ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
В общем раскрытые в этой заявке варианты осуществления относятся к способам скважинного электромагнитного каротажа, а более конкретно к способу получения азимутального угла падения.
ВВОДНАЯ ИНФОРМАЦИЯ
Из предшествующего уровня техники хорошо известно использование электромагнитных измерений в скважинных условиях, например, для каротажа во время бурения (КВБ) или каротажа прибором на кабеле. Такие способы можно использовать для определения удельного сопротивления подземного пласта, которое наряду с измерениями пористости пласта часто используют для выявления присутствия углеводородов в пласте. Кроме того, азимутально чувствительные направленные измерения удельного сопротивления обычно используют, например, для управления направлением к продуктивной зоне, для получения информации, на основании которой может быть принято решение об управлении направлением, в том числе, например, для определения расстояния до удаленного пласта и направления на него. В приборах направленного каротажа удельного сопротивления часто используют наклонные или поперечные антенны (антенны, которые имеют магнитный диполь, который наклонен относительно оси прибора или поперечно направлен к ней).
Один многообещающий аспект при использовании направленных электромагнитных измерений удельного сопротивления, таких как регистрируемые прибором модели PeriScope®, скважинным прибором каротажа во время бурения, который можно получить от Schlumberger Technology Corporation, Sugar Land, Техас, заключается в получении надежного измерения азимутального угла падения между буровой скважиной и границей удаленного пласта. Способам из предшествующего уровня техники (которые описываются более подробно ниже), предназначенным для получения азимутального угла падения, могут быть присущи ограничения, заключающиеся в зашумленности сигнала и восприимчивости к свертыванию фазы. Поэтому в соответствующей области техники имеется необходимость в более робастном способе получения азимутального угла падения на основании электромагнитных измерений.
КРАТКОЕ ИЗЛОЖЕНИЕ
Раскрыт способ вычисления азимутального угла падения на основании скважинных электромагнитных измерений. Способ включает в себя регистрацию данных электромагнитных измерений в подземной буровой скважине с по меньшей мере одной измерительной группы. Данные электромагнитных измерений обрабатывают, чтобы получить коэффициенты наименьших квадратов, которые дополнительно обрабатывают, чтобы получить азимутальный угол падения.
