Настоящее изобретение относится к судостроению и может быть использовано на плавсредствах, как на надводных судах (корабли разных типов, паромы и т.д.), плавающих на поверхности моря, так и на подводных судах: подводные лодки, глубоководные аппараты, дроны и т.п.
Известно использование шнековых двигателей (обратимых движителей) в ветроэнергетических установках, например, «Ветродвигатели» автора Смульского И.И. по авторскому свидетельству СССР №1225912, МПК Кл. F03D 5/00 (аналог) [1].
Устройство содержит вал и закрепленные на нем винтовые лопасти, причем вал установлен по направлению потока под углом к горизонтальной плоскости, равным углу наклона винтовой линии лопастей, а угол наклона винтовой линии равен 60…70°.
Преимуществом использования шнека, расположенного под углом в потоке, или шнека, создающего отражаемый от себя поток в режиме движителя, является максимально эффективное использование поверхности каждой винтовой лопасти.
Недостатки данного шнекового двигателя, если его использовать в качестве движителя, выражаются в необходимости устанавливать контррули на судне для удерживания его на курсе, поскольку один шнековый движитель, установленный под углом к продольной оси судна, создает момент на его разворот.
Известно использование двух стационарно установленных шнеков для выработки энергии в гидроэлектростанциях, например, «Бесплотинная шнековая гидроэлектростанция» авторов Попова А.И., Щеклеина С.Е. по патенту на полезную модель РФ №94642, МПК F03D 5/00; F03B 17/00 (аналог) [2].
Данное устройство содержит валы с закрепленными на них винтовыми лопастями, образующими одно- или многозаходные шнеки, которые расположены под углом к потоку, причем взаимное расположение валов, размещаемых также под углом друг к другу, образует в пространстве подобие буквы «V», что позволяет максимально использовать энергию потока обоими шнеками.
Недостатком данного устройства является невозможность использовать его напрямую без дополнительных узлов и агрегатов в качестве движителей плавсредств.
В учебном пособии автора Антоненко С.В. «Судовые движители», из-во ДВГТУ, Владивосток, 2007, [3], на странице 5 указано: «… В 1752 г. винт в виде двухзаходного червяка предложил Д. Бернулли, но КПД такого движителя оказался невелик. Как указывают в литературе - случай помог усовершенствовать конструкцию винта: одно судно, оборудованное деревянным винтом, коснулось им грунта, значительная часть винта отломилась и, к удивлению экипажа судна, оно увеличило ход».
Недостаток этой конструкции заключается в том, что полностью погруженный в воду шнек, расположенный вдоль оси судна, работает не эффективно, так как нагрузку воспринимает в основном первая ближайшая к двигателю лопасть, а остальные, находящиеся за ней «в тени», крутятся практически вхолостую.
Известно также «Судно с частично погруженным шнековым движителем» авторов Завьялова В.М., Георгиевской Е.П. и др. по патенту РФ №2117602, МПК В63В 35/0, В63Н 5/00; В63Н 1/02 (аналог) [4].
Данное устройство содержит два симметричных относительно диаметральной плоскости судна частично погруженных шнека с непараллельными осями вращения, каждый из которых включает, по меньшей мере, одну спиральную лопасть, навитую на ступице, связанной с приводом через редуктор. Шнеки и привод установлены за местом пересечения кормового среза и днища судна в районе ватерлинии на транцевых плитах. Ось вращения каждого шнека составляет с диаметральной плоскостью судна фиксированный (закрепленный в конструкции судна) угол, равный шаговому углу навивки на половине ее высоты и уменьшенный на 5…10°. Движение данного судна осуществляется только за счет погруженной части лопастей. Подобная конструкция позволяет свободно проходить через гидравлическое сечение работающего движителя битому льду, водорослям и другому мусору.
Недостатками данного изобретения являются незначительная скорость хода, невысокая маневренность судна из-за фиксированного крепления обоих концов шнеков на судне относительно диаметральной плоскости судна и невозможности взаимного перемещения их относительно друг к другу.
Кроме того, в зависимости от степени загрузки судна необходимо регулировать положение шнеков по отношению к ватерлинии плавсредства.
Также техническое решение по патенту №2117602 не является универсальным для его использования на подводных лодках и на судах с высокой маневренностью при работе в акваториях портов.
