Изобретение относится к области техники вооружения, в частности к области управляемых ракет противотанковых ракетных комплексов (ПТРК) воздушного базирования.
При запуске с воздушного носителя управляемых ракет с отделяющимися элементами конструкции должны быть предприняты меры, исключающие столкновение отделившихся элементов конструкции ракеты с носителем.
Известен способ запуска противотанковой управляемой ракеты (ПТУР) Hellfire с помощью маршевого твердотопливного ракетного двигателя, который работает в течение 3 с, разгоняя ракету до скорости 500 м/с [Сборник научно-технической информации, Спецвыпуск. - Тула: ГУПКБП, 2005, с.5-26].
Известен также способ запуска ПТУР Spike с помощью двигательной установки, состоящей из двух двигателей: стартового (неотделяемого) двигателя и разгонно-маршевого двигателя. Стартовый двигатель (СД) обеспечивает выход ракеты из транспортно-пускового контейнера (ТПК) со скоростью 25 м/с. Затем включается маршевый двигатель, разгоняет ракету до скорости 180 м/с, после чего тяга двигателя снижается до величины, достаточной для сохранения скорости полета [Сборник научно-технической информации, №3(13) - Тула: ГУПКБП, 2005, с.24-58, с.62-76].
При этих способах запуска ракета не имеет отделяющихся элементов конструкции и не требуется применение специальных мер, призванных обезопасить носитель от отделяющихся частей ракеты.
Наиболее близким к предлагаемому является способ запуска управляемой ракеты Mistral 1/2 (АТАМ), двигательная установка которой состоит из отделяющегося СД и маршевого двигателя. Ракета, находящаяся в ТПК, установленном на пусковой установке воздушного носителя, запускается с помощью СД, который за время движения ракеты по ТПК сообщает ей начальную скорость 40 м/с и через 0,4 с после выхода из контейнера отделяется от ракеты, неуправляемой на стартовом участке траектории полета, и падает вниз. После чего включается маршевый двигатель и разгоняет ракету до скорости 850 м/с. [Jane's Air-Launched Weapons, 2005 March, ISSUE 45, р.13-14].
Стартовый двигатель, отделившийся от ракеты Mistral 1/2 (АТАМ), летящей с дозвуковой скоростью, представляет собой неоперенное тело вращения малого удлинения (λ<2) с большим коэффициентом сопротивления и практически нулевой подъемной силой. Под действием силы тяжести отделившийся СД падает вниз, и его траектория движения проходит ниже носителя, который продолжает сохранять направление полета, предшествующее пуску ракеты, или выполняет вертикальный маневр. Следовательно, и в этом наиболее близком к предлагаемому способу запуска ракеты с воздушного носителя нет необходимости предусматривать специальные меры, исключающие столкновение носителя с отделившейся стартовой ступенью.
Задачей предлагаемого изобретения является создание безопасного способа запуска с воздушного носителя противотанковой двухступенчатой управляемой ракеты с дальностью поражения цели более 20 км, управление которой осуществляется сразу после ее выхода из ТПК, а стартовый двигатель отделяется после того, как разгоняет ракету до максимальной скорости.
Для решения указанной задачи в предлагаемом способе запуска двухступенчатой управляемой ракеты с воздушного носителя, включающем пуск ракеты с помощью стартового двигателя из транспортно-пускового контейнера (ТПК), размещенного на пусковой установке, разделение ступеней ракеты после окончания работы стартового двигателя, баллистический полет стартовой ступени и управляемый полет маршевой ступени, управление ракетой осуществляют с момента ее выхода из ТПК, отделение стартовой ступени, выполненной в виде аэродинамически устойчивого оперенного тела вращения, производят после достижения ракетой максимальной скорости полета, а ТПК перед пуском ракеты поворачивают на угол, заранее рассчитанный для конкретных режимов полета носителя по данным о характере управления ракетой и известным аэродинамическим характеристикам ракеты и стартовой ступени, при котором вся совокупность возможных траекторий отделившейся стартовой ступени проходит ниже высоты полета носителя.
