фланца контейнера фланцу кожуха. Как вариант, контейнер может быть установлен на подъемной плите, и при подъеме плиты она вызывает противодействие
фланца контейнера фланцу кожуха. В случае горизонтального соединения контейнер расположен на тележке, которая перемещается горизонтально относительно камеры, при этом тележка обеспечивает противодействие.
Преимущественно, предусматриваются средства обнаружения для обнаружения присутствия контейнера. Например, датчик 82 определяет верхнее положение охватываемого элемента 34, что указывает на установку контейнера. Датчик 84 преимущественно предназначен для определения нижнего положения охватываемого элемента 34. Это обнаружение указывает, что охватываемый элемент 34 находится на месте в углублении 76 дверцы 14, и что можно начинать этап осевого запирания. Датчики 82 и 84 могут быть образованы подвижной частью, которая замыкает и размыкает электрический контакт.
Ниже приводится описание этого механизма управления со ссылкой на Фиг. 3А-3F и 3A'-3F'.
Первоначально дверца 14 запирается на фланце 18 контейнера, и дверца 10 запирается на фланце 9 кожуха.
Во время первого этапа фланец 18 контейнера расположен внизу и обращен к фланцу 9 кожуха (Фиг. 3А'). Настройка контейнера на месте не требует никакой угловой ориентации контейнера относительно дверцы 10 и фланца 9 кожуха.
Затем два фланца 10, 18 сближаются до тех пор, пока они не придут в контакт. Например, за счет поднятия контейнера или опускания камеры (Фиг. 3В и 3В'). В этом положении, если выступы плит 52.1, 52.2 выровнены с вырезами 80 дверцы 14, плиты 52.1, 52.2 размещаются непосредственно в углублении 76. Если выступы имеют угловое смещение относительно вырезов 80 углублений, они прижимаются к верхнему краю дверцы 14, сжимая два упругих элемента. Охватываемый участок 34 скользит вокруг вала 43. В этом положении штифты 64 находятся в приведенном положении, и участок управления 44 и участок осевого запирания 46 соединены при вращении.
