2420-534774RU/041
СИСТЕМА БЕСПРОВОДНОЙ ПОДАЧИ ЭНЕРГИИ И УСТРОЙСТВО ПЕРЕДАЧИ ЭНЕРГИИ
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к системе беспроводной подачи энергии и к устройству передачи энергии для беспроводной подачи энергии в транспортное средство, оснащенное аккумулятором, такое как электромобиль.
Уровень техники
[0002] К настоящему времени известна беспроводная зарядная система, раскрытая в патентном документе 1, которая выполнена с возможностью заряжать аккумулятор, предоставленный для транспортного средства, посредством беспроводной подачи энергии в транспортное средство. Этот патентный документ 1 раскрывает то, что в случае, если присутствует множество устройств передачи энергии, катушка для передачи энергии слабо возбуждается так, что формируется случайный сигнал, который обнаруживается посредством транспортного средства, и транспортное средство и устройство передачи энергии спариваются между собой, если подтверждается то, что случайные сигналы совпадают между транспортным средством и устройством передачи энергии.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Международная публикация № WO2012/042902
Сущность изобретения
Техническая задача
[0004] Тем не менее, в конфигурации в традиционном примере, раскрытом в вышеуказанном патентном документе 1, для того чтобы выполнять спаривание, транспортное средство въезжает и останавливается в месте для парковки, и в этом состоянии сигнал, содержащий случайный идентификационный шаблон, передается посредством катушки для передачи энергии и принимается посредством транспортного средства. По этой причине, возникает такая проблема, что требуется длительное время до того, как транспортное средстве начинает фактически заряжаться, после остановки в месте для парковки.
Настоящее изобретение осуществлено для того, чтобы разрешать эту проблему в современном уровне техники, и его цель заключается в том, чтобы предоставлять систему беспроводной подачи энергии и устройство передачи энергии, допускающие быстрое спаривание с транспортным средством, въезжающим в место для парковки.
Решение задачи
[0005] В системе беспроводной подачи энергии согласно одному аспекту настоящего изобретения, устройство передачи энергии включает в себя датчик обнаружения приближения, выполненный с возможностью обнаруживать, когда транспортное средство приближается к месту для парковки, модуль управления подачей энергии, выполненный с возможностью управлять энергией, которая должна подаваться в катушку для передачи энергии, и модуль связи на стороне передачи энергии, выполненный с возможностью обмениваться данными с устройством приема энергии. Кроме того, устройство приема энергии включает в себя модуль управления приемом энергии, выполненный с возможностью управлять приемом энергии в катушке для приема энергии, и модуль связи на стороне приема энергии, выполненный с возможностью обмениваться данными с устройством передачи энергии. Когда транспортное средство приближается к месту для парковки, модуль управления подачей энергии задает первый режим возбуждения для катушки для передачи энергии, при котором катушка для передачи энергии возбуждается в шаблоне возбуждения, содержащем идентификационные данные, и когда первый режим возбуждения задается для катушки для передачи энергии, модуль управления приемом энергии получает идентификационные данные из шаблона возбуждения, принимаемого посредством катушки для приема энергии, и передает идентификационные данные в устройство передачи энергии. Дополнительно, модуль управления подачей энергии определяет то, совпадают или нет между собой идентификационные данные, содержащиеся в шаблоне возбуждения, при задании первого режима возбуждения для катушки для передачи энергии, и идентификационные данные, полученные из шаблона возбуждения, принимаемого посредством катушки для приема энергии, и если фрагменты идентификационных данных совпадают между собой, модуль управления подачей энергии задает второй режим возбуждения для катушки для передачи энергии для определения того, присутствует или нет транспортное средство в позиции выполнения процесса заряда в месте для парковки.
[0006] Устройство передачи энергии согласно одному аспекту настоящего изобретения включает в себя: датчик обнаружения приближения, выполненный с возможностью обнаруживать, когда транспортное средство приближается к месту для парковки; модуль управления подачей энергии, выполненный с возможностью управлять током, который должен подаваться в катушку для передачи энергии; и модуль связи, выполненный с возможностью обмениваться данными с транспортным средством. Когда транспортное средство приближается к месту для парковки, модуль управления подачей энергии задает первый режим возбуждения для катушки для передачи энергии, при котором катушка для передачи энергии возбуждается в шаблоне возбуждения, содержащем идентификационные данные. Когда модуль связи принимает идентификационные данные, передаваемые из транспортного средства, модуль управления подачей энергии определяет то, совпадают или нет между собой принятые идентификационные данные и идентификационные данные, содержащиеся в шаблоне возбуждения, при задании первого режима возбуждения для катушки для передачи энергии. Если фрагменты идентификационных данных совпадают между собой, модуль управления подачей энергии задает второй режим возбуждения для катушки для передачи энергии для определения того, присутствует или нет транспортное средство в позиции выполнения процесса заряда в месте для парковки.
Краткое описание чертежей
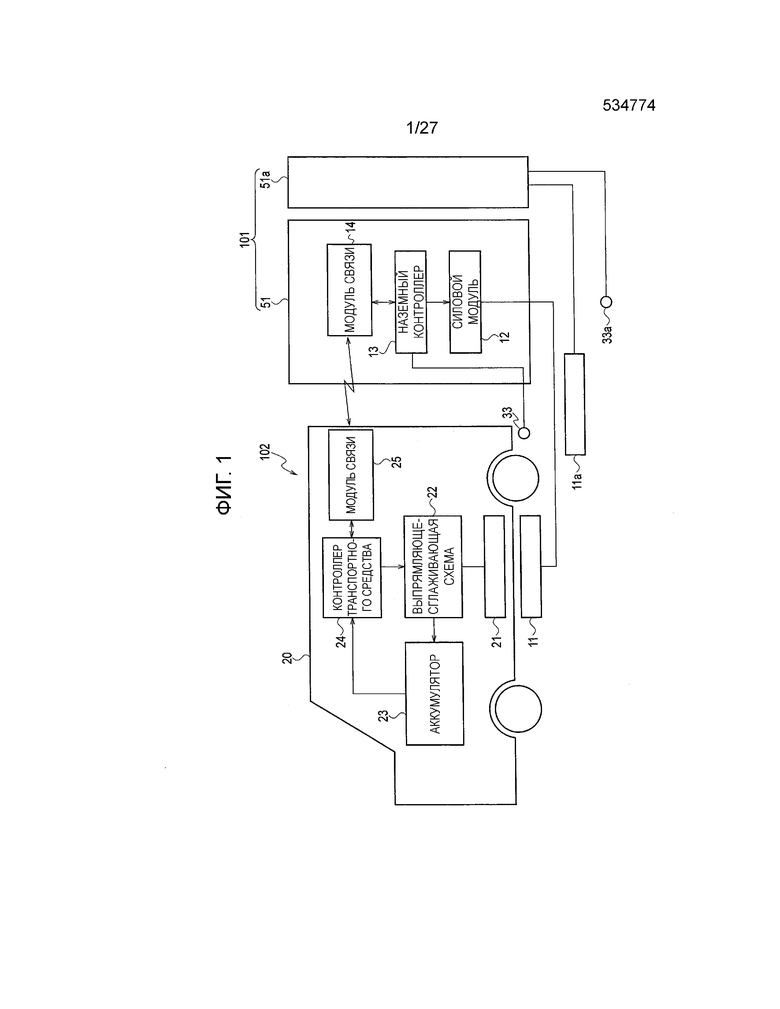
[0007] Фиг. 1 является блок-схемой, показывающей конфигурацию системы беспроводной подачи энергии согласно варианту осуществления настоящего изобретения.
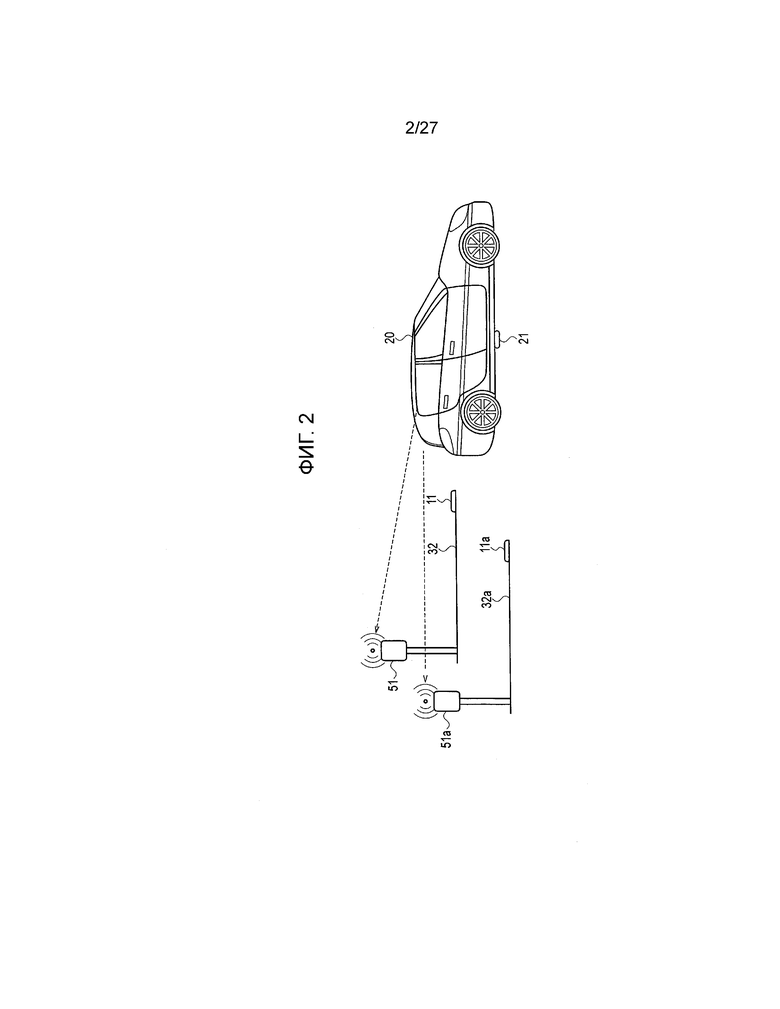
Фиг. 2 является пояснительной схемой, показывающей взаимосвязь между транспортным средством и множеством мест для парковки.
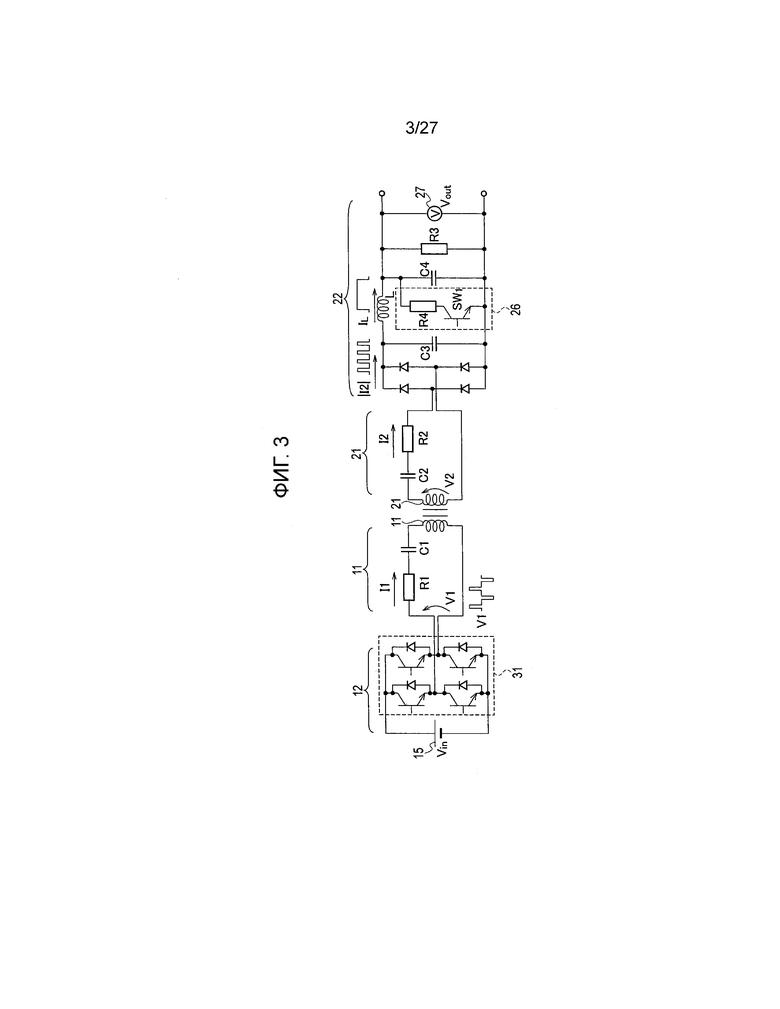
Фиг. 3 является принципиальной схемой силового модуля, катушки для передачи энергии, катушки для приема энергии и выпрямляюще-сглаживающей схемы системы беспроводной подачи энергии согласно первому варианту осуществления настоящего изобретения.
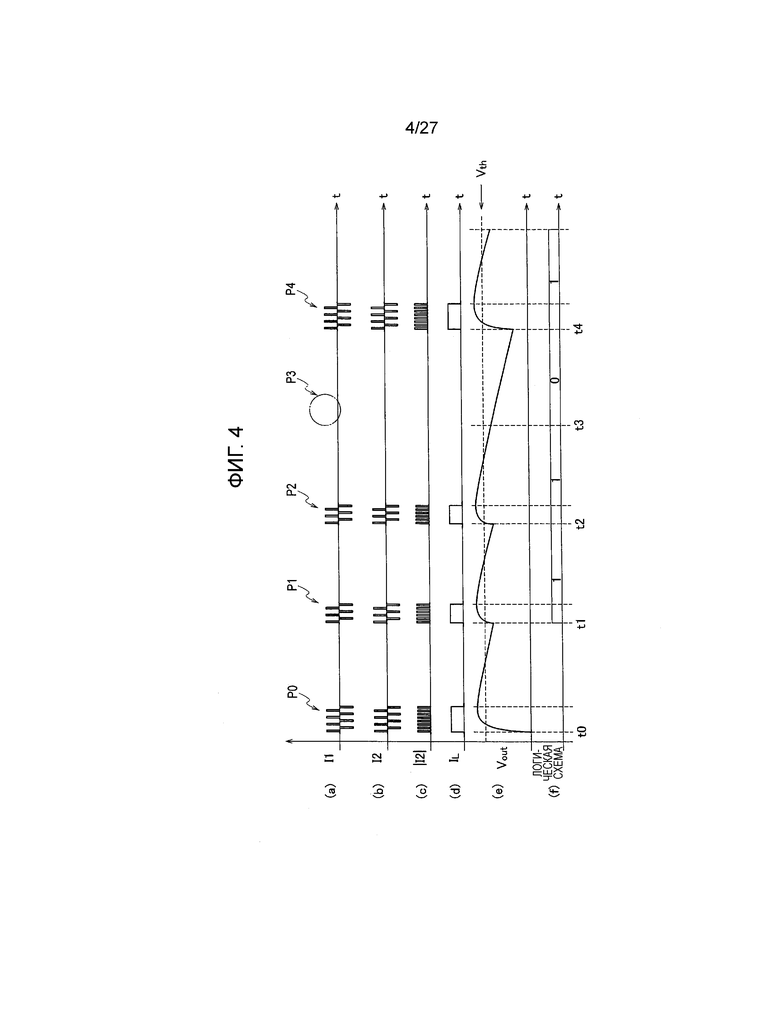
Фиг. 4 является временной диаграммой, показывающей формы сигналов в системе беспроводной подачи энергии согласно первому варианту осуществления настоящего изобретения, и части (a)-(f) показывают ток I1, ток I2, абсолютное значение тока I2, ток IL, выходное напряжение Vout и логические схемы, соответственно.
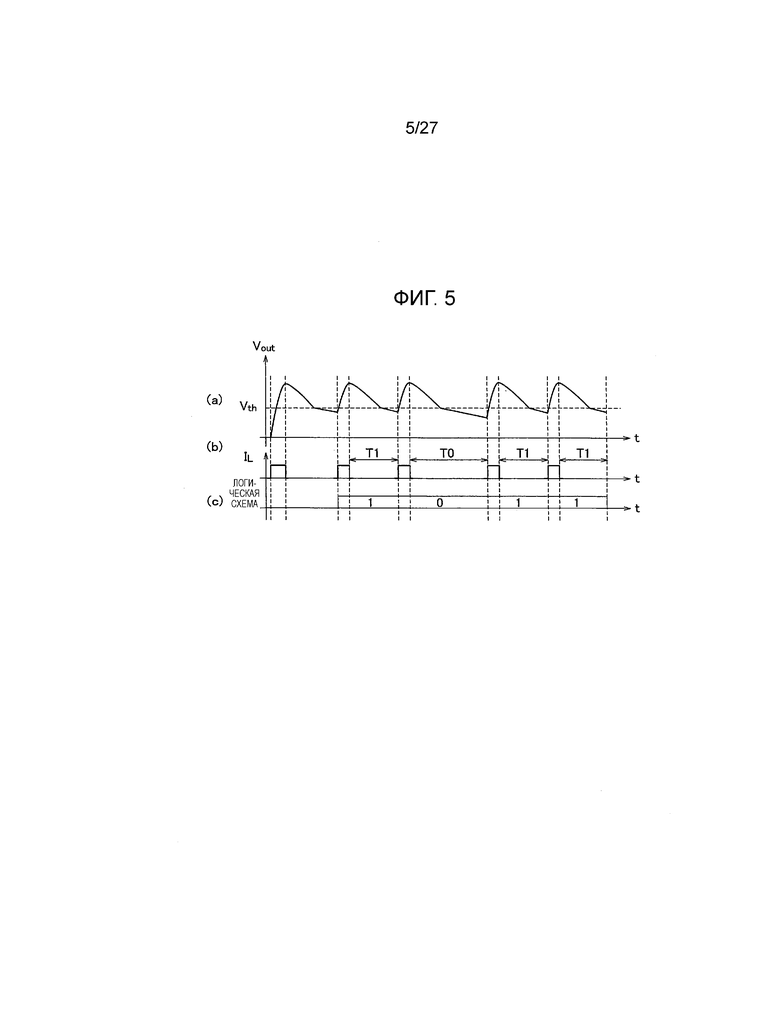
Фиг. 5 является временной диаграммой, показывающей формы сигналов в системе беспроводной подачи энергии согласно второму варианту осуществления настоящего изобретения, и части (a)-(c) показывают выходное напряжение Vout, ток IL и логические схемы, соответственно.
