ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Варианты выполнения, раскрытые здесь, относятся, в общем, к системам для аварийного выпуска узлов убирающегося шасси летательного аппарата.
УРОВЕНЬ ТЕХНИКИ
[0002] Летательный аппарат с убирающимся шасси должен обеспечивать специальную систему в качестве резервной системы для обычной бортовой системы уборки/выпуска шасси летательного аппарата, которая будет позволять шасси летательного аппарата выпускаться в аварийной ситуации (например, в ситуации, в которой шасси не может быть выпущено в выпущенное состояние с помощью обычной бортовой системы выпуска шасси из-за отказа компонента). В общем, все системы аварийного резервного выпуска шасси должны быть и простыми в эксплуатации и полностью отделены от обычных бортовых систем приведения в действие шасси.
[0003] Имеются несколько типов аварийных резервных систем выпуска шасси, которые традиционно доступны для летательного аппарата, включая в себя, например, системы с электрическим приводом, системы с гидравлическим приводом, механизмы с пружинным приводом и системы передачи энергии, посредством которых энергия для освобождения шасси обеспечивается только пилотом.
[0004] Другой тип систем аварийного выпуска шасси включает те, которые основываются на выпуске при свободном падении под действием силы тяжести узлов шасси. Например, в таком летательном аппарате с относительно тяжелыми узлами шасси (включающими, например, стойки шасси и соответственные конструктивные компоненты, а также узлы колес шасси) разработаны системы аварийного выпуска шасси, которые позволяют шасси по существу "свободно падать" под действием силы тяжести из его убранного и установленного на замок убранного положения в выпущенное и установленное на замок выпущенного положения положение. Однако система аварийного приведения в действие свободного падения шасси становится более сложной, когда створки шасси имеют специальные приводы створок. В таком случае во время штатного режима работы селекторный клапан для положения шасси управляет открытием и закрытием створки шасси отдельно от выпуска шасси. Однако при операции свободного падения клапан створки шасси находится в выключенном состоянии, и, таким образом, створки шасси не имеют возможности свободно падать вместе с узлом шасси. Вместо этого створки шасси принудительно открываются путем контакта с узлами шасси, когда те в свободном падении. Для обеспечения того, чтобы створки шасси не приводили к заклиниванию аварийного выпуска свободно падающего шасси, определенная дополнительная конструкция и/или устройство обычно необходимы, чтобы позволять створке шасси открываться в ситуации аварийного выпуска шасси. По этой причине створки шасси, связанные с традиционными системами аварийного выпуска шасси свободным падением, могут быть обеспечены опорными пластинами с низким трением или другими средствами, посредством которых контакт с пневматиками шасси во время выпуска шасси свободным падением под действием силы тяжести будет принудительно перемещать створки шасси в открытое состояние и при этом уменьшать возможность того, что створки будут приводить к заклиниванию последовательности выпуска шасси.
[0005] Однако в некоторых случаях дополнительная конструкция и/или устройства для обеспечения открытия створки шасси во время свободного падения шасси не являются эффективными, например, в тех ситуациях, когда кинематика створки шасси не имеет гармоничного перемещения в том же направлении, что и соответственное шасси. В такой ситуации имеется реальный риск того, что шасси заклинит с его соответственной створкой шасси - случай, который, разумеется, недопустим. Таким образом, конструкция створок шасси обычно ухудшается для того, чтобы создавать требуемое гармоничное перемещение с соответственным шасси в попытке исключить риск заклинивания перемещения створки шасси во время аварийного выпуска шасси свободным падением.
[0006] В связи с тем, что необходимо в этом уровне техники, являются системы аварийного приведения в действие шасси для шасси летательного аппарата, которые позволяют створкам шасси открываться с небольшим или отсутствующим физическим взаимодействием с соответственным узлом шасси во время аварийного выпуска шасси свободным падением под действием силы тяжести. Именно к обеспечению такой потребности направлены варианты выполнения настоящего изобретения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] В общем изобретение, которое воплощено в системах, описанных здесь, позволяет створкам шасси открываться в случае аварийного выпуска шасси свободным падением под действием силы тяжести с по существу отсутствующим контактом с пневматиками шасси (т. е. с отсутствующим или по большей мере лишь с минимальным контактом между пневматиками шасси и створкой шасси в момент в последовательности открытия створки шасси, которая является кинематически благоприятной). Таким образом, системы аварийного выпуска шасси согласно вариантам выполнения, раскрытым здесь, позволяют перемещение шасси свободным падением, синхронизируемое с открытием соответственных створок шасси. То есть согласно вариантам выполнения, раскрытым здесь, шасси синхронно освобождается только после того, как соответственная створка шасси будет находиться в безопасном положении во время ее последовательности открытия, тем самым исключая риск того, что створка шасси будет подвергать заклиниванию полный выпуск шасси во время аварийного выпуска шасси из-за контакта между пневматиками шасси и створкой шасси.
[0008] В связи с этим согласно варианту выполнения изобретения обеспечена система аварийного выпуска шасси свободным падением под действием силы тяжести для летательного аппарата, имеющая узел шасси, подвижный между убранным и выпущенным положениями, и створку шасси, имеющую закрытое состояние, когда узел шасси находится в убранном положении, и подвижную в открытое состояние, чтобы позволять узлу шасси перемещаться в выпущенное положение. Такая система будет включать в себя механизм запирания шасси, который включает в себя привод запирания, имеющий заданный предел мертвого хода. Перемещение привода запирания в пределах диапазона мертвого хода будет, тем самым, предотвращать механизм запирания шасси от физического разблокирования узла шасси, тогда как перемещение привода запирания за пределы мертвого хода разблокирует механизм запирания шасси из узла шасси.
[0009] Таким образом, согласно таким вариантам выполнения система синхронизации шасси в свободном падении будет функционально соединена с механизмом запирания шасси и со створкой шасси. Система синхронизации будет включать в себя первую и вторую рабочие последовательности, посредством чего вторая рабочая последовательность выполняется с задержкой по времени относительно первой рабочей последовательности. Во время первой рабочей последовательности привод запирания перемещается в пределах диапазона мертвого хода, в то время как одновременно створка шасси имеет возможность свободно падать под действием силы тяжести из закрытого состояния к ее открытому состоянию, и во время второй рабочей последовательности привод запирания перемещается за пределы мертвого хода, чтобы позволять узлу шасси свободно падать под действием силы тяжести из убранного положения в его выпущенное положение. Эти первая и вторая рабочие последовательности системы синхронизации шасси в свободном падении, тем самым, позволяют створке шасси перемещаться посредством свободного падения под действием силы тяжести к ее открытому состоянию перед перемещением шасси к его выпущенному положению посредством свободного падения под действием силы тяжести.