Датчик 82 определяет верхнее положение охватываемого элемента 34. Затем может быть приведен в действие электродвигатель, который посредством угловой передачи вызывает вращение вала 43 в направлении по часовой стрелке, что приводит в движение вал 56 участка 46 осевого запирания, который сам приводит в движение участок 44 управления с помощью штифтов 64. Плиты 52.1, 52.2 и, следовательно, выступы, вращаются вокруг продольной оси X. Во время вращения выступы выравниваются с вырезами 80, и под действием второго упругого средства выступы перемещаются к нижней части углубления 76 и прижимаются к этому углублению. (Фиг. 3С и 3С).
Одновременно штифты 64 перемещаются вверх, разъединяя участок 44 управления и участок 46 осевого запирания.
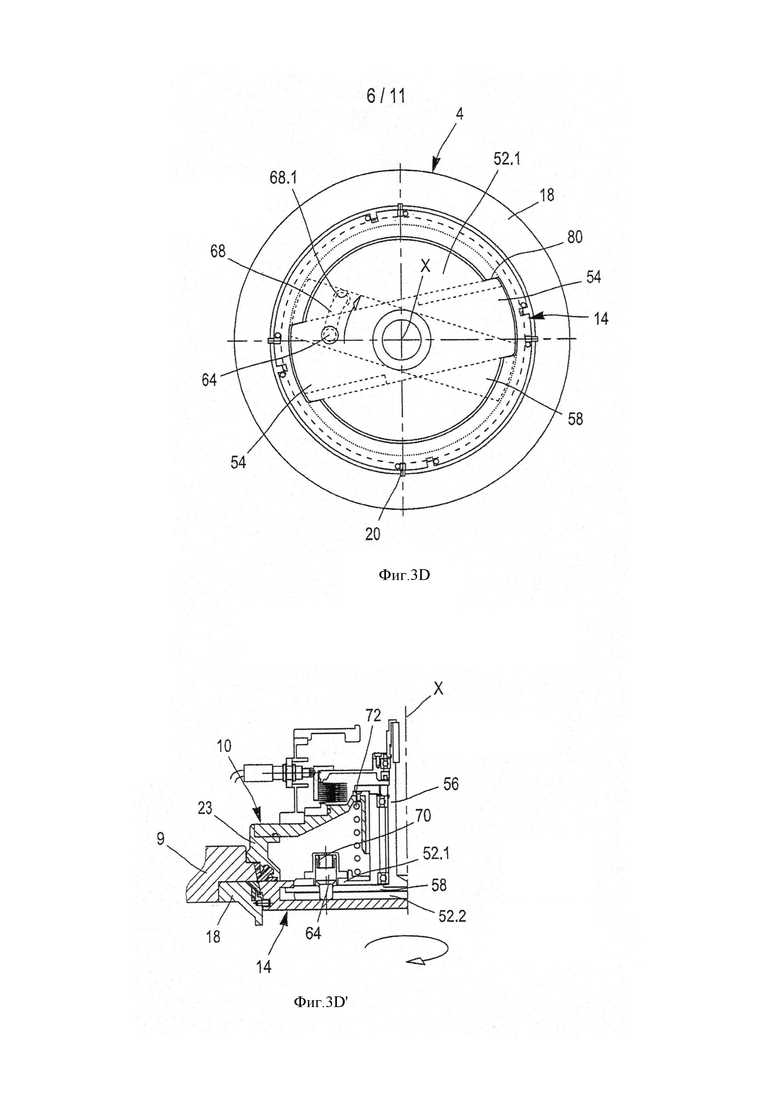
Датчик 84 определяет нижнее положение охватываемого элемента 34. После этого может начинаться следующий этап. Электродвигатель снова приводится в действие, вызывая вращение вала 56 и кронштейна исключительно в направлении по часовой стрелке, поскольку штифты 64 в верхнем положении больше не обеспечивают запирание при вращении, и штифт 64 скользит по пазу в форме дуги окружности. Радиально направленные наружные концы кронштейна размещаются в канавке, ограничивающей углубление, и обеспечивают осевое запирание дверцы 10 на дверце 14. В показанном варианте выполнения кронштейн поворачивается в направлении по часовой стрелке, например, на угол 25'. Длина паза выбирается таким образом, чтобы в конце вращения штифт 64упирался в другой конец паза (Фиг. 3D и 3D'). Во время этого этапа участок 44 управления остается неподвижным.
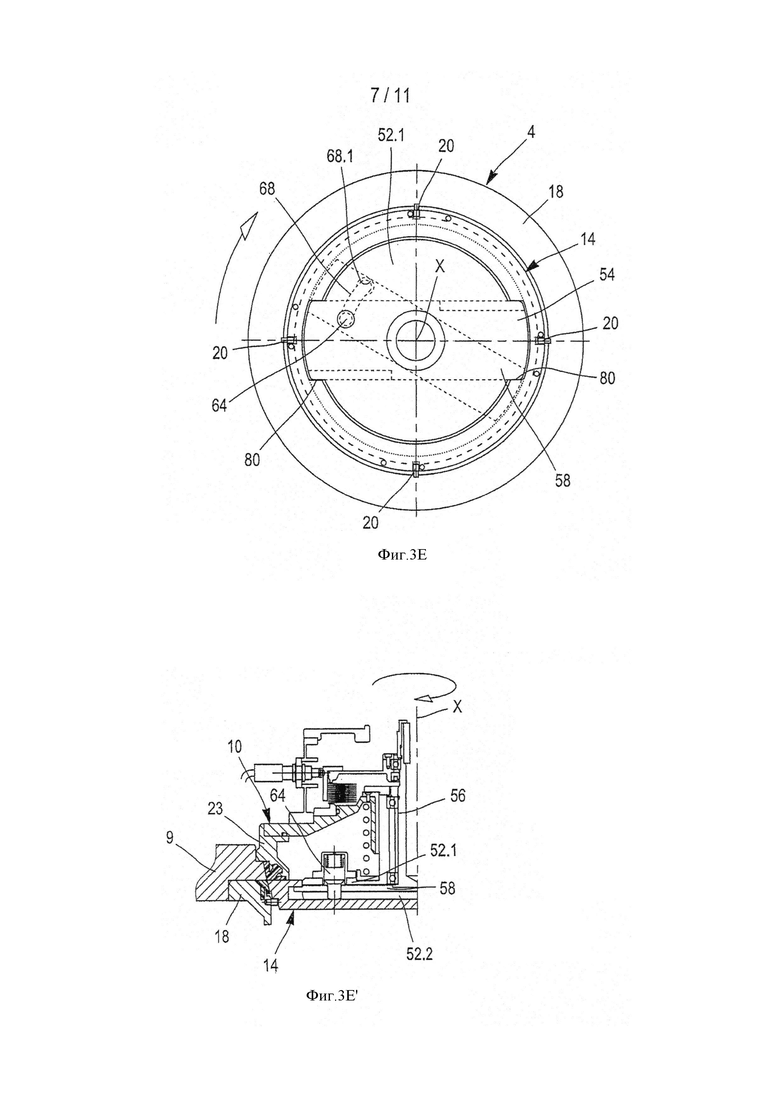
Во время следующего этапа электродвигатель снова приводится в действие, что приводит вал 56 и кронштейн во вращение по часовой стрелке. Штифт 64 упирается в конец паза, и кронштейн 58 приводит штифт 64 во вращение, что приводит во вращение плиты 52.1, 52.2. Однако, поскольку эти плиты расположены в углублении дверцы 10, по существу, без зазора, в частности, выступы, вращение плит 52.1, 52.2 вызывает вращение дверцы 14 в направлении по часовой стрелке относительно фланца 9 контейнера и его разблокирование. Обнаружение разблокирования преимущественно может обеспечиваться, например, измерением тока электродвигателя.