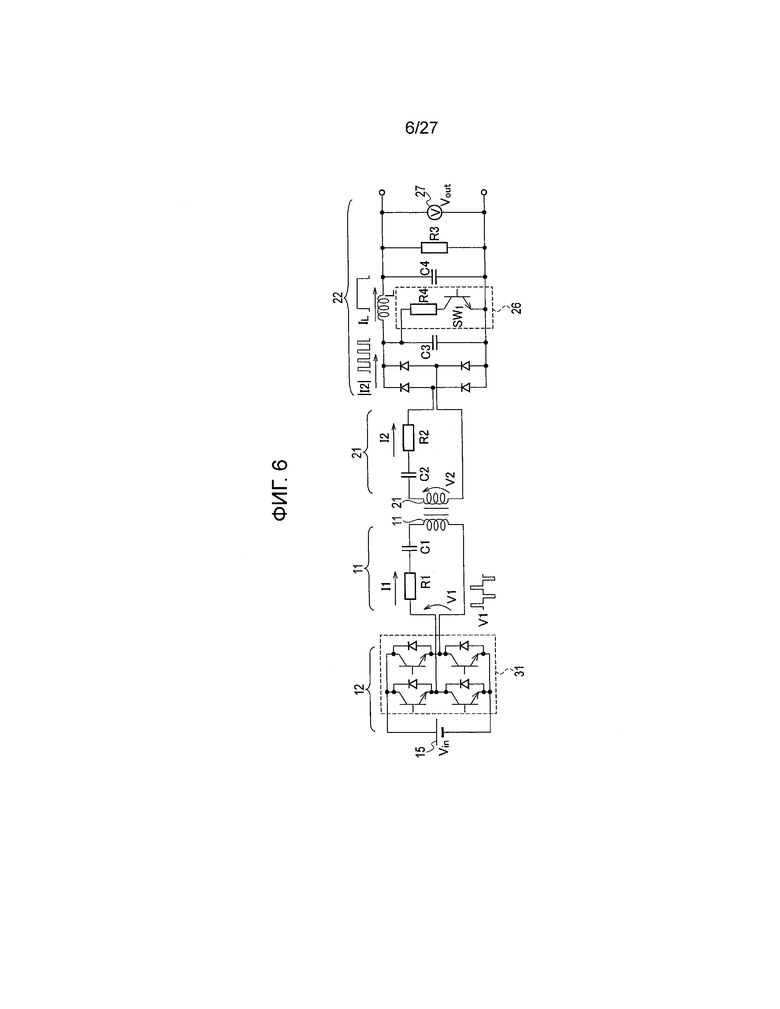
Фиг. 6 является принципиальной схемой силового модуля, катушки для передачи энергии, катушки для приема энергии и выпрямляюще-сглаживающей схемы системы беспроводной подачи энергии согласно третьему варианту осуществления настоящего изобретения.
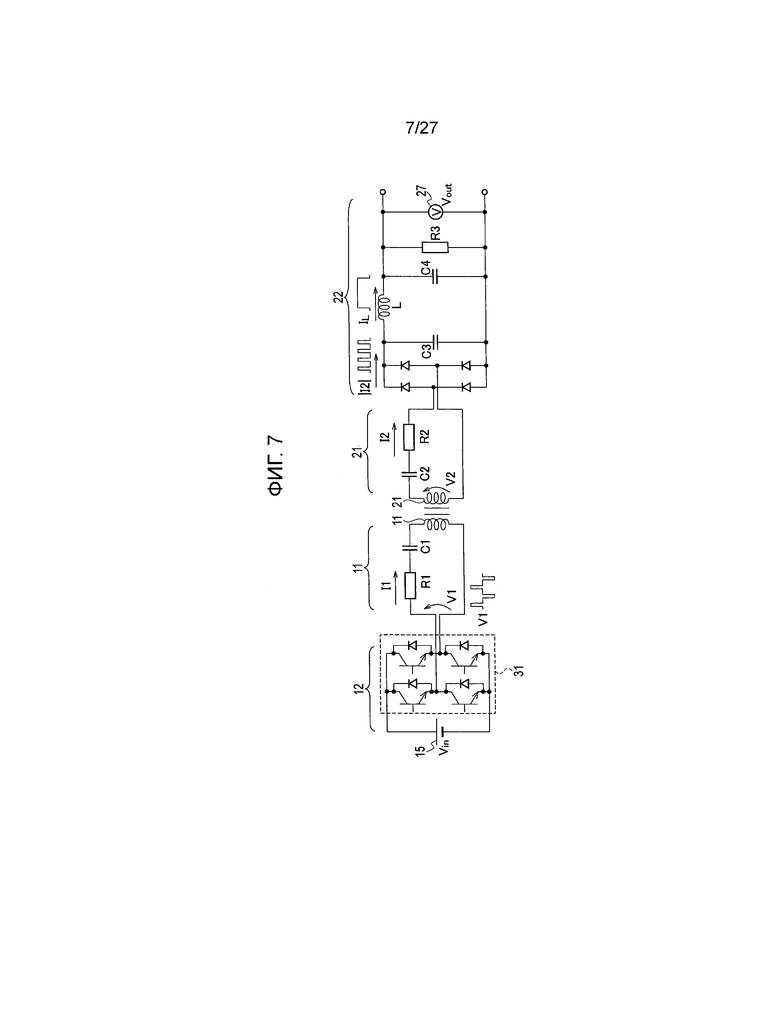
Фиг. 7 является принципиальной схемой силового модуля, катушки для передачи энергии, катушки для приема энергии и выпрямляюще-сглаживающей схемы системы беспроводной подачи энергии согласно четвертому варианту осуществления настоящего изобретения.
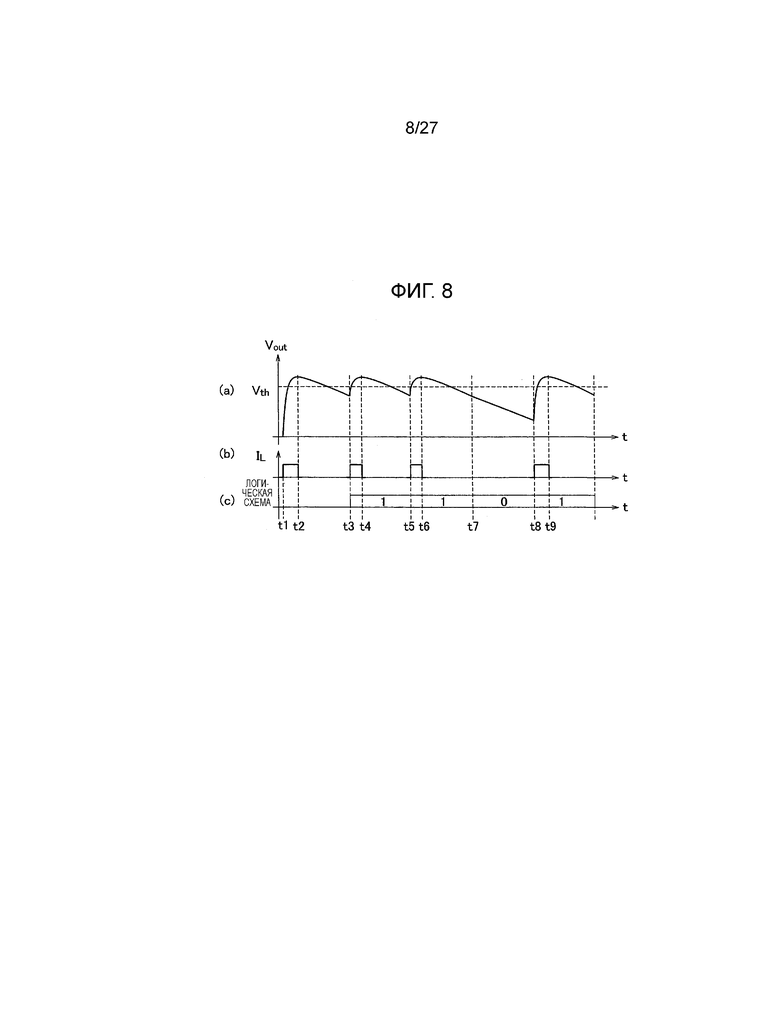
Фиг. 8 является временной диаграммой, показывающей формы сигналов в системе беспроводной подачи энергии согласно четвертому варианту осуществления настоящего изобретения, и части (a)-(c) показывают выходное напряжение Vout, ток IL и логические схемы, соответственно.
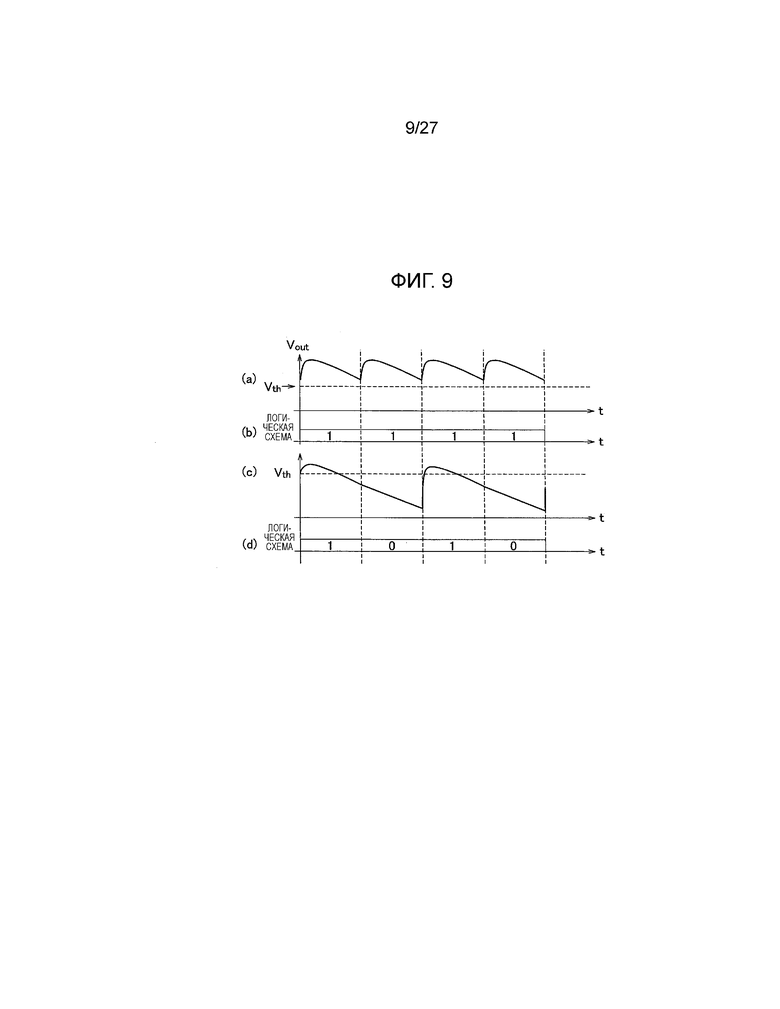
Фиг. 9 является временной диаграммой, показывающей формы сигналов некоторых сигналов в системе беспроводной подачи энергии согласно четвертому варианту осуществления настоящего изобретения, и части (a) и (c) и части (b) и (d) показывают выходное напряжение Vout и логические схемы, соответственно.
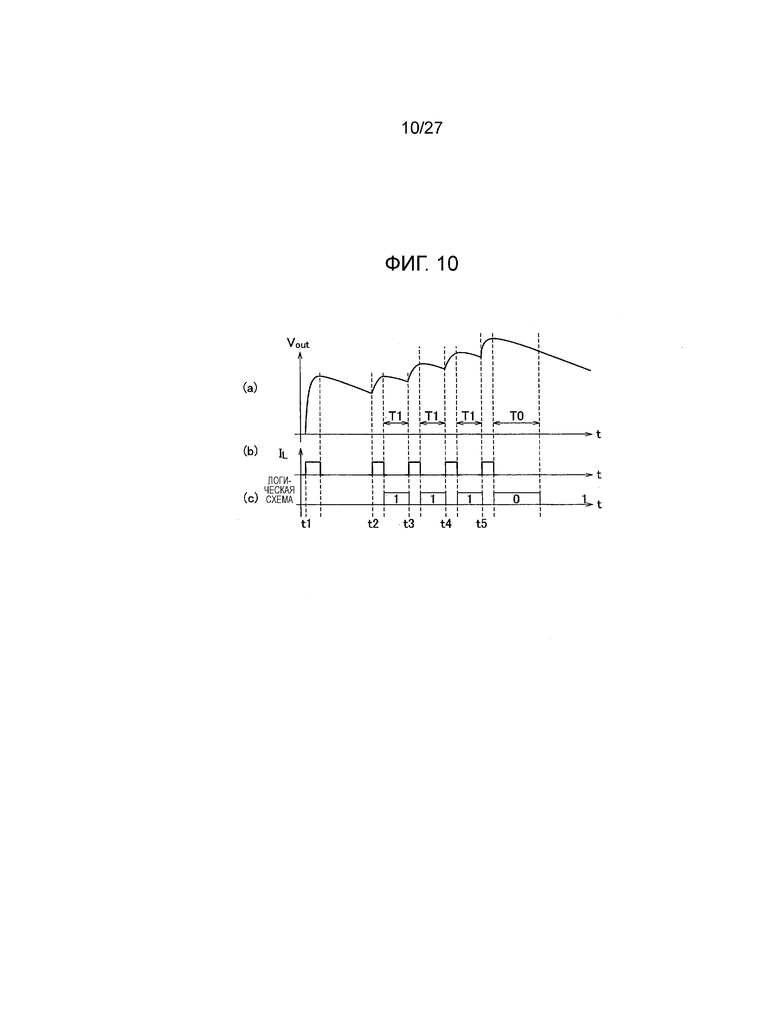
Фиг. 10 является временной диаграммой, показывающей формы сигналов в системе беспроводной подачи энергии согласно пятому варианту осуществления настоящего изобретения, и части (a)-(c) показывают выходное напряжение Vout, ток IL и логические схемы, соответственно.
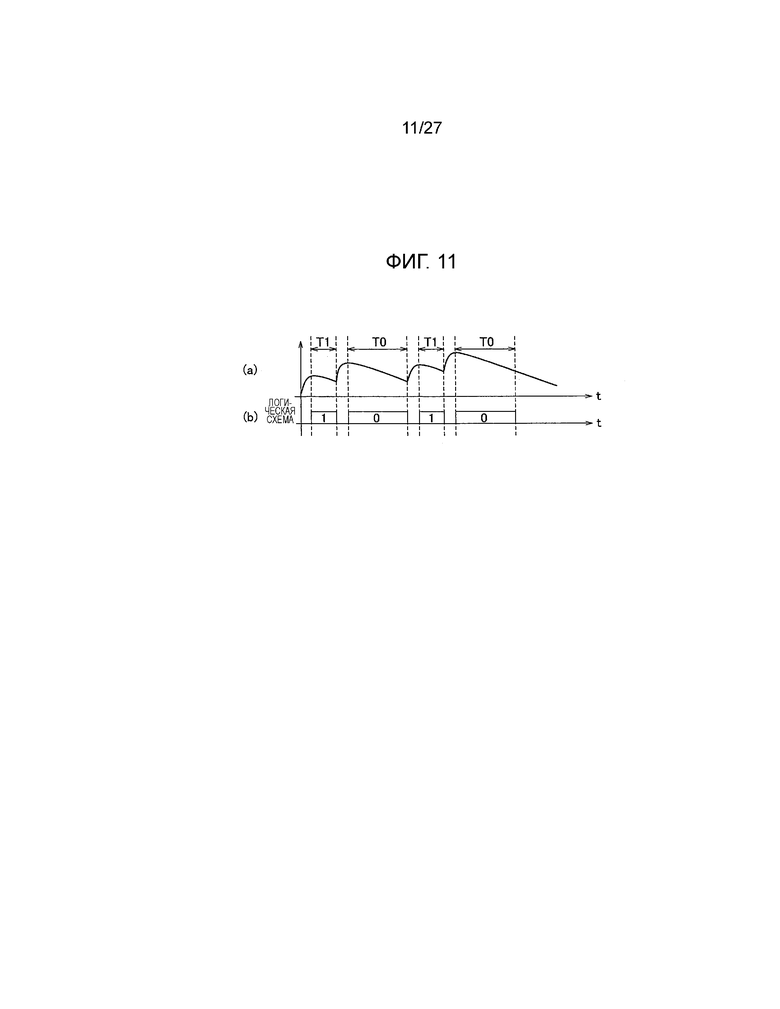
Фиг. 11 является временной диаграммой, показывающей формы сигналов некоторых сигналов в системе беспроводной подачи энергии согласно пятому варианту осуществления настоящего изобретения, и части (a) и (b) показывают выходное напряжение Vout и логические схемы, соответственно.
