Данное техническое решение относится к цифровой вычислительной технике, а именно к цифровым вычислительным системам для получения и обработки радиолокационной информации, и может быть использовано в пунктах управления частями и подразделениями противовоздушной обороны (ПВО) для автоматизированного сопровождения воздушных объектов (ВО) и управления огневыми средствами.
Известен комплекс средств автоматизации командного пункта тактического соединения по патенту РФ на полезную модель [1], содержащий комплекс средств передачи данных и телефонных линий для связи с внешними абонентами, ЭВМ автоматизированных рабочих мест (АРМ), объединенные локальной вычислительной сетью (ЛВС), средства документирования.
Недостатками этого комплекса являются:
- отсутствие средств радиосвязи;
- отсутствие возможности получения информации о ВО от аналоговых радиолокационных станций (РЛС) и/или подвижных радиовысотомеров (ПРВ);
- отсутствие средств объективного контроля в каналах речевой связи.
Наиболее близким по функциональным возможностям и составу технических средств является комплекс технических средств автоматизации управления по патенту РФ на полезную модель [2].
Данный комплекс содержащий АРМ, объединенные ЛВС, радиостанции, пульт управления, средства обмена данными (СОД), антенны, проводные линии связи, станцию электроснабжения (СЭС), источник вторичного электропитания, аппаратуру спутниковых навигационных систем (СНС), периферийные устройства, позволяет обеспечить оперативной связью должностных лиц органов управления с подчиненными взаимодействующими подразделениями.
Недостатками известного технического решения являются:
- отсутствие возможности получения информации о ВО от аналоговых РЛС и/или ПРВ;
- отсутствие средств объективного контроля в каналах речевой связи.
Задачей предлагаемого технического решения является создание комплекса технических средств автоматизации управления обеспечивающего дополнительные возможности, а именно:
- получение информации о ВО от аналоговых РЛС и/или ПРВ;
- осуществление регистрации, хранения и воспроизведения всех телефонных переговоров, то есть объективного контроля в каналах речевой связи.
Для решения поставленной задачи комплекс технических средств автоматизации управления, содержащий автоматизированные рабочие места (АРМ), каждое из которых содержит ПЭВМ типа ноутбук, станции электроснабжения (СЭС), блок навигационный, периферийные устройства, радиостанции, вторичный источник питания (ВИП), аппаратуру передачи данных (АПД) дополнительно снабжают аппаратурой сопряжения первичной обработки и отображения (АСПО) аналоговой радиолокационной информации. В АСПО входят два блока сопряжения и преобразования (БСП), блок первичной обработки (БПО), блок совмещения видео и графической информации (БСВГИ).
В состав АРМ обработки радиолокационной информации (АРМ-ОРЛИ) входит одноплатная ПЭВМ, монитор и клавиатура. Каждое АРМ 11 - АРМ 1n и АРМ-ОРЛИ дополнительно в своем составе содержат пульт связи (ПС), аппаратуру передачи данных (АПД), схему защиты линий (СЗЛ).
Первые входы всех ПЭВМ, ПС и АПД подключены к выходам соответствующих ВИП. Второй вход-выход АПД подключен к третьему входу-выходу соответствующих ПЭВМ, четвертые входы-выходы которых подключены к ЛВС. Третьи группы входов-выходов АПД подключены к выходам СЗЛ, входы которых являются входами-выходами комплекса для подключения внешних абонентов по каналам АПД. Пятый вход-выход ПЭВМ АРМ-ОРЛИ подключен к клавиатуре с манипулятором, а шестой и седьмой -к первому и второму входам-выходам БСВГИ, третий выход которого подключен к второму входу монитора. Первый вход монитора подключен к выходу ВИП. Четвертый и пятый входы БСВГИ подключены к первому и второму выходам БПО, а шестой вход к выходу ВИП. Третий вход БПО подключен к выходу ВИП, четвертый вход-выход БПО подключен к восьмому входу-выходу ПЭВМ АРМ-ОРЛИ. Пятый и шестой входы-выходы БПО к первым входам-выходам первого и второго БСП, вторые группы входов-выходов которых являются входами-выходами АСПО для подключения к соответствующим входам-выходам аналоговых радиолокационных станций (РЛС) или подвижных радиовысотомеров (ПРВ).
Также в комплекс введен модуль связи, содержащий коммутатор связи, концентратор ЛВС, вторичный источник питания (ВИП), первые входы-выходы коммутатора связи и концентратора ЛВС подключены к ЛВС, а их вторые входы - к выходу ВИП, первые входы-выходы радиостанций подключены соответственно к третьему и четвертому входам-выходам коммутатора связи, а их вторые входы - к выходу ВИП.
Кроме того предложенный комплекс технических средств автоматизации управления отличается тем, что все АРМ размещены в ударопрочных пластиковых кейсах и их количество может изменяться от одного до n+1, при этом все функциональные возможности комплекса сохраняются. Кроме того электропитание всех составных частей комплекса, кроме периферийных устройств, осуществлено как напряжением ~220 В, 50 Гц, так и постоянным напряжением 12-36 В. БСП подключены к БПО с помощью волоконно-оптических линий связи (ВОЛС). В состав каждого АРМ 11 - АРМ 1n и АРМ-ОРЛИ входит ВИП.
Именно это позволяет сделать вывод о наличии причинно-следственной связи между совокупностью существенных признаков заявляемого технического решения и достигаемым техническим результатом.