Угол вращения составляет примерно 12,5° (Фиг. 3Е и 3Е').
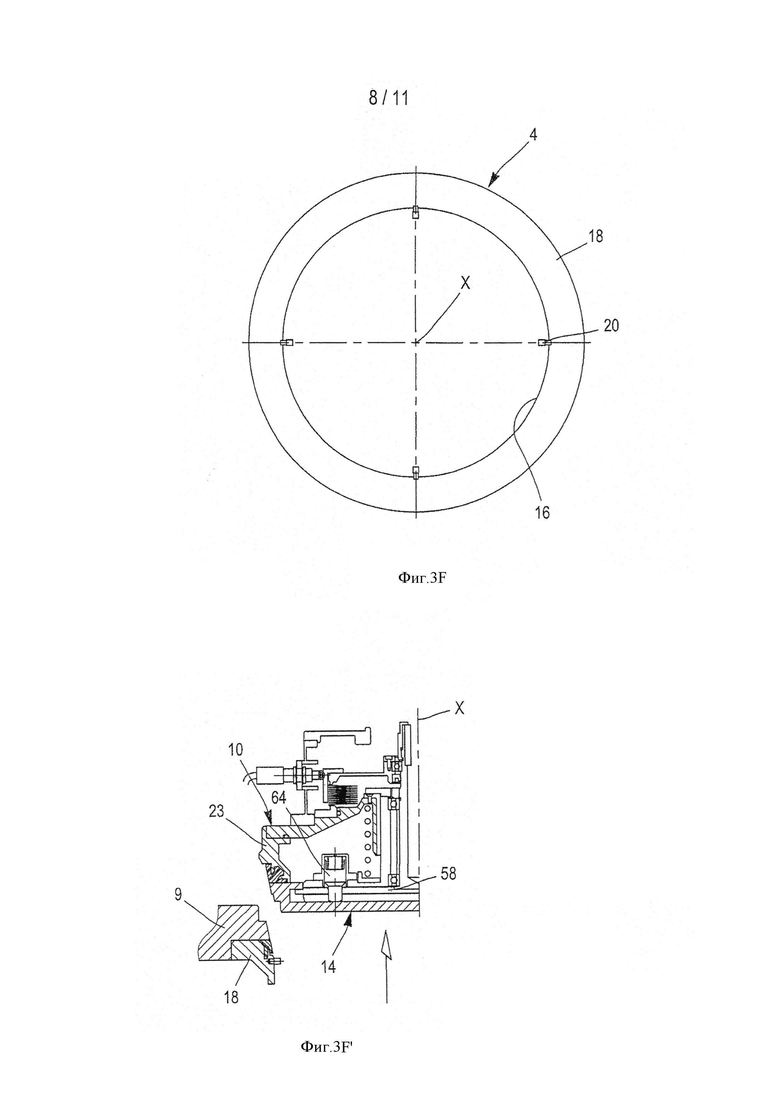
После этого дверца 14 может быть удалена для освобождения отверстия контейнера. Для этого дверца 10 кожуха отсоединяется от фланца 9, на котором расположена дверца 10.
В показанном варианте выполнения удаление крышки 10 осуществляется посредством ее перемещения вверх и вращения (Фиг. 3F и 3F').
