Область техники
Изобретение относится к летным испытаниям (ЛИ) моделей летательных аппаратов (ЛА) и непосредственно самих ЛА, а именно к способам определения управляющего сигнала по углу крена модели ГЛА для контроля аэродинамической идентичности по числам Рейнольдса траекторий полета модели и натурного изделия при проведении опережающих летных исследований. По результатам ЛИ можно проводить идентификацию и уточнение аэродинамических характеристик ЛА. Чем точнее определяется управляющий сигнал по углу крена в системе автоматического управления модели при заданных значениях угла атаки, тем точнее реализуется траектория движения модели, обеспечивающая идентичность чисел Рейнольдса испытываемой модели и натурного (основного) изделия, т.е. обеспечивающая выполнение критерия подобия по числам Рейнольдса. В динамическом процессе критерий подобия выражается в выполнении условия Reмод≈Reизд.
Изобретение относится к решению проблем при создании крылатых гиперзвуковых летательных аппаратов, совершающих полет в диапазоне скоростей, соответствующих числу М=3÷10, прежде всего исследованию аэродинамических характеристик на моделях таких ГЛА в натурных условиях полета. Соблюдение подобия по числам Рейнольдса (Re), помимо геометрического подобия модели и натурного (основного) изделия при тех же углах атаки в зависимости от чисел Маха, т.е. подобия по числу М, является одним из важных требований при идентификации аэродинамических характеристик Выполнение этих требований имеет также важное значение для обеспечения необходимых условий работы гиперзвукового прямоточного воздушно-реактивного двигателя (ГПВРД), интегрированного в конструкцию ЛА. Такие двигатели предполагается использовать для разгона ГЛА в диапазоне чисел М=3÷10. Число Re характеризует переход пограничного слоя из ламинарного в турбулентный.
В работе предлагается способ определения управляющего сигнала по углу крена, при котором реализуется траектория, удовлетворяющая поставленным критериям подобия по числам Re и М натурного изделия и испытываемой в полете модели.
Уровень техники
Одной из важных задач при проведении летных испытаний (ЛИ) летательных аппаратов (ЛА) с использованием их масштабных моделей является выполнение критериев подобия модели и натурного изделия. Один из важных критериев - соблюдение равенства чисел Рейнольдса по числу М при заданном угле атаки. Ставится задача нахождения величины угла крена, при реализации которого получим min отклонение чисел Рейнольдса для траекторий модели и натурного изделия. Эта задача приобретает важное значение при разработке гиперзвуковых летательных аппаратов (ГЛА), совершающих полет в широком диапазоне скоростей, соответствующих числам M=3÷10.
Подобие по числам Рейнольдса характеризует отношение сил вязкости и инерционных сил. Число Рейнольдса вычисляется по формуле
где V - скорость полета,
l - длина модели,
μ - коэффициент динамической вязкости воздуха,
ν - коэффициент кинематической вязкости воздуха.
Соблюдение критериев подобия по числу Re имеет важное значение при проведении работ по идентификации аэродинамических характеристик ЛА, прежде всего моментных характеристик. Оценка критериев подобия проводится как при исследовании отдельных элементов, так и всего ЛА.
В работе С.М. Дроздова «Метод определения натурных аэродинамических характеристик летательного аппарата с решетчатыми крыльями по результатам испытаний его модели в аэродинамических трубах»; Ученые Записки ЦАГИ, том XXXIII, №3-4, 2002 г. рассмотрена проблема нарушения подобия обтекания модельного и натурного летательных аппаратов с решетчатыми крыльями или стабилизаторами.
На этапе проектирования информацию об аэродинамических характеристиках (АДХ) большинства ЛА получают в результате испытаний в аэродинамических трубах (АДТ) моделей ЛА, изготовленных в уменьшенном масштабе. Известен факт значительного нарушения подобия по числам, реализуемым в АДТ и в условиях летного эксперимента. В ряде случаев АДХ могут оказаться чувствительными к такому нарушению подобия. При испытаниях в трубах эти нарушения приводят к смещению критических чисел М обтекания, сравнительно мало влияют на коэффициент нормальной силы, но существенно увеличивают коэффициент сопротивления. В некоторых случаях испытания модели дают завышенный запас продольной статической устойчивости ЛА, что необходимо принимать во внимание при исследовании короткопериодического движения ЛА, чтобы не допустить потерю устойчивости в продольном короткопериодическом движении.
В статье экспериментальная аэродинамика Х-38, AIAA 2000-2685; Томас Дж. Хорвард, Скотт А. Берри, Н. Рональд Мески НАСА, Исследовательский Центр Лэнгли, Хэмптон, Вирджиния приводятся некоторые результаты исследований в области экспериментальной аэродинамики опытного ВКС Х-38, предназначенного для возвращения астронавтов с орбиты. Авторы подробно описали методику исследований, используемый аппаратный комплекс и методы обработки результатов экспериментов по обдуву модели изделия Х-38 при числах Маха 6÷10.