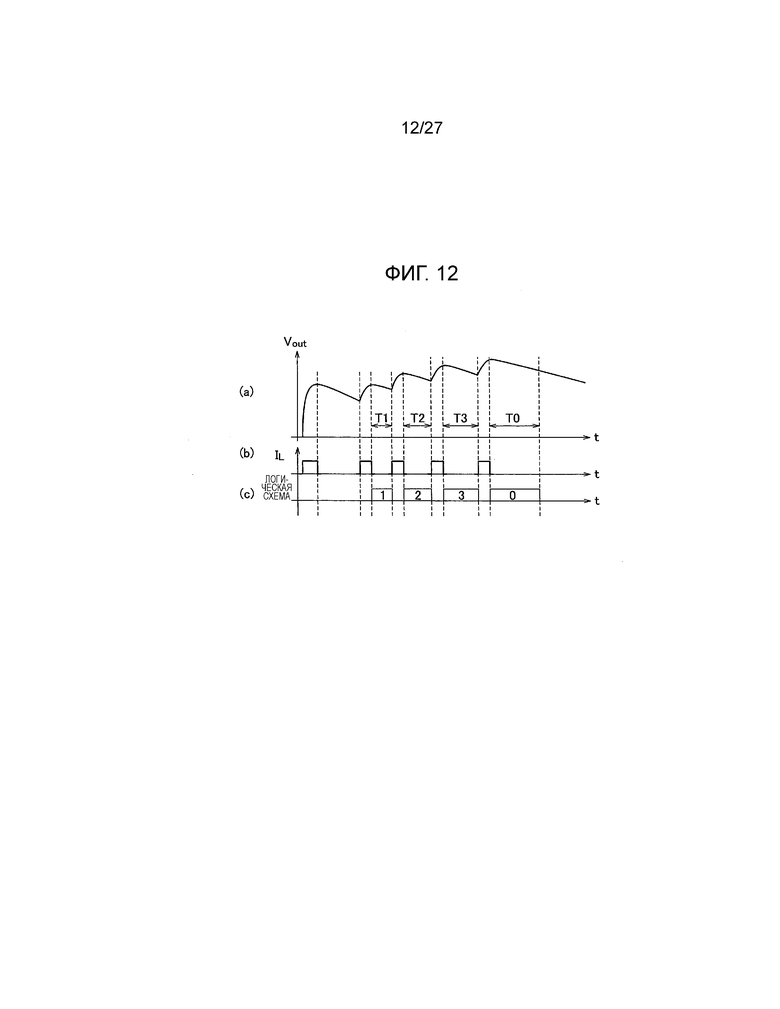
Фиг. 12 является временной диаграммой, показывающей формы сигналов в системе беспроводной подачи энергии согласно модификации пятого варианта осуществления настоящего изобретения, и части (a)-(c) показывают выходное напряжение Vout, ток IL и логические схемы, соответственно.
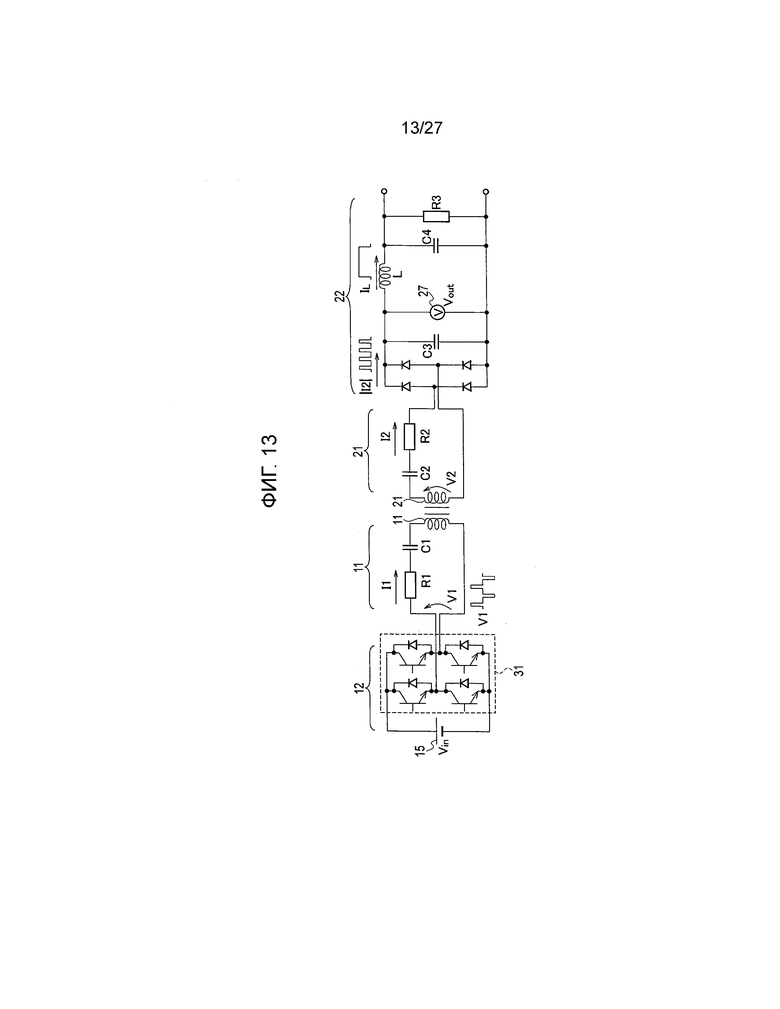
Фиг. 13 является принципиальной схемой силового модуля, катушки для передачи энергии, катушки для приема энергии и выпрямляюще-сглаживающей схемы системы беспроводной подачи энергии согласно шестому варианту осуществления настоящего изобретения.
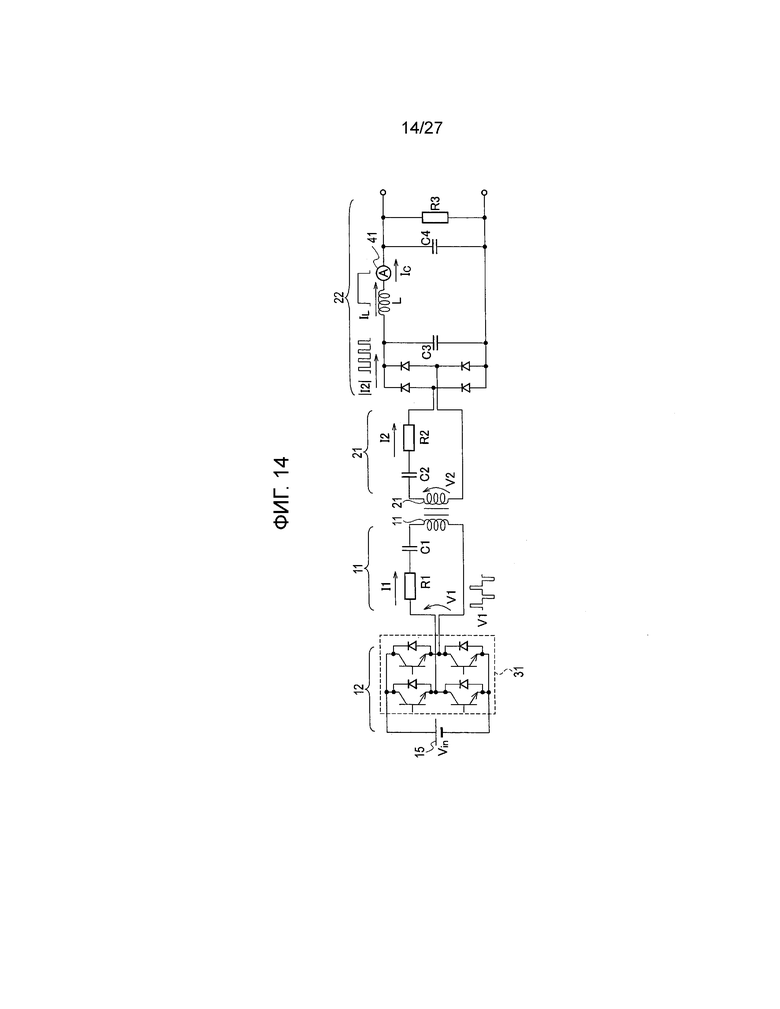
Фиг. 14 является принципиальной схемой силового модуля, катушки для передачи энергии, катушки для приема энергии и выпрямляюще-сглаживающей схемы системы беспроводной подачи энергии согласно седьмому варианту осуществления настоящего изобретения.
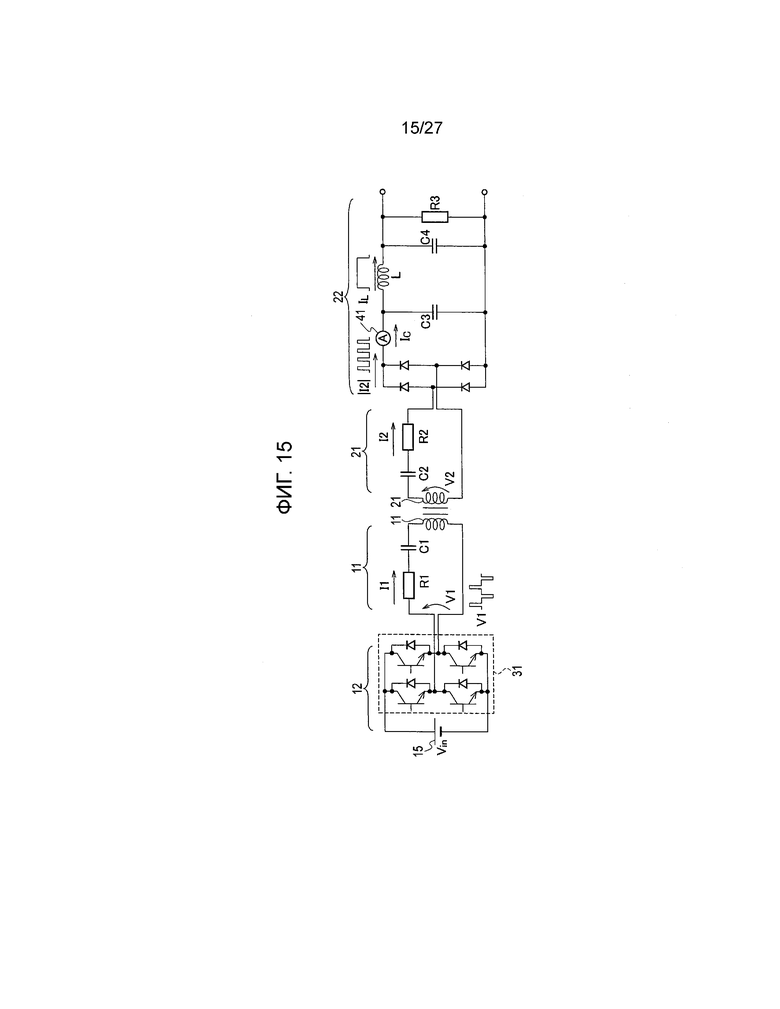
Фиг. 15 является принципиальной схемой силового модуля, катушки для передачи энергии, катушки для приема энергии и выпрямляюще-сглаживающей схемы системы беспроводной подачи энергии согласно восьмому варианту осуществления настоящего изобретения.
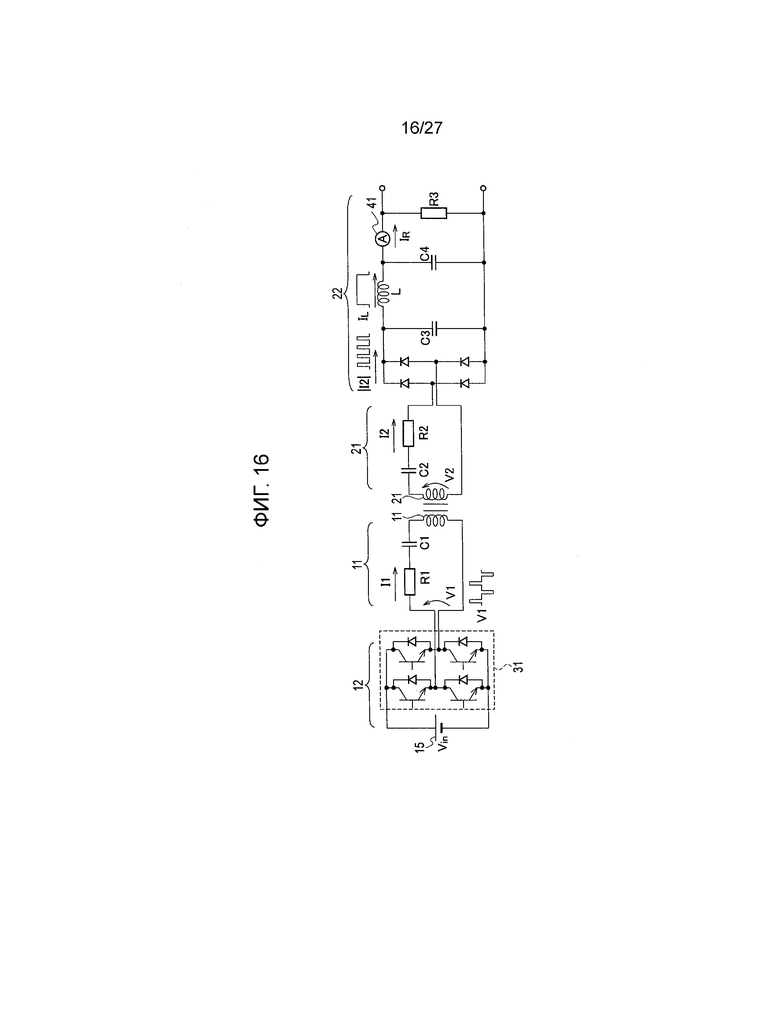
Фиг. 16 является принципиальной схемой силового модуля, катушки для передачи энергии, катушки для приема энергии и выпрямляюще-сглаживающей схемы системы беспроводной подачи энергии согласно девятому варианту осуществления настоящего изобретения.
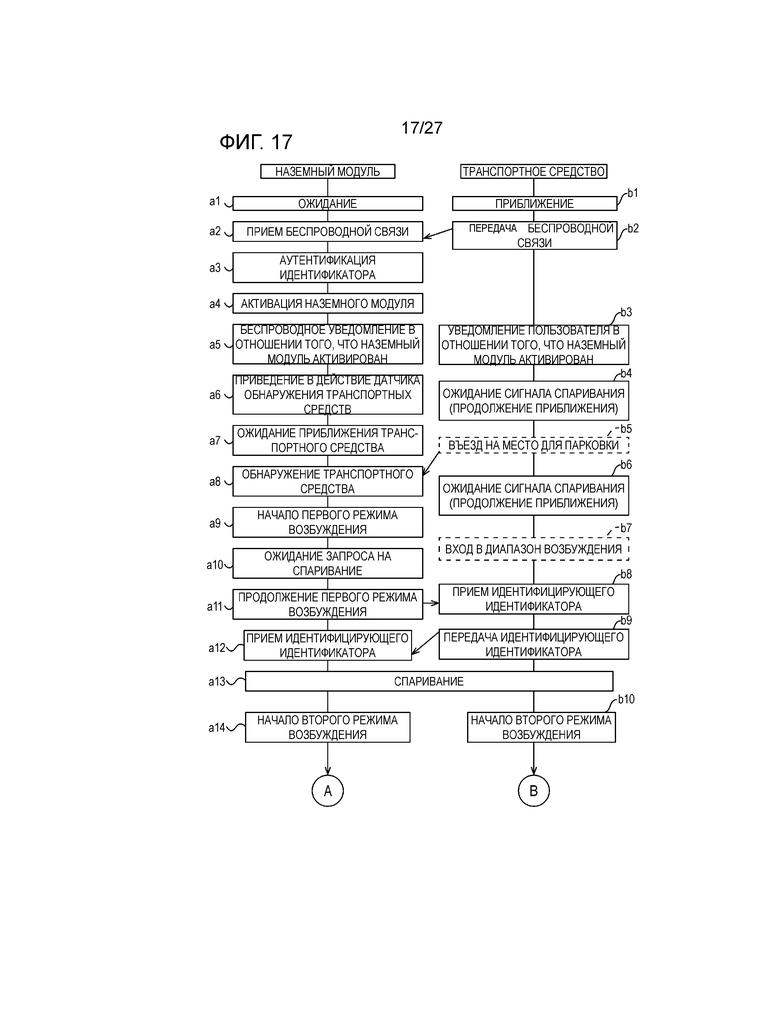
Фиг. 17 является схемой последовательности сигналов, показывающей процедуру обработки посредством наземного контроллера и контроллера транспортного средства.