Техническая сущность предложенного технического решения поясняется чертежами на которых:
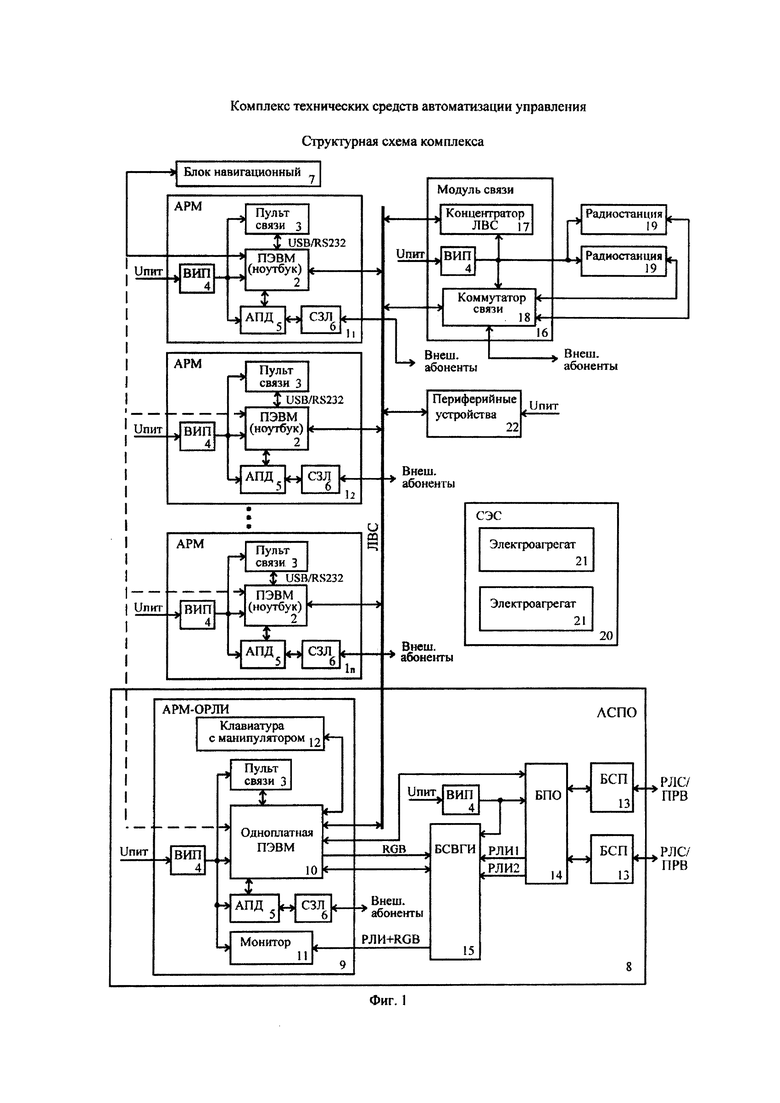
Фиг. 1 приведена структурная схема комплекса средств автоматизации управления.
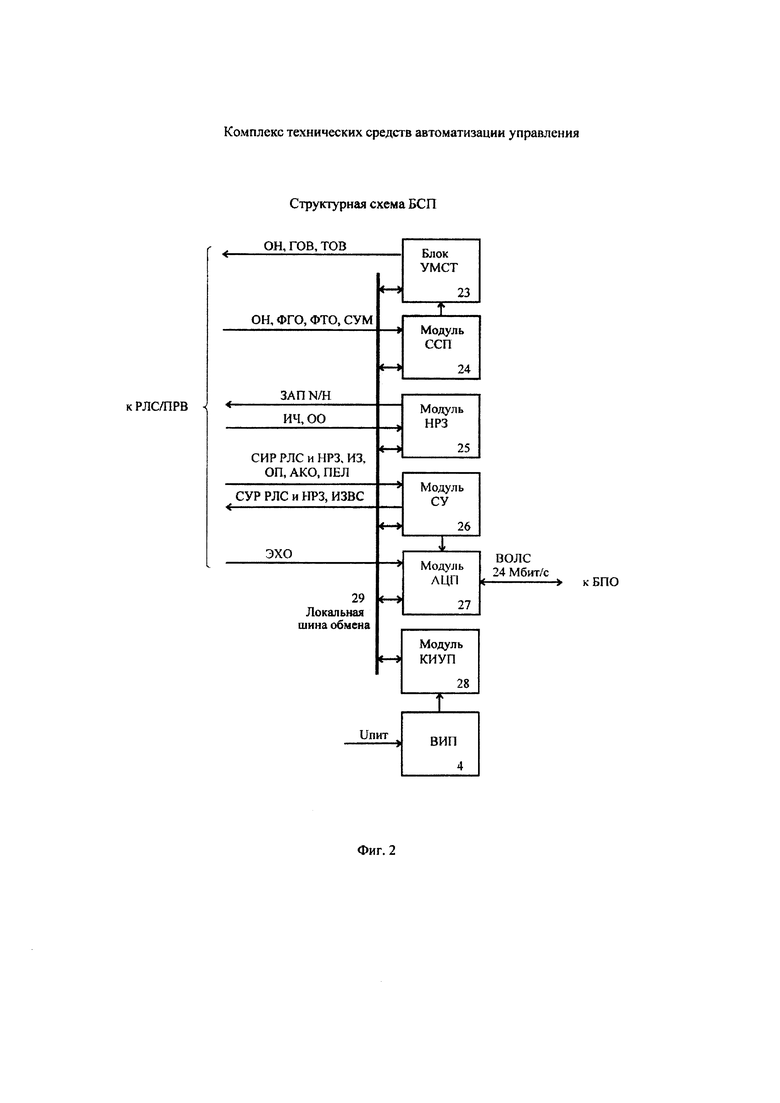
Фиг. 2 приведена структурная схема БСП.
