Группа изобретений относится к измерительной технике на железнодорожном транспорте с применением распределённых датчиков на основе волоконно-оптических кабелей (ВОК) и может быть использовано для контроля местоположения поезда.
Известна распределенная волоконно-оптическая система регистрации виброакустических сигналов, содержащая кабельную или отдельную волоконно-оптическую измерительную линию на одномодовом оптическом волокне длиной Lи от ~10 м до ~100 км с установленным на ее удаленном конце френелевским зеркалом или фарадеевским отражателем с одной стороны и присоединенную с другой стороны к оптоэлектронному блоку системы, состоящему из одночастотного непрерывного и малошумящего лазерного источника с волоконным выходом, с узкой спектральной линией и большой длиной когерентности Lк=1-10 км излучения, оптически соединенного с одним первым входом направленного одномодового разветвителя Х-типа, первый выход которого оптически присоединен к указанной измерительной волоконной линии, а второй выход оптически присоединен к звукоизолированной катушке из одномодового волокна длиной плеча опорного канала длиной Lo, примерно равной по длине плечу измерительной кабельной волоконной линии Lo≈Lи с разницей длин меньше длины когерентности излучения лазерного источника Lи-Lo≤Lк, последовательно присоединенной к френелевскому или фарадеевскому отражателю на втором конце, образующие разомкнутую двухплечевую схему волоконного интерферометра Майкельсона, сигналы с которого поступают со второго входа/выхода направленного волоконного разветвителя на малошумящий фотоприемник и регистратор виброакустических сигналов; при этом в качестве локальных датчиков вибрационных сигналов используются линейные отрезки одномодового оптического волокна в волоконно-оптической измерительной линии, непосредственно укрепленные на вибрирующей поверхности объекта, а в качестве датчиков акустических сигналов используется по меньшей мере одна малогабаритная катушка из одномодового оптического волокна или по меньшей мере один многовитковый элемент из одномодового оптического волокна в волоконно-оптической измерительной линии ([1], RU2485454, G01H 9/00, G01D 5/353,20.06.2013).
При этом в известном изобретении для определения координат отдельных чувствительных элементов на волоконно-оптической измерительной линии применяются локальные периодически излучающие источники, например, пьезоизлучатели или виброзвонки, обозначающие координату датчика по заранее заданной определенной частоте звучания.
Известное изобретение обеспечивает высокую чувствительность измерения в широкой полосе частот как вибрационных воздействий, так и акустических сигналов с помощью одной волоконно-оптической линии, подключаемой к измерительной оптоэлектронной системе с одного конца при значительной длине волоконной линии, сохранении гибкости, помехозащищенности от электромагнитных воздействий и простыми мерами по увеличению локальной чувствительности с помощью многовитковых элементов из оптического волокна в линии.
Недостатком известного изобретения является использование пьезоизлучателей или виброзвонков для обозначения координат мест установки отдельных чувствительных элементов, поскольку их местоположение может быть бесконтрольно изменено в результате случайного или путём целенаправленного злоумышленного воздействия, в результате чего появятся неконтролируемые ошибки привязки сигналов, формируемых распределёнными извещателями на основе ВОК, по отношению к истинным (контрольным) координатам их местоположения.
Наиболее близким аналогом в части системы виброакустических измерений является система виброакустических измерений для контроля местоположения поезда, содержащая проложенный на заданном расстоянии от железнодорожного пути одномодовый волоконно-оптический кабель, одна сторона которого выполнена с герметичной заглушкой, а другая сторона подключена к входу/выходу рефлектометра, выход которого соединен с блоком обработки, при этом каждое определенное место внешней оболочки кабеля, координаты которого известны, механически соединены с рельсом железнодорожного пути посредством элемента, обеспечивающего передачу вибраций (RU2727438, B61L 25/02, 21.07.2020, описание).
Использование метода механических «маркеров» для повышения точности волоконно-оптических измерений (ВОИ) отличается высокой чувствительностью, так как внешние возмущения воспринимаются каждым участком сенсора одновременно от всех колёсных пар поезда.
