Заявляемое решение относится к области дистанционного контроля (мониторинга) безбалластного железнодорожного пути с помощью сенсорно-оптических (волоконно-оптических систем) и может быть использовано для передачи информации с контролируемых протяженных участков железнодорожного пути, на которых необходимо выявление не только факта, но и предпосылок возникновения аварийных ситуаций различной природы происхождения.
Известны волоконно-оптические распределенные сенсоры, предназначенные для мониторинга различных объектов, работа которых основана на регистрации параметров тонкой структуры рассеянного излучения, например волоконно-оптические датчики измерения распределения температуры, основанные на эффектах комбинационного рассеяния (эффект Рамана), в которых амплитуда рассеянного сигнала зависит от температуры (http://temperatures.ru/pages/volokonno_opticheskie_ datchiki_temperatury).
Известны волоконно-оптические датчики распределения температуры или внутреннего механического напряжения (растяжения), на основе регистрации параметров рассеяния Релея (URL: http://lunainc.com/growth-area/strain-and-temperature-sensing).
Известна система дистанционного контроля состояния железнодорожного пути, характеризуемая наличием установленной вблизи рельсового пути в зоне железнодорожных переездов, железнодорожных мостов, потенциального камнепада или схода лавин, а также плавучих грунтов - плавунов подсистемы датчиков, способных регистрировать информацию о состоянии железнодорожного полотна, подключенной к беспроводному передатчику информационных сигналов, полученных от датчиков, выполненному с возможностью передачи полученного от датчиков информационного сигнала по радиоканалам и/или каналам спутниковой связи к установленному в диспетчерском пункте приемнику информационного сигнала, подключенном к электронному блоку обработки полученного информационного сигнала, выполненному на базе компьютера, причем указанный электронный блок выполнен с возможностью анализа обстановки на контролируемом участке железнодорожного пути и предупреждения о возможной аварийной ситуации (заявка РФ №2011114676, МПК: B61b 29/00, опубл. 20.10.2012 г.) - аналог.
Недостатком известного решения является принципиальная невозможность контроля состояния безбалластного железнодорожного пути на протяженных участках и низкая надежность работы.
Техническим результатом, на достижение которого направлено заявляемое решение, является повышение надежности контроля состояния безбалластного железнодорожного пути на всей требуемой протяженности путем повышения точности измерения деформации, устранения влияния температурных эффектов, особенно в случае, когда температура в грунте неоднородна.
Указанный технический результат достигается тем, что устройство дистанционного контроля состояния безбалластного железнодорожного пути, содержит расположенные под каждым рельсом в два слоя сенсорно-оптический кабель фиксации перемещения и сенсорно-оптический кабель фиксации температуры, выполненные с возможностью их подключения к измерительной аппаратуре, причем первый слой сенсорно-оптического кабеля фиксации перемещения и сенсорно-оптического кабеля фиксации температуры расположен под укрепленным слоем земляного полотна, второй слой - в нижней части щебеночно-песчано-гравийной смеси, а каждый слой сенсорно-оптического кабеля фиксации перемещения механически связан с грунтом посредством фиксаторов.
Устройство, характеризующееся тем, что сенсорно-оптический кабель фиксации перемещения и сенсорно-оптический кабель фиксации температуры подключаются к измерительной аппаратуре посредством кросс-муфты.
Устройство, характеризуемое тем, что сенсорно-оптический кабель фиксации перемещения при укладке снабжен грунтовыми фиксаторами, выполненными, например, в виде якоря.
В данной заявке термин «под рельсом» означает расположение сенсорно-оптических кабелей фиксации перемещения и температуры не только непосредственно на оси рельса на поперечном профиле земляного полотна на вертикальной оси, что является оптимальным вариантом, но и вне этой оси со смещением по ширине (по горизонтали), обеспечивающим при работе устройства требуемую надежность контроля состояния безбалластного железнодорожного пути. Величина отклонения зависит от параметров безбалластного пути и выбирается в каждом случае отдельно, например, для безбалластных конструкций с монолитной бетонной плитой толщиной 30 см, отклонение от оси до 10 см обеспечивает требуемую надежность контроля.