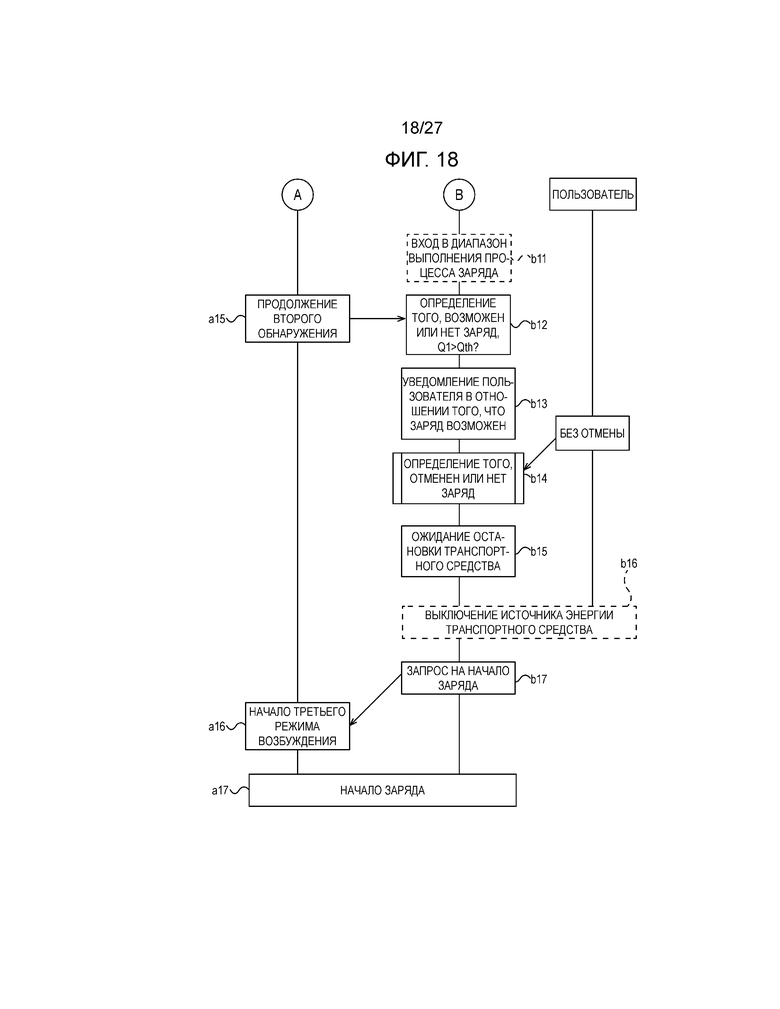
Фиг. 18 является схемой последовательности сигналов, показывающей процедуру обработки посредством наземного контроллера и контроллера транспортного средства.
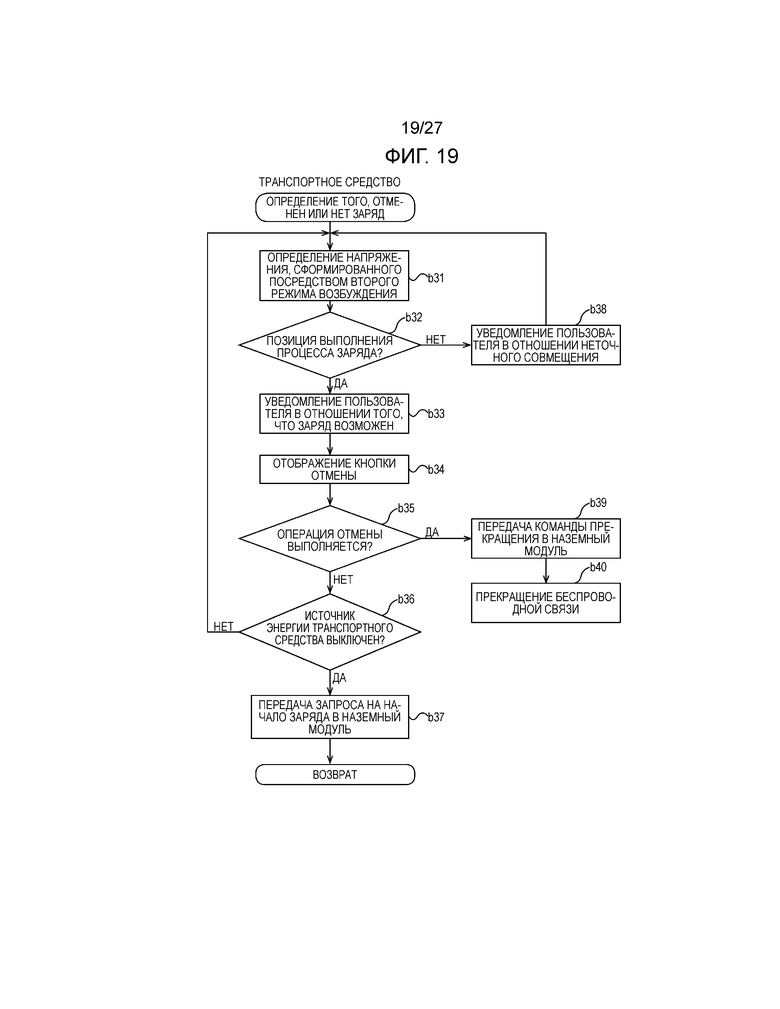
Фиг. 19 является блок-схемой последовательности операций способа, показывающей процедуру процесса определения отмены посредством контроллера транспортного средства.
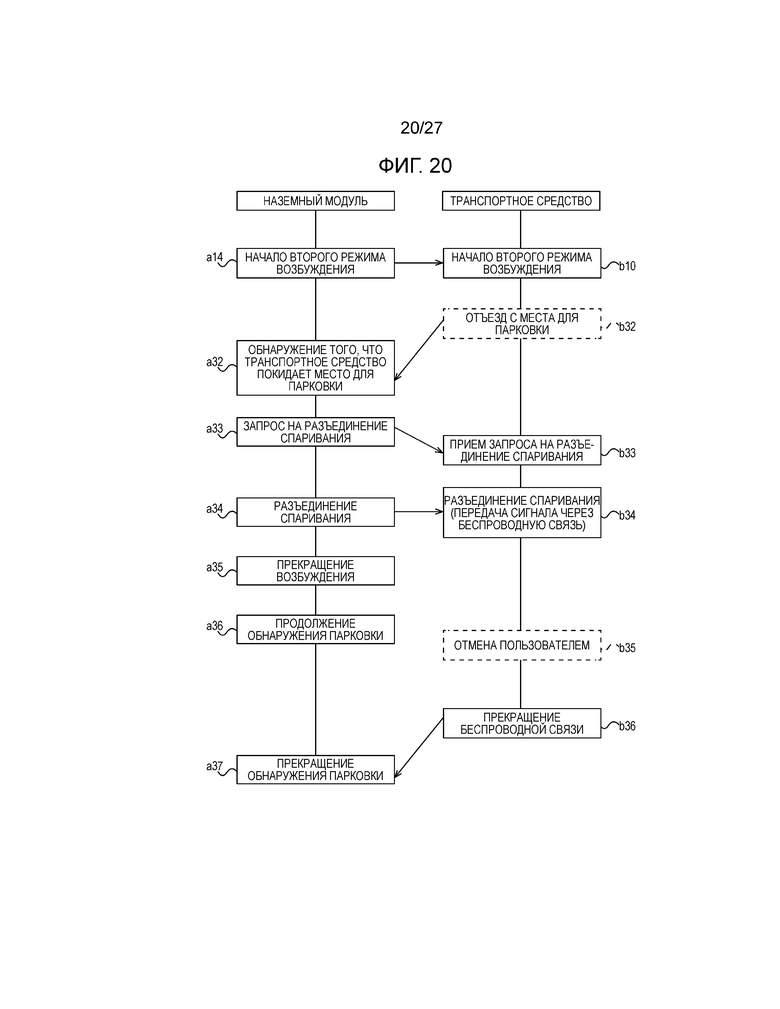
Фиг. 20 является схемой последовательности сигналов, показывающей процедуру обработки, выполняемой посредством наземного контроллера и контроллера транспортного средства, когда транспортное средство покидает место для парковки.
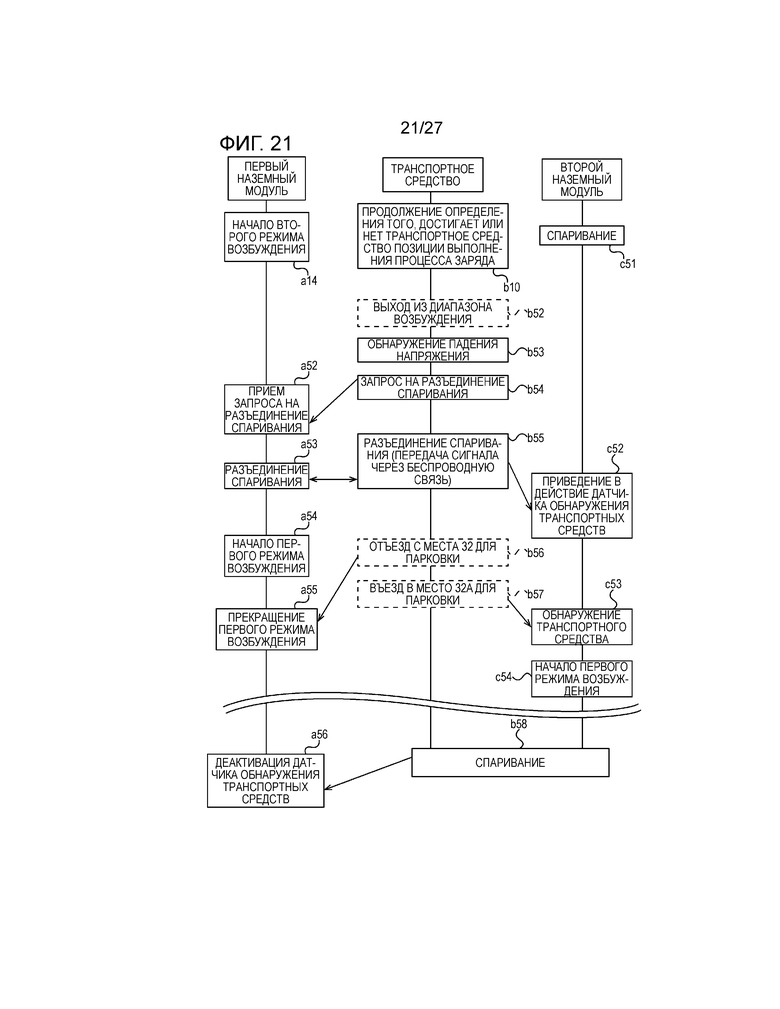
Фиг. 21 является схемой последовательности сигналов, показывающей процедуру обработки, выполняемой посредством наземного контроллера и контроллера транспортного средства, когда транспортное средство изменяет свое место для парковки.
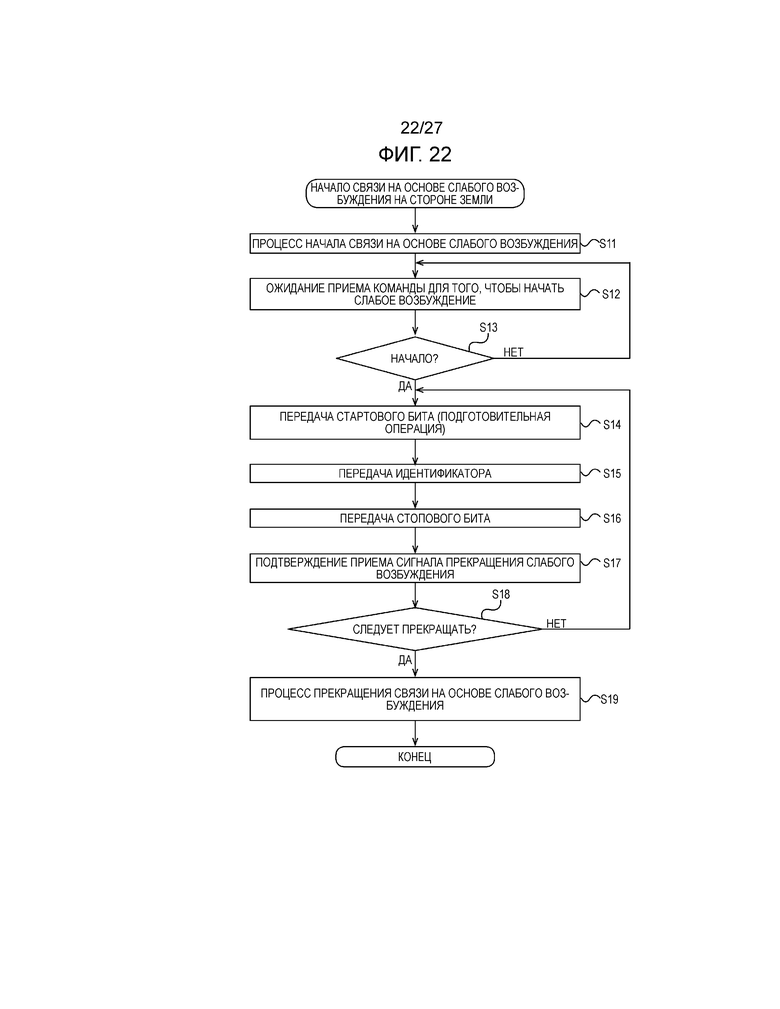
Фиг. 22 является блок-схемой последовательности операций способа, показывающей обработку, выполняемую посредством наземного контроллера для того, чтобы передавать идентифицирующий идентификатор, сформированный посредством первого режима возбуждения.
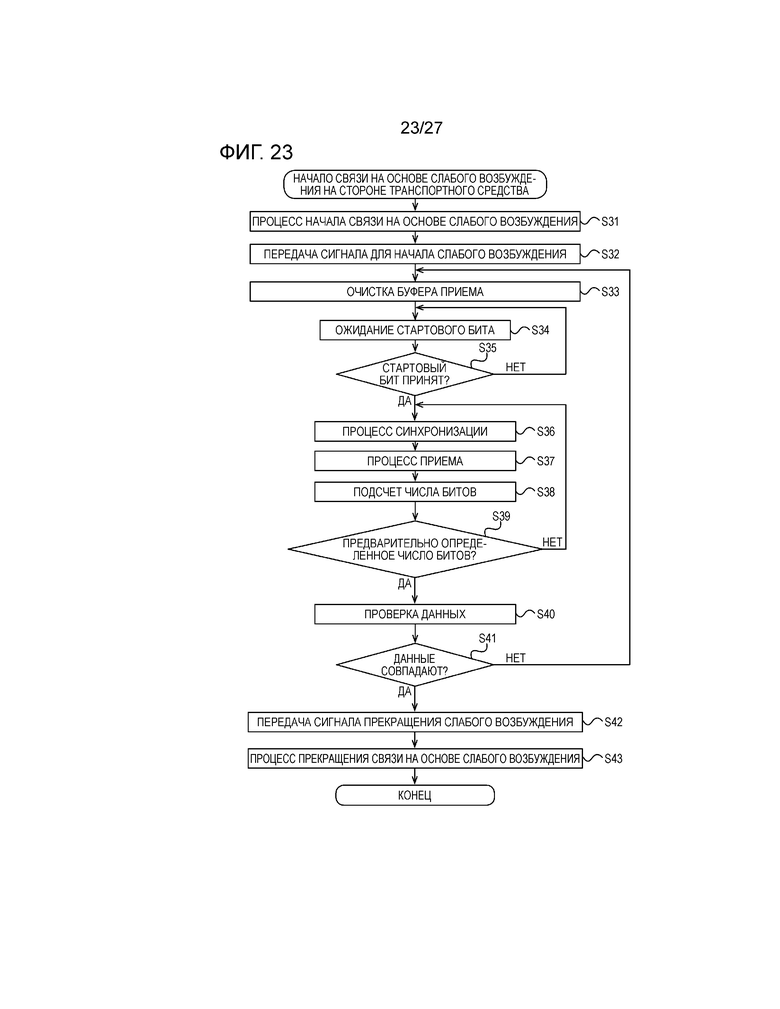
Фиг. 23 является блок-схемой последовательности операций способа, показывающей обработку, выполняемую посредством контроллера транспортного средства для того, чтобы принимать идентифицирующий идентификатор, сформированный посредством первого режима возбуждения.
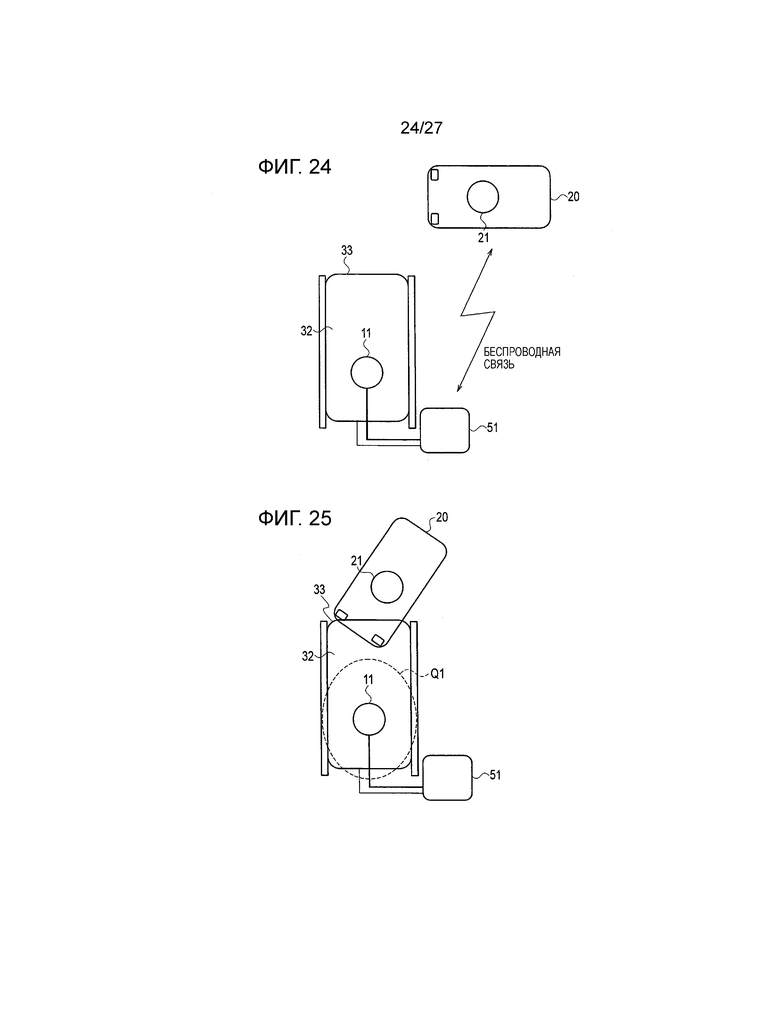
Фиг. 24 является пояснительной схемой, показывающей то, что транспортное средство приближается к месту для парковки.