Однако при определении дефектов рельс и подвижного состава каждый отдельный момент наезда колёсных пар на рельсовых стыках оказывается дополнительно замаскированным. Также при этом маскируются и импульсные проявления других дефектов. Эффект маскирования усиливается также в связи со снижением жесткости конструкции при дефектах и поломках рельсов, что существенно снижает возможности достоверного обнаружения и идентификации дефектов рельс; дефектов поверхности катания колеса (ползун, навар); схода железнодорожного подвижного состава; волочения деталей вагона; наличие ударных воздействий по верхнему строению пути); неисправностей тележки подвижного состава с последующим заклиниванием.
Известна система контроля местоположения поезда, содержащая бортовой приемник спутниковой навигационной системы, выход которого через блок привязки географических координат к трассе железнодорожной линии связан с бортовым контроллером, вход и выход которого соединены соответственно с выходом и входом локомотивной радиостанции, и установленный в центре управления информационно-управляющий сервер, первый вход и первый выход которого соединены соответственно с выходом и входом устройства электрической централизации, второй вход и второй выход информационно-управляющего сервера соединены соответственно с выходом и входом стационарного радиоприемопередатчика, в центре управления установлены сенсорное устройство слежения за передвижением поезда по перегону и блок формирования данных о местоположении головного и хвостового вагонов поезда, вдоль железнодорожного пути на заданном расстоянии от него проложен волоконно-оптический кабель с герметичной заглушкой и соединен с входом/выходом сенсорного устройства слежения за передвижением поезда по перегону, дополнительный выход которого соединен с первым входом блока формирования данных о местоположении головного и хвостового вагонов поезда, выход и второй вход которого соединены соответственно с третьим входом и третьим выходом информационно-управляющего сервера (RU 2560227, B61L 25/02, 20.08.15).
К недостатку известной системы контроля местоположения поезда следует отнести невысокую точность определения занятости путевых участков, которая обусловлена тем, что отраженный оптический сигнал (рефлектограмма) распределения акустического воздействия по всей длине оптоволокна, поступающий с выхода сенсорного устройства непосредственно на первый вход блока формирования данных о местоположении головного и хвостового вагонов поезда представляет собой смесь сигналов, относящихся не только к виброакустическому воздействию на оптоволокно от контролируемого поезда, но и к посторонним источникам виброакустического воздействия на это же оптоволокно. Кроме того, уровень этого сигнала подвержен влиянию нестабильностей коэффициентов передачи в трактах преобразования виброакустического воздействия в оптические сигналы из-за влияния на характеристики оптоволокна переменных климатических факторов и отклонений от проектных значений реальных расстояний участков оптоволоконного кабеля от соответствующих контролируемых ими участков рельсового пути. В результате чего, в известной системе границы и параметры движения поезда определяются с большой погрешностью.
Наиболее близким аналогом в части системы контроля местоположения поезда является система контроля местоположения поездов, содержащая бортовой приемник спутниковой навигационной системы, выход которого через блок привязки географических координат к трассе железнодорожной линии связан с бортовым контроллером, вход и выход которого соединены соответственно с выходом и входом локомотивной радиостанции, и установленный в центре управления информационно-управляющий сервер, первый вход и первый выход которого соединены соответственно с выходом и входом устройства электрической централизации, второй вход и второй выход информационно-управляющего сервера соединены соответственно с выходом и входом стационарного радиоприемопередатчика, а также установленные в центре управления сенсорное устройство слежения за передвижением поезда по перегону и блок формирования данных о местоположении вагонов поезда, при этом вдоль железнодорожного пути на заданном расстоянии от него проложен волоконно-оптический кабель с герметичной заглушкой и соединен с входом/выходом сенсорного устройства слежения за передвижением поезда по перегону, дополнительный выход которого соединен с первым входом блока формирования данных о местоположении вагонов поезда, выход и второй вход которого соединены соответственно с третьим входом и третьим выходом информационно-управляющего сервера, причем каждое определенное место внешней оболочки волоконно-оптического кабеля, координаты которого известны, механически соединено с рельсом железнодорожного пути посредством элемента, обеспечивающего передачу вибраций, а блок формирования данных о местоположении вагонов поезда состоит из последовательно соединенных модулей предиктора, первого контура адаптации, корректора, идентификатора и второго контура адаптации, выход которого и второй выход модуля идентификатора соединены с соответствующими входами модуля сравнения, при этом вход модуля предиктора, дополнительный вход модуля сравнения и его выход являются соответственно первым входом, вторым входом и выходом блока формирования данных о местоположении вагонов поезда (RU 2727438, B61L 25/02, 21.07.2020).