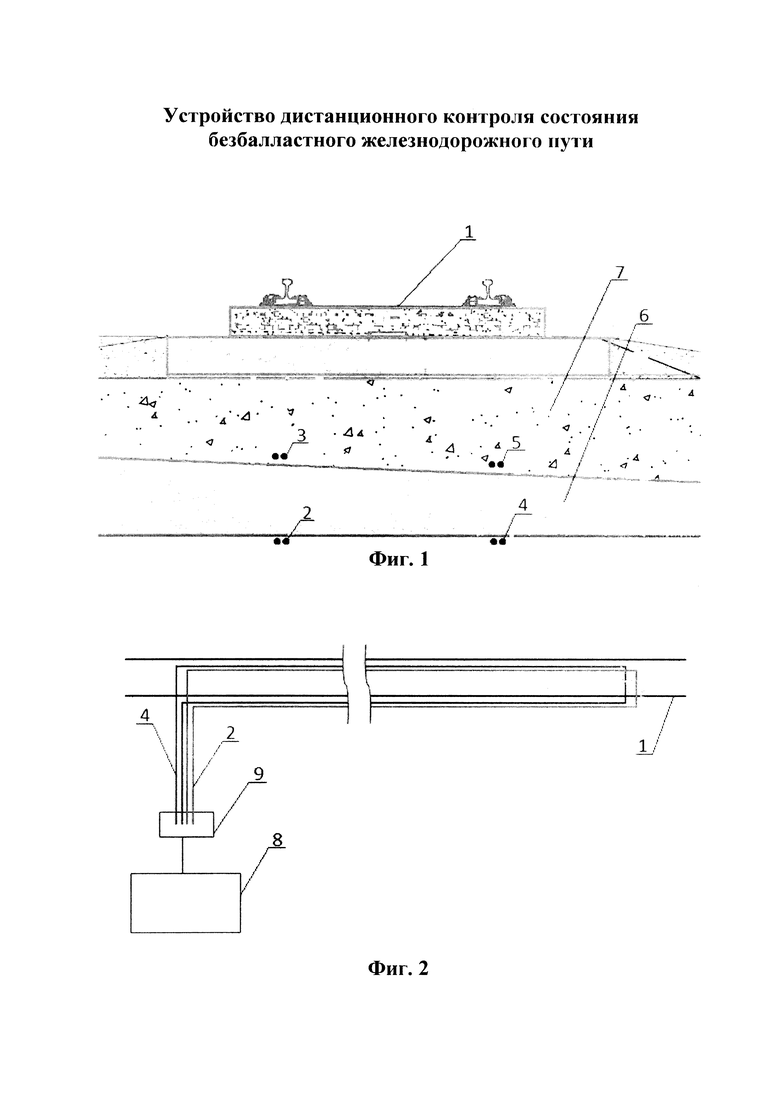
Заявляемое решение конкретизировано на фиг. 1 и 2, где на фиг. 1 представлен поперечный разрез устройства, а на фиг. 2 - схема устройства.
Заявляемое устройство содержит безбалластный путь с уложенными рельсами 1, под каждым из которых размещены в два слоя сенсорно-оптические кабели фиксации перемещения 2 и 3 и сенсорно-оптические кабели фиксации температуры 4 и 5. Первый слой сенсорно-оптического кабеля фиксации перемещения 2 и сенсорно-оптического кабеля фиксации температуры 4 размещен под укрепленным, например, при помощи полифилизаторов слоем грунта 6, а второй слой сенсорно-оптического кабеля фиксации перемещения 3 и сенсорно-оптического кабеля фиксации температуры 5 размещен в нижней части щебеночно-песчано-гравийной смеси 7. Оптические разъемы сенсорно-оптического кабеля фиксации перемещения 2 и 3 и сенсорно-оптического кабеля фиксации температуры 4 и 5 подключаются к измерительной аппаратуре 8 посредством кросс-муфты 9. Измерительная аппаратура 8 имеет в своем составе ГТК и выполнена с возможностью определения расположения участков с вертикальными перемещениями грунта для каждого слоя земляного полотна под левой и правой рельсовыми нитями по длине пути и расчета величин вертикальных перемещений.
