Область техники
Изобретение относится к летным испытаниям (ЛИ) моделей летательных аппаратов (ЛА) и непосредственно самих гиперзвуковых летательных аппаратов (ГЛА) - натурных изделий, а именно к способу формирования управляющего сигнала по углу крена модели ГЛА для контроля аэродинамической идентичности по числам Рейнольдса траекторий полета модели и натурного изделия при проведении опережающих летных исследований аэродинамических характеристик.
По результатам ЛИ проводят идентификацию и уточнение аэродинамических характеристик ЛА. Чем точнее выполнены критерии подобия, тем точнее могут быть идентифицированы аэродинамические характеристики натурного изделия. Одним из важных является критерий подобия по числам Рейнольдса. Для реализации его в реальном масштабе времени и с целью повышения точности выполнения критерия подобия можно использовать алгоритмические методы построения систем управления углом крена при заданном угле атаки, обеспечивающие полет по траектории, удовлетворяющей требуемому критерию подобия по числам Рейнольдса.
Путем вычисления угла крена, соответствующего требуемым числам Рейнольдса в текущий момент времени, и использования управления углом крена в скользящем режиме можно наиболее точно отследить методом автоматического управления требуемые числа Рейнольдса. Это позволяет реализовать траекторию движения модели, оптимальную для идентичности чисел Рейнольдса испытываемой модели и натурного (основного) изделия, т.е. для выполнения критерия подобия по числам Рейнольдса (Reмод ≈ Reизд) с низким уровнем погрешностей (~5%).
Изобретение относится к решению проблем идентификации аэродинамических характеристик крылатых гиперзвуковых летательных аппаратов в летном эксперименте и уточнения их в натурных условиях полета в диапазоне скоростей, соответствующих числам M=2÷10. При идентификации аэродинамических характеристик важно, помимо геометрического подобия модели и натурного (основного) изделия, соблюсти критерии подобия по числам М при равенстве углов атаки, числам Рейнольдса Re, и др. Выполнение этих критериев так же имеет большое значение для обеспечения условий работы гиперзвукового прямоточного воздушно-реактивного двигателя (ГПВРД), интегрированного в конструкцию ЛА. Такие двигатели предполагается использовать для разгона ГЛА в диапазоне чисел М=3÷10.
В работе предлагается способ реализации критерия подобия по числам Re модели гиперзвукового летательного аппарата (ГЛА) и натурного изделия при снижении с заданным углом атаки и при управлении углом крена в скользящем режиме для проведения опережающих летных исследований аэродинамических характеристик при соблюдении критериев подобия по числам Re и М натурного изделия с испытуемой в полете моделью.
Уровень техники
В рамках аэродинамического эксперимента, проводимого в летных испытаниях (ЛИ) летательных аппаратов (ЛА) с применением их масштабных моделей, необходимо обеспечить соблюдение критериев подобия модели и натурного изделия. К этим условиям относится соблюдение критерия подобия по числу Рейнольдса и по числу М при заданном угле атаки. Суть задачи заключается в том, чтобы найти все значения угла крена, позволяющие выполнить полет модели по траектории с числами Рейнольдса, имеющими min рассогласование с числами Рейнольдса траектории натурного изделия. Решение этой задачи необходимо при уточнении аэродинамического облика гиперзвуковых ЛА (ГЛА), осуществляющих полет на скоростях, соответствующих числам М=3÷10.
Числа Рейнольдса отражают соотношение сил вязкости и инерционности, действующих на модель и натурное изделие. Обеспечение их подобия свидетельствует, прежде всего, о подобии сил лобового сопротивления, сил во вращательном движении относительно связанных осей. Поэтому при ошибках в выполнении критерия подобия возможны, прежде всего, ошибки в определении коэффициента лобового сопротивления, в продольной балансировке, в коэффициентах боковой устойчивости. Числа Рейнольдса определяются по формуле:
 ,
,
где V - скорость полета,
l - длина модели,
ν - коэффициент кинематической вязкости воздухаВ аэродинамических трубах проводятся эксперименты по определению аэродинамических характеристик, исследуются возможности обеспечения критериев подобия. В ЛИ организуются траектории полета, на которых выполняются критерии подобия.
На этапе проектирования информацию об аэродинамических характеристиках (АДХ) большинства ЛА получают в результате испытаний в аэродинамических трубах (АДТ) моделей ЛА, изготовленных в уменьшенном масштабе. Известен факт значительного нарушения подобия по числам Re, реализуемых в АДТ и в условиях летного эксперимента. В ряде случаев АДХ могут оказаться чувствительными к такому нарушению подобия. При испытаниях в трубах эти нарушения приводят к смещению критических чисел М обтекания, сравнительно мало влияют на коэффициент нормальной силы, но существенно увеличивают коэффициент сопротивления. В некоторых случаях испытания модели дают завышенный запас продольной статической устойчивости ЛА, что необходимо принимать во внимание при исследовании короткопериодического движения ЛА.
В статье «Экспериментальная аэродинамика Х-38», издательство AIAA 2000-2685; Томас Дж. Хорвард, Скотт А. Берри, Н. Рональд Мески; НАСА, Исследовательский Центр Лэнгли, Хэмптон, Виргиния приводятся некоторые результаты исследований в области экспериментальной аэродинамики опытного воздушно-космического самолета(ВКС)Х-38, предназначенного для возвращения астронавтов с орбиты. Авторы подробно описали методику исследований, используемый аппаратный комплекс и методы обработки результатов экспериментов по обдуву модели изделия Х-38 при числах Маха 6÷10.