Известная система позволяет повысить точностные показатели определения местоположения поезда путем использования распределенного чувствительного элемента (ЧЭ) в виде ВОК, каждое определенное место внешней оболочки которого с известными координатами механически соединено с рельсом железнодорожного пути посредством элемента, обеспечивающего передачу вибраций.
Повышение точностных показателей определения местоположения поезда в известном техническом решении основано на внесении предыскажений в формируемую распределенным датчиком на основе ВОК групповой виброакустической волны, создаваемой множеством колёсных пар поезда при движении подвижного состава. Соединение внешней оболочки ВОК с рельсом в местах расположения объектов железнодорожной инфраструктуры с известными координатами (опор контактной электрической сети, мачт, светофоров) получило название механических «маркеров». В этом случае за счёт обеспечения непосредственной передачи вибрационных воздействий от рельса на распределенный датчик, чувствительным элементом которого является ВОК, в групповой волне появляется доминирующая составляющая, превышающая все другие по мощности. В результате этого, повышают точность идентификации воздействий, оказываемых каждой из колесных пар, при прохождении ими места установки механического «маркера». Без использования маркера из-за хаотичного эффекта наложения различных волн, создаваемых отдельными колесными парами поезда, точный подсчёт их количества и определения на этой основе длины поезда становится проблематичным.
Однако сам механический маркер не является источником дополнительных измерений: он является простейшим примером внесения предыскажений в поступающую на вход рефлектометра групповую виброакустическую волну.
Также в известном техническом решении не учитывается влияние нестабильностей коэффициентов передачи в тракте преобразования виброакустического воздействия в оптические сигналы из-за влияния на характеристики оптоволокна переменных климатических факторов и отклонений от проектных значений реальных расстояний участков оптоволоконного кабеля от соответствующих контролируемых ими участков рельсового пути. В результате чего, в известной системе границы и параметры движения поезда определяются с большой погрешностью.
Технический результат предлагаемого изобретения в части системы виброакустических измерений заключается в расширении функциональных возможностей системы и в повышении точности измерений.
Технический результат достигается тем, что система виброакустических измерений содержит чувствительный элемент в виде проложенного в грунте на заданном расстоянии от железнодорожного пути одномодового волоконно-оптического кабеля с волоконно-оптическими сенсорами, каждый из которых выполнен из самого кабеля в виде петель, собранных в катушки, или из одномодового волоконно-оптического кабеля в виде петель, собранных в катушки, и снабженного оптической муфтой для соединения с волоконно-оптическим кабелем, при этом сенсоры установлены на расстоянии друг от друга, одна сторона волоконно-оптического кабеля выполнена с герметичной заглушкой, а другая сторона подключена к входу/выходу рефлектометра, другой вход/выход которого соединен с выходом/входом блока обработки, причем место укладки сенсоров в грунт привязано к координатной системе железнодорожного пути, количество метров кабеля для формирования каждого сенсора, диаметр его петель и их количество, а также глубину укладки каждого сенсора в грунт предварительно определяют с учетом характеристик грунта.
Технический результат в части системы для контроля местоположения поезда заключается в повышении точности и достоверности определения местоположении поезда, его длины, скорости движения и целостности за счет использования в качестве функционального дополнения (ФДВОК) к распределённой системе волоконно-оптических измерений волоконно-оптических сенсоров (ВОС), а также за счет создания комплексированной системы измерений, при которой данные спутниковых радионавигационных систем (СРНС) используют для решения метрологической аттестации результатов ВОИ.
Известно, что все базовые системы измерений, использующие различные физические принципы измерений, должны развиваться по следующим направлениям: 1) создания функционального дополнения (ФДi); 2) комплексирования полученных результатов измерений (ГЛОНАСС. Принципы построения и функционирования /Под ред. А.И.Перова, В.Н.Харисова. Изд. 4-е перераб. и доп. – М.: Радиотехника, 2010, 800 с.).