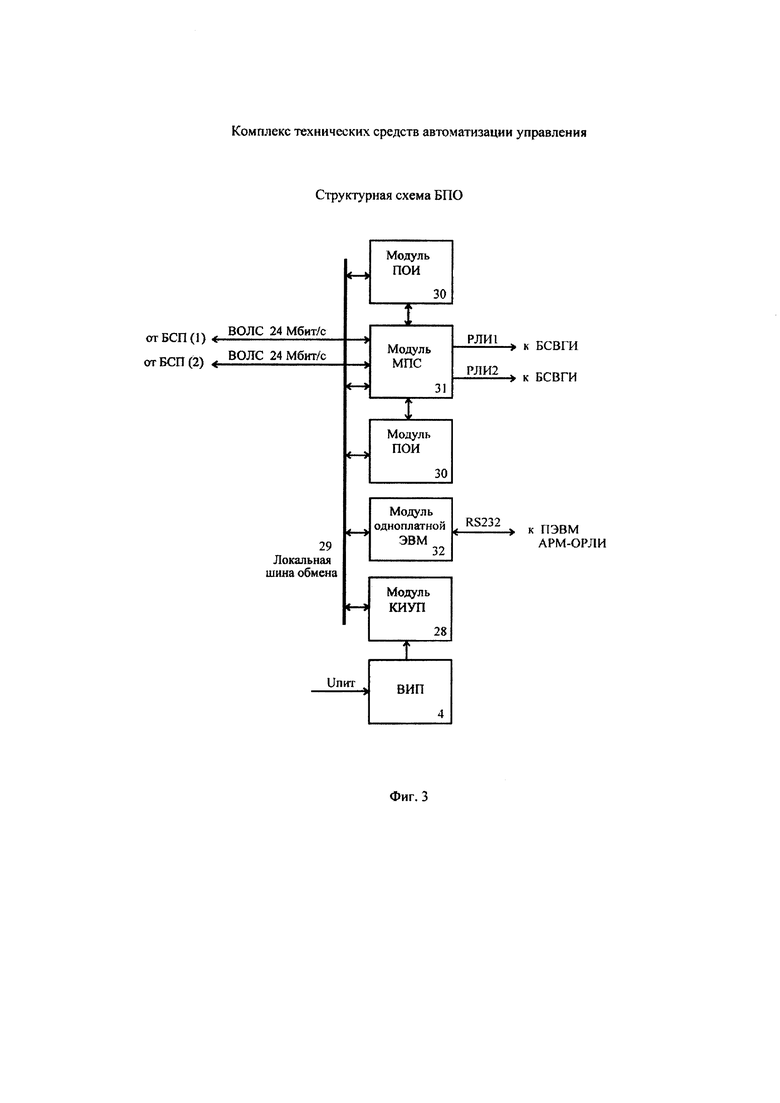
Фиг. 3 приведена структурная схема БПО.
Комплекс технических средств автоматизации управления (фиг. 1) содержит в своем составе автоматизированные рабочие места АРМ 11 - АРМ 1n, каждое из которых содержит ПЭВМ типа ноутбук 2, пульт связи 3, ВИП 4, АПД 5, схему защиты линий СЗЛ 6, блок навигационный 7, подключаемый к любому АРМ 11 - АРМ 1n или АРМ-ОРЛИ 8, аппаратуру АСПО 9, содержащую АРМ-ОРЛИ 8 в состав которой входит одноплатная ПЭВМ 10, монитор 11, клавиатура с манипулятором 12, пульт связи 3, ВИП 4, АПД 5 и СЗЛ 6. В состав аппаратуры АСПО 9 входит два БСП 13, БПО 14, БСВГИ 15, ВИП 4. Кроме того комплекс содержит модуль связи 16, содержащий концентратор ЛВС 17, коммутатор связи 18, ВИП 4. В состав комплекса входят две радиостанции 19, СЭС 20 содержащую два электроагрегата 21, периферийные устройства 22 (два принтера форматов A3 и A4).
БСП 13 (фиг. 2) содержит модуль усилителя мощности с трансформаторными выходами (модуль УМСТ) 23, модуль преобразования сигналов синхронно-следящего привода (модуль ССП) 24, модуль обработки информации наземного радиозапросчика (модуль НРЗ) 25, модуль согласования и управления (модуль СУ) 26, модуль АЦП 27, модуль контроля и управления электропитанием (модуль КИУП) 28, локальную шину обмена 29, ВИП 4.
БПО 14 (фиг. 3) содержит два идентичных модуля первичной обработки РЛИ (модули ПОИ) 30, модуль преобразования стыков цифровых и оптических линий связи РЛИ (модуль МПС) 31, модуль одноплатной ЭВМ 32, локальную шину обмена 29, модуль КИУП 28, ВИП 4.
Программное обеспечение (ПО) комплекса технических средств автоматизации управления обеспечивает его работу в боевом, дежурном и режиме тренажа.
Каждое АРМ 11 - АРМ 1n, включая АРМ-ОРЛИ 8, может работать в режимах сервера и АРМ.
В комплексе только одно из АРМ должно работать в режиме сервера. Это АРМ является главным для комплекса. Остальные АРМ функционируют в режиме АРМ.
Одно из АРМ, функционирующих в режиме АРМ, выполняет функции резервного сервера, т.е. на него происходит автоматическое копирование данных с флэш диска основного сервера. При выходе из строя основного сервера данное АРМ может быть переведено в режим сервера без потери данных.
АРМ, работающий в режиме сервера (далее по тексту сервер), обеспечивает:
- прием и передачу информации (РЛИ и команд управления) от АПД / к АПД соответственно;
- регистрацию и хранение поступившей, обработанной информации, а также информации, введенной оператором;
- отождествление информации, принимаемой от разных источников РЛИ;
- преобразование и отображение принимаемой информации на своем мониторе;
- ввод и отображение команд управления и дополнительной информации от оператора;
- передачу по ЛВС Ethernet обработанной информации на все АРМ;
- функциональный контроль аппаратуры комплекса.
Все АРМ, работающие в режиме АРМ, включая АРМ-ОРЛИ, обеспечивают:
- отображение подготовленной на сервере информации;
- ввод команд управления и дополнительной информации от оператора в вычислительный комплекс.
Комплекс технических средств автоматизации управления работает следующим образом.
С помощью блока навигационного 7 (Фиг. 1), подключенного к любому из АРМ 11 - АРМ 1n и АРМ-ОРЛИ 8, осуществляется автоматическое определение и ввод в вычислительный комплекс координат его местоположения в выбранной системе, сигналов точного времени.
Прием цифровой РЛИ от внешних абонентов (вышестоящего, взаимодействующих и подчиненных пунктов управления) происходит в следующем порядке.