В основе экспериментальных исследований [AIAA 2000-2685] лежит туннельный эффект, который подразумевает применение узких каналов на поверхности модели ГЛА для измерения поля давления. Для видеофиксации обтекания модели применяются видеокамеры высокоскоростной съемки с высоким разрешением. Процессы теплового нагрева визуализируются с помощью нанесения фосфорного слоя зеленоватого оттенка, который меняет свой цвет при различной температуре. С целью обеспечения необходимых условий для исследований чисел Рейнольдса с учетом физических и химических свойств газов авторы использовали в камере обдува модели потоки, состоящие из трех разных газов: тетрафлуорометана, очищенного воздуха и гелия.
Целью экспериментов было получение распределения давления, температуры и линий тока, измерение линейного отклонения вкраплений на поверхности испытуемой модели аэродинамики при различных углах атаки и отклонений элевонов. При этом проводилось исследование ударных волн, турбулентности и ламинарного потока вязкого течения с постоянным вычислением чисел Рейнольдса и определялось их влияние на эффективность элевонов. Затем методами компьютерного моделирования рассчитывалась картина поля обтекания и сравнивалась с результатами, полученными в экспериментах. По результатам сравнения данных эксперимента и моделирования уточнялись аэродинамические характеристики модели.
К недостаткам такого метода исследования можно отнести то, что эксперименты в гиперзвуковых камерах обдува могут давать серьезные погрешности при определении аэродинамических характеристик из-за влияния самой камеры на поток. К тому же получаемый в них диапазон чисел Рейнольдса весьма ограничен. Такие эксперименты могут проводиться в лабораторных условиях и не могут быть воспроизведены при проведении летных испытаний.
Наиболее близким, принятым за прототип, является «Способ определения управляющего сигнала по углу крена модели ГЛА для контроля аэродинамической идентичности по числам Рейнольдса траекторий полета модели и натурного изделия при проведении опережающих летных исследований», авт. Ловицкий Л.Л., Садртдинов В.Д.. патент RU 2615220 С1, опубл. 04.04.2017.
Согласно способу, описанному в прототипе, на борту модели ГЛА производится непрерывно определение управляющего сигнала модели по углу крена  , который удовлетворяет условиям подобия по числам Рейнольдса в текущий момент времени, без учета динамических характеристик при развороте по крену. Такой способ не может обеспечить повышение точности выполнения критерия подобия при недостаточном быстродействии системы или ограниченном запасе управления в динамическом переходном процессе управляемого движения при быстром изменении числа Re, что характерно для конечного участка траектории. В этом способе алгоритм построен по принципу разомкнутого управления: нет обратной связи и контроля в реальном масштабе времени числа
, который удовлетворяет условиям подобия по числам Рейнольдса в текущий момент времени, без учета динамических характеристик при развороте по крену. Такой способ не может обеспечить повышение точности выполнения критерия подобия при недостаточном быстродействии системы или ограниченном запасе управления в динамическом переходном процессе управляемого движения при быстром изменении числа Re, что характерно для конечного участка траектории. В этом способе алгоритм построен по принципу разомкнутого управления: нет обратной связи и контроля в реальном масштабе времени числа
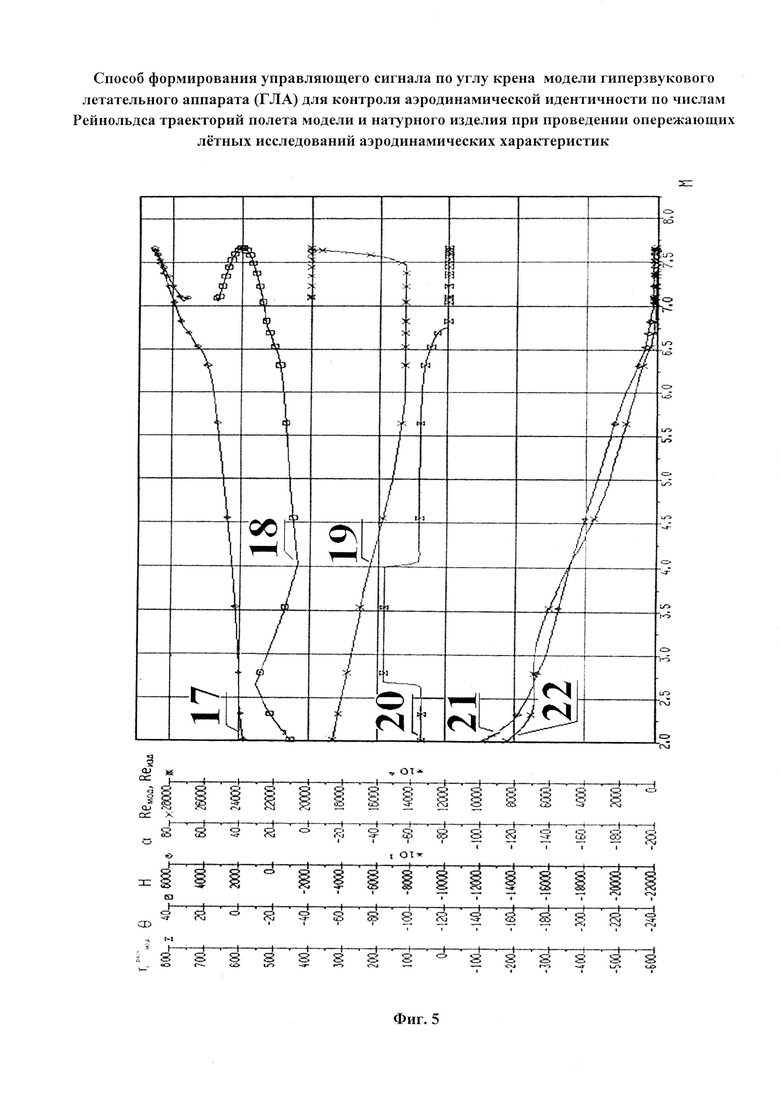
На фиг. 5 показаны результаты использования этого способа управления углом крена моделью. Ошибки полученных чисел Рейнольдса достигают 10-15%.