Раскрытыми вариантами осуществления могут обеспечиваться различные технические преимущества. Например, раскрытым способом оценивания методом наименьших квадратов (вычислением азимутального угла падения на основании критерия наименьших квадратов, применяемого к зарегистрированным напряжениям) обеспечивается более точная, менее зашумленная оценка азимутального угла падения. Кроме того, исключается свертывание фазы, присущее методологии из предшествующего уровня техники.
Это краткое изложение представлено для ознакомления с выбором концепций, которые дополнительно рассмотрены ниже в подробном описании. Это краткое изложение не предназначено для идентификации ключевых или существенных признаков заявленного предмета изобретения и не предназначено для использования в качестве средства для ограничения объема заявленного предмета изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для более полного понимания раскрытого в этой заявке предмета изобретения и преимуществ его теперь будет сделано обращение к нижеследующему описанию в сочетании с сопровождающими чертежами, на которых:
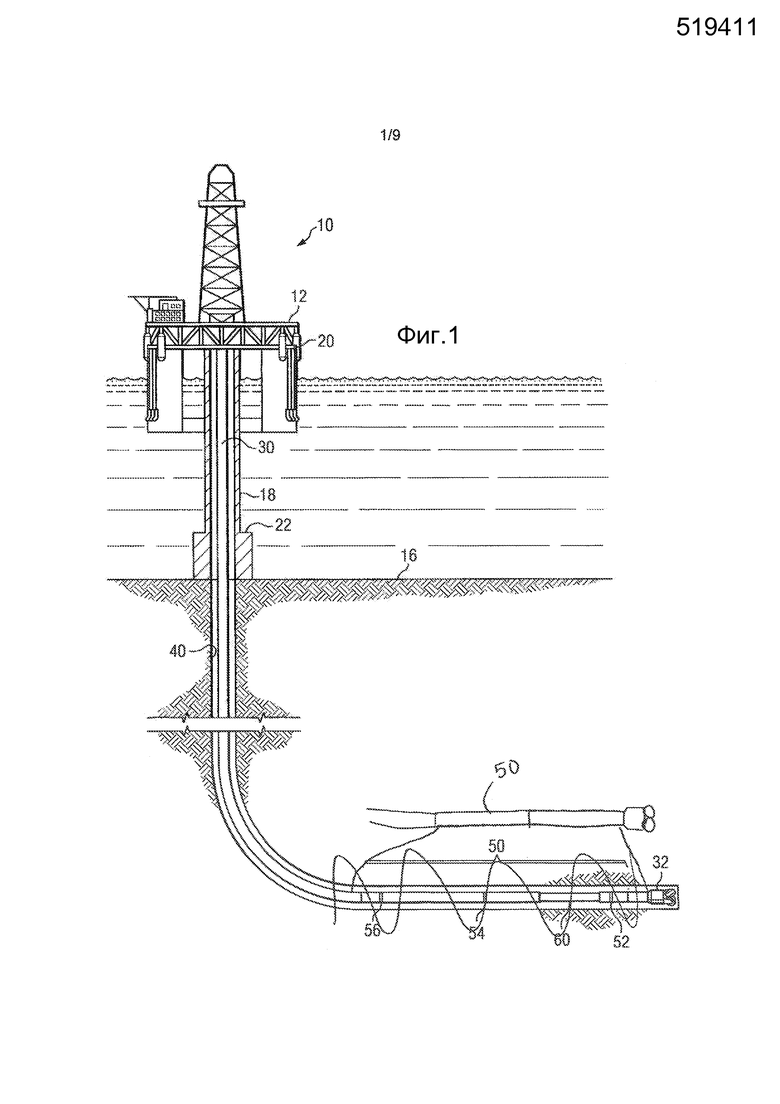
фиг. 1 - вид буровой установки согласно одному примеру, в которой можно использовать приборы электромагнитного каротажа;
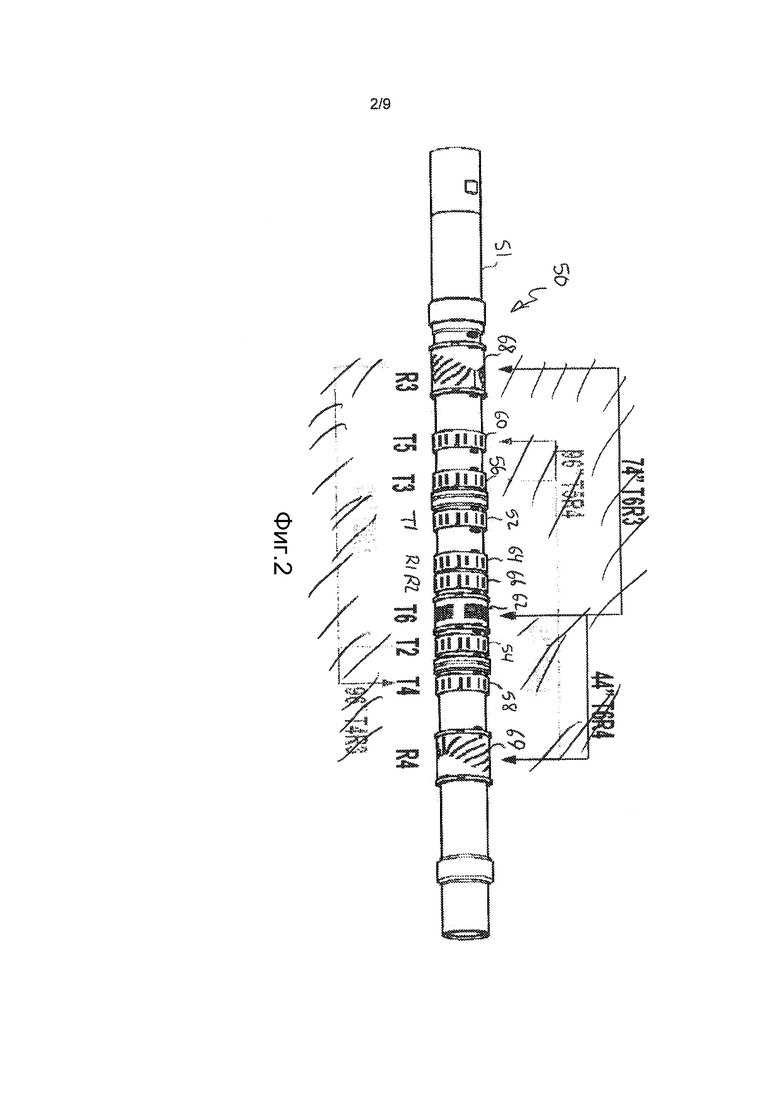
фиг. 2 - вид прибора электромагнитного каротажа из фиг. 1 согласно одному примеру;
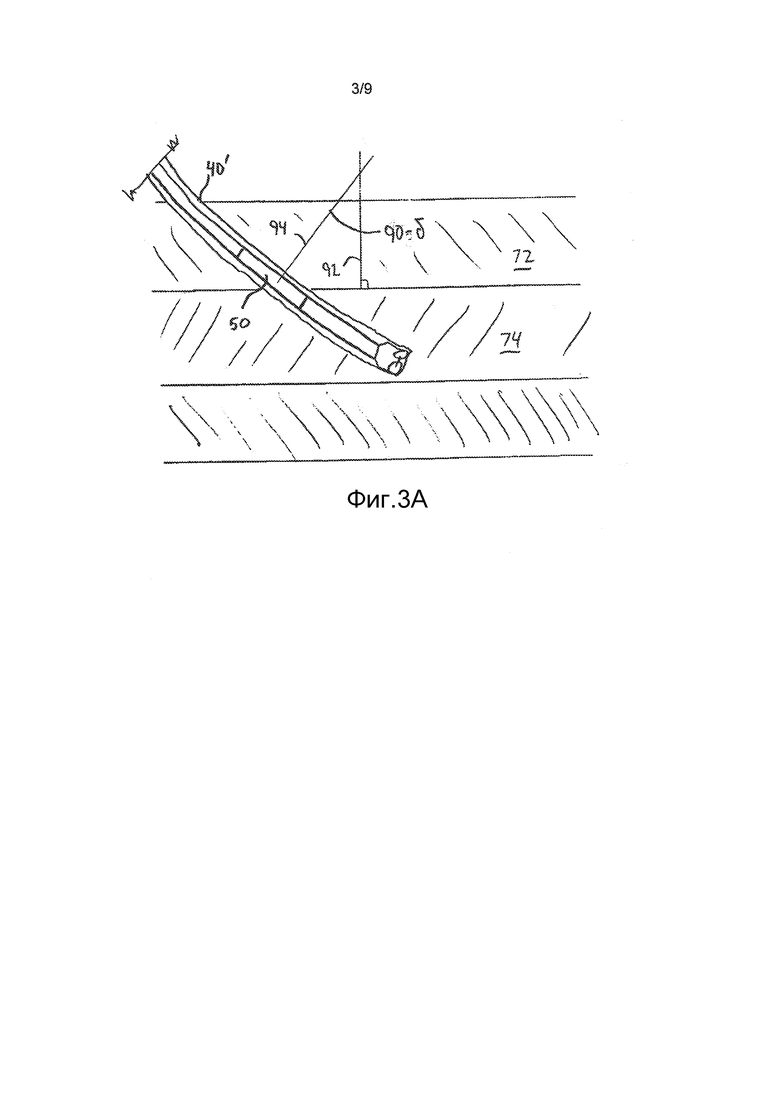
фиг. 3А - схематический вид прибора электромагнитного каротажа, размещенного в подземной буровой скважине;
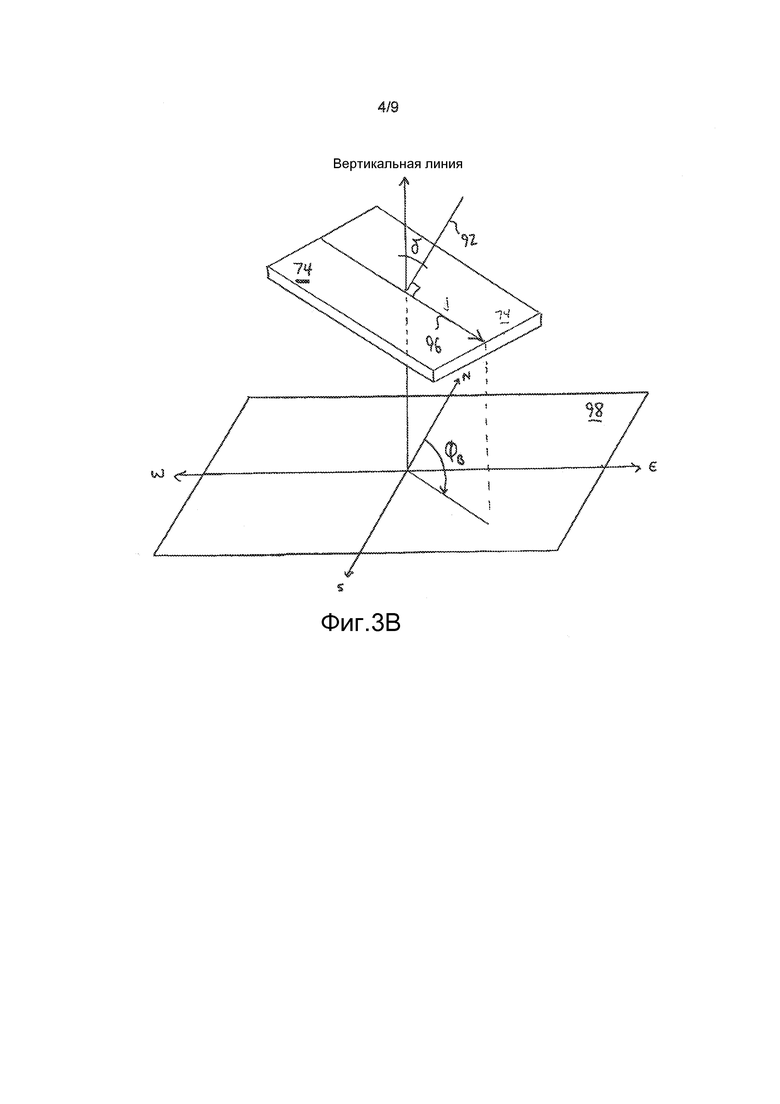
фиг. 3В - схематический вид приподнятой плоскости напластования, предназначенный для показа определения азимутального угла падения;
фиг. 4 - блок-схема последовательности действий раскрытого способа согласно одному варианту осуществления; и
фиг. 5А, 5В, 5С, 5D и 5Е - диаграммы электромагнитного каротажа, полученные в течение экспериментальной проверки, при которой варианты осуществления раскрытого способа использовались для получения азимутальных углов падения во время бурения.
ПОДРОБНОЕ ОПИСАНИЕ
На фиг. 1 показана для примера буровая установка 10, пригодная для применения различных вариантов осуществления способа, раскрытого в этой заявке. Полупогружная буровая платформа 12 установлена над нефтегазовым пластом (непоказанным), расположенным ниже морского дна 16. Подводная труба 18 продолжается от палубы 20 платформы 12 до оборудования 22 устья скважины. Платформа может включать в себя буровую вышку и подъемный механизм для подъема и спуска бурильной колонны 30, которая, как показано, продолжается в буровую скважину 40 и включает в себя буровое долото 32, размещенное на нижнем конце компоновки низа бурильной колонны (КНБК), которая также включает в себя прибор 50 для электромагнитных измерений (такой как PeriScope®), пригодный для выполнения измерений при скважинном электромагнитном каротаже.
