Настоящее изобретение относится к судостроению и может быть использовано на плавсредствах, как на надводных судах (корабли разных типов, паромы и т.д.), плавающих на поверхности моря, так и на подводных судах: подводные лодки, глубоководные аппараты, дроны и т.п.
Известен «Плавниковый движитель» [1] автора Кузнецова С.А. по патенту РФ №2041129, МПК В63Н 1/36 (аналог), содержащий плавник, профиль продольного сечения которого образован двумя выпуклыми дугами, размещенный в ограждении коробчатой формы и кинематически связанный с кривошипным приводным механизмом, причем плавник жестко связан с продольным ребром, подвижно закрепленным на кулисе и шарнирно соединенным в верхней его части с кривошипом приводного механизма.
Недостатком данного движителя является сложное движение плавника, в результате которого за один оборот кривошипа вытесняется незначительный объем воды, придающий импульсный характер движению судна. Кроме того, данный движитель имеет невысокую механическую надежность из-за наличия пар трения кулиса-ребро и плавник-ограждение, причем между размерами звеньев и сложной кривизной профиля плавника требуется соблюдать оптимальные соотношения.
Известен также «Судовой ленточный движитель» [2] автора Михайлова А.Г. по патенту РФ №2035354, МПК В63Н 1/36 (аналог), содержащий генератор колебаний и ленту, причем лента выполнена из упругого металлического материала, при этом ее передняя часть шарнирно закреплена, а задняя выполнена в виде свободной консоли.
В данном движителе вибратор излучает колебания, которые передаются на ленту и перемещаются дальше по ленте по направлению к ее свободному концу, при этом на воду оказываются волновые сжимающие воздействия.
Недостатком данного устройства является малая энергия, которая может быть передана ленте от вибратора, и, следовательно, невысокая скорость хода судна. Кроме того, движитель имеет невысокую надежность из-за ограниченного числа изгибов - перегибов упругой металлической ленты.
Известен также «Движитель для судов и аппаратов надводного и подводного плавания» [3] автора Семенова Г.А. по патенту РФ №2090441, МПК В63Н 1/36 (аналог), содержащий рабочий орган в виде плавника, установленного с возможностью поперечных колебаний, причем плавник выполнен в виде клиновидно-конусного тела с упругой армированной пластиной на остром конце по форме хвостового плавника рыб, соединенного шарнирно тупым концом с корпусом судна, а рабочий орган выполнен в виде двух клиновидно-конусных тел, установленных в противофазе.
Недостатками данного движителя является его ограниченная мощность, передаваемая поперечными колебаниями водной среды из-за малой опорной поверхности плавника, а также низкая надежность из-за наличия упругой пластины, имеющей незначительное число перегибов относительно осевой линии движителя.
Известны также «Способ движения транспортного средства и устройство «рыбий хвост» для его осуществления» [4] авторов Лозовского Л.А., Сарьяна A.M. и др. по патенту РФ №2109655, МПК В63Н 1/36 (аналог), содержащее гибкую оболочку в виде плавника с полостью, заполненной жидкостью, один конец которой свободен, другой присоединен к приводу, плавник шарнирно закреплен на транце транспортного средства, причем полость повторяет форму плавника, а привод выполнен в виде последовательно соединенных s-образного патрубка, регулятора давления и румпеля, связанных с полостью.
Кроме того, в данном устройстве регулятор давления в приводе выполнен в виде цилиндра, оба конца которого закрываются с наружных торцов сильфонами.
Недостатком данного устройства является его сложность в практической реализации и ограниченная мощность, передаваемая водной среде плавником с малой опорной поверхностью. Кроме того, гибкая оболочка и сильфоны также имеют ограниченный ресурс.
Задачей предлагаемого изобретения является создание простого по конструкции универсального плавникового движителя, который может быть использован на плавсредствах различного назначения.