Однако приведенный в прототипе способ не может обеспечить повышение точности выполнения критерия подобия при недостаточном быстродействии системы или ограниченном запасе управления в динамическом переходном процессе управляемого движения при быстром изменении числа Re, что характерно, в частности, для конечного участка траектории. Быстрое изменение числа Рейнольдса обусловлено уменьшением коэффициента кинематической вязкости ν практически по exp закону, причем темп уменьшения его опережает темп уменьшения скорости полета. Алгоритм управления, построенный по принципу разомкнутого управления, не позволяет формировать в системе автоматического управления сигнал угла крена по реальному рассогласованию числа Рейнольдса модели и изделия с учетом динамики переходных процессов и тем самым корректировать его.
Способ определения управляющего сигнала модели по углу крена, изложенный в прототипе, при котором непрерывно вычисляются на борту расчетные значения , удовлетворяющие условиям подобия по числам Рейнольдса в текущий момент времени, практически жестко фиксированный по величине вычисленного угла крена, не может обеспечить повышение точности выполнения критерия подобия при недостаточном быстродействии системы или ограниченном запасе управления в динамическом переходном процессе управляемого движения при быстром изменении числа Re, что характерно для конечного участка траектории.
В предлагаемом способе реализована главная обратная связь по числам Рейнольдса, которая позволяет осуществлять коррекцию угла крена в соответствии с отклонением достигнутого числа Рейнольдса от заданного.
Технический результат, на достижение которого направлено изобретение, заключается в повышении точности выполнения критерия подобия по числу Рейнольдса модели и натурного изделия ГЛА на всей траектории полета, в том числе на конечном участке в плотных слоях атмосферы при быстром изменении чисел Рейнольдса, что достигается за счет непрерывного вычисления с упреждением и высокой точностью требуемого угла крена и организации при достижении  скользящего релейного режима, который обеспечивает уменьшение ошибки по числам Рейнольдса («скольжение» к нулевому рассогласованию ΔRe).
скользящего релейного режима, который обеспечивает уменьшение ошибки по числам Рейнольдса («скольжение» к нулевому рассогласованию ΔRe).
Раскрытие изобретения
Для достижения указанного технического результата в способе формирования управляющего сигнала по углу крена модели гиперзвукового летательного аппарата (ГЛА) для контроля аэродинамической идентичности по числам Рейнольдса траекторий полета модели и натурного изделия при проведении опережающих летных исследований аэродинамических характеристик, включающем измерения высоты, скорости полета, углов атаки и крена, необходимых для контроля требования аэродинамической идентичности чисел Рейнольдса на траектории полета модели при тех же углах атаки в зависимости от чисел Маха, что и для натурного изделия, бортовые измерения температуры, давления, плотности атмосферы, значение скоростного расчетного угла крена модели вычисляют по формуле:
 ,
,
где:
γс - угол крена в скоростной системе координат (угол вращения),
θ - угол наклона траектории к плоскости местного горизонта,
V - скорость полета,
r = Rзем+Н,
Rзем - средний радиус Земли,
Н - высота полета,
g(H) - ускорение свободного падения на высоте Н,
Y = су (α, М)⋅q⋅S - подъемная сила,
су(α,М) - коэффициент подъемной силы,
α - угол атаки,
М - число Маха,
 - скоростной напор,
- скоростной напор,
S - характерная площадь модели,
m - масса модели,
l - длина модели,
ν - коэффициент кинематической вязкости воздуха, по которой непрерывно в процессе полета модели проводят вычисление углов крена  , соответствующих числам Рейнольдса натурного изделия в каждый фиксированный момент времени, а по результатам траекторных измерений скорости полета, высоты и бортовых измерений температуры, давления, плотности атмосферы, вычисление параметров набегающего потока и по ним - значения коэффициента кинематической вязкости воздуха ν, вычисление значения производной
, соответствующих числам Рейнольдса натурного изделия в каждый фиксированный момент времени, а по результатам траекторных измерений скорости полета, высоты и бортовых измерений температуры, давления, плотности атмосферы, вычисление параметров набегающего потока и по ним - значения коэффициента кинематической вязкости воздуха ν, вычисление значения производной  , по формуле
, по формуле  вычисление текущего значения числа Reмод вычисление рассогласования ΔRe=Reмод-Reизд между текущим (экспериментальным) значением чисел Re, получаемым в полете модели, и заданным, вычисленное расчетное значение угла крена модели
вычисление текущего значения числа Reмод вычисление рассогласования ΔRe=Reмод-Reизд между текущим (экспериментальным) значением чисел Re, получаемым в полете модели, и заданным, вычисленное расчетное значение угла крена модели  корректируют с учетом сигнала упреждения, рассчитанного по формуле
корректируют с учетом сигнала упреждения, рассчитанного по формуле  с постоянной величиной TRe, для этого создают опережение в формировании требуемого угла крена, вычисленный на борту ЛА в реальном масштабе времени, вычисляют значение производной,
с постоянной величиной TRe, для этого создают опережение в формировании требуемого угла крена, вычисленный на борту ЛА в реальном масштабе времени, вычисляют значение производной,  или
или  и умножают на постоянную величину TRe, в результате выполнения указанных процедур находят требуемое скорректированное значение угла крена по формуле:
и умножают на постоянную величину TRe, в результате выполнения указанных процедур находят требуемое скорректированное значение угла крена по формуле:

необходимое при реализации переходного процесса для выхода на траекторию модели, на которой с большей точностью выполняется условие Reмод ≈ Reизд; при увеличении требуемого угла крена за пределы первой четверти в алгоритме управления организуется скользящий режим переключения относительно значения  в диапазоне
в диапазоне  , что позволяет в релейном режиме с наибольшим быстродействием охватить весь диапазон управления и за счет этого повысить точность выполнения критерия подобия по числам Рейнольдса, что дает возможность повысить точность идентификации аэродинамических характеристик по результатам летных испытаний.