Следует понимать, что размещение, показанное на фиг. 1, представлено только для примера. Бурильная колонна 30 может включать в себя по существу любые подходящие скважинные приборные компоненты, в том числе, например, отклоняющий инструмент, такой как отклоняющий инструмент для роторного бурения, скважинную телеметрическую систему и один или несколько приборов для измерений в процессе бурения или каротажа во время бурения, включающих в себя различные датчики для измерения в скважине характеристик буровой скважины и окружающего пласта. Раскрываемые варианты осуществления не подразумеваются ограниченными какой-либо конкретной конфигурацией бурильной колонны.
Также следует понимать, что раскрываемые варианты осуществления не ограничены применением в пределах полупогружной платформы 12, показанной на фиг. 1. Раскрываемые варианты осуществления с таким же успехом пригодны к применению при выполнении подземных работ на суше или в море. Кроме того, следует понимать, что термины «буровая скважина» и «ствол скважины» используются в этой заявке на равных основаниях.
На фиг. 2 показан в качестве одного примера прибор 50 для электромагнитных измерений. В показанном варианте осуществления измерительный прибор 50 включает в себя прибор направленного каротажа во время бурения с большим радиусом исследования, включающий в себя многочисленные излучатели Т1, Т2, Т3, Т4, Т5 и Т6, обозначенные позициями 52, 54, 56, 58, 60 и 62, многочисленные приемники R1, R2, R3 и R4, обозначенные позициями 64, 66, 68 и 69, разнесенные в осевом направлении вдоль корпуса 51 прибора. В показанном примере измерительный прибор 50 включает в себя осевые, поперечные и наклонные антенны. Осевая антенна, показанная, например, позицией 54, представляет собой антенну, дипольный момент которой по существу параллелен продольной оси прибора. Осевые антенны обычно намотаны по окружности каротажного прибора, так что плоскость антенны ортогональна к оси прибора. Осевые антенны создают диаграмму направленности излучения, которая эквивалентна диполю, вдоль оси прибора (обычно в направлении z). Поперечная антенна, показанная, например, позицией 62, представляет собой антенну, дипольный момент которой по существу перпендикулярен к продольной оси прибора. Поперечная антенна может включать в себя седлообразную рамку (например, раскрытую в публикациях 2011/0074427 и 2011/0238312 патентов США) и создает диаграмму направленности излучения, которая эквивалентна диполю, который перпендикулярен к оси прибора (обычно в направлении x или y). Наклонная антенна, показанная, например, позицией 68, представляет собой антенну, дипольный момент которой не параллелен и не перпендикулярен к продольной оси прибора. Наклонные антенны хорошо известны в соответствующей области техники и обычно создают диаграмму направленности излучения смешанной формы (то есть диаграмму направленности излучения, дипольный момент которой не параллелен и не перпендикулярен к оси прибора).
В конкретном варианте осуществления, показанном на фиг. 2, пять излучающих антенн (Т1, Т2, Т3, Т4 и Т5) представляют собой осевые антенны, разнесенные вдоль оси прибора. Шестая излучающая антенна (Т6) представляет собой поперечную антенну. Первый и второй приемники (R1 и R2), расположенные вдоль оси между излучателями, представляют собой осевые антенны и могут использоваться при выполнении обычных измерений удельного сопротивления по распространению электромагнитных волн. Третий и четвертый приемники (R3 и R4) представляют собой наклонные антенны, расположенные вдоль оси по разные стороны от излучателей. Такая направленная компоновка (включающая в себя наклонные и/или поперечные антенны) обеспечивает предпочтительную чувствительность с одной азимутальной стороны прибора 50, которая позволяет обнаруживать и идентифицировать границы пластов и другие особенности подземных пластов.
Следует понимать, что варианты осуществления способа, раскрытого в этой заявке, не ограничены какой-либо конкретной конфигурацией прибора электромагнитного каротажа. Изображение на фиг. 2 представляет собой только один пример подходящего прибора электромагнитного каротажа. Другие конфигурации также можно использовать. Например, в публикации 2011/0133740 патента США (которая полностью включена в эту заявку путем ссылки) раскрыта модульная конфигурация прибора электромагнитного каротажа, который можно использовать для получения данных направленного каротажа удельного сопротивления с большим радиусом исследования. В таких модульных конструкциях излучающие и приемные антенны можно помещать на различные места в компоновку низа бурильной колонны или на места в бурильной колонне выше компоновки низа бурильной колонны. Количество и конфигурацию излучателей и приемников, размещаемых в компоновке низа бурильной колонны, а также осевое расстояние между различными модулями можно выбирать на основании свойств подземных пластов.
На фиг. 3А представлено схематическое изображение, на котором показана компоновка низа бурильной колонны, включающая в себя прибор 50 для электромагнитных измерений, размещенный в подземной буровой скважине 40'. В показанном варианте осуществления буровая скважина 40' пересекает некоторое количество пластов (например, пласты 72 и 74) при кажущемся угле падения (дополнение кажущегося угла 90-δ падения показано на фиг. 3А). Можно понять, что кажущийся угол падения является углом между двумя направлениями, направлением, нормальным к границе (или пласту), показанным позицией 92, и направлением на устье скважины (направлением, противоположным направлению вектора ускорения силы тяжести, спроецированного на плоскость поперечного сечения прибора для электромагнитных измерений), показанным позицией 94, и поэтому характеризует угловую зависимость между осью прибора (или осью буровой скважины) и плоскостью границы пласта (например, границы раздела между пластами 72 и 74).
Азимутальный угол падения (который также можно назвать кажущимся азимутальным углом падения) является пеленгом пласта и определяет азимутальный угол кажущегося падения (то есть направление наклона или падения относительно опорного направления, такого как магнитный север). Кроме того, под азимутальным углом падения можно понимать угол, под которым должен вращаться бурильный инструмент, чтобы ось x (в заданном направлении, поперечном оси прибора) была ориентирована в направлении вектора падения (направлении максимального наклона). Азимутальный угол ϕB падения показан на фиг. 3В как угол между направлением на север и проекцией вектора 96 падения на горизонтальную плоскость 98. Угол δ падения также показан на фиг. 3В.
При подведении изменяющегося во времени электрического тока (переменного тока) к одной из излучающих антенн (например, Т1, Т2, Т3, Т4, Т5 или Т6) в пласте образуется соответствующее изменяющееся во времени магнитное поле. В свою очередь магнитное поле наводит электрические токи (вихревые токи) в проводящем пласте. Эти вихревые токи также образуют вторичные магнитные поля, которые могут создавать сигнал напряжения на одной или нескольких приемных антеннах (например, на приемных антеннах R1, R2, R3 и R4). Как известно специалистам в соответствующей области техники, результаты измерений напряжения на одной или нескольких приемных антеннах можно обработать, чтобы получить одно или несколько измерений вторичного магнитного поля, которые в свою очередь также можно обработать, чтобы оценить различные свойства пласта (например, удельное сопротивление (удельную проводимость), анизотропию удельного сопротивления, расстояние до удаленного пласта, кажущийся угол падения и/или азимутальный угол падения.
В предшествующем уровне техники имеются различные способы вычисления азимутального угла падения. Например, азимутальный угол падения можно оценить следующим образом. Напряжение, измеряемое на наклонном приемнике, изменяется как функция азимута датчика (то есть переднего угла прибора), например, в соответствии с уравнением (1).
V(f,t,r)=a0+a1cosϕ+b1sinϕ+a2cos2ϕ+b2sin2ϕ, 
где V(f,t,r) обозначает напряжение на наклонном приемнике для конкретного сочетания (f,t,r) частоты, излучателя и приемника, ϕ обозначает передний угол прибора и а0, а1, а2, b1 и b2 обозначают комплексные коэффициенты подбора («комплексные» означает, что каждый из коэффициентов подбора включает в себя действительную и мнимую составляющие). Следует понимать, что хотя это не показано в явной форме в уравнении (1), комплексные коэффициенты а0, а1, а2, b1 и b2 подбора также являются функциями сочетания (f,t,r) частоты, излучателя и приемника. Путем подбора зависящего от азимута (переднего угла прибора) скважинного сигнала к ряду Фурье комплексные коэффициенты подбора напряжения для каждой пары излучатель-приемник (измерительной группе) могут быть найдены при вращении прибора. Затем эти комплексные коэффициенты подбора можно использовать для вычисления значений фазового сдвига и затухания, а также азимутального угла падения (также называемого в соответствующей области техники углом ориентации напластования).