Технический результат предлагаемого изобретения заключается в следующем:
- повышен КПД движителя и, соответственно, скорость хода за счет использования в кормовой части не менее двух протяженных вдоль оси плавсредства плавников с возможностью их поперечных колебаний, причем плавники имеют окна, перекрываемые подвижными лопастями;
- повышен КПД движителя, скорость и маневренность плавсредства за счет дополнительного размещения по обоим бортам аналогичных плавников с окнами, перекрываемых подвижными лопастями;
- уменьшен эффект «засасывания» корпуса плавсредства струей (имеющей место при использовании стандартного гребного винта) за счет удаленного расположения лопастей плавников от корпуса в предлагаемом движителе;
- исключена кавитация и явления с нею связанные за счет невысокого числа поперечных перемещений плавников, отбрасывающих своими лопастями ту же массу воды и создающих ту же тягу, что и сравнимый по мощности типовой винтовой движитель, имеющий гораздо большие и критичные к кавитации обороты.
Технический результат достигается за счет того, что движитель для плавсредства в варианте надводного судна содержит по обе стороны от осевой линии судна протяженные кормовые плавники с окнами, над которыми на своих осях установлены подвижные и закрывающиеся при их движении в сторону осевой линии судна лопасти, причем плавники управляются возвратно-поступательными механизмами от системы задания скоростей и углов поворота судна.
Технический результат достигается за счет того, что движитель для плавсредства в варианте подводного судна (подводной лодки) содержит по обе стороны от осевой линии лодки протяженные кормовые плавники с окнами, над которыми на своих осях установлены подвижные и закрывающиеся при их движении в стороны осевой линии лодки лопасти, причем плавники управляются возвратно-поступательными механизмами от системы задания скоростей и углов поворота лодки, а плавники и возвратно-поступательные механизмы расположены на подвижной транцевой плите, закрепленной на своей оси и соединенной с дополнительным мотор-редуктором, расположенным на днище лодки и подключенным к системе задания скоростей и углов поворота лодки в горизонтальной либо в вертикальной плоскостях.
Технический эффект достигается также за счет того, что движитель для плавсредства, как в варианте надводного, так и в варианте подводного судна содержит дополнительно вдоль обоих бортов протяженные бортовые плавники с окнами, над которыми на своих осях закреплены подвижные и закрывающиеся при движении в сторону бортов лопасти, причем плавники управляются возвратно-поступательными механизмами, подключенными к системе задания скоростей и углов поворота плавсредства.
В результате поиска по источникам патентной и научно-технической информации, совокупность признаков, характеризующая описываемый «Плавниковый лопастной движитель для плавсредств надводного и подводного плавания (Варианты)», нами не обнаружена.
На основании сравнительного анализа предложенного технического решения с известным уровнем техники можно утверждать, что между совокупностью отличительных признаков, выполняемых ими функций и достигаемой задачи, предложенное техническое решение не следует явным образом из уровня техники.
На чертежах приведены конструкции предлагаемых движителей и схемы их работы.