, что позволяет в релейном режиме с наибольшим быстродействием охватить весь диапазон управления и за счет этого повысить точность выполнения критерия подобия по числам Рейнольдса, что дает возможность повысить точность идентификации аэродинамических характеристик по результатам летных испытаний.
Система дополнена корректирующим звеном для повышения качества переходных процессов, в частности, дифференцирующим звеном по сигналу рассогласования ΔRec целью опережения подачи сигнала. Для переключения в скользящем режиме выбран уровень относительно оси  в диапазоне
в диапазоне  , что позволяет в релейном режиме с наибольшим быстродействием охватить весь диапазон управления для выполнения критерия подобия по числам Рейнольдса, что дает возможность повысить точность идентификации аэродинамических характеристик по результатам летных испытаний.
, что позволяет в релейном режиме с наибольшим быстродействием охватить весь диапазон управления для выполнения критерия подобия по числам Рейнольдса, что дает возможность повысить точность идентификации аэродинамических характеристик по результатам летных испытаний.
Такой подход может быть использован при построении алгоритмов по другим критериям подобия, требуемым при определении в летных испытаниях модели ЛА. Он позволяет использовать принципы построения замкнутых систем управления для нахождения траекторий полета моделей, удовлетворяющих критериям подобия с натурными изделиями, не прибегая к решению оптимальных задач. Система может быть дополнена другими корректирующими звеньями с целью повышения качества переходных процессов и повышения точности исполнения поступающей на вход команды.
Предлагаемый способ поясняется следующими графиками и чертежом.
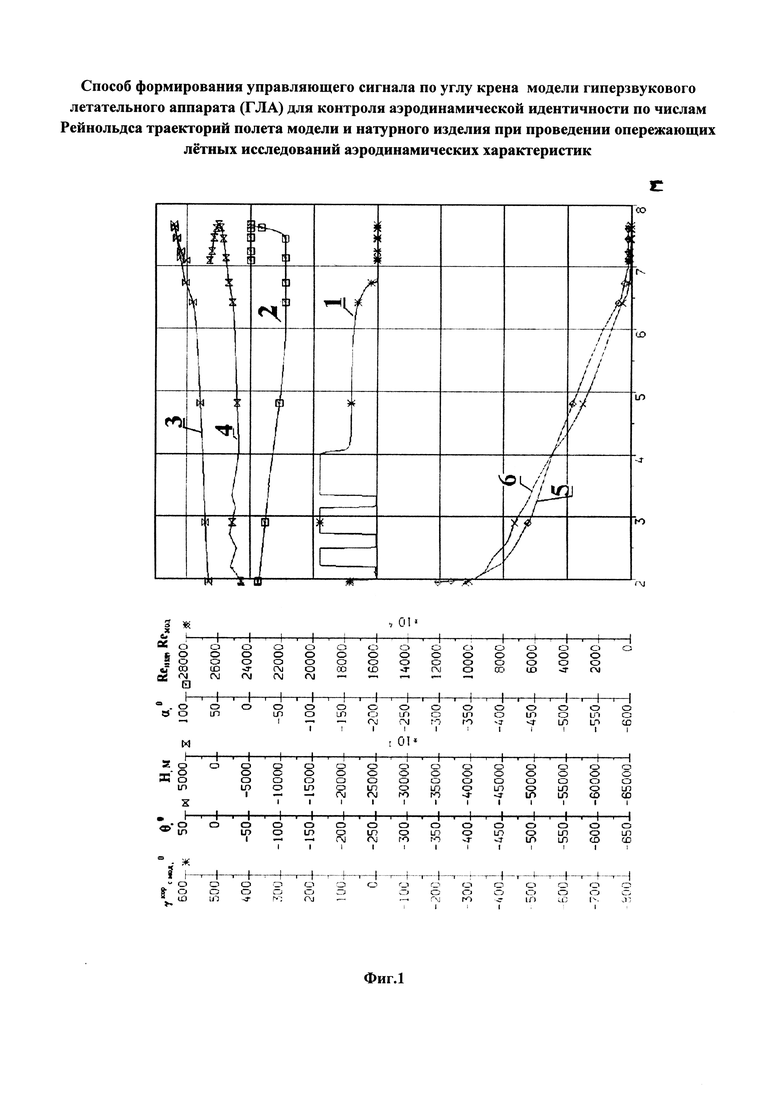
На фиг. 1 приведены изменения параметров траектории модели, угла атаки и числа Рейнольдса по числу Маха при управлении в скользящем режиме по сигналу с дифференцирующего звена, которое обеспечивает коррекцию расчетного значения угла крена:
1 - требуемое скорректированное значение скоростного угла крена  ,
,
2 - углы атаки α модели и натурного изделия,
3 - высота полета Н,
4 - угол наклона траектории θ к плоскости местного горизонта,
5 - числа Рейнольдса Reизд натурного изделия (заданные),
6 - числа Рейнольдса Reмод (скорректированные).