Из каналов связи РЛИ через СЗЛ 6 поступает в АПД 5 АРМ 11 - АРМ 1n, АРМ-ОРЛИ 8 и далее по интерфейсу RS232 - в соответствующие ПЭВМ 2, ПЭВМ 10. СЗЛ 6 осуществляет защиту АПД 5 от импульсов высокого напряжения, наводимых в проводных линиях связи. От ПЭВМ 2, ПЭВМ 10 по ЛВС Ethernet, принятая РЛИ поступает в сервер. Сервер осуществляет преобразование получаемой РЛИ (пересчет координат воздушных объектов (ВО) относительно своего местоположения, отождествление РЛИ, получаемой от разных источников), регистрацию, хранение, отображение информации о ВО на своем мониторе и передачу преобразованной информации по ЛВС Ethernet на ПЭВМ 2 и ПЭВМ 10 для ее отображения на мониторах остальных АРМ, при этом информация о ВО поступает на монитор 11 АРМ-ОРЛИ 8 через БСВГИ 15, который, при отсутствии аналоговой РЛИ, просто транслирует информацию от ПЭВМ 10.
Для передачи РЛИ внешним абонентам в сервере, к РЛИ добавляются команды управления, и другая дополнительная информация от операторов АРМ в зависимости от уровней подчиненности и типов взаимодействующих пунктов управления. Подготовленная для передачи РЛИ регистрируется, и по ЛВС Ethernet поступает в соответствующие ПЭВМ 2 АРМ 11 - АРМ 1n и ПЭВМ 10 АРМ-ОРЛИ 8, которая затем по интерфейсу RS232 передается в соответствующие АПД 5. С выходов АПД 5 цифровая РЛИ, пройдя через СЗЛ 6, передается внешним абонентам в режиме реального масштаба времени.
СЗЛ 6 представляет собой многоступенчатую схему и содержит разрядники, ограничительные диоды, токоограничивающие резисторы, подключенные к каждой двухпроводной линии.
Для обеспечения возможности получения информации о ВО от аналоговых РЛС и/или ПРВ) комплекс содержит АСПО 9, в котором каждый БСП 13 размещается в непосредственной близости от соответствующих РЛС/ПРВ и подключаются к ним посредством типовых кабелей. БСП 13 в режиме РЛС выполняет следующие функции:
- автоматическую настройку режимов работы модулей в соответствии с установленным типом РЛС;
- формирование сигналов необходимых для управления режимами РЛС;
- прием сигналов состояния РЛС;
- определение азимутального положения антенны РЛС (с точностью не хуже 5');
- задание режимов запроса наземного радиозапросчика;
- прием, обработку полетной информации об индивидуальном номере, высоте, запасе топлива, государственной принадлежности, признаке бедствия ВО с селекцией по углу азимута, по дальности и по виду запроса;
- аналого-цифровое преобразование ЭХО-сигнала (сигнала, отраженного от ВО) в код;
- нормирование аналоговых сигналов ОП (сигнал общего опознавания), АКО (сигнал активного ответа) и ПЕЛ (сигнал «Пеленг»);
- формирование группового сигнала;
- выдачу группового сигнала в оптический канал передачи;
- декодирование группового сигнала оптического канала приема, определение ошибок и распределение команд по функциональным узлам;
- дистанционный функциональный контроль модулей.
БСП 13 в режиме ПРВ выполняет следующие функции:
- автоматическую настройку режимов работы модулей в соответствии с установленным типом ПРВ;
- формирование сигналов необходимых для управления режимами ПРВ;
- прием сигналов состояния ПРВ;
- определение азимутального положения антенны ПРВ (с точностью не хуже 5');
- вывод антенны ПРВ на заданное азимутальное положение (с точностью не хуже 0,5°);
- определение угломестного положения антенны ПРВ (с точностью не хуже 5');
- аналого-цифровое преобразование ЭХО-сигнала (сигнала, отраженного от ВО) в код;
- согласование уровней сигналов управления ПРВ;
- преобразование сигналов узла синхронно-следящего привода (ССП) и узла синусно-косинусного вращающихся трансформаторов (СКВТ) в цифровой код положения антенны ПРВ (код угла азимута и код угла места антенны ПРВ);
- формирование опорного напряжения питания (ОН) узла ССП и СКВТ, формирование сигналов управления грубого вывода (ГОВ) и точного вывода (ТОВ) антенны ПРВ;
- формирование группового сигнала и его выдачу в оптический канал передачи;
- декодирование группового сигнала оптического канала приема, определение ошибок и распределение команд по функциональным узлам;
- дистанционный функциональный контроль модулей.
Модуль АЦП 27 (Фиг. 2) - модуль контроллера - осуществляет аналого-цифровое преобразование координатных сигналов ЭХО, общего опознавания (ОП), активного ответа (АКО), пеленг (ПЕЛ), управление и обмен данными между модулями по локальной шине обмена, обеспечивает формирование и передачу группового сигнала к БПО 14 (Фиг. 1) по ВОЛС (волоконно-оптическая линия связи), прием команд управления от БПО по ВОЛС.
Модуль ССП 24 обеспечивает согласование уровней и преобразование сигналов синхронно-следящего привода (привод ССП) - ОН (опорное напряжение), ФГО (фаза грубого отсчета), ФТО (фаза точного отсчета), СУМ (синус угла места) в цифровой код угла азимута антенны РЛС/ПРВ, согласование уровней и преобразование сигналов привода синусно-косинусного вращающегося трансформатора (привод СКВТ) в цифровой код угла места антенны ПРВ, формирование опорного напряжения (ОН) для приводов ССП РЛС/ПРВ и СКВТ ПРВ и формирование сигналов управления выводом антенны ПРВ (ГОВ, ТОВ).
Блок УМСТ 23 обеспечивает усиление и гальваническую развязку опорного напряжения (ОН) и сигналов управления выводом антенны ПРВ (ГОВ, ТОВ).
Модуль СУ 26 обеспечивает прием и согласование уровней выходных сигналов РЛС/ПРВ - СИР РЛС и НРЗ (сигналы индикации режимов РЛС и НРЗ), ИЗ (сигнал импульса запуска), ОП (сигнал общего опознавания), АКО (сигнал активного ответа), ПЕЛ (сигнал «Пеленг») с требуемыми уровнями сигналов для модулей обработки, формирование сигналов управления режимами РЛС/ПРВ и наземного радиозапросчика РЛС - СУР РЛС и НРЗ (сигналы управления режимами РЛС и НРЗ), ИЗВС (сигнал импульса запуска внешней синхронизации).
