Изобретение относится к информационно-измерительной технике и может быть использовано для сбора и регистрации полетных данных (параметрической, звуковой, видеоинформации), сохранения этой информации в случае летных происшествий (в том числе над водной поверхностью), а также для эксплуатационного контроля авиационных систем и оборудования.
Известно техническое решение «Система регистрации данных» патент РФ №2427802, МПК G01D 9/00, опубл. 27.08.2011 г.
Устройство содержит блок сбора и обработки информации, который состоит из модуля сбора и преобразования информации, модуля контроля и модуля обработки полетной информации, соединенных между собой по внутренней шине блока сбора и обработки информации, и имеет информационные входы-выходы для подключения к датчикам и системам контролируемого объекта, эксплуатационный бортовой накопитель, защищенный бортовой накопитель, который состоит из защищенного накопителя, контроллера защищенного накопителя и модуля обработки звуковой информации, соединенных между собой по внутренней шине защищенного бортового накопителя, соединенного с блоком сбора и обработки информации, причем блок сбора и обработки информации соединен двунаправленной связью по последовательному коду с эксплуатационным бортовым накопителем, кроме того, блок сбора и обработки информации, эксплуатационный бортовой накопитель и защищенный бортовой накопитель снабжены модулями суммарной наработки, подключенными к внутренним шинам соответствующих блоков.
Недостатком устройства являются ограниченные функциональные возможности ввиду отсутствия регистрации видеоинформации, невозможность регистрации информации при пропадании бортового питания, что влечет недостаточную объективность при расследовании летных происшествий, а также невысокая надежность системы, обусловленная применением электрической кабельной сети между блоками системы, невозможность поиска аварийного регистратора при авиационном происшествии над водной поверхностью.
Технический результат предлагаемого изобретения заключается в расширении функциональных возможностей системы за счет обеспечения резервного питания, резервирования канала передачи полетной информации, осуществления мониторинга состояния информационного канала самолетных систем с составлением отчета, увеличение пропускной способности межблочного обмена и повышение уровня электромагнитной совместимости.
Технический результат достигается тем, что бортовая система контроля и регистрации полетной информации содержит защищенный бортовой накопитель ЗБН, который состоит из модуля питания, вычислительного модуля, контроллера защищенного накопителя и защищенного накопителя; сохраняемый защищенный бортовой накопитель СЗБН, который состоит из модуля питания, вычислительного модуля, контроллера защищенного накопителя и сохраняемого модуля памяти, состоящего из защищенного накопителя и модуля аварийного радиомаяка с модулем GPS/ГЛОНАСС, предназначенного для передачи информации о месте нахождения блока в систему КОСПАС-САРСАТ; эксплуатационный бортовой накопитель ЭБН, который состоит из модуля питания, вычислительного модуля, контроллера съемного накопителя информации и съемного накопителя информации; спасаемый бортовой накопитель СБН, который состоит из модуля питания, вычислительного модуля и модуля внутренней памяти; блока сбора звуковой и видеоинформации БЗВИ, который состоит из модуля питания, модуля вычислительного, модуля обработки аудиоинформации, модуля обработки видеоинформации, модуля коммутатора каналов Ethernet, соединенных между собой по каналу Ethernet через модуль коммутатора каналов Ethernet, входящего в состав блока БЗВИ. Каждый из блоков: БЗВИ, ЗБН, СЗБН, ЭБН, подключен по шине AFDX к коммутатору бортовой вычислительной сети летательного аппарата. Система включает в себя резервные источники питания РИП, которые подключены к каждому блоку системы (за исключением СБН): к блокам ЗБН, СЗБН, ЭБН по одному блоку РИП, а к блоку БЗВИ 3 блока РИП. В состав системы входят видеокамеры, которые подключены к блоку БЗВИ и каждая из которых связана с ним через один канал ARINC 818. В состав системы входят микрофоны, которые подключены к блоку БВИ и предназначены для передачи звуковой обстановки в кабине экипажа. К блоку БЗВИ подключены каналы от многофункциональных индикаторов (МФИ), предназначенные для передачи в блок БЗВИ видеоинформации, отображающейся на этих МФИ. Выход блока БЗВИ соединен с входом блока СБН для обеспечения питанием блока СБН, а также взаимосвязи по каналу Ethernet. Блок СБН подключен к блоку БЗВИ при помощи отрывного соединителя, который обеспечивает возможность катапультироваться блоку СБН вместе с летчиком. Остальные блоки системы, включая блок БЗВИ, подключены к общей шине питания летательного аппарата через резервные источники питания РИП. К блоку БЗВИ подключены информационные входы, предназначенные для приема информации от бортового оборудования. В состав системы входит датчик аварии, который подключен к каждому блоку системы и предназначен для формирования сигнала «Авария» при ударе, произошедшем, например, при авиационном происшествии.