Из представленных материалов следует, что при использовании предложенного способа определения управляющего сигнала  , полученного в результате коррекции
, полученного в результате коррекции  , можно за счет изменения угла крена в пределах допустимого диапазона управления в скользящем режиме совершить полет по траектории, обеспечивающей достаточно высокую точность выполнения критерия подобия по числам Рейнольдса; отклонения по числам Рейнольдса не превышают 5%.
, можно за счет изменения угла крена в пределах допустимого диапазона управления в скользящем режиме совершить полет по траектории, обеспечивающей достаточно высокую точность выполнения критерия подобия по числам Рейнольдса; отклонения по числам Рейнольдса не превышают 5%.
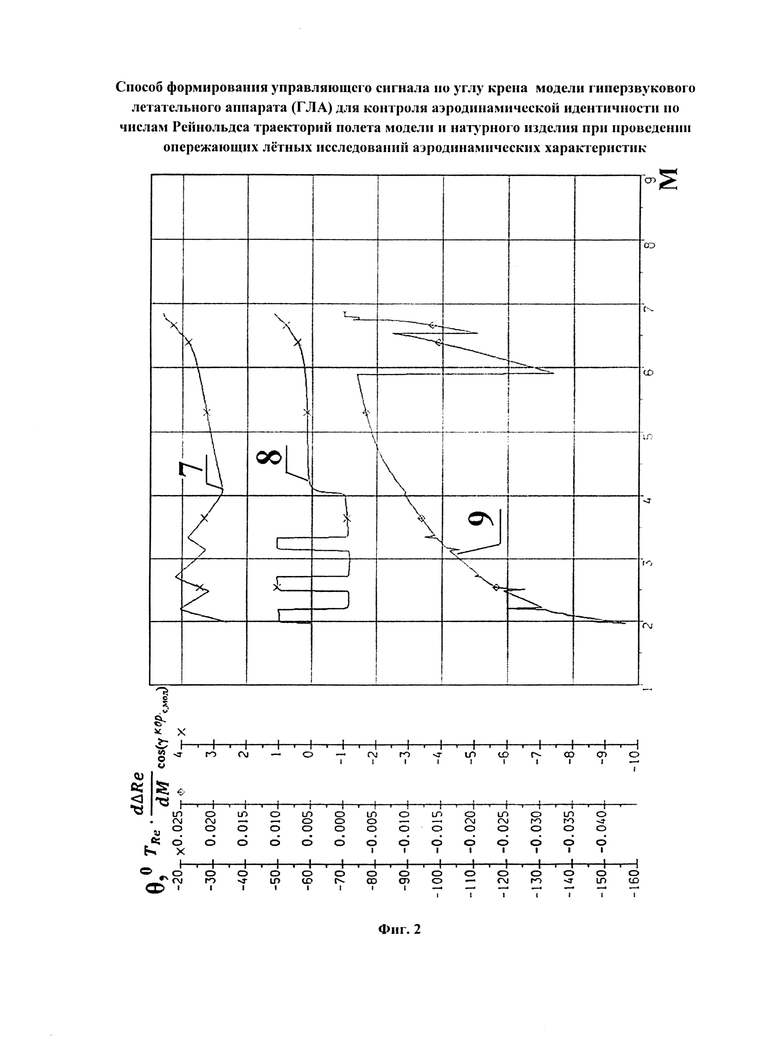
На фиг. 2 - изменения угла наклона траектории, косинуса угла крена с коррекцией и опережающей частью управляющего сигнала по числу Маха для случая управления в скользящем режиме:
7 - угол наклона траектории к плоскости местного горизонтаθ,
8 - косинус скоростного расчетного угла крена  ,
,
9 - дифференциальная часть (опережающая часть)  управляющего сигнала
управляющего сигнала 
Результат достигается тем, что к значению  при достижении
при достижении  добавляется корректирующее импульсное приращение
добавляется корректирующее импульсное приращение , одновременно указывающее, вследствие инерционности, в какую сторону должен изменяться угол крена, чтобы устранить рассогласование по числу Рейнольдса: увеличение до
, одновременно указывающее, вследствие инерционности, в какую сторону должен изменяться угол крена, чтобы устранить рассогласование по числу Рейнольдса: увеличение до  или уменьшение до
или уменьшение до  .
.
При таком подходе формируется опережение по времени переключения угла крена, которое позволяет уменьшить запаздывание при развороте ЛА по крену и за счет этого повысить точность отработки заданного сигнала, т.е., уменьшить ошибку ΔRe= Reмод-Reизд. Такой способ практически открывает путь к реализации в летных испытаниях траекторий моделей, удовлетворяющих заданным критериям подобия, и эффективен при быстром изменении чисел Рейнольдса. Процесс переключения иллюстрируется практически пилообразными изменениями величин траекторного угла θ, что свидетельствует об эффективном воздействии угла крена при изменении его на величину до 90°.