Модуль НРЗ 25 - модуль обработки информации наземного радиозапросчика - обеспечивает сопряжение со стыком ИО-4 аппаратуры из состава НРЗ типа «Пароль», прием, декодирование и обработку поступающей полетной информации (индивидуальный номер или высота, признак высоты, запас топлива ВО и признак бедствия, в зависимости от вида запроса).
ВИП 4 - вторичный источник электропитания с элементами защиты и фильтрации с возможностью выбора входного напряжения ~220 В, 50 Гц или постоянного напряжения 12-36 В - обеспечивает формирование выходного постоянного напряжения 27 В.
Модуль КИУП 28 обеспечивает формирование всех необходимых уровней питающего напряжения из выходного напряжения ВИП 4 и содержит схему контроля, которая производит отключение БСП при пропадании одного из питающих напряжений.
БПО 14 (Фиг. 1) обеспечивает:
- прием РЛИ по двум оптическим каналам (ВОЛС);
- ретрансляцию РЛИ в БСВГИ;
- коммутацию РЛИ, поступающей от разных источников, на вход БСВГИ;
- первичную обработку РЛИ, результатом которой являются координаты ВО в полярной системе координат (азимут-дальность для РЛС, угол места-дальность для ПРВ);
- передачу обработанной РЛИ, кода состояния РЛС и ПРВ, информации НРЗ и состояния модулей из состава БСП и БПО по интерфейсу RS232 в ПЭВМ 10 АРМ-ОРЛИ 8 для дальнейшей обработки;
- получение от ПЭВМ 10 АРМ-ОРЛИ 8 команд управления БСП 13 и РЛС.
Модуль МПС 31 (Фиг. 3) - модуль преобразования стыков цифровых и оптических линий РЛИ - обеспечивает прием (от БСП) и передачу РЛИ (к БСП) по ВОЛС, ретрансляцию РЛИ по проводным линиям в БСВГИ 15 (Фиг. 1), преобразование сигналов ТТЛ уровня в сигналы для передачи по ВОЛС и проводным линиям, и обратного преобразования.
Модули ПОИ 30 (Фиг. 3) - модули первичной обработки РЛИ (каждый для своего канала) - обеспечивают преобразование РЛИ, получаемой от модуля МПС в координаты ВО в полярной системе координат (угол азимута-дальность относительно точки стояния РЛС, угол места-дальность относительно точки стояния ПРВ).
Модуль одноплатной ЭВМ 32 - модуль контроллера на базе ЭВМ - обеспечивает управление и обмен данными между модулями ПОИ 30 по локальной шине обмена, передачу координат ВО по интерфейсу RS232 в ПЭВМ 10 АРМ-ОРЛИ 8.
БСВГИ 15 по патенту РФ на полезную модель [3] предназначен для совмещения аналоговой РЛИ с графической информацией, синтезированной ПЭВМ 10 АРМ-ОРЛИ 8 и обеспечивает:
- прием и отображение первичной РЛИ с сопровождающими сигналами управления по двум идентичным каналам и выбор отображаемой первичной информации;
- синхронное и синфазное с антенной РЛС вращение радиально-круговой развертки при работе с РЛС;
- отображение на экране монитора первичной информации в системе координат дальность (D) - синус угла места(sinε) при работе с ПРВ. Ось (sinε) направлена вертикально вверх. Пределы изменения от sin -3° до sin 45°. Ось D направлена горизонтально, ширина зоны по дальности - 12,8 км, разрешение ~ 100 м;
- установку масштабов дальности по отображению 50, 100, 150, 200, 250, 300…800 км. Разрешающая способность по дальности - от ~600 м на пиксел (для масштаба 300 км), до ~100 м на пиксел (для масштаба 50 км);
- бланкирование первичной информации в виде кругового бланка в центре развертки задаваемого дискретно через 1 км с радиусом <50 км, кругового бланка по дальности, задаваемого дискретно через 1 км и секторных бланков, задаваемых дискретно через 1,3 градуса - до шести;
- режим послесвечение -изменение яркости свечения отметок РЛИ от времени;
- установку порога и регулировку яркости свечения аналоговой информации на экране монитора с дискретностью 1 в диапазоне от 0 до 255;
- совмещение аналоговой РЛИ (от РЛС и ПРВ) и графической информации, синтезированной сервером и отображение совмещенной информации на экране монитора АРМ-ОРЛИ 8.
От БПО 14 (Фиг. 1) обработанная РЛИ, содержащая координаты ВО в полярной системе координат (азимут-дальность для РЛС, угол места-дальность для ПРВ), коды состояния РЛС и ПРВ, информацию НРЗ и коды состояния модулей, из состава БСП и БПО по интерфейсу RS232 поступает в ПЭВМ 10 АРМ-ОРЛИ 8, затем по ЛВС Ethernet поступает в сервер для дальнейшей обработки. Сервер осуществляет декодирование получаемой информации, производит преобразование координат ВО из полярной системы координат в декартовую и добавляет преобразованную информацию к имеющейся цифровой РЛИ. Обобщенная РЛИ раздается по ЛВС Ethernet всем АРМ для отображения на соответствующих мониторах и передачи внешним абонентам по каналам АПД 5.
Реализованный в предлагаемом комплексе технических средств автоматизации управления модуль связи обеспечивает:
- внутреннюю телефонную связь (избирательную и циркулярную) между пультами связи 3;
- телефонную связь между пультами связи 3 и внешними абонентами по принципу «любой - с любым»;
- радиотелефонную связь с внешними абонентами с помощью радиостанций;
- регистрацию, хранение и воспроизведение всех телефонных переговоров, ведущихся с пультов связи (объективный контроль).
Для организации избирательной связи как внутренней, так и с внешними абонентами, каждому пульту связи, радиостанции, линии связи (внешнему абоненту) присваивается индивидуальный код адреса, в соответствии с которыми обеспечивается их подключение.
Внутренняя телефонная связь обеспечивается с помощью пультов связи 3 и соответствующих ПЭВМ 2, ПЭВМ 10.