[0010] Согласно этим вариантам выполнения система выпуска шасси будет включать в себя инициируемый пилотом привод системы (например, управляемый вручную приводной рычаг) и узел кабеля передачи усилия, функционально взаимосвязывающий привод системы и привод запирания. Работа привода системы будет, тем самым, вызывать первую рабочую последовательность системы синхронизации шасси в свободном падении.
[0011] Может быть обеспечена гидравлическая система управления, которая выполнена с возможностью позволения свободного падения под действием силы тяжести узлу шасси и створке шасси. Таким образом, узел кабеля передачи усилия может дополнительно функционально взаимосвязывать привод системы и гидравлическую систему управления так, что работа привода системы гидравлически разъединяет гидравлическую систему управления с узлом шасси и со створкой шасси, чтобы позволять их свободное падение под действием силы тяжести.
[0012] Система синхронизации шасси в свободном падении может быть обеспечена согласно некоторым вариантам выполнения кулачковым приводом, функционально взаимодействующим с узлом кабеля передачи усилия и подвижным между нерабочим состоянием и рабочим состоянием. Соединительный стержень, взаимосвязывающий кулачковый привод и створку шасси, присутствует в некоторых вариантах выполнения, чтобы заставлять кулачковый привод перемещаться соответственно из нерабочего состояния в его рабочее состояние в ответ на перемещение створки шасси из закрытого состояния к ее открытому состоянию. Таким образом, в связи с этим перемещение кулачкового привода в его рабочее положение вызывает вторую рабочую последовательность системы синхронизации шасси в свободном падении (т. е. посредством чего механизм запирания шасси перемещается за пределы мертвого хода, чтобы позволять узлу шасси свободно падать под действием силы тяжести в его выпущенное состояние).
[0013] Эти и другие аспекты и преимущества настоящего изобретения станут более ясными после того, как будет приведено тщательное рассмотрение для последующего подробного описания его предпочтительных примерных вариантов выполнения.
КРАТКОЕ ОПИСАНИЕ СОПРОВОЖДАЮЩИХ ЧЕРТЕЖЕЙ
[0014] Раскрытые варианты выполнения настоящего изобретения будут лучше и полнее понятны со ссылкой на следующее далее подробное описание примерных неограничивающих иллюстративных вариантов выполнения в сочетании с чертежами, на которых:
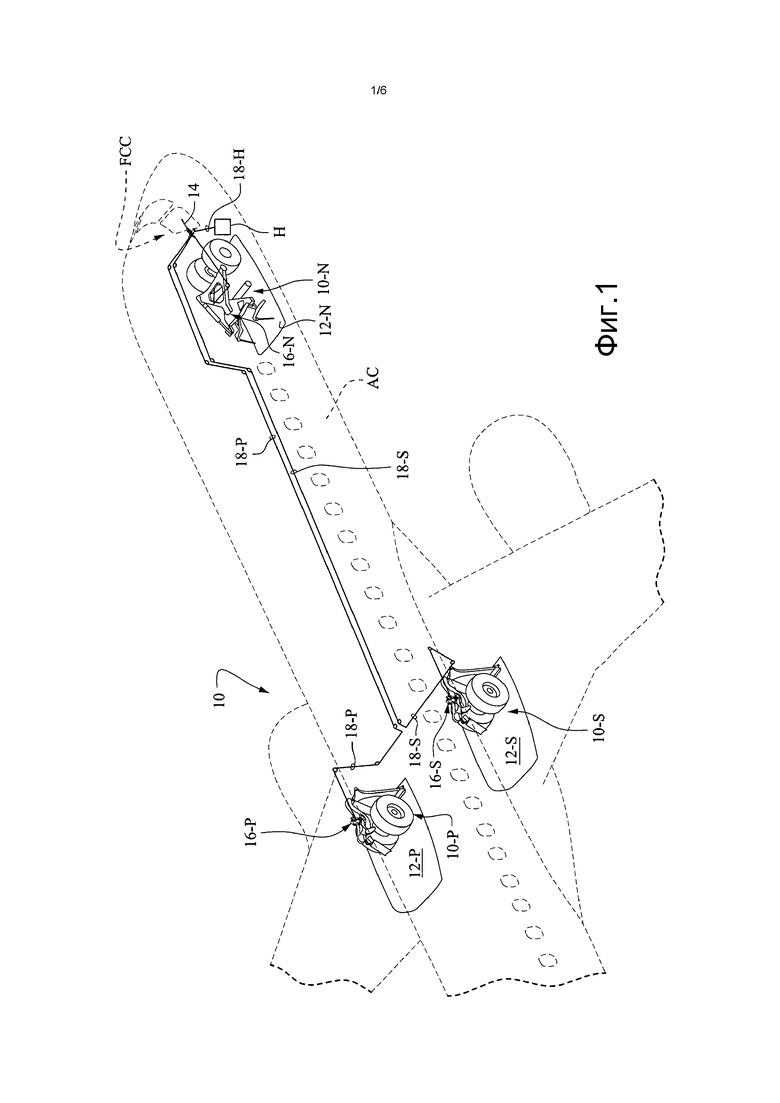
[0015] фиг. 1 представляет собой вид в перспективе варианта выполнения системы аварийного выпуска шасси летательного аппарата согласно изобретению;
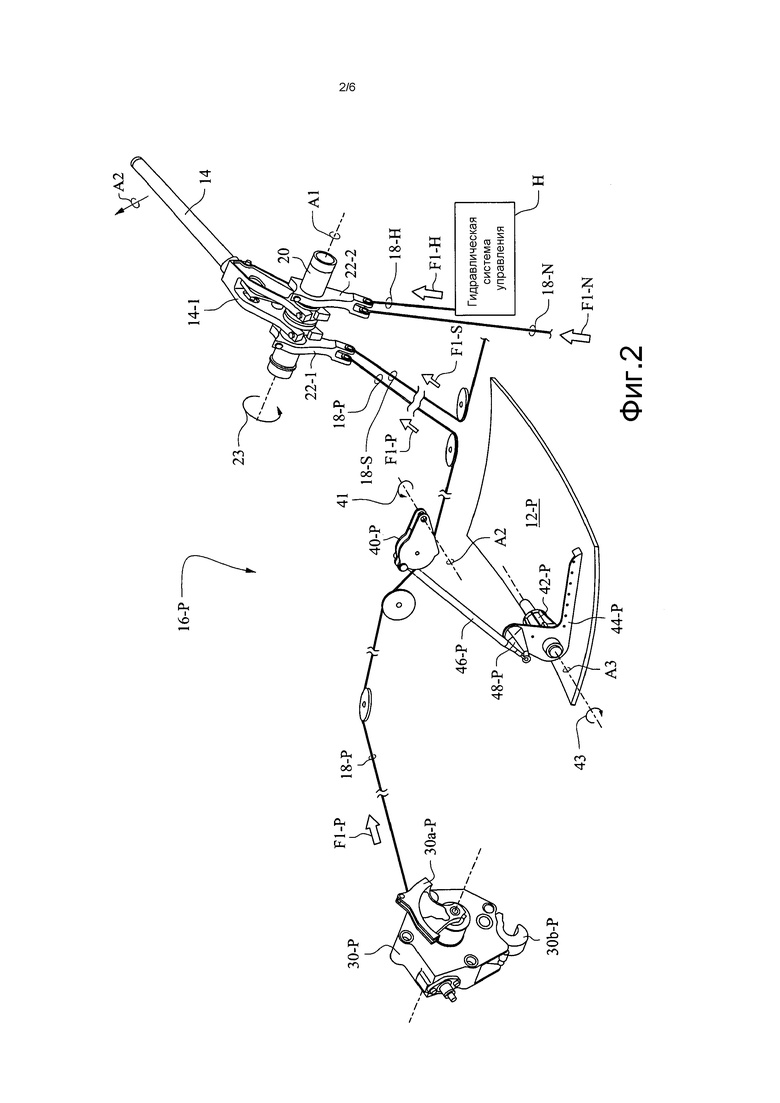