Задачей предлагаемого изобретения является создание универсального шнекового движителя, который может быть использован на плавсредствах разного назначения, в том числе на подводных судах и аппаратах.
Технический результат предлагаемого изобретения заключается в следующем:
- повышен КПД движителя и, соответственно, скорость хода плавсредства за счет создания возможности перемещать шнеки относительно друг друга и одновременно относительно оси диаметральной плоскости судна;
- увеличена маневренность плавсредства за счет того, что только один конец каждого шнека закреплен в реверсивных мотор-редукторах и при их одновременных смещениях на одну из сторон плавсредства предоставляется возможность осуществлять поворот или круговой разворот с минимальным выбегом плавсредства;
- уменьшен эффект «засасывания» корпуса судна струей гребного винта за счет удаленного расположения винтовых лопастей шнековых движителей от корпуса;
- уменьшена циркуляция, т.е. величина выдвига судна, что обеспечивается согласованной работой шнеков при маневре судна и одновременным или по выбору включением реверса одним из шнеков;
- отсутствие в необходимости дополнительных подруливающих устройств;
- исключение кавитации и явлений, с нею связанных, за счет уменьшения числа оборотов шнеков, отбрасывающих несколькими винтовыми лопастями ту же массу воды и создающих ту же тягу, что и сравнимый по мощности винтовой движитель, но имеющий гораздо большие и критичные к кавитации обороты.
Технический результат достигается за счет того, что в движитель для плавсредства в варианте надводного судна, содержащий два шнека по обе стороны от его диаметральной плоскости, каждый из которых включает, по крайней мере, одну спиральную лопасть, навитую на ступице, связанной через редуктор с приводами, расположенными на кормовом срезе судна, введены транцевая плита с установленными на ней на своих осях левым и правым реверсивными мотор-редукторами, соединенными с передними по ходу плавсредства концами ступиц шнеков, и два дополнительных мотор-редуктора, подключенных к реверсивным мотор-редукторам и управляющих их разворотом, причем все мотор-редукторы подключены через блок управления приводами к центральной системе управления плавсредством.
Технический результат в варианте для подводного судна достигается дополнительно за счет того, что по бортам судна установлены опоры, через которые перпендикулярно оси диаметральной плоскости пропущена поворотная ось, прикрепленная к транцевой плите, имеющей возможность поворачиваться в вертикальной плоскости посредством дополнительного мотор-редуктора, установленного на поворотной оси и подключенного через блок управления приводами к центральной системе управления судном.
Технический результат также достигается за счет выполнения винтовых лопастей воронкообразными, которые более эффективно захватывают и отбрасывают массу воды.
В результате поиска по источникам патентной и научно-технической информации совокупность признаков, характеризующая описываемый «V-образно спаренный шнековый движитель для плавсредств (Варианты)», не обнаружена. Таким образом, по мнению авторов, предлагаемое техническое решение соответствует критерию «новое».
На основании сравнительного анализа предложенного технического решения с известным уровнем техники можно утверждать, что между совокупностью отличительных признаков, выполняемых ими функций и достигаемой задачи предложенное техническое решение не следует явным образом из уровня техники и соответствует по нашему мнению критерию охраноспособности «изобретательский уровень».
На чертежах приведены конструкции предлагаемых движителей и схемы их работы.