Между внутренней стороной кожуха и внутренней стороной контейнера может осуществляться герметичное перемещение, и наружные поверхности дверец герметично изолированы по отношению к внутренним сторонам контейнера и кожуха. Например, как показано на Фиг. 6, контейнер может загружаться порошкообразным материалом, который транспортируется по неподвижному бункеру 6, выходящему в верхнюю стенку кожуха 2, и подвижному участку 86 бункера, который устанавливается в рабочее положение после открывания дверец 10, 14. Подвижный участок бункера шарнирно поворачивается вокруг оси Z1. Механизм D управления шарнирно поворачивается вокруг оси Z2, параллельной оси Z21 и перпендикулярной оси X. Этот подвижный участок 86 бункера преимущественно транспортирует порошкообразный материал внутрь контейнера, ограничивая распыление материала в кожухе. В показанном варианте выполнения бункер 6 содержит участок 6.1 скольжения, который примыкает к подвижному участку бункера, когда тот устанавливается в рабочее положение над контейнером 4. Установка дверец на место выполняется в обратном порядке, что вкратце описывается ниже.
Дверцы 10 и 14 устанавливаются на место в соответствующие фланцы.
Приведение в действие электродвигателя вызывает вращение вала 43 в направлении против часовой стрелки. Поворачивание одного кронштейна 58 освобождает кронштейн и выравнивает его с вырезами углубления. В этот момент дверца 14 еще не заперта на фланце 18.
Затем электродвигатель снова приводится в действие и вызывает вращение в направлении против часовой стрелки кронштейна 58, что приводит в движение плиты 52.1, 52.2 с помощью штифта 64, находящегося с ними в контакте. Дверца 14 снова запирается на фланце 18 контейнера.
Теперь контейнер может быть отсоединен. Перед отсоединением контейнера может быть предусмотрено обнаружение закрывания дверцы 10.
В показанном примере установка выступов плит на место в углубление дверцы контейнера и разблокировка дверцы 14 выполняются в одном и том же направлении вращения. Преимущественно, эти два этапа должны выполняться в противоположных направлениях, что позволяет исключить риск преждевременной разблокировки крышки контейнера во время установки выступов на место.
В показанном варианте выполнения дверца 10 кожуха расположена в нижней стенке кожуха, но она могла бы быть расположена на верхней стенке или на боковой стенке.
Значения угла вращения приведены исключительно в качестве примера. Эти значения определяются в зависимости от размера дверцы контейнера и количества выступов. Более предпочтительно, эти значения выбираются как можно более низкими с целью уменьшения трения и ограничения риска образования мелких частиц.
Кроме того, могут быть предусмотрены средства для обнаружения различных перемещений для дополнительного повышения безопасности, в частности, в случае, когда дверцы не видны.
В показанном варианте выполнения электродвигатель расположен в кожухе, но он может быть расположен снаружи кожуха, например, с помощью соответствующих угловых передач.
Механизм управления по изобретению позволяет не предусматривать ориентацию контейнера, что представляет особый интерес в случае контейнера значительных размеров. Кроме того, это облегчает настройку на месте автоматического герметичного соединения при отсутствии ориентации контейнера, что упрощает монтаж.
Приведение в действие электродвигателя может осуществляться посредством управления с помощью одной или нескольких кнопок. Например, одной кнопки для каждого этапа. Однако в этом случае электродвигатель может приводиться в действие последовательно с помощью программируемого автомата.
В показанном варианте выполнения для приведения во вращение участка управления и участка осевого запирания используется один электродвигатель, что позволяет уменьшить возможные помехи. Однако может быть предусмотрен электродвигатель или средство для приведения во вращение, предназначенные для каждого из участков, и в таком варианте выполнения больше не потребуется средство для препятствования перемещению, образованное штифтом между двумя участками.
На Фиг. 5 показан вариант выполнения, в котором приведение в действие устройства выполняется вручную. Например, рычаг 38', установленный вместо электродвигателя, поворотно перемещается вокруг оси Y, перпендикулярной продольной оси X. В остальном конструкция механизма управления сходна с конструкцией, описанной выше применительно к Фиг. 1-3F'. Может быть предусмотрен рычаг, поворотно перемещающийся вокруг оси X, который позволяет не использовать угловую передачу. Это устройство может быть, к примеру, установлено на место в перчаточном боксе, что обеспечивает легкий доступ оператора к рычагу. Например, ручное управление представляет особый интерес в случае, когда нежелательно использовать электрические устройства, например, принимая во внимание риски возгорания. Более предпочтительно, дверца 10 должна устанавливаться на кожухе для шарнирного вращения. Предусматриваются средства для удерживания фланца у дверцы заподлицо. Ручное управление особенно пригодно для вертикального монтажа.