Фиг. 25 является пояснительной схемой, показывающей то, что часть транспортного средства въезжает на место для парковки.
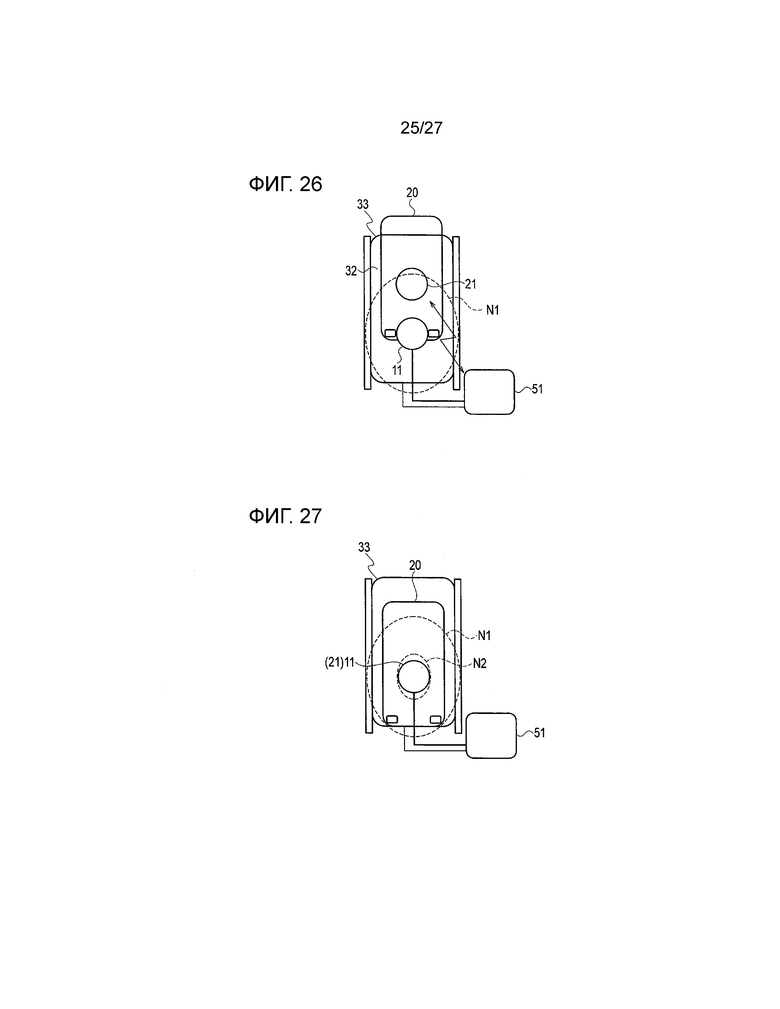
Фиг. 26 является пояснительной схемой, показывающей то, что транспортное средство въезжает на место для парковки, и его катушка для приема энергии достигает внутренней части диапазона возбуждения катушки для передачи энергии.
Фиг. 27 является пояснительной схемой, показывающей то, что транспортное средство въезжает на место для парковки, и его катушка для приема энергии достигает позиции выполнения процесса заряда.
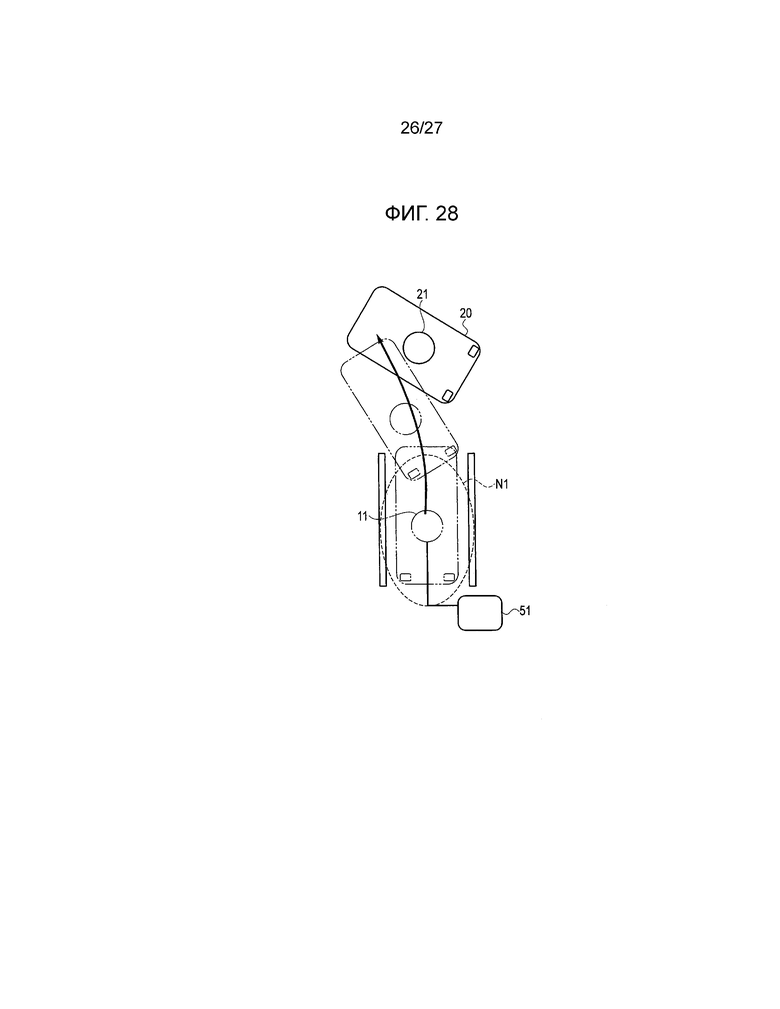
Фиг. 28 является пояснительной схемой, показывающей то, что транспортное средство въезжает на место для парковки, но затем покидает место для парковки.
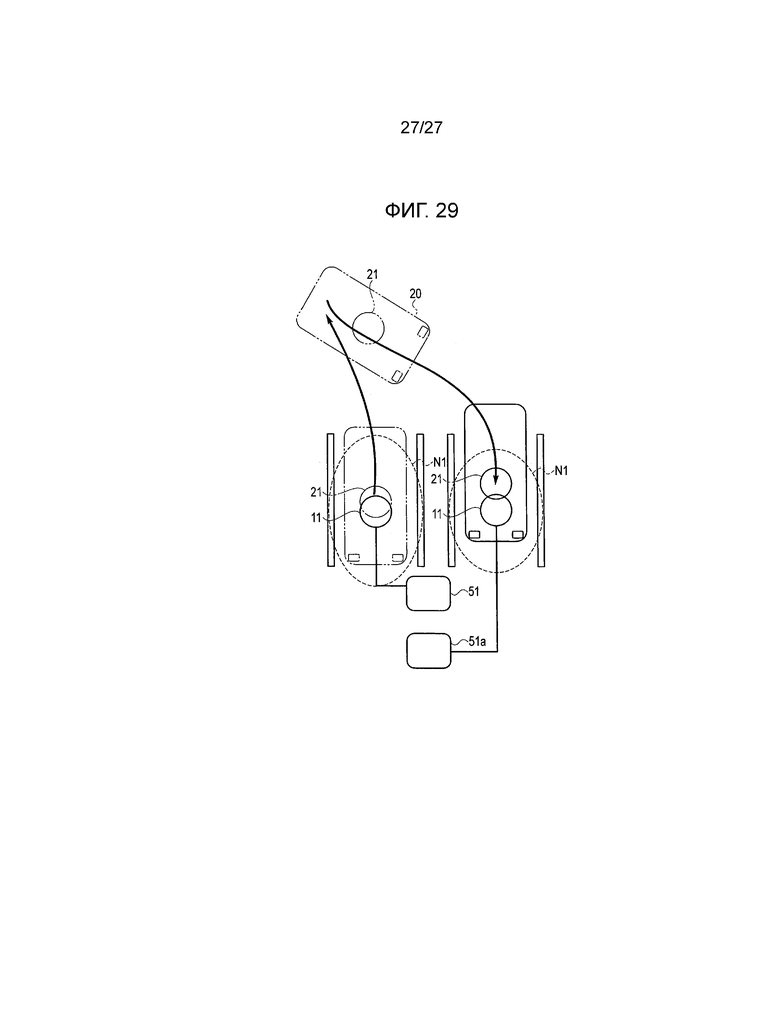
Фиг. 29 является пояснительной схемой, показывающей то, что транспортное средство изменяет свое место для парковки.
Подробное описание вариантов осуществления
[0008] Ниже описываются варианты осуществления настоящего изобретения со ссылкой на чертежи.
Описание первого варианта осуществления
Фиг. 1 является блок-схемой, показывающей конфигурацию системы беспроводной подачи энергии согласно варианту осуществления настоящего изобретения. Как показано на фиг. 1, эта система беспроводной подачи энергии включает в себя устройство 101 передачи энергии, предоставленное для парковки оборудования на земле, и устройство 102 приема энергии, смонтированное на транспортном средстве 20.
[0009] Устройство 101 передачи энергии включает в себя множество мест для парковки, каждое из которых служит для заряда аккумулятора, смонтированного на транспортном средстве 20, и включает в себя наземный модуль 51 для каждого места для парковки. Следует отметить, что фиг. 1 показывает два наземных модуля 51, 51a в качестве примера. Настоящее изобретение не ограничено этой конфигурацией и является применимым к случаям, в которых устройство 101 передачи энергии включает в себя три или более наземных модулей.
[0010] Наземный модуль 51 включает в себя: катушку 11 для передачи энергии, установленную на земле в месте для парковки; силовой модуль 12, выполненный с возможностью возбуждать катушку 11 для передачи энергии посредством обеспечения принудительного протекания тока через нее; наземный контроллер 13 (модуль управления подачей энергии), выполненный с возможностью управлять приведением в действие силового модуля 12; и модуль 14 связи (модуль связи на стороне передачи энергии), выполненный с возможностью осуществлять беспроводную связь с устройством 102 приема энергии. С наземным контроллером 13 соединяется датчик 33 обнаружения транспортных средств (датчик обнаружения приближения), который выполнен с возможностью обнаруживать, когда транспортное средство 20 приближается к месту для парковки. Между тем, наземный модуль 51a также имеет аналогичную конфигурацию, и катушка 11a для передачи энергии и датчик 33a обнаружения транспортных средств соединяются с ним. Следует отметить, что наземные модули 51, 51a могут состоять, например, из интегрированного компьютера, включающего в себя центральный процессор (CPU) и средство хранения, такое как RAM, ROM и жесткий диск.
[0011] Устройство 102 приема энергии, которое монтируется на транспортном средстве 20, включает в себя катушку 21 для приема энергии, установленную в надлежащей позиции в днище транспортного средства 20, и выпрямляюще-сглаживающую схему 22, выполненную с возможностью выпрямлять и сглаживать переменный ток, принимаемый посредством катушки 21 для приема энергии. Устройство 102 приема энергии дополнительно включает в себя контроллер 24 транспортного средства (модуль управления приемом энергии), выполненный с возможностью управлять приведением в действие выпрямляюще-сглаживающей схемы 22, аккумулятор 23, выполненный с возможностью заряжаться энергией, принимаемой посредством катушки 21 для приема энергии, и модуль 25 связи (модуль связи на стороне приема энергии), выполненный с возможностью обмениваться данными с наземным модулем 51. Катушка 21 для приема энергии располагается в такой позиции, что она совпадает с вышеуказанной катушкой 11 для передачи энергии, когда транспортное средство 20 припарковано в предварительно определенной позиции в месте для парковки. Следует отметить, что устройство 102 приема энергии может состоять, например, из интегрированного компьютера, включающего в себя центральный процессор (CPU) и модули хранения, такие как RAM, ROM и жесткий диск.
[0012] Фиг. 2 является пояснительной схемой, показывающей взаимосвязь между транспортным средством 20 и множеством мест 32, 32a для парковки. В этом варианте осуществления, процесс спаривания транспортного средства 20 и места 32 для парковки, в котором должно парковаться транспортное средство 20, выполняется через беспроводную связь между наземными модулями 51, 51a, предоставленными в местах 32, 32a для парковки, и устройством 102 приема энергии, смонтированным на транспортном средстве 20. Затем катушка 11 для передачи энергии в месте 32 для парковки, спаренном с транспортным средством 20, запитывается и возбуждается, за счет этого подавая в беспроводном режиме питание в устройство 102 приема энергии. Как результат, аккумулятор 23, смонтированный на транспортном средстве 20, заряжается.
[0013] Фиг. 3 является принципиальной схемой, показывающей подробные конфигурации силового модуля 12, катушки 11 для передачи энергии, катушки 21 для приема энергии и выпрямляюще-сглаживающей схемы 22, показанной на фиг. 1, и их периферийных элементов. Как показано на фиг. 3, силовой модуль 12 включает в себя схему 31 инвертора, сформированную из множества схем переключателя (к примеру, в качестве MOSFET-транзисторов). Включение и выключение каждой схемы переключателя регулируется под управлением наземного контроллера 13 (см. фиг. 1), так что постоянное напряжение Vin, поданное из источника 15 энергии постоянного тока, преобразуется в переменное напряжение предварительно определенной частоты.
[0014] Резистор R1 и конденсатор C1 соединяются с катушкой 11 для передачи энергии. Посредством приложения переменного напряжения, выведенного из силового модуля 12, к катушке 11 для передачи энергии и за счет этого обеспечения принудительного протекания тока через нее, катушка 11 для передачи энергии может задаваться как одно из первого режима возбуждения и второго режима возбуждения, которые описываются ниже. Дополнительно, когда катушка 11 для передачи энергии и катушка 21 для приема энергии позиционируются таким образом, что они совпадают между собой (когда катушки 11, 21 позиционируются как обращенные друг к другу, как показано на фиг. 1), третий режим возбуждения задается для катушки 11 для передачи энергии, при котором ток для заряда аккумулятора подается в катушку 11 для передачи энергии, чтобы за счет этого передавать в беспроводном режиме энергию в катушку 21 для приема энергии.
[0015] Конденсатор C2 и резистор R2 соединяются с катушкой 21 для приема энергии, и катушка 21 для приема энергии в беспроводном режиме принимает энергию, передаваемую из катушки 11 для передачи энергии. Выпрямляюще-сглаживающая схема 22 включает в себя мостовую схему, сформированную из множества диодов, а также конденсаторов C3, C4, катушки L и разрядного резистора R3. Выпрямляюще-сглаживающая схема 22 преобразует переменное напряжение, принимаемое посредством катушки 21 для приема энергии, в постоянное напряжение и дополнительно сглаживает его, а затем подает его в аккумулятор 23 (см. фиг. 1). Выпрямляюще-сглаживающая схема 22 дополнительно включает в себя разрядную схему 26, сформированную из резистора R4 и переключателя SW1. Датчик 27 напряжения, выполненный с возможностью измерять выходное напряжение Vout, предоставляется на выходном контактном выводе выпрямляюще-сглаживающей схемы 22. Выходное напряжение Vout, измеряемое посредством датчика 27 напряжения, выводится в контроллер 24 транспортного средства (см. фиг. 1). Включение и выключение переключателя SW1 регулируется под управлением контроллера 24 транспортного средства. В частности, в то время как первый режим возбуждения задается для катушки 11 для передачи энергии, переключатель SW1 выключается, если выходное напряжение Vout равно или ниже предварительно установленного порогового напряжения Vth, и переключатель SW1 включается, чтобы разряжать напряжение, накопленное в конденсаторе C1, если выходное напряжение Vout превышает пороговое напряжение Vth.
[0016] Кроме того, в этом варианте осуществления, когда транспортное средство 20 приближается к месту 32 для парковки, первый режим возбуждения задается для катушки 11 для передачи энергии для того, чтобы выполнять спаривание между транспортным средством 20 и наземным модулем 51. Дополнительно, после того, как спаривание завершается, второй режим возбуждения задается для катушки 11 для передачи энергии для того, чтобы определять то, припарковано или нет транспортное средство 20 в предварительно определенной позиции в месте 32 для парковки. Второй режим возбуждения является шаблоном возбуждения, сильнее первого режима возбуждения. Затем если определено то, что транспортное средство 20 припарковано в предварительно определенной позиции в месте 32 для парковки, третий режим возбуждения задается для катушки 11 для передачи энергии для того, чтобы в беспроводном режиме подавать энергию.
[0017] Далее описывается первый режим возбуждения в отношении временной диаграммы, показанной на фиг. 4. На фиг. 4, часть (a) показывает форму сигнала тока I1, протекающего через катушку 11 для передачи энергии, часть (b) показывает форму сигнала тока I2, протекающего через катушку 21 для приема энергии, и часть (c) показывает форму сигнала тока, полученного посредством выполнения двухполупериодного выпрямления для тока I2. Дополнительно, часть (d) показывает ток IL, полученный посредством сглаживания тока I2 после двухполупериодного выпрямления, часть (e) показывает выходное напряжение Vout из выпрямляюще-сглаживающей схемы 22, и часть (f) показывает логическую схему, указывающую 0 или 1, распознанное из выходного напряжения Vout. В первом режиме возбуждения, идентифицирующий идентификатор (идентификационные данные) задается посредством шаблона возбуждения катушки 11 для передачи энергии.