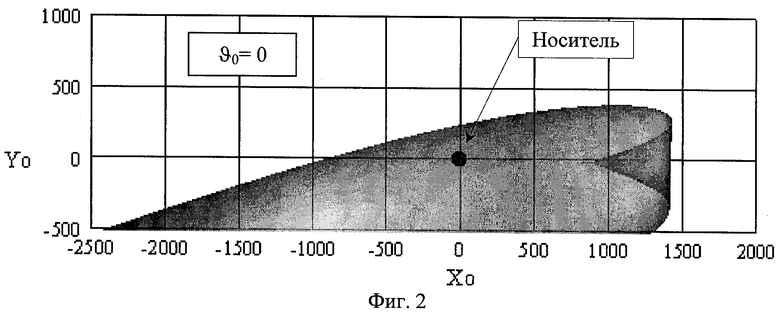
Изобретение поясняется графическим материалом, где на фиг.1 показан внешний вид стартовой ступени: позиция 1 - корпус двигателя, позиция 2 - блок стабилизатора. На фиг.2 приведена область возможных траекторий полета стартовой ступени относительно носителя для носителя, летящего со скоростью 300 м/с на высоте 500 м при угле пуска ракеты ϑ0, превышающем допустимую величину ϑдоп. На фиг.3 для тех же условий полета носителя приведена область возможных траекторий полета стартовой ступени при угле пуска ракеты ϑ0 меньше допустимого ϑдоп. На фиг.4 для носителя, летящего со скоростью 300 м/с на высоте 500 м, приведены возможные координаты Yo, Zo стартовой ступени относительно носителя, зафиксированные в момент прохождения стартовой ступенью вертикальной плоскости, проходящей через начало связанной системы координат носителя. На фиг.5 для того же режима полета носителя приведена траектория полета стартовой ступени относительно носителя при угле пуска ракеты ϑ0, превышающем допустимую величину ϑдоп. На фиг.6-7 показана зависимость траекторий движения стартовой ступени относительно носителя от скорости Vn и высоты Yn полета носителя при постоянном угле пуска ракеты ϑ0. На фиг.8 представлен график изолиний ϑдоп в функции скорости Vn и высоты Yn полета носителя.
Способ осуществляется следующим образом. На этапе проектирования для выбранного способа управления ракетой, для рабочего диапазона скоростей Vn и высот Yn полета носителя, для заданного режима полета носителя (горизонтальный полет, пикирование, кабрирование) вычисляются значения допустимых углов пуска ракеты ϑдоп=ϑn+ϑпк, где ϑn - угол тангажа носителя, ϑпк - угол поворота транспортно-пускового контейнера относительно продольной оси ОХn, связанной системы координат носителя, и заносятся в бортовую вычислительную систему (БВС) носителя в виде двумерного массива ϑдоп=ϑдоп(Yn, Yn). Допустимыми ϑдоп считаются те углы, при которых все возможные траектории отделившейся стартовой ступени проходят ниже высоты полета носителя на заданном расстоянии ΔLдоп.
При обнаружении цели БВС сравнивает значение угла пуска ϑ0=ϑn+ϑпк, необходимого для вывода ракеты на траекторию, обеспечивающую поражение цели, с допустимым ϑдоп для текущих условий полета носителя и, в случае выполнения условия ϑ0≤ϑдоп, дает разрешение на запуск ракеты.
Траектория движения отделившейся стартовой ступени относительно носителя зависит от скорости и высоты полета носителя, а также от начальных возмущений, которые получает стартовая ступень после разделения ступеней ракеты. Известно, что основным возмущающим фактором, влияющим на траекторию отделившейся стартовой ступени, является угловая скорость ω оси ракеты относительно поперечных осей [Известия ТулГУ, Сер. «Проблемы специального машиностроения», Вып.8 - Тула: ТулГУ, 2005, с.45-49]. В том случае, когда механизм разделения не создает дополнительных возмущений разделяющимся ступеням ракеты, величина и направление угловой скорости ω оси ракеты определяются характером управляемого движения перед разделением. При полете с постоянной или плавно меняющейся командой угловая скорость ω оси ракеты относительно поперечных осей практически равна нулю. Если на ракету мгновенно подается команда, обнуляется действующая команда или изменяется знак команды, то ось ракеты начинает колебаться вокруг центра масс с угловой скоростью ω. Составляющие максимальной угловой скорости ω по осям OY, OZ связанной системы координат ракеты равны: ωу max=kmax·αбал·2π·f0, ωz max=kmax·βбал·2π·f0, где kmax - коэффициент заброса при изменении знака команды; αбал - балансировочный угол атаки, βбал - балансировочный угол скольжения, f0 - собственная частота ракеты. При максимальной угловой скорости ракеты относительно поперечной оси угол атаки (скольжения) близок к нулю.