Азимутальный угол падения можно оценивать по действительной и мнимой составляющим напряжения V, определенного в уравнении (1). Например, математически это можно представить в следующем виде:
где real(·) и imag(·) обозначают действительную и мнимую составляющие показанных аргументов и ϕB обозначает азимутальный угол падения (при этом ϕB RE обозначает действительную составляющую азимутального угла падения и ϕB IM обозначает мнимую составляющую азимутального угла падения.
Поскольку действительная и мнимая составляющие азимутального угла падения необязательно равны (а часто не равны), взвешенное среднее этих оценок углов можно использовать для получения азимутального угла падения с использованием способов из предшествующего уровня техники. Азимутальный угол падения можно вычислить при использовании взвешенного усреднения индивидуальных углов для каждой из используемых пар излучатель-приемник на каждой частоте измерений, и его можно представить математически, например, в следующем виде:
где ϕi(f,t,r) обозначает азимутальный угол падения, вычисляемый для каждой пары излучатель-приемник на каждой представляющей интерес частоте, и RE и IM обозначают действительную и мнимую составляющие различных комплексных коэффициентов, определенных в уравнении (1). Угол прибора относительно расслоенности можно определить путем усреднения индивидуальных углов для каждой пары излучатель-приемник при использовании одинакового интервала между парами симметризованных направленных измерений.
Следует понимать, что особое внимание часто необходимо уделять исключению эффектов свертывания фазы при усреднениях (вследствие многочисленных вычислений арктангенса). Кроме того, особое внимание может требоваться при определении функций арктангенса. Поскольку функция арктангенса является нелинейной, этим способом усреднения может вноситься статистическая систематическая ошибка. Кроме того, как описывается более подробно ниже с обращением к фигурам с 5А по 5Е, для азимутальных углов падения, вычисляемых с использованием способа из предшествующего уровня техники, характерна зашумленность. Следовательно, необходим улучшенный способ получения азимутального угла падения.
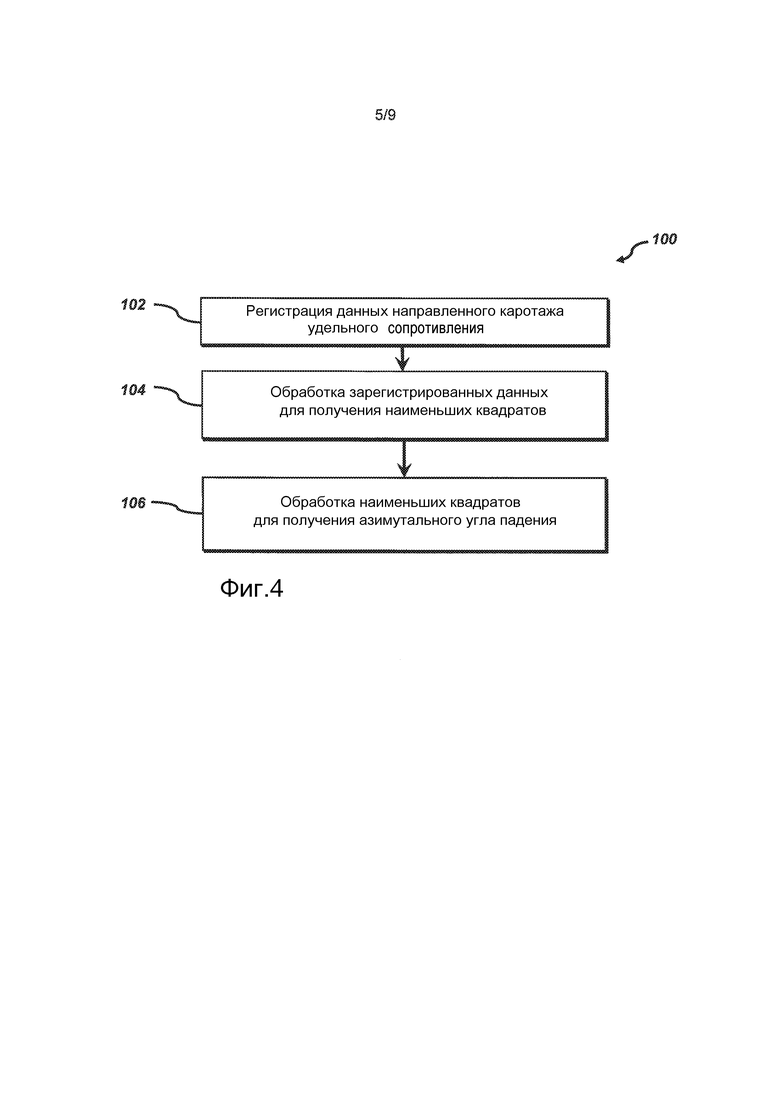
На фиг. 4 показана блок-схема последовательности действий раскрываемого способа 100 согласно одному варианту осуществления. Бурильную колонну, включающую в себя прибор для электромагнитных измерений (например, показанный на фиг. 1, 2 и 3), размещают в стволе подземной скважины. На этапе 102 данные направленного каротажа удельного сопротивления регистрируют в представляющей интерес области (например, в предварительно выбранной области ствола скважины, в которой желательно оценить азимутальный угол падения). Регистрируемые данные могут включать в себя данные датчиков из по меньшей мере одной измерительной группы (то есть из излучателя, имеющего по меньшей мере одну излучающую антенну, находящуюся на расстоянии от приемника, имеющего по меньшей мере одну приемную антенну). Измерительная группа может включать в себя по существу любые подходящие излучающую и приемную антенны, которые образуют перекрестную составляющую.
Регистрируемые данные могут включать в себя по меньшей мере одну из перекрестных составляющих (например, Vxz или Vzx) в тензоре напряжения. Например, при использовании направленных компоновок излучателя и приемника регистрируемые данные могут включать в себя перекрестные составляющие из следующего тензора напряжения:
где первый индекс (x, y или z) относится к излучающему диполю и второй индекс относится к приемному диполю. По определению индексы x и y относятся к поперечным моментам, тогда как индекс z относится к осевому моменту. Конечно, раскрытые варианты осуществления не ограничены никакими конкретными условиями. Они не ограничены использованием чисто осевых или чисто поперечных излучающих и/или приемных антенн. Фактически, в отдельных вариантах осуществления, описываемых более подробно ниже, используются одна или несколько наклонных излучающих или приемных антенн. В таких вариантах осуществления напряжения, измеряемые на приемной антенне, включают в себя непосредственные и перекрестные составляющие.