[0016] фиг. 2 представляет собой увеличенный вид в перспективе части системы, показанной в варианте выполнения на фиг. 1, связанной с узлом левого основного шасси;
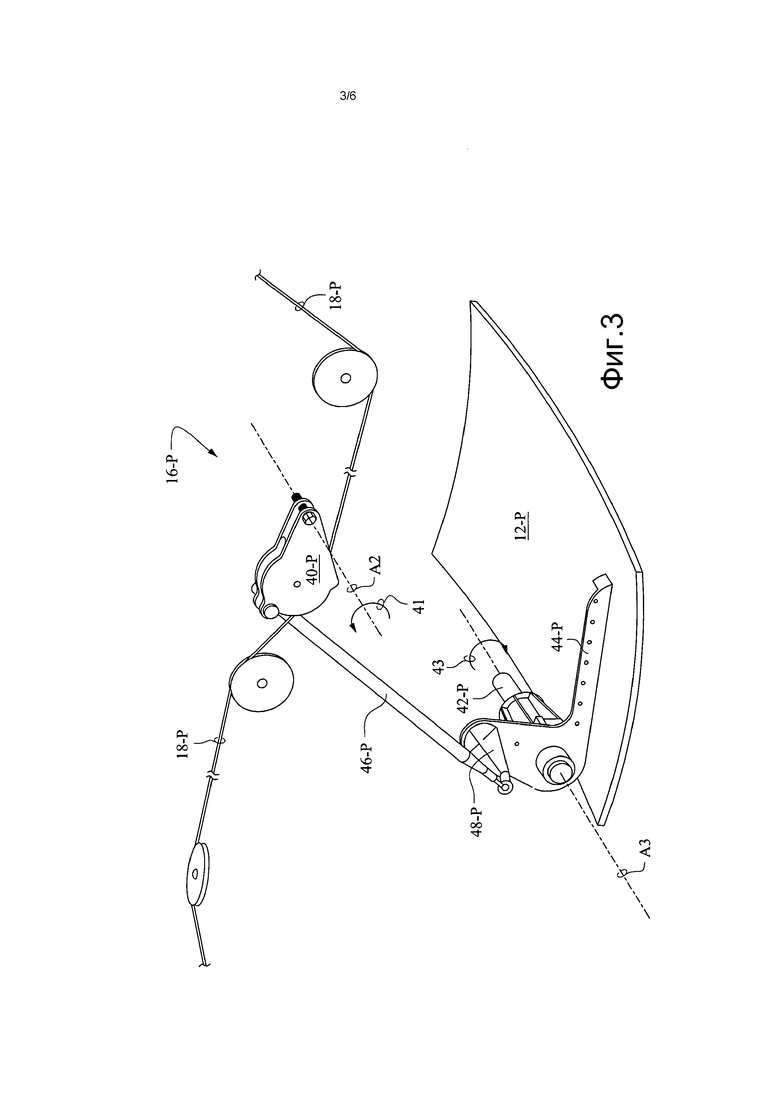
[0017] фиг. 3 представляет собой дополнительный увеличенный вид в перспективе створки левого основного шасси и ее соответственных компонентов системы, показанных со створкой шасси в закрытом состоянии (т. е. до приведения в действие системы аварийного выпуска);
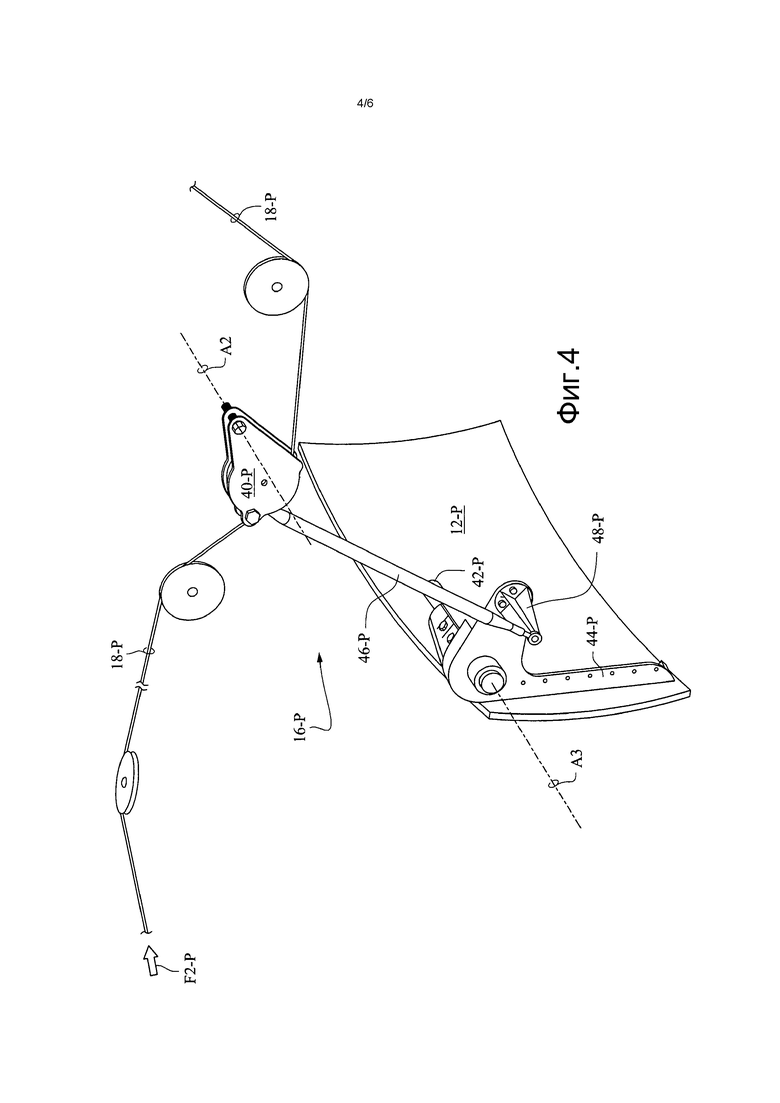
[0018] фиг. 4 представляет собой увеличенный вид в перспективе створки левого основного шасси и ее соответственных компонентов системы, которые изображены на фиг. 3, но показаны со створкой шасси в открытом состоянии (т. е. после приведения в действие системы аварийного выпуска);
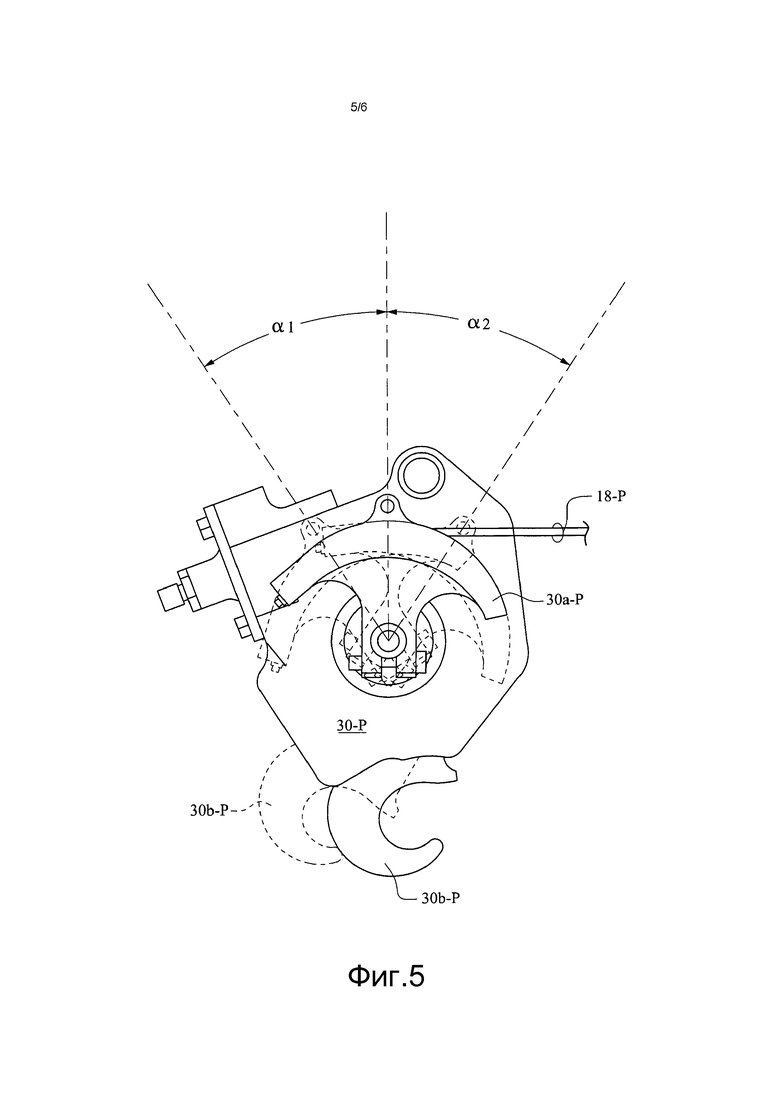
[0019] фиг. 5 представляет собой увеличенный схематический вид сбоку механизма запирания шасси и его соответственного привода запирания во время последовательности работы во время приведения в действие системы аварийного выпуска шасси согласно вариантам выполнения, описанным здесь; и
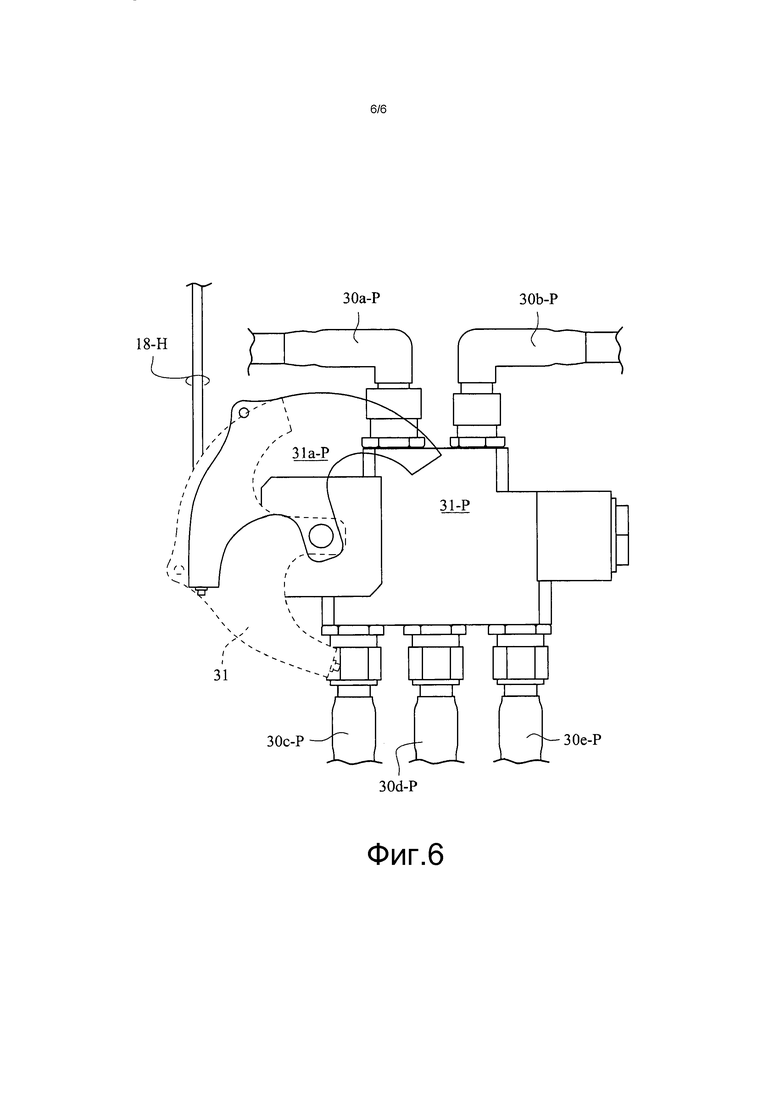
[0020] фиг. 6 представляет собой увеличенный схематический вид сбоку гидравлического клапана управления, связанного с узлом шасси, функционально соединенным с системой аварийного выпуска шасси согласно вариантам выполнения, описанным здесь.