Пульт связи 3 обеспечивает:
- набор кода адреса абонента с помощью клавиатуры;
- прием от микрофона телефонной трубки или гарнитуры аналоговых речевых сигналов, их усиление, преобразование в цифровую форму и передачу по интерфейсу USB или RS232 в соответствующую ПЭВМ 2 и ПЭВМ 10;
- прием от ПЭВМ 2 и ПЭВМ 10 по интерфейсу USB или RS232 речевой информации в виде цифровых пакетов, их преобразование в аналоговую форму, усиление и передачу в телефон гарнитуры или телефонной трубки.
Преобразование аналогового сигнала в цифровой код и обратно осуществляется с помощью импульсно-кодового модулятора-кодера-фильтра-декодера (ИКМ-кофидек), например 5512ПП1Р/ТБМ [4].
Внутренняя телефонная связь осуществляется следующим образом:
- от микрофона передающего пульта связи 3 после усиления и преобразования в цифровую форму речевая информация по интерфейсу USB или RS232 поступает в соответствующую ПЭВМ 2 и ПЭВМ 10, регистрируется в долговременной памяти ПЭВМ;
- от ПЭВМ 2 и ПЭВМ 10 по ЛВС Ethernet информация в соответствии с кодом адреса принимающего пульта связи 3 поступает в соответствующую ПЭВМ 2 и ПЭВМ 10, регистрируется в долговременной памяти;
- от ПЭВМ 2 и ПЭВМ 10 по интерфейсу USB или RS232 информация поступает в пульт связи 3, где преобразуется в аналоговый речевой сигнал, который после усиления поступает в телефон гарнитуры или телефонной трубки.
В обратную сторону речевая информация проход аналогичным путем.
В случае выбора режима циркулярной связи на передающем пульте связи 3, информация по ЛВС Ethernet поступает одновременно на все ПЭВМ 2 и ПЭВМ 10.
Таким образом речевая информация, попадая в ПЭВМ 2 и ПЭВМ 10, регистрируется и может быть воспроизведена при необходимости.
Телефонная связь с внешними абонентами обеспечивается с помощью пультов связи 3, соответствующих ПЭВМ 2 и ПЭВМ 10 и коммутатора связи 18.
Коммутатор связи 18 обеспечивает:
- управление коммутацией пультов связи 3 с внешними абонентами от ПЭВМ 2 и ПЭВМ 10 по ЛВС Ethernet;
- подключение m внешних абонентов по 2-х проводным линиям связи;
- подключение и управление режимами работы (передача/прием) двух радиостанций;
- прием по ЛВС Ethernet в цифровой форме речевой информации от пультов связи 3, ее преобразование в аналоговые сигналы и их передачу по 2-x проводным линиям связи внешним абонентам;
- формирование сигналов индукторного вызова и их передачу по 2-х проводным линиям связи внешним абонентам;
- прием из линий связи сигналов индукторного вызова от внешних абонентов;
- прием из линий связи от внешних абонентов речевой информации в аналоговой форме, ее преобразование в цифровую форму и передачу по ЛВС Ethernet к соответствующим пультам связи 3;
- защиту аппаратуры коммутатора от наводимых в проводных линиях связи импульсов высокого напряжения.
- функциональный контроль входящих в него модулей и передачу результатов контроля по ЛВС Ethernet - в ПЭВМ 2 и ПЭВМ 10.
В коммутаторе связи 18 преобразование аналоговых сигналов, принимаемых от внешних абонентов по проводным линиям связи в - цифровые коды и обратно осуществляется с помощью ИКМ-кофидеков аналогично преобразованиям в пультах связи 3.
Установка требуемых соединений между пультами связи 3 и внешними абонентами осуществляется на одном из АРМ или АРМ-ОРЛИ 8 в режиме работы «Управление связью» с помощью графического интерфейса, после чего АРМ переводится в режим «Боевое управление» и функционирует также как и остальные АРМ.
Установленные соединения в коммутаторе связи 18 сохраняются при отключении электропитания комплекса.
Прохождение речевой информации с помощью коммутатора связи 18 от пультов связи 3 к внешним абонентам и обратно и ее регистрация в ПЭВМ 2 и ПЭВМ 10 происходит аналогично прохождению и регистрации информации как между двумя пультами связи 3.
Таким образом в предлагаемом комплексе технических средств автоматизации управления обеспечивается объективный контроль всей входящей и исходящей речевой информации.
ВИП 4 выполнен по классической схеме на базе серийно выпускаемых модулей питания типа AC/DC и DC/DC требуемой мощности, выходы которых объединены по схеме «ИЛИ».
Электропитание комплекса технических средств автоматизации управления, за исключением БСП осуществляется от одного электроагрегата 21 из состава СЭС 20. В случае невозможности электропитания БСП от РЛС/ПРВ, их электропитание осуществляется от второго электроагрегата 21. В качестве электроагрегатов могут использоваться любые автономные бензиновые или дизельные электроагрегаты соответствующей мощности с выходным напряжением ~220 В, 50 Гц или с постоянным напряжением 12-36 В. В качестве источника электроэнергии может также использоваться автомобильная борт-сеть напряжением 12/24 В или промышленная сеть ~220 В, 50 Гц.
Предлагаемый комплекс технических средств автоматизации управления может быть использован в оперативном или тактическом звене управления частями и подразделениями ПВО.
Комплекс технических средств автоматизации управления может функционировать как автономно, так и в составе других комплексов, расширяя их функциональные возможности, при этом их взаимодействие осуществляется по ЛВС Ethernet и/или по каналам АПД реального масштаба времени.