В этом варианте выполнения с ручным управлением предусмотрены средства для обнаружения наличия дверцы контейнера и ее запертого или разблокированного состояния и обеспечения механической безопасности с целью исключения возможности поворачивания рычага в случае отсутствия контейнера. Эти средства могут быть образованы штифтами, которые в случае отсутствия дверцы 14 выступают и блокируют рычаг и в случае наличия дверцы приводятся в движение, обеспечивая разблокирование рычага. Эти средства хорошо известны специалистам в этой области и не описываются подробно.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫСОКОЗАЩИЩЕННЫЙ МЕХАНИЗМ УПРАВЛЕНИЯ УСТРОЙСТВА ДЛЯ ГЕРМЕТИЧНОГО СОЕДИНЕНИЯ ДВУХ ЗАМКНУТЫХ ПРОСТРАНСТВ | 2012 |
|
RU2604454C2 |
| ПЕРЕДАТОЧНОЕ УСТРОЙСТВО | 2016 |
|
RU2722029C2 |
| УСТРОЙСТВО ВЫДАЧИ ДЕНЕГ В БАНКОМАТЕ | 2004 |
|
RU2309107C2 |
| ПЕРЕНОСНОЙ АВТОМАТИЧЕСКИЙ ГЛАДИЛЬНЫЙ ПРЕСС ДЛЯ БРЮК | 2001 |
|
RU2183699C1 |
| МЕБЕЛЬНАЯ ПЕТЛЯ | 2015 |
|
RU2688726C2 |
| УСТРОЙСТВО ДВЕРЦЫ ДОСТУПА ДЛЯ БАНКОВСКОГО АВТОМАТА, СПОСОБ УДЕРЖАНИЯ ЗАКРЫТОЙ И СЕЛЕКТИВНОГО ОТКРЫТИЯ ДВЕРЦЫ ДОСТУПА БАНКОВСКОГО АВТОМАТА | 1995 |
|
RU2118437C1 |
| УСТРОЙСТВО ОТКРЫВАНИЯ ПОДЪЕМНОЙ ДВЕРЦЫ | 2022 |
|
RU2828043C2 |
| ЗАЩИТНЫЕ УЗЛЫ ДЛЯ ИНФУЗИОННЫХ СИСТЕМ | 2009 |
|
RU2506098C2 |
| БАНКОВСКИЙ АВТОМАТ ДЛЯ ВЫДАЧИ НАЛИЧНЫХ ДЕНЕГ С РЕГУЛИРУЕМОЙ ПЕТЛЕЙ ЯЩИКА И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2004 |
|
RU2326221C2 |
| КОМПЛЕКТНОЕ РАСПРЕДЕЛИТЕЛЬНОЕ УСТРОЙСТВО | 2007 |
|
RU2462800C2 |
Механизм для регулирования устройства для герметичного соединения кожуха и контейнера, при этом кожух содержит дверцу (10) и контейнер содержит дверцу (14), дверца (10) кожуха содержит механизм управления, который содержит охватываемый элемент, взаимодействующий с углублением дверцы (14) контейнера, и этот охватываемый элемент поворотно перемещается вокруг продольной оси (X) и перемещается поступательно вокруг вышеуказанной оси и может размещаться в углублении дверцы (14), обеспечивая совместное запирание двух дверец (10, 14) и разблокирование дверцы (14) контейнера. При осуществлении способа герметичного соединения первого и второго замкнутых пространств используется указанный механизм. Изобретения обеспечивают легкое герметичное соединение двух замкнутых пространств. 4 н. и 15 з.п. ф-лы, 18 ил.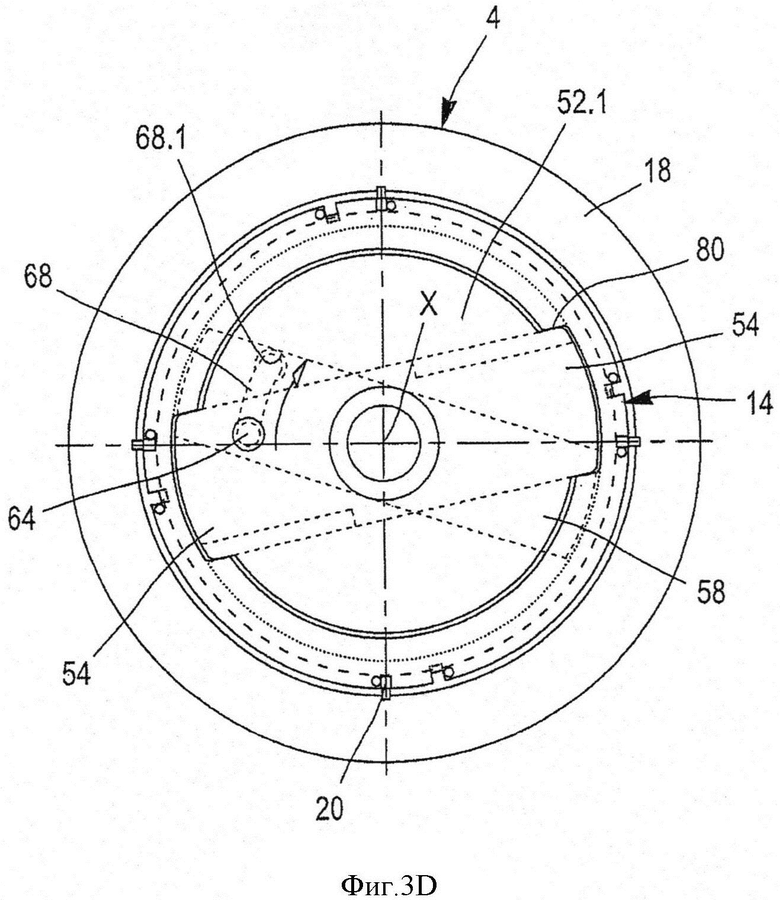
1. Механизм (D) управления устройством для осуществления герметичного соединения первого (2) и второго (4) замкнутых пространств, при этом первое пространство (2) содержит первый фланец (9), ограничивающий первое отверстие, и первую дверцу (10), закрывающую вышеуказанное первое отверстие, и второе пространство (4) содержит второй фланец (18), ограничивающий второе отверстие, и вторую дверцу (14), закрывающую вышеуказанное второе отверстие, вторая дверца (14) соединена со вторым фланцем с помощью байонетного соединения, первая дверца (10) содержит кольцевую часть (23), обеспечивающую герметичный контакт с первым фланцем (9) и второй дверцей (14), и корпус, при этом корпус и кольцевая часть (23) образуют со второй дверцей (14) герметизируемое пространство,