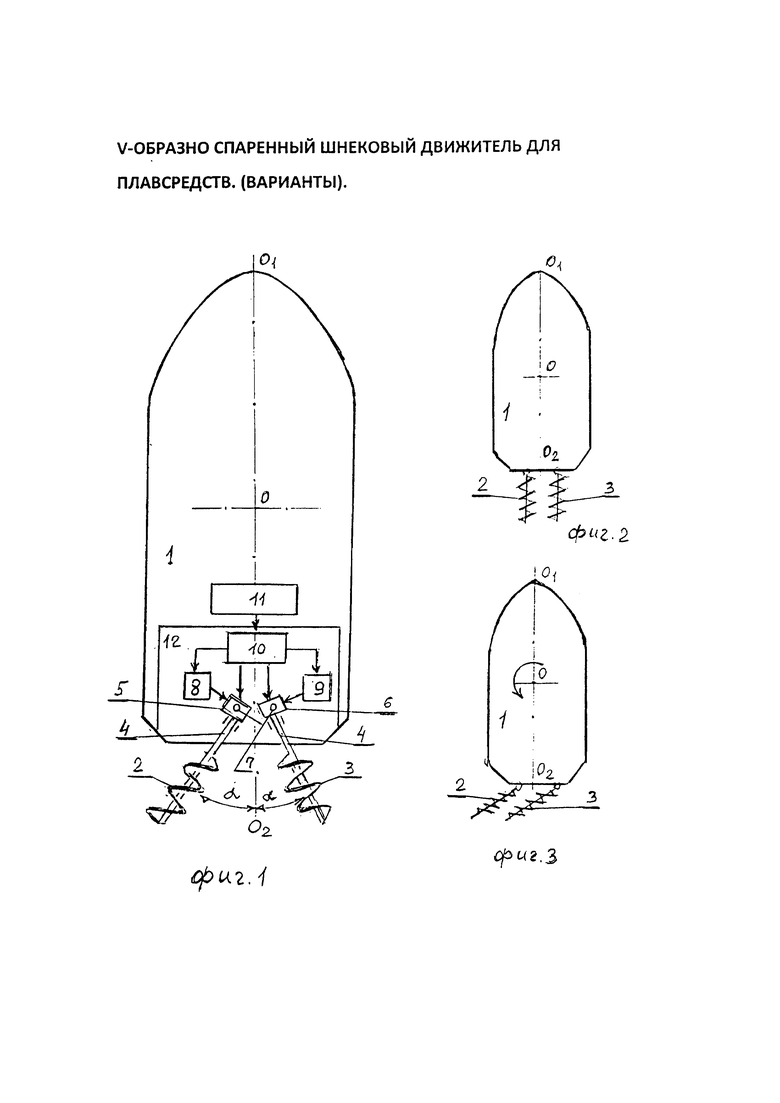
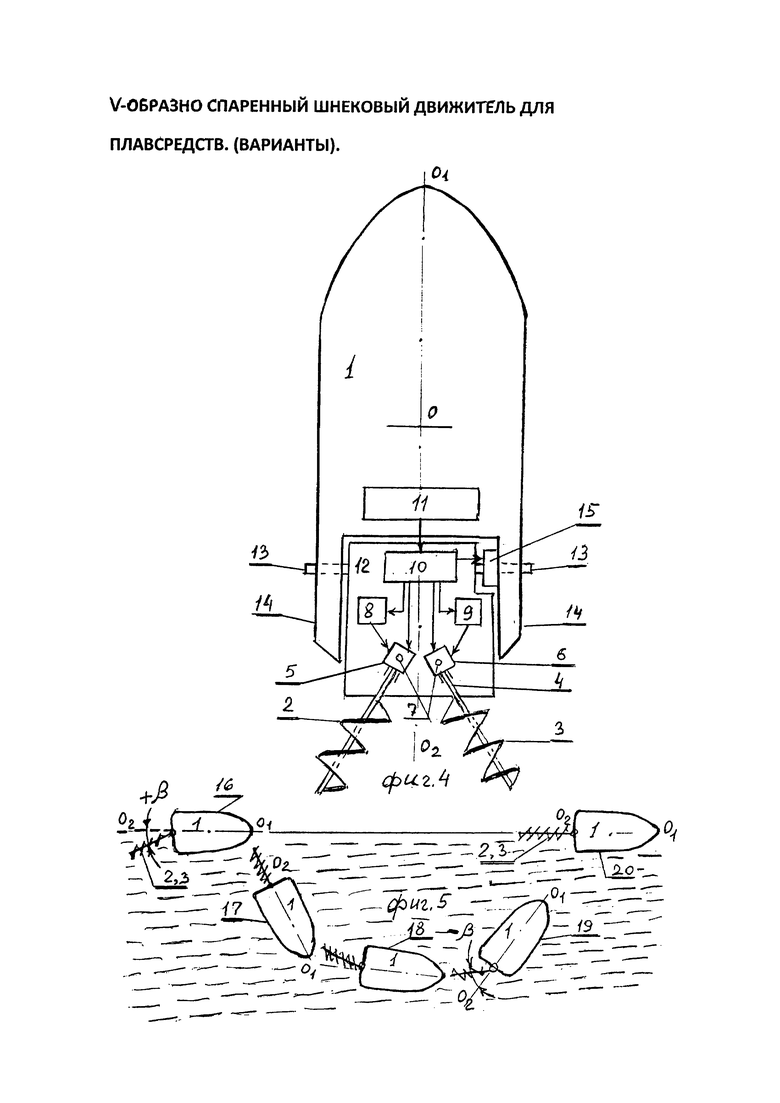
На фиг. 1 изображен вариант (вид сверху) надводного плавсредства со шнековыми движителями в рабочем положении, расположенными на кормовом срезе дна судна, на фиг. 2 и на фиг. 3 представлены схематично варианты расположения шнековых движителей при изменении скорости хода и при повороте судна. На фиг. 4 изображен вариант (вид сверху) универсального судна для подводного и надводного плавания с вариантом его ускоренного погружения, перемещения под водой в разных плоскостях и ускоренным всплытием. На фиг. 5 схематично показаны изменения угловых положений шнековых движителей при маневрах подводного судна (подводной лодки) в подводном и надводном положениях.