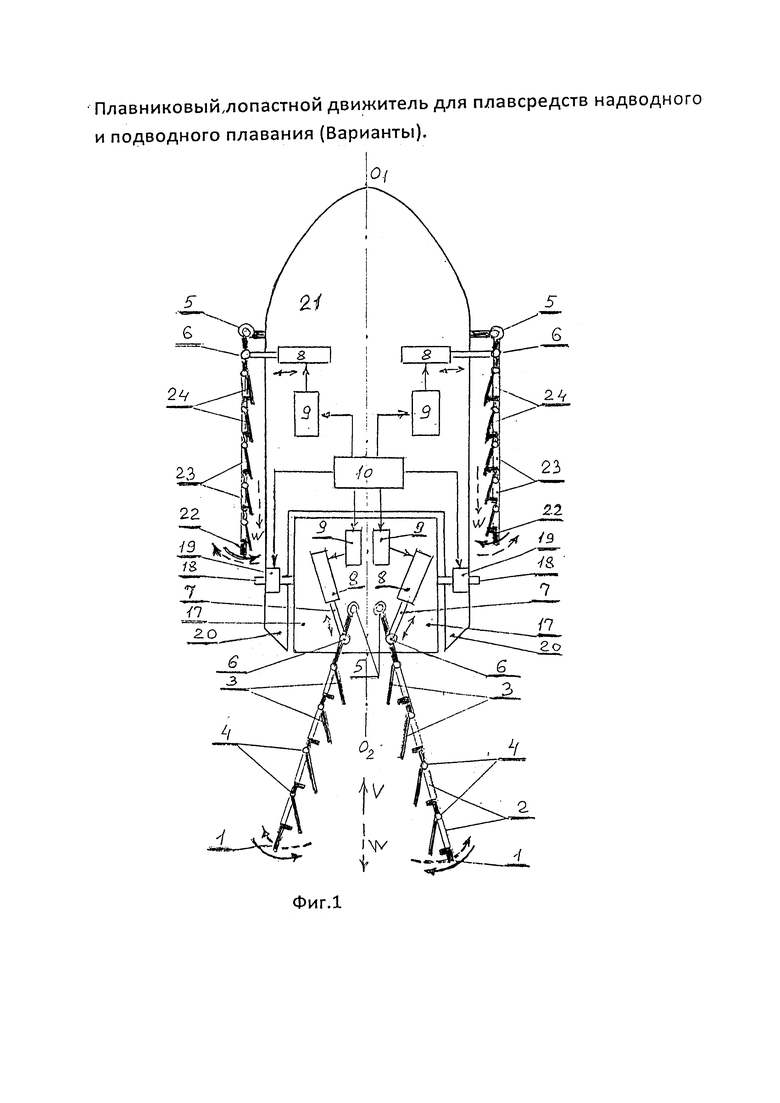
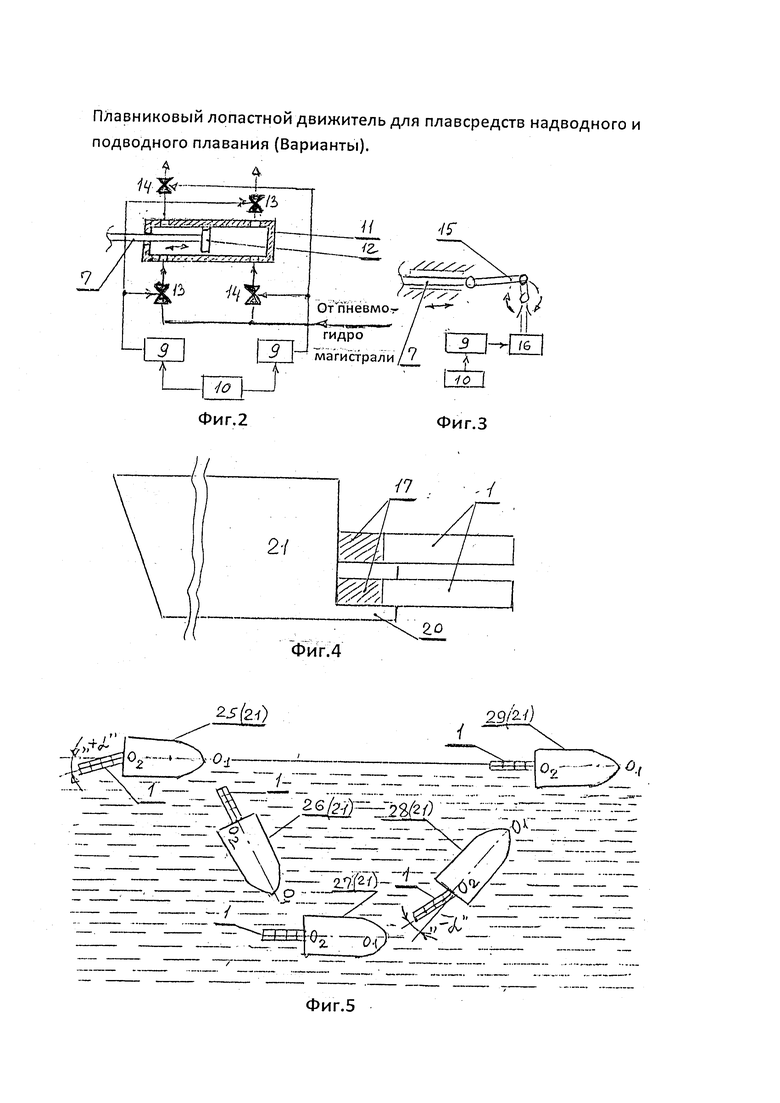
На фиг. 1 изображен вариант плавсредства (вид сверху) с кормовыми плавниками, расположенными на транцевой плите в корме плавсредства, и с бортовыми плавниками по бортам плавсредства, на фиг. 2 и 3 показаны варианты выполнения возвратно-поступательных механизмов, перемещающих кормовые и бортовые плавники, на фиг. 4 схематично показано расположение двух пар кормовых плавников на разных по высоте транцевых плитах, а на фиг. 5 - схема перемещения подводного плавсредства (подводной лодки, дрона и т.п.) в вертикальной плоскости, находясь в надводном и подводном положениях.
«Плавниковый лопастной движитель для плавсредств надводного и подводного плавания (Варианты)» содержит (фиг. 1) пары протяженных кормовых плавников 1 слева и справа относительно оси O1-O2 плавсредства с окнами 2, перекрываемые лопастями 3, размещенных на своих осях 4, причем плавники размещены на осях 5 и посредством шарниров 6 соединены со штоками 7 возвратно-поступательных механизмов 8, а последние через устройства 9 управления механизмами управляются от центральной системы 10 задания скорости и углов поворота плавсредства.
Возвратно-поступательный механизм (фиг. 2) может быть выполнен в виде гидропневмопривода, состоящего из цилиндра 11, внутри которого перемещается поршень 12, соединенный со штоком, а через управляемые пары вентилей 13, 14 от пневмо- или гидромагистрали подается соответственно сжатый воздух или жидкость для обеспечения возвратно-поступательного движения поршня.
