Устройство сбора и обработки информации относится к информационно-измерительной технике и может быть использовано для сбора и обработки полетных данных, сохранения этой информации в случае летных происшествий, а также для эксплуатационного контроля систем и оборудования самолета.
Известно устройство сбора и обработки информации, содержащее коммутатор аналоговых сигналов, согласующее устройство, преобразователь частота-код, нормализаторы переменного и постоянного токов, устройство масштабирования, преобразователь напряжения-частота, устройство сбора данных, преобразователь кодов, устройство программного управления (см. Автоматизированная обработка полетной информации. Под ред. В.Н.Букова. М., Воениздат, 1995 г., стр.87-92).
Недостатком этого устройства являются значительные аппаратурные затраты и низкий уровень программного обеспечения, обусловленные принципом построения структурной схемы устройства, что влечет за собой снижение быстродействия и надежности работы устройства и увеличение его массогабаритных показателей.
Наиболее близким по технической сущности к заявляемому устройству является устройство сбора и обработки информации, содержащее коммутатор аналоговых параметров и усилитель милливольтовых сигналов, подключенные к входу многоканального аналого-цифрового преобразователя, устройство программного управления (первый микроконтроллер) и устройство сбора данных (второй микроконтроллер, энергонезависимое запоминающее устройство ЗУ и второе оперативное ЗУ, соединенные между собой двусторонней связью) с подключенным к их входам синхронизатором, коммутатор разовых команд, блок приемо-передатчиков последовательных кодов, подключенных двусторонней связью к первому ОЗУ и к устройству управления (третьему микроконтроллеру), нормализатор частотных сигналов, бортовую микроЭВМ (БЦВМ), формирователь команд управления и передатчик последовательных кодов, соединенных между собой двусторонней связью, устройство встроенного контроля и преобразователь кодов (узел связи с накопителями информации) соединены двусторонней связью с устройством сбора данных (см. патент РФ №2125239, МПК6 G01D 9/00, 9/28).
Однако известное устройство не обеспечивает достоверность приема милливольтовых сигналов, так как сигналы милливольтового диапазона поступают на коммутатор-усилитель без синхронизации с устройством программного управления, выполненного на микроконтроллере, не имеет возможности увеличивать количество одновременно обрабатываемых дискретных сигналов с фильтрацией помехи, что отрицательно сказывается на достоверности принимаемой информации, имеет низкую надежность.
Технический результат заявляемого изобретения выражается в обеспечении достоверности принимаемой информации и повышении надежности устройства.
Для достижения технического результата в устройство сбора и обработки информации, содержащее многоканальный аналого-цифровой преобразователь (АЦП), ко входам которого подключены коммутатор аналоговых сигналов (АС), коммутатор-усилитель милливольтовых (MB) сигналов и первый микроконтроллер, к выходу которого подключен коммутатор АС, а ко входам - синхронизатор, нормализатор частотных сигналов (ЧС) и через рабочую магистраль - второй микроконтроллер с подключенными к его входам синхронизатором и через другую магистраль энергонезависимым запоминающим устройством ПЗУ, первым оперативным запоминающим устройством (ОЗУ), узлом связи с накопителями и узлом встроенного контроля, коммутатор разовых команд, блок приемо-передатчиков последовательных кодов, подключенный двусторонней связью ко второму ОЗУ и к третьему микроконтроллеру, подключенному к рабочей магистрали, к которой подключен четвертый микроконтроллер, соединенный двусторонней связью через третью магистраль с формирователем команд управления и передатчиком последовательных кодов, введены пятый микроконтроллер, коммутатор локальной сети и резервная магистраль, причем пятый микроконтроллер соединен двусторонней связью с коммутатором разовых команд и через резервную и рабочую магистрали с остальными микроконтроллерами, коммутатор локальной сети соединен двусторонней связью с третьим и четвертым микроконтроллерами, выход первого микроконтроллера соединен с коммутатором-усилителем MB сигналов.
Выход коммутатора локальной сети подключен к накопителям информации и/или к системе наземной обработки (канал типа Ethernet).
На чертеже представлена структурная схема устройства сбора и обработки информации.