На кормовом срезе дна плавсредства (судна) 1 установлены левый и правый шнековые движители 2, 3 (шнеки) с заданной круткой лопастей, присоединенные ступицами 4 соответственно к выходам левого и правого реверсивных мотор-редукторов 5, 6 скорости и реверса направления оборотов (далее по тексту: мотор-редукторы скорости и реверса) с центрами их поворота вокруг своей вертикальной оси 7, осуществляемых дополнительными левым и правым реверсивными мотор-редукторами 8, 9 углового положения шнеков (далее по тексту: мотор-редукторы углового положения шнеков), подключенными так же, как и мотор-редукторы скорости и реверса, к электрической сети блока 10 управления приводами мотор-редукторов, который соединен с центральной системой 11 управления судном, причем мотор-редукторы установлены в корме судна на транцевой плите 12.
В варианте подводного судна (фиг. 4) на подвижной с возможностью поворота транцевой плите закреплена ее ось 13, поворачивающаяся в дополнительных боковых опорах 14, расположенных в корме по обоим бортам судна.
На одной из боковых опор прикреплен соединенный с осью плиты реверсивный мотор-редуктор 15 углового поворота транцевой плиты, который также подключен через блок управления приводами к центральной системе управления подводного судна, например подводной лодки.
«V-образно спаренный шнековый движитель для плавсредств (Варианты)» работает следующим образом.
По командам центральной системы 11 управления плавсредством на блок 10 управления приводами задается число оборотов (скорость) и направление вращения шнеков 2, 3 от мотор-редукторов 5, 6, а также их взаимное расположение относительно оси «O1-О2» плавсредства (фиг. 1), которое задается дополнительными мотор-редукторами 8, 9 углового положения шнеков, поворачивающих на осях 7 мотор-редукторы 5, 6 со шнеками на заданный системой управления угол «±α».
Движение надводного плавсредства (судна) 1 вперед или назад осуществляется одновременным согласованным вращением левого и правого шнековых движителей 2, 3, расположенных на одинаковых оптимальных углах «±α» от центральной оси «О1-О2» (фиг. 1) в диаметральной плоскости судна. Изменение скорости судна может осуществляться по командам центральной системы 11 управления судном через блок 10 управления приводами движения на мотор-редукторы 5 и 6 шнековых движителей, например, с помощью частотно-регулируемого привода или путем независимого изменения углов «±α» относительно центральной оси «O1-О2» для каждого шнека.
С помощью дополнительных мотор-редукторов 8, 9 для поворота мотор-редукторов 5 и 6 вокруг их вертикальных осей 7 возможно раздельно устанавливать углы поворота шнеков в обе стороны относительно центральной оси «O1-О2» на углы в пределах от -60…80° до +60…80°.
При одинаковых оборотах шнековых движителей 2, 3 минимальная скорость судна 1 будет, когда оси движителей расположены параллельно центральной оси «O1-O2», т.е. углы α=0 (фиг. 2), а максимальная скорость в зависимости от конструктивных особенностей шнековых движителей будет при углах α=40…65°.
По сравнению с винтом-движителем пропеллерного типа следует ожидать при тех же оборотах большую тягу и скорость от шнековых движителей за счет получения большей эффективности от увеличения ометаемой поверхности (площади) движителей. Например, два шестилопастных (шесть витков), расположенных под углами ±45° к центральной оси «O1-О2», эквивалентны трем пропеллерным винтам, разнесенным в пространстве, каждый из которых захватывает и опирается на свою часть водной среды.