Возвратно-поступательный механизм может также быть выполнен (фиг. 3) с помощью кривошипно-шатунного механизма 15, управляемого мотор-редуктором 16.
Возвратно-поступательный механизм может также быть выполнен (фиг. 3) с помощью кривошипно-шатунного механизма 15, управляемого мотор-редуктором 16.
Пары кормовых плавников размещаются на своих осях совместно с возвратно-поступательными механизмами и устройствами их управления на транцевой плите 17 в кормовой части плавсредства (фиг. 1). Для обеспечения равномерности движения плавсредства на транцевых плитах по высоте может быть расположено несколько пар кормовых плавников (фиг. 4), работающих в противофазе.
В варианте подводного судна (подводной лодки, дрона) (фиг. 1), транцевая плита имеет ось 18, соединенную с мотор-редуктором 19 поворота плиты, установленным в кормовой части 20 плавсредства 21.
На плавсредстве могут быть расположены с обоих бортов дополнительные боковые протяженные плавники 22 со своими окнами 23, перекрываемые лопастями 24, и аналогичной схемой их управления (фиг. 1).
На фиг. 5 позициями 25, 26, 27, 28, 29 показана схема перемещения подводной лодки из надводного в подводное и обратно в надводное положение.
«Плавниковый лопастной движитель для плавсредств надводного и подводного плавания (Варианты)» работает следующим образом (фиг. 1).
По командам системы 10 задания скорости и углов поворота плавсредства 21 на устройства 9 управления возвратно-поступательными механизмами 8 штоки 7 последних посредством шарниров 6 понуждают кормовые плавники 1 совершать колебательные движения, поворачиваясь на своих осях 5, относительно центральной оси O1-О2 плавсредства (фиг. 1).