В общем случае перед разделением ступеней ракеты угловая скорость ее оси может иметь любое значение в диапазоне ±ωmax.
Траектория полета отделившейся стартовой ступени относительно носителя определяется в процессе решения системы уравнений движения летательного аппарата [А.А.Лебедев, Л.С.Чернобровкин. Динамика полета беспилотных летательных аппаратов. - М., Машиностроение, 1973, с.467, уравнения с 1 по 12 системы уравнений (11.1) и С.А.Горбатенко, Э.М.Макашов, Ю.Ф.Полушкин, Л.В.Шефтель. Механика полета. - М., Машиностроение, 1969, с.193, уравнения (4.135)] совместно с уравнениями движения носителя.
Выполняя вычисления во всем возможном диапазоне значений ±ωmax, получаем область возможных траекторий стартовой ступени относительно носителя. Если угол пуска ракеты превышает допустимую величину, то возможен случай, когда, по меньшей мере, одна из траекторий стартовой ступени пройдет через носитель.
Следовательно, для того чтобы исключить возможность столкновения носителя со стартовой ступенью, угол пуска ракеты должен быть таким, чтобы все возможные траектории полета стартовой ступени относительно носителя при любом возможном значении угловой скорости ω оси ракеты в диапазоне от минус ωmax до плюс ωmax проходили ниже носителя.
Моделированием траектории движения отделившейся стартовой ступени относительно носителя при максимальных значениях угловой скорости ω и различных углах пуска ϑ0 определяется та допустимая величина угла пуска ϑдоп, при которой траектории отделившейся стартовой ступени пройдут мимо носителя при любом возможном значении угловой скорости оси ракеты в момент разделения ступеней.
Пример 1
Носитель летит равномерно прямолинейно в режиме горизонтального полета со скоростью Vn, без крена и скольжения на постоянной высоте Yn с углом тангажа ϑn. Диапазон изменения скорости полета носителя от 150 до 300 м/с. Диапазон изменения высоты полета носителя от 0 до 5000 м над уровнем моря. Зависимость угла тангажа ϑn носителя от скорости и высоты полета приведена в таблице 1.
Пусковая установка с ТПК может поворачиваться в вертикальной плоскости носителя относительно его продольной оси ОХn на угол ϑпк в диапазоне от 0 до минус 12°. При ϑпк=0° ось ТПК параллельна продольной оси носителя ОХn.
Угол тангажа носителя ϑn, град
В ТПК находится двухступенчатая осесимметричная ракета схемы «утка» с двухканальной системой управления, вращающаяся во время полета по крену за счет косо поставленного оперения.
В зависимости от угла поворота ПУ угол пуска ракеты ϑ0=ϑn+ϑпк может изменяться от 10,8° при ϑпк=0° (Vn=150 м/с, Yn=5000 м, ϑn=10,8°) до минус 10° при ϑпк=12°(Vn=300 м/с, Yn=0 м, ϑn=2,0°).
После начала работы стартового двигателя (t=0 с) под действием тяги стартового двигателя ракета перемещается по нарезам контейнера и к моменту tcx выхода из контейнера (tcx=0,2 с) получает продольную скорость Vcx, равную 30 м/с, и угловую скорость крена ωх, равную 5 об/с.
После выхода ракеты из контейнера автономная система управления ракеты стабилизирует ее траекторию относительно заданного направления стрельбы и к моменту разделения угол ϑр тангажа ракеты равен углу пуска ϑ0.
В зависимости от скорости и высоты полета носителя над уровнем моря скорость ракеты перед разделением соответствует числам Маха от 3,0 до 4,5. Значения балансировочного угла атаки αбал и собственной частоты ракеты f0 для различных чисел Маха и высот над уровнем моря приведены в таблице 2. Здесь же представлены значения максимальной угловой скорости оси ракеты ωmax=kmax·αбал·2π·f0 при коэффициенте заброса ракеты kmax=2.
В общем случае при разделении ступеней ракеты угловая скорость ее оси в канале отклонения рулей может иметь любое значение в диапазоне ±ωmax. При ω=ωmax угол атаки не превышает αбал.
Для расчета траектории движения отделившейся стартовой ступени используем приведенную ниже аэробаллистическую модель.
Аэробаллистическая модель движения стартовой ступени
1. Уравнения движения стартовой ступени
Динамические уравнения движения центра масс СС:



Кинематические уравнения движения центра масс СС:


Динамические уравнения вращательного движения СС вокруг центра масс:



Кинематические уравнения вращения СС вокруг центра масс:


Значения углов αт, βт и γа определяются из следующих уравнений:



При безветрии воздушная скорость СС V равна земной скорости СС Yк, а углы атаки α, скольжения β равны, соответственно, траекторному углу атаки αт и траекторному углу скольжения βт. При наличии ветра и известных проекциях скорости ветра Wx, Wy, Wz на оси местной географической системы координат, воздушная скорость и углы атаки, скольжения СС определяются по зависимостям:



2. Аэродинамические силы и моменты, действующие на стартовую ступень
Составляющие аэродинамических сил и моментов в проекциях на оси, связанной с фюзеляжем системы координат OXYZ, продольная ось ОХ которой направлена вдоль оси фюзеляжа, определяются по формулам:
Х=-Cx·q·Sx,
Y=Cy·q·Sx,
Z=-Cz·q·Sx,
Mx=mx·q·Sx·Lx,
My=my·q·Sx·Lx,
Mz=mz·q·Sx·Lx,
где  ρ - плотность воздуха; V - скорость стартовой ступени;
ρ - плотность воздуха; V - скорость стартовой ступени;
Sx - характерная площадь. Sx=0,0133 м2;
Lx - характерная длина. Lx=1 м;
Сх, Су, Cz - коэффициенты составляющих аэродинамической силы (продольной, нормальной и поперечной, соответственно) по осям связанной системы координат OXYZ;
mx, my, mz - коэффициенты составляющих аэродинамического момента по осям связанной системы координат OXYZ.
Коэффициент сопротивления Сх вычисляется по формуле:
Значения коэффициентов СхСС и ηM в функции числа М приведены в таблице 3.
FфСС=π·DфСС·LФсс.
Dф CC - диаметр фюзеляжа стартовой ступени. Dф CC=0,170 м;
Lф CC - длина фюзеляжа стартовой ступени. Lф CC=1,454 м.
Δ(2сf)M=0=(2 сf)M=0(Н)-(2 сf)M=0(Н=0).
Значения коэффициентов (2сf)M=0 в функции числа Рейнольдса (Re) приведены в таблице 4, число Re вычисляется по формуле: 
ν - кинематическая вязкость воздуха. Значения ν в функции высоты над уровнем моря Н приведены в таблице 5.
Коэффициенты нормальной Cy и поперечной Сz силы равны:
Cу=Су ф+Су ст,
Cz=Cz ф+Сz ст.
Коэффициенты нормальной и поперечной силы фюзеляжа стартовой ступени:


Значения Сn ф CC (М,α) и Сn ф CC (М,β) приведены в таблице 6; α и β - углы атаки и скольжения, град; 
Коэффициенты нормальной и поперечной силы стабилизатора:


Значения Сn ст(М,α) и Сn ст(М,β) в функции числа Маха и угла атаки стабилизатора приведены в таблице 8. 
Значения коэффициентов интерференции стабилизатора Кα ст приведены в таблице 10.
Коэффициенты момента крена:

δст - угол установки консолей стабилизатора δст=0,25°.
Значения производных коэффициентов момента крена 
 в функции числа Маха приведены в таблице 11.
в функции числа Маха приведены в таблице 11.
Относительная угловая скорость крена  равна:
равна:
 где ωх - угловая скорость крена, рад/с.
где ωх - угловая скорость крена, рад/с.
Коэффициенты моментов рыскания и тангажа:
mу=mуф+mу ст,
mz=mz ф+mz ст.
Коэффициенты моментов рыскания и тангажа фюзеляжа стартовой ступени:

Хт - положение центра тяжести стартовой ступени. xт=0,812 м.
Координаты точек приложения поперечной и нормальной силы xdz ф, xdy ф, определяются по зависимостям:


Значения относительного центра давления фюзеляжа стартовой ступени  и
и  приведены в таблице 7.
приведены в таблице 7.
Коэффициенты демпфирующих моментов mу ф(ωу) и mz ф(ωz) вычисляются по формулам:


Здесь (Сz ф)*=(Су ф)*=Су ф(М,α=1°),

ωу, ωz - проекции вектора угловой скорости стартовой ступени на оси OY, OZ связанной системы координат, 1/рад.
Коэффициенты моментов рыскания и тангажа стабилизатора:


Координаты точек приложения сил хdу ст и хdz ст:


хст - расстояние от носка ракеты до бортовой хорды стабилизатора. хст=1,279 м,
bб ст - длина бортовой хорды стабилизатора. bб ст=0,15 м. Значения центра давления стабилизатора  приведены в таблице 9.
приведены в таблице 9.
Коэффициенты демпфирующих моментов mу ст(ωу) и mz ст(ωz) равны:


Здесь (Cz ст)*=(Су ст)*=Су ст(М,α=1°).
3. Начальные условия
Механизм разделения ступеней ракеты не создает разделяющимся ступеням дополнительных возмущений, поэтому начальные условия движения СС (VCC 0, θСС 0, ΨСС 0, хСС 0, уСС 0, zСС 0, ωx СС 0, ωу СС 0,ωz CC 0, ϑCC 0, ψCC 0, γCC 0) практически равны тем значениям параметров движения, которые имела ракета перед разделением. Проекции угла вектора скорости отделившейся СС изменяются на величину 

где Vp - скорость ракеты перед разделением, Vy CC=Δхт·ωz, Vz CC =Δхт·ωу, Δхт - расстояние между центрами масс ракеты и СС перед разделением (Δхт=1.284 м), ωz, ωу - коэффициенты моментов рыскания и тангажа ракеты перед разделением.
4. Исходные данные
Удвоенный коэффициент трения плоской пластины
Кинематическая вязкость воздуха
Коэффициенты Сn ф СС(М,α) нормальной силы фюзеляжа СС
Если β=α, то Сn ф CC(М,β)=Сn ф CC(М,α)
Cn ф СС((М,(α<0))=-Сn ф CC(М,(α>0))
0.6
0.7
0.8
0.9
1.0
1.1
1.2
1.3
1.7
2.0
2.5
3.0
4.0
5.0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0.131
0.131
0.131
0.132
0.137
0.144
0.147
0.150
0.157
0.164
0.171
0.176
0.176
0.169
0.281
0.282
0.283
0.285
0.295
0.307
0.315
0.319
0.336
0.349
0.364
0.375
0.379
0.374
0.451
0.452
0.454
0.457
0.472
0.492
0.503
0.511
0.538
0.559
0.588
0.613
0.665
0.704
0.640
0.642
0.646
0.651
0.672
0.699
0.715
0.726
0.769
0.804
0.868
0.961
1.084
1.093
0.848
0.853
0.860
0.868
0.895
0.929
0.952
0.971
1.038
1.114
1.297
1.452
1.538
1.511
1.078
1.086
1.095
1.107
1.143
1.192
1.225
1.251
1.390
1.575
1.854
1.981
2.021
1.962
1.327
1.339
1.353
1.376
1.427
1.488
1.532
1.582
1.897
2.186
2.442
2.537
2.530
2.447
1.596
1.613
1.642
1.678
1.742
1.822
1.917
2.014
2.556
2.856
3.057
3.121
3.071
2.985
1.884
1.918
1.962
2.010
2.106
2.252
2.418
2.595
3.286
3.532
3.693
3.720
3.646
3.538
2.195
2.252
2.311
2.391
2.561
2.811
3.069
3.343
4.031
4.238
4.346
4.350
4.270
4.111
23.307
24.365
24.717
24.542
24.369
24.108
23.845
23.758
22.934
22.443
22.446
22.448
22.447
22.442
Положение центра давления  фюзеляжа СС в долях длины фюзеляжа
фюзеляжа СС в долях длины фюзеляжа
Отсчитывается от носка корпуса
Если β=α, то 