[0018] В первом режиме возбуждения, как показано в части (a) по фиг. 4, слабый импульсный ток P0 принудительно протекает через катушку 11 для передачи энергии в качестве стартового бита. Когда транспортное средство 20 приближается к месту 32 для парковки, ток I2 протекает через катушку 21 для приема энергии, как показано в части (b) по фиг. 4. Посредством выпрямления этого тока I2, получается ток |I2|, показанный в части (c) по фиг. 4. Затем посредством сглаживания этого тока |I2|, получается ток IL, показанный в части (d) по фиг. 4.
[0019] Как показано в части (e) по фиг. 4, по мере того, как ток IL протекает через выпрямляюще-сглаживающую схему 22, выходное напряжение Vout повышается во время t0, переключатель SW1 включается, когда выходное напряжение Vout превышает пороговое напряжение Vth, и выходное напряжение Vout затем падает. После стартового бита, импульсные токи P1, P2, P3, P4 принудительно протекают во времена t1, t2, t3, t4, соответственно, с тем чтобы задавать четырехбитовый идентифицирующий идентификатор. В частности, ток I1 принудительно протекает, как показано посредством P1, P2, P4, с тем чтобы задавать логическую "1", и ток I1 не протекает принудительно, как показано посредством P3, с тем чтобы задавать логический "0". В примере, показанном на фиг. 4, формируется идентифицирующий идентификатор "1, 1, 0, 1".
[0020] Затем если идентифицирующий идентификатор, заданный посредством наземного модуля 51, и идентифицирующий идентификатор, распознанный посредством контроллера 24 транспортного средства на основе выходного напряжения Vout, совпадают между собой, транспортное средство 20 и наземный модуль 51 определяются как спаренные между собой. В общем, транспортное средство 20 и место 32 для парковки могут спариваться между собой посредством задания первого режима возбуждения для катушки 11 для передачи энергии. Кроме того, хотя иллюстрация опускается на фиг. 4, стоповый бит может передаваться после идентифицирующего идентификатора "1, 1, 0, 1". Между тем, предусмотрено множество способов для первого режима возбуждения, и подробности описываются во втором-девятом вариантах осуществления.
[0021] Далее описывается второй режим возбуждения. После того, как первый режим возбуждения задается для катушки 11 для передачи энергии, и спаривание между транспортным средством 20 и наземным модулем 51 завершается, как упомянуто выше, второй режим возбуждения задается для катушки 11 для передачи энергии для того, чтобы определять то, является или нет припаркованная позиция транспортного средства 20 в месте 32 для парковки позицией выполнения процесса заряда.
[0022] Наземный контроллер 13 задает второй режим возбуждения для катушки 11 для передачи энергии, который слабее режима возбуждения во время заряда аккумулятора (третьего режима возбуждения), посредством обеспечения принудительного протекания тока ниже тока во время заряда аккумулятора (третьего режима возбуждения) через катушку 11 для передачи энергии. В частности, во втором режиме возбуждения, ток, который принудительно протекает через катушку 11 для передачи энергии, задается таким образом, что может подаваться энергия, имеющая предварительно установленное значение команды управления подачей энергии. Контроллер 24 транспортного средства обнаруживает энергию, принимаемую посредством катушки 21 для приема энергии, и дополнительно вычисляет эффективность Q1 передачи энергии на основе значения команды управления подачей энергии. Затем определяется то, достигает или нет транспортное средство 20 позиции выполнения процесса заряда, на основе этой эффективности Q1 передачи энергии. Другими словами, определяется то, присутствует или нет катушка 21 для приема энергии в диапазоне выполнения процесса заряда, в котором она может быть заряжена посредством катушки 11 для передачи энергии.
[0023] В частности, по мере того как транспортное средство 20 въезжает в место 32 для парковки, катушка 11 для передачи энергии и катушка 21 для приема энергии приближаются друг к другу, и когда катушка 11 для передачи энергии и катушка 21 для приема энергии совпадают между собой, по меньшей мере, частично, магнитный поток, сформированный в катушке 11 для передачи энергии, связывается с катушкой 21 для приема энергии, так что энергия передается и заряжает аккумулятор 23. Дополнительно, по мере того, как возрастает площадь перекрывающихся областей, магнитный поток, связываемый с катушкой 21 для приема энергии, увеличивается, и эффективность передачи энергии повышается, соответственно. Напротив, по мере того, как уменьшаются перекрывающиеся области катушки 11 для передачи энергии и катушки 21 для приема энергии, поток рассеяния увеличивается, и эффективность передачи энергии падает, соответственно. Затем можно определять то, припарковано или нет транспортное средство 20 в позиции выполнения процесса заряда в месте 32 для парковки, т.е. можно определять то, присутствует или нет катушка 21 для приема энергии в диапазоне выполнения процесса заряда посредством задания пороговой эффективности Qth, указывающей нижний предел эффективности передачи энергии, и обнаружения того, превышает или нет эффективность Q1 передачи энергии пороговую эффективность Qth.
[0024] Между тем, когда площадь перекрывающихся областей катушки 11 для передачи энергии и катушки 21 для приема энергии является небольшой, время, требуемое для беспроводного заряда, является большим, но тем не менее, заряд является возможным. Таким образом, эффективность передачи энергии в момент, когда, по меньшей мере, часть магнитного потока связывается, может задаваться в качестве вышеуказанной пороговой эффективности Qth.
[0025] Следует отметить, что контроллер 24 транспортного средства не обязательно должен вычислять эффективность Q1 передачи энергии. Наземный контроллер 13 может вычислять эффективность Q1 передачи энергии. В этом случае, данные по энергии, принимаемой посредством катушки 21 для приема энергии, могут передаваться в наземный контроллер 13 через модуль 25 связи и модуль 14 связи, и наземный контроллер 13 может вычислять эффективность Q1 передачи энергии.
[0026] Здесь, во втором режиме возбуждения, ток, который принудительно протекает через катушку 11 для передачи энергии, выше тока, который принудительно протекает через нее в первом режиме возбуждения. Это должно предотвращать ложное распознавание посредством контроллера 24 транспортного средства того, что второй режим возбуждения задается для катушки 11 для передачи энергии в то время, когда первый режим возбуждения задается для катушки 11 для передачи энергии.
[0027] После этого, если в результате вышеописанного второго режима возбуждения определяется то, что катушка 21 для приема энергии присутствует в диапазоне выполнения процесса перезаряда, наземный контроллер 13 задает третий режим возбуждения для катушки 11 для передачи энергии, чтобы подавать энергию для заряда аккумулятора.
[0028] Далее описывается процедура обработки посредством наземного контроллера 13 и контроллера 24 транспортного средства в отношении схем последовательности сигналов, показанных на фиг. 17-21. Во-первых, на этапе a1 на фиг. 17, наземный контроллер 13 находится в режиме ожидания. Затем по мере того, как транспортное средство 20 приближается к месту 32 для парковки на этапе b1, контроллер 24 транспортного средства передает на этапе b2 аутентификационный идентификатор, предоставленный для транспортного средства 20, в устройство 101 передачи энергии через радиосвязь. Для этой связи может использоваться, например, беспроводная LAN.
[0029] Наземный контроллер 13 принимает аутентификационный идентификатор на этапе a2 и аутентифицирует принимаемый аутентификационный идентификатор на этапе a3. В одном примере, наземный контроллер 13 определяет то, является или нет принимаемый аутентификационный идентификатор аутентификационным идентификатором, выданным транспортному средству 20, которому разрешается выполнять заряд, и аутентифицирует аутентификационный идентификатор, если транспортному средству 20 разрешено выполнять заряд.
[0030] На этапе a4, наземный контроллер 13 активирует наземный модуль 51. Дополнительно, на этапе a5, наземный контроллер 13 передает сигнал, указывающий то, что наземный модуль 51 активируется, в контроллер 24 транспортного средства через беспроводную связь. На этапе a6, наземный контроллер 13 приводит в действие датчик 33 обнаружения транспортных средств. На этапе a7, наземный контроллер 13 ожидает приближения транспортного средства 20.
[0031] С другой стороны, на этапе b3, контроллер 24 транспортного средства уведомляет пользователя (к примеру, пассажира транспортного средства 20) в отношении того, что наземный модуль 51 активируется. На этапе b4, контроллер 24 транспортного средства ожидает сигнала спаривания из наземного контроллера 13. При этом транспортное средство 20 продолжает приближение к месту 32 для парковки. Иными словами, транспортное средство 20 приближается к месту 32 для парковки, как показано на фиг. 24.
[0032] Когда транспортное средство 20 въезжает в место 32 для парковки на этапе b5, датчик 33 обнаружения транспортных средств обнаруживает въезд транспортного средства 20 на этапе a8. В частности, когда транспортное средство 20 достигает внутренней части диапазона обнаружения датчика 33 обнаружения транспортных средств, установленного в месте 32 для парковки, как показано на фиг. 25, датчик 33 обнаружения транспортных средств обнаруживает то, что транспортное средство 20 въезжает в место 32 для парковки. На этапе b6, контроллер 24 транспортного средства продолжает ожидание спаривания.
[0033] На этапе a9, наземный контроллер 13 начинает первый режим возбуждения. В частности, как показано в вышеуказанной части (a) по фиг. 4, наземный контроллер 13 обеспечивает принудительное протекание импульсных токов через катушку 11 для передачи энергии на предварительно определенной частоте, так что ток P0, служащий в качестве стартового битового сигнала, и токи P1-P4, указывающие четырехбитовый идентифицирующий идентификатор, принудительно протекают через нее. Наземный контроллер 13 многократно обеспечивает принудительное протекание токов P0, P1-P4. Наземный контроллер 13 ожидает запроса на спаривание на этапе a10 и продолжает первый режим возбуждения на этапе a11.
[0034] Когда катушка 21 для приема энергии, смонтированная на транспортном средстве 20, входит в диапазон N1 возбуждения катушки 11 для передачи энергии, показанный на фиг. 26, на этапе b7, контроллер 24 транспортного средства принимает четырехбитовый идентифицирующий идентификатор на этапе b8. В частности, контроллер 24 транспортного средства распознает идентифицирующий идентификатор "1, 1, 0, 1", как показано в части (f) по фиг. 4, на основе взаимосвязи по абсолютной величине между выходным напряжением Vout и пороговым напряжением Vth, показанными в части (e) по фиг. 4.
[0035] На этапе b9, контроллер 24 транспортного средства передает распознанный идентифицирующий идентификатор в наземный контроллер 13, чтобы запрашивать спаривание. На этапе a12, наземный контроллер 13 принимает передаваемый идентифицирующий идентификатор. На этапе a13, транспортное средство 20 и наземный модуль 51 спариваются между собой. В частности, транспортное средство 20 и наземный модуль 51 спариваются между собой, если четырехбитовый идентифицирующий идентификатор, передаваемый посредством наземного модуля 51, и четырехбитовый идентифицирующий идентификатор, принятый посредством устройства 102 приема энергии, совпадают между собой.
[0036] Затем на этапе a14, наземный модуль 51 изменяет ток, который принудительно протекает через катушку 11 для передачи энергии, с тем чтобы задавать второй режим возбуждения для катушки 11 для передачи энергии. Иными словами, наземный модуль 51 начинает второй режим возбуждения. На этапе b10, контроллер 24 транспортного средства начинает определение того, достигает или нет транспортное средство 20 позиции выполнения процесса заряда в месте 32 для парковки. В частности, как показано на фиг. 27, контроллер 24 транспортного средства определяет то, что транспортное средство 20 достигает позиции выполнения процесса заряда, когда площадь перекрытия между катушкой 21 для приема энергии и катушкой 11 для передачи энергии увеличивается, и эффективность Q1 передачи энергии, соответственно, повышается и превышает эффективность предварительно установленного порогового значения Qth. Контроллер 24 транспортного средства может определять то, что транспортное средство 20 достигает позиции выполнения процесса заряда, если, например, катушка 21 для приема энергии присутствует в диапазоне N2 возможности подачи энергии.
[0037] Если транспортное средство 20 входит в диапазон выполнения процесса заряда в месте 32 для парковки на этапе b11 на фиг. 18, а также второй режим возбуждения катушки 11 для передачи энергии продолжается на этапе a15, контроллер 24 транспортного средства на этапе b12 определяет то, превышает или нет эффективность Q1 передачи энергии пороговую эффективность Qth. То, превышает или нет эффективность Q1 передачи энергии пороговую эффективность Qth, может определяться на основе абсолютной величины напряжения, сформированного в катушке 21 для приема энергии посредством возбуждения. Если Q1>Qth, контроллер 24 транспортного средства уведомляет пользователя на этапе b13 в отношении того, что аккумулятор 23 теперь может быть заряжен, посредством дисплея (не показан) и т.п.
[0038] На этапе b14, контроллер 24 транспортного средства выполняет процесс определения отмены. Этот процесс определяет то, следует или нет выполнять заряд, на основе того, вводит или нет пользователь операцию отмены. Подробности поясняются ниже со ссылкой на фиг. 19.
[0039] Если отсутствует операция отмены, контроллер 24 транспортного средства на этапе b15 определяет то, остановлено или нет транспортное средство 20. Если транспортное средство 20 остановлено, источник энергии транспортного средства выключается на этапе b16. Затем на этапе b17, контроллер 24 транспортного средства передает сигнал запроса начала заряда в наземный контроллер 13.
[0040] На этапе a16, наземный контроллер 13 задает третий режим возбуждения для катушки 11 для передачи энергии. На этапе a17, энергия, предоставляемая в катушку 11 для передачи энергии, подается в беспроводном режиме в катушку 21 для приема энергии, чтобы заряжать аккумулятор 23 (см. фиг. 1). Как описано выше, аккумулятор 23 может быть заряжен посредством задания первого режима возбуждения для катушки 11 для передачи энергии для того, чтобы спаривать наземный модуль 51 и транспортное средство 20 между собой, задания второго режима возбуждения для катушки 11 для передачи энергии для того, чтобы проверять то, припарковано или нет транспортное средство 20 в позиции выполнения процесса заряда в месте 32 для парковки, и после этого беспроводной подачи энергии.
[0041] Далее описываются подробности процесса определения отмены, показанного на этапе b14 на фиг. 18, со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 19. Во-первых, на этапе b31, контроллер 24 транспортного средства обнаруживает напряжение, принимаемое посредством катушки 21 для приема энергии в то время, когда второй режим возбуждения задается для катушки 11 для передачи энергии. На этапе b32, контроллер 24 транспортного средства определяет то, припарковано или нет транспортное средство 20 в позиции выполнения процесса заряда в месте 32 для парковки, на основе определенного напряжения.
[0042] Если транспортное средство 20 не находится в позиции выполнения процесса заряда, контроллер 24 транспортного средства уведомляет пользователя на этапе b38 в отношении того, что транспортное средство 20 неточно совмещено относительно предварительно определенной позиции в месте 32 для парковки, и контроллер 24 транспортного средства возвращает процесс на этап b31. С другой стороны, если транспортное средство 20 находится в позиции выполнения процесса заряда, контроллер 24 транспортного средства уведомляет пользователя на этапе b33 в отношении того, что транспортное средство 20 припарковано в позиции выполнения процесса заряда. Дополнительно, на этапе b34, контроллер 24 транспортного средства отображает кнопку отмены на дисплее (не показан).
[0043] На этапе S35, контроллер 24 транспортного средства определяет то, выполняет или нет пользователь операцию отмены. Если пользователь выполняет операцию отмены, контроллер 24 транспортного средства передает сигнал команды управления для того, чтобы прекращать второй режим возбуждения, в наземный модуль 51 на этапе b39. На этапе b40, контроллер 24 транспортного средства прекращает беспроводную связь с наземным контроллером 13.
[0044] С другой стороны, если пользователь не выполняет операцию отмены, контроллер 24 транспортного средства на этапе b36 определяет то, выключен или нет источник энергии транспортного средства. Если источник энергии транспортного средства выключен, контроллер 24 транспортного средства определяет то, что транспортное средство 20 готово к заряду, и передает запрос начала заряда в наземный модуль 51 на этапе b37. Контроллер 24 транспортного средства затем заканчивает этот процесс. Пользователь транспортного средства 20 может выполнять операцию отмены таким образом.
[0045] Далее описывается обработка, выполняемая в случае, если транспортное средство 20 покидает позицию выполнения процесса заряда, в отношении схемы последовательности сигналов, показанной на фиг. 20. Эта обработка выполняется после этапа a14 и этапа b10, которые показаны на фиг. 17. На этапе b32, транспортное средство 20 покидает место 32 для парковки по такой причине, как изменение места для парковки. Затем на этапе a32, наземный контроллер 13 обнаруживает то, что транспортное средство 20 покидает место 32 для парковки, на основе сигнала обнаружения датчика 33 обнаружения транспортных средств.
[0046] На этапе a33, наземный контроллер 13 передает сигнал запроса для того, чтобы разъединять спаривание с транспортным средством 20. В частности, поскольку наземный модуль 51 и транспортное средство 20 спарены между собой посредством первого режима возбуждения, это спаривание должно разъединяться, если аккумулятор 23 не должен быть заряжен. Таким образом, наземный контроллер 13 передает сигнал запроса на разъединение спаривания.
[0047] На этапе b33, контроллер 24 транспортного средства принимает сигнал запроса на разъединение спаривания. Дополнительно, на этапе b34, контроллер 24 транспортного средства передает сигнал, указывающий разъединение спаривания, в наземный модуль 51. В ответ, наземный контроллер 13 разъединяет спаривание с транспортным средством 20. После этого, при отмене пользователем на этапе b35, контроллер 24 транспортного средства прекращает беспроводную связь на этапе b36.