В устройстве могут быть использованы разные схемы возвратно-поступательных механизмов.
Работа возвратно-поступательного механизма, изображенного на фиг. 2, производится следующим образом. При поступлении сигнала с устройства управления 9, например, на пару управляемых вентилей 13 от пневмогидрома-гистрали поступает сжатый воздух или жидкость под давлением на левый вентиль 13, проходит через него в левую часть цилиндра 11 и заставляет поршень 12 с подвижным штоком перемещаться по направлению вправо, выталкивая при этом из правой части цилиндра воздух или жидкость через правый вентиль 13 наружу. Аналогично, при подаче сигнала на пару управляющих вентилей 14 поршень с подвижным штоком 5 будет перемещаться справа налево. Частота перемещения подвижного штока 7 определяется системой 10 задания скорости и углов поворота плавсредства.
Возвратно-поступательный механизм, представленный, как вариант, на фиг. 3, использует кривошипно-шатунный механизм 15, на оси которого размещен мотор-редуктор 16. Частота перемещения подвижного штока 7 этого механизма будет зависеть от числа оборотов мотор-редуктора, задаваемого системой 10 через устройство управления. В частности, может быть использован частотно-регулируемый привод.
При удалении штоками 7 кормовых плавников 1 от оси O1-О2 их окна 2 открываются за счет поворота лопастей 3 на осях 4, а при приближении плавников 1 в сторону оси O1-О2 лопасти 3 закрываются и кормовые плавники 1 загребают объем воды в пространство между плавниками 1, выталкивая ее назад и создавая реактивное движение плавсредству вперед.
При движении плавсредства 21 в прямом направлении система 10 задания скорости и углов поворота обеспечивает синхронное перемещение плавников 1 относительно центральной оси O1-О2 плавсредства, при этом объем W воды, периодически выталкиваемый из пространства между сближающимися плавниками, вынуждает плавсредство двигаться в прямом направлении (V).
Для обеспечения равномерности движения плавсредства 21 в его кормовой части может быть установлено две или более транцевые плиты (фиг. 4), на которых установлены аналогичные плавники со своими возвратно-поступательными механизмами, работающие в противофазе.
Увеличение курсовой скорости движения (V) плавсредства задается системой управления путем увеличения частоты движения штоков 7 и, соответственно, частоты перемещения плавников 1.
При изменении направления движения один из кормовых плавников отводят в сторону от осевой линии O1-О2 и его движение замедляют или останавливают, а другой плавник продолжает колебания с частотой, необходимой для данного угла поворота.
Работа плавсредства, оснащенного бортовыми плавниками 22 (фиг. 1), осуществляется аналогичным образом, при этом объем W воды выталкивается в заднем направлении из пространства между плавниками и бортами плавсредства, поскольку лопасти 24 перекрывают окна 23 плавников при их движении в сторону бортов.
На фиг. 1 сплошной стрелкой-дугой показано движение кормовых плавников 1 в сторону осевой линии O1-О2 и бортовых плавников 22 в сторону бортов плавсредства (рабочий ход), а пунктирной стрелкой-дугой показано направление их движения от осевой линии и от бортов (холостой подготовительный ход плавников).
В варианте подводного плавсредства (подводной лодки, дрона и т.п.) движитель работает следующим образом.
По команде из системы 10 задания скорости и углов поворота плавсредства 21 на мотор-редуктор 19 поворота транцевой плиты 17 (фиг. 1) последняя совместно с механизмами и кормовыми плавниками 1 занимают некоторый угол «+α» по отношению к центральной оси O1-О2 и поверхности воды (фиг. 5). При включении в работу кормовых плавников 1 плавсредство 21, находясь на поверхности в позиции 25, начинает под углом «+α» перемещаться в глубину на позицию 26. В подводном положении плавсредство движется горизонтально при угле α=0 (позиция 27), а при всплытии угол «α» изменяется на противоположный (позиция 28). Дальнейшее движение плавсредства по горизонтали на поверхности воды - позиция 29.