ПОДРОБНОЕ ОПИСАНИЕ
[0021] Сопровождающая фиг. 1 изображает схему системы 10 аварийного выпуска шасси летательного аппарата согласно варианту выполнения изобретения, устанавливаемой в летательном аппарате AC транспортной категории. В связи с этим летательный аппарат AC будет включать в себя традиционные узлы основного шасси левого и правого бортов и узел переднего шасси, обозначенные ссылочными позициями 10-P, 10-S и 10-N соответственно. Обычно, когда каждый из узлов 10-P, 10-S и 10-N находится в убранном (т. е. в условии полета) состоянии, ниши фюзеляжа, в которые узлы убираются, будут закрываться одной (или более) створками 12-P, 12-S и 12-N шасси соответственно так, чтобы уменьшать аэродинамическое сопротивление во время полета летательного аппарата, связанное с узлами 10-P, 10-S и 10-N шасси и их соответственными нишами фюзеляжа.
[0022] Система 10 включает в себя приводимый в действие пилотом рычаг 14 аварийного выпуска шасси, размещенный в передней кабине FCC экипажа летательного аппарата AC. Рычаг функционально соединен с гидравлической системой H управления, связанной с системой шасси летательного аппарата и с соответственными узлами 16-P, 16-S и 16-N синхронизации свободного падения шасси, связанными с узлами 10-P, 10-S основного шасси левого и правого бортов и с узлом 10-N переднего шасси соответственно. Рабочее взаимодействие между рычагом 14 и гидравлической системой H управления с одной стороны и узлами 16-P, 16-S и 16-N синхронизации свободного падения с другой стороны обеспечено посредством кабелей 18-P, 18-S, 18-N и 18-H передачи усилия соответственно. Как будет объяснено более подробно ниже, ручное поворотное перемещение приводного рычага 14 пилотом из неактивного положения ожидания в активное рабочее положение (т. е. в том случае, когда требуется аварийный выпуск шасси свободным падением) будет одновременно и в ответ приводить в действие гидравлическую систему H управления с одной стороны и узлы 16-P, 16-S и 16-N синхронизации свободного падения с другой стороны благодаря их рабочему взаимодействию посредством кабелей 18-P, 18-S, 18-N и 18-H передачи усилия соответственно.
[0023] Сопровождающие фиг. 2-6 дополнительно иллюстрируют систему 10 аварийного выпуска шасси летательного аппарата с конкретной ссылкой на узел 16-P синхронизации свободного падения, связанный с узлом 10-P основного шасси левого борта. Однако будет понятно, что описание, которое следует далее, одинаково применимо к узлам 16-S и 16-N синхронизации свободного падения, связанным с узлами 10-S и 10-N основного шасси правого борта и переднего шасси соответственно. Подобные конструкции, которые описаны ниже со ссылкой на узел 16-P, будут подобным образом представлены в узлах 16-S и 16-N, связанных с узлами 10-S и 10-N основного шасси правого борта и переднего шасси соответственно. Таким образом, последовательность событий, описанных ниже, относительно узла 16-P синхронизации свободного падения будет возникать по существу одновременно с эквивалентной последовательностью событий для узлов 16-S и 16-N синхронизации свободного падения, связанных с узлами 10-S и 10-N основного шасси правого борта и переднего шасси соответственно.
[0024] Как, возможно, может быть наилучшим образом видно на фиг. 2, основание 14-1 приводного рычага 14 прикреплено к приводной оси 20. Ось 20 устанавливается на несущую конструкцию (не показана) для вращательных перемещений вокруг оси A1. Приводная ось 20 удерживает привод 22-1 кабеля, функционально соединенный с проксимальным пилоту концом каждого из кабелей 18-P, 18-S передачи усилия, функционально связанных с системами 16-P, 16-S синхронизации свободного падения узлов 10-P, 10-S основного шасси левого борта и основного шасси правого борта соответственно. В дополнение приводная ось 20 также удерживает привод 22-2 кабеля, соединенный с проксимальными пилоту концами кабелей 18-N и 18-H передачи усилия, функционально связанных с системой 16-N синхронизации свободного падения узла 16-N переднего шасси и с гидравлической системой H управления для каждого из узлов 10-P, 10-S и 10-N шасси соответственно. Таким образом, ручное, инициируемое пилотом перемещение приводного рычага 14 будет вращать приводную ось 20 в направлении против часовой стрелки (как видно на фиг. 2), как указано стрелкой 23, тем самым, в свою очередь, перемещая приводы 22-1, 22-2 кабелей в одном и том же направлении так, чтобы создавать усилия уборки на кабелях 18-P, 18-S, 18-N и 18-H в направлении стрелок F1-P, F1-S, F1-N и F1-H усилия. Таким образом, в связи с этим будет возникать одновременное приведение в действие гидравлической системы H управления с одной стороны и узлов 16-P, 16-S и 16-N синхронизации свободного падения узлов 10-P, 10-S основного шасси левого борта и правого борта соответственно и узла 10-N переднего шасси.