0,6
0,7
0,8
0,9
1,0
1,1
1,2
1,3
1,7
2,0
2,5
3,0
4,0
5,0
0,118
0,119
0,119
0,121
0,124
0,129
0,131
0,134
0,144
0,153
0,169
0,186
0,216
0,234
0,135
0,136
0,136
0,138
0,140
0,144
0,146
0,148
0,157
0,166
0,181
0,197
0,226
0,245
0,166
0,166
0,167
0,168
0,169
0,172
0,173
0,175
0,183
0,191
0,205
0,221
0,251
0,276
0,193
0,193
0,194
0,195
0,196
0,197
0,198
0,200
0,208
0,215
0,231
0,249
0,297
0,334
0,217
0,217
0,218
0,220
0,220
0,222
0,222
0,224
0,233
0,242
0,264
0,297
0,345
0,366
0,238
0,240
0,241
0,243
0,243
0,244
0,245
0,248
0,259
0,275
0,313
0,343
0,371
0,386
0,258
0,260
0,262
0,264
0,265
0,267
0,268
0,272
0,292
0,319
0,354
0,370
0,389
0,400
0,277
0,279
0,281
0,284
0,286
0,288
0,290
0,296
0,333
0,359
0,379
0,389
0,402
0,412
0,294
0,296
0,300
0,305
0,307
0,309
0,316
0,326
0,369
0,386
0,396
0,402
0,413
0,423
0,310
0,314
0,319
0,323
0,327
0,334
0,345
0,358
0,394
0,403
0,409
0,413
0,422
0,431
0,325
0,330
0,335
0,342
0,350
0,362
0,374
0,387
0,412
0,417
0,420
0,422
0,431
0,439
0,553
0,553
0,553
0,553
0,553
0,553
0,553
0,553
0,553
0,553
0,553
0,553
0,553
0,553
Коэффициенты Сn ст(М,α) нормальной силы изолированного стабилизатора
Отнесены к площади двух консолей стабилизатора
Если β=α, то Сn ст(М,β)=Сn ст (М,α)
Сn ст(М,(α<0))=-Сn ст М,(α>0))
Положение  центра давления стабилизатора в долях бортовой хорды.
центра давления стабилизатора в долях бортовой хорды.
Отсчитывается от начала передней кромки стабилизатора.
Если β=α, то

град
Коэффициенты момента крена , l/град
, l/град , l/рад, 1/град, 1/рад
, l/рад, 1/град, 1/рад
Решая приведенную выше систему уравнений движения стартовой ступени, определяем ее координаты х, у и z в стартовой системе координат, положение которой относительно земли зафиксировано в момент начала работа стартового двигателя, а начало находится в центре масс ракеты в ТПК.
При равномерном прямолинейном полете носителя его координаты в момент времени t в стартовой системе координат в общем случае определяются по зависимостям:
xn=Vn·(t-tcx)·cosθ·cosΨn;
yn=Vn·(t-tcx)·sinθn;
zn=-Vn·(t-tcx)·cosθn·sinΨn.
В рассматриваемом примере носитель находится в режиме горизонтального полета и после пуска ракеты не меняет направление полета. В этом случае θn=Ψn=0 и в стартовой системе координат в момент времени t
xn=Vn·(t-tcx);
уn=zn=0.
Координаты ракеты относительно носителя в момент времени t равны:
xO=x-xn;
уо=y-yn;
zo=z-zn.
Введем понятие «критерия безопасности» - минимального допустимого расстояния между носителем и отделившейся стартовой ступенью
Зададим значение «критерия безопасности» равным 100 м.
ϑдоп, град
Вычисляя траектории полета отделившейся стартовой ступени относительно носителя при различных значениях угла пуска ракеты ϑ0, определяем то минимальное значение - допустимый угол пуска ϑдоп - при котором вся совокупность возможных траекторий проходит ниже носителя на расстоянии Lo≥Lmin.
Результаты расчета приведены в таблице 12.
Значения ϑдоп=ϑдоп(Vn, Yn) вводятся в бортовую вычислительную систему носителя, которая дает разрешение на запуск ракеты, если требуемый угол пуска не превышает допустимый.
Пример 2
Для носителя и ракеты из примера 1 рассмотрим частный случай.
Носитель летит равномерно прямолинейно в режиме горизонтального полета без крена и скольжения. Vn=300 м/с, Yn=500 м, ϑn=2,1°.
Перед носителем находятся две цели.
Для поражения первой цели ракету нужно запустить под углом ϑ0=ϑn+ϑпк=0°, для поражения второй цели - под углом ϑ0=ϑn+ϑпк=-6,5°.
Исходя из условий безопасности, угол пуска ракеты при Vn=300 м/с, Yn=500 м не должен превышать ϑдоп=-4,6° (таблица 12). Следовательно, ракета должна быть запущена по второй цели.
Посмотрим, что может произойти, если ракета будет запущена по первой цели под углом пуска ϑ0=0°.
В момент разделения ступеней параметры движения ракеты следующие: V=1305 м/с (М=3,82), θ=-0,9°, Ψ=0, х=1323 м, у=-11 м, z=0, ωх=10,5 об/с, ωу=0, ωz=2,34 рад/с, ϑ=0, ψ=0, γ=-2,5°).
Отделившаяся стартовая ступень имеет те же начальные параметры движения, что ракета перед разделением, за исключением проекций угла вектора скорости, которые изменятся на величину