Находясь в подводном положении и манипулируя перемещением кормовых и бортовых плавников 1 на их осях 5 относительно центральной оси O1-О2, плавсредство имеет также возможность перемещаться и в горизонтальной плоскости.
Использование плавниковых лопастных движителей для некоторых плавсредств устраняет ряд технических противоречий, присущих винтам судов [5], обеспечивая усиление маневренности в горизонтальной и в вертикальной плоскостях, исключает кавитацию и явления с нею связанные.
В работе [6], с. 159 объясняется эффект «засасывания» при больших оборотах винта: «...Вода в струе перед гребным винтом приобретает дополнительную скорость, а давление в ней падает. Следовательно, возрастает сопротивление формы, расположенного в этой струе корпуса, несколько увеличивается и сопротивление трения за счет скорости обтекания кормовой оконечности судна...».
И далее, там же [6], на с. 161: «...Единственный путь в этом направлении - отдаление винта от корпуса, при этом коэффициент попутного потока практически не меняется, а коэффициент засасывания интенсивно убывает...».
В этой связи следует ожидать от предлагаемого плавникового лопастного движителя, плавники которого пространственно удалены, значительного снижения данного отрицательного эффекта.
Использование бортовых плавников также не повлияет на увеличение коэффициента засасывания в силу их малой частоты колебаний.
Предлагаемая конструкция лишена также такого явления, как кавитация. В работе [7], с. 96 указывается, что «...Кавитация возникает в тех точках потока, где в результате движения жидкости происходит значительное местное понижение давления...». Таким образом, это происходит при больших оборотах винтовых движителей. Отличие предлагаемого плавникового движителя, отбрасывающего своими лопастями ту же массу воды и создающего ту же тягу, что и сравнимый по мощности винтовой движитель, заключается в том, что лопасти перемещаются с гораздо меньшей угловой скоростью. Кроме того, колебательные движения плавникового движителя не создают вибраций, шумов и электромагнитных помех.
Использование предлагаемого плавникового лопастного движителя в известной мере копирует движительные плавники многих гидробионтов. С моделированием движения морских животных и рыб связано в настоящее время большое количество исследований. Так, например, в серии наблюдений, проведенных в США, зафиксирована скорость рыбы-парусника до 109 км/ч [8]. В работе [9], с. 1 указывается, что в природе: «Естественный отбор создал другой движитель - упругий плавник. В результате рыбы затрачивают на движение гораздо меньшую удельную энергию, чем суда (парадокс Грэя)».
Предлагаемое изобретение в большей мере имитирует движение морского гидробионта - каракатицу [10]. В статье указывается: «Обычно они плавают при помощи плавников, но могут использовать и реактивный способ передвижения. Плавники могут действовать раздельно, что дает каракатице удивительную маневренность при движении - она может двигаться даже боком. Если же каракатица передвигается только реактивным способом, то плавники она прижимает к брюху...».
В предлагаемом изобретении имитация подобного реактивного движения осуществляется за счет выталкивания объема воды при сближении кормовых плавников 1 относительно оси плавсредства и при перемещении бортовых плавников 22 в направлении бортов плавсредства. Кроме того, раздельное управление плавниками позволяет улучшить маневренность плавсредств.
Учитывая изложенное, следует ожидать использование предлагаемого плавникового лопастного движителя в судостроительной промышленности для разного рода плавсредств как надводного, так и подводного плавания.
Источники информации
1. Кузнецов С.А. Плавниковый движитель. Патент РФ №2041129, МПК В63Н 1/36, В63Н 19/02 (аналог).
2. Михайлов А.Г. Судовой ленточный движитель. Патент РФ №2035354, МПК В63Н 1/36 (аналог).