Кроме того, регистрируемые данные могут включать в себя различные измерения, которые получают на основании связей между антеннами. Эти измерения могут включать в себя, например, симметризованные направленные измерения амплитуды и фазы (USDA и USDP), антисимметризованные направленные измерения амплитуды и фазы (UADA и UADP), измерения удельного сопротивления по амплитуде и фазе гармоники (UHRA и UHRP) и измерения анизотропии по амплитуде и фазе гармоники (UHAA и UHAP). Эти параметры известны специалистам в соответствующей области техники и могут быть получены на основании связей между антеннами, например, в следующем виде:
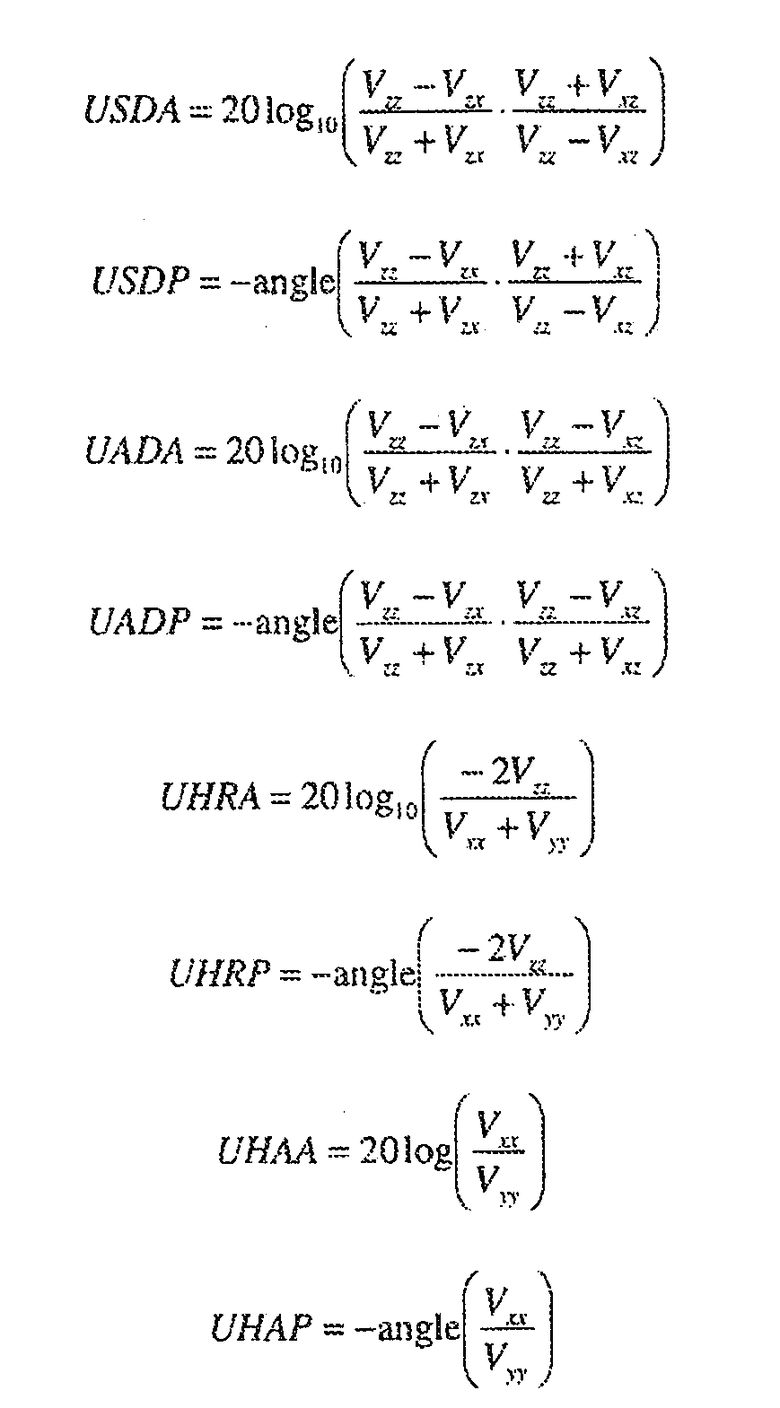
Приведенный выше перечень ни в коем случае не является исчерпывающим. Конечно, на этапе 102 можно регистрировать другие производные параметры.
Что касается далее фиг. 4, то измерения напряжения могут быть обработаны (например, скважинным процессором) для получения наименьших квадратов на этапе 104, которые в свою очередь дополнительно обрабатывают в сочетании с различными комплексными коэффициентами соответствия на этапе 106, чтобы получить азимутальный угол падения. Такую обработку можно выполнять, например, в соответствии со следующими математическими уравнениями. Принимаемое напряжение периодически изменяется в зависимости от переднего угла прибора, когда прибор для электромагнитных измерений поворачивают в буровой скважине, например, следующим образом:
Vn=bncosϕ+cnsinϕ, 
где Vn обозначает напряжение на наклонном приемнике в конкретной паре излучатель-приемник и при измерении n (то есть при конкретном измерении), ϕ обозначает передний угол прибора, а bn и cn определены ниже при использовании комплексных коэффициентов подбора из уравнения (1):
Следует понимать что уравнение (4) представляет собой периодическое уравнение первого порядка, описывающее периодическое колебание напряжение приемника при вращении прибора. Кроме того, можно использовать уравнение, включающее в себя члены более высокого порядка (например, включающее в себя члены второго порядка, определенные в приведенном выше уравнении (1)). Раскрытые варианты осуществления не ограничены в этом отношении.
Обработка на этапе 104 может включать в себя вычисление взвешенной суммы возведенных в квадрат невязок L при одном или нескольких измерениях n напряжения, например, указанной ниже:

где wn обозначает статистические веса, присваиваемые каждому измерению напряжения (то есть каждому n для конкретного сочетания частоты, излучателя, приемника). Угловую зависимость L можно упростить разложением, указанным ниже:

и ее можно дополнительно привести к:

где
Действительные числа Q и R можно выразить, например, в следующем виде:
Q=Scos2α,
R=Ssin2α,
где
Таким образом, L можно выразить в членах P, S и α следующим образом:
L=P+Scos2(ϕ-α). 
Нетрудно понять, что значение L достигает максимального значения P+S, когда ϕ=αmodπ, и что значение L достигает минимального значения P-S, когда ϕ=(α+π/2)modπ. Кроме того, сравнение уравнения (8) с уравнением (2), приведенным выше, показывает, что α в уравнении (8) обозначает оценку наименьших квадратов азимутального угла ϕB падения. Поэтому обработка на этапе 104 также включает в себя вычисление коэффициентов P, Q, R и S и вычисление азимутального угла α падения, например, с использованием уравнения (8).
Как описывается более подробно ниже, такое оценивание методом наименьших квадратов (определение азимутального угла падения путем минимизации взвешенной суммы возведенных в квадрат невязок регистрируемых напряжений) обеспечивает более точную, менее зашумленную оценку азимутального угла падения. Кроме того, функцию арктангенса вычисляют только один раз в конце процесса, в результате чего исключается свертывание фазы.
Контроль качества каротажа можно реализовывать, например, путем вычисления доверительного интервала (например, планок погрешностей) для получаемого азимутального угла падения. В уравнении (7) Q и R можно трактовать как взвешенное среднее 
В таком случае верхний и нижний пределы доверительного интервала азимутального угла падения можно вычислять, например, следующим образом:
errhi=α+abs(Δα),
errlo=α-abs(Δα). 
Значения errlo и errhi обозначают нижний и верхний пределы доверительного интервала. Как должно быть понятно специалистам в соответствующей области техники, чем меньше интервал (чем ближе значения errlo и errhi друг к другу), тем выше определенность вычисляемого азимутального угла падения.
Следует понимать, что методологию оценивания методом наименьших квадратов, описанную выше, можно применять к по существу любым электромагнитным каротажным измерениям, чтобы получать азимутальный угол падения. Например, электромагнитные измерения можно выполнять на по существу любой подходящей частоте электромагнитного излучения (например, 100, 400 и/или 2000 кГц). Кроме того, при электромагнитных измерениях можно использовать по существу любые подходящие перекрестные составляющие излучателя и приемника, образующиеся при использовании по существу любой подходящей измерительной группы. Например, азимутальный угол падения можно вычислять при использовании измерений, выполняемых с помощью осевого излучателя и наклонного и/или поперечного приемника, поперечного излучателя и осевого и/или наклонного приемника, и/или наклонного излучателя и осевого приемника. Кроме того, излучатель и приемник в измерительной группе могут быть расположены в осевом направлении на корпусе прибора для электромагнитных измерений или в компоновке низа бурильной колонны на по существу любом подходящем расстоянии друг от друга. Раскрытые варианты осуществления намеренно не ограничены в этом отношении.
Следует понимать, что раскрытая методология в равной мере применима к электрическим дипольным антеннам, например, к электрическому дипольному излучателю, связанному с приемником с дисковым электродом.