Решая приведенную выше систему уравнений движения, получаем траекторию полета стартовой ступени относительно носителя, которая в координатах xo,  sign(lo)=sign(yo) приведена на фиг.5. При xо=0 расстояние lо между носителем и стартовой ступенью равно нулю: происходит столкновение носителя со стартовой ступенью.
sign(lo)=sign(yo) приведена на фиг.5. При xо=0 расстояние lо между носителем и стартовой ступенью равно нулю: происходит столкновение носителя со стартовой ступенью.
Попутно заметим, что в момент разделения ступеней ракета может иметь любые значения угловых скоростей ωу, ωz в диапазоне от минус 3,54 рад/с до плюс 3,54 рад/с (таблица 2), а угол крена ракеты γ - любое значение в диапазоне от 0 до 360°. Координаты стартовой ступени относительно носителя в момент прохождения стартовой ступенью вертикальной плоскости, проходящей через начало связанной системы координат носителя, при ωу=ωz=3,54 рад/с для значений γ от 0 до 360° приведены на фиг.4. Здесь же приведен график для варианта ωу=0, ωz=2,34 рад/с и γ от 0 до 360°.
Из рисунка видно, что при запуске ракеты под углом ϑ0, величина которого превышает ϑдоп, найдется по меньшей мере одна траектория полета стартовой ступени, проходящая через носитель.
При запуске ракеты по второй цели под углом ϑ0=ϑn+ϑпу=-6,5°, величина которого меньше ϑдоп=-4,6°, все возможные траектории полета стартовой ступени пройдут ниже носителя (фиг.3, 4).
Конструкция ракеты, реализующей этот способ, подобна той, которая входит в состав многоцелевого ракетного комплекса «Гермес», представленного на выставке IDEX-2005 [Рынки вооружений, АРМС-ТАСС, 2005, №1-2, с.6-9]. В этой конструкции управление ракетой осуществляется сразу же после выхода ракеты из ТПК, а стартовый двигатель отделяется после того, как разгоняет ракету до максимальной скорости. У таких ракет стартовая ступень, отделяющаяся после окончания работы стартового двигателя, представляет собой аэродинамически устойчивое оперенное тело вращения большого удлинения. Аналогичная конструкция стартовой ступени описана в изобретении RU 2202761. Механизм разделения ступеней, конструкция которого подобна описанной в изобретении RU 2233424, не создает дополнительных возмущений разделяющимся ступеням ракеты.
Представленный способ пуска двухступенчатой управляемой ракеты с воздушного носителя позволяет исключить столкновение отделившейся стартовой ступени с носителем при любых возможных управляющих командах в момент разделения ступеней ракеты.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОСМИЧЕСКИЙ РАКЕТНЫЙ КОМПЛЕКС И СПОСОБ ОБЕСПЕЧЕНИЯ УСЛУГ ПО ЗАПУСКУ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ КОСМИЧЕСКОГО РАКЕТНОГО КОМПЛЕКСА | 2001 |
|
RU2179941C1 |
| Двухсистемная управляемая ракета в транспортно-пусковом контейнере | 2023 |
|
RU2814065C1 |
| СПОСОБ ВЫВОДА ПОЛЕЗНОГО ГРУЗА В ОКОЛОЗЕМНОЕ ПРОСТРАНСТВО | 1994 |
|
RU2078010C1 |
| РАКЕТА С ПОДВОДНЫМ СТАРТОМ | 2007 |
|
RU2352894C1 |
| РАКЕТА КОСМИЧЕСКОГО НАЗНАЧЕНИЯ | 1992 |
|
RU2025645C1 |
| АЭРОСТАТНЫЙ РАКЕТНО-КОСМИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2682893C1 |
| СПОСОБ СКРЫТНОГО ПЕРЕМЕЩЕНИЯ ПОД ВОДОЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И ВЫХОДА ЕГО НА СТАРТОВУЮ ПОЗИЦИЮ | 2015 |
|
RU2613632C2 |
| СПОСОБ ЗАПУСКА НЕУПРАВЛЯЕМОЙ РАКЕТЫ С РЕАКТИВНЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2403533C1 |
| СПОСОБ СТРЕЛЬБЫ ЗЕНИТНОЙ УПРАВЛЯЕМОЙ РАКЕТОЙ И РАКЕТА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2191985C2 |
| СПОСОБ ПОДГОТОВКИ СТАРТОВОЙ ПЛОЩАДКИ ДЛЯ ЗАПУСКА РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ И НАЗЕМНОЕ ОБОРУДОВАНИЕ ДЛЯ ОСУЩЕСТВЛЕНИЯ ЗАПУСКА | 1994 |
|
RU2094337C1 |