В настоящее время функциональное дополнение к спутниковой радионавигационной системе (ФДСРНС) представлено корректирующими дифференцирующими станциями (КС), обеспечивающими реализацию дифференциального режима определения местоположения подвижного состава. Однако применение на железной дороге навигационного дифференциального режима СРНС (SBAS в международной терминологии) не позволяет решать такие задачи как:
- однозначное определение пути, на котором находится ПС;
- определение расстояния до объекта пути или железнодорожной инфраструктуры с точностью и достоверностью, которая требуется при переходе к интервальному режиму регулирования движения ПС;
- прогноз изменения пространственного положения объектов, отслеживаемых системой технического зрения беспилотного ПС;
- отсутствие возможности определения длины ПС и его целостности.
Также известны такие общие недостатки применения технологий СРНС на железной дороге, как:
- низкие показатели помехозащищённости СРНС, которые усугубляются крайне высоким уровнем электромагнитных помех при движении ПС на электрифицированных участках железной дороге, при этом повышение скорости ПС сопровождается значительным его повышением, что приводит к дополнительным ограничениям при использовании сигналов СРНС;
- необходимость увеличения минимального числа навигационных космических аппаратов (НКА), находящихся в зоне радиовидимости с 4 до 6, невозможность уверенного приема сигналов СРНС в зонах плотной городской застройки, под мостами и в тоннелях;
- уменьшение корректирующей способности дифференциального режима спутниковой радионавигации при увеличении расстояния между КС и ПС, что приводит к необходимости значительного увеличения их количества при переходе к интервальному режиму регулирования движения поездов и переходе к использованию беспилотных ПС.
Используемая система виброакустических измерений в предлагаемой системе контроля местоположения поезд практически не чувствительна к электромагнитных помехам, уровень которых на железной дороге чрезвычайно высок. Но у неё есть другие недостатки, которых нет у СРНС. Например, такие как: невысокая пространственная разрешающей способность (от 2 до 10 м), возникновение зон пониженной чувствительности распределенного датчика за счёт случайного распределения вдоль волокна фазы оптического импульса, высокая восприимчивость к воздействию шумов от сторонних источников антропогенного/техногенного характера.
В предлагаемом изобретении функции такого функционального дополнения (ФДВОК) выполняет волоконно-оптический сенсор (ВОС).
Технический результат в части системы определения местоположения поезда достигается тем, что система для контроля местоположения поезда, характеризующаяся тем, что содержит бортовые приемники спутниковой навигации, установленные в голове и в хвосте поезда, выходы которых через блок привязки географических координат к координатам железнодорожного пути подключены к соответствующим входам бортового контроллера, вход и выход которого соединены соответственно с выходом и входом локомотивной радиостанции, и установленные в центре управления информационно-управляющий сервер, соответствующие входы/выходы которого подключены к выходам/входам блока формирования данных о местоположении поезда, стационарной радиостанции и центрального процессора системы электрической централизации, а также систему виброакустических измерений, которая включает чувствительный элемент в виде проложенного в грунте на заданном расстоянии от железнодорожного пути одномодового волоконно-оптического кабеля с волоконно-оптическими сенсорами, каждый из которых выполнен из самого кабеля в виде петель, собранных в катушки, или из одномодового волоконно-оптического кабеля в виде петель, собранных в катушки, и снабженного оптической муфтой для соединения с волоконно-оптическим кабелем, при этом сенсоры установлены на расстоянии друг от друга, одна сторона волоконно-оптического кабеля выполнена с герметичной заглушкой, а другая сторона подключена к входу/выходу рефлектометра, другой вход/выход которого соединен с выходом/входом блока обработки, причем место укладки сенсоров в грунт привязано к координатной системе железнодорожного пути, количество метров кабеля для формирования каждого сенсора, диаметр его петель и их количество, а также глубину укладки каждого сенсора в грунт предварительно определяют с учетом характеристик грунта, при этом рефлектометр и блок обработки системы виброакустических измерений установлены в центре управления, другой вход/выход блока формирования данных о местоположении поезда подключен к другому выходу/входу блока обработки.
При этом часть волоконно-оптических сенсоров системы виброакустических измерений могут быть установлены рядом с проводниками заземления опор линии продольного энергоснабжения на рельсы, а оболочка волоконно-оптического кабеля механически соединена с проводниками или рядом с рельсовыми стыковыми соединениями.