[0025] Со ссылкой конкретно на узел 16-P синхронизации свободного падения, связанный с узлом 10-P основного шасси левого борта, это первоначальное усилие в направлении стрелки F1-P будет испытываться механизмом 30-P запирания шасси. Конкретно дистальный конец кабеля 18-P функционально соединен с приводным элементом 30a-P, связанным с механизмом 30-P запирания. Как показано более подробно на фиг. 5, усилие F1-P, вызываемое поворотной работой рычага 14, будет, в свою очередь, заставлять приводной элемент 30a-P механизма 30-P запирания шарнирно поворачиваться так, чтобы находиться в пределах диапазона предварительно установленного диапазона α1 синхронизирующего мертвого хода, в котором физическое взаимодействие между крюком 30b-P запирания механизма 30-P запирания шасси и узлом 10-P шасси сохраняется (т. е., тем самым, препятствуя свободному падению под действием силы тяжести узла 10-P шасси). В связи с этим в этот момент в первоначальной или первой рабочей последовательности первоначальное приводное усилие в направлении стрелки F1-P не будет заставлять механизм 30-P запирания физически разблокировать узел 10-P основного шасси левого борта. Такое состояние изображено с помощью представлений сплошными линиями приводного элемента 30a-P и крюка 30b-P запирания на фиг. 5.
[0026] Как показано на фиг. 6, первоначальное приводное усилие в направлении стрелки F1-H будет иметь достаточную величину для приведения в действие одновременно гидравлического клапана 31-P свободного падения для узла 10-P основного шасси, связанного с гидравлической системой H управления, чтобы позволять свободное падение узлов 10-P шасси. То есть при приведении в действие рычага 14 результирующее усилие F1-H будет шарнирно поворачивать привод 31a-P клапана из его обычного нерабочего положения, показанного штриховой линией на фиг. 6, в рабочее положение, которое показано сплошной линией на фиг. 6. Таким образом, состояние гидравлического клапана 31-P свободного падения изображено на фиг. 6 в виде ближайшей последующей операции аварийного рычага 14.
[0027] В связи с этим при работе гидравлический клапан 31-P управления, связанный с гидравлической системой H управления, будет заставлять гидравлическое давление освобождаться одновременно из механизма запирания створки (не показан) и механизма 30-P запирания узла шасси посредством трубопроводов с 30a-P по 30e-P. В связи с этим свободному падению под действием силы тяжести створки 12-P шасси будет позволено происходить из закрытого положения, которое показано на фиг. 3, в открытое положение, которое показано на фиг. 4. Однако в то же время гидравлическое давление удаляется из узла 10-P основного и переднего шасси, чтобы позволять свободное падение, как только его соответственный крюк 30b-P, связанный с механизмом 30-P запирания, будет освобожден системой 16-P синхронизации свободного падения способом, описываемым ниже. Однако на этом первоначальном этапе в последовательности, хотя створка 12-P основного шасси находится в свободном падении под действием силы тяжести к ее открытому положению, узел 10-P основного шасси левого борта будет задержан от свободного падения, так как его крюк 30a-P запирания соответственного механизма 30-P запирания не освобожден. Таким образом, хотя узел 10-P основного шасси левого борта находится в состоянии, посредством которого может возникать свободное падение под действием силы тяжести, узел 10-P шасси на мгновение поддерживается в убранном положении благодаря его зацеплению с крюком 30a-P запирания механизма 30-P до дальнейшего приведения в действие во второй последовательности с помощью системы 16-P.
[0028] Фиг. 3 и 4 дополнительно показывают рабочую последовательность системы 16-P синхронизации свободного падения, связанной с узлом 10-P основного шасси левого борта. В связи с этим будет отмечено, что система 16-P включает в себя кулачковый привод 40-P, который шарнирно соединен с несущей конструкцией летательного аппарата (не показана) для поворотного перемещения вокруг оси A2 в направлении стрелки 41. Створка 12-P основного шасси левого борта сама установлена с возможностью поворотного перемещения между закрытым положением, которое показано на фиг. 3, и открытым положением, которое показано на фиг. 4, вокруг оси A3 в направлении стрелки 43 посредством шарнира 42-P створки, соединенного с элементом 44-P кронштейна, связанным со створкой 12-P шасси. Соединительный стержень 46-P шарнирно соединен на одном конце с кулачковым приводом 40-P и на другом конце с соединительным рычагом 48-P кронштейна 44-P створки.
[0029] Таким образом, свободное падение под действием силы тяжести створки 12-P шасси, инициируемое способом, описанным ранее, будет заставлять кулачковый привод 40-P вращаться вокруг оси A2 в направлении стрелки 41 посредством его взаимодействия с кронштейном 44-P створки шасси посредством соединительного стержня 46-P так, чтобы перемещаться из нерабочего положения, которое показано на фиг. 3, в рабочее положение, которое показано на фиг. 4. Такое вращательное перемещение кулачкового привода 40-P будет, тем самым, вызывать вторую рабочую последовательность, посредством чего дополнительное усилие вызывается кулачковым приводом 40-P на кабель 18-P в направлении стрелки F2-P. Это дополнительное усилие в направлении стрелки F2-P в ответ будет заставлять привод 30a-P запирания дополнительно поворачиваться на угол α2 за пределы диапазона α1 мертвого хода (смотри фиг. 5), тем самым отцепляя крюк 30b-P запирания механизма 30-P запирания от узла 10-P основного шасси левого борта. В связи с этим в этом случае узлу 10-P основного шасси левого борта далее позволяется свободное падение под действием силы тяжести из его убранного положения в его выпущенное положение (т.е. так как такое свободное падение было предварительно позволено ранее в первой последовательности путем работы гидравлического клапана 31-P свободного падения, связанного с гидравлической системой H управления).
[0030] Будет принято во внимание, что синхронизирующий мертвый ход в диапазоне α1, связанном с механизмом 30-P запирания шасси, может быть предварительно установленным с возможностью регулирования так, чтобы позволять значительную задержку по времени между моментом, в который гидравлическое давление, оказываемое механизм 30-P запирания, удаляется путем приведения в действие гидравлического клапана 31-P управления, связанного с гидравлической системой H управления, в ответ на ручное перемещение рычага 14 привода (т.е. во время первой рабочей последовательности), и моментом физического освобождения узла 10-P основного шасси левого борта посредством крюка 30b-P запирания механизма 30-P запирания (т.е. во время второй рабочей последовательности). Такое регулирование может быть достигнуто путем регулируемого перемещения приводного элемента 30a-P и/или посредством систем мертвого хода (например, перемещающегося шкива, связанного с кабелем 18-P). Эта регулируемая задержка по времени освобождения механизма 30-P запирания шасси будет в связи с этим позволять створке 12-P шасси перемещаться посредством свободного падения под действием силы тяжести в ее открытое положение (или по меньшей мере к открытому положению достаточно заблаговременно до свободного падения под действием силы тяжести узла 10-P шасси), чтобы полностью предотвращать заклинивание узла 10-P шасси створкой 12-P, между ними должен возникать физический контакт во время цикла аварийного выпуска шасси.