Укрепленный слой сооружается путем перемешивания верхнего слоя грунта с двухкомпонентной (порошок и жидкость) смесью полифилизаторов либо другими известными способами, в результате чего такой слой приобретает дополнительные прочностные свойства (значения модуля деформации укрепленного грунта должно быть не менее 80 МПа.) Процесс укладки сенсорных кабелей оптоволокна состоит в откопке траншеи, укладке кабелей, точечной механической фиксации сенсорных оптических кабелей деформации, например, посредством фиксаторов - якорей, на расстоянии между ними, обеспечивающем неподвижность участка кабеля относительно окружающего грунта, например 2 м, с последующей присыпкой кабелей слоем песка, после чего траншея закапывалась и утрамбовывалась до заданных проектом значений. После завершения работ по созданию укрепленного слоя грунта выполнена послойная отсыпка и уплотнение слоя щебеночно-гравийно-песчаной смеси (ЩПГС) в соответствии с ТУ 5711-284-01124323-2012 с укладкой второго слоя сенсорных оптических кабелей.
Сенсорно-оптические кабели фиксации перемещения 2 и 3 и сенсорно-оптические кабели фиксации температуры 4 и 5 расположены в местах наиболее вероятных вертикальных перемещений слоев земляного полотна так, что по перемещениям отдельных точек можно построить трехмерное изображение осадок на границах слоев.
Работа заявляемого устройства основана на следующем.
Предлагаемое решение с использованием сенсорно-оптической (волоконно-оптической) системы сигнализации состояния безбалластного пути состоит из нескольких взаимосвязанных друг с другом частей - линейной и программно-аппаратной. Линейная часть в свою очередь состоит двух подсистем. Первая подсистема, деформационная, предназначена для мониторинга подвижек земляного полотна и состоит из сенсорно-оптических кабелей фиксации перемещения 2 и 3. Вторая подсистема состоит из сенсорно-оптических кабелей фиксации температуры 4 и 5 с возможностью их подключения к анализатору и компенсации температурных эффектов. Принципы работы подсистем основываются на диагностике состояния сенсорно-оптического кабеля (сенсора) - измерении распределения температуры и распределения деформации по всей его длине. Ключевым измерительным прибором программно-аппаратной части системы является анализатор DITESTSTA-R, который представляет собой импульсный оптический рефлектометр, измеряющий сигнал вынужденного Бриллюэновского рассеяния из каждой точки оптического волокна сенсорно-оптического кабеля. Анализ сигнала вынужденного Бриллюэновского рассеяния, в зависимости от типа подключенного сенсорно-оптического кабеля, позволяет измерять распределение температуры или напряжения по всей его длине. Таким образом, протяженный сенсорно-оптический кабель является эквивалентом огромного количества точечных датчиков (например, программное обеспечение анализатора DITESTSTA-R позволяет разбить контролируемый участок длиной 50 км на 100000 датчиков). Принцип работы анализатора основан на вынужденном рассеянии Мандельштама-Бриллюэна (ВРМБ), которое является физическим свойством материала оптического волокна и может использоваться для измерения механических деформаций и температуры вдоль оптического волокна. ВРМБ возникает в результате взаимодействия между проходящим излучением и присутствующими в среде прохождения акустическими волнами, возбужденными тепловыми колебаниями решетки. Это взаимодействие приводит к возникновению рассеянных волн (волн, двигающихся в обратном направлении), испытывающих допплеровский сдвиг по частоте вследствие самой природы движения акустических волн. Поскольку акустическая скорость строго зависит от температуры и механических деформаций, положение бриллюэновского рассеяния света (бриллюэновского сдвига частоты) также зависит от температуры и механических деформаций.