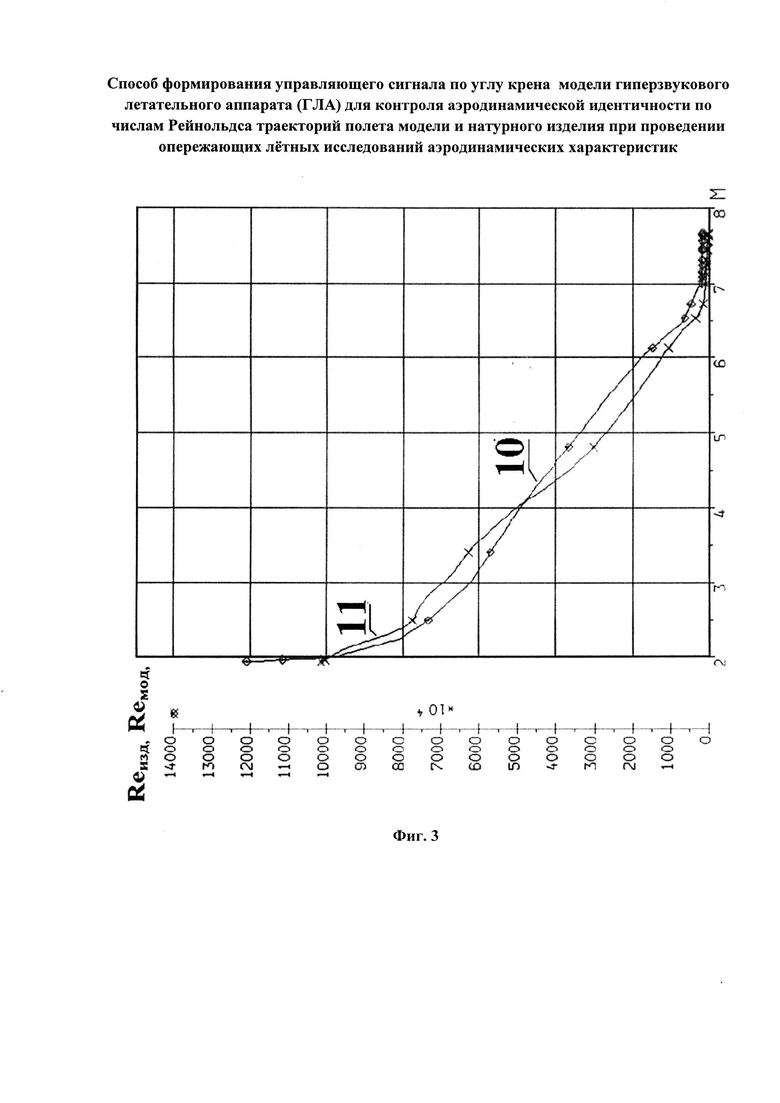
На фиг. 3. - изменения чисел Рейнольдса по числу М: для натурного изделия и при управлении в скользящем режиме по  :
:
10 - Reизд для натурного изделия;
11 - Reмод при управлении моделью в скользящем режиме,
Графики отражают то, что полет модели с управлением в скользящем режиме по углу крена обеспечивает уменьшение ошибки по числам Рейнольдса («скольжение» к нулевому значению).
На фиг. 4. - структурная схема формирования угла крена согласно предложенному способу.
На схеме показаны последовательно связанные блоки:
12 - опережающее звено с постоянным коэффициентом TRe,
13 - привод в канале угла крена,
14 - объект управления (модель ГЛА),
15 - система измерений (внешнетраекторных и бортовых),
16 - БЦВМ.
Структурная схема имеет главную обратную связь по текущему числу Reмод (вых. 1, связан с вх. 23), вычисленного при обработке алгоритма управления угла крена модели, которое должно удовлетворять критерию подобия, и обратную связь по расчетному углу крена модели  (вых. 2, связан с вх. 24). На вх. 23 системы сигнал обратной связи сравнивается с заданным сигналом натурного изделия Reизд. Схема содержит дифференцирующее звено (опережающее с коэффициентомTRe), блоки системы измерений 15, БЦВМ 16 для обработки результатов измерений в реальном масштабе времени. Предложенный способ обеспечивает выполнение критерия подобия путем устранения ошибки ΔRe= Reмод-Reизд при управлении по сигналу
(вых. 2, связан с вх. 24). На вх. 23 системы сигнал обратной связи сравнивается с заданным сигналом натурного изделия Reизд. Схема содержит дифференцирующее звено (опережающее с коэффициентомTRe), блоки системы измерений 15, БЦВМ 16 для обработки результатов измерений в реальном масштабе времени. Предложенный способ обеспечивает выполнение критерия подобия путем устранения ошибки ΔRe= Reмод-Reизд при управлении по сигналу  .
.
При условии, что программа изменения угла атаки реализуется в зависимости от скорости или числа М, то заявляемое решение позволяет проводить эксперименты с соблюдением критериев подобия по числам М и Re. Это позволит выполнить с большей точностью идентификацию аэродинамических характеристик, причем как силовых, так и моментных.
Подобие по числу Рейнольдса характеризует отношение сил вязкости и инерционных сил. Поэтому соблюдение подобия по числу Рейнольдса важно, в первую очередь, при идентификации моментных характеристик летательных аппаратов.
На фиг. 5 - изменения параметров траектории, угла атаки и числа Рейнольдса по числу М при управлении по вычисленному значению угла крена в прототипе:
17 - высота полета Н,
18 - угол наклона траектории в к плоскости местного горизонта,
19 - углы атаки а модели и натурного изделия,
20 - вычисленное значение угла крена  ,
,
21 - числа Рейнольдса Reизд натурного изделия (заданные),
22 - числа Рейнольдса Reмод (вычисленные).