В основе экспериментальных исследований [AIAA 2000-2685] лежит туннельный эффект, который подразумевает применение узких каналов на поверхности модели ГЛА для измерения поля давления. Для видеофиксации обтекания модели применяются видеокамеры высокоскоростной съемки с высоким разрешением. Процессы теплового нагрева визуализируются с помощью нанесения фосфорного слоя зеленоватого оттенка, который меняет свой цвет при различной температуре. С целью обеспечения необходимых условий для исследований чисел Рейнольдса с учетом физических и химических свойств газов авторы использовали в камере обдува модели потоки, состоящие из трех разных газов: тетрафлуорометана, очищенного воздуха и гелия.
Целью экспериментов было получение распределения давления, температуры и линий тока, измерение линейного отклонения вкраплений на поверхности испытуемой модели при различных углах атаки и отклонений элевонов. При этом проводилось исследование ударных волн, турбулентности и ламинарного потока вязкого течения с постоянным вычислением чисел Рейнольдса и определялось их влияние на эффективность элевонов. Затем методами компьютерного моделирования рассчитывалась картина поля обтекания и сравнивалась с результатами, полученными в экспериментах. По результатам сравнения данных эксперимента и моделирования уточнялись аэродинамические характеристики модели.
К недостаткам такого метода исследования можно отнести то, что эксперименты в гиперзвуковых камерах обдува могут давать серьезные погрешности при определении аэродинамических характеристик из-за влияния самой камеры на поток. К тому же получаемый в них диапазон чисел Рейнольдса весьма ограничен. Такие эксперименты могут проводиться в лабораторных условиях и не могут быть воспроизведены при проведении летных испытаний.
Наиболее близкой по содержанию работой, принятой за прототип, являются результаты, изложенные в книге «Жаростойкие и теплозащитные конструкции многоразовых аэрокосмических аппаратов» авт. Гофин М.Я.; изд-во ЗАО «ТФ «МИР», 2003 г.; раздел 2.9 «Некоторые конструктивные особенности летающих моделей БОР-4 и БОР-5».
Исходя из представленных в прототипе данных, можно получить изменения параметров Н и Re в зависимости как от скорости V, так и от числа М. Для этого дополнительно необходимо использовать табличные значения скорости звука по высоте. Значения чисел Рейнольдса вычислены по формуле  .
.
На фиг. 5 показаны траектории снижения в координатах H, V, перестроенные по материалам прототипа - графикам H(t), V(t).
На фиг. 6 показаны соответствующие изменения чисел Re.
Так как траектории в координатах H, V и в координатах Н, М при снижении со скоростью, меньше круговой, асимптотически устойчивы, то можно рассматривать зависимости Н и Re как от числа М, так и от V. Вследствие указанной устойчивости траекторного движения небольшим изменением числа М в зависимости от изменения скорости звука по высоте можно пренебречь. Приняты траектории по параметрам H, V, т.к. в полете проще получить информацию о скорости по результатам внешнетраекторных измерений.
Траектории снижения воздушно-космических аппаратов (ВКА) БОР-5 и БУРАН существенно отличались начальными условиями по высоте, скорости и углу наклона траектории. При испытаниях воздушно-космического аппарата БОР-5 основными задачами управления были выведение этого ГЛА в точку с расчетными координатами высоты Н и скорости V на траектории полета БУРАНА, а далее - устранение отклонений перегрузки от номинальных программных значений с целью предотвращения выхода модели на недопустимые перегрузки и температуры и выведение его в заданную точку приземления. В испытаниях ВКА БОР-5, являющегося моделью ВКА БУРАН в масштабе 1:8, выполнялось условие идентичности чисел Рейнольдса в момент выхода БОР-5 на траекторию полета ВКА БУРАН и спустя промежуток времени Δt≈60 сек, равный примерно половине периода собственных колебаний в продольном движении центра масс БОР-5. Больше нигде совпадений чисел Рейнольдса не было.
Из представленных на фиг. 6 зависимостей Re(V) следует, что при испытаниях моделей БОР-5 имелись существенные различия по числам Re модели и ВКА БУРАН, в особенности при числах М<4, что было особенно важно при идентификации моментных аэродинамических характеристик.
При управлении снижением моделей использовалась программная по времени система стабилизации перегрузки, выбранной при снижении с заданным номинальным углом крена. При действии внешних возмущений угол крена изменялся в соответствии с отклонением перегрузки от заданного программного значения, которое соответствует номинальному значению угла крена.
В динамическом колебательном процессе с большим периодом собственных колебаний невозможно добиться выполнения требуемого критерия подобия по числам Рейнольдса при заранее выбранном значении номинального угла крена. Как видно из фиг. 6, для выполнения этого критерия необходимо было бы прежде всего изменить кривизну траектории модели на участке V=2000÷5000 м/с за промежуток времени Δt≈60 с, что невозможно для такого изделия, имеющего значительно больший период собственных колебаний в движении центра масс. В изложенном в прототипе способе управления модели заранее заданы только отдельные две точки траекторий, которые удовлетворяют условиям подобия по числам Рейнольдса (см. фиг. 6). Кроме того, при полете с управлением по перегрузке не учитывались условия обтекания поверхности ГЛА.
Следовательно, при переносе аэродинамических характеристик ВКА ВОР-5 НА ВКА БУРАН могли быть получены погрешности, если не проводить дополнительное уточнение полученных результатов. На основании указанного в прототипе способа формирования управляющего сигнала по крену невозможно для такого типа летательных аппаратов добиться повышения точности выполнения критерия подобия по числам Re во всем диапазоне скоростей.