Таким образом используется эффект увеличения тяги при уменьшении величины напора в ометаемой движителями аэродинамической плоскости.
«V-образно спаренный шнековый движитель для плавсредств (Варианты)» в большей степени соответствует теории идеального движителя. В литературе [5] на стр. 54 указывается: «…В этой теории считаются заданными плотность жидкости, скорость поступательного движения, упор или тяга и площадь гидравлического сечения…». Таким образом, в предлагаемой конструкции за счет увеличения площади ометания гидравлического сечения представляется возможность увеличить упор и, соответственно, тягу и скорость судна. Понятно, что увеличение с этой же целью диаметра и габаритов типового винта имеет конструктивные ограничения.
Поворот судна в любую сторону по горизонтали может осуществляться остановкой или замедлением оборотов одного из движителей и работе другого при перемещении его на заданный угол. Более крутой поворот судна может быть осуществлен, если другому остановленному шнеку придать реверсивное вращение. На фиг. 3 показан вариант ускоренного разворота судна 1, когда оба шнековых движителя 2, 3 сдвинуты в одну сторону от центральной оси «O1-О2» и имеют согласованные направления вращения. Если этим же движителям сообщить реверсивное вращение, разворот судна будет производиться в противоположную сторону. Аналогично при реверсивном вращении движение судна может осуществляться задним ходом прямо либо с поворотами.
При причаливании бортом один ближний шнековый движитель устанавливается параллельно причалу, а маневрирование с помощью реверса осуществляется другим шнековым движителем.
Таким образом, перечисленные манипуляции с взаимным расположением шнековых движителей, диапазонами их оборотов и направлениями вращения создают надводному судну не только высокую скорость, но и маневренность в горизонтальной плоскости.
На фиг. 4 и 5 схематично показаны варианты перемещения подводных судов (аппаратов и подводных лодок) в вертикальной плоскости для их быстрого погружения или всплытия, а также для маневрирования на глубине в горизонтальной плоскости.
По команде (фиг. 4) центральной системы 11 управления судном через блок 10 управления мотор-редукторами на реверсивный мотор-редуктор 15 углового положения плиты поступает сигнал на ее поворот в вертикальной плоскости, при этом связанная с мотор-редуктором ось 13 поворачивает (наклоняет на заданный угол) транцевую плиту 12 в боковых опорах 14, например, книзу (фиг. 5, позиция 16) по ходу движения судна таким образом, чтобы оси ступиц 4 шнековых движителей 2, 3 были расположены под некоторым углом «+β» по вертикали относительно оси «O1-O2» судна. В этом случае при согласной работе шнековых движителей подводное судно будет уходить на глубину и тем быстрее, чем больше данный угол и больше обороты шнековых движителей 5, 6 (фиг. 5, позиция 17).
При движении в подводном положении по горизонтали угол β=0 и маневры по горизонтали осуществляются так же, как при надводном плавании (фиг. 5, позиция 18). По команде на всплытие транцевая плита 12 поворачивает шнековые движители 2, 3 по ходу движения судна кверху, образуя с горизонтальной осью угол «-β» (фиг. 5, позиция 19), что понуждает подводное судно двигаться в вертикальной плоскости.
Подобные манипуляции позволяют судну (подводной лодке) оперативно уходить от преследования, перемещаясь на глубине на разных высотах и направлениях.
Аппаратура и мотор-редукторы, расположенные на транцевой плите 12 в подводной части судна (фиг. 4), выполняются в герметичном исполнении. В частности, подшипники могут быть изготовлены из бронзы и фторопласта, а смазкой для них является забортная вода по технологии предприятия «Винт» [6].
В зависимости от конкретных требований к характеристикам судна шнеки в шнековых движителях могут быть изготовлены как многозаходные, с переменным шагом и разных диаметров. Наибольший эффект обеспечивают воронкообразные шнековые лопасти [7, 8]. Шнек с воронкообразными спиральными винтообразными лопастями при тех же оборотах более эффективно захватывает и отбрасывает водную массу за счет чего создает более эффективную тягу.
Использование двух или более шнековых движителей, расположенных V-образно по оси плавсредства под углом относительно друг к другу по горизонтали и по вертикали, устраняет ряд технических противоречий, присущих винтам судов [9], обеспечивает усиление маневренности в горизонтальной и в вертикальной плоскостях, позволяет увеличить скорость и плавность хода, исключить кавитацию и другие явления, с нею связанные.