Из представленных материалов следует, что при использовании в САУ управляющего вычисленного сигнала по углу крена модели  можно за счет изменения угла крена в пределах допустимого диапазона управления совершить полет по траектории, обеспечивающей достаточно высокую точность выполнения критерия подобия по числам Рейнольдса. Однако, при быстром изменении числа Рейнольдса (в частности, на конечном участке) точность уступает точности, которую можно получить в скользящем режиме управления, использующем корректирующий сигнал
можно за счет изменения угла крена в пределах допустимого диапазона управления совершить полет по траектории, обеспечивающей достаточно высокую точность выполнения критерия подобия по числам Рейнольдса. Однако, при быстром изменении числа Рейнольдса (в частности, на конечном участке) точность уступает точности, которую можно получить в скользящем режиме управления, использующем корректирующий сигнал  .
.
Предлагаемый способ осуществляют в следующей последовательности. По результатам предварительного математического моделирования системы управления ЛА формируется блок памяти БЦВМ (фиг. 4 поз. 16), в который заносятся все необходимые аналитические зависимости и значения всех необходимых параметров испытуемой модели: плотность атмосферы, кинематическая вязкость, угол наклона траектории, банк аэродинамических характеристик модели в зависимости от числа Маха и угла атаки, параметры модели - характерная площадь и длина, начальная масса и секундный расход топлива, числа Рейнольдса натурного изделия, закон изменения управляющего сигнала по углу крена согласно формулам (1 и 2),в привод элеронов(13)в канале угла крена в полете пересылают сигнал  .
.
В процессе ЛИ модели производят измерения текущих значений высоты, скорости полета, углов атаки и крена, температуры, давления (фиг. 4 поз. 15), по которым определяют параметры набегающего потока и по ним - значения коэффициента кинематической вязкости воздуха ν и числа М (фиг. 4 поз. 16). По формуле  вычисляют текущее значение числа Рейнольдса Reмод модели, сравнивают его с заданным программным значением Reизд, вычисляют значения производной
вычисляют текущее значение числа Рейнольдса Reмод модели, сравнивают его с заданным программным значением Reизд, вычисляют значения производной  от угла наклона траектории по времени (фиг. 4 поз. 16). В результате выполнения указанных процедур находят требуемые расчетные значения угла крена по формуле (1). На следующем такте БЦВМ вычисляют значение производной
от угла наклона траектории по времени (фиг. 4 поз. 16). В результате выполнения указанных процедур находят требуемые расчетные значения угла крена по формуле (1). На следующем такте БЦВМ вычисляют значение производной  и корректирующий сигнал
и корректирующий сигнал  (фиг. 4 поз. 12). Далее вычисляют суммарный управляющий сигнал
(фиг. 4 поз. 12). Далее вычисляют суммарный управляющий сигнал  , который поступает на электрогидравлический привод в канале управления креном (фиг. 4 поз. 13). При этом получается необходимая реализация траектории модели, для которой выполняется условие Reмод ≈ Reизд.
, который поступает на электрогидравлический привод в канале управления креном (фиг. 4 поз. 13). При этом получается необходимая реализация траектории модели, для которой выполняется условие Reмод ≈ Reизд.
Результаты исследования отражены на фиг. 1, где показаны изменения по числу М основных параметров модели и натурного изделия при использовании предложенного способа:
1 - требуемое скорректированное значение скоростного угла крена  ,
,
2 - углы атаки α модели и натурного изделия,
3 - высота полета Н,
4 - угол наклона траектории θ к плоскости местного горизонта,
5 - числа Рейнольдса Reизд натурного изделия (заданные),
6 - числа Рейнольдса Reмод модели, полученные в летных испытаниях, (скорректированные).
Полученные рассогласования по числам Рейнольдса ΔRe=Reмод-Reизд между экспериментальными и заданными значениями сравнивают с допустимыми для оценки погрешности. Систему управления дополняют корректирующим звеном для повышения качества переходных процессов, в частности, дифференцирующим звеном по сигналу рассогласования ΔRe с целью упреждения подачи сигнала. Такой подход может быть использован при построении алгоритмов по другим критериям подобия, требуемым при определении в летных испытаниях модели ЛА. Он позволяет использовать принципы построения замкнутых систем управления для нахождения траекторий полета моделей, удовлетворяющих критериям подобия с натурными изделиями, не прибегая к решению оптимальных задач. Система может быть дополнена другими корректирующими звеньями с целью повышения качества переходных процессов и повышения точности исполнения поступающей на вход команды, для этого вычисленное значение  корректируют с учетом сигнала упреждения, рассчитанного по формуле
корректируют с учетом сигнала упреждения, рассчитанного по формуле  с постоянной величиной ТRе.