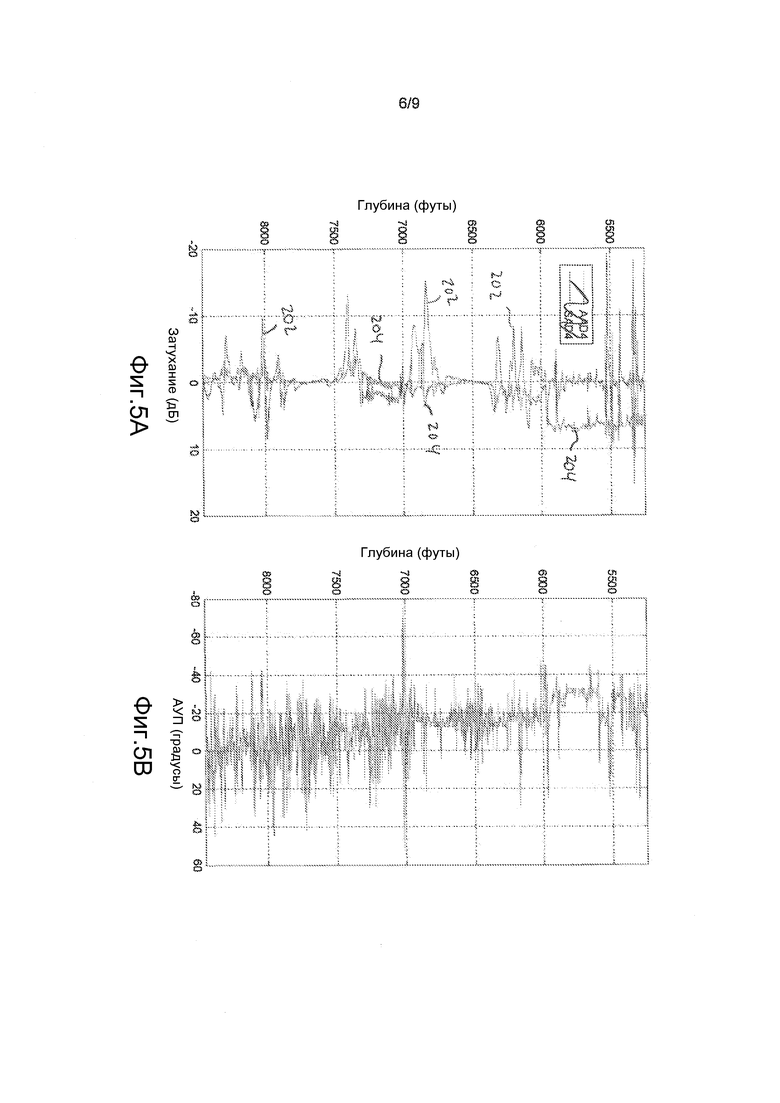
Теперь раскрытые варианты осуществления будут описаны более подробно с обращением к нижеследующим, не создающим ограничений примерам на фигурах 5А, 5В, 5С, 5D и 5Е. На фиг. 5А показано графическое изображение каротажной диаграммы затухания электромагнитной волны в зависимости от глубины буровой скважины. Две кривые графически представляют симметризованные 202 и антисимметризованные 204 значения затухания в зависимости от глубины.
На фиг. 5В показана 212 кривая азимутального угла падения (АУП) в зависимости от глубины буровой скважины. Азимутальный угол падения был получен на основании электромагнитных измерений при использовании методологии из предшествующего уровня техники, описанной выше со ссылкой на уравнения с (1) по (3). Заметно, что вычисленное значение азимута падения, полученное с использованием методологии из предшествующего уровня техники, зашумлено, особенно на глубинах в диапазоне от около 7000 до около 8500 футов (от около 2134 до около 2591 м). В этом диапазоне глубин буровой скважины угол падения изменяется от около -40 до около 40°.
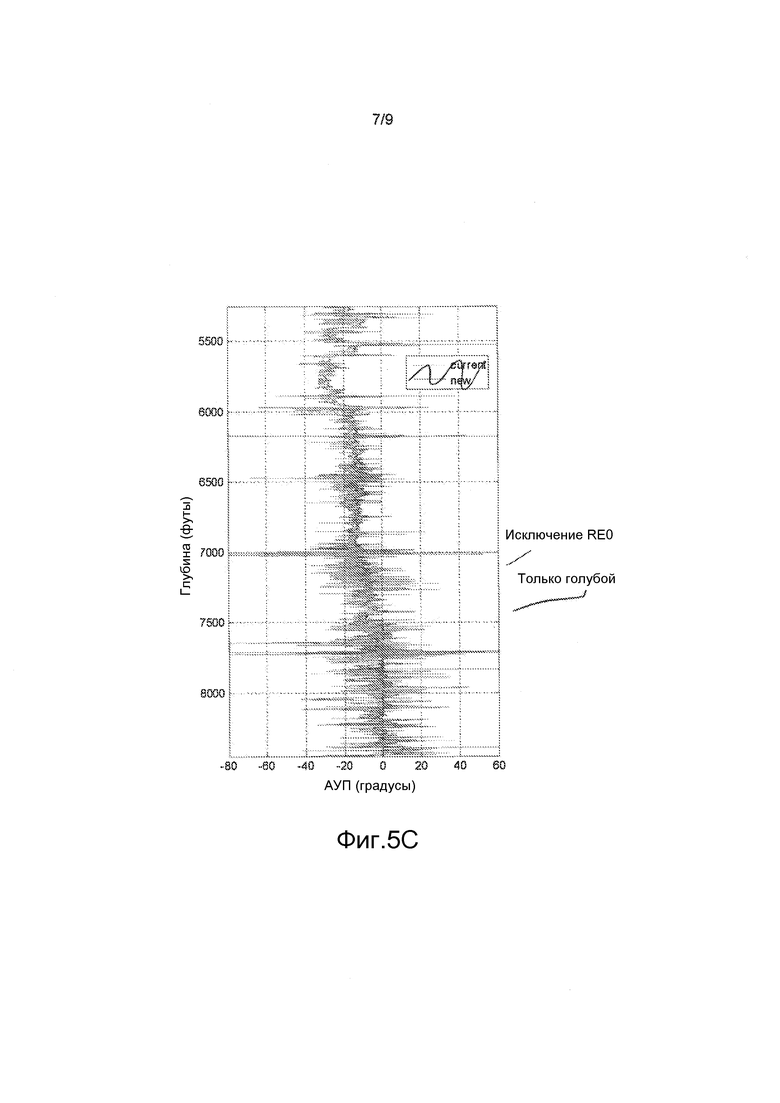
На фиг. 5С показана кривая 222 азимутального угла падения (АУП) в зависимости от глубины буровой скважины. Кривая азимутального угла падения на фиг. 5С была получена на основании электромагнитных измерений при использовании раскрытой методологии, описанной выше с обращением к фиг. 4 и уравнениям с (4) по (8). Как нетрудно понять при сравнении фиг. 5В и 5С, азимутальный угол падения, полученный при использовании раскрытой методологии наименьших квадратов, значительно более стабилен, при этом шум на некоторых глубинах находится в пределах меньше ±2°.