3. Семенов Г.А. Движитель для судов и аппаратов надводного и подводного плавания. Патент РФ №2090441, МПК В63Н 1/36 (аналог).
4. Лозовский Л.А., Сарьян A.M. и др. Способ движения транспортного средства и устройство «рыбий хвост» для его осуществления. Патент РФ №2109655, МПК В63Н 1/36 (аналог).
5. Дорогостойский Д.В. Теория и устройство судна / Д.В. Дорогостойский. - Л., 1975, с. 351.
6. Жинкин В.Б. Теория и устройство корабля / В.Б. Жинкин. - СПб, 2000, с. 159.
7. Артюшков Л.С.и др. Судовые движители / Л.С. Артюшков. - Л., 1988, с. 54.
8. Беляев В.А., Кузнецов Д.С. Эластичные волновые движители, [электронный ресурс], доступ: www.rae.ru/forum2012/254.
9. Чижиумов С.Д., Беляев В.А., Кузнецов Д.С. Проекты плавниковых движителей / С.Д. Чижиумов. - Комсомольск-на-Амуре, Государственный технический университет, 2012.
10. Статья «Каракатицы - интересный представитель головоногих моллюсков» [электронный ресурс], доступ: www.medusy.ru/diving/karakatica/index.shtm.
11. Храмушин В.Н. Корабль с плавниковым движителем. Патент РФ №2360831, МПК В63Н 1/36 (аналог).
12. Васильев В.Ю., Сенькин Ю.Ф. Судовой волновой движитель. Патент РФ №2035356, МПК В63Н 19/02, F03B1 13/10 (аналог).
13. Патент Великобритании GB №1033304, кл. В63Н 1/36, 1966 (аналог).
14. Патент США №3048141, кл. В63Н 1/36, 115-22.2,1962 (аналог).
15. Бабенко В.В., Козлов Л.Ф., Каян В.П. Машущий плавниковый движитель. Патент РФ №484129, МПК В63Н 1/36, В63В 1/32 (аналог).
16. Румянцев В.П. Судовой движитель. Патент РФ №2086465, МПК В63Н 1/32, В63Н 11/06 (аналог).
Изобретение относится к судостроению, а именно к плавсредствам. Плавниковый лопастной движитель для плавсредств надводного и подводного плавания включает в себя вариант конструкции надводного судна, которое содержит по обе стороны от осевой линии судна протяженные кормовые плавники с окнами, перекрывающимися при их движении в сторону осевой линии судна лопастями. На кормовом срезе днища судна установлена транцевая плита с размещенными на ней на своих осях плавниками, возвратно-поступательными механизмами с подвижными штоками и устройствами управления последними. Штоки возвратно-поступательных механизмов соединены с плавниками посредством шарниров. В варианте подводного судна, которое содержит по обе стороны от осевой линии судна протяженные кормовые плавники с окнами, перекрывающимися при их движении в сторону осевой линии судна лопастями. На кормовом срезе днища судна установлена транцевая плита, которая выполнена подвижной, и закреплена на оси, и соединена с мотор-редуктором, установленным на днище судна. Мотор-редуктор соединен с системой задания скорости и углов поворота судна. Достигается повышение КПД, исключение кавитации, устранение эффекта «засасывания» и электромагнитных помех. 2 н. и 2 з.п. ф-лы, 5 ил.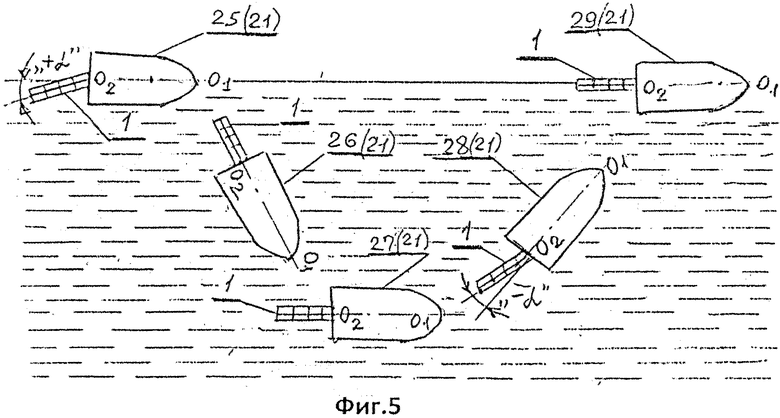
1. Плавниковый лопастной движитель для плавсредств надводного и подводного плавания, характеризующийся для надводного судна тем, что он содержит по обе стороны от осевой линии судна протяженные кормовые плавники с окнами, над которыми на своих осях установлены подвижные и закрывающиеся при их движении в сторону осевой линии судна лопасти, на кормовом срезе днища судна установлена транцевая плита с размещенными на ней на своих осях плавниками, возвратно-поступательными механизмами с подвижными штоками и устройствами управления последними, подключенными к системе задания скоростей и углов поворота судна, причем подвижные штоки возвратно-поступательных механизмов соединены с плавниками посредством шарниров.