Далее по тексту используются следующие сокращения:
БЗВИ - блок сбора звуковой и видеоинформации
ЗБН - защищенный бортовой накопитель
СЗБН - сохраняемый защищенный бортовой накопитель
ЭБН - эксплуатационный бортовой накопитель
СБН - спасаемый бортовой накопитель
РИП - резервный источник питания
МФИ - многофункциональные индикаторы
БО - бортовое оборудование
СЭС - система электроснабжения самолета
АП - авиационное происшествие
СПУ - самолетные переговорные устройства
БВС - бортовая вычислительная сеть
ЛА - летательный аппарат
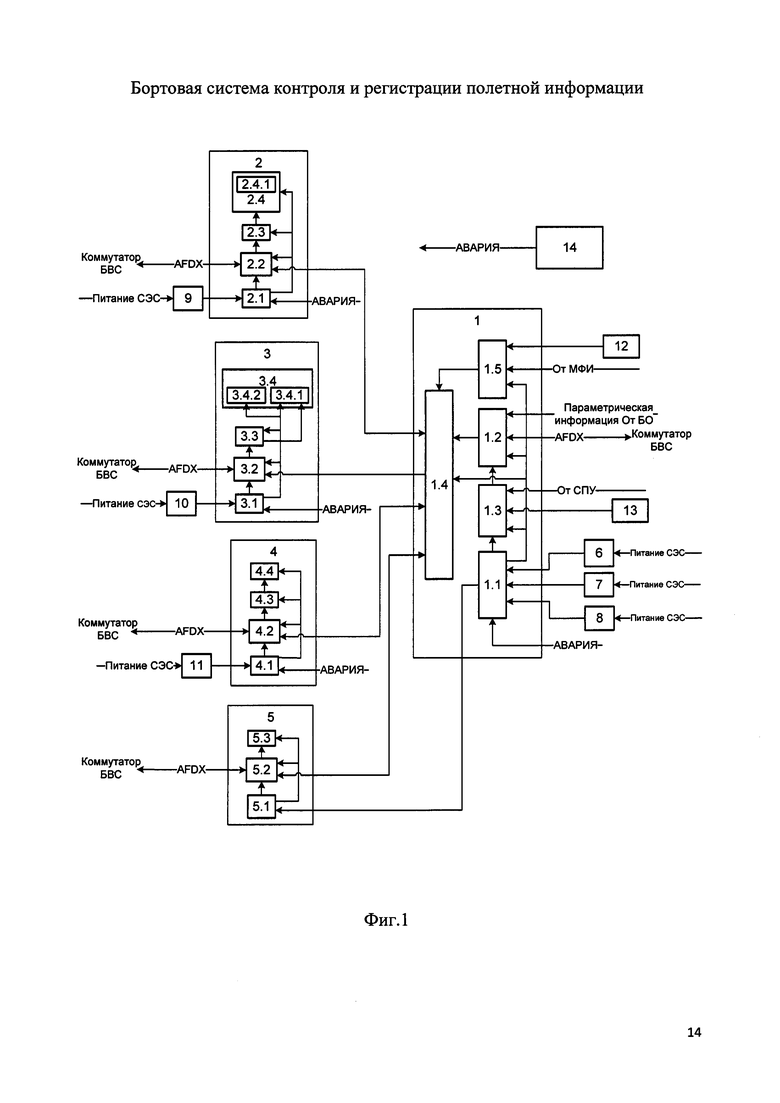
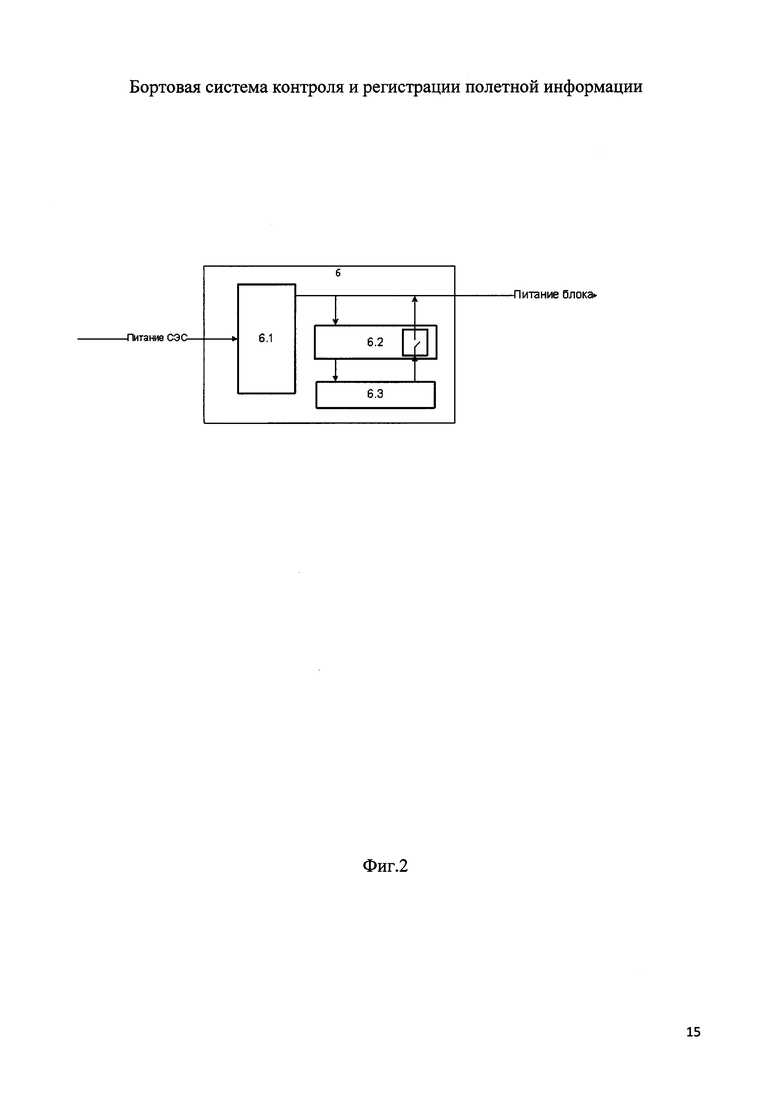
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена структурная схема устройства, а на фиг. 2 представлен блок РИП.
Бортовая система контроля и регистрации полетной информации содержит БЗВИ (1), ЗБН (2), СЗБН (3), ЭБН (4), СБН (5), РИП (6…11), видеокамеры (12), микрофоны (13) датчик аварии (14).
Устройство работает следующим образом.
Блок БЗВИ (1) принимает видеоинформацию от МФИ (на чертеже не обозначены), параметрическую информацию через информационные входы от бортового оборудования (на чертеже не обозначены), звук от СПУ (на чертеже не обозначены) и информацию по каналу AFDX от коммутатора БВС ЛА (на чертеже не обозначены).