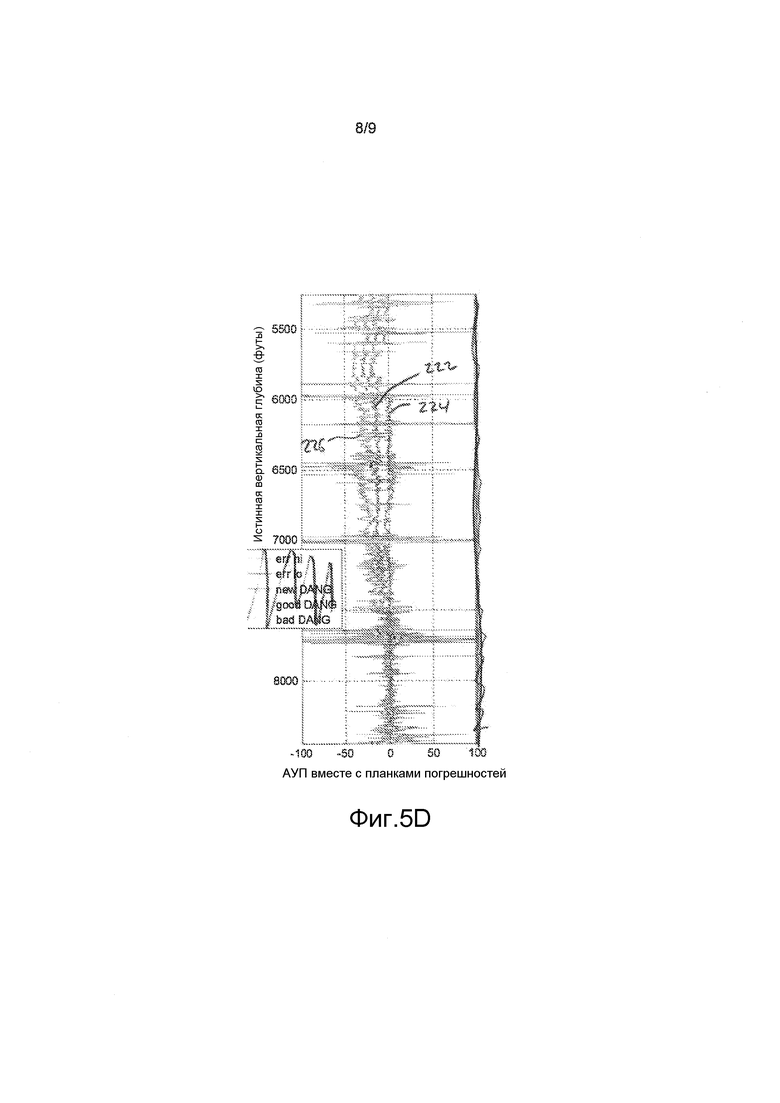
На фиг. 5D показана кривая 222 азимутального угла падения в зависимости от глубины буровой скважины вместе с верхней 224 и нижней 226 планками погрешностей. При большей глубине буровой скважины (при глубинах больше чем около 7500 футов (2286 м)) три кривые 222, 224 и 226 по существу совмещаются друг с другом, что указывает на высокую степень точности полученного азимутального угла падения (узкий доверительный интервал). При меньших глубинах (например, при глубинах меньше чем около 7000 футов (2134 м)) размах возрастает до около 30°, что указывает на более высокую неопределенность в этой области, хотя все же значительно меньшую, чем в случае шума, показанного на фиг. 5В, при контроле в соответствии с методологией из предшествующего уровня техники.
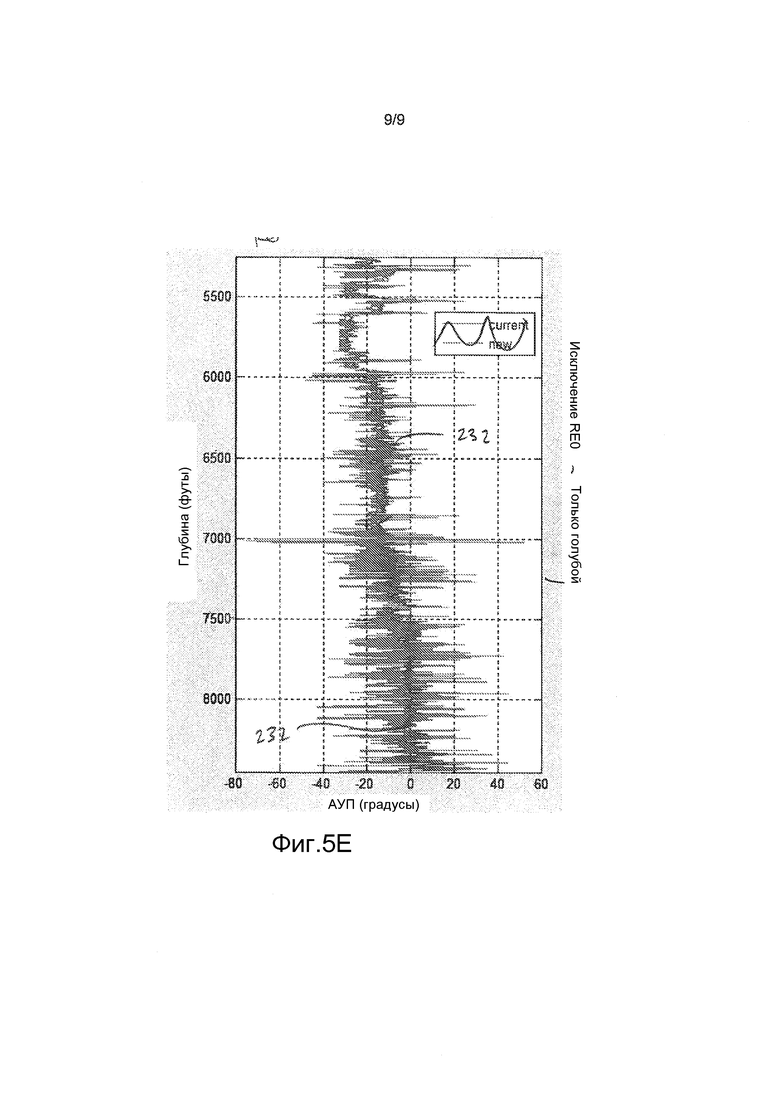
На фиг. 5Е опять показана кривая 232 азимутального угла падения в зависимости от глубины буровой скважины. На фиг. 5С кривая азимутального угла падения, вычисленная при использовании раскрытой методологии, содержит небольшое число больших выбросов (например, при позиции 234) не имеющих смысла значений (вследствие высокой неопределенности на этих конкретных глубинах. Эти выбросы отсутствуют на фиг. 5Е. Заметим, что на остальной части каротажной диаграммы имеются стабильные точные значения азимута падения при шуме, обычно находящиеся в пределах меньше ±5°.
Следует понимать, что электромагнитные способы получения азимутального угла падения обычно реализуют с помощью электронного процессора (например, с помощью процессора компьютера или микроконтроллера, специализированной интегральной схемы, вентильной матрицы, программируемой пользователем, системы на кристалле и т.д.). В частности, из числа описанных функций, способов и/или этапов, которые могут быть выполнены в соответствии с раскрытыми вариантами осуществления, любая из этих функций и/или все эти функции могут быть выполнены с использованием автоматизированного или компьютеризированного процесса. Как должно быть понятно специалистам в соответствующей области техники, системы, способы и процедуры, описанные в этой заявке, могут быть реализованы программируемым компьютером, выполняемым компьютером программным обеспечением или цифровыми схемами. Программное обеспечения можно сохранять на считываемых компьютером носителях, таких как нетранзиторные, считываемые компьютером носители. Например, считываемые компьютером носители могут включать в себя дискету, оперативное запоминающее устройство, постоянное запоминающее устройство, жесткий диск, съемные носители, флэш-память, карту памяти, оптические носители, магнитооптические носители, компакт-диск, доступный только для чтения и т.д. Цифровые схемы могут включать в себя интегральные схемы, вентильные матрицы, стандартный блок логики, вентильную матрицу, программируемую пользователем (FPGA) и т.п. Раскрытые варианты осуществления ни в коей мере не ограничены никакими конкретными аппаратными средствами компьютера и/или конфигурацией программного обеспечения.
Согласно некоторым вариантам осуществления предпочтительно реализовывать раскрытую методологию вычисления азимутального угла падения на скважинном процессоре. Под скважинным процессором имеется в виду электронный процессор (например, микропроцессор или цифровой контроллер), размещенный в бурильной колонне (например, в приборе электромагнитного каротажа или же в компоновке низа бурильной колонны). Согласно таким вариантам осуществления вычисленные азимутальный углы падения можно сохранять в скважинном запоминающем устройстве и/или передавать на поверхность в процессе бурения известными способами телеметрии (например, телеметрии по гидроимпульсному каналу связи или по проводу в бурильной трубе). В случае передачи на поверхность азимутальные углы падения можно дополнительно обрабатывать, чтобы получать направления последующего бурения или последующего регулирования отклоняющего инструмента при геонавигации. Согласно альтернативным вариантам осуществления азимутальные углы падения можно вычислять на поверхности при использовании наземного процессора (наземного компьютера) и данных электромагнитных измерений, сохраняемых в запоминающем устройстве прибора, или путем обработки исходных напряжений и/или коэффициентов подбора, передаваемых на поверхность во время операции бурения. Раскрытый предмет изобретения не ограничен в этом отношении.