Устройство сбора и обработки информации построено по модульному принципу и состоит из отдельных автономных модулей, количество которых, при необходимости, может наращиваться: аналогового модуля, модуля разовых команд, модуля приема и передачи последовательных кодов (ПК), модуля управления и сбора данных и модуля контроля.
Аналоговый модуль содержит коммутатор 1 АС, на входы которого поступают аналоговые сигналы от бортовых датчиков, и коммутатор-усилитель 2 MB сигналов, на входы которого поступают сигналы постоянного тока низкого уровня, выходы которых подключены к многоканальному АЦП 3, нормализатор 4 ЧС, на входы которого поступают сигналы с частотных датчиков, а выход подключен к первому входу первого микроконтроллера 5 (МК5).
Модуль разовых команд включает в себя коммутатор 6 разовых команд и пятый микроконтроллер 7 - (МК7), по инструкции которого происходит подключение разовых команд в коммутаторе 6.
Модуль приема и передачи ПК - независимый модуль, принимающий и передающий коды по каналам связи ARINC 429 или MIL-STD-1553 и состоящий из микроконтроллера 8 (МК8), соединенного двусторонней связью с блоком 9 приемо-передатчиков ПК и ОЗУ 10.
Модуль управления и сбора данных содержит микроконтроллер 11 (МК11), соединенный двусторонней связью через магистраль 12 с ПЗУ 13, ОЗУ 14, узлом 15 связи с накопителями информации и узлом 16 встроенного контроля. Узел 15 связи предназначен для передачи обработанной информации по последовательному коду типа ARINC 717, RS 422 и т.п.
Модуль контроля содержит микроконтроллер 17 (МК17), соединенный двусторонней связью через магистраль 18 с формирователем 19 команд управления и передатчиком 20 последовательных кодов. Коммутатор 21 локальной сети соединен двусторонней связью с МК11 и МК17. Выходы синхронизатора 22 соединены с входами МК5 и МК11. Микроконтроллеры 5, 7, 8, 11 и 17 соединены между собой двусторонней связью через рабочую и резервную магистрали 23 и 24.
Все микроконтроллеры представляют собой устройства, состоящие из процессора DSP семейства TMS 5000 фирмы Texas Instrument (США).
Устройство работает следующим образом.
Информация от датчиков аналоговых параметров, за исключением сигналов тока низкого уровня и частотных сигналов, поступает на коммутатор 1 аналоговых сигналов, который в соответствии с командами МК5 подключает измерительные каналы к многоканальному АЦП 3.
Сигналы постоянного тока низкого уровня поступают на коммутатор-усилитель 2 MB сигналов, который также в соответствии с командами МК5 осуществляет коммутацию и усиление MB сигналов заданных каналов и подключает их к АЦП 3.
Частотные сигналы от частотных датчиков поступают на нормализатор 4 ЧС, который преобразует частотные сигналы с бортовых датчиков в меандры логического уровня.
Работа МК5 и МК11 синхронизируется синхронизатором 22. При получении синхроимпульса с синхронизатора 22 МК5 в соответствии с программой работы подключает через коммутатор 1 АС и коммутатор-усилитель MB сигналов заданные для данного момента времени каналы, устанавливает масштаб и обрабатывает информацию, поступающую с АЦП 3, что обеспечивает достоверность считываемой информации для данного момента времени.
С нормализатора 4 меандр поступает на МК5, где выделяется период сигнала и производится подсчет импульсов высокой частоты за период. Результаты обработки аналоговых сигналов поступают на микроконтроллеры МК17 и МК11 через магистрали 23 и 24.
В соответствии с программой МК7 подключает разовые команды с учетом их номера и типа и производит измерение входных сигналов по нескольким каналам одновременно, параллельно проводя селекцию разовых команд (из трех измерений результат выдается по двум). Значения всех разовых команд определяются за 3 мс и передаются на МК11 и МК17 по магистралям 23 или 24, что позволяет увеличить количество одновременно обрабатываемых дискретных сигналов с фильтрацией помехи, следовательно, повышается скорость обработки и достоверность принимаемой информации.
Каждый приемник и передатчик блока 9 приемо-передатчиков ПК настраивается на соответствующую частоту третьим МК8. После преобразования информационная часть каждого слова в соответствии с номером приемника ПК и адресом размещается в определенной ячейке ОЗУ 10. МК8 по магистралям 23 и 24 передает информацию в МК11 и МК17.