Это поясняется, в частности, следующими доводами.
В работе [10], с. 159, объясняется эффект «засасывания»: «…Вода в струе перед гребным винтом приобретает дополнительную скорость, а давление в ней падает. Следовательно, возрастает сопротивление формы расположенного в этой струе корпуса, несколько увеличивается и сопротивление трения за счет скорости обтекания кормовой оконечности судна…».
И далее, там же [10], на с. 161 «…Единственный путь в этом направлении - отдаление винта корпуса, при этом коэффициент попутного потока практически не меняется, а коэффициент засасывания интенсивно убывает…»
В этой связи следует ожидать от предлагаемого V-образного движителя, лопасти которого пространственно удалены, значительного снижения данного эффекта и увеличения тяги (скорости) плавсредства.
При оценке маневренности следует учитывать также параметр «выбега» судна. В работе [10], с. 192 указывается: «…Основные характеристики маневровых качеств судна при реверсе: время и путь выбега - расстояние, проходимое судном до полной остановки…». Аналогично, в работе [5], с. 272 поясняется: «…маневренные качества судна при реверсе принято оценивать длиной и временем выбега пути судна от начала реверса до полной остановки и временем прохождения этого пути…».
В предлагаемом изобретении уменьшение пути и времени выбега обеспечивается не только реверсом при увеличении оборотов шнеков, но и их оптимальными углами взаимного расположения и расположения относительно диаметральной плоскости судна «O1-O2».
Важным параметром судов является их циркуляция. В работе [10], с. 235 указано: «…элементы циркуляции зависят от угла перекладки руля… и имеют практическое значение, т.к. величину выдвига необходимо знать при отворачивании от берега или другого препятствия, прямое смещение нужно учитывать при расхождении судов, а тактический диаметр циркуляции - при маневренности в узкостях…. Важной характеристикой циркуляции является ее период - время, необходимое судну для полного поворота на 360°…».
В предлагаемом изобретении плавсредство имеет возможность развернуться на 360° в горизонтальной плоскости, практически, на месте вокруг центра «О» судна (фиг. 1, фиг. 3). Это обеспечивается, например, при развороте против часовой стрелки (фиг. 3) одновременной работой шнеков 2, 3, отклоненных на максимальный угол в одну сторону, а точная подгонка затем обеспечивается реверсным включением и изменением угла отклонения шнека 3.
Аналогичная операция с одновременным отклонением шнеков 2, 3 в вертикальной (фиг. 5) и в горизонтальной (фиг. 3) плоскостях позволяет подводному судну свободно маневрировать в пространстве, находясь в подводном положении.
Кроме того, предлагаемая конструкция позволяет обходиться на плавсредстве без вспомогательных средств управления: подруливающих устройств, поворотных винтовых колонок или активного руля [11], т.к. данная функция обеспечивается поворотом шнеков в любой плоскости.
Предлагаемая конструкция лишена также такого явления как кавитация. В работе [5], с. 96 указывается, что «…кавитация возникает в тех точках потока, где в результате движения жидкости происходит значительное местное понижение давления…». Таким образом, это происходит при больших оборотах винтовых движителей. Отличие шнековых движителей, отбрасывающих ту же массу воды и создающих ту же тягу, что и сравнимый по мощности винтовой движитель, заключается в том, что они вращаются с гораздо меньшей угловой скоростью. Поскольку сплошная винтовая линия шнека не создает вибраций и шума, это особенно важно для создания малошумных судов и подводных лодок.
Использование шнеков в движителях характеризуется плавностью в работе, отсутствием вибраций, меньшими акустическими и электромагнитными помехами, пониженным экологическим воздействием.
Таким образом, использование предлагаемого шнекового движителя позволяет исключить ряд противоречий при проектировании надводных и подводных судов.
Учитывая изложенное, следует ожидать, что предлагаемый «V-образно спаренный шнековый движитель для плавсредств (Варианты)» найдет применение в судостроении.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Смульский И.И. Ветродвигатель. Авторское свидетельство СССР №1225912, МПК F03D 5/00 (аналог).