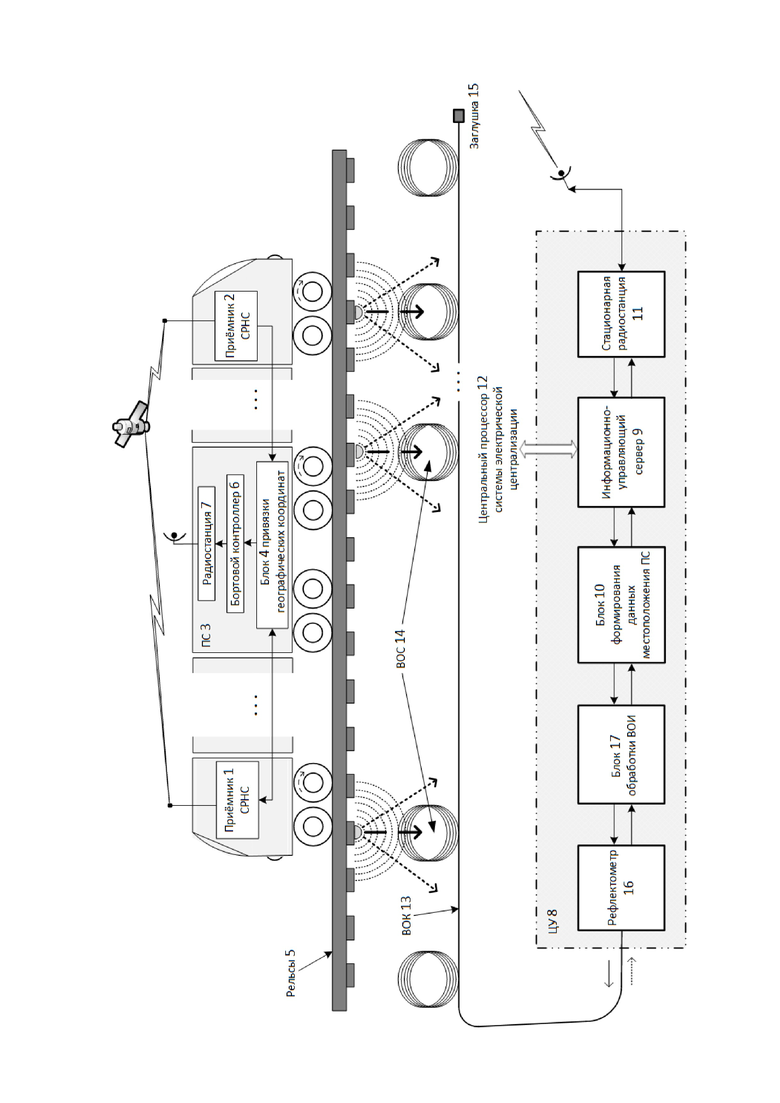
Сущность изобретения поясняется чертежом, на котором представлена структурная схема системы контроля местоположения поезда, включающая структурную схемой систему виброакустических измерений.
Система контроля местоположения поезда содержит бортовые приемники 1 и 2 спутниковой навигации (СРНС), установленные в голове и в хвосте поезда 3 (ПС 3), выходы которых через блок 4 привязки географических координат к координатам железнодорожного пути 5 подключены к соответствующим входам бортового контроллера 6, вход и выход которого соединены соответственно с выходом и входом локомотивной радиостанции 7, и установленные в центре 8 управления (ЦУ 8) информационно-управляющий сервер 9, соответствующие входы/выходы которого подключены к выходам/входам блока 10 формирования данных о местоположении поезда, стационарной радиостанции 11 и центрального процессора 12 системы электрической централизации, а также систему виброакустических измерений, содержащую чувствительный элемент в виде проложенного в грунте на заданном расстоянии от железнодорожного пути 5 одномодового волоконно-оптического кабеля 13 (ВОК 13) с волоконно-оптическими сенсорами 14 (ВОС 14), выполненными из самого кабеля 13 в виде петель, собранных в катушки или из одномодового волоконно-оптического кабеля в виде петель, собранных в катушки, и снабженного оптической муфтой для соединения с ВОК 13.