[0031] Как отмечено ранее, подобные одновременные рабочие последовательности будут происходить с узлами 10-S и 10-N основного шасси правого борта и переднего шасси при рабочем перемещении приводного рычага 14. Таким образом, подобная конструкция и соответственная последовательность будут обеспечены для каждого из узлов 10-S и 10-N так, чтобы позволять их выпуск свободным падением при приведении в действие рычага 14.
[0032] Могут быть предусмотрены различные модификации в пределах компетентности специалистов в области техники. В связи с этим, в то время как изобретение было описано в связи с тем, что в настоящее время рассматривается как наиболее практичный и предпочтительный вариант выполнения, следует понимать, что изобретение не ограничивается раскрытым вариантом выполнения, а наоборот, предназначено для охвата различных модификаций и эквивалентных конструкций, включенных в пределы его сущности и объема охраны.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВАРИЙНЫЙ ПРИВОД ВЫПУСКА ШАССИ | 2022 |
|
RU2780009C1 |
| РЕГУЛИРУЕМЫЙ БЛОК ПЕРЕДАЧИ МОЩНОСТИ ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ САМОЛЕТА | 2023 |
|
RU2814901C1 |
| РЕГУЛИРУЕМЫЙ БЛОК ПЕРЕДАЧИ МОЩНОСТИ ГИДРАВЛИЧЕСКОЙ СИСТЕМЫ САМОЛЕТА | 2023 |
|
RU2814642C1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ СТВОРКОЙ ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРОВАННЫМ УЗЛОМ АВАРИЙНОГО УПРАВЛЕНИЯ | 2016 |
|
RU2720922C2 |
| СИСТЕМА МАНИПУЛИРОВАНИЯ ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА И ЛЕТАТЕЛЬНЫЙ АППАРАТ, СОДЕРЖАЩИЙ ТАКУЮ СИСТЕМУ | 2005 |
|
RU2363617C2 |
| Устройство надувного шасси летательного аппарата | 2017 |
|
RU2678238C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2482021C1 |
| Устройство надувного шасси летательного аппарата | 2017 |
|
RU2678728C1 |
| Устройство поплавка надувного шасси летательного аппарата | 2017 |
|
RU2678243C1 |
| МНОГОЦЕЛЕВОЙ ВЫСОКОМАНЕВРЕННЫЙ СВЕРХЗВУКОВОЙ САМОЛЕТ, ЕГО АГРЕГАТЫ ПЛАНЕРА, ОБОРУДОВАНИЕ И СИСТЕМЫ | 1996 |
|
RU2207968C2 |
Изобретение относится к системе аварийного выпуска узлов убирающегося шасси летательного аппарата (ЛА) под действием силы тяжести. Система аварийного выпуска содержит узел шасси, подвижный между убранным и выпущенным положениями, створку шасси, механизм запирания шасси, который включает в себя привод запирания, а также систему синхронизации. Привод имеет предварительно установленный предел мертвого хода. Система синхронизации функционально соединена с механизмом запирания со створкой шасси. При этом створка шасси перемещается посредством свободного падения под действием силы тяжести к ее открытому состоянию перед перемещением посредством свободного падения под действием силы тяжести шасси к его выпущенному положению. Достигается простота и надежность системы аварийного выпуска шасси под действием силы тяжести. 4 н. и 9 з.п. ф-лы, 6 ил.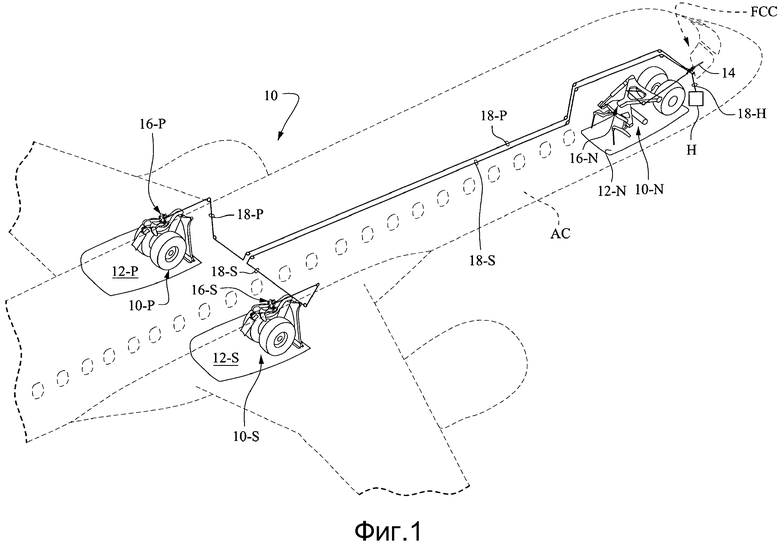
1. Система аварийного выпуска шасси свободным падением под действием силы тяжести для летательного аппарата, содержащая:
узел шасси, подвижный между убранным и выпущенным положениями,
створку шасси, имеющую закрытое состояние, когда узел шасси находится в убранном положении, и подвижную в открытое состояние, чтобы позволять узлу шасси перемещаться в выпущенное положение,
механизм запирания шасси, который включает в себя привод запирания, имеющий предварительно установленный предел мертвого хода такой, что перемещение привода запирания в пределах диапазона мертвого хода предотвращает механизм запирания шасси от физического разблокирования узла шасси, и перемещение привода запирания за пределы мертвого хода разблокирует механизм запирания шасси от узла шасси, и
систему синхронизации шасси в свободном падении, функционально соединенную с механизмом запирания шасси и со створкой шасси, причем система синхронизации шасси в свободном падении включает в себя:
(i) первую рабочую последовательность при приведении в действие системы синхронизации шасси в свободном падении, во время которой привод запирания перемещается в пределах диапазона мертвого хода, тогда как одновременно створка шасси имеет возможность свободного падения под действием силы тяжести из закрытого состояния к своему открытому состоянию, и
(ii) вторую рабочую последовательность, которая выполняется с задержкой по времени относительно начала первой рабочей последовательности, во время которой привод запирания перемещается за пределы мертвого хода, чтобы позволять свободное падение под действием силы тяжести узлу шасси из убранного положения в его выпущенное положение, посредством чего
первая и вторая рабочие последовательности системы синхронизации шасси в свободном падении позволяют створке шасси перемещаться посредством свободного падения под действием силы тяжести к ее открытому состоянию перед перемещением посредством свободного падения под действием силы тяжести шасси к его выпущенному положению.