2. Попов А.И., Щеклеин С.Е., Попов Д.А. Бесплотинная шнековая гидроэлектростанция. Патент на полезную модель РФ №94642, МПК F03D 5/00, В03В 17/00 (аналог).
3. Антоненко С.В. Судовые движители / С.В. Антоненко. - Владивосток: ДВГТУ, 2007. - С. 5 (аналог).
4. Завьялов В.М., Георгиевская Е.П., Мавлюдов М.А. и др. Судно с частично погруженным шнековым движителем. Патент РФ №2117602, МПК В63В 35/00; В63Н 5/00; В63Н 1/02 (аналог).
5. Артюшков Л.С. и др. Судовые движители / Л.С. Артюшков. - Л., 1988, с. 54.
6. Татьянин О.О. Рулите активнее / О.О. Татьянин // №12, ИР, 2002, с. 10.
7. Смульский И.И. Шнековые движители и их особенности // Инженерно-физический журнал (ИФЖ), Т. 74, №5, с. 190, рис. 4.
8. Смульский И.И. Шнековый ветроротор. Патент РФ №2101560, МПК6 F03D 5/00.
9. Дорогостойский Д.В. Теория и устройство судна / Д.В. Дорогостойский. - Л., 1975, с. 351.
10. Жинкин В.Б. Теория и устройство корабля / В.Б. Жинкин. - Спб, 2000, с. 159.
11. Булгачев Г.Г., Латышев Ю.С и др. Активный руль. Патент РФ №2043266, МПК В63Н25 5/08 (аналог).
12. Патент Японии 61-47758, 21.10.86 (аналог).
13. Патент США №3906888А, 23.09.75 (аналог).
14. Патент Великобритании №1349512, кл. В63Н 1/12, 1974 (аналог).
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВНИКОВЫЙ ЛОПАСТНОЙ ДВИЖИТЕЛЬ ДЛЯ ПЛАВСРЕДСТВ НАДВОДНОГО И ПОДВОДНОГО ПЛАВАНИЯ (ВАРИАНТЫ) | 2016 |
|
RU2622519C1 |
| СПОСОБ РАЗРУШЕНИЯ ЛЕДЯНОГО ПОКРОВА СУДНОМ НА СЖАТОМ ПНЕВМОПОТОКЕ | 2022 |
|
RU2819938C2 |
| СИСТЕМА УПРАВЛЕНИЯ СУДНОМ НА СЖАТОМ ПНЕВМОПОТОКЕ | 2019 |
|
RU2712351C1 |
| Плавучая платформа, совмещенная с малыми судами на сжатом пневмопотоке | 2021 |
|
RU2835223C2 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ-АМФИБИЯ | 2019 |
|
RU2713494C1 |
| АМФИБИЙНОЕ СУДНО НА СЖАТОМ ПНЕВМОПОТОКЕ С ПОГРУЖНЫМ ШНЕКОВЫМ ДВИЖИТЕЛЕМ | 2020 |
|
RU2729314C1 |
| ПОЛУПОГРУЖНОЙ ГРУЗОПАССАЖИРСКИЙ ТАНКЕР | 1992 |
|
RU2043261C1 |
| СУДНО С ЧАСТИЧНО ПОГРУЖЕННЫМ ШНЕКОВЫМ ДВИЖИТЕЛЕМ | 1996 |
|
RU2117602C1 |
| Устройство и способ работы движителя для надводного и подводного транспорта | 2017 |
|
RU2665103C1 |
| Способ движения на "водной подушке" и глиссирующее судно для его осуществления | 2015 |
|
RU2615031C2 |
Изобретение относится к судостроению и может быть использовано на плавсредствах, как на надводных судах, так и на подводных судах. V-образно спаренный шнековый движитель для плавсредств в варианте надводного судна содержит в кормовой части на транцевой плите расположенные под углом шнеки, управляемые мотор-редукторами скорости и направления вращения шнеков. Шнеки совместно с данными мотор-редукторами перемещаются под разными углами в горизонтальной плоскости посредством соединенных с ними дополнительными мотор-редукторами углового положения шнеков. Все мотор-редукторы через блок управления приводами подключены к центральной системе управления надводным судном. В варианте подводного судна транцевая плита с расположенными на ней мотор-редукторами со шнековыми движителями имеет возможность поворачиваться в вертикальной плоскости с помощью закрепленной на ее оси мотор-редуктора углового поворота плиты. Достигается повышение КПД и увеличение скорости хода плавсредства, увеличение маневренности плавсредства и исключение кавитации. 2 н. и 2 з.п. ф-лы, 5 ил.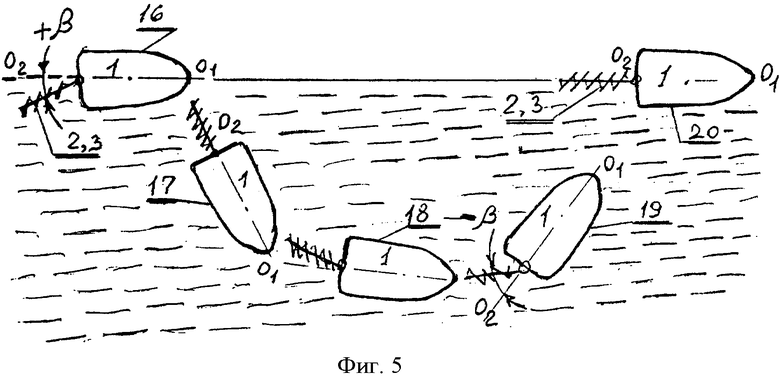