При этом ВОС 14 установлены на расстоянии друг от друга, одна сторона ВОК 13 выполнена с герметичной заглушкой 15, а другая сторона подключена к входу/выходу рефлектометра 16, другой вход/выход которого соединен с выходом/входом блока 17 обработки.
Место укладки сенсоров 14 в грунт привязано к координатной системе железнодорожного пути 5, количество метров кабеля для формирования каждого сенсора 14, диаметр его петель и их количество, а также глубину укладки каждого сенсора 14 в грунт предварительно определяют с учетом характеристик грунта.
Рефлектометр 16 и блок 17 обработки системы виброакустических измерений установлены в центре 8 управления.
Блок 10 формирования данных о местоположении поезда другим входом/выходом подключен к другому выходу/входу блока 17 обработки.
Система контроля местоположения поездов функционирует следующим образом.
Местоположение ПС 3 на рельсах железнодорожного пути 5 обнаруживается локационным методом, осуществляемым установленным в центре управления 8 рефлектометром 16.
Оптический модуль когерентного рефлектометра 16 осуществляет прямое излучение оптических импульсов в ВОК 13 и приём обратно отражённого излучения, которое регистрирует фотодетектор рефлектометра 16 (на чертеже не показан).
При движении подвижного состава 3 колёсные пары оказывают вибрационное воздействие через рельсошпальную решетку и грунтовую насыпь железнодорожного полотна посредством распространяющейся рэлеевской волны на распределённый ВОК 13, дополненный установленными в требуемом количестве и в заданных местах дополнительными петлевыми сенсорами 14.
Распространение виброакустической волны оказывает посредством сейсмических волн воздействие на точечный ВОС 14. Результат воздействия сейсмических волн на ВОС 14 вследствие расположения в одном месте множества участков ВОК 13, представленных петлями от 1 до N, свёрнутых в катушку (в бухту), заключается в том, что они оказывают приблизительно равное воздействие на каждый участок, представленный петлей, что сопровождается фактом усиления сигнала, формируемого рефлектометром 16.
При этом включение ВОС 14, выполненных из самого ВОК 13 в виде петель, собранных в катушки и расположенных на расстоянии друг от друга, обеспечивает также расширение возможности изменения пространственного разрешения в петлевом датчике, определяемое на основе следующей формулы:
где 
Т - длительность импульса оптического излучения рефлектометра;
С - скорость света (3×108 м/сек);
n = 1,5 - показатель преломления оптического излучения.
Кроме того, диаметр петель ВОС 14 и их количество, а также глубину укладки каждого ВОС 14 в грунт для получения нужного отклика подбирают при калибровке метрологической аттестации системы виброакустического измерения.
Результирующий сигнал с выхода рефлектометра 16 в виде рефлектограммы распределения вибрационного воздействия по всей длине ВОК 13 поступает в блок 17 обработки, осуществляющий первичную математическую обработку, цель которой заключается в очищении сигнала рефлектометра 16 от помех.
Результаты первичной обработки блок 17 передает в блок 10 для формирования данных о местоположении поезда. Блок 10 на основе анализа полученных данных рефлектограмм, очищенных от помех, с учетом координат места укладки оптоволоконных сенсоров 14 в режиме реального времени определяет местоположение поезда, скорость, направление движения и его целостность, информацию о которых направляет на информационно-управляющий сервер 9.
При этом в режиме реального времени навигационные приемники 1 и 2 спутниковой радионавигационной системы ГЛОНАС/GPS определяют соответственно географические координаты головы и хвоста поезда, которые блок 4 привязывает к координатной системе железнодорожного пути 5 и передает их в бортовой контроллер 6. Бортовой контроллер 6 на основе данных о координатной системе железнодорожного пути 5, хранящегося в памяти, определяет местоположение поезда и его параметры, информацию о которых через бортовую радиостанцию 7 по радиоканалу передает на стационарную радиостанцию 11. Информацию о местоположении поезда и его параметрах радиостанция 11 передает в информационно-управляющий сервер 9.