Четвертый МК17, формирователь 19 команд управления и передатчик 20 последовательных кодов служат для проведения операций предполетного, полетного и послеполетного контроля. Формирователь 19 команд управления преобразует сигналы, поступающие с МК17, в сигналы с требуемыми электрическими характеристиками, которые обеспечивают включение встроенного контроля систем летательного аппарата (ЛА). В режиме полетного контроля МК17 осуществляет оперативную обработку информации в соответствие с алгоритмами бортовой обработки и через передатчик 20 последовательных кодов выдает результаты контроля на защищенный бортовой накопитель (ЗБН) и систему отображения информации ЛА (СОИ). При необходимости результаты контроля могут выдаваться через коммутатор 21 локальной сети в накопители информации и/или в систему наземной обработки. При проведении наземного контроля оборудования ЛА МК17 формирует и выдает через формирователь 19 и через модуль приема и передачи ПК команды управления в сопрягаемые бортовые системы. Переключение МК17 в режим наземного и полетного контроля осуществляется по специальным сигналам, получаемым по входам РК или ПК. Обмен информацией между МК17, формирователем 19 и передатчиком 20 осуществляется по магистрали 18.
Третий МК11 по магистралям 23 и 24 собирает результаты обработки аналоговых сигналов, дискретных сигналов и от приемников последовательных кодов в соответствии с программой, заложенной в ПЗУ 13, и распределяет по ячейкам в ОЗУ 14. Затем информация из ОЗУ 14 через узел 15 связи поступает в накопители информации. В процессе всей работы МК11 проводит встроенный контроль каждого модуля, и интегральный сигнал исправности поступает в узел 16 встроенного контроля для выдачи в сопрягаемые системы.
Узел 16 встроенного контроля обеспечивает прием и передачу в МК11 сигналов исправности от сопрягаемых блоков, и после обработки через узел 16 суммарный сигнал исправности выдается в сопрягаемые системы. Связь МК11 с ПЗУ 13, ОЗУ 14, узлом 15 связи с накопителями и узлом 16 встроенного контроля осуществляется по магистрали 12.
При увеличении потока информации от внешних датчиков или при увеличении числа модулей использование резервной магистрали 24 позволяет увеличить пропускную способность устройства, а при отказе рабочей магистрали - заменить ее, что повышает надежность устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СБОРА И РЕГИСТРАЦИИ ИНФОРМАЦИИ | 1998 |
|
RU2125239C1 |
| УНИВЕРСАЛЬНЫЙ МОДУЛЬ ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ | 2009 |
|
RU2439500C2 |
| МНОГОКАНАЛЬНЫЙ ЭЛЕКТРОННЫЙ РЕГИСТРАТОР | 2009 |
|
RU2411453C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЭФФЕКТИВНОСТИ ЭНЕРГОИСПОЛЬЗОВАНИЯ В ПОТРЕБИТЕЛЬСКИХ ЭНЕРГЕТИЧЕСКИХ СИСТЕМАХ | 2011 |
|
RU2458445C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ИНФОРМАЦИИ | 1996 |