Модуль питания (1.1) принимает напряжение питания от СЭС через блок РИП (6…8), фильтрует его и преобразовывает в питание, необходимое для работы остальных модулей блока, а также принимает разовую команду «Авария» от датчика аварии (14) и передает ее в модуль вычислительный (1.2). Модуль аудиоинформации (1.3) принимает аудиоинформацию микрофонов (13), усиливает сигналы, суммирует, оцифровывает и передает их в модуль вычислительный (1.2). Аудиоинформацию от каналов, идущих от СПУ, модуль аудиоинформации (1.3) принимает, обрабатывает и передает в модуль вычислительный (1.2). Модуль вычислительный (1.2) принимает параметрическую информацию от БО, осуществляет передачу информации в БО, осуществляет взаимодействие (прием и передачу информации) по каналу AFDX с БВС ЛА, принимает аудиоинформацию от модуля аудиоинформации (1.3), выполняет прием разовой команды «Авария» от модуля питания (1.1), передает информацию в модуль коммутатора каналов Ethernet (1.4) и осуществляет взаимодействие через него с блоками системы (2), (3), (4), (5). Модуль обработки видеоинформации (1.5) выполняет прием видеоинформации от МФИ и видеокамер (12) по каналам ARINC 818. Полученная видеоинформация сжимается и передается в модуль коммутатора каналов Ethernet (1.4). Модуль коммутатора каналов Ethernet (1.4) передает и принимает информацию от блоков системы (2), (3), (4), (5). Связь блока БЗВИ (1) с блоками системы (2), (3), (4), (5) через коммутатор каналов Ethernet (1.4) является резервным каналом передачи информации на случай, если не хватит пропускной способности коммутатору AFDX обработать всю информацию, проходящую через него. Введение резервирования повышает надежность устройства.