Раскрытие изобретения
Технический результат, на достижение которого направлено изобретение, заключается в повышении точности выполнения условий подобия по числам Рейнольдса модели и натурного изделия ГЛА на всей траектории полета, что достигается за счет непрерывного вычисления с высокой точностью управляющего сигнала по углу крена, обеспечивающего полет модели ГЛА по траектории снижения, удовлетворяющей критерию подобия по числам Re, т.е. условию Reмод≈Reизд.
Указанный технический результат достигается тем, что в способе определения управляющего сигнала по углу крена модели ГЛА для контроля аэродинамической идентичности по числам Рейнольдса траекторий полета модели и натурного изделия при проведении опережающих летных исследований, включающего измерения высоты, скорости полета, углов атаки и крена, необходимых при тех же углах атаки в зависимости от чисел Маха, что и для натурного изделия, бортовые измерения температуры, давления и плотности атмосферы, производят управление углом крена в полете согласно алгоритму

 - управляющий сигнал по углу крена модели в скоростной системе координат,
- управляющий сигнал по углу крена модели в скоростной системе координат,
θ - угол наклона траектории к плоскости местного горизонта,
r = Rзем+Н,
Rзем - средний радиус Земли,
Н - высота полета,
g(H) - ускорение свободного падения на высоте H,
cy(α, M) - коэффициент подъемной силы,
α - угол атаки,
М - число Маха,
S - характерная площадь модели,
m - масса модели,
l - длина модели,
ν - коэффициент кинематической вязкости воздуха,
Reизд - числа Рейнольдса натурного изделия (заданные).
В способе непрерывно в процессе полета по траектории снижения вычисляют необходимые управляющие сигналы по углу крена модели, обеспечивающие полет модели ГЛА по траектории, удовлетворяющей критерию подобия по числам Reмод≅Reизд, соответствующие заданным числам Рейнольдса натурного изделия, для этого по результатам траекторных измерений скорости полета, высоты и бортовых измерений температуры, давления, плотности атмосферы вычисляют параметры набегающего потока и по ним - значения коэффициента кинематической вязкости воздуха ν. По формуле  вычисляют текущее значение числа Reмод. модели. Затем вычисляют значения производной
вычисляют текущее значение числа Reмод. модели. Затем вычисляют значения производной  от угла наклона траектории по времени. В результате выполнения указанных процедур вычисляют управляющие сигналы по углу крена согласно формуле (1), необходимые в реализации траектории модели, для которой выполняется условие Reмод.≈Reизд. При ограничении диапазона управления принимают предельное значение угла крена. Полученные рассогласования по числам Рейнольдса ΔRe=Reмод-Reизд между экспериментальными и заданными значениями сравнивают с допустимыми значениями для оценки погрешности.
от угла наклона траектории по времени. В результате выполнения указанных процедур вычисляют управляющие сигналы по углу крена согласно формуле (1), необходимые в реализации траектории модели, для которой выполняется условие Reмод.≈Reизд. При ограничении диапазона управления принимают предельное значение угла крена. Полученные рассогласования по числам Рейнольдса ΔRe=Reмод-Reизд между экспериментальными и заданными значениями сравнивают с допустимыми значениями для оценки погрешности.
Используя полученные результаты измерений и вычислений, по формуле (1) вычисляют то значение угла крена, с которым должна лететь модель, чтобы текущие для модели и заданные для натурного изделия значения чисел Рейнольдса совпадали.
При таком подходе выбирается не траектория, которая проходит через заранее выбранные точки, а вычисляется угол крена, при отработке которого системой управления модель снижается по траектории, удовлетворяющей критерию подобия в каждой точке в соответствии со значением Reизд.
Подобие по числу Рейнольдса характеризует отношение сил вязкости и инерционных сил. Поэтому соблюдение подобия по числу Рейнольдса важно в первую очередь при идентификации моментных характеристик летательных аппаратов в исследованиях короткопериодического движения ЛА вокруг центра масс. Используя предложенный способ определения управляющего сигнала по углу крена модели, можно за счет изменения угла крена в пределах допустимого диапазона управления совершить полет по траектории, обеспечивающей достаточно высокую точность выполнения критерия подобия по числам Рейнольдса.
При условии, что программа изменения угла атаки реализуется в зависимости от скорости или числа М, то заявляемое решение позволяет проводить эксперименты с соблюдением критериев подобия по числам М и Re. Это позволит выполнить с большей точностью идентификацию аэродинамических характеристик, причем как силовых, так и моментных, а также исследовать параметры потока на входе в воздухозаборник ГПВРД.
Изобретение поясняется чертежами.