В случае изменения только температуры νΒ (Τ)=Coef1*T+Coef0, где типовые значения для стандартных волокон ITU-G652 Coef1=0,93 МГц/°С и Coef0=10,8 ГГц.
В случае изменения только деформации νΒ (ε)=Coef1*ε+Coef0, где типовые значения для стандартных волокон ITU- G652 Coef1=505,5 МГц/% и Coef0 - 10,8 ГГц.
При измерении бриллюэновского сдвига частоты с известными калибровочными коэффициентами Coef1 и Coef0 оптического волокна можно рассчитать температуру и механические деформации.
Измерения распределения температуры и механических деформаций возможны с помощью временного анализа, сходного с радиолокационным методом. В оптическое волокно вводится излучение - оптический импульс, и вернувшийся рассеянный свет регистрируется детектором как функция времени. Зная скорость света в оптическом волокне, можно пересчитать время распространения оптического импульса в волокне в пройденное им расстояние и определить точное место расположения деформации. Длительность оптического импульса определяет пространственное разрешение измерения, так как информация, собранная в данный момент, соответствует взаимодействию, произошедшему на расстоянии, и определяется длиной оптического волокна, которое успел пройти импульс света. Например, оптический импульс длительностью 10 нс имеет пространственное разрешение 1 метр и означает, что событие, произошедшее вдоль расстояния в 1 метр будет обнаружено, но не может быть точно измерено. Температура и механические деформации, являющиеся приблизительно постоянными на расстоянии большем, чем пространственное разрешение, могут измеряться с наилучшей точностью, до 0,5 м.
Аппаратная часть системы DITEST STA-R отображает обработку оптического сигнала, которая обеспечивает улучшенные тестовые показатели в отношении времени измерения, динамического диапазона и расстояний. Методика получения информации основана на последовательной регистрации бриллюэновских взаимодействий на различных характерных частотах. Сначала составляется полная частотная характеристика оптического волокна как функция расстояния, а затем производится расчет локального бриллюэновского сдвига частоты с учетом максимального бриллюэновского взаимодействия в каждой точке оптического волокна.
Сенсорно-оптический кабель (сенсор) в зависимости от конструкции (способа фиксации и защиты оптического волокна) может быть чувствителен к температуре и/или деформации, при этом он является полностью пассивным устройством, не требующим электропитания.
Сенсорно-оптические кабели фиксации перемещения (деформации) устанавливаются вдоль всего контролируемого участка безбалластного железнодорожного пути с заглублением в земляное полотно, в соответствии с заявляемым решением, что позволяет получить информацию о его подвижках. Конфигурация установки зависит от требуемой точности. Сенсорно-оптические кабели фиксации температуры устанавливаются вдоль всего контролируемого участка сигнализации вдоль волоконно-оптических кабелей деформации, и выполняют функции связи для подключения сенсоров деформации, и позволяют компенсировать температурные эффекты, что существенно повышает точность измерения деформации.