В зависимости от объема решаемых задач, количество АРМ в составе комплекса технических средств автоматизации управления может изменяться от одного (например только АРМ-ОРЛИ) до n+1, при этом сохраняются все функциональные возможности комплекса. Комплекс технических средств автоматизации управления обеспечивает решение следующих задач:
- прием от спутниковых навигационных систем (СНС) и автоматический ввод географических координат и сигналов точного времени в вычислительный комплекс;
- информационный обмен радиолокационной информацией и командами управления с вышестоящими, взаимодействующими и подчиненными объектами одновременно по (n+1)×N телекодовым каналам связи АПД реального масштаба времени, где (n+1) - количество АРМ+АРМ ОРЛИ, N - количество каналов в каждом АПД, при условии использований многоканальной АПД;
- решение задач отождествления воздушных объектов (ВО) по информации, поступающей от разных источников РЛИ;
- решение задач группирования ВО с близкими характеристиками;
- решение задач целераспределения и целеуказания;
- реализацию m телефонных каналов с внешними абонентами по двухпроводным линиям связи;
- реализацию двух радиотелефонных каналов с внешними абонентами;
- сопряжение с двумя аналоговыми РЛС или с РЛС и ПРВ;
- преобразование поступающих от РЛС или ПРВ эхо-сигналов в цифровую форму, определение первичных координат воздушных объектов (ВО) и сигналов общего опознавания;
- преобразование сигналов сельсин-датчиков синхронно-следящего привода (ССП) антенны РЛС (ПРВ) в код азимута антенны;
- формирование и выдачу на наземный радиозапросчик (НРЗ) команд управления режимами общего опознавания;
- формирование команд управления разворотом антенны ПРВ и выдачу на ПРВ сигналов рассогласования азимута антенны;
- формирование видеоинформации двух независимых образов воздушной обстановки от аналоговых РЛС;
- совмещение видеоинформации образов воздушной обстановки от аналоговых РЛС с графической информацией воздушной обстановки, синтезированной процессором сервера, и отображение совмещенной РЛИ на экране видеомонитора;
- регистрацию всей входящей и исходящей телекодовой информации с возможностью ее последующего просмотра на экране видеомонитора и документирование на бумажном носителе с помощью принтеров;
- регистрацию, хранение, воспроизведение всех телефонных переговоров (объективный контроль);
- диагностирование работоспособности технических средств комплекса до сменного модуля.
Предлагаемый комплекс технических средств автоматизации управления, благодаря размещению его составных частей в ударопрочных пластиковых кейсах и шкафах-контейнерах, легко транспортируется, является быстроразворачиваемым за счет минимального количества межблочных связей (кабели ЛВС Ethernet, кабели электропитания).
Комплекс технических средств автоматизации управления промышленно реализуем, обладает расширенными функциональными возможностями, а именно возможностями получения информации о ВО от аналоговых РЛС и/или ПРВ и регистрации, хранения и воспроизведения всех телефонных переговоров, то есть объективного контроля в каналах речевой связи.
Источники информации
1. Патент РФ на полезную модель №41889, G06F 15/16, 2004 г. «Комплекс средств автоматизации командного пункта тактического соединения». Опубликовано 10.11.2004, бюллетень «Изобретения, полезные модели».
2. Патент РФ на полезную модель №133631, G06F 13/00, 2012 г. «Комплекс технических средств автоматизации управления». Опубликовано 20.10.2013, бюллетень «Изобретения, полезные модели».
3. Патент РФ на полезную модель №81342, G01S 7/12, 2008 г. «Блок совмещения видео - и графической информации». Опубликовано 10.03.2009, бюллетень «Изобретения, полезные модели».
4. ИКМ-кофидек 5512ПП1Р/ТБМ - w.w.w.integral.by/?section_id=115.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЬ ПЛАНИРОВАНИЯ | 2009 |
|
RU2415456C1 |
| АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2001 |
|
RU2219586C2 |
| Система обработки радиолокационной информации | 2023 |
|
RU2815274C1 |
| ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС РЕГИСТРАЦИИ И СИНТЕЗА РАДИОТЕХНИЧЕСКИХ СИГНАЛОВ | 2007 |
|
RU2351979C2 |
| АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО | 2022 |
|
RU2802596C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2793150C1 |
| КОМПЛЕКС СРЕДСТВ УПРАВЛЕНИЯ И СВЯЗИ ДЛЯ АВТОМАТИЗИРОВАННОЙ ПЕРЕДВИЖНОЙ ЕДИНИЦЫ | 2023 |
|
RU2822692C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ КОМАНДНО-ШТАБНАЯ МАШИНА | 2022 |
|
RU2788156C1 |
| Мультифункциональный измерительный аппаратно-программный комплекс для обработки радиолокационной и оптической информации | 2022 |
|
RU2805988C1 |
| СОВМЕЩЕННАЯ СИСТЕМА РАДИОЛОКАЦИИ И СВЯЗИ НА РАДИОФОТОННЫХ ЭЛЕМЕНТАХ | 2018 |