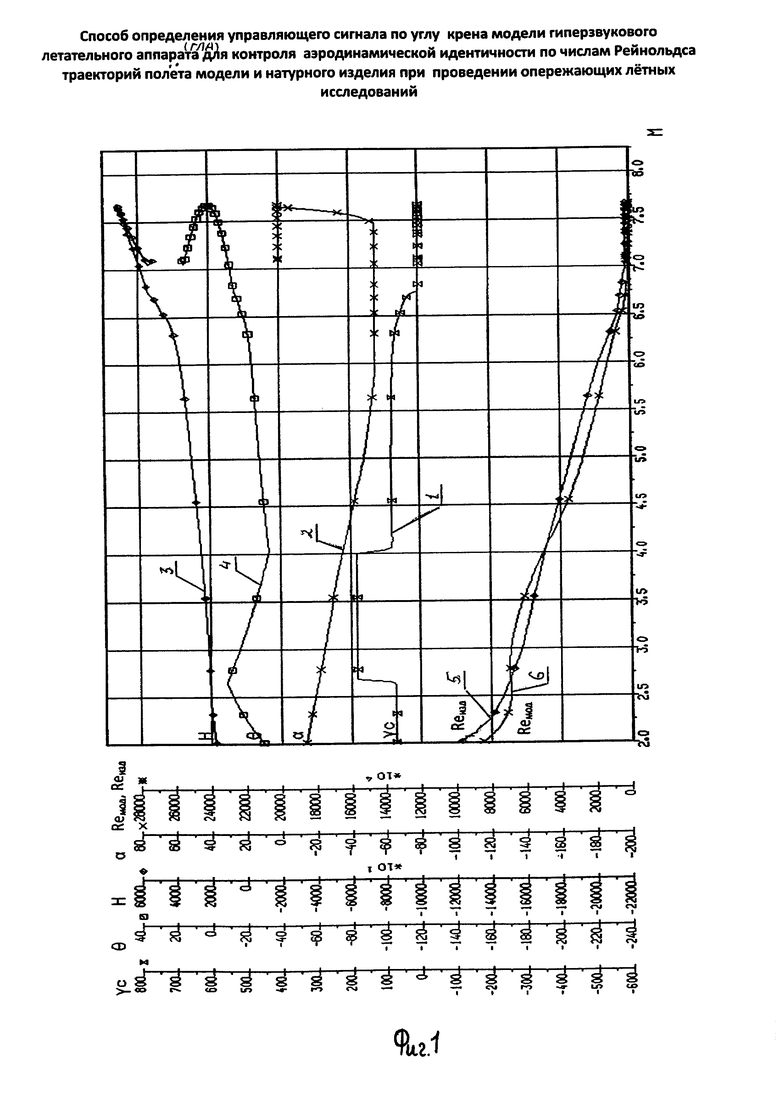
Фиг. 1 Траекторные параметры, угол атаки и числа Рейнольдса по числу Маха при управлении углом крена:
1 - управляющий сигнал по углу крена ,
2 - углы атаки α модели и натурного изделия,
3 - высота полета Н,
4 - угол наклона траектории θ к плоскости местного горизонта,
5 - числа Рейнольдса Reизд натурного изделия (заданные),
6 - числа Рейнольдса Reмод (вычисленные).
Из представленных материалов следует, что при использовании предложенного способа определения управляющего сигнала по углу крена модели можно за счет изменения угла крена в пределах допустимого диапазона управления совершить полет по траектории, обеспечивающей достаточно высокую точность выполнения критерия подобия по числам Рейнольдса.
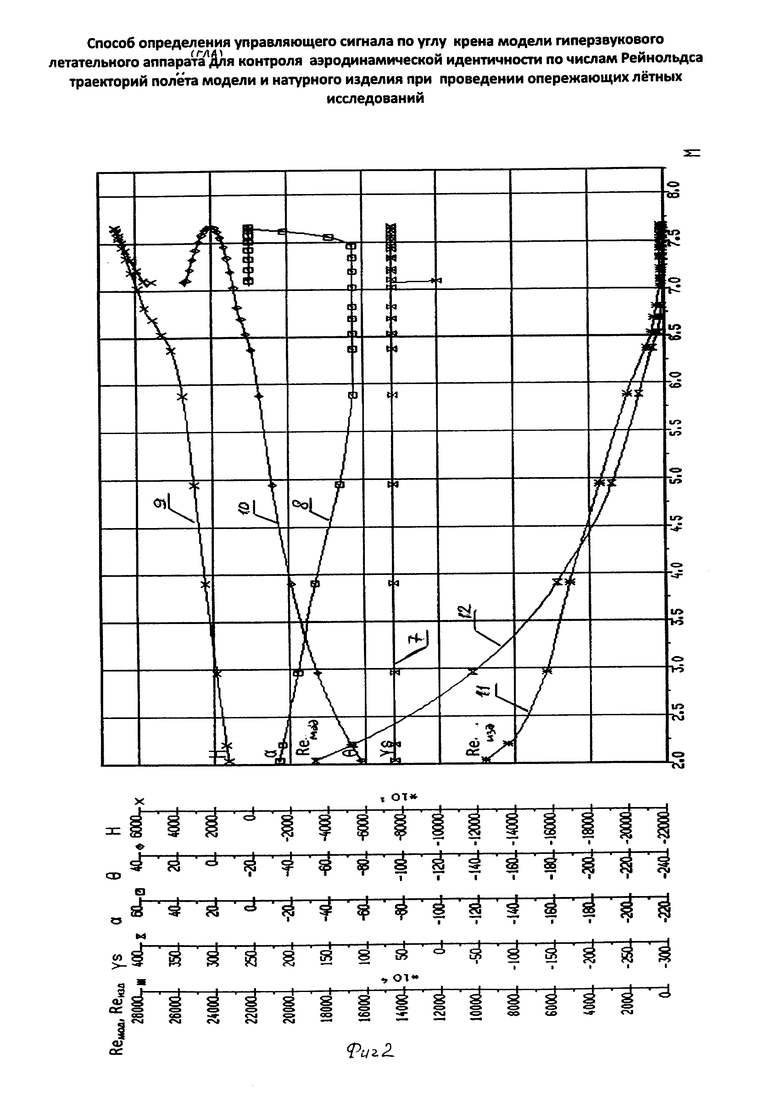
Фиг. 2 Траекторные параметры, угол атаки и числа Рейнольдса по числу Маха при произвольно заданном постоянном значении угла крена:
7 - заданное постоянное значение угла крена  ,
,
8 - углы атаки α модели и натурного изделия,
9 - высота полета Н,
10 - угол наклона траектории θ к плоскости местного горизонта,
11 - числа Рейнольдса Reизд натурного изделия (заданные),
12 - числа Рейнольдса Reмод (вычисленные).