Блок ЗБН (2) принимает информацию по каналу AFDX от коммутатора БВС ЛА (на чертеже не обозначены), параметрическую, звуковую и видеоинформацию от блока БЗВИ (1).
Модуль питания (2.1) принимает напряжение питания от СЭС через блок РИП (9), фильтрует его и преобразовывает в питание, необходимое для работы остальных модулей блока, а также принимает разовую команду «Авария» от датчика аварии (14) и передает ее в модуль вычислительный (2.2). Модуль вычислительный (2.2) принимает параметрическую аудио- и видеоинформацию от блока БЗВИ (1) по оптическому каналу Ethernet, осуществляет взаимодействие с БВС ЛА (прием и передачу информации) по каналу AFDX, выполняет прием разовой команды «Авария» от модуля питания (2.1), передает информацию в модуль контроллера защищенного модуля памяти (2.3), который обрабатывает всю полученную информацию и передает на регистрацию в защищенный модуль памяти (2.4). В защищенном модуле памяти (2.4) полученная информация регистрируется по зонам в соответствии с заданным алгоритмом: зона аудиоинформации, зона параметрической информации, зона видеоинформации. В состав защищенного модуля памяти (2.4) входит акустический радиомаяк (2.4.1), который при попадании в воду, в случае аварии над водной поверхностью, начинает генерировать звук определенной частоты.
Блок СЗБН (3) принимает информацию по каналу AFDX от коммутатора бортовой вычислительной сети летательного аппарата (на чертеже не обозначены), параметрическую, звуковую и видеоинформацию от блока БЗВИ (1).
Модуль питания (3.1) принимает напряжение питания от СЭС через блок РИП (10), фильтрует его и преобразовывает в питание, необходимое для работы остальных модулей блока, а также принимает разовую команду «Авария» от датчика аварии (14) и передает ее в модуль вычислительный (3.2). Модуль вычислительный (3.2) принимает параметрическую аудио- и видеоинформацию от блока БЗВИ (1) по оптическому каналу Ethernet, осуществляет взаимодействие (прием и передачу информации) по каналу AFDX с БВС ЛА, выполняет прием разовой команды «Авария» от модуля питания (3.1), передает информацию в модуль контроллера защищенного модуля памяти (3.3), который обрабатывает всю полученную информацию и передает в сохраняемый модуль памяти (3.4), который в свою очередь состоит из защищенного модуля памяти (3.4.1) и модуля аварийного радиомаяка (3.4.2). Сохраняемый модуль памяти (3.4) предназначен для отделения от блока СЗБН в случае авиационного происшествия над водной поверхностью. Отделение происходит за счет срабатывания датчиков, определяющих, что блок находится в воде. Защищенный блок модуля памяти (3.4.1) принимает и регистрирует информацию по зонам в соответствии с заданным алгоритмом: зона аудиоинформации, зона параметрической информации, зона видеоинформации. Модуль аварийного радиомаяка (3.4.2) представляет собой устройство, предназначенное для передачи информации о месте нахождения блока в систему КОСПАС-САРСАТ. В состав модуля аварийного радиомаяка (3.4.2) входит также GPS/ГЛОНАСС приемник, обеспечивающий определение более точных координат нахождения отделившегося сохраняемого модуля памяти (3.4). Включение модуля аварийного радиомаяка (3.4.2) происходит в момент отделения сохраняемого модуля памяти (3.4) от блока СЗБН за счет включения внутреннего источника питания (на чертеже не обозначен).