[0048] С другой стороны, на этапе a34, наземный контроллер 13 разъединяет спаривание с транспортным средством 20. На этапе a35, наземный контроллер 13 прекращает второй режим возбуждения катушки 11 для передачи энергии. Затем на этапе a36, наземный контроллер 13 продолжает обнаружение того, припарковано или нет транспортное средство 20 в месте 32 для парковки. После этого, если беспроводная связь с контроллером 24 транспортного средства прекращена, наземный контроллер 13 прекращает обнаружение позиции транспортного средства с помощью датчика 33 обнаружения транспортных средств на этапе a37.
[0049] Фиг. 28 является пояснительной схемой, показывающей движение транспортного средства 20, покидающего позицию выполнения процесса заряда. Как показано на фиг. 28, когда транспортное средство 20 покидает позицию выполнения процесса заряда, транспортное средство 20 выходит из диапазона обнаружения датчика 33 обнаружения транспортных средств, и в силу этого спаривание разъединяется. Когда пользователь в конечном счете выполняет операцию отмены заряда, спаривание разъединяется, и возбуждение катушки 11 для передачи энергии прекращается.
[0050] Далее описывается обработка для изменения позиции для парковки транспортного средства 20 с места 32 для парковки для наземного модуля 51 на место 32a для парковки для наземного модуля 51a в отношении схемы последовательности сигналов, показанной на фиг. 21, и схемы движения, показанной на фиг. 29. Следует отметить, что ниже, для того чтобы отличать наземные модули 51, 51a, позиционное обозначение 51 обозначает первый наземный модуль, а позиционное обозначение 51a обозначает второй наземный модуль. Аналогично, для того чтобы отличать места 32, 32a для парковки, позиционное обозначение 32 обозначает первое место для парковки, а позиционное обозначение 32a обозначает второе место для парковки.
[0051] Обработка, показанная на фиг. 21, выполняется после этапа a14 и этапа b10, которые показаны на фиг. 17. Когда транспортное средство 20 выходит из диапазона возбуждения (N1, показанного на фиг. 29) катушки 11 для передачи энергии первого наземного модуля 51 на этапе b52, контроллер 24 транспортного средства обнаруживает понижение напряжения, сформированного в катушке 21 для приема энергии, на этапе b53. В частности, по мере того, как уменьшается площадь перекрытия между катушкой 11 для передачи энергии и катушкой 21 для приема энергии, напряжение, сформированное в катушке 21 для приема энергии, падает. Затем посредством обнаружения падения напряжения, контроллер 24 транспортного средства может распознавать то, что транспортное средство 20 выходит из диапазона N1 возбуждения.
[0052] Контроллер 24 транспортного средства передает сигнал запроса на разъединение спаривания в наземный контроллер 13 на этапе b54 и разъединяет спаривание на этапе b55. В частности, поскольку транспортное средство 20 не заряжает аккумулятор 23 в первом месте 32 для парковки, спаривание между первым наземным модулем 51 и транспортным средством 20 разъединяется. С другой стороны, наземный контроллер 13 принимает сигнал запроса на разъединение спаривания на этапе a52 и разъединяет спаривание на этапе a53. Затем на этапе a54, наземный контроллер 13 начинает первый режим возбуждения. Иными словами, наземный контроллер 13 заканчивает второй режим возбуждения и начинает первый режим возбуждения.
[0053] Между тем, на этапе c51, второй наземный модуль 51a находится в режиме ожидания. При приеме беспроводной связи из контроллера 24 транспортного средства на этапе c52, второй наземный модуль 51a приводит в действие датчик 33a обнаружения транспортных средств.
[0054] После этого, когда транспортное средство 20 покидает первое место 32 для парковки на этапе b56, наземный контроллер 13 первого наземного модуля 51 прекращает первый режим возбуждения на этапе a55. Когда транспортное средство 20 въезжает во второе место 32a для парковки на этапе b57, наземный контроллер 13 второго наземного модуля 51a на этапе c53 обнаруживает то, что транспортное средство 20 въезжает во второе место 32a для парковки. Дополнительно, наземный контроллер 13 второго наземного модуля 51a начинает первый режим возбуждения на этапе c54.
[0055] Далее выполняется обработка, аналогичная обработке, описанной выше, так что второй наземный модуль 51a и транспортное средство 20 спариваются между собой на этапе b58. С другой стороны, датчик 33 обнаружения транспортных средств первого наземного модуля 51 деактивирован на этапе a56. Как описано выше, в случае если пользователь транспортного средства 20 изменяет позицию для парковки транспортного средства 20 с первого места 32 для парковки на второе место32a для парковки, выполняется вышеуказанная обработка, и аккумулятор 23 в силу этого может быть заряжен с использованием второго наземного модуля 51a.
[0056] Далее описывается подробная процедура процесса спаривания, выполняемого в системе беспроводной подачи энергии согласно этому варианту осуществления, в отношении блок-схем последовательности операций способа, показанных на фиг. 22 и 23. Фиг. 23 является блок-схемой последовательности операций способа, показывающей процедуру обработки посредством управления наземным контроллером 13. Эта обработка выполняется, когда датчик 33 обнаружения транспортных средств обнаруживает то, что транспортное средство 20 приближается к требуемой позиции в месте 32 для парковки.
[0057] Во-первых, на этапе S11, наземный контроллер 13 выполняет процесс начала слабой связи на основе возбуждения для задания первого режима возбуждения. Дополнительно, на этапе S12, наземный контроллер 13 ожидает приема команды для начала слабого возбуждения. На этапе S13, наземный контроллер 13 определяет то, выдана или нет команда для того, чтобы начинать слабое возбуждение. Если выдана команда начала ("Да" на этапе S13), наземный контроллер 13 переводит обработку на этап S14.
[0058] На этапе S14, наземный контроллер 13 возбуждает катушку 11 для передачи энергии посредством подачи тока начального бита в нее. Затем на этапе S15, наземный контроллер 13 возбуждает катушку 11 для передачи энергии посредством подачи токов идентифицирующих идентификаторов в нее. Дополнительно на этапе S16, наземный контроллер 13 возбуждает катушку 11 для передачи энергии посредством подачи тока стопового бита в нее.
[0059] На этапе S17, наземный контроллер 13 определяет то, принимается или нет сигнал подтверждения приема из контроллера 24 транспортного средства. На этапе S18, наземный контроллер 13 определяет то, следует или нет прекращать слабое возбуждение. Наземный контроллер 13 прекращает слабое возбуждение при определении на этапе S18 того, что сигнал подтверждения приема принимается. С другой стороны, наземный контроллер 13 возвращается в процесс на этапе S14 при определении того, что сигнал подтверждения приема еще не принят. На этапе S19, наземный контроллер 13 прекращает слабое возбуждение. Иными словами, наземный контроллер 13 заканчивает первый режим возбуждения, когда спаривание завершается.
[0060] Далее описывается процедура обработки посредством контроллера 24 транспортного средства со ссылкой на блок-схему последовательности операций способа на фиг. 23. Во-первых, контроллер 24 транспортного средства выполняет процесс начала связи на основе слабого возбуждения на этапе S31 и передает сигнал, указывающий начало слабого возбуждения, на этапе S32. Контроллер 24 транспортного средства очищает буфер приема (не показан) на этапе S33.
[0061] На этапе S34, контроллер 24 транспортного средства ожидает стартового бита. На этапе S35, контроллер 24 транспортного средства определяет то, принимается или нет стартовый бит. Если стартовый бит принимается ("Да" на этапе S35), контроллер 24 транспортного средства выполняет процесс синхронизации на этапе S36. В этом процессе, синхронизация выполняется на основе времени стартового бита, передаваемого посредством катушки 11 для передачи энергии, и времени стартового бита, принимаемого посредством катушки 21 для приема энергии.
[0062] На этапе S37, контроллер 24 транспортного средства выполняет процесс приема. В этом процессе, контроллер 24 транспортного средства принимает идентифицирующий идентификатор, передаваемый посредством катушки 11 для передачи энергии. На этапе S38, контроллер 24 транспортного средства подсчитывает число битов. В этом варианте осуществления, четырехбитовый идентифицирующий идентификатор задается в качестве одного примера. Таким образом, на этапе S39, контроллер 24 транспортного средства определяет то, принят или нет четырехбитовый идентифицирующий идентификатор. Контроллер 24 транспортного средства возвращается в процесс на этапе S36, если число битов меньше предварительно определенного числа ("Нет" на этапе S39). С другой стороны, контроллер 24 транспортного средства переводит обработку на этап S40, если число битов составляет предварительно определенное число ("Да" на этапе S39).
[0063] На этапе S40, контроллер 24 транспортного средства проверяет принятый четырехбитовый идентифицирующий идентификатор. На этапе S41, контроллер 24 транспортного средства определяет то, совпадают или нет принятый идентифицирующий идентификатор с идентифицирующим идентификатором, назначенным месту 32 для парковки. Если идентифицирующие идентификаторы не совпадают между собой ("Нет" на этапе S41), контроллер 24 транспортного средства возвращает обработку на этап S34. Если идентифицирующие идентификаторы совпадают между собой ("Да" на этапе S41), контроллер 24 транспортного средства передает стоповый сигнал слабого возбуждения в наземный контроллер 13 через модуль 25 связи на этапе S42. Затем на этапе S43, контроллер 24 транспортного средства заканчивает процесс обмена идентифицирующими идентификаторами через первый режим возбуждения.
[0064] Как описано выше, в системе беспроводной подачи энергии согласно первому варианту осуществления, когда датчик 33 обнаружения транспортных средств обнаруживает то, что транспортное средство 20 приближается к месту 32 для парковки, токи принудительно протекает через катушку 11 для передачи энергии, с тем чтобы задавать первый режим возбуждения для катушки 11 для передачи энергии и передавать идентифицирующий идентификатор. Затем контроллер 24 транспортного средства распознает идентифицирующий идентификатор. Если этот идентифицирующий идентификатор и идентифицирующий идентификатор, передаваемый посредством катушки 11 для передачи энергии, совпадают между собой, спаривание между этим местом 32 для парковки и транспортным средством 20 завершается. Иными словами, одно из множества мест 32 для парковки и транспортное средство 20 спариваются между собой. Следовательно, соединение устанавливается между транспортным средством 20, нуждающимся в заряде аккумулятора, и наземным модулем 51, который подает энергию.
[0065] Затем ток, который принудительно протекает через катушку 11 для передачи энергии, изменяется, с тем чтобы задавать второй режим возбуждения для катушки 11 для передачи энергии, и эффективность Q1 передачи энергии вычисляется из энергии, принимаемой посредством катушки 21 для приема энергии в этом состоянии. После этого, когда эффективность Q1 передачи энергии превышает пороговую эффективность Qth, транспортное средство 20 определяется как находящееся в диапазоне выполнения процесса заряда, и в силу этого третий режим возбуждения задается для катушки 11 для передачи энергии, так что аккумулятор 23 начинает заряжаться.
[0066] Таким образом, наземный контроллер 13 может немедленно распознавать то, что транспортное средство 20 приближается к месту 32 для парковки. Следовательно, может сокращаться время, требуемое для того, чтобы задавать второй режим возбуждения для катушки 11 для передачи энергии, а затем третий режим возбуждения. Как результат, можно предотвращать ожидание пользователя транспортного средства в течение длительного времени.
[0067] Кроме того, когда второй режим возбуждения задается для катушки 11 для передачи энергии, ток, который принудительно протекает через нее, задается выше тока в первом режиме возбуждения. Другими словами, второй режим возбуждения сильнее первого режима возбуждения. Таким образом, можно предотвращать ложное обнаружение между первым режимом возбуждения и вторым режимом возбуждения. Дополнительно, в то время когда второй режим возбуждения задается для катушки 11 для передачи энергии, эффективность Q1 передачи энергии вычисляется на основе энергии, передаваемой в катушку 21 для приема энергии, и определяется то, что катушка 21 для приема энергии присутствует в диапазоне выполнения процесса заряда относительно катушки 11 для передачи энергии, когда эффективность Q1 передачи энергии превышает пороговую эффективность Qth. Таким образом, можно выяснить, когда катушка 21 для приема энергии достигает диапазона выполнения процесса заряда без предоставления такого датчика, как камера, в транспортном средстве 20. Следовательно, может упрощаться конфигурация устройства.
[0068] Кроме того, выпрямляюще-сглаживающая схема 22 устройства 102 приема энергии содержит разрядную схему 26. Таким образом, абсолютная величина напряжения во время распознавания идентифицирующего идентификатора может быть постоянной. Следовательно, может повышаться точность распознавания идентифицирующего идентификатора.
[0069] Описание второго варианта осуществления
Далее поясняется второй вариант осуществления настоящего изобретения. Конфигурация системы является аналогичной конфигурации системы на вышеуказанном фиг. 1. Система беспроводной подачи энергии согласно второму варианту осуществления отличается от вышеописанного первого варианта осуществления шаблоном возбуждения в первом режиме возбуждения. Ниже описывается работа системы беспроводной подачи энергии согласно второму варианту осуществления в отношении временной диаграммы, показанной на фиг. 5. В вышеописанном первом варианте осуществления, после того, как передается стартовый бит, шаблон возбуждения, который обеспечивает принудительное протекание тока I1, используется, когда идентифицирующий идентификатор указывает 1 (см. P1, P2, P4 на фиг. 4), тогда как шаблон возбуждения, который не обеспечивает принудительное протекание тока I1, используется, когда идентифицирующий идентификатор указывает 0 (см. P3 на фиг. 4).
[0070] Напротив, во втором варианте осуществления, идентифицирующий идентификатор задается посредством изменения временных интервалов, в которые можно возбуждать катушку 11 для передачи энергии. В частности, для 1, временной интервал от настоящей подачи энергии до времени следующей подачи энергии задается равным T1, показанному на фиг. 5, тогда как для 0, временной интервал до времени следующей подачи энергии задается как T0, превышающее T1. Затем посредством обнаружения временных интервалов формирования тока IL, показанного в части (b) по фиг. 5, контроллер 24 транспортного средства может распознавать идентифицирующий идентификатор "1, 1, 0, 1", как показано в части (c) по фиг. 5.
[0071] Таким образом, аналогично вышеописанному первому варианту осуществления, система беспроводной подачи энергии согласно второму варианту осуществления также может спаривать место 32 для парковки и транспортное средство 20 между собой, и может сокращаться время, требуемое для того, чтобы задавать второй режим возбуждения и третий режим возбуждения для катушки 11 для передачи энергии.
[0072] Описание третьего варианта осуществления
Далее описывается третий вариант осуществления настоящего изобретения. Фиг. 6 является блок-схемой, показывающей конфигурацию системы беспроводной подачи энергии согласно третьему варианту осуществления. Третий вариант осуществления отличается от схемы на фиг. 3, показанной в вышеописанных первом и втором вариантах осуществления, позицией, в которой присоединяется разрядная схема 26, сформированная из резистора R4 и переключателя SW1. В частности, разрядная схема 26 соединяется с обоими контактными выводами конденсатора C3. Другие признаки конфигурации являются аналогичными признакам конфигурации схемы, показанной на фиг. 3.
[0073] Кроме того, в системе беспроводной подачи энергии согласно третьему варианту осуществления, переключатель SW1 включается, за счет этого разряжая напряжение, заряженное в конденсаторе C3 (сглаживающем конденсаторе), когда выходное напряжение Vout превышает пороговое напряжение Vth. Следовательно, выходное напряжение Vout может быть понижено. Таким образом, аналогично вышеописанным первому и второму вариантам осуществления, система беспроводной подачи энергии согласно третьему варианту осуществления может также спаривать место 32 для парковки и транспортное средство 20 между собой, и может сокращаться время, требуемое для того, чтобы задавать второй режим возбуждения и третий режим возбуждения для катушки 11 для передачи энергии.
[0074] Описание четвертого варианта осуществления
Далее описывается четвертый вариант осуществления настоящего изобретения. Фиг. 7 является блок-схемой, показывающей конфигурацию системы беспроводной подачи энергии согласно четвертому варианту осуществления. Как показано на фиг. 7, система беспроводной подачи энергии согласно четвертому варианту осуществления отличается от систем, показанных на фиг. 3 и 6, тем, что разрядная схема 26, сформированная из резистора R4 и переключателя SW1, не монтируется. В частности, в вышеописанных первом-третьем вариантах осуществления, переключатель SW1 включается, чтобы понижать выходное напряжение Vout, когда выходное напряжение Vout превышает пороговое напряжение Vth. Напротив, в четвертом варианте осуществления, в то время как конденсаторы C3, C4 не заряжаются, напряжение, заряженное в конденсаторе C1, сбрасывается посредством разрядного резистора R3, чтобы понижать выходное напряжение Vout.
[0075] Далее описывается работа системы беспроводной подачи энергии согласно четвертому варианту осуществления в отношении временной диаграммы, показанной на фиг. 8. Когда ток IL, указывающий стартовый бит, протекает во время t1, выходное напряжение Vout повышается и превышает пороговое напряжение Vth. Когда ток IL затем уменьшается во время t2, напряжение в конденсаторе C1, показанном на фиг. 7, разряжается через разрядный резистор R3, так что выходное напряжение Vout снижается. После этого, когда ток IL для указания логической схемы 1 протекает во время t3, выходное напряжение Vout повышается снова и превышает пороговое напряжение Vth, и выходное напряжение Vout снижается во время t4. Посредством выполнения аналогичной операции в последующие времена t5-t9 могут распознаваться логические схемы "1, 1, 0, 1". Последующая обработка является аналогичной обработке в вышеописанных первом-третьем вариантах осуществления. Между тем, части (a) и (b) по фиг. 9 показывают форму сигнала логических схем "1, 1, 1, 1", тогда как части (c) и (d) по фиг. 9 показывают форму сигнала логических схем "1, 0, 1, 0".