Из представленных материалов следует, что в неуправляемом движении при  возможны существенные отклонения действительных чисел Рейнольдса от заданных. Принято значение ; т.к. cos 60°=0.5, то за счет изменения угла крена обеспечивается симметричный запас управления при изменении знака рассогласования ΔRe.
возможны существенные отклонения действительных чисел Рейнольдса от заданных. Принято значение ; т.к. cos 60°=0.5, то за счет изменения угла крена обеспечивается симметричный запас управления при изменении знака рассогласования ΔRe.
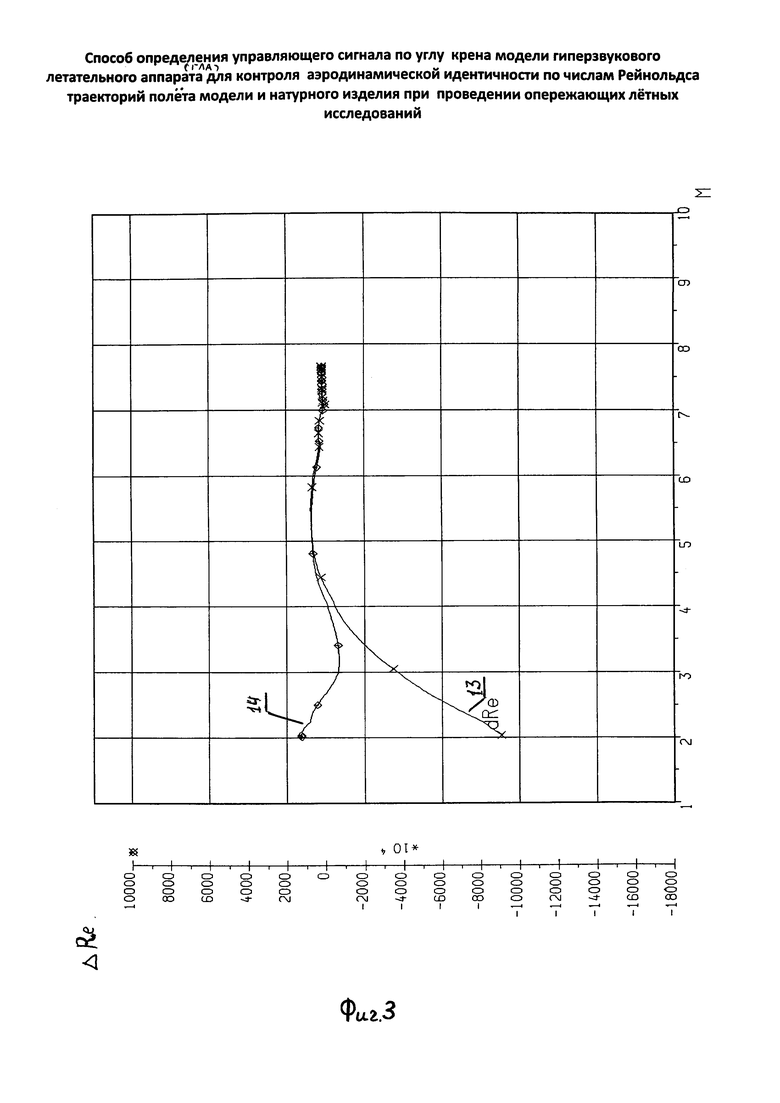
Фиг. 3 Рассогласования ΔRe=Reизд-Reизд по числам Рейнольдса для двух указанных траекторий:
13 - ΔRe … при полете с  ,
,
14 - ΔRe … при полете с согласно заявленному способу.
Представленные результаты показывают, что в неуправляемом движении при погружении в плотные слои атмосферы с ростом чисел Рейнольдса заметно возрастает рассогласование ΔRe и при М=2 рассогласование примерно в 9 раз больше, чем в управляемом движении согласно заявленному способу. На конечном участке траектории в плотных слоях атмосферы возрастает роль аэродинамического управления и существенное значение будут иметь погрешности в идентификации аэродинамических характеристик.
Фиг. 4. Блок-схема определения управляющего сигнала по углу крена модели гиперзвукового летательного аппарата и системы управления углом крена. На схеме показаны последовательно связанные блоки:
15 - электрогидравлический привод в канале управления креном,
16 - объект управления (модель ГЛА),
17 - система измерений (внешнетраекторные и бортовые измерения).