характеризующийся тем, что
он установлен в кольцевой части (23) и содержит
охватываемый элемент (34), предназначенный для взаимодействия с охватывающим элементом, расположенным на второй дверце (14) с помощью байонетного соединения,
средство (38) для приведения во вращение вышеуказанного поступательно перемещаемого охватываемого элемента (34) вокруг продольной оси (X) и относительно кольцевой части (23) для обеспечения соединения между двумя пространствами соответственно, по меньшей мере, следующими этапами:
- первым этапом вращения для установления стыковочного положения охватываемого элемента (34) на охватывающем элементе,
- вторым этапом поступательного перемещения, во время которого охватываемый элемент (34) примыкает к охватывающему элементу,
- третьим этапом вращения для обеспечения осевого запирания двух дверец (10, 14),
- четвертым этапом вращения для обеспечения разблокирования второй дверцы (14) относительно второго фланца (18).
2. Механизм управления по п. 1, характеризующийся тем, что
охватываемый элемент (34) содержит участок (46) осевого запирания и участок (44) управления, которые расположены с возможностью поворота относительно друг друга вокруг продольной оси (X), при этом участок (46) осевого запирания предназначен для осевого запирания первой дверцы (10) и второй дверцы (14), а участок (44) управления предназначен для запирания или разблокирования второй крышки (14).
3. Механизм управления по п. 2, характеризующийся тем, что
участок (46) осевого запирания содержит кронштейн (58), перпендикулярный продольной оси (X) и соединенный со средством (38) для приведения во вращение вокруг продольной оси (X), при этом вышеуказанный кронштейн (58) предназначен для взаимодействия с углублением (76) второй дверцы (14) с целью обеспечения осевого запирания первой (10) и второй (14) дверец, и участок (44) управления содержит, по существу, круглые первую плиту (52.1) и вторую плиту (52.2), снабженные выступами (54), при этом вышеуказанные плиты параллельны и находятся на фиксированном расстоянии друг от друга вдоль продольной оси (X), что обеспечивает возможность поворачивания кронштейна (58), и вышеуказанные выступы (54) предназначены для взаимодействия с вырезами (80) углубления (76) таким образом, что вращение участка (44) управления приводит во вращение вторую дверцу (14), при этом первая плита (52.1) и вторая плита (52.2) соединены со средством (38) для приведения во вращение.