2. Плавниковый лопастной движитель для плавсредств надводного плавания по п.1, характеризующийся тем, что вдоль обоих бортов плавсредства дополнительно установлены протяженные бортовые плавники с окнами, под которыми на своих осях закреплены подвижные и закрывающиеся при движении в стороны бортов лопасти, а на днище плавсредства установлены дополнительные возвратно-поступательные механизмы с подвижными штоками и устройства управления последними, подключенные к системе задания скоростей и углов поворота плавсредства, причем подвижные штоки возвратно-поступательных механизмов соединены посредством шарниров с бортовыми плавниками.
3. Плавниковый лопастной движитель для плавсредств надводного и подводного плавания, характеризующийся для подводного судна (подводной лодки) тем, что он содержит по обе стороны от осевой линии лодки протяженные кормовые плавники с окнами, над которыми на своих осях установлены подвижные и закрывающиеся при их движении в сторону осевой линии лодки лопасти, на кормовом срезе днища судна установлена подвижная транцевая плита с размещенными на ней на своих осях плавниками, возвратно-поступательными механизмами с подвижными штоками и устройствами управления последними, подключенными к системе задания скоростей и углов поворота лодки, причем подвижные штоки возвратно-поступательных механизмов соединены с плавниками посредством шарниров, а подвижная транцевая плита закреплена на оси, которая соединена с мотор-редуктором, установленным на днище лодки и соединенным с системой задания скорости и углов поворота подводной лодки в горизонтальной и вертикальной плоскостях.
4. Плавниковый лопастной движитель для плавсредств подводного плавания по п.3, характеризующийся тем, что вдоль обоих бортов плавсредства дополнительно установлены протяженные бортовые плавники с окнами, под которыми на своих осях закреплены подвижные и закрывающиеся при движении в стороны бортов лопасти, а на днище плавсредства установлены дополнительные возвратно-поступательные механизмы с подвижными штоками и устройства управления последними, подключенные к системе задания скоростей и углов поворота плавсредства, причем подвижные штоки возвратно-поступательных механизмов соединены посредством шарниров с бортовыми плавниками.
| СПОСОБ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО "РЫБИЙ ХВОСТ" ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2109655C1 |
| РАДИОЧАСТОТНАЯ СХЕМА, УСТАНОВЛЕННАЯ НА БОРТУ СПУТНИКА, СОДЕРЖАЩАЯ СИСТЕМУ ТЕПЛОВОГО КОНТРОЛЯ ПРИ ПОМОЩИ СИГНАЛА ТРЕВОГИ, ГЕНЕРИРУЕМОГО ПРИ ОТРАЖЕНИИ МОЩНОСТИ | 2011 |
|
RU2570839C2 |
| US 5192237 A, 09.03.1993 | |||
| Судовая гребная установка | 1982 |
|
SU1557004A2 |