Блок ЭБН (4) принимает информацию по каналу AFDX от коммутатора БВС ЛА (на чертеже не обозначены), параметрическую, звуковую и видеоинформацию от блока БЗВИ (1).
Модуль питания (4.1) принимает напряжение питания от СЭС через блок РИП (11), фильтрует его и преобразовывает в питание, необходимое для работы остальных модулей блока, а также принимает разовую команду «Авария» от датчика аварии (14) и передает ее в модуль вычислительный (4.2). Модуль вычислительный (4.2) принимает параметрическую, аудио- и видеоинформацию от блока БЗВИ (1) по оптическому каналу Ethernet, осуществляет взаимодействие (прием и передачу информации) по каналу AFDX с БВС ЛА, выполняет прием разовой команды «Авария» от модуля питания (4.1), передает информацию в модуль контроллера съемного накопителя (4.3), который обрабатывает всю полученную информацию и передает в съемный накопитель информации (4.4). Съемный накопитель информации (4.5) принимает информацию от модуля контроллера съемного накопителя (4.3) и регистрирует по зонам в соответствии с заданным алгоритмом: зона аудиоинформации, зона параметрической информации, зона видеоинформации. Съемный накопитель информации блока ЭБН предназначен для более оперативной обработки полетной информации.
Блок СБН (5) принимает информацию по каналу AFDX от коммутатора БВС ЛА (на чертеже не обозначены), параметрическую, звуковую и видеоинформацию от блока БЗВИ (1).
Модуль питания (5.1) принимает напряжение питания от модуля питания (1.1) блока БЗВИ (1), фильтрует его и преобразовывает в питание, необходимое для работы остальных модулей блока, а также принимает разовую команду «Авария» от модуля питания (1.1) блока БЗВИ (1) и передает ее в модуль вычислительный (5.2). Модуль вычислительный (5.2) принимает параметрическую аудио- и видеоинформацию от блока БЗВИ (1) по электрическому каналу Ethernet, осуществляет взаимодействие с бортовым оборудование (прием и передачу) по каналу AFDX, выполняет прием разовой команды «Авария» от модуля питания (5.1), передает информацию в модуль внутренней памяти (5.3), который обрабатывает и регистрирует всю полученную информацию. Модуль внутренней памяти (5.3) принимает информацию от модуля вычислительного (5.2) и регистрирует по зонам в соответствии с заданным алгоритмом: зона аудиоинформации, зона параметрической информации, зона видеоинформации. Блок СБН (5) предназначен для катапультирования вместе с летчиком в случае авиационного происшествия (АП). Данная функция блока СБН предназначена для более оперативной обработки зарегистрированной информации в случае АП, до момента пока не найден защищенный бортовой накопитель ЗБН и сохраняемый защищенный бортовой накопитель СЗБН.
Каждый блок РИП (6…11), представленный на фиг. 1, работает идентично. Далее принцип работы рассмотрен на примере одного блока РИП (6), приведенного на фиг. 2. Блок РИП (6) принимает питание от СЭС ЛА, преобразует его и накапливает внутри себя для обеспечения питания блоков системы в случае пропадания электропитания от СЭС. Блок РИП может быть запитан от 2-х напряжений системы электроснабжения самолета (СЭС):
- от постоянного тока напряжением 27 вольт. В этом случае в нормальном режиме работы РИП пропускает через себя постоянный ток бортовой сети в блоки системы, не корректируя его, но при этом заряжая внутренний источник энергии;
- от сети переменного тока напряжением 115 вольт. В этом случае РИП преобразует переменный ток в постоянный, который выходит в блоки сети, а также заряжает внутренний источник энергии.