18 - блок формирования управляющего сигнала по углу крена, в котором осуществляются обработка всех измеренных данных и вычисление всех необходимых параметров, а также выдача выходных сигналов,
- управляющий сигнал по углу крена модели в скоростной системе координат,
Reизд - числа Рейнольдса натурного изделия (заданные),
Reмод - числа Рейнольдса (вычисленные),
ΔRe=Reмод-Reизд - сигнал рассогласования,
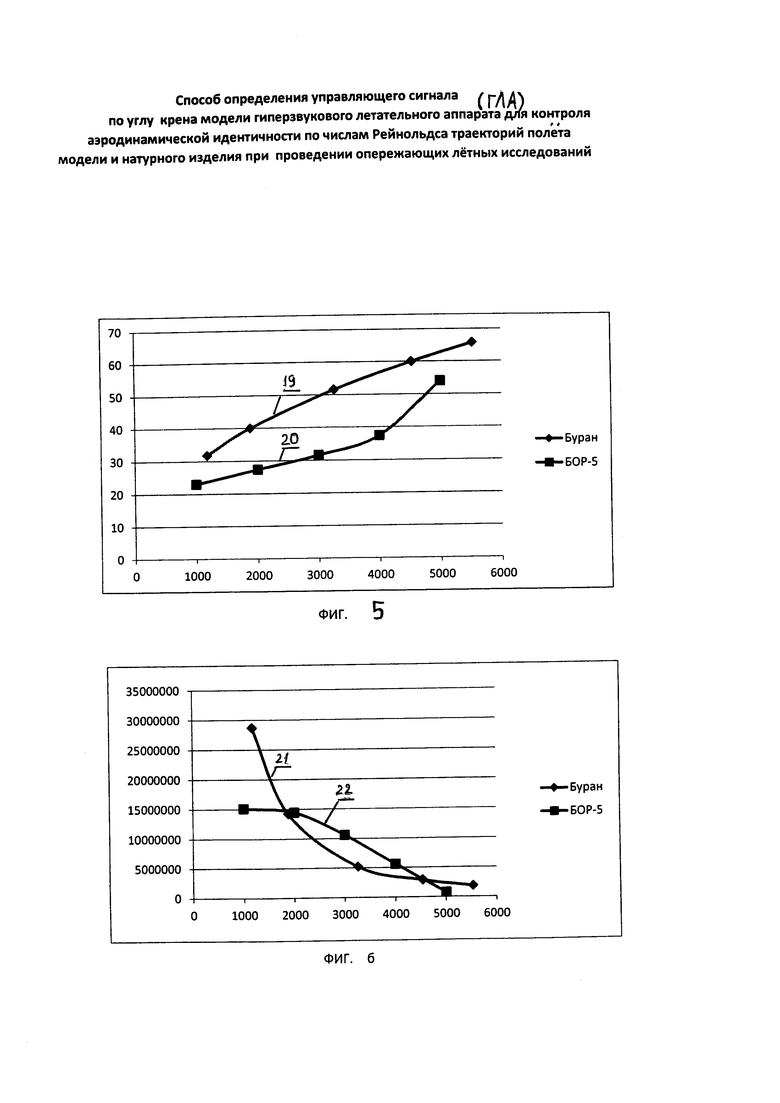
Показанные в прототипе результаты отражены на фиг. 5 и фиг. 6.
Фиг. 5 Изменения высоты по скорости:
19 - ВКА Буран,
20 - ВКА БОР-5 (МОДЕЛЬ БУРАНА 1:8).
Фиг. 6 Изменения чисел Рейнольдса по скорости:
21 - ВКА Буран,
22 - ВКА БОР-5 (МОДЕЛЬ БУРАНА 1:8).
Как видно из этих чертежей, числа Рейнольдса для этих ВКА в указанном диапазоне скоростей отличаются примерно в 2 раза. Критерий подобия выполняется только в двух точках траектории.
Таким образом, соблюдение критериев подобия по числу Re имеет важное значение при проведении работ по идентификации аэродинамических характеристик ЛА, прежде всего моментных характеристик. Оценка критериев подобия проводится как при исследовании отдельных элементов, так и всего ЛА. Предложенный способ позволяет выполнить такие работы со значительно большей точностью.
Предлагаемый способ осуществляют в следующей последовательности.
1. По результатам предварительного математического моделирования системы управления ЛА формируется блок памяти (фиг. 4, поз. 18), в который заносятся все необходимые аналитические зависимости и значения всех необходимых параметров испытываемой модели: расчета плотности атмосферы, кинематической вязкости по высоте, угла наклона траектории, банк аэродинамических характеристик модели в зависимости от числа Маха и угла атаки, параметров модели - характерная площадь и длина, начальная масса и секундный расход топлива, значения чисел Рейнольдса натурного изделия, закон изменения управляющего сигнала по углу крена согласно формуле (1), выставляют положение рулей согласно балансировке и начальному положению ЛА при отделении его от носителя (фиг. 4, поз. 16).