4. Механизм управления по п. 3, характеризующийся тем, что
средство (38) для приведения во вращение входит в зацепление с приводным валом (56), соединенным с кронштейном (58), при этом вышеуказанные первая (52.1) и вторая (52.2) плиты крепятся к полому валу, через который проходит приводной вал (56) участка (46) запирания, и механизм регулирования содержит утапливаемое средство (62) для крепления при вращении, соединяющее кронштейн (58) и первую и вторую плиты (52.1, 52.2) таким образом, что во время первого этапа первая и вторая плиты (52.1, 52.2) и кронштейн (58) вращаются совместно, во время третьего этапа кронштейн (58) поворачивается, и первая и вторая плиты (52.1, 52.2) неподвижны, и во время четвертого этапа первая и вторая плиты (52.1, 52.2) и кронштейн (58) вращаются совместно.
5. Механизм управления по п. 4, характеризующийся тем, что
утапливаемое средство (62) для крепления при вращении содержит по меньшей мере один штифт (64), имеющий участок (64.2) малого диаметра и участок (64.1) большого диаметра и установленный с возможностью скольжения через первую (52.1) и вторую (52.2) плиты и кронштейн (58), при этом первая плита (52.1) снабжена отверстием (66), диаметр которого обеспечивает размещение участка (64.2) большого диаметра, и вторая плита (52.2) снабжена отверстием (67), диаметр которого обеспечивает размещение участка (64.1) малого диаметра и меньше диаметра участка (64.2) большого диаметра, и кронштейн (58) содержит паз (68) в форме дуги окружности, сцентрированной по продольной оси (X), при этом ширина паза (58) позволяет размещать в нем участок (64.1) малого диаметра штифта (64), и ширина паза меньше диаметра участка (64.2) большого диаметра; паз (68) содержит конец (68.1) большой ширины, позволяющий размещать участок (64.2) большого диаметра, и первое упругое средство (70) прикладывает усилие к штифту (64) в направлении второй дверцы, и в закрепленном состоянии штифт (64) проходит через два отверстия (66, 67) первой (52.1) и второй (52.2) плит и конец (68.1) большой ширины паза (68) кронштейна (58).
6. Механизм управления по п. 4, характеризующийся тем, что
приводной вал (56), прикрепленный к кронштейну (58), установлен с возможностью поступательного перемещения вдоль продольной оси (X), второе упругое средство (72) установлено в сжатом состоянии между первой плитой (52.1) и фиксированным участком механизма управления таким образом, чтобы перемещать первую плиту (52.1) и кронштейн (58) в направлении второй дверцы (14).
7. Механизм управления по п. 5, характеризующийся тем, что
утапливаемое средство (62) для крепления при вращении содержит по меньшей мере один штифт (64), имеющий участок (64.2) малого диаметра и участок (64.1) большого диаметра и установленный с возможностью скольжения через первую (52.1) и вторую (52.2) плиты и кронштейн (58), при этом первая плита (52.1) имеет отверстие (66), диаметр которого обеспечивает размещение участка (64.2) большого диаметра, и вторая плита (52.2) имеет отверстие (67), диаметр которого обеспечивает размещение участка (64.1) малого диаметра и меньше диаметра участка (64.2) большого диаметра, и кронштейн (58) содержит паз (68) в форме дуги окружности, сцентрированной по продольной оси (X), при этом ширина паза (68) позволяет размещать в нем участок (64.1) малого диаметра штифта (64), и ширина паза меньше диаметра участка (64.2) большого диаметра; паз (68) содержит конец (68.1) большой ширины, позволяющий размещать участок (64.2) большого диаметра, и упругое средство (70) прикладывает усилие к штифту (64) в направлении второй дверцы, и в закрепленном состоянии штифт (64) проходит через два отверстия (66, 67) первой (52.1) и второй (52.2) плит и конец (68.1) большой ширины паза (68) кронштейна (58).
8. Механизм управления по одному из пп. 2-7, характеризующийся тем, что
содержит средство (82, 84) для обнаружения положения охватываемого элемента снаружи углубления второй дверцы и положения в углублении второй дверцы.