|
RU2697389C1 |
Изобретение относится к цифровой вычислительной технике. Техническим результатом является возможность получения информации о воздушных объектах (ВО) от аналоговых радиолокационных станций (РЛС) и/или подвижных радиовысотомеров (ПРВ), осуществление регистрации, хранения и воспроизведения всех телефонных переговоров. Для этого комплекс, содержащий автоматизированные рабочие места (АРМ), станции электроснабжения, блок навигационный, периферийные устройства, радиостанции, вторичный источник питания (ВИП), аппаратуру передачи данных (АПД), дополнительно снабжают аппаратурой сопряжения первичной обработки и отображения (АСПО) аналоговой радиолокационной информации (РЛИ). В АСПО входят два блока сопряжения и преобразования (БСП), блок первичной обработки (БПО), блок совмещения видео и графической информации, АРМ обработки радиолокационной информации (АРМ-ОРЛИ). В состав АРМ-ОРЛИ входит одноплатная ПЭВМ, монитор и клавиатура. Каждое АРМ и АРМ-ОРЛИ дополнительно в своем составе содержат пульт связи, АПД, схему защиты линий. Также в комплекс введен модуль связи, содержащий коммутатор связи, концентратор ЛВС, ВИП. 5 з.п. ф-лы, 3 ил.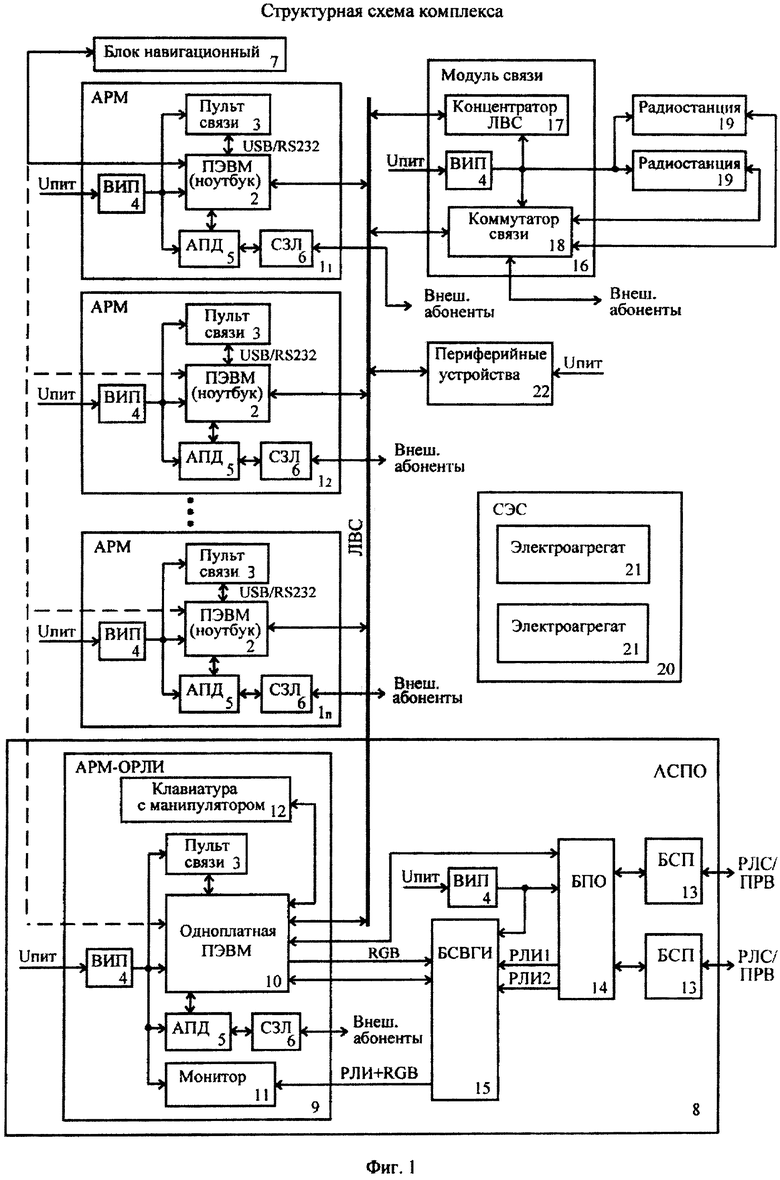
1. Комплекс технических средств автоматизации управления, содержащий автоматизированные рабочие места (АРМ), каждое из которых содержит ПЭВМ типа ноутбук, которые объединены локальной вычислительной сетью (ЛВС), станцию электроснабжения (СЭС), блок навигационный, выход которого подключен к ПЭВМ одного из АРМ, периферийные устройства, которые подключены к ЛВС, радиостанции, вторичный источник питания (ВИП), аппаратуру передачи данных (АПД), отличающийся тем, что дополнительно содержит аппаратуру сопряжения первичной обработки и отображения (АСПО) аналоговой радиолокационной информации, в которую входят два блока сопряжения и преобразования (БСП), блок первичной обработки (БПО), блок совмещения видео и графической информации (БСВГИ), АРМ обработки радиолокационной информации (АРМ-ОРЛИ), которое содержит в своем составе одноплатную ПЭВМ, монитор, клавиатуру с манипулятором, причем каждое АРМ и АРМ-ОРЛИ содержат пульт связи (ПС), второй вход-выход которого подключен по интерфейсу USB или RS232 ко второму входу соответствующей ПЭВМ, схему защиты линий (СЗЛ), первые входы всех ПЭВМ, ПС и АПД подключены к выходам соответствующих ВИП, второй вход-выход АПД подключен к третьему входу-выходу соответствующих ПЭВМ, четвертые входы-выходы которых подключены к ЛВС, третьи группы входов-выходов АПД подключены к выходам СЗЛ, входы которых являются входами-выходами комплекса для подключения внешних абонентов по каналам АПД, пятый вход-выход ПЭВМ АРМ-ОРЛИ подключен к клавиатуре с манипулятором, а шестой и седьмой - к первому и второму входам-выходам БСВГИ, третий выход которого подключен к второму входу монитора, первый вход которого подключен к выходу ВИП, четвертый и пятый входы БСВГИ подключены к первому и второму выходам БПО, а шестой вход к выходу ВИП, третий вход БПО подключен к выходу ВИП, четвертый вход-выход БПО подключен к восьмому входу-выходу ПЭВМ АРМ-ОРЛИ, а пятый и шестой входы-выходы БПО к первым входам-выходам первого и второго БСП, вторые группы входов-выходов которых являются входами-выходами АСПО для подключения к соответствующим входам-выходам аналоговых радиолокационных станций (РЛС) или подвижных радиовысотомеров (ПРВ), а также введен модуль связи, содержащий коммутатор связи, концентратор ЛВС, вторичный источник питания (ВИП), первые входы-выходы коммутатора связи и концентратора ЛВС подключены к ЛВС, а их вторые входы - к выходу ВИП, первые входы-выходы радиостанций подключены соответственно к третьему и четвертому входам-выходам коммутатора связи, а их вторые входы - к выходу ВИП.
2. Комплекс по п. 1, отличающийся тем, что все АРМ размещены в ударопрочных пластиковых кейсах.
3. Комплекс по п. 1, отличающийся тем, что ВИП входит в состав каждого АРМ и АРМ-ОРЛИ.
4. Комплекс по п. 1, отличающийся тем, что электропитание всех его составных частей, кроме периферийных устройств, осуществлено как напряжением ~220 В, 50 Гц, так и постоянным напряжением 9-36 В.
5. Комплекс по п. 1, отличающийся тем, что БСП подключены к БПО с помощью волоконно-оптических линий связи (ВОЛС).
6. Комплекс по п. 1, отличающийся тем, что количество АРМ в его составе может изменяться от одного до n+1, при этом все функциональные возможности комплекса сохраняются.
| Способ подавления шума в слуховом органе | 1949 |
|
SU133631A1 |
| RU 41889 U1, 10.11.2004 | |||
| Способ и приспособление для прочистки фурм конвертеров | 1936 |
|
SU51764A1 |
| US 7302269 B1, 27.11.2007. | |||