2. В процессе ЛИ модели производят измерения текущих значений высоты, скорости полета, углов атаки и крена, температуры, давления (фиг. 4, поз. 17), по которым определяют параметры набегающего потока и по ним - значения коэффициента кинематической вязкости воздуха ν (фиг. 4, поз. 18). Находят соответствующие числа М (фиг. 4, поз. 18). По формуле вычисляют текущее значение числа Рейнольдса Reмод. модели (фиг. 4 поз. 18). Затем вычисляют значения производной  от угла наклона траектории по времени (фиг. 4, поз. 18). В результате выполнения указанных процедур формируют управляющий сигнал по углу крена согласно формуле (1) (см. фиг.4, поз. 18), который поступает на электрогидравлический привод в канале управления креном (фиг. 4, поз. 15). При этом образуется необходимая траектория снижения модели, для которой выполняется условие Reмод≈Reизд.
от угла наклона траектории по времени (фиг. 4, поз. 18). В результате выполнения указанных процедур формируют управляющий сигнал по углу крена согласно формуле (1) (см. фиг.4, поз. 18), который поступает на электрогидравлический привод в канале управления креном (фиг. 4, поз. 15). При этом образуется необходимая траектория снижения модели, для которой выполняется условие Reмод≈Reизд.
Результаты исследования отражены на фиг. 1, где показаны изменения по числу М основных параметров модели и натурного изделия при использовании предложенного способа:
1 - - управляющий сигнал по углу крена модели в скоростной системе координат,
2 - угол атаки α модели и натурного изделия,
3 - высота полета Н,
4 - угол наклона траектории θ к плоскости местного горизонта,
5 - числа Рейнольдса Reизд натурного изделия (заданные),
6 - числа Рейнольдса Reмод (вычисленные). При ограничении диапазона управления принимают предельное значение угла крена. Полученные рассогласования по числам Рейнольдса ΔRe=Reмод-Reизд между экспериментальными и заданными значениями сравнивают с допустимыми для оценки погрешности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования управляющего сигнала по углу крена модели гиперзвукового летательного аппарата (ГЛА) для контроля аэродинамической идентичности по числам Рейнольдса траекторий полёта модели и натурного изделия при проведении опережающих лётных исследований аэродинамических характеристик | 2017 |
|
RU2650331C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАБЕГАЮЩЕГО ПОТОКА ЛЕТАТЕЛЬНОГО АППАРАТА В ПОЛЕТЕ НА РЕЖИМАХ ПЛАНИРОВАНИЯ С ГИПЕРЗВУКОВЫМИ ИЛИ ДОЗВУКОВЫМИ СКОРОСТЯМИ ДВИЖЕНИЯ | 1998 |
|
RU2135974C1 |
| Способ определения аэродинамического нагрева высокоскоростного летательного аппарата в опережающих лётных исследованиях на крупномасштабной модели | 2015 |
|
RU2616108C1 |
| Квазижесткая аэродинамическая модель несущей поверхности | 2023 |
|
RU2799100C1 |
| ДИНАМИЧЕСКИ ПОДОБНАЯ АЭРОДИНАМИЧЕСКАЯ МОДЕЛЬ НЕСУЩЕЙ ПОВЕРХНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2578915C1 |
| Квазижесткая аэродинамическая модель несущей поверхности | 2023 |
|
RU2799101C1 |
| Квазижесткая аэродинамическая модель несущей поверхности | 2023 |
|
RU2799102C1 |
| СПОСОБ ИСПЫТАНИЯ МОДЕЛИ ГИПЕРЗВУКОВОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2813741C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ПОПРАВОК К ПОКАЗАНИЯМ ПРИЕМНИКОВ ВОЗДУШНЫХ ДАВЛЕНИЙ | 2002 |
|
RU2214582C1 |
| СПОСОБ ЗАПУСКА ДВУХСТУПЕНЧАТОЙ УПРАВЛЯЕМОЙ РАКЕТЫ С ВОЗДУШНОГО НОСИТЕЛЯ | 2006 |
|
RU2321825C2 |

Изобретение относится к летным испытаниям (ЛИ) моделей летательных аппаратов (ЛА) и непосредственно самих ЛА, а именно к способам определения управляющего сигнала по углу крена модели гиперзвукового летательного аппарата (ГЛА). Способ включает измерения высоты, скорости полета, углов атаки и крена, необходимых при тех же углах атаки в зависимости от чисел Маха, что и для натурного изделия, бортовые измерения температуры, давления и плотности атмосферы, при этом производят управление углом крена в полете согласно алгоритму. При этом непрерывно в процессе полета по траектории снижения вычисляют необходимые углы крена для модели, обеспечивающие полет модели ГЛА по траектории, удовлетворяющей критерию подобия по числам Reмод≅Reизд, соответствующие заданным числам Рейнольдса натурного изделия. Для этого по результатам траекторных измерений скорости полета, высоты и бортовых