Оптические разъемы сенсорно-оптических кабелей размещены в защитной оболочке (кросс-муфте), которая расположена, например, в специальном колодце, расположение которого должно обеспечивать беспрепятственный круглогодичный подъезд к нему мобильной лаборатории измерения оптического кабеля. Программно-аппаратная часть может и не устанавливаться, а подключаться к сенсорам на время проведения периодических измерений. Опрос датчиков может осуществляться путем периодического подключения измерительной аппаратуры через специальные разъемы с периодичностью, например, раз в три месяца. В это же время проводится точная геодезическая съемка. Подвижки земляного полотна в вертикальной плоскости, вызванные просадкой грунта, регистрируются сенсорно-оптическими кабелями фиксации перемещения за счет горизонтальной составляющей. Вертикальные подвижки необходимо контролировать в двух уровнях: бетонный слой и земляное полотно. Для этой цели и уложено два слоя сенсорно-оптического кабеля фиксации перемещения 2 и 3, а также сенсорно-оптического кабеля фиксации температуры 4 и 5. Конфигурация сенсорно-оптических кабелей в земляном полотне, т.е. место их расположения, является существенным фактором, позволяющим проводить измерения и интерпретацию параметров с заданной точностью. На сенсорно-оптические кабели фиксации деформации с шагом 1-3 метра установлены якоря, передающие продольное смещение грунта на них, причем для оптимизации технического результата якоря могут быть снабжены встроенным предохранителем, который срабатывает в случае, когда сила, действующая со стороны якоря на сенсорный кабель, превышает заданную величину. Одним из возможных вариантов якорей (но не единственным) могут быть, например, якоря, известные из патента РФ №2485448, опубл. 20.06.2013 г. Подвижки земляного полотна в вертикальной плоскости, вызванные просадкой грунта, регистрируются за счет горизонтальной составляющей (считая при этом, что продольные подвижки под бетонным основанием отсутствуют).
В качестве оптических кабелей фиксации перемещений (деформации) может быть использован, например, SMC-V3 (оптокабель перемещений), который является чувствительным элементом и специально разработан для использования в распределенных волоконно-оптических системах мониторинга механических деформаций. SMC-V3 состоит из специального оптического волокна, покрытого специальными защитными оболочками, в числе которых есть трубка из нержавеющей стали, которая повышает стойкость к раздавливанию и герметично запечатывает оптическое волокно. Конструкция кабеля оптимизирована для передачи деформации растяжения от внешней оболочки кабеля к чувствительному элементу - оптическому волокну и гарантирует линейный отклик в диапазоне деформаций от -1% (сжатие) до 1% (растяжение) и высокую повторяемость результатов измерений. Дополнительная проволочная броня из нержавеющей стали обеспечивает высокую прочность кабеля на растяжение и его защиту от грызунов. Низкое километрическое затухание кабеля SMC-V3 позволяет использовать его для мониторинга распределения деформации объектов большой протяженности, а надежная защищенная конструкция позволяет проводить его монтаж непосредственно в грунт и его эксплуатацию в суровых условиях.
В качестве сенсорно-оптического кабеля фиксации температуры может быть использован, например, сенсорно-оптический кабель модульной конструкции (заполненный), бронированный стальной проволокой ДКП-20-6z-4/32.