1. V-образно спаренный шнековый движитель для плавсредств надводного типа судна, характеризующийся тем, что он содержит два шнека по обе стороны от его диаметральной плоскости, каждый из которых включает по меньшей мере одну спиральную лопасть, навитую на ступице, связанной с приводом, на кормовом срезе днища судна установлена транцевая плита с размещенными на ней шнеками, левым и правым поворотными на своих осях реверсивными мотор-редукторами скорости и реверса, соединенными с передними по ходу судна концами ступиц шнеков, и два дополнительных левый и правый мотор-редуктора углового положения шнеков, подключенных соответственно к левому и правому редукторам скорости и реверса, обеспечивающим разворот на их осях, причем дополнительные мотор-редукторы углового положения и мотор-редукторы скорости и реверса подключены к блоку управления их приводами, а ступицы шнеков выполнены с возможностью перемещения в горизонтальной плоскости посредством реверсивных мотор-редукторов углового положения шнеков.
2. V-образно спаренный шнековый движитель для плавсредств надводного типа судна по п.1, отличающийся тем, что шнеки выполнены воронкообразными, каждый из которых включает по меньшей мере одну спиральную воронкообразную лопасть.
3. V-образно спаренный шнековый движитель для плавсредств подводного типа судна (подводной лодки), характеризующийся тем, что он содержит два шнека по обе стороны от его диаметральной плоскости, каждый из которых включает по меньшей мере одну спиральную лопасть, навитую на ступице, связанной с приводом, на кормовом срезе днища судна установлена подвижная с возможностью поворота транцевая плита с размещенными на ней шнеками, левым и правым поворотными на своих осях реверсивными мотор-редукторами скорости и реверса, соединенными с передними по ходу судна концами ступиц шнеков, и два дополнительных левый и правый реверсивных мотор-редуктора углового положения шнеков, подключенных соответственно к левому и правому мотор-редукторам скорости и реверса, обеспечивающими разворот на их осях, причем мотор-редукторы углового положения шнеков и мотор-редукторы скорости и реверса подключены к блоку управления их приводами, ступицы шнеков выполнены с возможностью перемещения в горизонтальной плоскости посредством реверсивных мотор-редукторов углового положения шнеков, а по бортам подводного судна установлены дополнительные боковые опоры с поворотной осью, закрепленной с подвижной транцевой плитой и имеющей возможность поворота в вертикальной плоскости посредством дополнительного реверсивного мотор-редуктора поворота плиты, установленного на ее оси и соединенного также с блоком управления приводами.
4. V-образно спаренный шнековый движитель для плавсредств подводного типа судна по п.3, отличающийся тем, что шнеки выполнены воронкообразными, каждый из которых включает по меньшей мере одну спиральную воронкообразную лопасть.
| СУДНО С ЧАСТИЧНО ПОГРУЖЕННЫМ ШНЕКОВЫМ ДВИЖИТЕЛЕМ | 1996 |
|
RU2117602C1 |
| GB 1349512 A, 03.04.1974 | |||
| ШНЕКОВЫЙ ВЕТРОРОТОР | 1996 |
|
RU2101560C1 |