с постоянной величиной ТRе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения управляющего сигнала по углу крена модели гиперзвукового летательного аппарата (ГЛА) для контроля аэродинамической идентичности по числам Рейнольдса траекторий полёта модели и натурного изделия при проведении опережающих лётных исследований | 2016 |
|
RU2615220C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАБЕГАЮЩЕГО ПОТОКА ЛЕТАТЕЛЬНОГО АППАРАТА В ПОЛЕТЕ НА РЕЖИМАХ ПЛАНИРОВАНИЯ С ГИПЕРЗВУКОВЫМИ ИЛИ ДОЗВУКОВЫМИ СКОРОСТЯМИ ДВИЖЕНИЯ | 1998 |
|
RU2135974C1 |
| СПОСОБ ИСПЫТАНИЯ МОДЕЛИ ГИПЕРЗВУКОВОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2813741C2 |
| Способ определения аэродинамического нагрева высокоскоростного летательного аппарата в опережающих лётных исследованиях на крупномасштабной модели | 2015 |
|
RU2616108C1 |
| Квазижесткая аэродинамическая модель несущей поверхности | 2023 |
|
RU2799101C1 |
| Квазижесткая аэродинамическая модель несущей поверхности | 2023 |
|
RU2799102C1 |
| АЭРОДИНАМИЧЕСКАЯ МОДЕЛЬ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРОВАННЫМ ВОЗДУШНО-РЕАКТИВНЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2370744C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ ГИПЕРЗВУКОВОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2347193C1 |
| Квазижесткая аэродинамическая модель несущей поверхности | 2023 |
|
RU2799100C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ЛЕТАТЕЛЬНОГО АППАРАТА ПО РЕЗУЛЬТАТАМ ЛЕТНОГО ЭКСПЕРИМЕНТА | 2022 |
|
RU2790358C1 |

Изобретение относится к способу формирования управляющего сигнала по углу крена модели гиперзвукового летательного аппарата (ГЛА). Для формирования управляющего сигнала для контроля аэродинамической идентичности по числам Рейнольдса траекторий полета модели и натурного изделия ГЛА при проведении опережающих летных исследований аэродинамических характеристик измеряют высоту, скорость полета, углы атаки и крена, температуру, давление, плотность атмосферы, вычисляют скоростной расчетный угол крена определенным образом, корректируют вычисленное значение с учетом рассчитанного определенным образом опережающего сигнала, находят требуемое скорректированное значение угла крена, необходимое при реализации переходного процесса для выхода на траекторию модели. Обеспечивается повышение точности идентификации аэродинамических характеристик по результатам летных испытаний. 5 ил.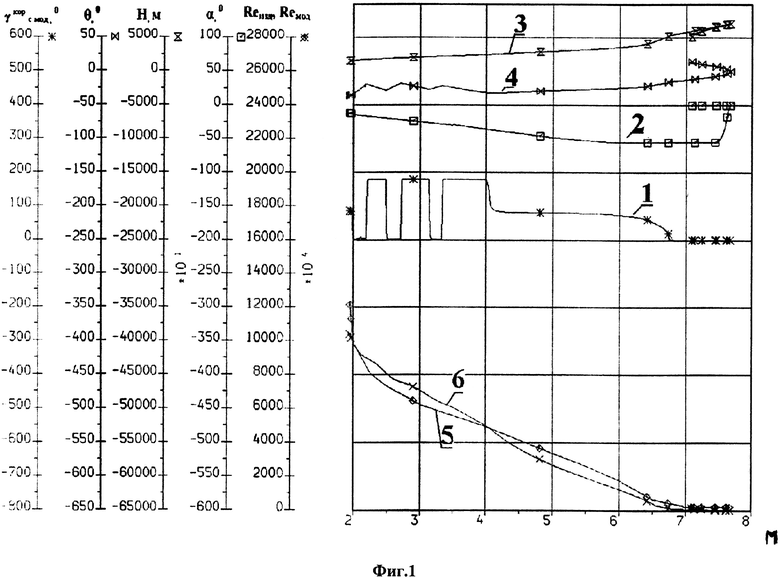
Способ формирования управляющего сигнала по углу крена модели гиперзвукового летательного аппарата (ГЛА) для контроля аэродинамической идентичности по числам Рейнольдса траекторий полета модели и натурного изделия при проведении опережающих летных исследований аэродинамических характеристик, включающий измерения высоты, скорости полета, углов атаки и крена, необходимые для контроля требования аэродинамической идентичности чисел Рейнольдса на траектории полета модели при тех же углах атаки в зависимости от чисел Маха, что и для натурного изделия, бортовые измерения температуры, давления, плотности атмосферы, вычисление скоростного расчетного угла крена по формуле

где γс - угол крена в скоростной системе координат (угол вращения),
θ - угол наклона траектории к плоскости местного горизонта,
V - скорость полета,
r=Rзем+Н,
Rзем - средний радиус Земли,
Н - высота полета,
g(H) - ускорение свободного падения на высоте Н,
Y=cy(α, М)⋅q⋅S - подъемная сила,
cy(α, М) - коэффициент подъемной силы,
α - угол атаки,
М - число Маха,
S - характерная площадь модели,
m - масса модели,
l - длина модели,
ν - коэффициент кинематической вязкости воздуха,
по которой непрерывно в процессе полета модели вычисляют углы крена 






необходимое при реализации переходного процесса для выхода на траекторию модели, на которой с большей точностью выполняется условие Reмод≈Reизд; при увеличении требуемого угла крена за пределы первой четверти в алгоритме управления организуется скользящий режим переключения относительно значения 
| Способ определения управляющего сигнала по углу крена модели гиперзвукового летательного аппарата (ГЛА) для контроля аэродинамической идентичности по числам Рейнольдса траекторий полёта модели и натурного изделия при проведении опережающих лётных исследований | 2016 |
|
RU2615220C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ ГИПЕРЗВУКОВОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2347193C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ВОЗДУШНЫХ СУДОВ | 2011 |
|
RU2460982C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2011 |
|
RU2466288C1 |
| US 20100256962 A1, 07.10.2010. | |||