Питание от СЭС ЛА подается на модуль питания РИП (6.1), осуществляющий фильтрацию электромагнитных помех как, так и СЭС, и собственных модулей. Напряжение с выхода модуля питания РИП (6.1) подается на модуль управления, коммутации и заряда (6.2). Выходы модуля управления, коммутации и заряда (6.2), осуществляют электрический заряд устройства накопления энергии (6.3). Модуль управления, коммутации и заряда (6.2) также выполняет функцию измерения напряжения на устройстве накопления энергии (6.3) с целью контроля процессов заряда-разряда. При подключении питания СЭС ЛА РИП через модуль управления, коммутации и заряда (6.2) начинает функцию заряда устройства накопления энергии (6.3). По окончании заряда, модуль управления, коммутации и заряда (6.2) переключается в режим поддержания заряда для компенсирования саморазряда устройства накопления энергии (6.3). При наступлении события пропадания питания от СЭС ЛА, модуль управления, коммутации и заряда (6.2) коммутирует выход устройства накопления энергии на выход блока РИП (6) для обеспечения питания подключенного к нему блока. При полном разряде устройства накопления энергии, РИП отключит питание от подключенного блока. В случае восстановления питания от СЭС ЛА, РИП восстановит запитывание от СЭС ЛА и повторно проведет заряд устройства накопления энергии (6.3).
Бортовая система контроля и регистрации полетной информации позволяет расширить функциональные возможности системы регистрации полетной информации за счет введения дополнительного блока, обеспечивающего резервным питанием блоки системы, за счет резервирования канала передачи полетной информации, за счет осуществления мониторинга состояния информационного канала самолетных систем, а также повысить уровень электромагнитной совместимости системы за счет внедрения межблочных оптических каналов связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННАЯ СИСТЕМА СБОРА, КОНТРОЛЯ, ОБРАБОТКИ И РЕГИСТРАЦИИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 2012 |
|
RU2528092C2 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА СБОРА, КОНТРОЛЯ, ОБРАБОТКИ И РЕГИСТРАЦИИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 2013 |
|
RU2530701C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ РАЗНОРОДНОЙ АРХИТЕКТУРЫ | 2015 |
|
RU2592193C1 |
| РЕГИСТРАТОР | 2014 |
|
RU2571775C2 |
| СИСТЕМА РЕГИСТРАЦИИ ДАННЫХ | 2012 |
|
RU2497082C1 |
| КОМПЛЕКС БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ ЛЕГКОГО МНОГОЦЕЛЕВОГО САМОЛЕТА | 2002 |
|
RU2215668C1 |
| СИСТЕМА СБОРА И РЕГИСТРАЦИИ ДАННЫХ | 2009 |
|
RU2401988C1 |
| БОРТОВАЯ СИСТЕМА СБОРА, ОБРАБОТКИ И РЕГИСТРАЦИИ ИНФОРМАЦИИ | 2005 |
|
RU2286538C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА НА ОСНОВЕ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2015 |
|
RU2605222C1 |
| УСТРОЙСТВО СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ | 2007 |
|
RU2349878C1 |
Изобретение относится к информационно-измерительной технике и может быть использовано для сбора и регистрации полетных данных, сохранения их в случае летных происшествий, а также для эксплуатационного контроля авиационных систем и оборудования. Технический результат - расширение функциональных возможностей системы, за счет обеспечения резервного питания, резервирования передачи аварийного кадра на регистрацию полетной информации, осуществления мониторинга состояния информационного канала самолетных систем с составлением отчета, увеличение пропускной способности межблочного обмена. Для этого система содержит защищенный бортовой накопитель ЗБН, сохраняемый защищенный бортовой накопитель СЗБН, эксплуатационного бортового накопителя ЭБН, спасаемый бортовой накопитель СБН; блок сбора звуковой и видеоинформации БЗВИ, при этом каждый из блоков: БЗВИ, ЗБН, СЗБН, ЭБН, подключен по шине AFDX к коммутатору бортовой вычислительной сети летательного аппарата; резервные