Изобретение относится к области техники вооружения, в частности к управляемым ракетам противотанковых ракетных комплексов (ПТРК) воздушного базирования. Способ включает пуск ракеты с помощью стартового двигателя из транспортно-пускового контейнера (ТПК), размещенного на пусковой установке воздушного носителя. После окончания работы стартового двигателя происходит отделение стартовой ступени ракеты, баллистический полет стартовой ступени и управляемый полет маршевой ступени. Управление ракетой осуществляют с момента ее выхода из ТПК. Стартовую ступень используют в виде аэродинамически устойчивого оперенного тела вращения. Отделение стартовой ступени производят после достижения ракетой скорости полета, соответствующей числам Маха 3,0-4,5. ТПК перед пуском ракеты поворачивают на угол, при котором все возможные траектории отделившейся стартовой ступени проходят ниже высоты полета носителя. Изобретение обеспечивает исключение столкновения воздушного носителя с отделившейся стартовой ступенью. 8 ил., 12 табл.
Способ запуска двухступенчатой управляемой ракеты с воздушного носителя, включающий пуск ракеты с помощью стартового двигателя из транспортно-пускового контейнера (ТПК), размещенного на пусковой установке воздушного носителя, отделение стартовой ступени ракеты после окончания работы стартового двигателя, баллистический полет стартовой ступени и управляемый полет маршевой ступени, отличающийся тем, что осуществляют управление ракетой с момента ее выхода из ТПК, используют стартовую ступень в виде аэродинамически устойчивого оперенного тела вращения, а отделение стартовой ступени производят после достижения ракетой скорости полета, соответствующей числам Маха 3,0-4,5, при этом ТПК перед пуском ракеты поворачивают на угол, при котором все возможные траектории отделившейся стартовой ступени проходят ниже высоты полета носителя.
| Jane"s Air-Launched Weapons | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| РАКЕТА-НОСИТЕЛЬ, СБРАСЫВАЕМАЯ С САМОЛЕТА-НОСИТЕЛЯ, И СПОСОБ ЕЕ ЗАПУСКА В ВОЗДУХЕ И УПРАВЛЕНИЕ ПОЛЕТОМ | 1989 |
|
RU2026798C1 |
| RU 2002127542 A1, 10.04.2004 | |||
| БРОНЕВОЙ ЭЛЕМЕНТ | 1999 |
|
RU2169335C2 |
| RU 2004108493 A1, 20.09.2005 | |||
| DE 10028753 A, 04.01.2001. | |||