Хотя электромагнитный способ получения азимутального угла падения и некоторые преимущества его описаны подробно, следует понимать, что различные изменения, подстановки и варианты могут быть сделаны без отступления от сущности и объема раскрытия, определяемого прилагаемой формулой изобретения.
Изобретение относится к скважинному электромагнитному каротажу. Сущность: способ включает регистрацию данных электромагнитных измерений в подземной буровой скважине с по меньшей мере одной измерительной группы. Данные электромагнитных измерений обрабатывают, чтобы получить коэффициенты наименьших квадратов. Обрабатывают коэффициенты наименьших квадратов, чтобы получить азимутальный угол падения. Технический результат: более точная, менее зашумленная оценка угла падения, исключение свертывания фазы. 2 н. и 18 з.п. ф-лы, 10 ил.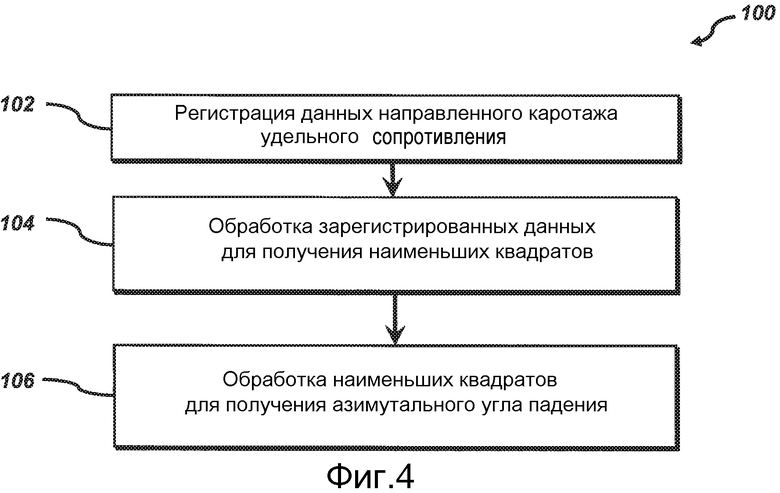
1. Способ определения азимутального угла падения на основании скважинных электромагнитных измерений, содержащий этапы, на которых:
(а) регистрируют данные электромагнитных измерений в подземной буровой скважине с по меньшей мере одной измерительной группы;
(b) побуждают процессор к обработке данных электромагнитных измерений, зарегистрированных на этапе (а), чтобы получить коэффициенты наименьших квадратов; и
(с) побуждают процессор к обработке коэффициентов наименьших квадратов, чтобы получить азимутальный угол падения.
2. Способ по п. 1, в котором данные электромагнитных измерений регистрируют на этапе (а), используя измерительную группу, имеющую наклонную приемную антенну.
3. Способ по п. 1, в котором данные электромагнитных измерений регистрируют на этапе (а), используя измерительную группу, имеющую осевую или поперечную излучающую антенну.
4. Способ по п. 1, в котором данные электромагнитных измерений, зарегистрированные на этапе (а), содержат множество измерений напряжения, зарегистрированных на соответствующем множестве измерительных групп.
5. Способ по п. 4, в котором азимутальный угол падения получают путем минимизации взвешенного среднего квадратов множества измерений напряжения.
6. Способ по п. 5, в котором взвешенную сумму наименьших квадратов возведенных в квадрат невязок вычисляют в соответствии со следующим уравнением:
где L обозначает взвешенную сумму возведенных в квадрат невязок, Vn обозначает множество измерений n напряжения и wn обозначает статистические веса, присваиваемые каждому из множества измерений n напряжения.
7. Способ по п. 6, в котором процессор обрабатывает взвешенную сумму наименьших квадратов возведенных в квадрат
невязок и множество комплексных коэффициентов подбора сигнала напряжения, зарегистрированного на этапе (а), чтобы получить азимутальный угол падения на этапе (с).
8. Способ по п. 7, в котором азимутальный угол падения вычисляют на этапе (с) в соответствии со следующим уравнением:
L=P+Scos2(ϕ-α),
где L обозначает взвешенную сумму возведенных в квадрат невязок, α обозначает азимутальный угол наклона, ϕ обозначает передний угол прибора, а P и S обозначают взвешенные средние комплексных коэффициентов подбора.
9. Способ по п. 8, в котором взвешенные средние P и S комплексных коэффициентов подбора вычисляют в соответствии со следующими уравнениями:
где
и где wn обозначает статистические веса, присваиваемые каждому из множества измерений n напряжения, зарегистрированных на этапе (а), а bn и cn обозначают комплексные коэффициенты подбора для каждого из множества измерений напряжения.
10. Способ по п. 1, в котором азимутальный угол падения вычисляют в соответствии со следующим уравнением:

где α обозначает азимутальный угол падения, а Q и R обозначают коэффициенты наименьших квадратов множества измерений напряжения, полученных на этапе (а).
11. Способ по п. 1, дополнительно содержащий:
(d) побуждение процессора к вычислению доверительного интервала для азимутального угла падения, полученного на этапе
(с).
12. Способ по п. 11, в котором доверительный интервал вычисляют в соответствии со следующим уравнением:
где 2∆α обозначает доверительный интервал, R и Q обозначают коэффициенты наименьших квадратов множества измерений напряжения, полученных на этапе (а), ∆R и ∆Q обозначают стандартные отклонения R и Q.
13. Способ по п. 12, в котором верхний и нижний пределы доверительного интервала вычисляют в соответствии со следующими уравнениями:
errhi=α+abs(∆α),
errlo=α-abs(∆α),
где errhi и errlo обозначают верхний и нижний пределы доверительного интервала и α обозначает азимутальный угол падения, полученный на этапе (с).
14. Способ по п. 1, в котором указанную обработку на этапах (b) и (с) выполняют, используя скважинный процессор.
15. Способ по п. 14, дополнительно содержащий:
(d) передачу полученного азимутального угла падения в наземный пункт.
16. Способ по п. 15, дополнительно содержащий:
(е) дополнительную обработку азимутального угла падения в наземном пункте для получения направления последующего бурения подземной буровой скважины.
17. Каротажный прибор, содержащий:
по меньшей мере одну измерительную группу для регистрации данных электромагнитных измерений в подземной буровой скважине; и
процессор для обработки данных электромагнитных измерений, чтобы получать коэффициенты наименьших квадратов для определения азимутального угла падения.
18. Каротажный прибор по п. 17, в котором данные электромагнитных измерений содержат множество измерений
напряжения, зарегистрированных по меньшей мере одной измерительной группой, а азимутальный угол наклона определяется путем минимизации взвешенного среднего квадратов множества измерений напряжения.
19. Каротажный прибор по п. 18, в котором взвешенная сумма наименьших квадратов возведенных в квадрат невязок вычисляется в соответствии со следующим уравнением:
где L обозначает взвешенную сумму возведенных в квадрат невязок, Vn обозначает множество измерений n напряжения и wn обозначает статистические веса, присваиваемые каждому из множества измерений n напряжения.
20. Каротажный прибор по п. 19, в котором процессор обрабатывает взвешенную сумму наименьших квадратов возведенных в квадрат невязок и множество комплексных коэффициентов подбора измерений напряжения для определения азимутального угла падения.
| US 20100198569 A1, 05.08.2010 | |||
| US 20030055565 A1, 20.02.2003 | |||
| US 20030028324 A1, 06.02.2003 | |||
| WO 2011130587 A2, 20.10.2011 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНОГО И ГОРИЗОНТАЛЬНОГО УДЕЛЬНОГО СОПРОТИВЛЕНИЯ, А ТАКЖЕ УГЛОВ ОТНОСИТЕЛЬНОГО НАКЛОНА В АНИЗОТРОПНЫХ ГОРНЫХ ПОРОДАХ | 2003 |
|
RU2368922C2 |