2. Система выпуска шасси по п.1, в которой система синхронизации шасси в свободном падении содержит:
инициируемый пилотом привод системы и
узел кабеля передачи усилия, функционально взаимосвязывающий привод системы и привод запирания, причем работа привода системы вызывает первую рабочую последовательность системы синхронизации шасси в свободном падении.
3. Система выпуска шасси по п.2, которая дополнительно содержит:
гидравлическую систему управления, выполненную с возможностью позволения свободного падения под действием силы тяжести узлу шасси и створке шасси, причем узел кабеля передачи усилия дополнительно функционально взаимосвязывает привод системы и гидравлическую систему управления так, что работа привода системы гидравлически разъединяет гидравлическую систему управления с узлом шасси и створкой шасси, чтобы позволять их свободное падение под действием силы тяжести.
4. Система выпуска шасси по п.2, в которой система синхронизации шасси в свободном падении дополнительно содержит:
кулачковый привод, функционально взаимодействующий с узлом кабеля передачи усилия и подвижный между нерабочим состоянием и рабочим состоянием, и
соединительный стержень, взаимосвязывающий кулачковый привод и створку шасси, чтобы заставлять кулачковый привод перемещаться соответственно из нерабочего состояния в его рабочее состояние в ответ на перемещение створки шасси из закрытого состояния в ее открытое состояние, причем перемещение кулачкового привода в его рабочее положение вызывает вторую рабочую последовательность системы синхронизации шасси в свободном падении.
5. Система выпуска шасси по п.4, в которой привод системы представляет собой управляемый вручную рычаг.
6. Система выпуска шасси по п.5, в которой управляемый вручную рычаг содержит:
рукоятку рычага,
вращаемый стержень привода,
установочное основание для установки рукоятки рычага на стержень привода, и
привод кабеля, поддерживаемый стержнем привода и соединенный с проксимальным концом узла кабеля.
7. Система аварийного выпуска шасси свободным падением под действием силы тяжести, содержащая систему синхронизации шасси в свободном падении, обеспечивающую свободное падение под действием силы тяжести узла шасси летательного аппарата с задержкой по времени относительно свободного падения под действием силы тяжести створки шасси, связанной с узлом шасси, причем система синхронизации шасси в свободном падении включает в себя:
(a) инициируемый пилотом привод системы,
(b) узел кабеля передачи усилия, имеющий один конец, соединенный с приводом системы, и противоположный конец, соединенный с приводом запирания, функционально связанного с механизмом запирания шасси узла шасси,
(c) кулачковый привод, функционально взаимодействующий с узлом кабеля передачи усилия и шарнирно подвижный между нерабочим состоянием и рабочим состоянием, и
(d) соединительный стержень, взаимосвязывающий кулачковый привод и створку шасси, чтобы заставлять кулачковый привод перемещаться соответственно из нерабочего состояния в его рабочее состояние в ответ на перемещение створки шасси из закрытого состояния в ее открытое состояние, и
(e) систему задержки по времени, имеющую первую рабочую последовательность, которая позволяет створке шасси свободно падать под действием силы тяжести в открытое положение, и вторую рабочую последовательность, которая выполняется с задержкой по времени от начала первой рабочей последовательности, чтобы позволять свободное падение под действием силы тяжести узлу шасси.
8. Система выпуска шасси по п.7, в которой система задержки по времени содержит:
привод запирания, имеющий диапазон мертвого хода, в пределах которого механизм запирания остается физически соединенным с узлом шасси во время первой рабочей последовательности, и
гидравлическую систему управления, которая позволяет створке шасси свободно падать под действием силы тяжести из закрытого состояния к ее открытому состоянию во время первой рабочей последовательности, и причем вторая рабочая последовательность вызывается кулачковым приводом, шарнирно перемещающимся в ответ на свободное падение под действием силы тяжести створки шасси к ее открытому положению так, чтобы оказывать усилие на кабель передачи, тем самым в ответ перемещая привод запирания за пределы диапазона мертвого хода, тем самым физически разъединяя механизм запирания с узлом шасси, чтобы позволять свободное падение под действием силы тяжести узлу шасси к его выпущенному положению, посредством чего свободное падение под действием силы тяжести узла шасси к его выпущенному положению выполняется с задержкой по времени относительно свободного падения под действием силы тяжести створки шасси к ее открытому состоянию.
9. Система выпуска шасси по п.8, в которой гидравлическая система управления содержит гидравлический клапан управления, и в которой узел кабеля передачи усилия дополнительно функционально взаимосвязывает привод системы и гидравлический клапан управления так, что работа привода системы гидравлически разъединяет гидравлическую систему управления с узлом шасси и створкой шасси, чтобы позволять их свободное падение под действием силы тяжести.
10. Система выпуска шасси по п.7, в которой привод системы представляет собой управляемый вручную рычаг.
11. Система выпуска шасси по п.10, в которой управляемый вручную рычаг содержит:
рукоятку рычага,
вращаемый стержень привода,
установочное основание для установки рукоятки рычага на стержень привода, и
привод кабеля, поддерживаемый стержнем привода и соединенный с проксимальным концом узла кабеля.
12. Летательный аппарат, который содержит систему аварийного выпуска шасси свободным падением под действием силы тяжести по п.1.
13. Летательный аппарат, который содержит систему аварийного выпуска шасси свободным падением под действием силы тяжести по п.7.
| US 6027070 A, 22.02.2000 | |||
| US 2013221159 A1, 29.08.2013 | |||
| US 2011024557 A1, 03.02.2011 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЗАМКАМИ ШАССИ САМОЛЕТА | 1999 |
|
RU2164879C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЗАМКАМИ ШАССИ САМОЛЕТА | 2004 |
|
RU2290347C2 |