Информационно-управляющий сервер 9 проводит комплексную обработку путем анализа полученных данных, уточняет результаты измерения длины поезда, скорости движения и его целостности, формирует информационное сообщение, включающие информацию о местоположении поезда и о его характеристиках, и передает его центральному процессору системы 12 электрической централизации систему
При этом в результате анализа данных сервер 9 формирует оценки практической метрологической аттестации всех средств измерений и навигационных определений, а также формирует отношения предпочтения. Например, при нахождении поезда в местах густой городской застройки, на железнодорожных мостах и в тоннелях предпочтение отдает результатам определения местоположения поезда и его параметров по данным системы виброакустических измерений.
В то же время результаты определения местоположения поезда и его параметров на основе определений спутниковой навигационной системы, полученные на прямолинейных участках железнодорожного пути в условиях, характеризующихся высоким отношением сигнал/шум, использует для метрологической аттестации волоконно-оптических измерений и калибровки рефлектометра 16.
На основании уточнённых данных, а также информации, переданной от центрального процессора системы 12 электрической централизации, сервер 9 формирует управляющие команды по движению поезда. Сформированные команды с соответствующего выхода сервера 9 поступают в стационарную радиостанцию 11 для передачи по радиоканалу на бортовую радиостанцию 7. С выхода бортовой радиостанции 7 управляющие команды по движению поезда поступают в бортовой контроллер 6, который обеспечивает их отображение на информационном табло машиниста (на чертеже не показано) для принятия решений по управлению поезда.
Таким образом, предлагаемая система контроля местоположения поезда на основе системы виброакустических измерений повышает точность и достоверность определения местоположении поезда, его длины, скорости движения и целостности, что позволяет обеспечить безопасность движения поездов на перегоне.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПЕРАТИВНОГО КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ЕГО СКОРОСТИ И ЦЕЛОСТНОСТИ | 2021 |
|
RU2794238C1 |
| СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОЕЗДА | 2014 |
|
RU2560227C1 |
| Система для управления движением поездов | 2021 |
|
RU2766016C1 |
| Система контроля местоположения поезда | 2017 |
|
RU2659913C1 |
| Система контроля местоположения поездов | 2019 |
|
RU2727438C1 |
| Система контроля местоположения поезда | 2018 |
|
RU2675041C1 |
| Система контроля местоположения поезда на станции | 2020 |
|
RU2737811C1 |
| Система контроля дефектов колёсных пар подвижного железнодорожного состава | 2023 |
|
RU2818020C1 |
| Система контроля схода подвижного состава | 2023 |
|
RU2807011C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СИСТЕМОЙ АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИИ | 2019 |
|
RU2732685C1 |
Изобретение относится к измерительной технике на железнодорожном транспорте. Технический результат заключается в повышении точности определения местоположения поезда. Система виброакустических измерений содержит чувствительный элемент в виде проложенного в грунте на заданном расстоянии от железнодорожного пути одномодового волоконно-оптического кабеля с волоконно-оптическими сенсорами, каждый из которых выполнен из самого кабеля в виде петель, собранных в катушки, или из одномодового волоконно-оптического кабеля в виде петель, собранных в катушки, и снабженного оптической муфтой для соединения с волоконно-оптическим кабелем, при этом сенсоры установлены на расстоянии друг от друга, одна сторона волоконно-оптического кабеля выполнена с герметичной заглушкой, а другая сторона подключена к входу/выходу рефлектометра, другой вход/выход которого соединен с выходом/входом блока обработки, причем место укладки сенсоров в грунт привязано к координатной