9. Механизм управления по одному из пп. 2-7, характеризующийся тем, что
вращение во время первого этапа имеет направление, противоположное направлению вращения на третьем этапе.
10. Механизм управления по одному из пп. 2-7, характеризующийся тем, что
средство (38) приведения в движение выполнено в виде электродвигателя.
11. Механизм управления по одному из пп. 2-7, характеризующийся тем, что
средство (38) приведения в движение выполнено в виде ручного рычага (38').
12. Устройство для герметичного соединения двух замкнутых пространств, содержащее:
в первом пространстве (2) первый фланец (9), ограничивающий первое отверстие, и первую дверцу (10), закрывающую вышеуказанное первое отверстие, содержащее во втором пространстве (4) второй фланец (18), ограничивающий второе отверстие, и вторую дверцу (14), закрывающую вышеуказанное второе отверстие, при этом вторая дверца (14) соединена вторым фланцем (18) с помощью байонетного соединения,
и механизм (D) управления по одному из пп. 1-11,
характеризующееся тем, что
первая дверца (10) содержит кольцевую часть (23), обеспечивающую герметичный контакт с первым фланцем (9) и со второй дверцей (14), и корпус, при этом корпус и кольцевая часть (23) ограничивают со второй дверцей (14) герметизированное пространство, а вышеуказанный механизм (D) управления установлен в кольцевой части (23).
13. Устройство для соединения по п. 12, характеризующееся тем, что
первая дверца (10) шарнирно соединена со стенкой первого пространства с помощью шарнира.
14. Система для перемещения порошка, содержащая
устройство для соединения по п. 12 или 13, характеризующаяся тем, что
первое пространство (2) является кожухом, содержащим верхнюю стенку, через которую герметично проходит бункер (6), обеспечивающий подачу порошкообразного материала, нижнюю стенку (12), снабженную первым фланцем (9) и первой дверцей (10) в закрытом положении, при этом второе пространство (4) выполнено в виде контейнера, подлежащего заполнению, который снабжен вторым фланцем (18) и второй дверцей (14) в закрытом положении,
средство для приведения в контакт посредством перемещения вдоль продольной оси первого (9) и второго (18) фланцев,
средство для препятствования осевому перемещению второго фланца (18) относительно первого фланца (9), и
подвижный участок (86) бункера, расположенный в камере (2), который выполнен с возможностью соединения с концом бункера (6), открытым в камеру, и отверстием контейнера (4).
15. Система для перемещения порошка по п. 14, характеризующаяся тем, что
перемещение подвижного участка (86) бункера обеспечивается посредством электродвигателя.
16. Система для перемещения порошка по п. 14 или 15, характеризующаяся тем, что смещение двух дверец (10, 14), соединенных друг с другом, обеспечивается посредством электродвигателя.
17. Способ герметичного соединения первого и второго замкнутых пространств с помощью механизма управления по одному из пп. 1-11, содержащий этапы:
a) приведение в контакт первого фланца и второго фланца,
b) приведение во вращение охватываемого элемента до тех пор, пока он поступательно не переместится в углубление второй дверцы,
c) приведение во вращение охватываемого элемента для осевого запирания первой и второй дверец,
d) приведение во вращение охватываемого элемента для разблокирования второй дверцы и второго фланца,
e) отведение узла, образованного первой и второй дверцами.
18. Способ соединения по п. 17, характеризующийся тем, что этап b) выполняется после подтверждения выполнения этапа а), этап с) выполняется после подтверждения выполнения этапа b), и этап d) выполняется после подтверждения выполнения этапа с).
19. Способ соединения по п. 17 или 18, характеризующийся тем, что
направление вращения на этапе b) является противоположным по отношению к направлению вращения на этапе d).
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| DE 102006013157 А1, 19.04.2007 | |||
| УСТРОЙСТВО БЕСПЫЛЬНОЙ ЗАГРУЗКИ СЫПУЧИХ МАТЕРИАЛОВ В МЯГКИЕ КОНТЕЙНЕРЫ | 2007 |
|
RU2376218C2 |
| Устройство для герметичной пересыпки мелкодисперсных токсичных сыпучих материалов | 1978 |
|
SU766998A1 |
| УСТРОЙСТВО ДЛЯ ГЕРМЕТИЧНОЙ СТЫКОВКИ СЪЕМНЫХ КАМЕР РАЗНОГО ДИАМЕТРА | 2005 |
|
RU2367040C2 |