источники питания РИП, которые подключены к каждому блоку системы (за исключением блока СБН): к блокам ЗБН, СЗБН, ЭБН по одному блоку РИП, а к блоку БЗВИ 3 блока РИП; 2 видеокамеры, которые подключены к блоку БЗВИ и каждая из которых связана с ним через один канал APINC 818, микрофон, который подключен к блоку БВИ, а к блоку БЗВИ подключены каналы от многофункциональных индикаторов МФИ, при этом выход блока БЗВИ соединен с входом блока СБН, который подключен к блоку БЗВИ, блок БЗВИ связан с блоком МСБН, блоки системы, включая блок БЗВИ, подключены к общей шине питания летательного аппарата, причем к блоку БЗВИ подключены информационные входы, датчик аварии, который подключен к каждому блоку системы и предназначен для формирования сигнала «Авария». 2 ил.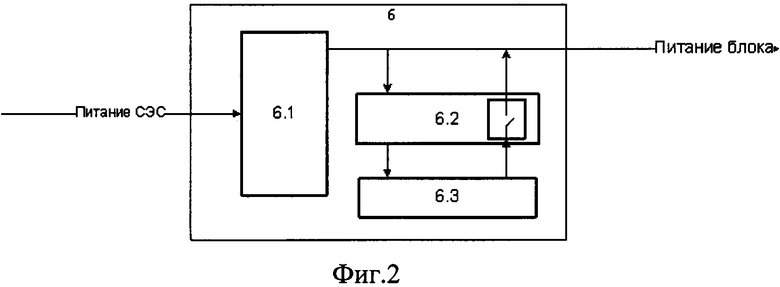
Бортовая система контроля и регистрации полетной информации, характеризующаяся тем, что содержит защищенный бортовой накопитель ЗБН, который состоит из модуля питания, вычислительного модуля, контроллера защищенного накопителя и защищенного накопителя; сохраняемый защищенный бортовой накопитель СЗБН, который состоит из модуля питания, вычислительного модуля, контроллера и сохраняемого модуля памяти, состоящего из защищенного накопителя и модуля аварийного радиомаяка с модулем GPS/ГЛОНАСС, предназначенного для передачи информации о месте нахождения блока в систему КОСПАС-САРСАТ; эксплуатационный бортовой накопитель ЭБН, который состоит из модуля питания, вычислительного модуля, контроллера съемного накопителя информации и съемного накопителя информации; спасаемый бортовой накопитель СБН, который состоит из модуля питания, вычислительного модуля и модуля внутренней памяти; блок сбора звуковой и видеоинформации БЗВИ, который состоит из модуля питания, модуля вычислительного, модуля обработки аудиоинформации, модуля обработки видеоинформации, модуля коммутатора каналов Ethernet, соединенных между собой по каналу Ethernet через модуль коммутатора каналов Ethernet, входящего в состав блока БЗВИ, при этом каждый из блоков: БЗВИ, ЗБН, СЗБН, ЭБН, подключен по шине AFDX к коммутатору бортовой вычислительной сети летательного аппарата; резервные источники питания РИП, которые подключены к каждому блоку системы, за исключением блока СБН, а именно: к блокам ЗБН, СЗБН, ЭБН по одному блоку РИП, а к блоку БЗВИ 3 блока РИП; видеокамеры, которые подключены к блоку БЗВИ и каждая из которых связана с ним через один канал ARINC 818, микрофоны, которые подключены к блоку БЗВИ, к блоку БЗВИ подключены каналы от многофункциональных индикаторов МФИ, предназначенные для передачи в блок БЗВИ видеоинформации, при этом выход блока БЗВИ соединен со входом блока СБН для обеспечения питанием блока СБН и передачи в него команды «Авария», а также взаимосвязи по каналу Ethernet, блок СБН подключен к блоку БЗВИ при помощи отрывного соединителя, который обеспечивает возможность катапультироваться блоку СБН вместе с летчиком, блоки системы, включая блок БЗВИ, подключены к общей системе электроснабжения летательного аппарата через блоки резервных источников питания, причем к блоку БЗВИ подключены информационные входы, предназначенные для приема информации от бортового оборудования, датчик аварии, который подключен к каждому блоку системы, кроме блока СБН, и предназначен для формирования сигнала «Авария».
| СИСТЕМА РЕГИСТРАЦИИ ДАННЫХ | 2009 |
|
RU2427802C1 |
| Устройство для поперечного спуска судов | 1960 |
|
SU134154A1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА СБОРА, КОНТРОЛЯ, ОБРАБОТКИ И РЕГИСТРАЦИИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 2013 |
|
RU2530701C1 |
| US 6735505 B2, 11.05.2004 | |||
| БОТУЗ С.П | |||
| Интеллектуальные интерактивные системы и технологии управления удаленным доступом | |||
| - М.: СОЛОН-Пресс, 2014, с | |||
| Рогульчатое веретено | 1922 |
|
SU142A1 |