|
RU2097703C1 |
| СПОСОБ СТРУКТУРИРОВАНИЯ И ЗАПИСИ ЦИФРОВОЙ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2280273C2 |
| ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 2004 |
|
RU2253842C1 |
| СПОСОБ ТЕХНИЧЕСКОГО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ БОРТОВЫХ СИСТЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ПОДДЕРЖКОЙ ПРИНЯТИЯ РЕШЕНИЙ И КОМПЛЕКС КОНТРОЛЬНО-ПРОВЕРОЧНОЙ АППАРАТУРЫ С ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМОЙ ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2557771C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И ВОССТАНОВЛЕНИЯ ТЕХНИЧЕСКИХ СРЕДСТВ МЕДИЦИНСКОГО НАЗНАЧЕНИЯ | 1992 |
|
RU2072788C1 |
| КОМПЛЕКС ДЛЯ ПРОВЕРКИ БОРТОВЫХ СИСТЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2205441C1 |
Устройство сбора и обработки информации относится к информационно-измерительной технике и может быть использовано для сбора и обработки полетных данных, сохранения этой информации в случае летных происшествий, а также для эксплуатационного контроля систем и оборудования самолета. Устройство содержит пять микроконтроллеров, соединенных между собой двусторонними связями через рабочую и резервную магистрали, многоканальный аналого-цифровой преобразователь (АЦП), коммутатор аналоговых сигналов (АС), коммутатор-усилитель милливольтовых (MB) сигналов, нормализатор частотных сигналов (ЧС), синхронизатор, энергонезависимое запоминающее устройство ПЗУ, два оперативных запоминающих устройств (ОЗУ), узел связи с накопителями информации, узел встроенного контроля, коммутатор разовых команд, блок приемопередатчиков последовательных кодов, формирователь команд управления, передатчик последовательных кодов, коммутатор локальной сети. Благодаря введению в устройство сбора и обработки информации пятого микроконтроллера, резервной магистрали и соответствующих связей повышаются достоверность принимаемой информации и надежность устройства. 1 з.п. ф-лы, 1 ил.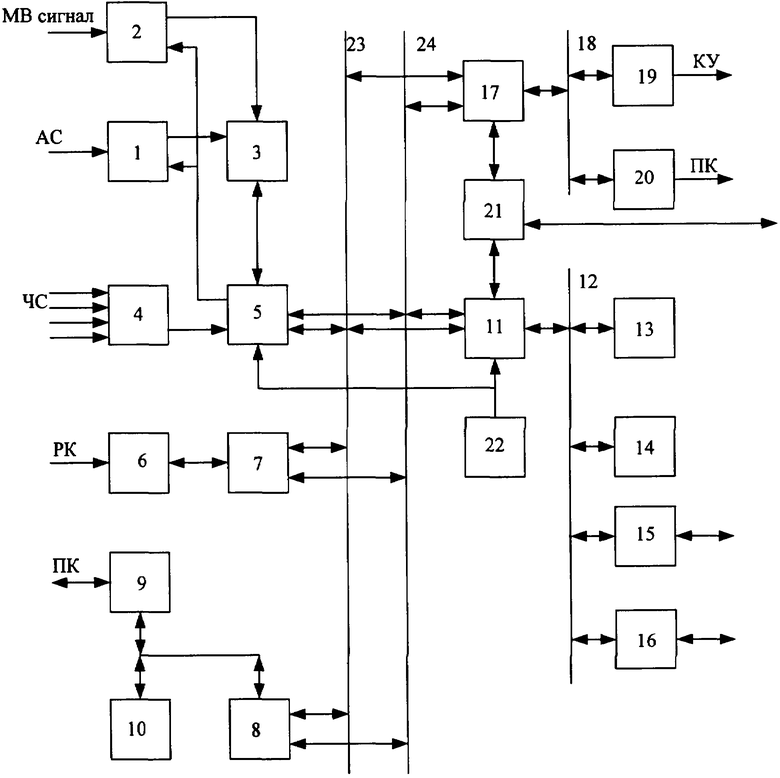
| УСТРОЙСТВО СБОРА И РЕГИСТРАЦИИ ИНФОРМАЦИИ | 1998 |
|
RU2125239C1 |
| УСТРОЙСТВО СБОРА И РЕГИСТРАЦИИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 2004 |
|
RU2274834C1 |
| СИСТЕМА СБОРА, РЕГИСТРАЦИИ, ПЕРЕДАЧИ, ОБРАБОТКИ И АНАЛИЗА, ПРЕИМУЩЕСТВЕННО ПОЛЕТНОЙ ИНФОРМАЦИИ О ПАРАМЕТРАХ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ, ПРЕИМУЩЕСТВЕННО ВОЗДУШНЫХ СУДОВ | 2001 |
|
RU2194307C1 |
| УСТРОЙСТВО ДЛЯ СБОРА, РЕГИСТРАЦИИ И СТАТИСТИЧЕСКОЙ ОБРАБОТКИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 1996 |
|
RU2115163C1 |
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| СПОСОБ ПОЛУЧЕНИЯ АМОРФНОЙ ЛЕНТЫ | 1989 |
|
SU1775929A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| ДОМЕННАЯ ПЕЧЬ | 2008 |
|
RU2406766C2 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| JP | |||