Заявляемое устройство опробовано заявителем для безбалластного пути типа Tines, Alstom, MaxBogl и LTV и установлено, что оно обеспечивает требуемую надежность контроля состояния безбалластного железнодорожного пути - точность вертикальных перемещений слоев основания составляет ±2 мм, точность определения места этих перемещений по длине кабеля составляет ±1 м.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система мониторинга верхнего строения безбалластного и бесстыкового пути на мосту высокоскоростной магистрали | 2018 |
|
RU2681766C1 |
| Система контроля и диагностики искусственных сооружений | 2019 |
|
RU2717693C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ЗЕМЛЯНОГО ПОЛОТНА, КОНТРОЛЬНО-ОПОВЕСТИТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ОПРОСА И СБОРА ИНФОРМАЦИИ О СОСТОЯНИИ ЗЕМЛЯНОГО ПОЛОТНА ДЛЯ КОНТРОЛЬНО-ОПОВЕСТИТЕЛЬНОЙ СИСТЕМЫ | 2022 |
|
RU2774323C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕФОРМАЦИЙ ГРУНТА | 2011 |
|
RU2485448C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ГРУНТА | 2013 |
|
RU2540252C1 |
| Земляное полотно высокоскоростной магистрали | 2017 |
|
RU2668529C1 |
| Земляное полотно высокоскоростной магистрали | 2017 |
|
RU2668530C1 |
| РАСПРЕДЕЛЕННЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ СЕНСОР ТЕМПЕРАТУРЫ ПОВЫШЕННОЙ ЧУВСТВИТЕЛЬНОСТИ | 2013 |
|
RU2552399C1 |
| Система виброакустических измерений и система контроля местоположения поезда | 2023 |
|
RU2814181C1 |
| Система для прокладки кабельных коммуникаций на перегоне для безбалластного железнодорожного пути | 2018 |
|
RU2684159C1 |
Изобретение относится к области железнодорожной автоматики и телемеханики для контроля состояния путей. Устройство содержит расположенные под каждым рельсом в два слоя сенсорно-оптический кабель фиксации перемещения и сенсорно-оптический кабель фиксации температуры, выполненные с возможностью их подключения к измерительной аппаратуре, причем первый слой сенсорно-оптического кабеля фиксации перемещения и сенсорно-оптического кабеля фиксации температуры расположен под укрепленным слоем земляного полотна, второй слой - в нижней части щебеночно-песчано-гравийной смеси. Причем каждый слой сенсорно-оптического кабеля фиксации перемещения механически связан с грунтом посредством фиксаторов. Достигается повышение надежности контроля безбалластного железнодорожного пути. 1 з.п. ф-лы, 2 ил.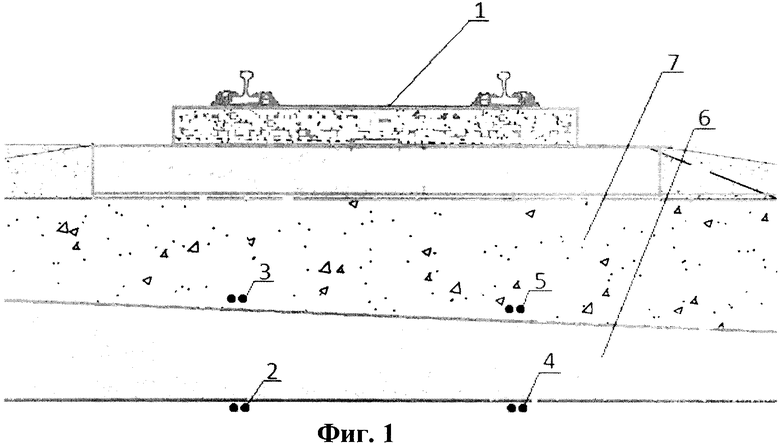
1. Устройство дистанционного контроля состояния безбалластного железнодорожного пути, содержащее расположенные под каждым рельсом в два слоя сенсорно-оптический кабель фиксации перемещения и сенсорно-оптический кабель фиксации температуры, выполненные с возможностью их подключения к измерительной аппаратуре, причем первый слой сенсорно-оптического кабеля фиксации перемещения и сенсорно-оптического кабеля фиксации температуры расположен под укрепленным слоем земляного полотна, второй слой - в нижней части щебеночно-песчано-гравийной смеси, а каждый слой сенсорно-оптического кабеля фиксации перемещения механически связан с грунтом посредством фиксаторов.
2. Устройство по п. 1, отличающееся тем, что сенсорно-оптический кабель фиксации перемещения и сенсорно-оптический кабель фиксации температуры подключаются к измерительной аппаратуре посредством кросс-муфты.
| CN 201224417 Y, 22.04.2009 | |||
| WO 2012152575 A1, 15.11.2012 | |||
| Генератор импульсов к электрической изгороди для пастбищ | 1959 |
|
SU129071A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПРОДОЛЬНЫХ ПЕРЕМЕЩЕНИЙ РЕЛЬСОВОЙ ПЛЕТИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2000 |
|
RU2174082C1 |