системе железнодорожного пути. Система для контроля местоположения поезда содержит бортовые приемники спутниковой навигации, установленные в голове и в хвосте поезда, выходы которых через блок привязки географических координат к координатам железнодорожного пути подключены к соответствующим входам бортового контроллера, вход и выход которого соединены соответственно с выходом и входом локомотивной радиостанции, и установленные в центре управления информационно-управляющий сервер, соответствующие входы/выходы которого подключены к выходам/входам блока формирования данных о местоположении поезда, стационарной радиостанции и центрального процессора системы электрической централизации, а также систему виброакустических измерений, рефлектометр и блок обработки которого установлены в центре управления, при этом другой вход/выход блока обработки подключен к другому выходу/входу блока формирования данных о местоположении поезда. 2 н. и 2 з.п. ф-лы, 1 ил.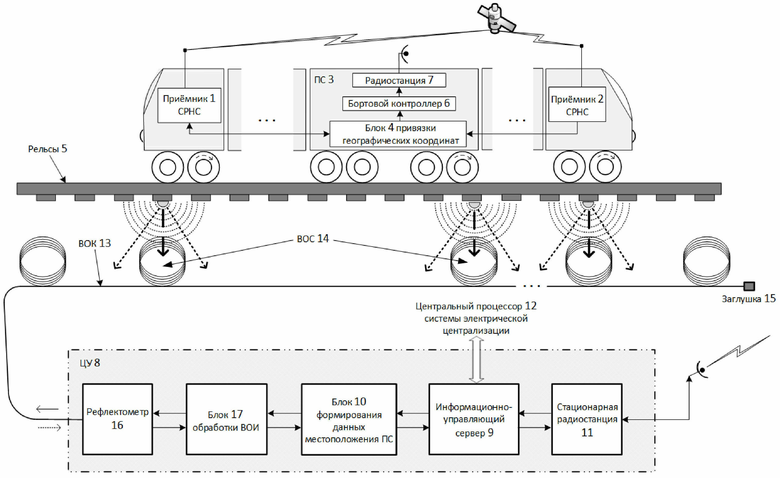
1. Система виброакустических измерений, характеризующаяся тем, что содержит чувствительный элемент в виде проложенного в грунте на заданном расстоянии от железнодорожного пути одномодового волоконно-оптического кабеля с волоконно-оптическими сенсорами, каждый из которых выполнен из самого кабеля в виде петель, собранных в катушки, или из одномодового волоконно-оптического кабеля в виде петель, собранных в катушки, и снабженного оптической муфтой для соединения с волоконно-оптическим кабелем, при этом сенсоры установлены на расстоянии друг от друга, одна сторона волоконно-оптического кабеля выполнена с герметичной заглушкой, а другая сторона подключена к входу/выходу рефлектометра, другой вход/выход которого соединен с выходом/входом блока обработки, причем место укладки сенсоров в грунт привязано к координатной системе железнодорожного пути, количество метров кабеля для формирования каждого сенсора, диаметр его петель и их количество, а также глубину укладки каждого сенсора в грунт предварительно определяют с учетом характеристик грунта.
2. Система для контроля местоположения поезда, характеризующаяся тем, что содержит бортовые приемники спутниковой навигации, установленные в голове и в хвосте поезда, выходы которых через блок привязки географических координат к координатам железнодорожного пути подключены к соответствующим входам бортового контроллера, вход и выход которого соединены соответственно с выходом и входом локомотивной радиостанции, и установленные в центре управления информационно-управляющий сервер, соответствующие входы/выходы которого подключены к выходам/входам блока формирования данных о местоположении поезда, стационарной радиостанции и центрального процессора системы электрической централизации, а также систему виброакустических измерений по п. 1, рефлектометр и блок обработки которой установлены в центре управления, при этом другой вход/выход блока обработки подключен к другому выходу/входу блока формирования данных о местоположении поезда, в памяти которого хранятся координаты места укладки оптоволоконных сенсоров.
3. Система по п. 2, отличающаяся тем, что часть волоконно-оптических сенсоров системы виброакустических измерений установлены рядом с проводниками заземления опор линии продольного энергоснабжения на рельсы, а оболочка волоконно-оптического кабеля механически соединена с проводниками.
4. Система по п. 2, отличающаяся тем, что часть волоконно-оптических сенсоров системы виброакустических измерений установлены рядом с рельсовыми стыковыми соединениями.
| Система контроля местоположения поездов | 2019 |
|
RU2727438C1 |
| Система контроля местоположения поезда | 2017 |
|
RU2659913C1 |
| РАСПРЕДЕЛЕННАЯ ВОЛОКОННО-ОПТИЧЕСКАЯ СИСТЕМА РЕГИСТРАЦИИ ВИБРОАКУСТИЧЕСКИХ СИГНАЛОВ | 2011 |
|
RU2485454C2 |
| Система контроля местоположения поезда | 2018 |
|
RU2675041C1 |
| CN 102806932 A, 05.12.2012 | |||
| CN 103926588 A, 16.07.2014. | |||