[0076] Таким образом, аналогично вышеописанным первому-третьему вариантам осуществления, система беспроводной подачи энергии согласно четвертому варианту осуществления также может спаривать место 32 для парковки и транспортное средство 20 между собой, и может сокращаться время, требуемое для того, чтобы задавать второй режим возбуждения и третий режим возбуждения для катушки 11 для передачи энергии. Помимо этого, поскольку разрядная схема 26 не должна предоставляться, может упрощаться конфигурация устройства.
[0077] Описание пятого варианта осуществления
Далее поясняется пятый вариант осуществления настоящего изобретения. Конфигурация системы является аналогичной конфигурации системы на фиг. 7, показанной в четвертом варианте осуществления, и в силу этого описание конфигурации опускается. Фиг. 10 является временной диаграммой, показывающей работу системы беспроводной подачи энергии согласно пятому варианту осуществления, и части (a), (b) и (c) показывают выходное напряжение Vout, ток IL и логические схемы, соответственно. Фиг. 10 показывает пример передачи логических схем "1, 1, 1, 0". Ток IL, указывающий стартовый бит, протекает во время t1, показанное на фиг. 10, а затем токи IL протекают во времена t2, t3, t4, t5. Для логической схемы 1, количество времени до момента, когда протекает следующий ток IL, задается как T1, тогда как для логической схемы 0 количество времени до момента, когда протекает следующий ток IL, задается как T0 (T0>T1). Таким образом, могут распознаваться логические схемы 1 и 0. Между тем, в случае логических схем "1, 0, 1, 0", выходное напряжение Vout изменяется, как показано в части (a) по фиг. 11, и могут распознаваться логические схемы "1, 0, 1, 0", как показано в части (b) по фиг. 11.
[0078] Таким образом, аналогично вышеописанным первому-четвертому вариантам осуществления, система беспроводной подачи энергии согласно пятому варианту осуществления также может спаривать место 32 для парковки и транспортное средство 20 между собой, и может сокращаться время, требуемое для того, чтобы задавать второй режим возбуждения и третий режим возбуждения для катушки 11 для передачи энергии. Помимо этого, поскольку разрядная схема 26 не должна предоставляться, может упрощаться конфигурация устройства.
[0079] Фиг. 12 является временной диаграммой, показывающей модификацию пятого варианта осуществления. В этой модификации, интервал между токами IL изменяется согласно четырем различным интервалам T1, T2, T3, T0, так что задается двухбитовая логическая схема. Таким образом, могут задаваться четыре различных логических схемы 0, 1, 2, 3, за счет этого обеспечивая возможность задания большего числа комбинаций для идентифицирующего идентификатора. Следует отметить, что вместо этого могут использоваться три или более битов.
[0080] Описание шестого варианта осуществления
Далее описывается шестой вариант осуществления настоящего изобретения. Фиг. 13 является блок-схемой, показывающей конфигурацию системы беспроводной подачи энергии согласно шестому варианту осуществления. Как показано на фиг. 13, в шестом варианте осуществления, позиция, в которой присоединяется датчик 27 напряжения, изменяется относительно позиции в схеме, показанной на фиг. 7. В частности, датчик 27 напряжения присоединяется к обоим контактным выводам конденсатора C3, и напряжение, сформированное в конденсаторе C, является выходным напряжением Vout. Другие признаки конфигурации являются аналогичными признакам конфигурации во втором варианте осуществления. Кроме того, шестой вариант осуществления также позволяет достигать преимуществ, аналогичных преимуществам вышеописанных первого-пятого вариантов осуществления.
[0081] Описание седьмого варианта осуществления
Далее описывается седьмой вариант осуществления настоящего изобретения. Фиг. 14 является блок-схемой, показывающей конфигурацию системы беспроводной подачи энергии согласно седьмому варианту осуществления. Как показано на фиг. 14, седьмой вариант осуществления отличается от схемы, показанной на фиг. 7, тем, что датчик 41 тока, выполненный с возможностью измерять ток, протекающий через катушку L, предоставляется вместо датчика 27 напряжения. В седьмом варианте осуществления, логические схемы обнаруживаются на основе тока Ic, измеряемого посредством датчика 41 тока. Седьмой вариант осуществления также позволяет достигать преимуществ, аналогичных преимуществам вышеописанных первого-пятого вариантов осуществления.
[0082] Описание восьмого варианта осуществления
Далее описывается восьмой вариант осуществления настоящего изобретения. Фиг. 15 является блок-схемой, показывающей конфигурацию системы беспроводной подачи энергии согласно восьмому варианту осуществления. Как показано на фиг. 15, восьмой вариант осуществления отличается от схемы, показанной на фиг. 7, тем, что датчик 41 тока, выполненный с возможностью измерять выходной ток из мостовой схемы, предоставляется вместо датчика 27 напряжения. В восьмом варианте осуществления, логические схемы обнаруживаются на основе тока Ic, измеряемого посредством датчика 41 тока. Восьмой вариант осуществления также позволяет достигать преимуществ, аналогичных преимуществам вышеописанных первого-пятого вариантов осуществления.
[0083] Описание девятого варианта осуществления
Далее описывается девятый вариант осуществления настоящего изобретения. Фиг. 16 является блок-схемой, показывающей конфигурацию системы беспроводной подачи энергии согласно девятому варианту осуществления. Как показано на фиг. 16, девятый вариант осуществления отличается от схемы, показанной на фиг. 7, тем, что датчик 41 тока, выполненный с возможностью измерять выходной ток из конденсатора C1, предоставляется вместо датчика 27 напряжения. В девятом варианте осуществления, логические схемы обнаруживаются на основе тока Ic, измеряемого посредством датчика 41 тока. Девятый вариант осуществления также позволяет достигать преимуществ, аналогичных преимуществам вышеописанных первого-пятого вариантов осуществления.
[0084] Выше описаны система беспроводной подачи энергии и устройство передачи энергии настоящего изобретения на основе проиллюстрированных вариантов осуществления. Тем не менее, настоящее изобретение не ограничено ими. Каждый компонент может быть заменен любым компонентом, имеющим аналогичную функцию(и).
Список позиционных обозначений
[0085] 11, 11a - катушка для передачи энергии
12, 12a - силовой модуль
13 - наземный контроллер
14 - модуль связи
15 - источник энергии постоянного тока (voltageVin)
20 - транспортное средство
21 - катушка для приема энергии
22 - выпрямляюще-сглаживающая схема
23 - аккумулятор
24 - контроллер транспортного средства
25 - модуль связи
26 - разрядная схема
27 - датчик напряжения
31 - схема инвертора
32, 32a - место для парковки
33, 33a - датчик обнаружения транспортных средств
41 - датчик тока
51, 51a - наземный модуль
101 - устройство передачи энергии
102 - устройство приема энергии
Использование: в области электротехники. Технический результат – сокращение времени сопряжения передающей и приемной катушек. Согласно изобретению, когда транспортное средство приближается к месту для парковки, наземный контроллер (13) задает первый режим возбуждения для катушки (11) для передачи энергии, при котором катушка (11) для передачи энергии возбуждается в шаблоне возбуждения, содержащем идентификационные данные. Когда задается первый режим возбуждения для катушки (11) для передачи энергии, контроллер 24 транспортного средства получает идентификационные данные из шаблона возбуждения, принимаемого посредством катушки (21) для приема энергии, и передает идентификационные данные в устройство (101) передачи энергии. Затем наземный контроллер (13) определяет то, совпадают между собой или нет идентификационные данные, содержащиеся в шаблоне возбуждения, при задании первого режима возбуждения для катушки (11) передачи энергии, и идентификационные данные, полученные из шаблона возбуждения, принимаемого посредством катушки (21) для приема энергии. Если оба фрагмента идентификационных данных совпадают между собой, наземный контроллер (13) задает второй режим возбуждения для катушки (11) для передачи энергии для определения того, присутствует или нет транспортное средство в позиции выполнения процесса заряда в месте для парковки. 3 н.п. и 4 з.п.ф-лы, 29 ил.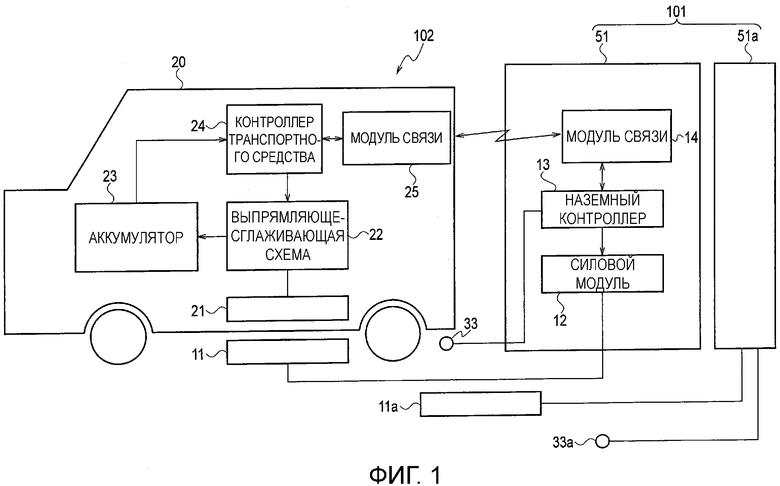
1. Система беспроводной подачи энергии, содержащая устройство передачи энергии и устройство приема энергии и выполненная с возможностью передавать в беспроводном режиме энергию из устройства передачи энергии в устройство приема энергии, причем устройство передачи энергии предоставляется на земле и включает в себя катушку для передачи энергии, установленную в месте для парковки, причем устройство приема энергии предоставляется в транспортном средстве и включает в себя катушку для приема энергии, при этом:
устройство передачи энергии включает в себя:
датчик обнаружения приближения, выполненный с возможностью обнаруживать, когда транспортное средство приближается к месту для парковки,
модуль управления подачей энергии, выполненный с возможностью управлять энергией, которая должна подаваться в катушку для передачи энергии, и
модуль связи на стороне передачи энергии, выполненный с возможностью обмениваться данными с устройством приема энергии,
устройство приема энергии включает в себя:
модуль управления приемом энергии, выполненный с возможностью управлять приемом энергии в катушке для приема энергии, и
модуль связи на стороне приема энергии, выполненный с возможностью обмениваться данными с устройством передачи энергии,
когда транспортное средство приближается к месту для парковки, модуль управления подачей энергии задает первый режим возбуждения для катушки для передачи энергии, при котором катушка для передачи энергии возбуждается в шаблоне возбуждения, содержащем идентификационные данные,
когда первый режим возбуждения задается для катушки для передачи энергии, модуль управления приемом энергии получает идентификационные данные из шаблона возбуждения, принимаемого посредством катушки для приема энергии, и передает идентификационные данные в устройство передачи энергии,
модуль управления подачей энергии определяет то, совпадают или нет между собой идентификационные данные, содержащиеся в шаблоне возбуждения, при задании первого режима возбуждения для катушки для передачи энергии, и идентификационные данные, полученные из шаблона возбуждения, принимаемого посредством катушки для приема энергии,
если фрагменты идентификационных данных совпадают между собой, модуль управления подачей энергии задает второй режим возбуждения для катушки для передачи энергии для определения того, присутствует или нет транспортное средство в позиции
выполнения процесса заряда в месте для парковки, и
устройство приема энергии дополнительно включает в себя:
сглаживающий конденсатор, выполненный с возможностью сглаживать энергию, принимаемую посредством катушки для приема энергии, и
разрядную схему, выполненную с возможностью разряжать энергию, накапливаемую в сглаживающем конденсаторе, когда напряжение, сформированное в сглаживающем конденсаторе, превышает предварительно установленное пороговое напряжение в то время, когда первый режим возбуждения задается для катушки для передачи энергии.
2. Система беспроводной подачи энергии по п. 1, в которой: модуль управления приемом энергии обнаруживает энергию,
принимаемую в то время, когда второй режим возбуждения задается для катушки для передачи энергии,
любой из модуля управления приемом энергии и модуля управления подачей энергии вычисляет эффективность передачи энергии из принимаемой энергии и значения команды управления подачей энергии, заданного для устройства передачи энергии, и
модуль управления подачей энергии определяет то, присутствует или нет транспортное средство в позиции выполнения процесса заряда в месте для парковки, на основе эффективности передачи энергии.
3. Система беспроводной подачи энергии по п. 1 или 2, в которой второй режим возбуждения сильнее первого режима возбуждения.
4. Система беспроводной подачи энергии, содержащая устройство передачи энергии и устройство приема энергии и выполненная с возможностью передавать в беспроводном режиме энергию из устройства передачи энергии в устройство приема энергии, причем устройство передачи энергии предоставляется на земле и включает в себя катушку для передачи энергии, установленную в месте для парковки, причем устройство приема энергии предоставляется в транспортном средстве и включает в себя катушку для приема энергии, при этом:
устройство передачи энергии включает в себя:
датчик обнаружения приближения, выполненный с возможностью обнаруживать, когда транспортное средство приближается к месту для парковки,
модуль управления подачей энергии, выполненный с возможностью управлять энергией, которая должна подаваться в катушку для передачи энергии, и
модуль связи на стороне передачи энергии, выполненный с возможностью обмениваться данными с устройством приема энергии,
устройство приема энергии включает в себя:
модуль управления приемом энергии, выполненный с возможностью управлять приемом энергии в катушке для приема энергии, и
модуль связи на стороне приема энергии, выполненный с возможностью обмениваться данными с устройством передачи энергии, когда транспортное средство приближается к месту для парковки, модуль управления подачей энергии задает первый режим возбуждения для катушки для передачи энергии, при котором катушка для передачи энергии возбуждается в шаблоне возбуждения, содержащем идентификационные данные,
когда первый режим возбуждения задается для катушки для передачи энергии, модуль управления приемом энергии получает идентификационные данные из шаблона возбуждения, принимаемого посредством катушки для приема энергии, и передает идентификационные данные в устройство передачи энергии,
модуль управления подачей энергии определяет то, совпадают или нет между собой идентификационные данные, содержащиеся в шаблоне возбуждения, при задании первого режима возбуждения для катушки для передачи энергии, и идентификационные данные, полученные из шаблона возбуждения, принимаемого посредством катушки для приема энергии,
если фрагменты идентификационных данных совпадают между собой, модуль управления подачей энергии задает второй режим возбуждения для катушки для передачи энергии для определения того, присутствует или нет транспортное средство в позиции выполнения процесса заряда в месте для парковки,
модуль управления приемом энергии обнаруживает энергию, принимаемую после того, как второй режим возбуждения задается для катушки для передачи энергии для того, чтобы определять то, выходит или нет транспортное средство из диапазона возбуждения катушки для передачи энергии, и
модуль управления подачей энергии разъединяет спаривание между устройством передачи энергии и устройством приема энергии, если модуль управления приемом энергии определяет то, что транспортное средство выходит из диапазона возбуждения.
5. Устройство передачи энергии, включающее в себя катушку для передачи энергии, установленную, по меньшей мере, в одном месте для парковки и выполненную с возможностью в беспроводном режиме подавать энергию в катушку для приема энергии, смонтированную на транспортном средстве, посредством возбуждения катушки для передачи энергии, когда транспортное средство останавливается в месте для парковки, причем устройство передачи энергии содержит:
датчик обнаружения приближения, выполненный с возможностью обнаруживать, когда транспортное средство приближается к месту для парковки;
модуль управления подачей энергии, выполненный с возможностью управлять током, который должен подаваться в катушку для передачи энергии; и
модуль связи, выполненный с возможностью обмениваться данными с транспортным средством, при этом:
когда транспортное средство приближается к одному из мест для парковки, модуль управления подачей энергии задает первый режим возбуждения для соответствующей катушки для передачи энергии, при котором катушка для передачи энергии возбуждается в шаблоне возбуждения, содержащем идентификационные данные,
когда модуль связи принимает идентификационные данные, передаваемые из транспортного средства, модуль управления подачей энергии определяет то, совпадают или нет между собой принятые идентификационные данные и идентификационные данные, содержащиеся в шаблоне возбуждения, при задании первого режима возбуждения для катушки для передачи энергии,
если фрагменты идентификационных данных совпадают между собой, модуль управления подачей энергии спаривает транспортное средство и одно место для парковки между собой,
модуль управления подачей энергии затем задает второй режим возбуждения для катушки для передачи энергии для определения того, присутствует или нет транспортное средство в позиции выполнения процесса заряда в одном месте для парковки, и
модуль управления подачей энергии разъединяет спаривание, если после того, как второй режим возбуждения задается для катушки для передачи энергии, обнаруживается то, что транспортное средство достигает позиции выполнения процесса заряда в одном месте для парковки, но транспортное средство затем покидает заряжаемую позицию в одном месте для парковки перед началом подачи энергии в транспортное средство.
6. Устройство передачи энергии по п. 5, в котором модуль управления подачей энергии получает данные по принимаемой энергии, передаваемые из транспортного средства, вычисляет эффективность передачи энергии из принимаемой энергии и значения команды управления подачей энергии, заданного для модуля управления подачей энергии, и определяет то, что транспортное средство присутствует в позиции выполнения процесса заряда в одном месте для парковки, когда эффективность передачи энергии превышает пороговую эффективность.
7. Устройство передачи энергии по п. 5 или 6, в котором второй режим возбуждения сильнее первого режима возбуждения.
| WO 2012086048 A1, 28.06.2012 | |||
| RU 2012102511 A, 10.09.2013 | |||
| US 2013038272 A1, 14.02.2013. |