измерений температуры, давления, плотности атмосферы вычисляют параметры набегающего потока и по ним - значения коэффициента кинематической вязкости воздуха ν, а затем вычисляют текущее значение числа ReI00 модели. Затем вычисляют значения производной от угла наклона траектории по времени. В результате выполнения указанных процедур вычисляют управляющие сигналы по углу крена, необходимые в реализации траектории модели, для которой выполняется условие Reмод≈Reизд. При ограничении диапазона управления принимают предельное значение угла крена. Полученные рассогласования по числам Рейнольдса ΔRe=Reмод-Reизд между экспериментальными и заданными значениями сравнивают с допустимыми значениями для оценки погрешности. Технический результат заключается в повышении точности выполнения условий подобия по числу Рейнольдса модели и натурного изделия ГЛА на всей траектории полета. 6 ил. 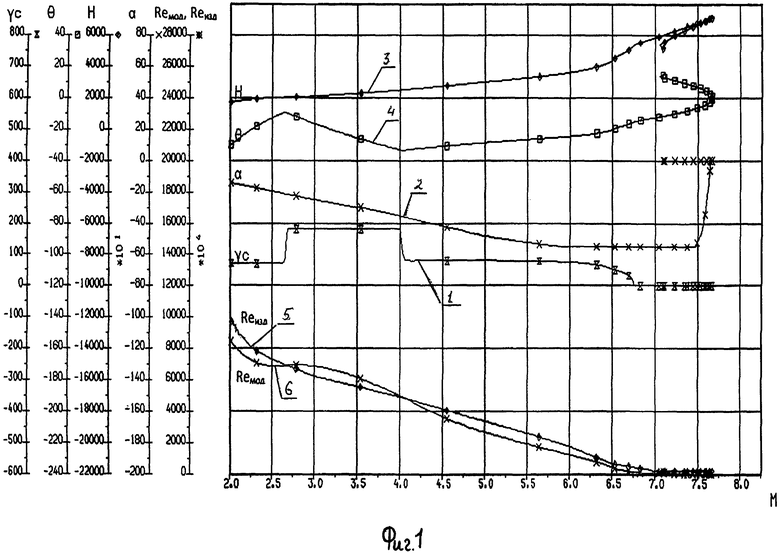
Способ определения управляющего сигнала по углу крена модели гиперзвукового летательного аппарата (ГЛА) для контроля аэродинамической идентичности по числам Рейнольдса траекторий полета модели и натурного изделия при проведении опережающих летных исследований, включающий измерения высоты, скорости полета, углов атаки и крена, необходимых при тех же углах атаки в зависимости от чисел Маха, что и для натурного изделия, бортовые измерения температуры, давления и плотности атмосферы, отличающийся тем, что производят управление углом крена в полете согласно алгоритму

 - управляющий сигнал по углу крена модели в скоростной системе координат,
- управляющий сигнал по углу крена модели в скоростной системе координат,
r=Rзем+H,
Rзем - средний радиус Земли,
Н - высота полета,
g(H) - ускорение свободного падения на высоте H,
cy (α,M) - коэффициент подъемной силы,
α - угол атаки,
М - число Маха,
S - характерная площадь модели,
m - масса модели,
 - длина модели,
- длина модели,
ν - коэффициент кинематической вязкости воздуха,
Reизд - числа Рейнольдса натурного изделия (заданные),
непрерывно в процессе полета по траектории снижения вычисляют необходимые углы крена для модели, обеспечивающие полет модели ГЛА по траектории, удовлетворяющей критерию подобия по числам Reмод≅Reизд соответствующие заданным числам Рейнольдса натурного изделия, для этого по результатам траекторных измерений скорости полета, высоты и бортовых измерений температуры, давления, плотности атмосферы вычисляют параметры набегающего потока и по ним - значения коэффициента кинематической вязкости воздуха ν по формуле

где V - скорость полета, вычисляют текущее значение числа Re модели, вычисляют значение производной  от угла наклона траектории по времени, в результате выполнения указанных процедур вычисляют управляющие сигналы по углу крена согласно формуле (1), необходимые в реализации траектории модели, для которой выполняется условие Reмод≈Reизд, при ограничении диапазона управления принимают предельное значение угла крена, а полученные рассогласования по числам Рейнольдса ΔRe=Reмод-Reизд между экспериментальными и заданными значениями сравнивают с допустимыми значениями для оценки погрешности.
от угла наклона траектории по времени, в результате выполнения указанных процедур вычисляют управляющие сигналы по углу крена согласно формуле (1), необходимые в реализации траектории модели, для которой выполняется условие Reмод≈Reизд, при ограничении диапазона управления принимают предельное значение угла крена, а полученные рассогласования по числам Рейнольдса ΔRe=Reмод-Reизд между экспериментальными и заданными значениями сравнивают с допустимыми значениями для оценки погрешности.
| "Жаростойкие и теплозащитные конструкции многоразовых аэрокосмических аппаратов" Гофин М.Я.; изд-во ЗАО "ТФ "МИР", 2003 г.; раздел 2.9 "Некоторые конструктивные особенности летающих моделей БОР-4 и БОР-5" | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАБЕГАЮЩЕГО ПОТОКА ЛЕТАТЕЛЬНОГО АППАРАТА В ПОЛЕТЕ НА РЕЖИМАХ ПЛАНИРОВАНИЯ С ГИПЕРЗВУКОВЫМИ ИЛИ ДОЗВУКОВЫМИ СКОРОСТЯМИ ДВИЖЕНИЯ | 1998 |
|
RU2135974C1 |
| С.М | |||
| Дроздов "Метод определения натурных аэродинамических характеристик летательного аппарата с решетчатыми крыльями по результатам испытаний его модели в аэродинамических трубах"; Ученые Записки ЦАГИ, том XXXIII, N3-4, 2002 г. | |||

